1. Introduction
In the wake of a rapid increase in the number of automobiles, road traffic jams have become increasingly severe and have caused many troubles in our daily lives. The operating rules of the road traffic system and the reason for traffic jams should first be explored to reduce road traffic jams. We can then establish a more scientific traffic plan and improve the collaboration of traffic systems by using information technologies such as traffic communication, traffic computation and traffic control.
Many traffic models have been proposed from the micro or macro perspective to disclose the law of traffic jams. Generally, micro models chiefly focus on the kinetic behavior of a single vehicle, and macro models primarily study whole-road traffic properties. In terms of micro models, a famous model is the optimal velocity (OV) car-following model [
1]. The OV model can describe a real stop-and-go traffic jam with a differential dynamic function. It was extensively researched to uncover special traffic properties in many different road situations. Jiao et al. [
2] analyzed the safety and dynamic property of car-following behavior with collision sensitivity. Lee et al. [
3] studied car-following behavior for a road with multiple lanes by integrating a deep learning method. Tordeux et al. [
4] compared the traffic properties of car-following models with or without delayed information and explored the effect of reaction times on traffic stability. Treiber et al. [
5] compared the performance metrics of four numerical integration schemes for car-following models. Chen et al. [
6] investigated the influence of long-term and short-term driving characteristics on car-following behavior. Treiber et al. [
7] studied reaction times, estimation errors and anticipation effect in micro traffic models. From the perspective of macro traffic modeling, Payne [
8] proposed the famous density gradient model based on the car-following idea in 1971. After that, Aw et al. [
9] established the early velocity gradient model. In 1998, by latticing the space variable in macro traffic modeling, Nagatani constructed the first lattice hydrodynamic model [
10]. After the original density gradient model, the velocity gradient model and the lattice hydrodynamic model were proposed, many extended works have been carried out using these models. Some typical extended works, such as the model proposed by Khan et al. [
11], considered transition velocities, the extended speed gradient model with different kinds of vehicles [
12], the lattice hydrodynamic model with a consideration of traffic interruption [
13], etc. In addition, there are many other famous traffic models such as intelligent driver models [
14,
15,
16], cellular automaton models [
17,
18,
19], cell transmission models [
20,
21,
22], etc. They are also extensively used to describe many kinds of real traffic phenomena.
A traffic system operates cooperatively with many kinds of traffic information, particularly information acquired by vehicle-to-vehicle communication technology. When traffic information is changed, it is transformed and obtained by a target vehicle to adjust its motion. In this process, the motion state of the target vehicle cannot respond to the changed traffic information in a timely fashion, and delay is unavoidable. To uncover the impact of delay on traffic flow, Yu et al. [
23] studied the impact of headway and velocity on car-following traffic. Li et al. [
24] researched the impact of driver variables on delay using the car-following rule. Kang et al. [
25] investigated the influence of drivers’ physical delay with respect to relative flux on traffic stability. Zhang [
26] studied the influence of variable delay in sensing traffic density on traffic flow. This research shows that delay can lower traffic stability and cause traffic jams.
In the above research, the traffic models are continuous with respect to time. To investigate road traffic from the view of a time-discrete system, some research has been conducted using micro traffic modeling. In 2009, McCartney [
27] investigated a time-discrete car-following model, constructed based on a logistic map. Recently, Zhu et al. [
28] introduced a time-discrete car-following model by writing the continuous equation into a difference equation. In addition, cellular automaton models [
17,
18,
19] can be categorized as a kind of time-discrete traffic model. The traffic flow properties of cellular automaton models are simulated by the four rules of acceleration, deceleration, randomization and vehicle motion. Cellular automaton models are very convenient for simulation, but they cannot be analyzed mathematically.
Through the above literature analysis, it is clear that delay is inevitable in real traffic conditions, and research on traffic modeling and analysis from the time-discrete system is scarce. To explicitly reveal the variable delay on traffic flow from the perspective of the time-discrete system by macro traffic modeling and reducing the adverse impact of delay on traffic stability, a time-discrete lattice hydrodynamic traffic model with variable delay and a feedback control method is proposed and studied in the following sections.
The remainder of this paper is arranged as follows:
Section 2 introduces a new time-discrete traffic system;
Section 3 explores the stability property of the new model.
Section 4 covers simulation and analysis;
Section 5 summarizes the conclusion.
2. The Time-Discrete Traffic System
The hydrodynamic model constructed by Nagatani [
10] can be described as below:
where
and
, respectively, indicate the local density and local traffic flux of position
at time
,
represents the average value of road density,
is driver sensitivity,
represents the average headway and
,
is a function of density. The symbol
means the partial differential of a function for
. The function
is represented by Equation (2):
where
indicates maximum speed and
represents safety density.
By nondimensionalizing position variable
in Equation (1) (allow
and put it into Equation (1), hereafter
is also indicated as
), it has
Further, by latticing the space variable
, Nagatani [
10] gave the lattice version of Equation (3) as follows (it is also known as the lattice hydrodynamic model):
where
indicates lattice’s numerical order and
represents the lattice ahead of
.
For simplicity, let
, then Equation (4) can be reformed as:
From Equation (5), we see that the lattice hydrodynamic model is discrete with respect to space variables , but from the perspective of time variable , it is still continuous.
By discretizing time variable
in Equation (5) with forward difference, Equation (5) can be rewritten to the following spatio-temporal discrete model:
where
is the step.
In actual traffic, if the traffic information ahead is changed, the following vehicle will adjust its motion because of the changed preceding traffic condition. In this process, the following vehicle cannot respond to the changed traffic information in a timely manner and delay is unavoidable. Secondly, the change in traffic information is variable due to the varying road traffic conditions. Exploring the variable delay on traffic flow is more meaningful, so a time-discrete lattice hydrodynamic model with variable delay is constructed as follows:
where
is the variable delay and
, in which
and
are constant.
Generally, delay can reduce vehicle cooperation performance. To overcome this disadvantage, we can use intelligent transportation technologies such as vehicle-to-vehicle communication to obtain more information in a large range to adjust the cooperation of road traffic. For the convenience of controller design, a time-discrete feedback control signal is provided as follows:
where
indicates the feedback control parameter. The control signal is the flux difference between lattice
and lattices
and
, respectively.
and
are two weighting coefficients. As the flux information of lattice
is more important than lattice
for lattice
, the values of
and
are set as:
,
.
By combining Equations (7) and (8), the time-discrete traffic system with variable delay and feedback control signal of traffic flux is:
Further, Equation (9) can be abbreviated as:
3. System Stability Derivation
To obtain the stable condition of the new model with respect to variable delay and feedback control information, we suppose that all vehicles are running on a ring road, and the road is divided equally into
lattices. It is clear that the stable state of traffic flow is that the density and traffic flux of every lattice are the same as
and
. Thus, we denote the steady state of system (10) as
. Near the state of
, let
and
; then, the system of Equation (10) can be linearized into the following error dynamic system:
where
.
Further, let
,
, then Equation (11) can be changed into the matrix expression as:
where
is a matrix in which
for
,
for
,
and
for other cases,
is a matrix in which
for
,
and
for other cases,
is a matrix in which
for
,
,
and
for other cases.
It is noted that the stable point of the error dynamic system is zero. A condition that can ensure the error dynamic system (12) to be stable at zero can also guarantee the traffic system (10) to be stable at that state .
To prove the main result, some useful lemmas are needed.
Lemma 1. [
29].
For a time-discrete system, ,
in which represents the state vector. Let the stable point of the system be ,
if a positive definite function exists, ,
which satisfies for any and ;
then, the system is stable at stable point .
Lemma 2. [
29].
For a symmetric matrix ,
where ,
it has the following three equivalent propositions: - (1)
,
- (2)
, ,
- (3)
, ,
where means that all the eigenvalues of are negative.
The following theorem gives a condition that ensures that the error dynamic system (12) is stable at zero.
Theorem 1. For the error dynamic system of Equation (12) with given control parameters ,
and
,
if there exist matrices ,
,
,
,
and matrices ,
with appropriate dimension, such that the following linear matrix inequalities (13) and (14) hold:andwhereand is an identity matrix, then Equation (12) converges to its zero stable point.
Proof of Theorem 1. Let
, it has
. Then Equation (12) could be reformed as:
Let
, then
and
For the time-discrete system of Equation (15), we construct the following time-discrete Lyapunov function:
where
and
,
and
are three symmetric positive definite matrices.
It is obvious that . To ensure the error dynamic system (12) converges to its zero stable point, we only need to prove that by Lemma 1.
Taking the difference of
, it has:
For the function of
, one has:
Moreover, the difference of
is:
By combining Equations (19)–(21), we obtain:
On the other hand, for any matrices
,
with appropriate dimensions, the following equation is held by Equation (17):
For a symmetric matrix
with appropriate dimension, one has:
where
.
By adding Equations (23) and (24) to Equation (22), we obtain
where the symbols
,
,
,
,
,
,
are defined in Theorem 1 and
.
From Equation (25), a sufficient condition to guarantee
is
and
According to Lemma 2, Equations (26) and (27) are the same as the linear matrix inequalities of (13) and (14). As such, Theorem 1 is proven. □
4. Simulation and Discussion
To exhibit the impact of the variable delay and the feedback control signal on traffic flow, a numerical simulation of the system (12) is conducted. The simulation environment is a circular road and the road is evenly divided into lattices. The initial traffic condition is set to be stable but with a small perturbation as below: for , for , and for , where , , , , and means the initial six time steps. The other parameters are chosen as: , , , , .
The simulation results are shown in
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6 and
Figure 7.
Figure 1,
Figure 2,
Figure 3,
Figure 4 and
Figure 5 reveal the traffic flow developing process of the new model for different variable delay and feedback control gains.
Figure 6 shows the traffic wave sketch of lattice
in the evolution process from
to
time step corresponding to
Figure 1,
Figure 2,
Figure 3,
Figure 4 and
Figure 5.
Figure 7 further compares the traffic wave sketch of the new model with variable delay and constant delay.
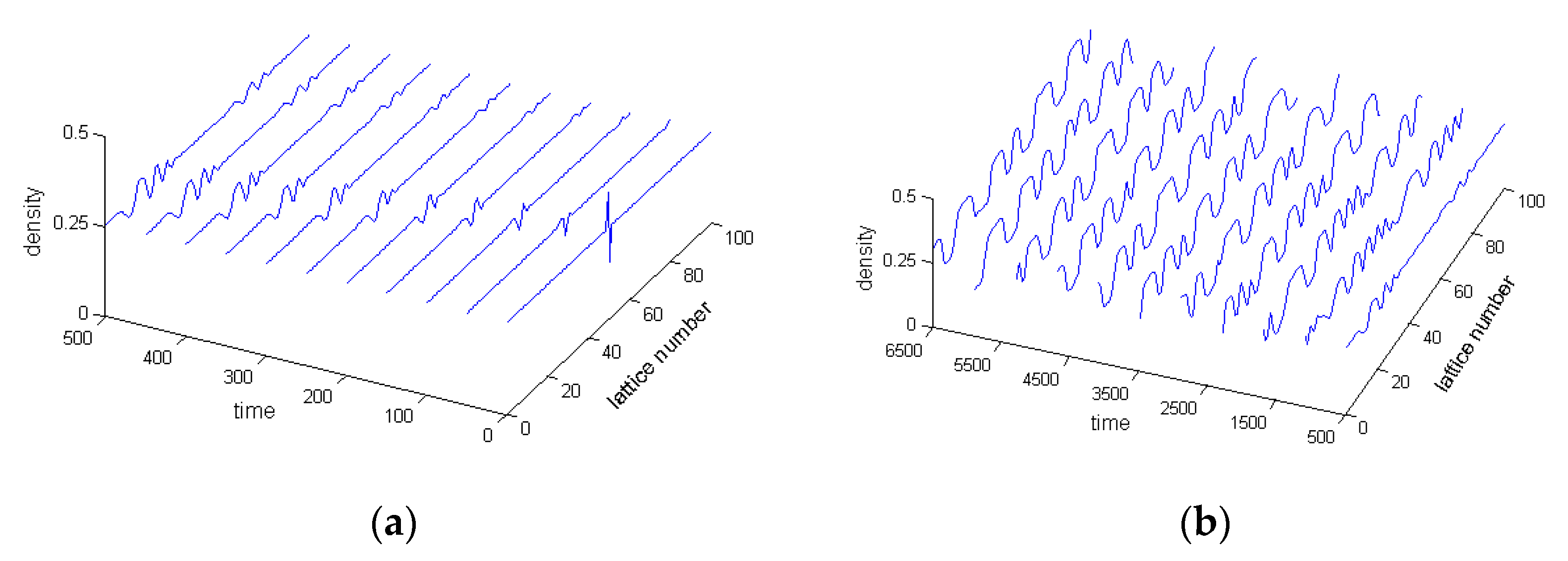
Figure 1 exhibits the traffic wave-developing process of the new model without variable delay and feedback control information.
Figure 1a is the traffic wave-developing pattern in the first
time step and
Figure 1b denotes the traffic wave-developing pattern after
time step. In
Figure 1, we can see that the perturbation will cause the initial stable traffic flow to become unstable. In a short simulation time, the traffic flow will evolve into a local perturbation, as shown in
Figure 1a. As time goes on, the whole traffic system will turn out to be unstable, as shown in
Figure 1b, and the unstable traffic flow is consistent with stop-and-go phenomena in real traffic situations.
Similarly,
Figure 2 and
Figure 3 show the traffic wave-developing process of the new model for different variable delays but without the feedback control. The variable delay in
Figure 2 is
and the variable delay in
Figure 3 is
, where
is the rounding function. It is clear that the interval of the variable delay in
Figure 2 is (1,3) and in
Figure 3 is (1,5). From
Figure 2 and
Figure 3, it is observed that the original traffic still becomes unstable under the perturbation. However, by comparing the scale of the oscillation of the traffic wave in
Figure 1 and
Figure 2, it is observed that the vibration level of unstable traffic in
Figure 2 is more severe than that in
Figure 1. This represents that the variable delay can lower the stable level of the traffic system and lead to a worse traffic jam. Further, from
Figure 2 and
Figure 3, it is found that the unstable situation of traffic flow becomes more serious when the interval of the variable delay is longer. From
Figure 1,
Figure 2 and
Figure 3, we can conclude that the traffic system is more likely to evolve into a traffic jam when variable delay is considered, and a longer interval of variable delay can cause greater traffic congestion.
Further,
Figure 4 and
Figure 5 show the traffic flow generation process of the new model when variable delay and feedback control are both taken into account. The variable delay in
Figure 4 and
Figure 5 is
, and the feedback control gain in
Figure 4 is
and in
Figure 5 is
. In
Figure 4, the fluctuation in traffic still appears, but the amplitude of the traffic wave is smaller than that in
Figure 3. Additionally, when
increased to
, it can be seen in
Figure 5 that the initial disturbance disappears in the traffic evolution process, and the traffic jam has been suppressed. This makes clear that the feedback control information of flux difference of the target lattice and its two preceding lattices can elevate traffic stability, and a more significant feedback control gain can ensure a more stable degree of traffic.
Corresponding to
Figure 1,
Figure 2,
Figure 3,
Figure 4 and
Figure 5,
Figure 6 shows the traffic wave sketch of lattice
from
to
time step, in which
Figure 6a corresponds to
and
,
Figure 6b corresponds to
and
,
Figure 6c corresponds to
and
,
Figure 6d corresponds to
and
and
Figure 6e corresponds to
and
, respectively.
Figure 6 shows that the range of the traffic wave is enlarged when the variable delay is taken into account and further enlarged when the interval of the variable delay is increased. Moreover, the seriousness of the traffic jam has been reduced gradually when the feedback control information is considered, and the stabilizing effect on traffic flow for a bigger feedback control weighting coefficient is much more obvious.
Further,
Figure 7 compares the traffic wave evolution sketch of the model with variable delay and constant delay. The density wave sketches are obtained for lattice
from
to
when control gain
is set as
.
Figure 7a shows the result when variable delay is considered, and the variable delay is
.
Figure 7b,c corresponds to the traffic wave sketch when
is set as constant delays of
and
. It is clear that
and
are the constant upper bound and lower bound of variable delay
. From
Figure 7, it is observed that the traffic flow finally turns out to be unstable. The scale of the unstable density wave in
Figure 7a is also between the density wave scales in
Figure 7b,c. This represents that the unstable level of traffic flow caused by the variable delay is stronger than the fluctuation degree of traffic flow caused by the constant upper bound of the variable delay. Nonetheless, it is weaker than the fluctuation level in traffic flow caused by the constant lower bound of the variable delay.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}