
Optimization of Energy Consumption Based on Traffic Light Constraints and Dynamic Programming


Abstract
:1. Introduction
- The speed constraints at discrete moments are used to realize an arbitrary dynamic process, which simplifies the complexity of modeling and provides a larger space for the subsequent energy management optimization to find the optimal control solution;
- The optimization problem is constructed by the combining traffic light model and an energy management strategy. The vehicle’s economy is improved under the premise of passing on a green light;
- A multisignal, multiscenario passing task with random initial phase is constructed to validate the DP-based energy management strategy.
2. Vehicle Model
2.1. Vehicle Parameters
2.2. Vehicle Dynamic Model
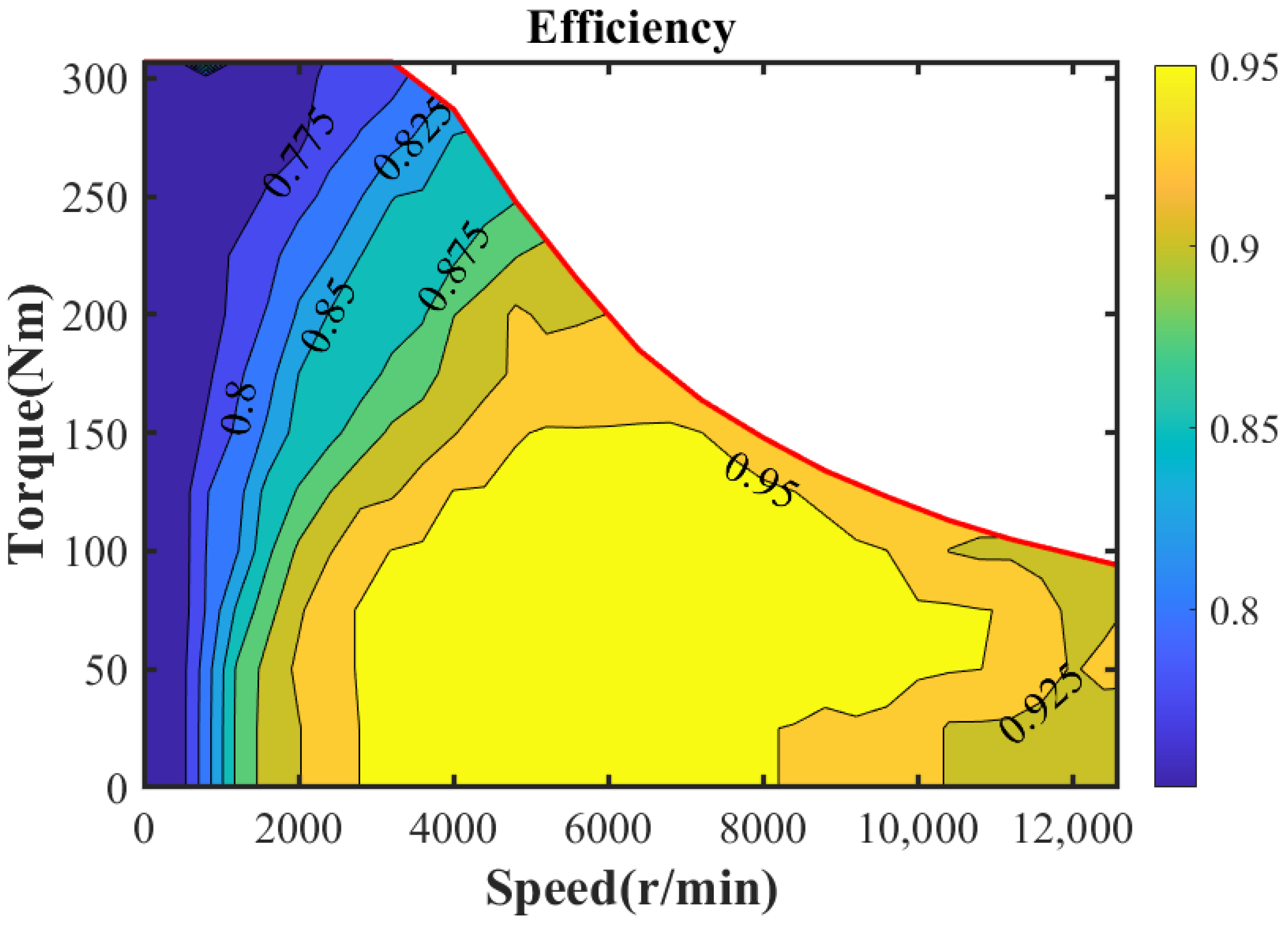
2.3. Motor Model
2.4. Battery Model
3. Traffic Light Model
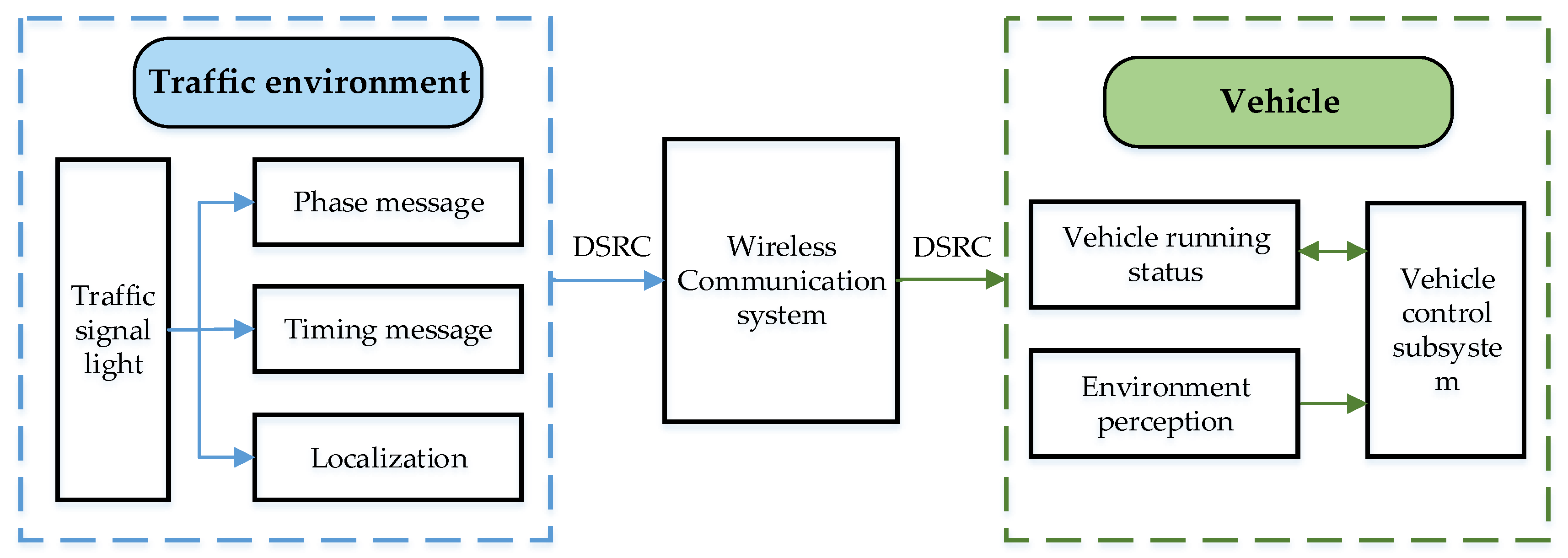
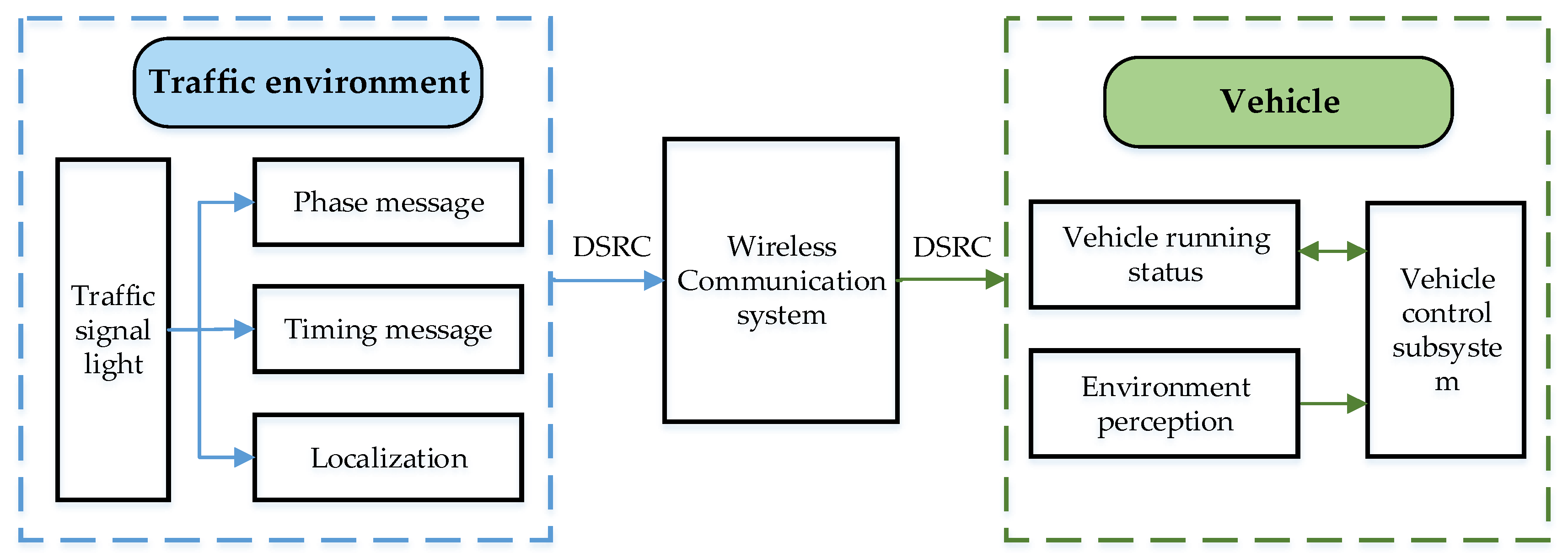
3.1. Vehicle–Road Collaborative System
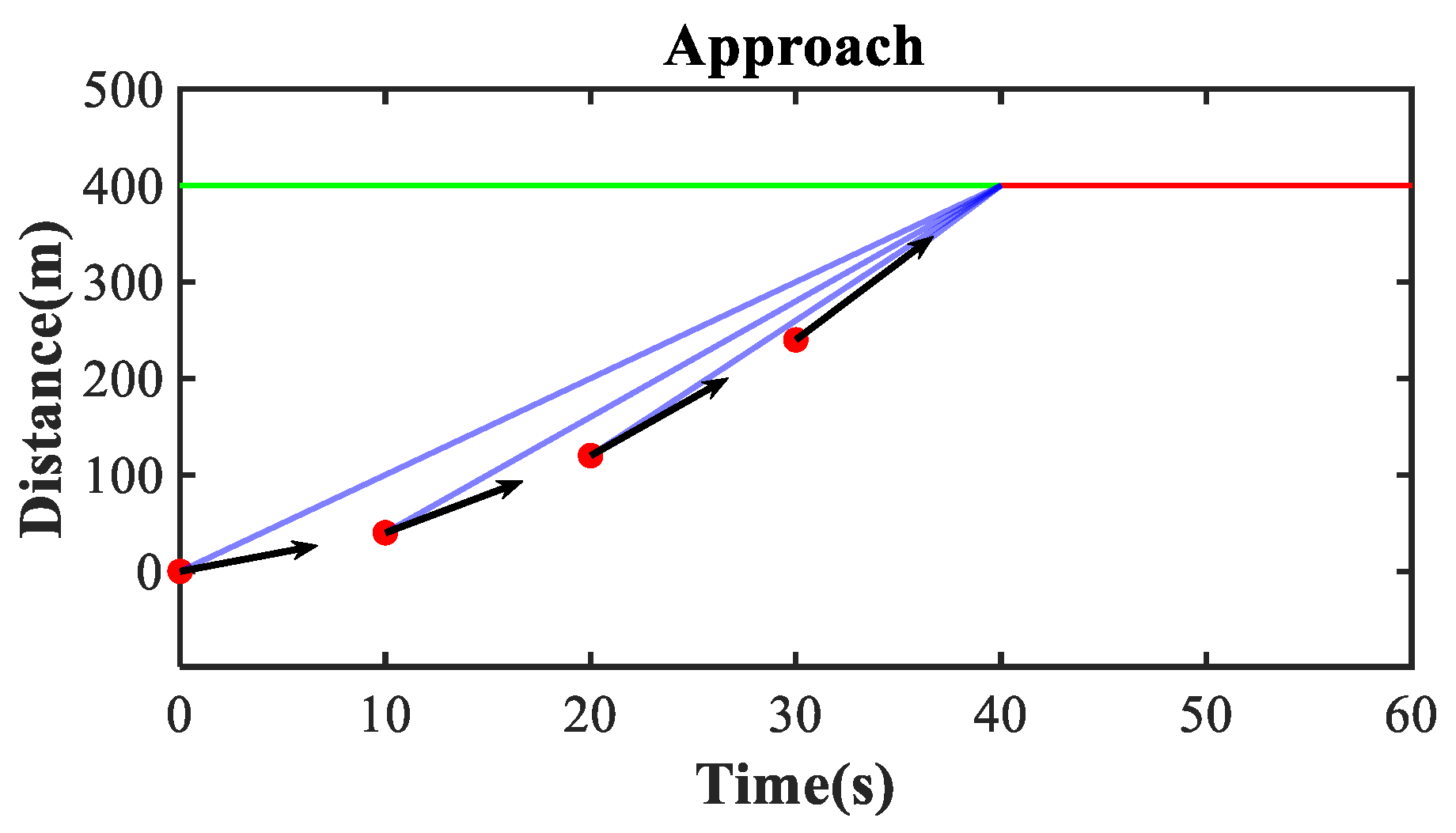
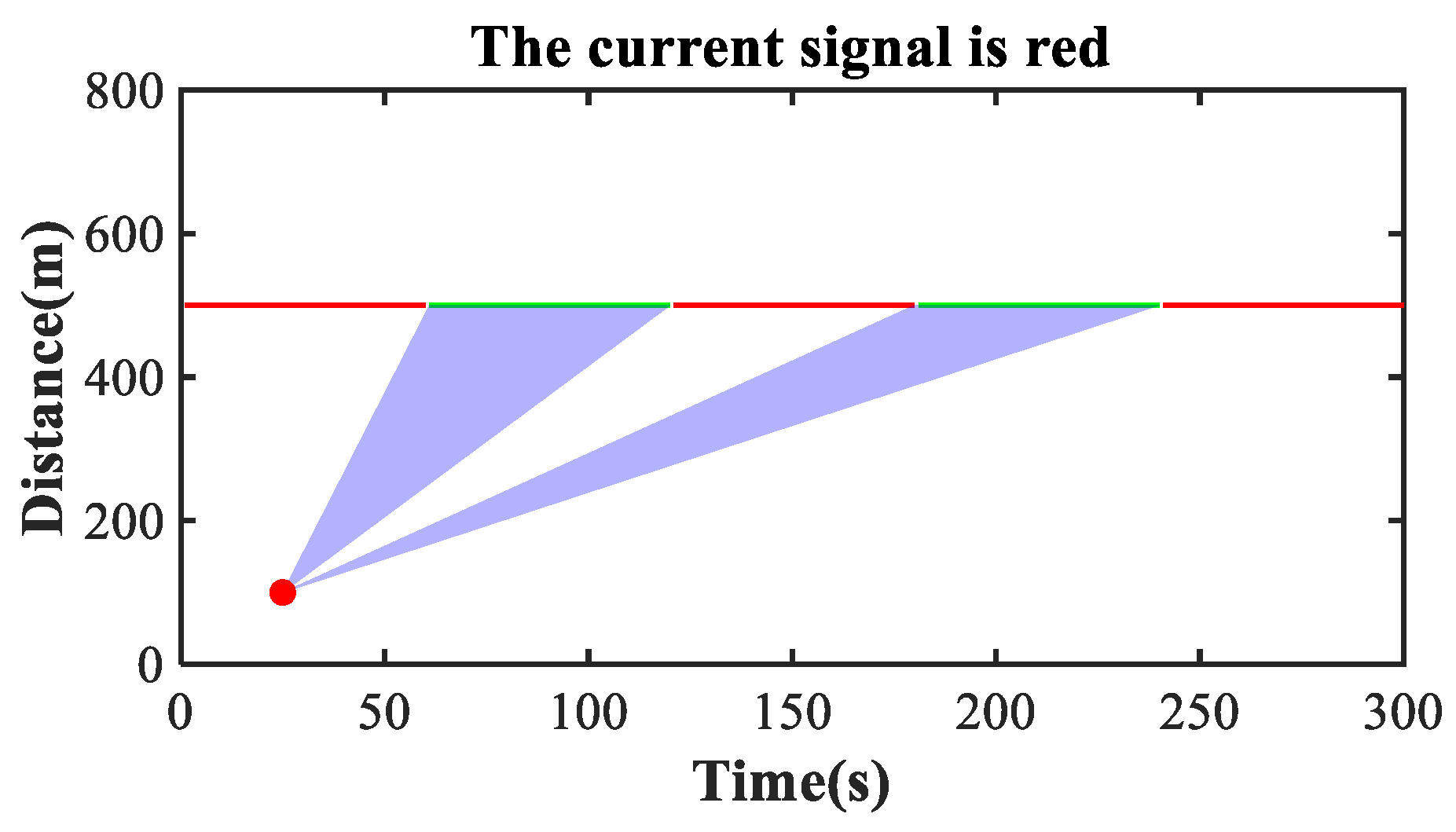
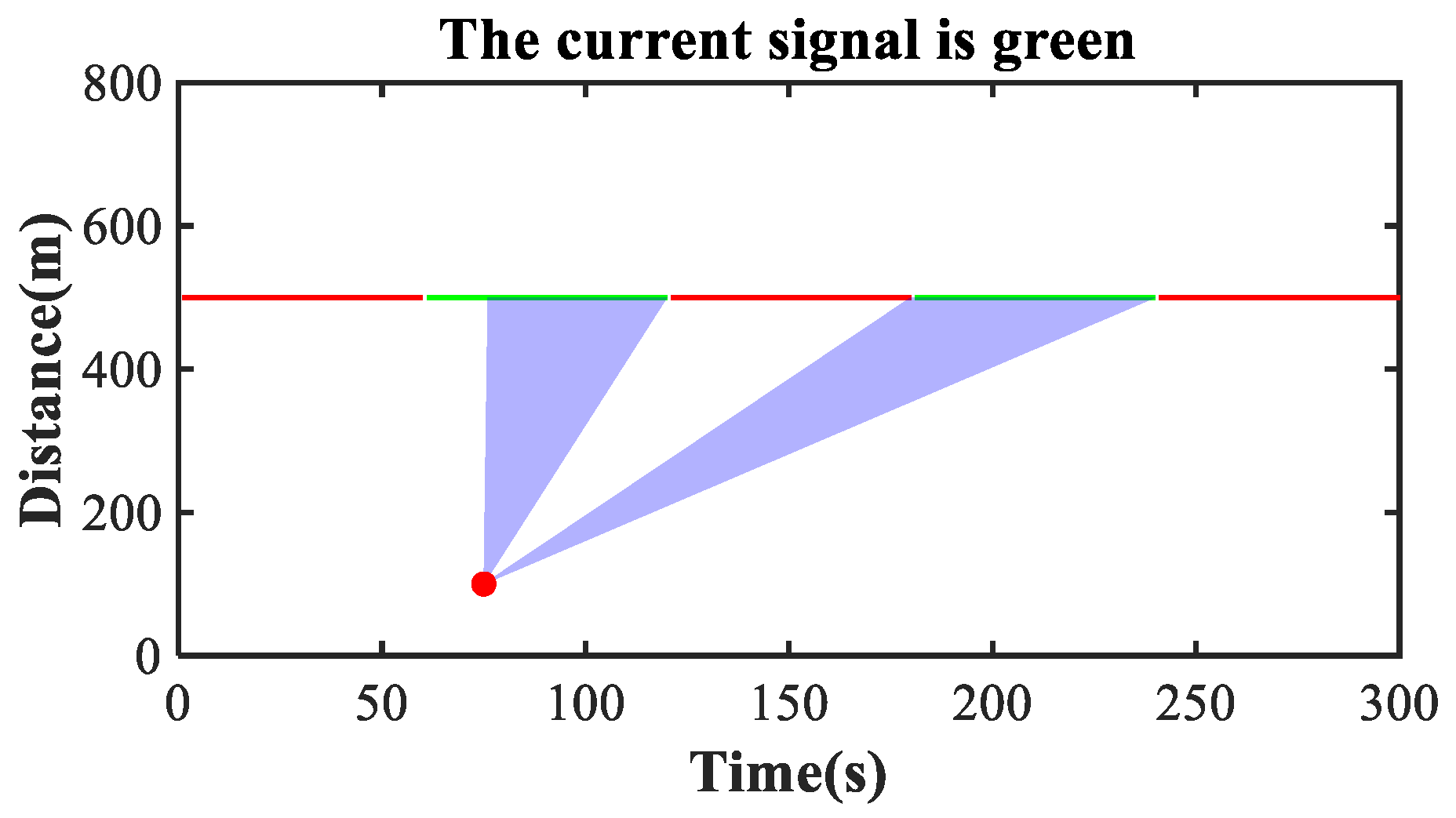
3.2. Traffic Constraints
- The time of communication transmission is ignored when the traffic information is transmitted between vehicle end and road end.
- Assume that the vehicle always drives along a straight line, ignoring steering driving conditions.
- After interference from other vehicles, this is equivalent to re-specifying the initial vehicle state and solving a new optimization problem for the instantaneous-optimization-based energy management strategy. This paper studies a complete optimization process, assuming that the vehicle is not affected by other vehicles.
- Simplify the red-green-yellow signal to red-green signal for partial security assumption. The color of the traffic light is considered to be red during the period of yellow.
- The input information of the traffic light model should be consistent with the data that can be provided by the cooperative vehicle infrastructure system.
- The proposed model should be applicable to traffic lights with different phases and different distances.
- The traffic light model should give an indicator which provides constraints for subsequent energy management optimization.
- Control actions should be implemented by energy management strategies rather than the traffic light model.
4. Energy Management Strategy Combined with Traffic Light Model
4.1. Dynamic Programming Fundamentals
- Determine the stage of the optimization problem. Decompose a global optimization problem into several stages of subproblems to be solved. The amount of stages in the solution process is denoted as .
- Determine state variables and control variables for the optimization problem. The state of the system at each stage is described by the state variables. The state variable at stage is denoted as . The decision that acts on the control system to change the system state is described by the control variable. The control variables when the system state is are denoted as . In the global optimization problem with stages, there are state variables and control variables.
- Determine the constraints of the optimization problem. The state variables and control variables of the system often have various constraints, including linear and nonlinear constraints, equation constraints and inequality constraints. Therefore, in the algorithm solution process, the state and control variables must satisfy the constraints of the optimization problem. The optimal control sequence under the global is solved within the allowed range to complete the optimal control of the system.
- Determine the state transfer equation of the optimization problem. The state transfer equation describes the law of the system changing from the state of the current stage to the state of the next stage. By determining the state variables and control variables of the current stage, the state variables of the next stage can be obtained to realize the transfer of the system state.
- Determine the cost function of the optimization problem. The cost function is used to measure the impact of the control system on the system performance in a certain state. The function depends on the current state variables and control variables. At the stage, when the system state variable is and the control variable is , the cost function is denoted as .
4.2. Global Optimized Energy Management Strategy
- In this paper, the optimization task is described in terms of driving distance. When the vehicle travels to the target distance, it represents the completion of the whole optimization task. Set the distance interval as 1 m, i.e., . The ratio of the target distance to the distance interval is taken as the stage of the optimization problem. The stage is calculated as described in the following equation:where is the target distance of the task and N is the stage of the optimization problem.
- The vehicle speed and travel time are used as state variables. The motor compensation load rate is used as the control variable.where is the state variable and is the control variable.
- The equation constraint is mainly determined by the vehicle dynamics. That is, the EV is abstracted into a mathematical model and transformed into a mathematical expression. In the driving process, from the perspective of the power balance, the required power is equal to the power generated by overcoming the driving resistance, as described in Equation (19). The power of the motor should be equal to the demanded power of the whole vehicle, as described in Equation (20).where is power of the motor. The inequality constraint mainly constrains the vehicle components, state variables and control variable. The speed and torque of the motor should be within the range that the motor can provide. The vehicle reversing situation is not considered in this paper, so the vehicle speed should be kept non-negative. In addition, urban roads usually have limits on vehicle speed, so the speed should also be constrained to the traffic regulation. The travel time should be greater than zero and ensure a strict monotonic increment. The absolute value of and the actual load rate of the motor should not be greater than 1. The overall inequality constraint is described in the following equation:where is the number of stages, and are the minimum and maximum speed of the motor, respectively, is the maximum speed of the city road limited by traffic rules which is adopted 80 km/h in this paper and is the driver-controlled motor load rate.
- Since time is a state variable in this optimization problem and the stage belongs to the spatial domain, it is necessary to use the expression for the spatial domain when the state transfer equation is involved, as described in the following equation:where is the current stage, is the vehicle speed and is the vehicle acceleration. Combining the previous Equation (1), the speed update formula is calculated as described in the following equation:The time update formula is calculated as described in the following equation:
- In this paper, the cost function of the optimization problem is designed by considering the road speed limit and the motor operating point efficiency, as shown in the following equation:where and are the coefficients, is the penalty function of speed and is the efficiency of the motor. This function allows the vehicle speed to temporarily deviate from the speed constraints of the traffic light model. However, the speed deviation penalty is increased when the vehicle approaches the next traffic light. The complete DP-based global optimal energy management strategy is thus constructed.
5. Results
5.1. Build Optimization Task
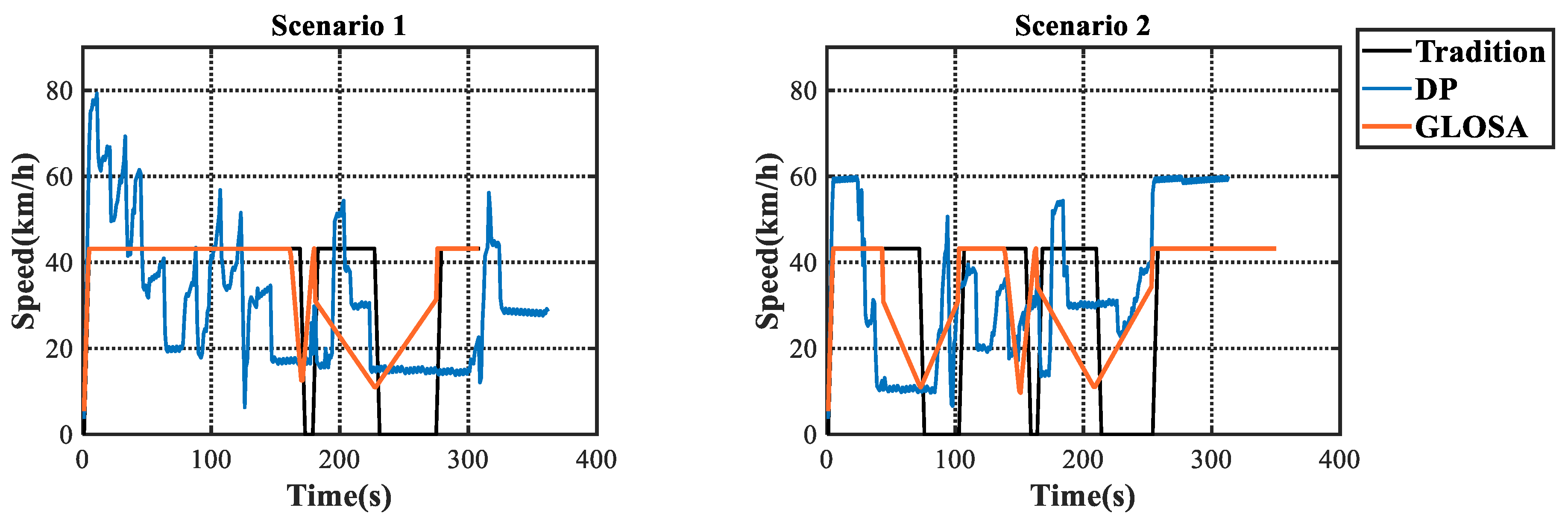
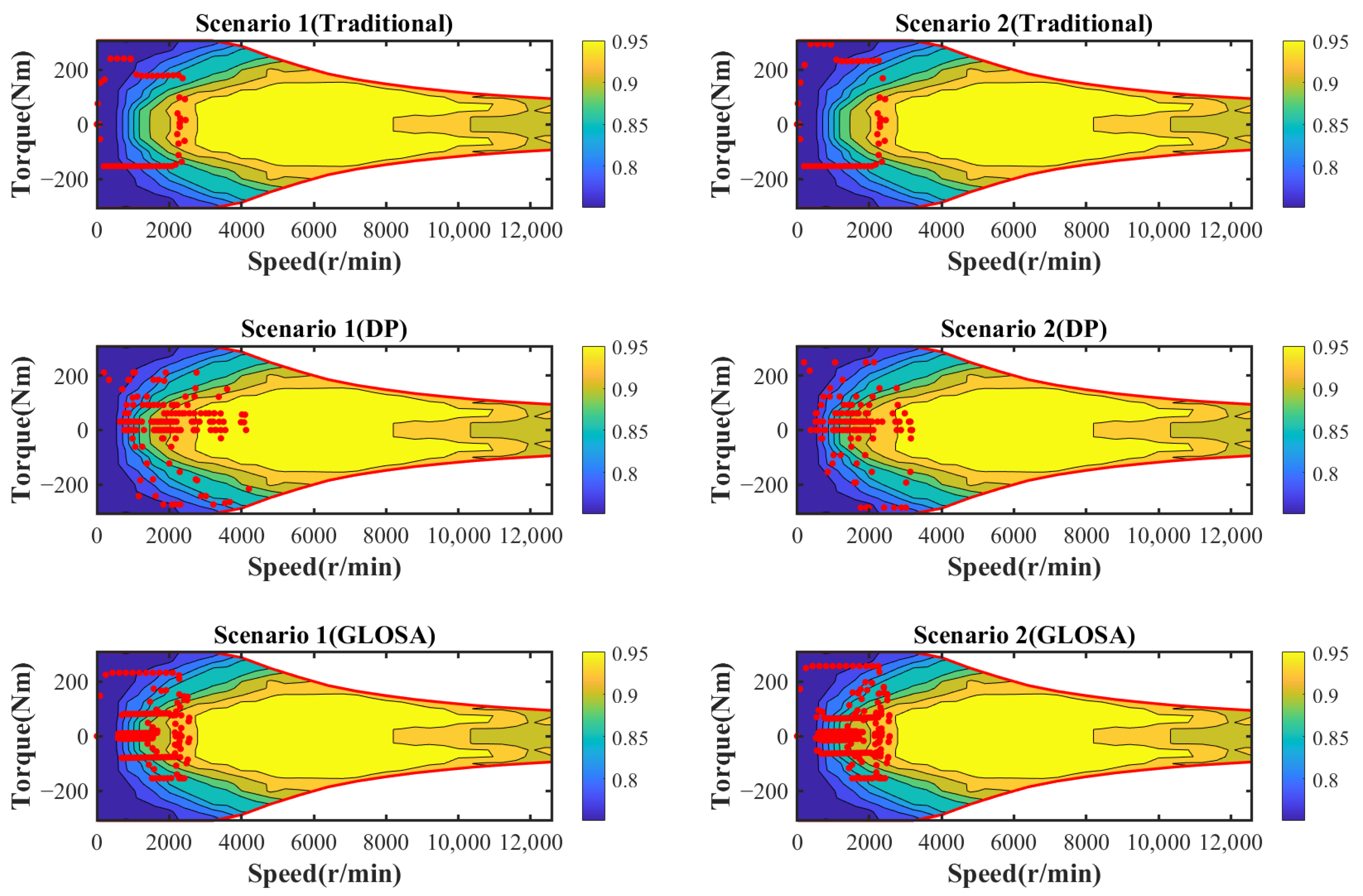
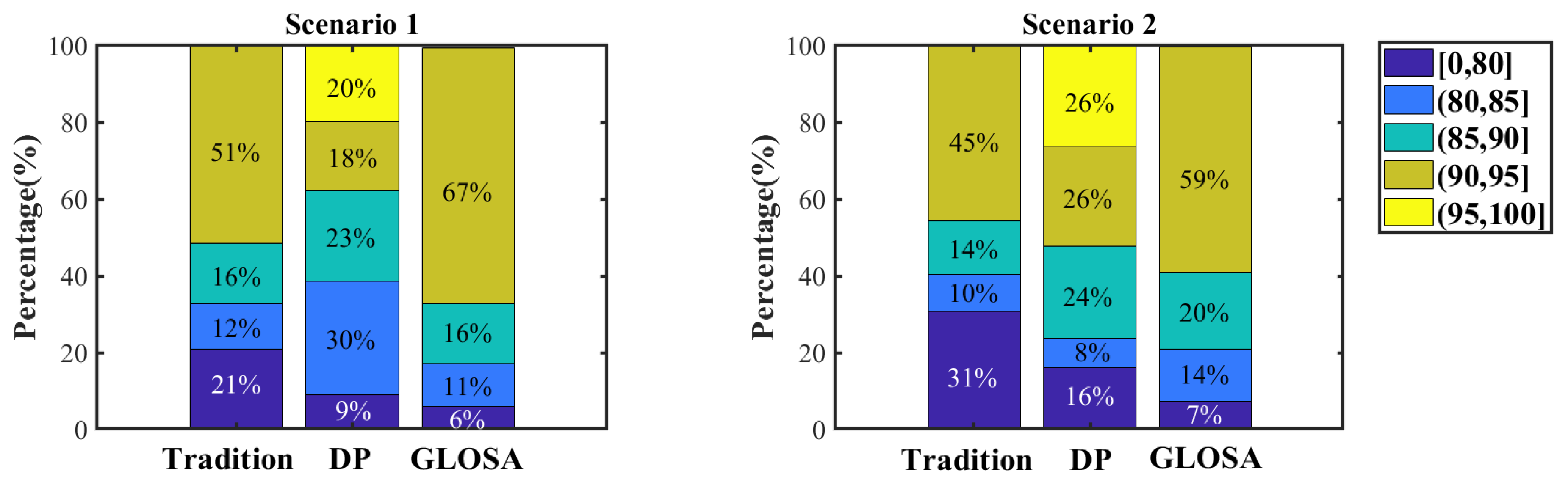
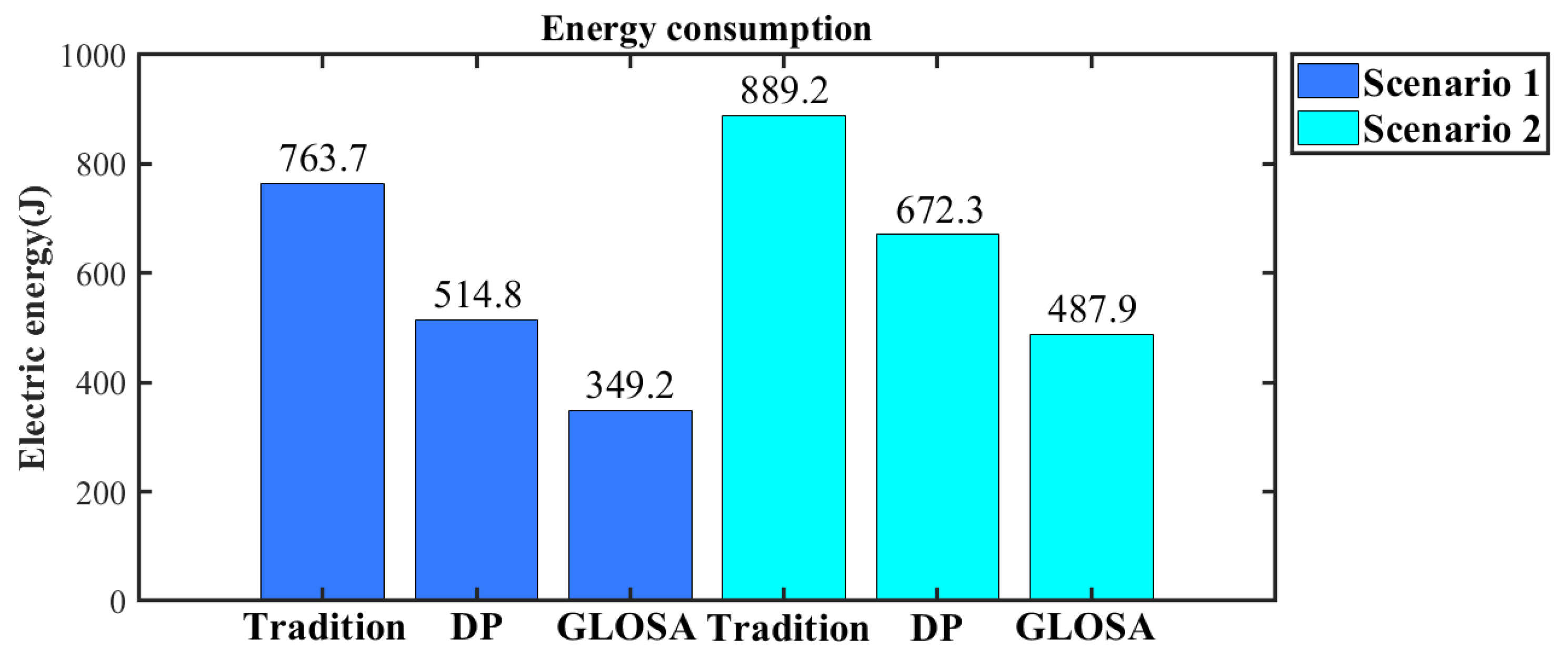
5.2. Simulation Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alturiman, A.; Alsabaan, M. Impact of Two-Way Communication of Traffic Light Signal-to-Vehicle on the Electric Vehicle State of Charge. IEEE Access 2019, 7, 8570–8581. [Google Scholar] [CrossRef]
- Protschky, V.; Feld, S.; Walischmiller, M. Traffic Signal Adaptive Routing. In Proceedings of the 18th International Conference on Intelligent Transportation Systems, Las Palmas de Gran Canaria, Spain, 15–18 September 2015; pp. 450–456. [Google Scholar]
- Mo, Y.H.; Zhang, P.L.; Chen, Z.J.; Ran, B. A Method of Vehicle-Infrastructure Cooperative Perception Based Vehicle State Information Fusion Using Improved Kalman Filter. Multimed. Tools. Appl. 2021, 18, 8199361. [Google Scholar] [CrossRef]
- Wan, K.J.; Jeon, H.M.; Kim, S. Intelligent Wave/Dsrc Platform Technology for Efficient Data Transmission in Vehicle Communication. J. Korea Multimed. Soc. 2017, 20, 1519–1526. [Google Scholar]
- Chen, S.Z.; Hu, J.L.; Shi, Y.; Zhao, L. LTE-V: A Td-Lte-Based V2x Solution for Future Vehicular Network. IEEE Internet. Things 2016, 3, 997–1005. [Google Scholar] [CrossRef]
- Skondras, E.; Michalas, A.; Vergados, D.D. A Survey on Medium Access Control Schemes for 5G Vehicular Cloud Computing Systems. In Proceedings of the 2018 Global Information Infrastructure and Networking Symposium, Thessaloniki, Greece, 23–25 October 2018. [Google Scholar]
- Li, J.; Dong, Y. A New Night Traffic Light Recognition Method. In Proceedings of the 2018 International Seminar on Computer Science and Engineering Technology, Shanghai, China, 17–18 December 2019. [Google Scholar]
- Wang, J.G.; Zhou, L.B. Traffic Light Recognition with High Dynamic Range Imaging and Deep Learning. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1341–1352. [Google Scholar] [CrossRef]
- Kim, H.K.; Yoo, K.Y.; Park, J.H.; Jung, H.Y. Traffic Light Recognition Based on Binary Semantic Segmentation Network. Sensors 2019, 19, 1700. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, P.; Yan, F.W.; Du, C.Q. A Comprehensive Analysis of Energy Management Strategies for Hybrid Electric Vehicles Based on Bibliometrics. Renew. Sustain. Energy Rev. 2015, 48, 88–104. [Google Scholar] [CrossRef]
- Kim, M.; Jung, D.; Min, K. Hybrid Thermostat Strategy for Enhancing Fuel Economy of Series Hybrid Intracity Bus. IEEE Trans. Veh. Technol. 2014, 63, 3569–3579. [Google Scholar] [CrossRef]
- Jeoung, H.; Lee, K.; Kim, N. Methodology for Finding Maximum Performance and Improvement Possibility of Rule-Based Control for Parallel Type-2 Hybrid Electric Vehicles. Energies 2019, 12, 1924. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.Z.; Zhang, B.Z.; Liang, H.Y. Global Optimal Control Strategy of PHEV Based on Dynamic Programming. In Proceedings of the 6th International Conference on Information Science and Control Engineering, Shanghai, China, 20–22 December 2019; pp. 758–762. [Google Scholar]
- Hu, P.; Huang, C.; Lian, J. Efficient Dynamic Programming in Economical Cruise Control under Real-Time Traffic Situations. Trans. Inst. Meas. Control 2020, 42, 2044–2056. [Google Scholar] [CrossRef]
- Rezaei, A.; Burl, J.B.; Zhou, B.; Rezaei, M. A New Real-Time Optimal Energy Management Strategy for Parallel Hybrid Electric Vehicles. IEEE Trans. Contr. Syst. Technol. 2019, 27, 830–837. [Google Scholar] [CrossRef]
- Keller, M.; Schmitt, L.; Abel, D. Nonlinear Hierarchical Model Predictive Control for the Energy Management of a Hybrid Electric Vehicle. In Proceedings of the 27th Mediterranean Conference on Control and Automation, Akko, Israel, 1–4 July 2019; pp. 451–457. [Google Scholar]
- Altan, O.D.; Wu, G.; Barth, M.J.; Boriboonsomsin, K.; Stark, J.A. Glidepath: Eco-Friendly Automated Approach and Departure at Signalized Intersections. IEEE Trans. Intell. Veh. 2017, 2, 266–277. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Barth, M.J. Cooperative Eco-Driving at Signalized Intersections in a Partially Connected and Automated Vehicle Environment. IEEE Trans. Intell. Transp. 2019, 21, 2029–2038. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.W.; Fu, R.; Guo, Y.S.; Xin, Q.; Shi, Z.K. Consensus and Optimal Speed Advisory Model for Mixed Traffic at an Isolated Signalized Intersection. Phys. A 2019, 531, 1–22. [Google Scholar] [CrossRef]
- Suzuki, H.; Marumo, Y. A New Approach to Green Light Optimal Speed Advisory (GLOSA) Systems for High-Density Traffic Flow. In Proceeding of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018; pp. 362–367. [Google Scholar]
- Luo, Z.; Li, Y.; Zhang, X.; Wang, K. Vector control implementation in field programmable gate array for 200 kHz GaN-based motor drive systems. J. Eng. 2018, 13, 650–653. [Google Scholar] [CrossRef]
- Park, C.H.; Eui, Y.G. Development and Performance of BMS Modules for Urban Electric Car Using Life Prediction Method. Trans. KSAE 2013, 21, 147–154. [Google Scholar]
- Kang, G. A Law and Policy Study on Tuning of Automotive Electronic Control Units(ECU). Han Yang Law Rev. 2020, 3, 145–168. [Google Scholar] [CrossRef]
- Blekhman, I.; Kremer, E. Vertical-longitudinal dynamics of vehicle on road with unevenness. In Proceedings of the 10th International Conference on Structural Dynamics, Rome, Italy, 10–13 September 2017; pp. 3278–3283. [Google Scholar]
- Liu, Z.X.; Wang, Z.; Bai, X.P.; Gao, L. Linearized Longitudinal Dynamic Model for Tractor Cruise Control System. In Proceedings of the 10th International Conference on Computer Modelling and Simulation, Sydney, Australia, 8–10 January 2018; pp. 221–227. [Google Scholar]
- Huang, K.F.; Wang, Y.; Feng, J.Q. Research on Equivalent Circuit Model of Lithium-ion Battery for Electric Vehicles. In Proceedings of the 3rd World Conference on Mechanical Engineering and Intelligent Manufacturing, Shanghai, China, 4–6 December 2020; pp. 492–496. [Google Scholar]
- Kim, T.; Qiao, W. A Hybrid Battery Model Capable of Capturing Dynamic Circuit Characteristics and Nonlinear Capacity Effects. IEEE Trans. Energy Conver. 2011, 26, 1172–1180. [Google Scholar] [CrossRef] [Green Version]
- Ndashimye, E.; Ray, S.K.; Sarkar, N.I.; Gutierrez, J.A. Vehicle-to-Infrastructure Communication over Multi-Tier Heterogeneous Networks: A Survey. Comput. Netw. 2017, 112, 144–166. [Google Scholar] [CrossRef]
- Topaloglu, H.; Kunnumkal, S. Approximate dynamic programming methods for an inventory allocation problem under uncertainty. Nav. Res. Logist. 2006, 8, 822–841. [Google Scholar] [CrossRef] [Green Version]
- Fan, J.J.; Guo, J.Y.; Wang, L.; Zhu, J.P.; Zhang, X.F. Dynamic Programming Algorithm for Hybrid Powertrain Power Allocation. In Proceedings of the 38th Chinese Control Conference, Guangzhou, China, 27–30 July 2019; pp. 6674–6679. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value | Unit |
|---|---|---|---|
| Vehicle | Vehicle weight | 1200 | kg |
| Tire radius | 0.3 | m | |
| Frontal area | 3 | m2 | |
| Drag coefficient | 0.4 | / | |
| Final drive ratio | 6 | / | |
| Motor | Maximum torque | 307 | Nm |
| Maximum power | 126 | kW | |
| Rated power | 60 | kW | |
| Maximum RPM | 12,584 | r/min | |
| Inertia | 0.1 | kg·m2 | |
| Battery | Rated capacity | 24 | kWh |
| Rated voltage | 366 | V |
| Number | D1 | D2 | D3 | D4 | D5 |
|---|---|---|---|---|---|
| Distance (m) | 492 | 836 | 1472 | 2039 | 2604 |
| Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Scenario 1 | 55 s (green) | 43 s (red) | 50 s (green) | 57 s (red) | 33 s (red) |
| Scenario 2 | 44 s (green) | 41 s (green) | 42 s (red) | 12 s (red) | 16 s (red) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, J.; Chu, L.; Guo, C. Optimization of Energy Consumption Based on Traffic Light Constraints and Dynamic Programming. Electronics 2021, 10, 2295. https://doi.org/10.3390/electronics10182295
Xing J, Chu L, Guo C. Optimization of Energy Consumption Based on Traffic Light Constraints and Dynamic Programming. Electronics. 2021; 10(18):2295. https://doi.org/10.3390/electronics10182295
Chicago/Turabian StyleXing, Jiaming, Liang Chu, and Chong Guo. 2021. "Optimization of Energy Consumption Based on Traffic Light Constraints and Dynamic Programming" Electronics 10, no. 18: 2295. https://doi.org/10.3390/electronics10182295
APA StyleXing, J., Chu, L., & Guo, C. (2021). Optimization of Energy Consumption Based on Traffic Light Constraints and Dynamic Programming. Electronics, 10(18), 2295. https://doi.org/10.3390/electronics10182295