
Automated Workers’ Ergonomic Risk Assessment in Manual Material Handling Using sEMG Wearable Sensors and Machine Learning


 and
and 
Abstract
:1. Introduction
2. Literature Review
2.1. Workers’ Ergonomic Risk Assessment
2.2. Research Motivation
2.3. Contributions
3. Research Methodology
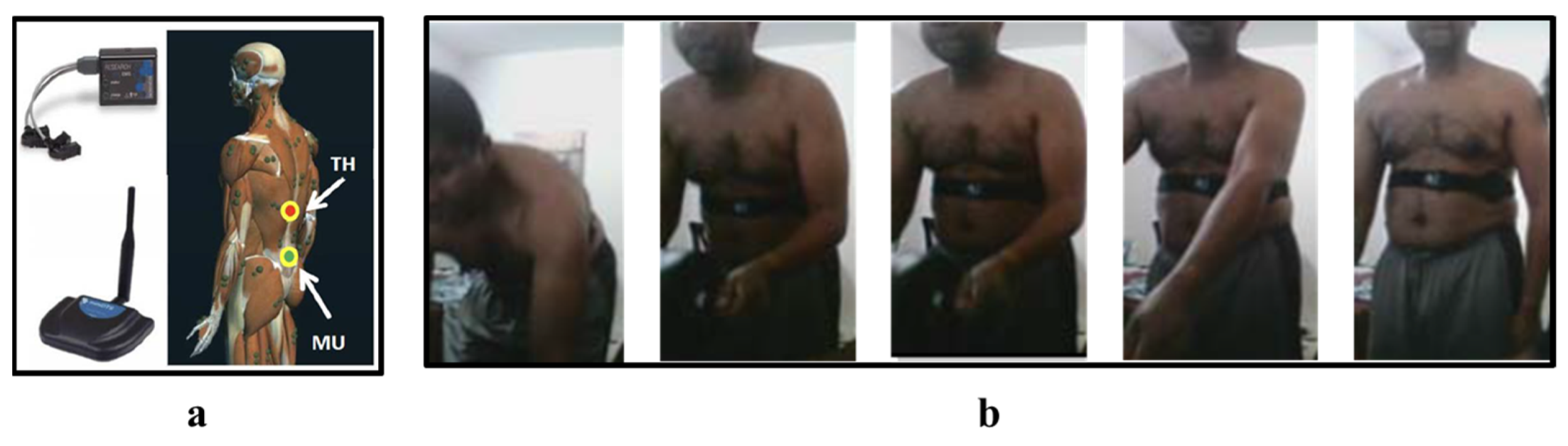
3.1. EMG System
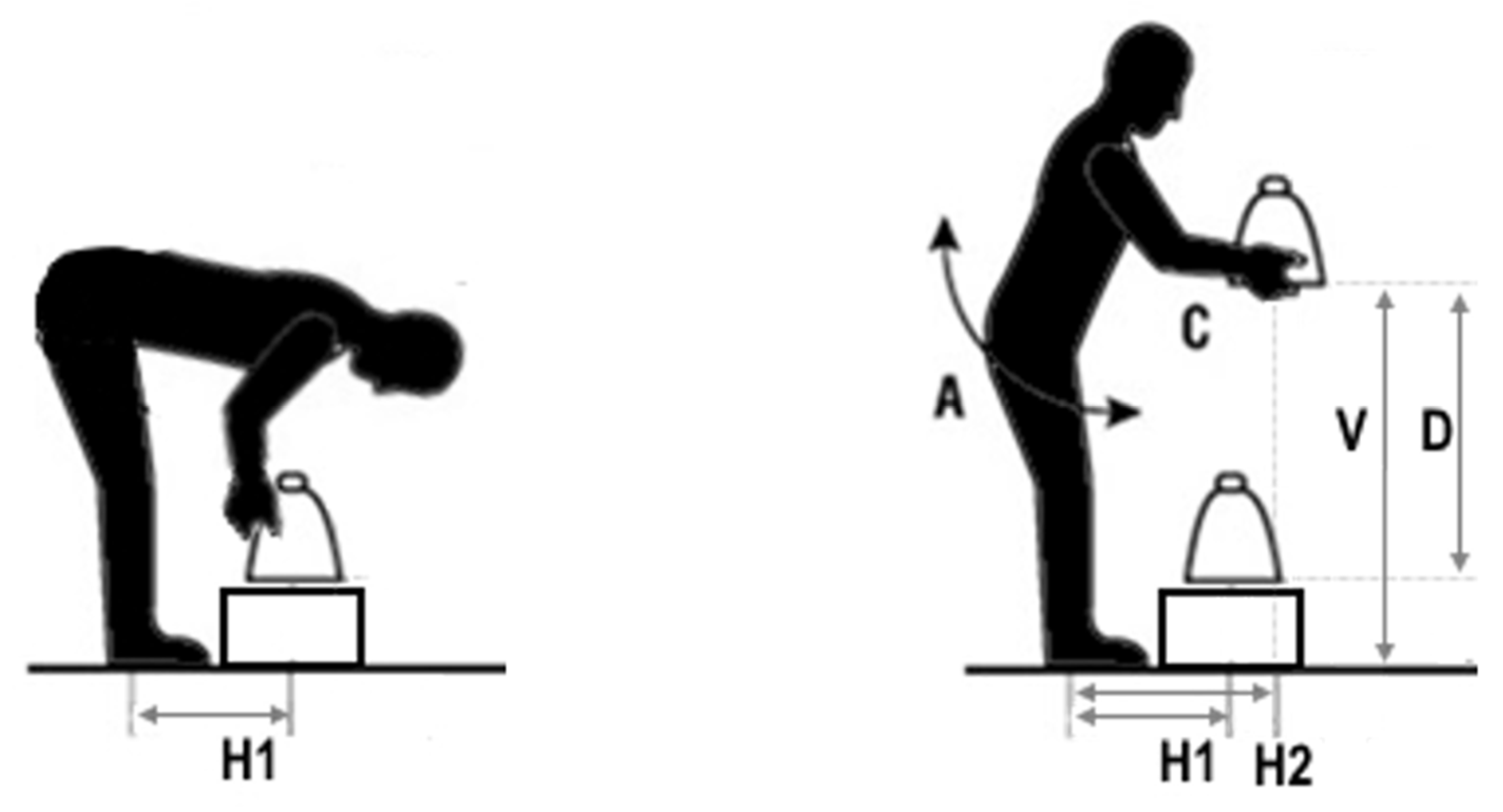
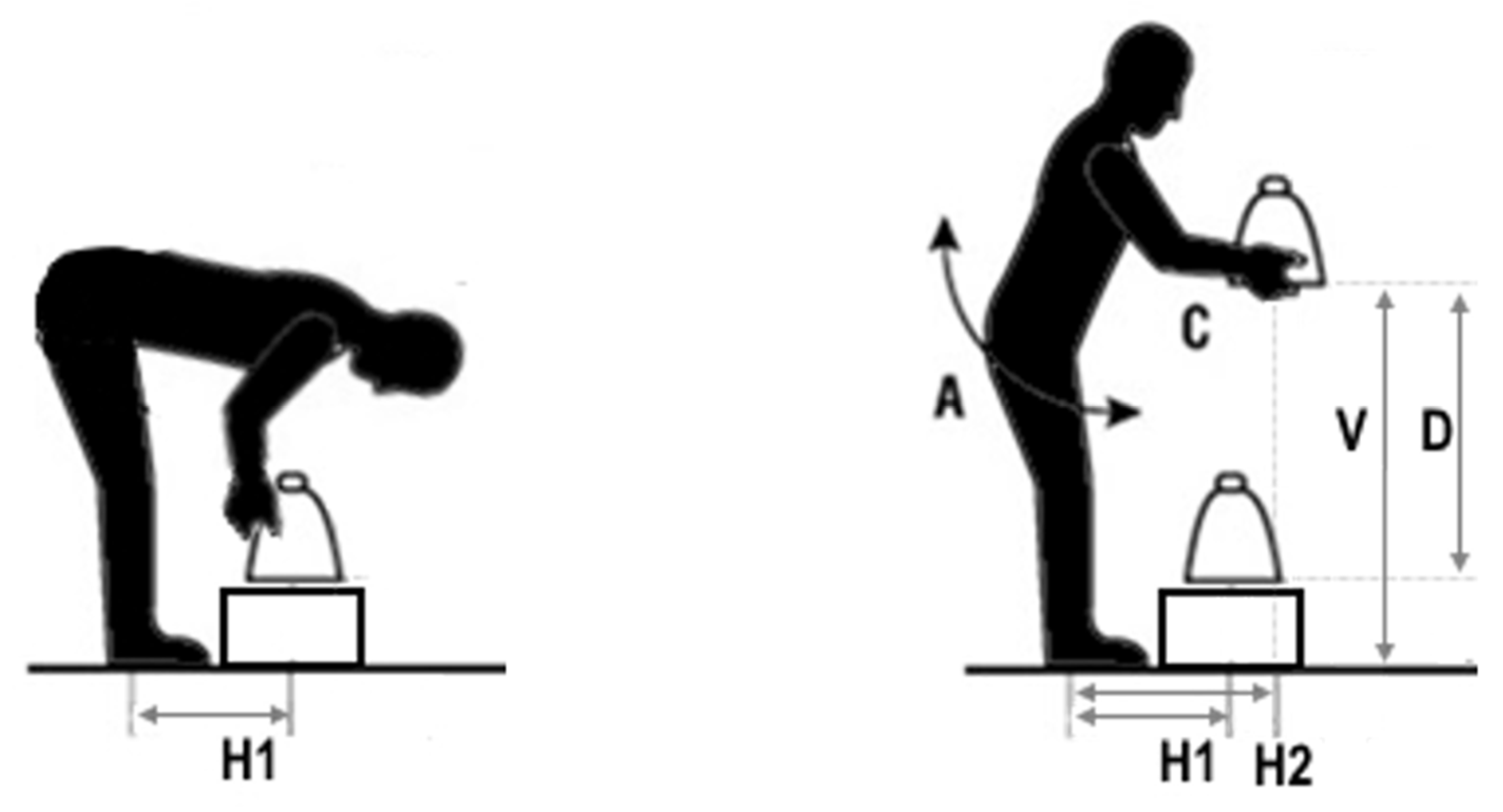
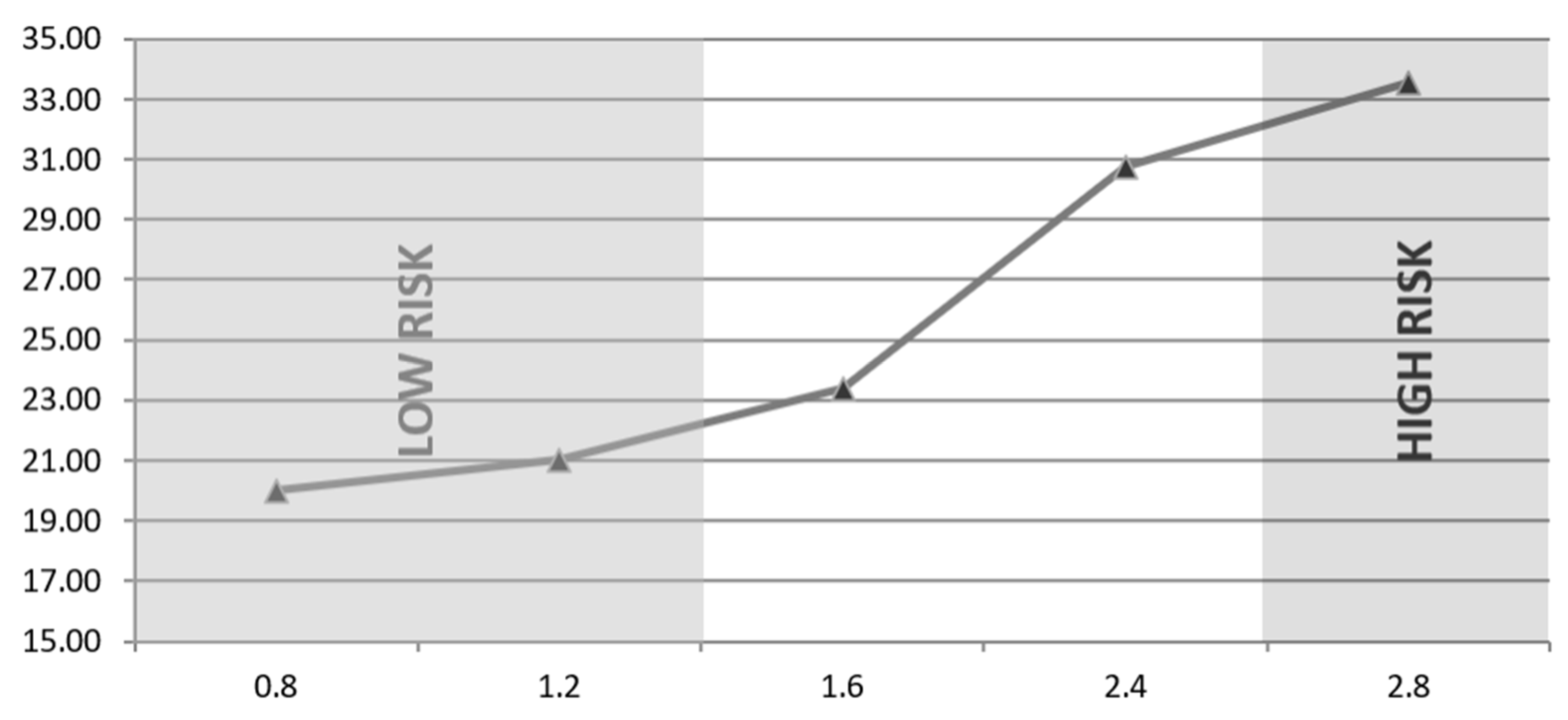
3.2. NIOSH Lifting Equation
3.3. Experiments
4. Data Analysis
4.1. Machine Learning Classification Algorithms
4.1.1. Decision Tree
4.1.2. Support Vector Machine (SVM)
4.1.3. K-Nearest Neighbor (KNN)
4.1.4. Random Forest
4.2. Model Development
4.3. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Armstrong, T.J.; Buckle, P.; Fine, L.J.; Hagberg, M.; Jonsson, B.; Kilbom, A.; Kuorinka, I.A.; Silverstein, B.A.; Sjogaard, G.; Viikari-Juntura, E.R. A conceptual model for work-related neck and upper-limb musculoskeletal disorders. Scand. J. Work. Environ. Health 1993, 19, 73–84. [Google Scholar] [CrossRef] [PubMed]
- Alireza Ahankoob, A.A. Mitigating Ergonomic Injuries in Construction Industry. IOSR J. Mech. Civ. Eng. 2013, 6, 36–42. [Google Scholar] [CrossRef]
- Akhavian, R.; Behzadan, A.H. Simulation-based evaluation of fuel consumption in heavy construction projects by monitoring equipment idle times. In Proceedings of the 2013 Winter Simulations Conference (WSC), Washington, DC, USA, 8–11 December 2013; pp. 3098–3108. [Google Scholar]
- Mansouri, S.; Castronovo, F.; Akhavian, R. Analysis of the synergistic effect of data analytics and technology trends in the AEC/FM industry. J. Constr. Eng. Manag. 2020, 146, 04019113. [Google Scholar] [CrossRef]
- Akhavian, R.; Brito, L.; Behzadan, A. Integrated mobile sensor-based activity recognition of construction equipment and human crews. In Proceedings of the 2015 Conference on Autonomous and Robotic Construction of Infrastructure, Ames, IA, USA, 2–3 June 2015; pp. 1–20. [Google Scholar]
- Waters, T.R.; Putz-Anderson, V.; Garg, A. Application Manual for the Revised NIOSH Equation; Department of Health and Human Services: Cincinnati, OH, USA, 1994.
- Waters, T.R. National efforts to identify research issues related to prevention of work-related musculoskeletal disorders. J. Electromyogr. Kinesiol. 2004, 14, 7–12. [Google Scholar] [CrossRef]
- Jia, B.; Kim, S.; Nussbaum, M.A. An EMG-based model to estimate lumbar muscle forces and spinal loads during complex, high-effort tasks: Development and application to residential construction using prefabricated walls. Int. J. Ind. Ergon. 2011, 41, 437–446. [Google Scholar] [CrossRef]
- Pascual, S.A.; Naqvi, S. An Investigation of Ergonomics Analysis Tools Used in Industry in the Identification of Work-Related Musculoskeletal Disorders. Int. J. Occup. Saf. Ergon. 2008, 14, 237–245. [Google Scholar] [CrossRef] [Green Version]
- Schoenmarklin, R.W.; Marras, W.S.; Leurgans, S.E. Rapid Communication Industrial wrist motions and incidence of hand/wrist cumulative trauma disorders. Ergonomics 1994, 37, 1449–1459. [Google Scholar] [CrossRef]
- Roberts, D.; Torres Calderon, W.; Tang, S.; Golparvar-Fard, M. Vision-Based Construction Worker Activity Analysis Informed by Body Posture. J. Comput. Civ. Eng. 2020, 34, 04020017. [Google Scholar] [CrossRef]
- Nath, N.D.; Akhavian, R.; Behzadan, A.H. Ergonomic analysis of construction worker’s body postures using wearable mobile sensors. Appl. Ergon. 2017, 62, 107–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahn, C.R.; Lee, S.; Sun, C.; Jebelli, H.; Yang, K.; Choi, B. Wearable Sensing Technology Applications in Construction Safety and Health. J. Constr. Eng. Manag. 2019, 145, 03119007. [Google Scholar] [CrossRef]
- Bangaru, S.S.; Wang, C.; Aghazadeh, F. Data Quality and Reliability Assessment of Wearable EMG and IMU Sensor for Construction Activity Recognition. Sensors 2020, 20, 5264. [Google Scholar] [CrossRef]
- Valero, E.; Sivanathan, A.; Bosché, F.; Abdel-Wahab, M. Musculoskeletal disorders in construction: A review and a novel system for activity tracking with body area network. Appl. Ergon. 2016, 54, 120–130. [Google Scholar] [CrossRef] [PubMed]
- Akhavian, R.; Behzadan, A.H. Smartphone-based construction workers’ activity recognition and classification. Autom. Constr. 2016, 71, 198–209. [Google Scholar] [CrossRef]
- Bayat, A.; Pomplun, M.; Tran, D.A. A Study on Human Activity Recognition Using Accelerometer Data from Smartphones. Procedia Comput. Sci. 2014, 34, 450–457. [Google Scholar] [CrossRef] [Green Version]
- Sherafat, B.; Ahn, C.R.; Akhavian, R.; Behzadan, A.H.; Golparvar-Fard, M.; Kim, H.; Lee, Y.-C.; Rashidi, A.; Azar, E.R. Automated Methods for Activity Recognition of Construction Workers and Equipment: State-of-the-Art Review. J. Constr. Eng. Manag. 2020, 146, 03120002. [Google Scholar] [CrossRef]
- Yang, Z.; Yuan, Y.; Zhang, M.; Zhao, X.; Tian, B. Assessment of Construction Workers’ Labor Intensity Based on Wearable Smartphone System. J. Constr. Eng. Manag. 2019, 145, 04019039. [Google Scholar] [CrossRef]
- Joshua, L.; Varghese, K. Automated recognition of construction labour activity using accelerometers in field situations. Int. J. Prod. Perform. Manag. 2014, 63, 841–862. [Google Scholar] [CrossRef]
- Khan, S.H.; Sohail, M. Activity monitoring of workers using single wearable inertial sensor. In Proceedings of the 2013 International Conference on Open Source Systems and Technologies, Lahore, Pakistan, 16–18 December 2013; pp. 60–67. [Google Scholar] [CrossRef]
- Ryu, J.; Seo, J.; Jebelli, H.; Lee, S. Automated Action Recognition Using an Accelerometer-Embedded Wristband-Type Activity Tracker. J. Constr. Eng. Manag. 2019, 145, 04018114. [Google Scholar] [CrossRef]
- Yang, K.; Aria, S.; Ahn, C.R.; Stentz, T.L. Automated Detection of Near-miss Fall Incidents in Iron Workers Using Inertial Measurement Units. In Proceedings of the Construction Research Congress 2014, Atlanta, GA, USA, 19–21 May 2014; American Society of Civil Engineers: Reston, VA, USA, 2014; pp. 935–944. [Google Scholar] [CrossRef]
- Jahanbanifar, S.; Akhavian, R. Evaluation of wearable sensors to quantify construction workers muscle force: An ergonomic analysis. In Proceedings of the 2018 Winter Simulation Conference (WSC), Gothenburg, Sweden, 9–12 December 2018; pp. 3921–3929. [Google Scholar] [CrossRef]
- Yan, X.; Li, H.; Li, A.R.; Zhang, H. Wearable IMU-based real-time motion warning system for construction workers’ musculoskeletal disorders prevention. Autom. Constr. 2017, 74, 2–11. [Google Scholar] [CrossRef]
- Awolusi, I.; Marks, E.; Hallowell, M. Wearable technology for personalized construction safety monitoring and trending: Review of applicable devices. Autom. Constr. 2018, 85, 96–106. [Google Scholar] [CrossRef]
- Nimbarte, A.D.; Aghazadeh, F.; Ikuma, L.H.; Harvey, C.M. Neck Disorders among Construction Workers: Understanding the Physical Loads on the Cervical Spine during Static Lifting Tasks. Ind. Health 2010, 48, 145–153. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Matsumura, Y.; Mitsukura, Y.; Fukumi, M.; Akamatsu, N.; Yamamoto, Y.; Nakaura, K. Recognition of EMG signal patterns by neural networks. In Proceedings of the 9th International Conference on Neural Information Processing (ICONIP ’02), Singapore, 18–22 November 2002; Volume 2, pp. 750–754. [Google Scholar] [CrossRef]
- Jebelli, H.; Lee, S. Feasibility of Wearable Electromyography (EMG) to Assess Construction Workers’ Muscle Fatigue. In Advances in Informatics and Computing in Civil and Construction Engineering; Springer International Publishing: Cham, Switzerland, 2019; pp. 181–187. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Load Constant (LC) | Horizontal Multiplier (HM) | Vertical Multiplier (VM) | Distance Multiplier (DM) | Asymmetric Multiplier (AM) | Frequency Multiplier (FM) | Coupling Multiplier (CM) |
|---|---|---|---|---|---|---|---|
| Metric | 23 kg | (25/H) | 1 − (0.003|V − 75|) | 0.82 + (4.5/D) | 1 − (0.0032A) | 1 | 2 |
| U.S. FPS | 51 lb | (10/H) | 1 − (0.0075|V − 30|) | 0.82 + (1.8/D) | 1 − (0.0032A) | 1 | 2 |
| Origin—Lifting the weight | H | V | D | A | C | F | Duration |
| 15″ | 14″ | 18″ | 0 | Good | 10/min | 1 h/day | |
| HM | VM | DM | AM | CM | FM | ||
| 0.67 | 0.88 | 0.92 | 1 | 1 | 0.45 | ||
| Destination—Placing the weight | H | V | D | A | C | F | Duration |
| 24″ | 32″ | 18″ | 0 | Good | 10/min | 1 h/day | |
| HM | VM | DM | AM | CM | FM | ||
| 0.42 | 0.99 | 0.92 | 1 | 1 | 0.45 |
| Experiments | Load (LBS) | H | RWL | LI | Risk |
|---|---|---|---|---|---|
| 1–9 | 10 | 15 | 12.40 | 0.8 | Nominal Risk |
| 10–19 | 15 | 15 | 12.40 | 1.2 | Nominal Risk |
| 20–29 | 20 | 15 | 12.40 | 1.6 | Increased Risk |
| 30–39 | 30 | 15 | 12.40 | 2.4 | Increased Risk |
| 40–49 | 35 | 15 | 12.40 | 2.8 | High Risk |
| 50–54 | 35 | 17 | 11.00 | 3.2 | High Risk |
| Time Segmentation | Decision Tree | SVM | KNN | Random Forest |
|---|---|---|---|---|
| 1-s (n = 425) | 99.05 | 97.17 | 99.05 | 97.07 |
| 0.5-s (n = 845) | 99.98 | 99.97 | 99.05 | 99.97 |
| 0.25-s (n = 1688) | 99.96 | 99.10 | 98.58 | 99.95 |
| Risk Class | 1-S Segmentation | 0.5-S Segmentation | 0.25-S Segmentation | ||||||
|---|---|---|---|---|---|---|---|---|---|
| NR | IR | HR | NR | IR | HR | NR | IR | HR | |
| Nominal Risk (NR) | 34 | 0 | 0 | 68 | 0 | 0 | 137 | 0 | 0 |
| Increased Risk (IR) | 0 | 21 | 1 | 0 | 42 | 1 | 0 | 80 | 1 |
| High Risk (HR) | 0 | 0 | 50 | 0 | 0 | 100 | 0 | 0 | 204 |
| Time Segmentation | KNN |
|---|---|
| 1-s (n = 425) | 97.16 |
| 0.5-s (n = 845) | 97.63 |
| 0.25-s (n = 1688) | 98.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mudiyanselage, S.E.; Nguyen, P.H.D.; Rajabi, M.S.; Akhavian, R. Automated Workers’ Ergonomic Risk Assessment in Manual Material Handling Using sEMG Wearable Sensors and Machine Learning. Electronics 2021, 10, 2558. https://doi.org/10.3390/electronics10202558
Mudiyanselage SE, Nguyen PHD, Rajabi MS, Akhavian R. Automated Workers’ Ergonomic Risk Assessment in Manual Material Handling Using sEMG Wearable Sensors and Machine Learning. Electronics. 2021; 10(20):2558. https://doi.org/10.3390/electronics10202558
Chicago/Turabian StyleMudiyanselage, Srimantha E., Phuong Hoang Dat Nguyen, Mohammad Sadra Rajabi, and Reza Akhavian. 2021. "Automated Workers’ Ergonomic Risk Assessment in Manual Material Handling Using sEMG Wearable Sensors and Machine Learning" Electronics 10, no. 20: 2558. https://doi.org/10.3390/electronics10202558
APA StyleMudiyanselage, S. E., Nguyen, P. H. D., Rajabi, M. S., & Akhavian, R. (2021). Automated Workers’ Ergonomic Risk Assessment in Manual Material Handling Using sEMG Wearable Sensors and Machine Learning. Electronics, 10(20), 2558. https://doi.org/10.3390/electronics10202558