
Analysis of Singular Configuration of Robotic Manipulators



Abstract
:1. Introduction
2. Related Work
3. A Novel Singularity Identification Method
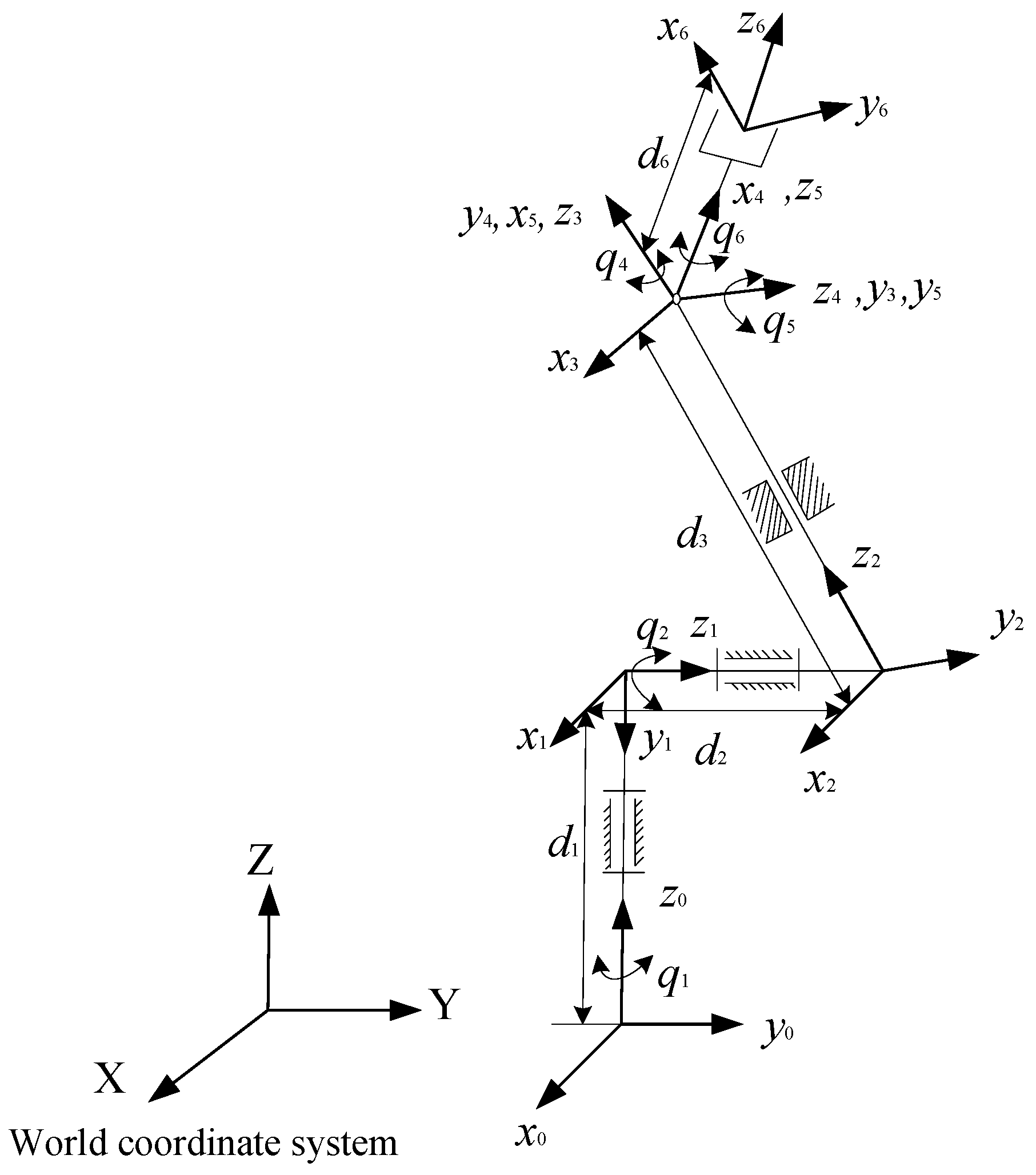
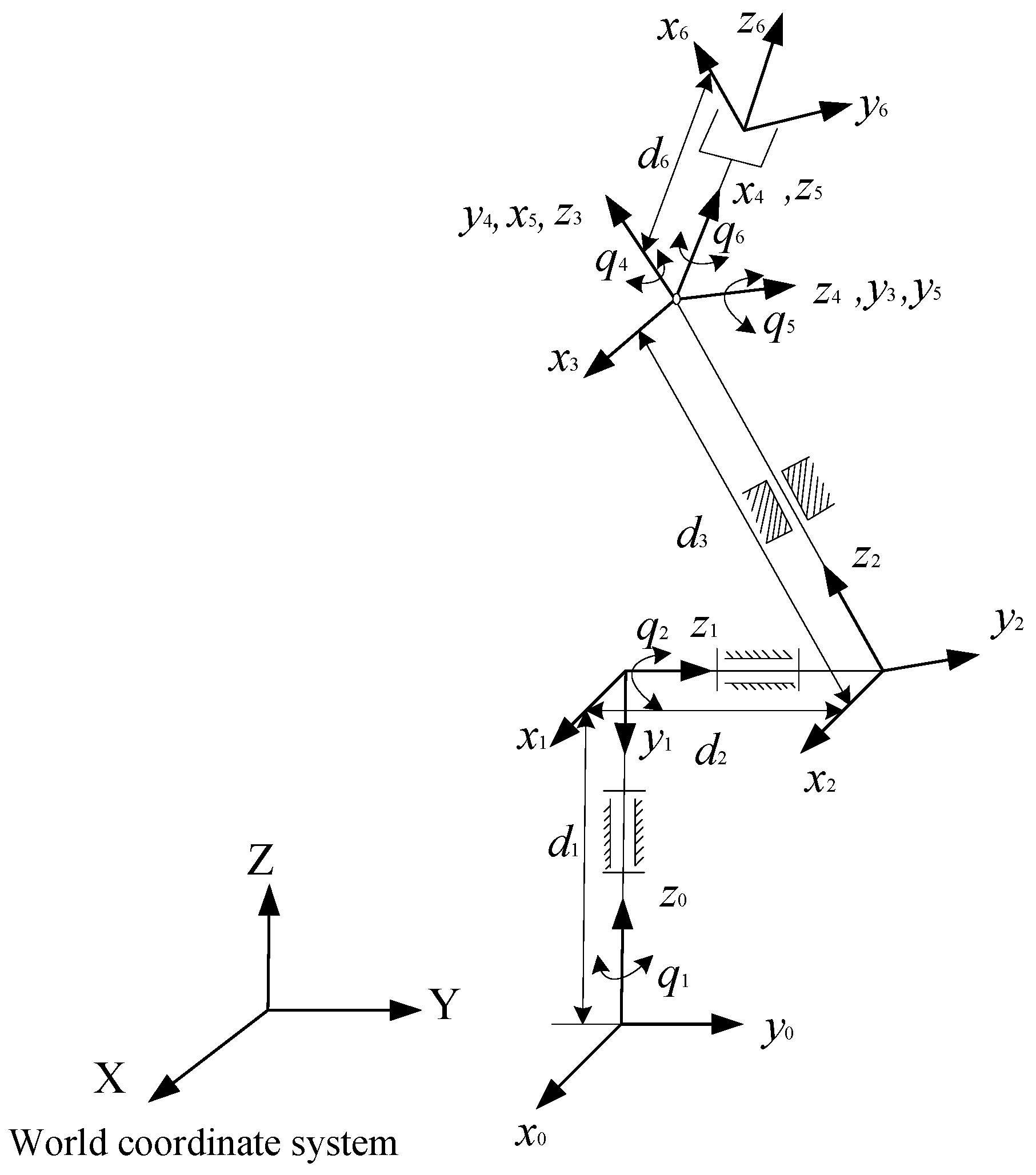
3.1. Determining Singular Configurations of a Stanford Manipulator through an Analytical Method
3.2. A Singular Configuration Identification Method Based on Joint Angle Parameterization
- (1)
- A group of joint positions to be applied in the subsequent steps are arbitrarily chosen to satisfy ;
- (2)
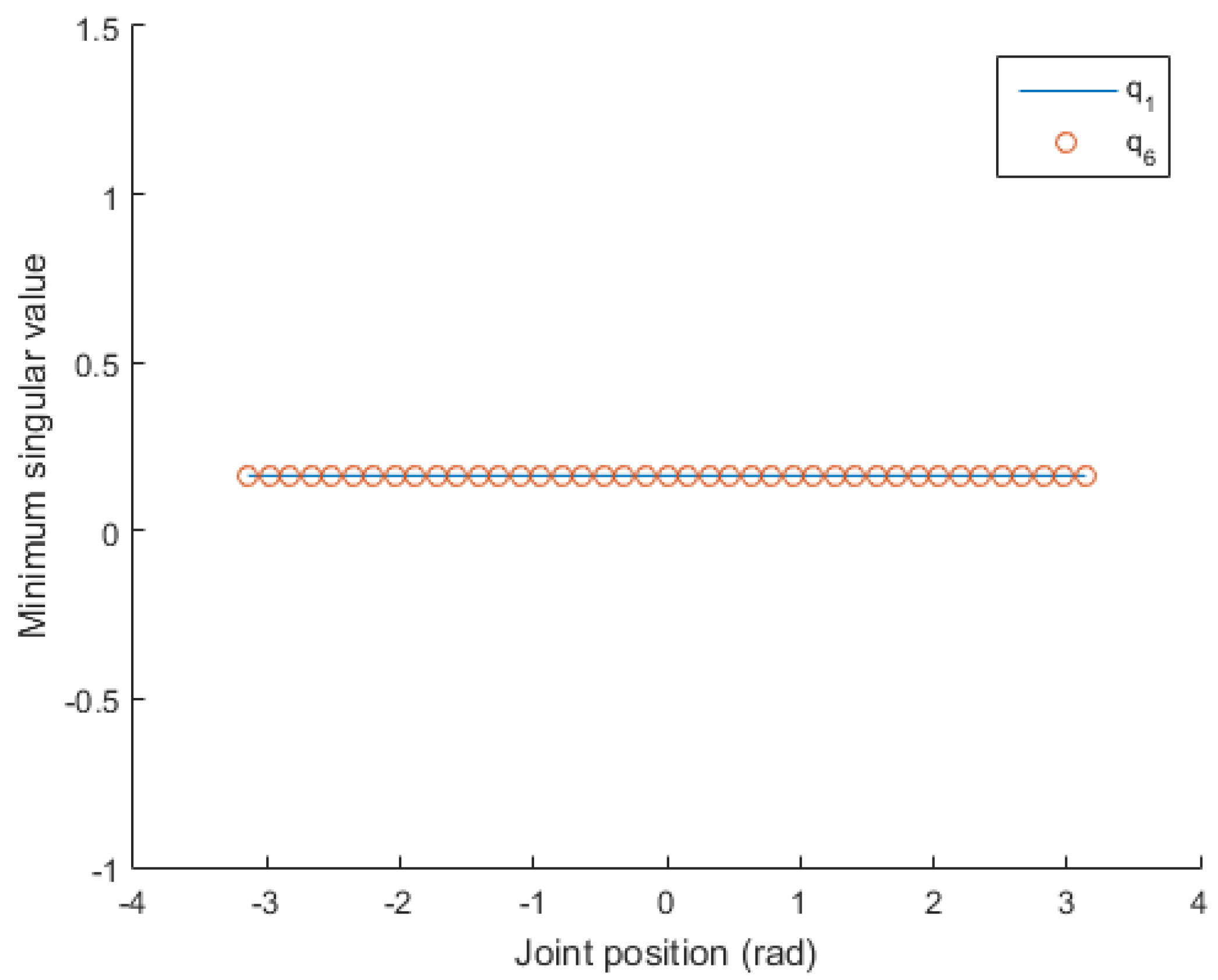
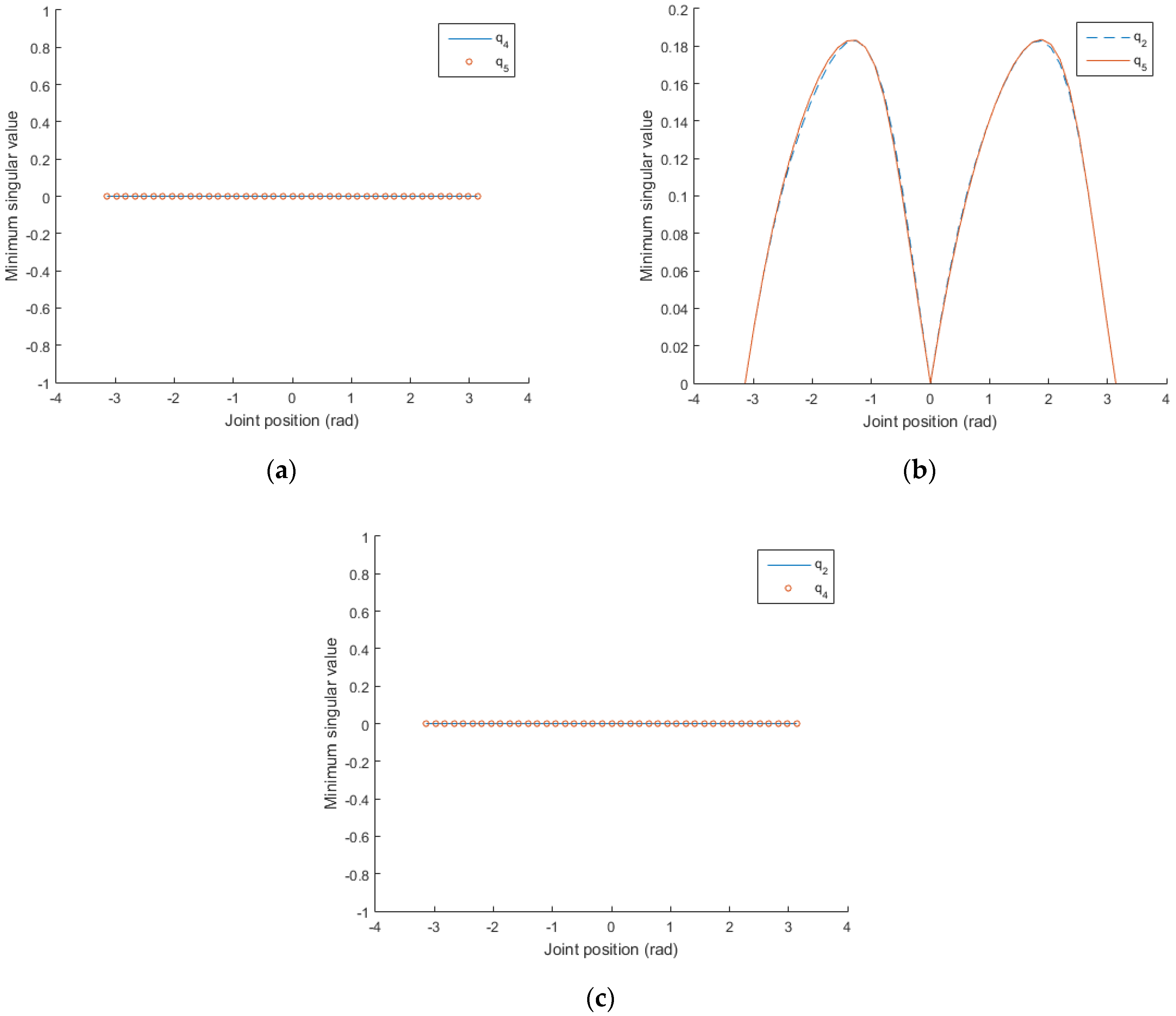
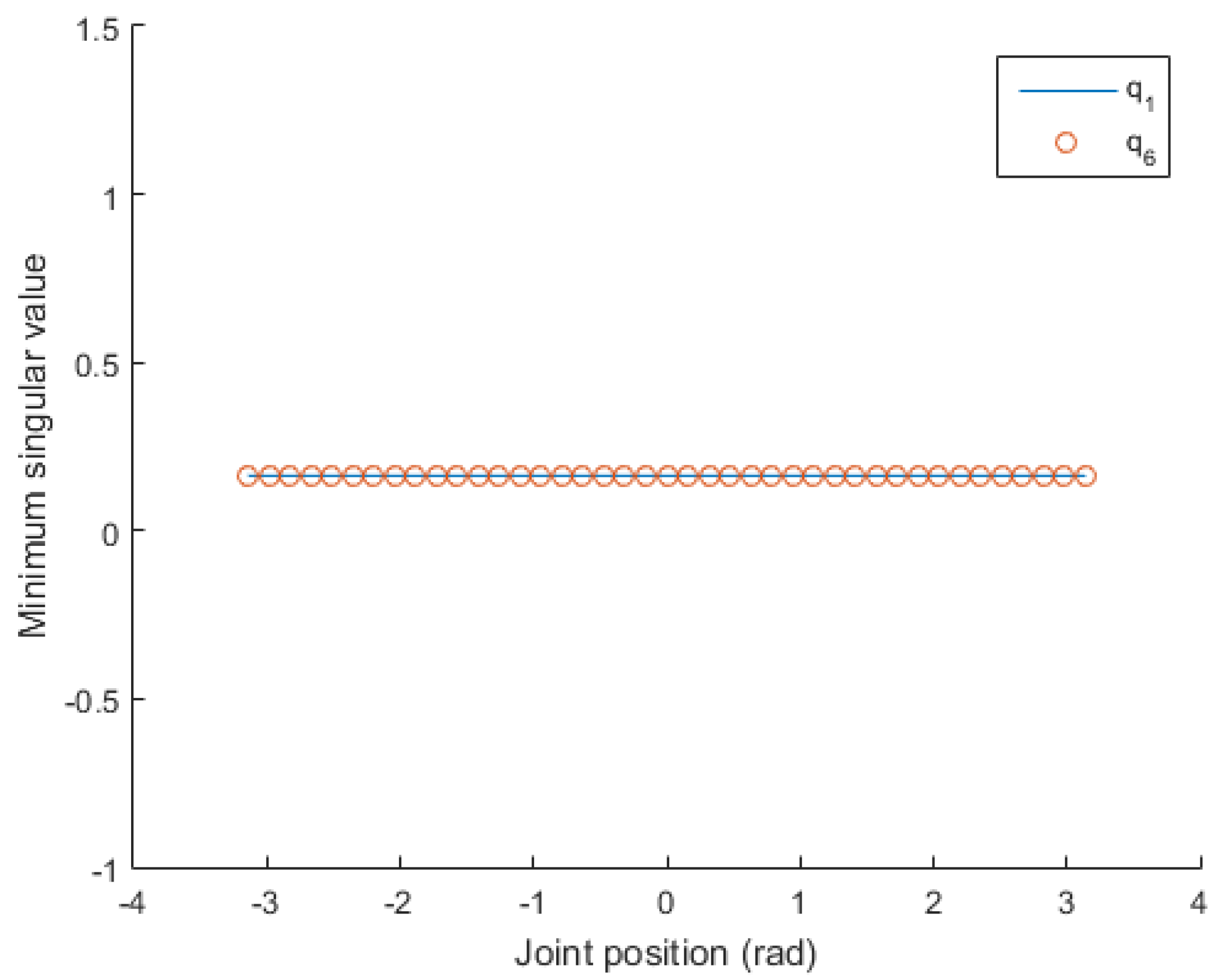
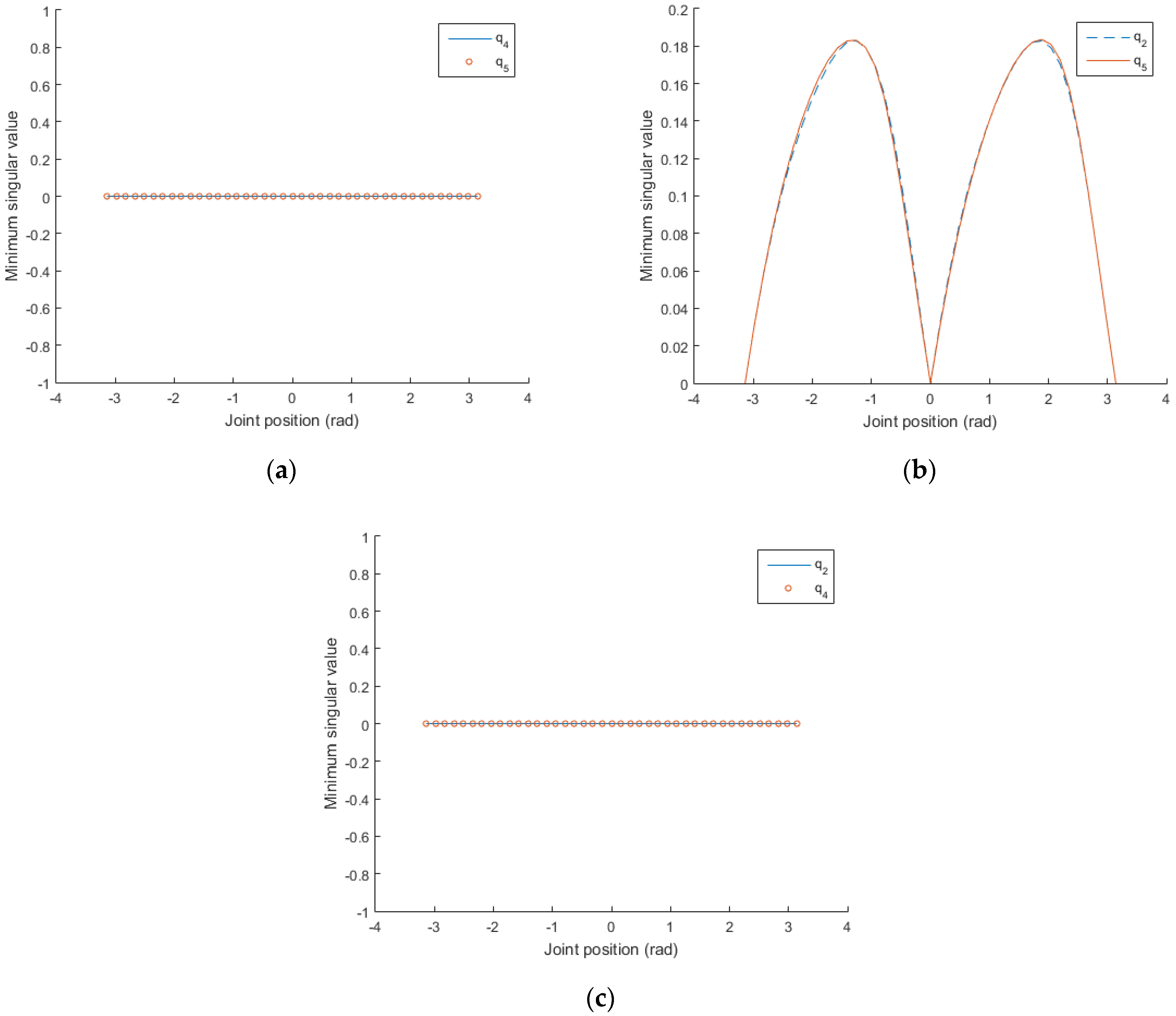
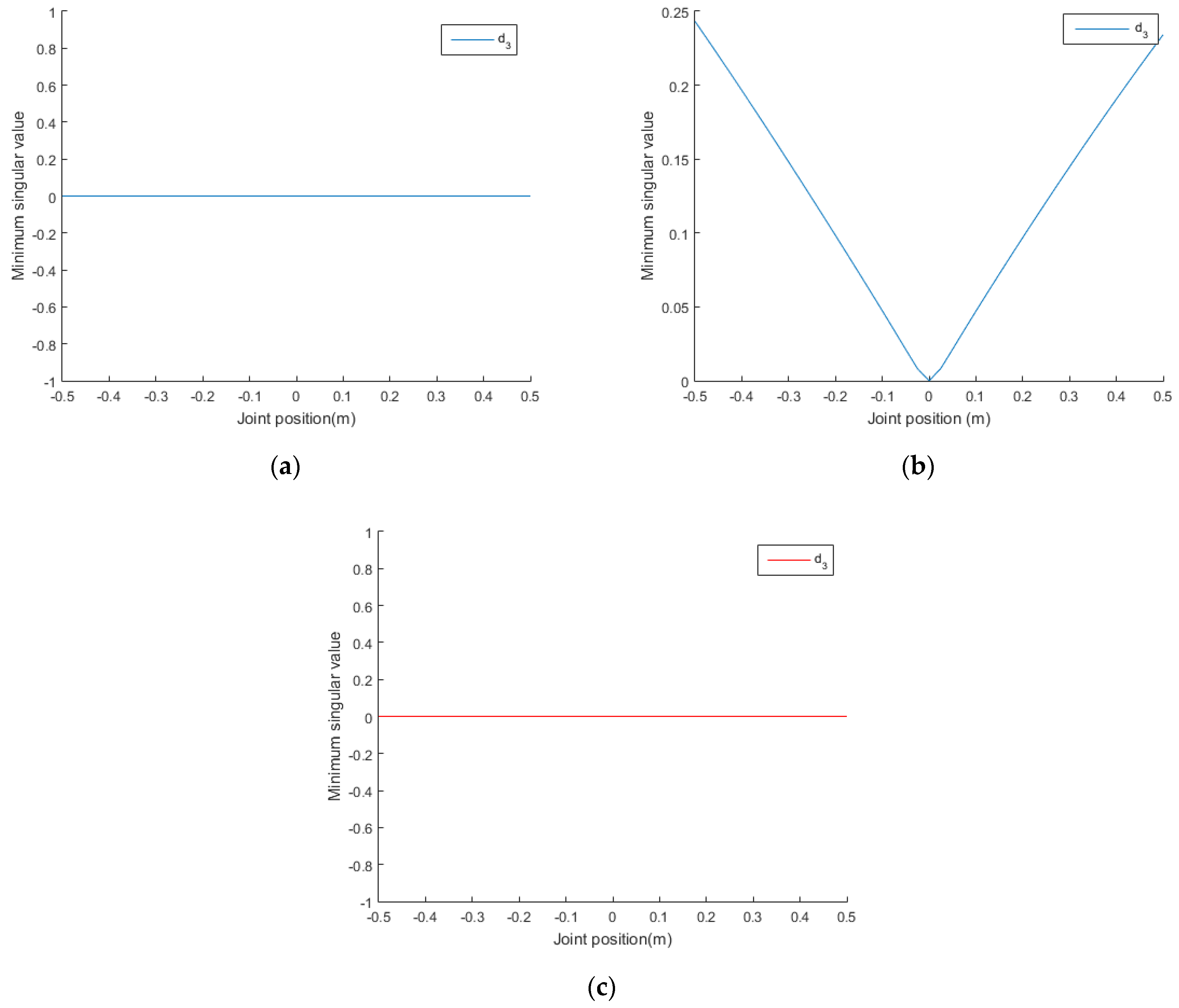
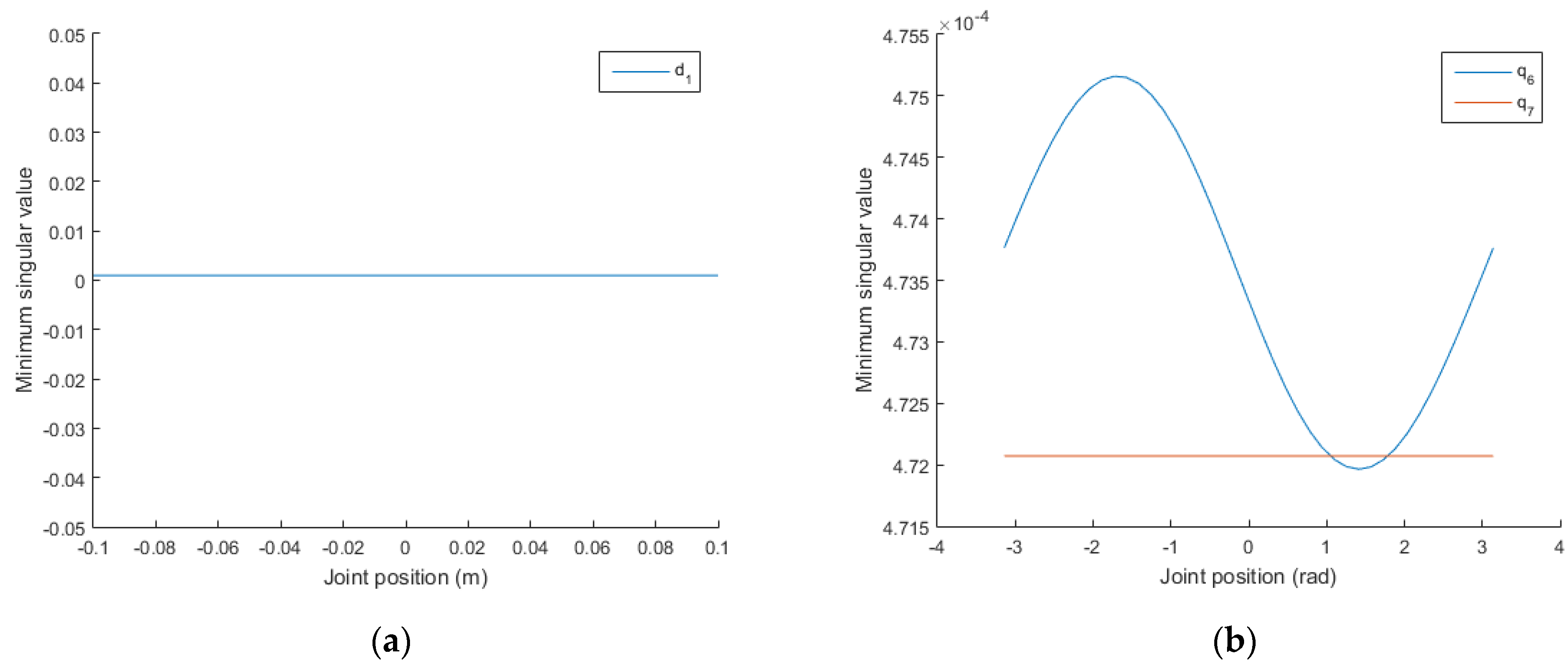
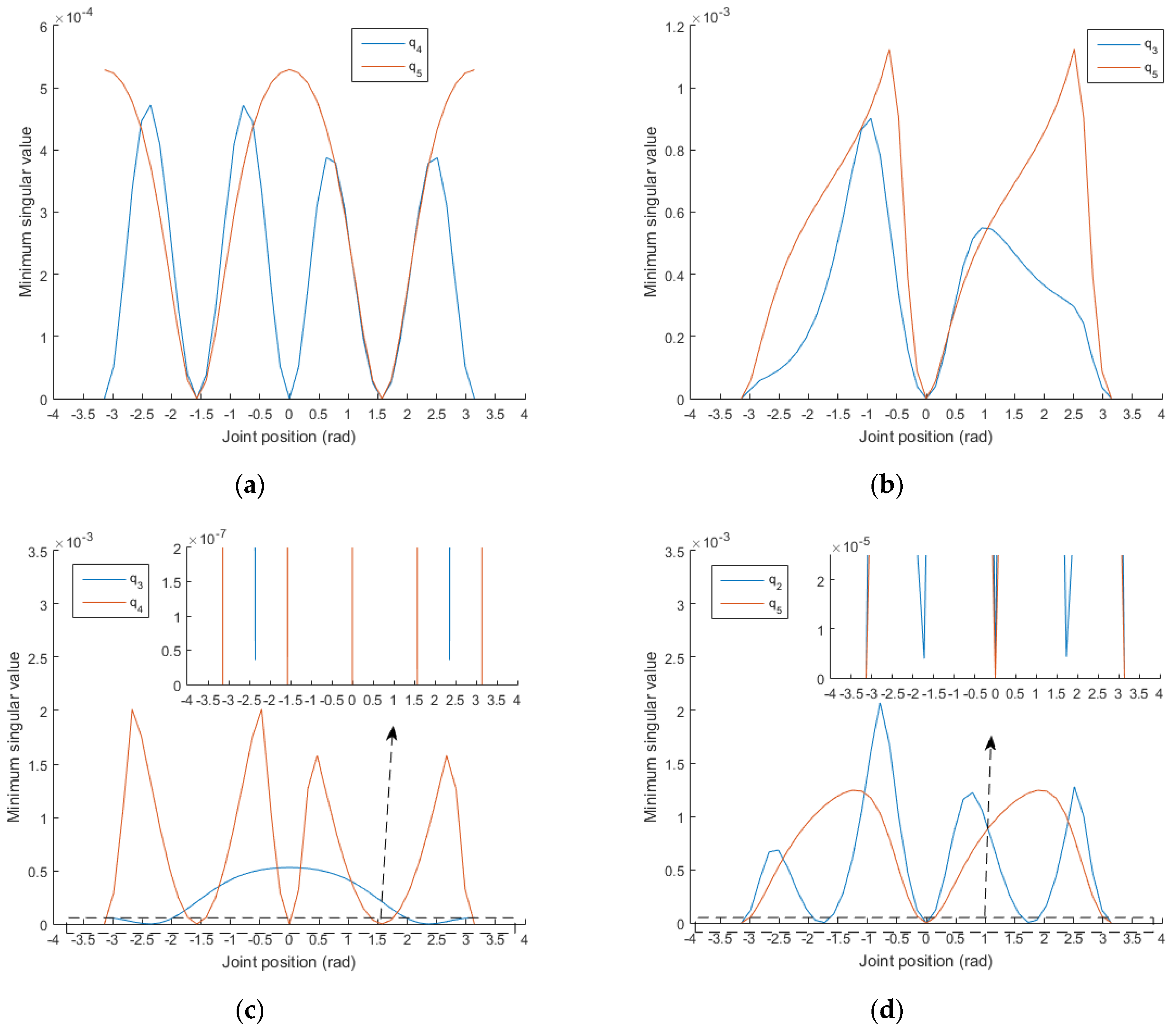
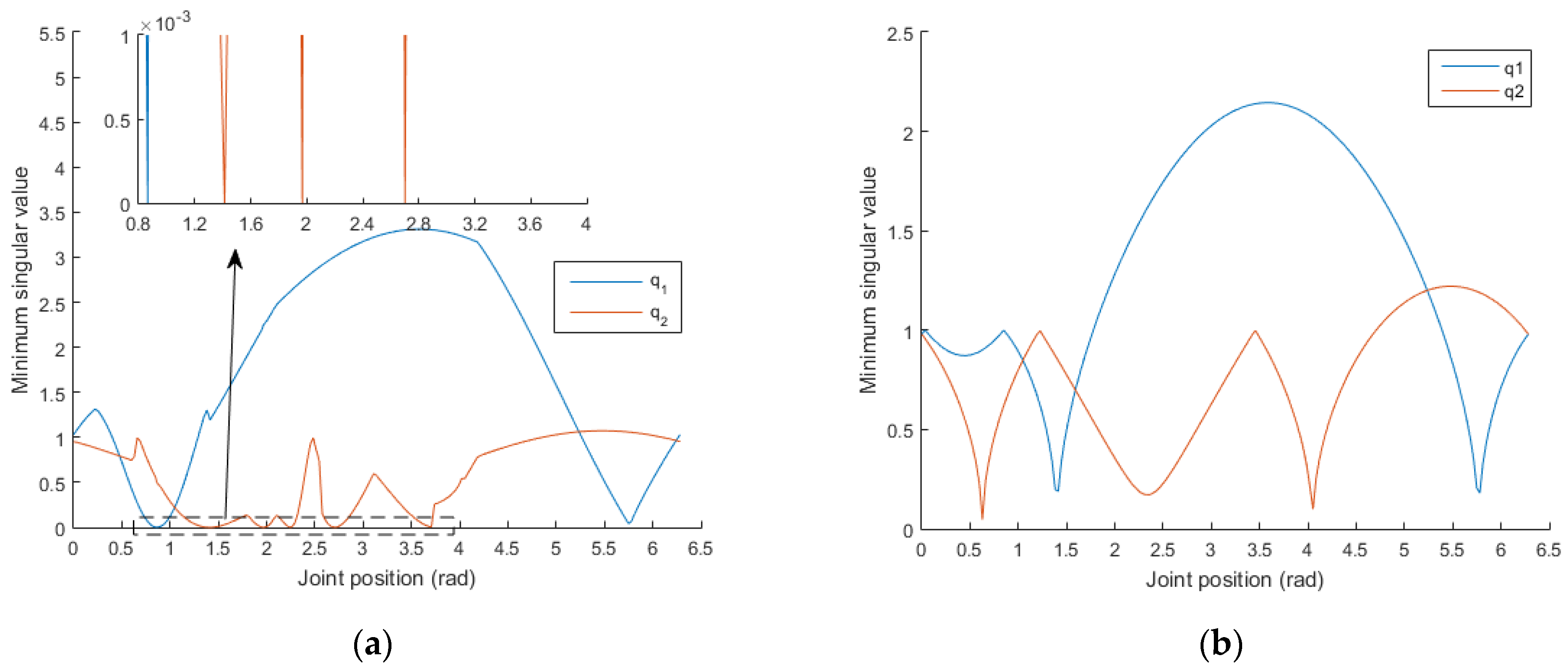
- First, all joint positions are set to , , , respectively, and substituted into Equation (4) or Equation (5). If the determinant is not zero, it means that this group of joint positions will not produce singularity, and these joint positions can be ignored in the subsequent steps. Then, on the basis of the set of joint positions in step 1, a joint position is selected and set to , , . From the remaining joints, a joint is selected and varied within its range, and the other joint positions remain unchanged. Finally, the distribution of the minimum singular value with the change in a joint position is obtained. For example, for a 6-DOF manipulator, , , and are set. Finally, the distribution of the minimum singular value with the change in is obtained. In the same way, the distributions of the minimum singular values with the changes of , , , and are also obtained;
- (3)
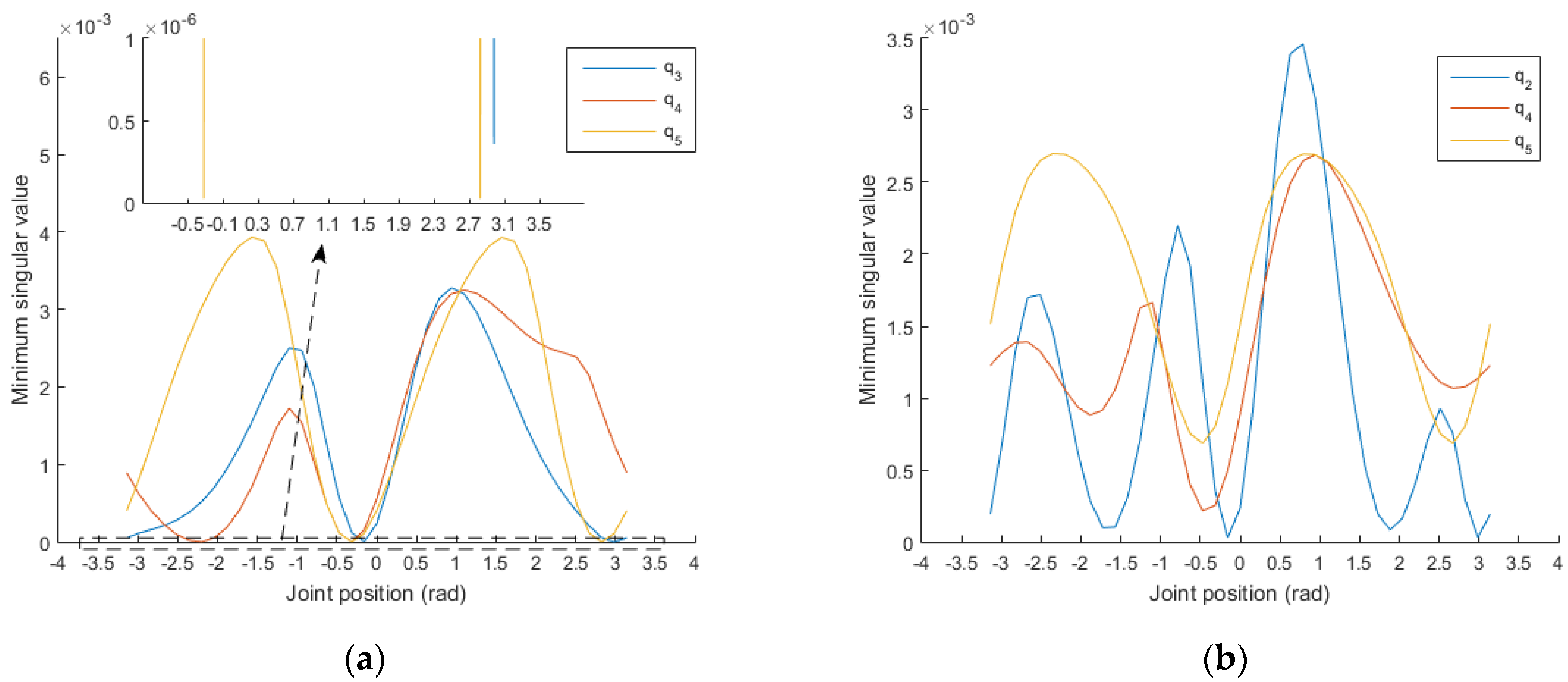
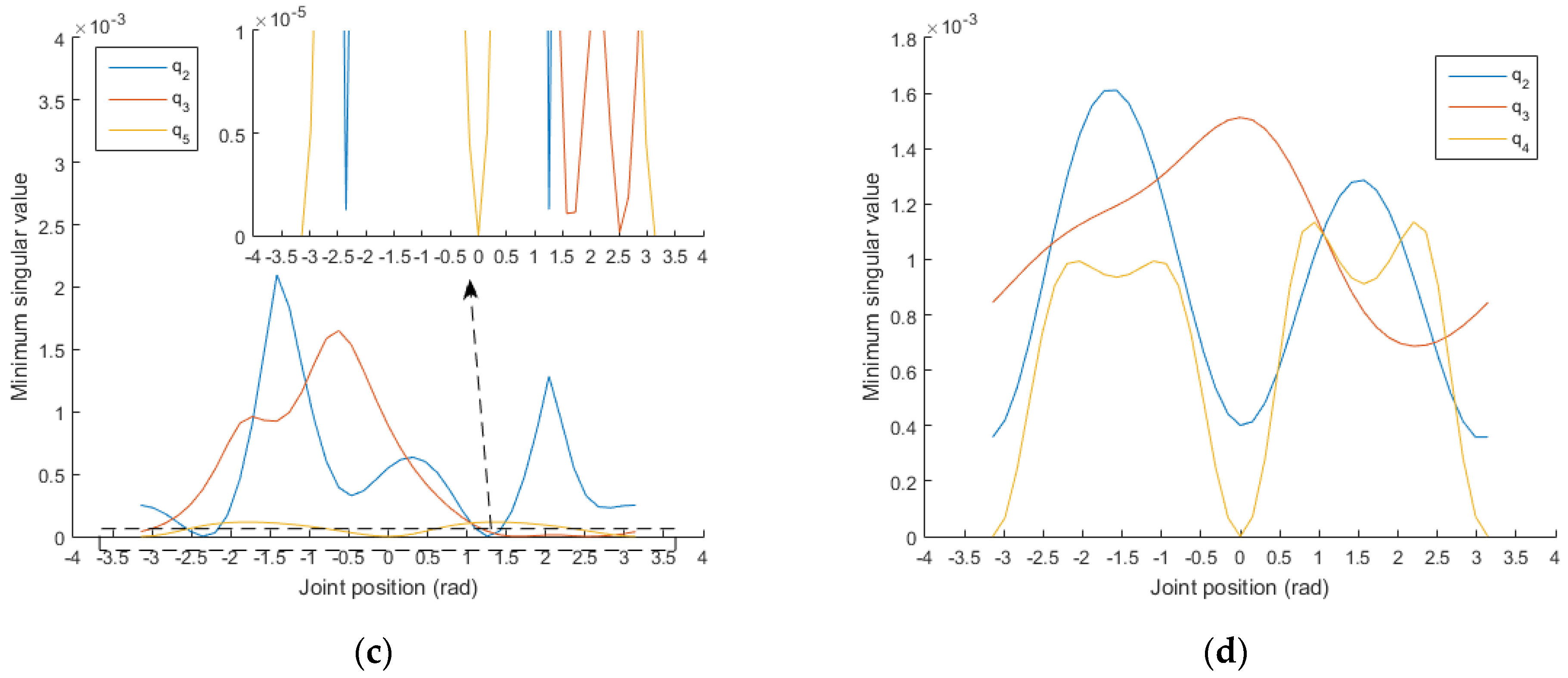
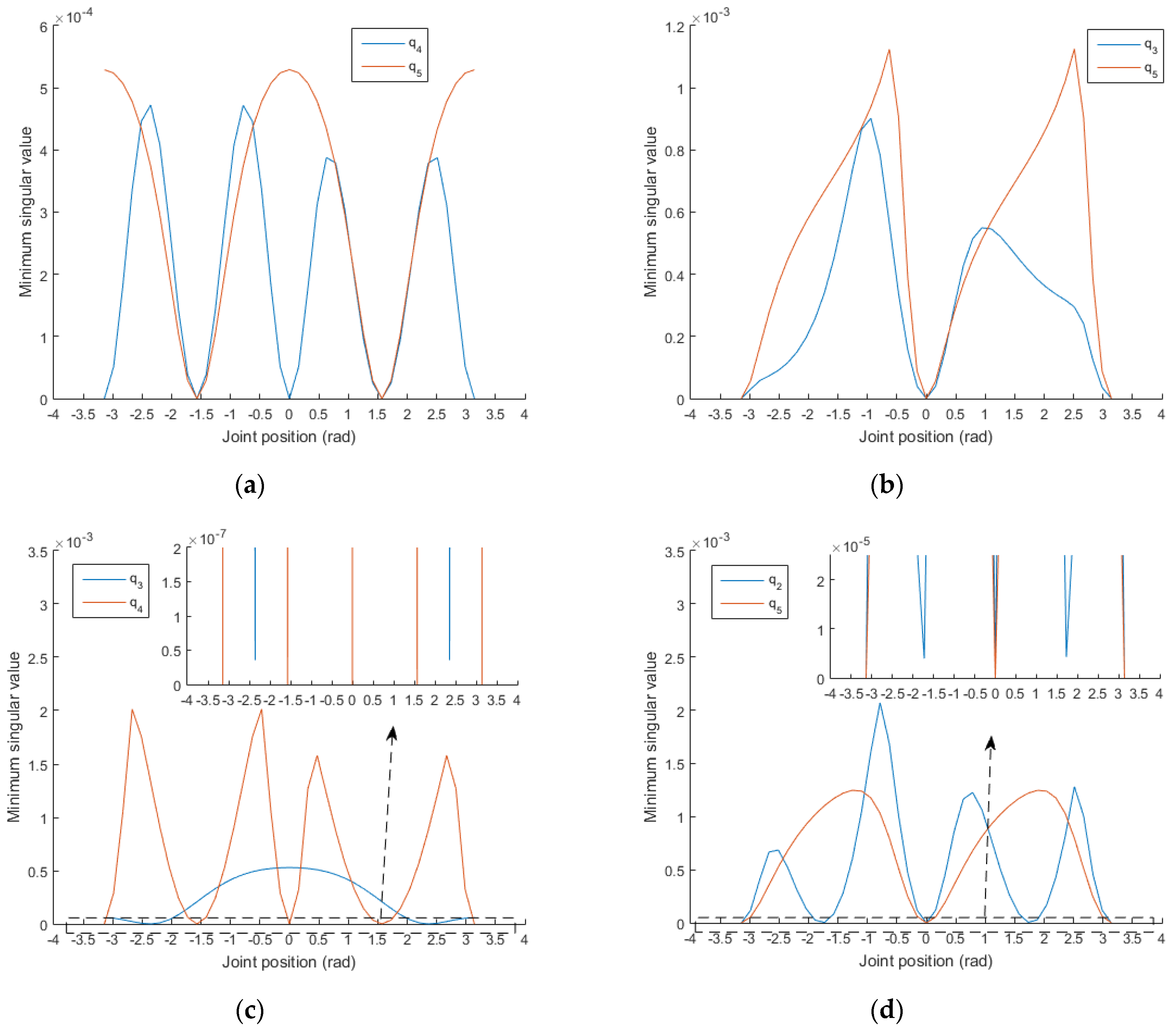
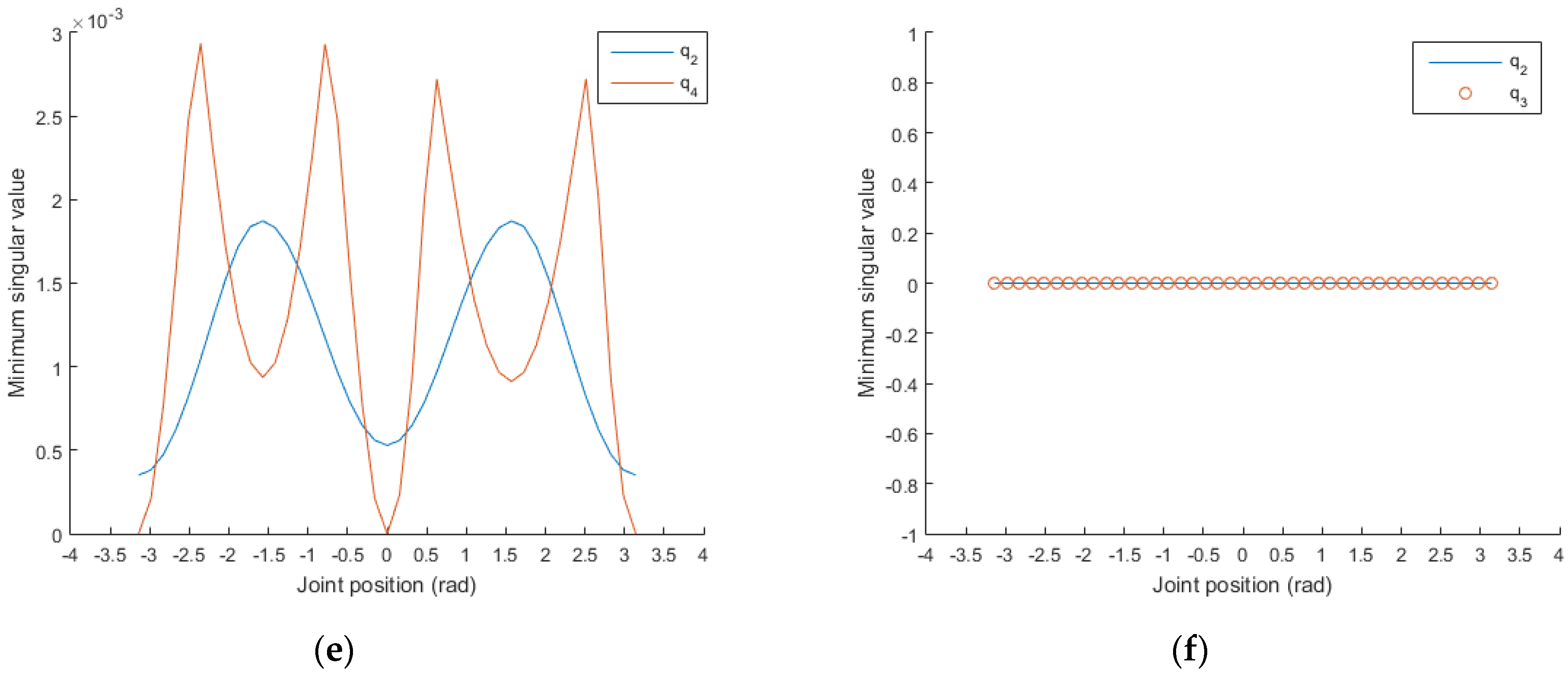
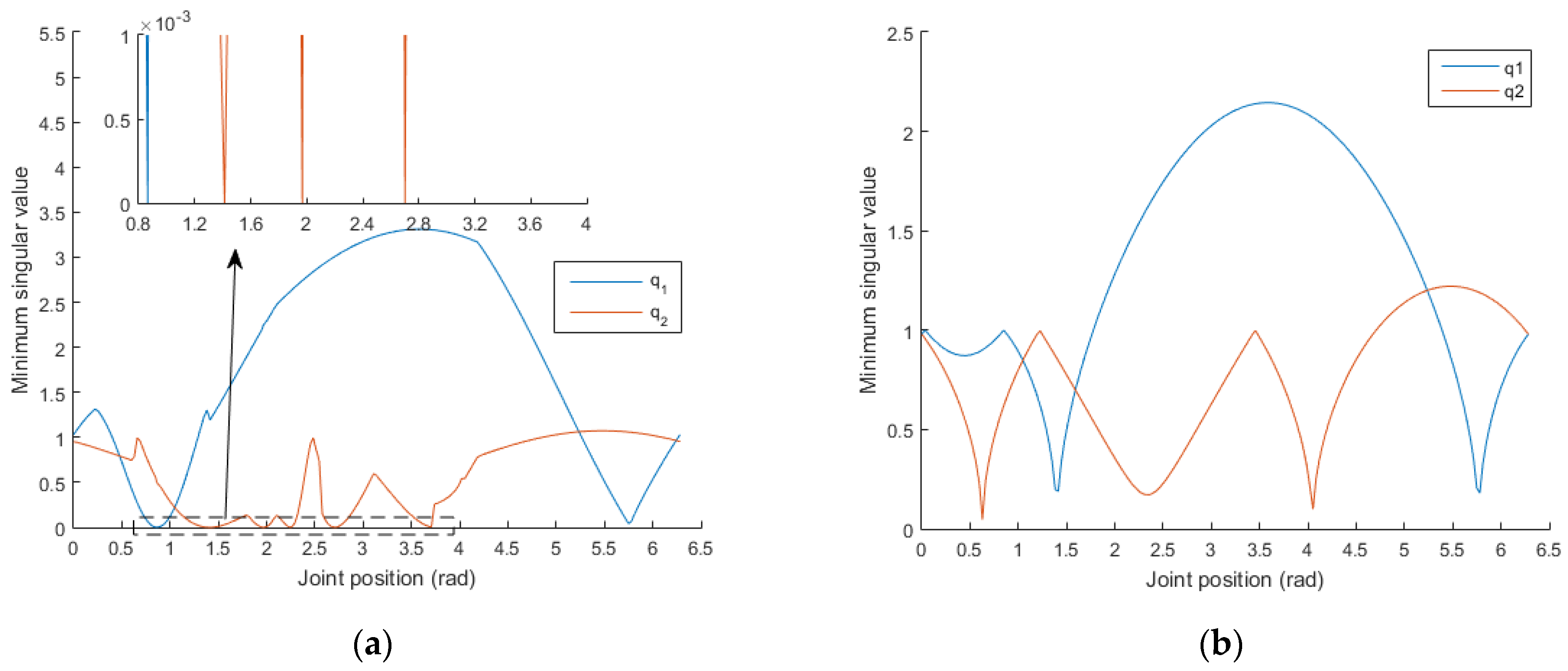
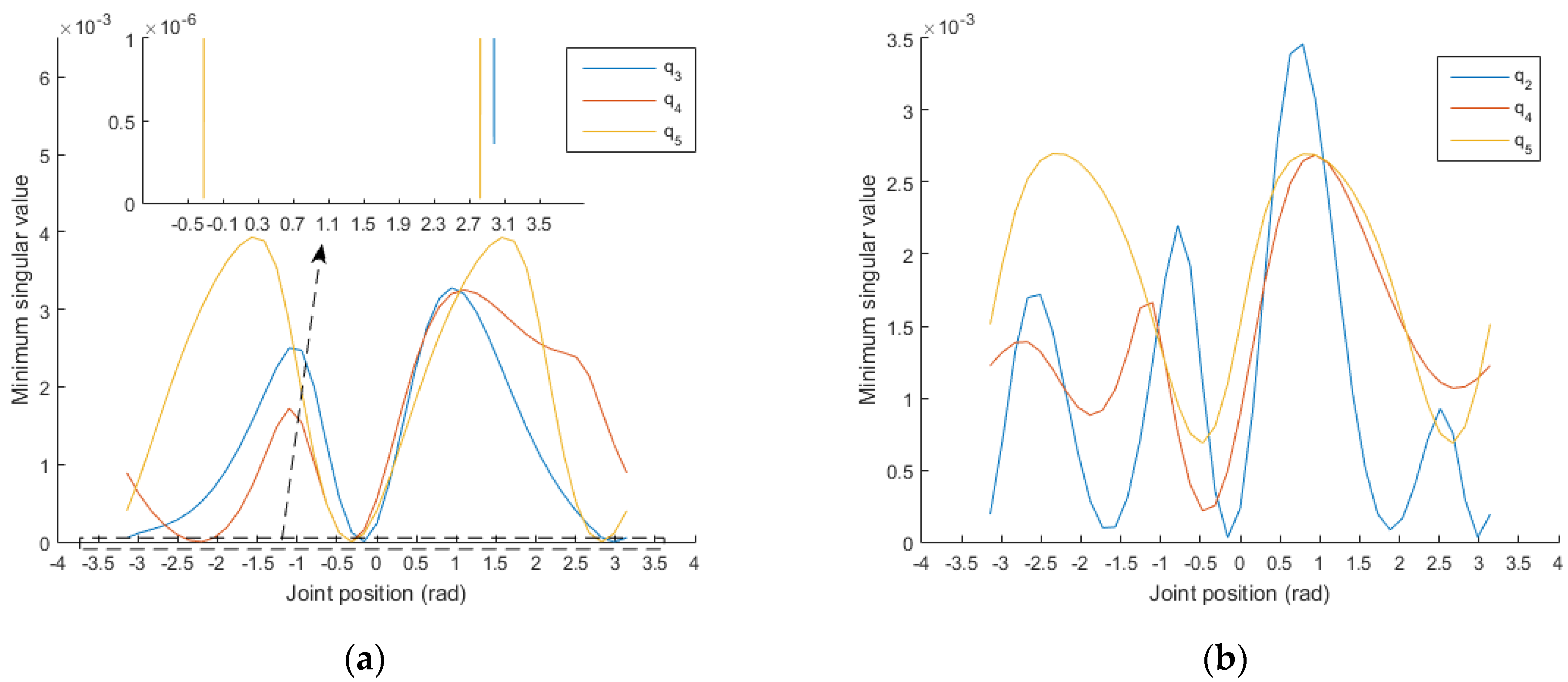
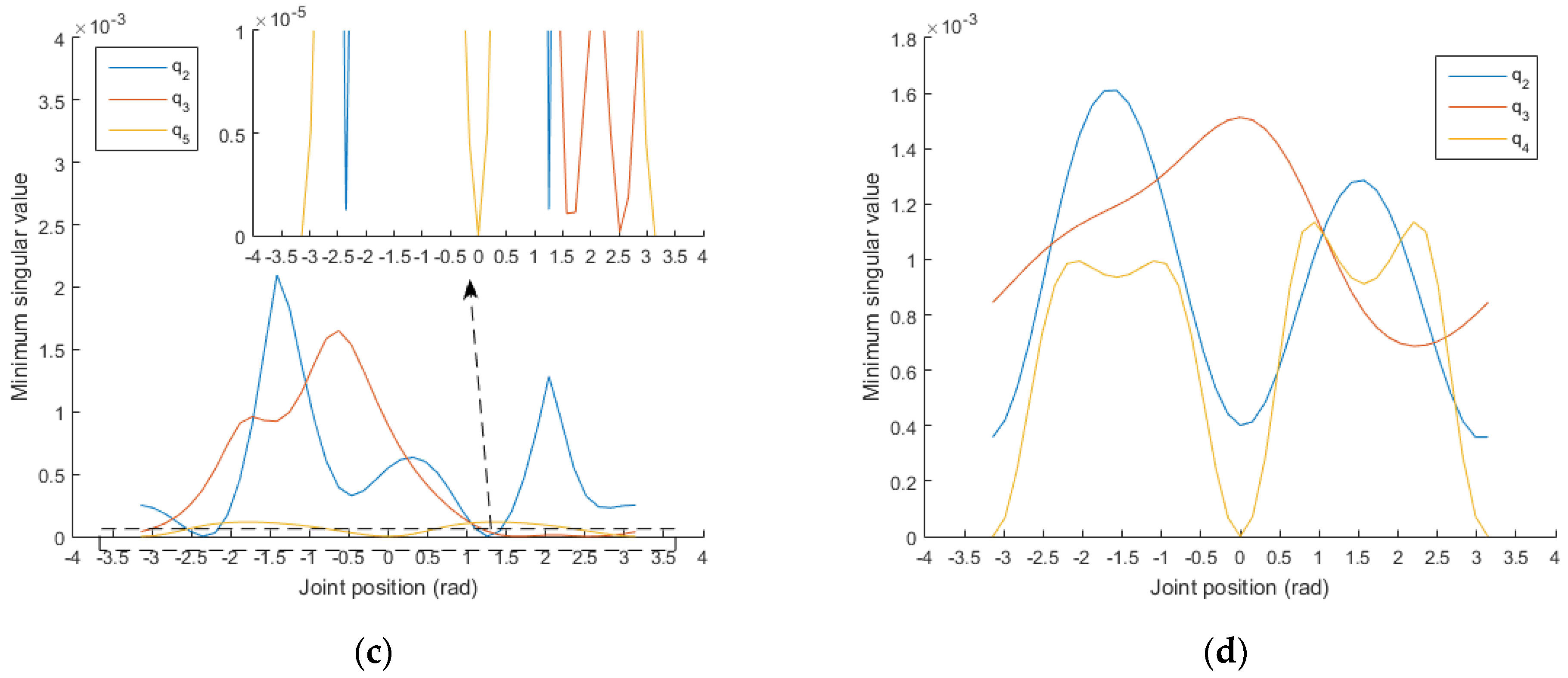
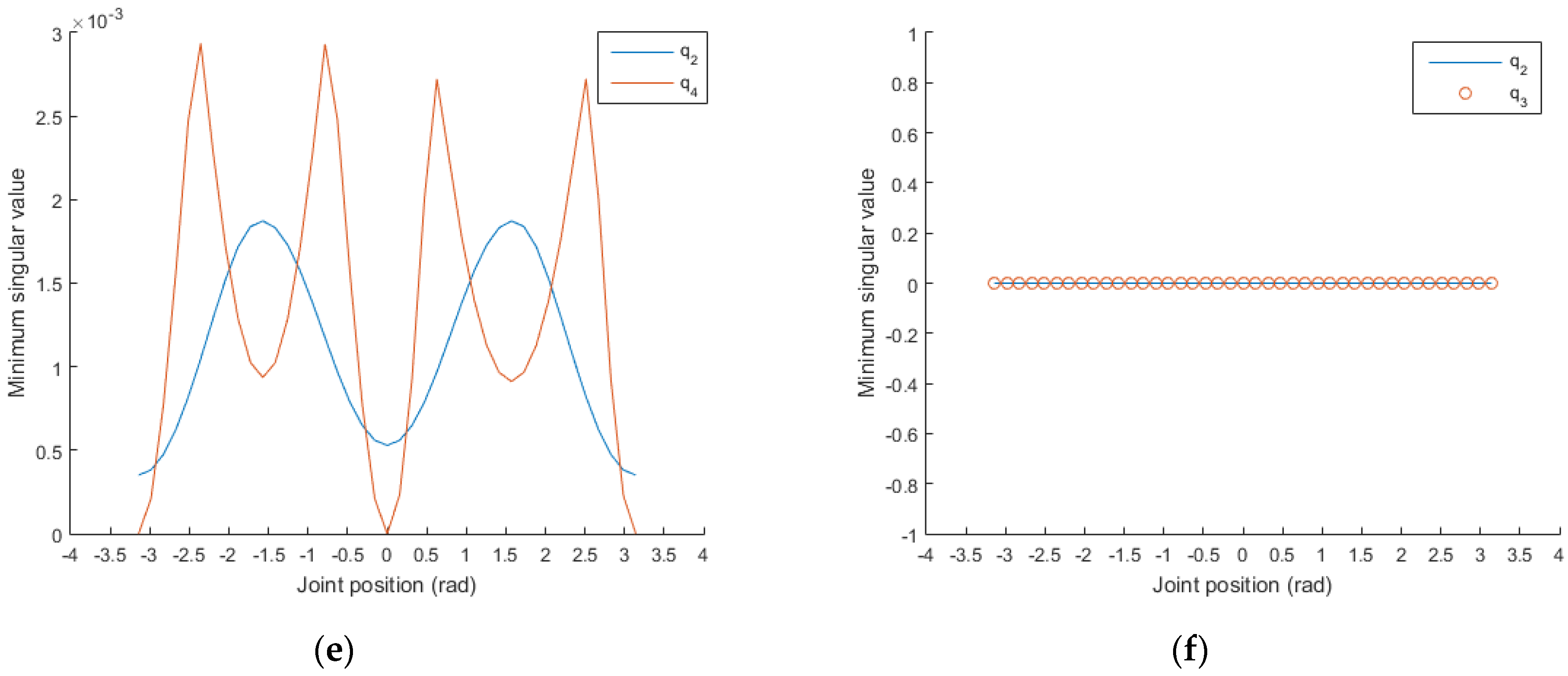
- On the basis of the set of joint positions in step 1, two joint positions are selected one by one and set to , , . From the remaining joints, a joint is selected and varied within its range, and the other joint positions remain unchanged. Finally, the distribution of the minimum singular value with the change in a joint position is obtained. For example, for a 6-DOF manipulator, , , and are set. Finally, the distribution of the minimum singular value with the change in is obtained. In the same way, the distributions of the minimum singular values with the changes in , , and are also obtained;
- (4)
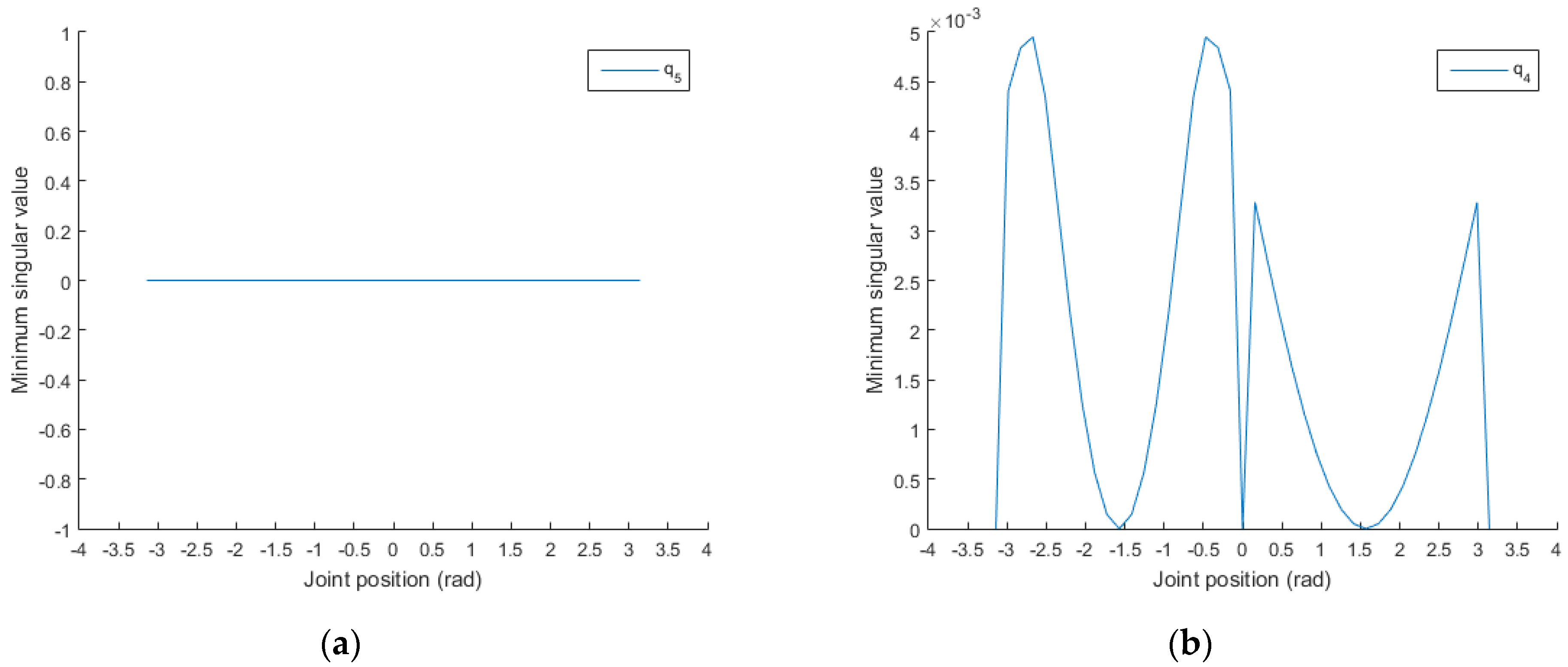
- The rest may be deduced by analogy: the distributions of the minimum singular values with the changes in all combined joint positions are obtained. When the minimum singular value is zero, singular configurations occur.
3.2.1. Singular Analysis of the Stanford Manipulator Based on the Proposed Method
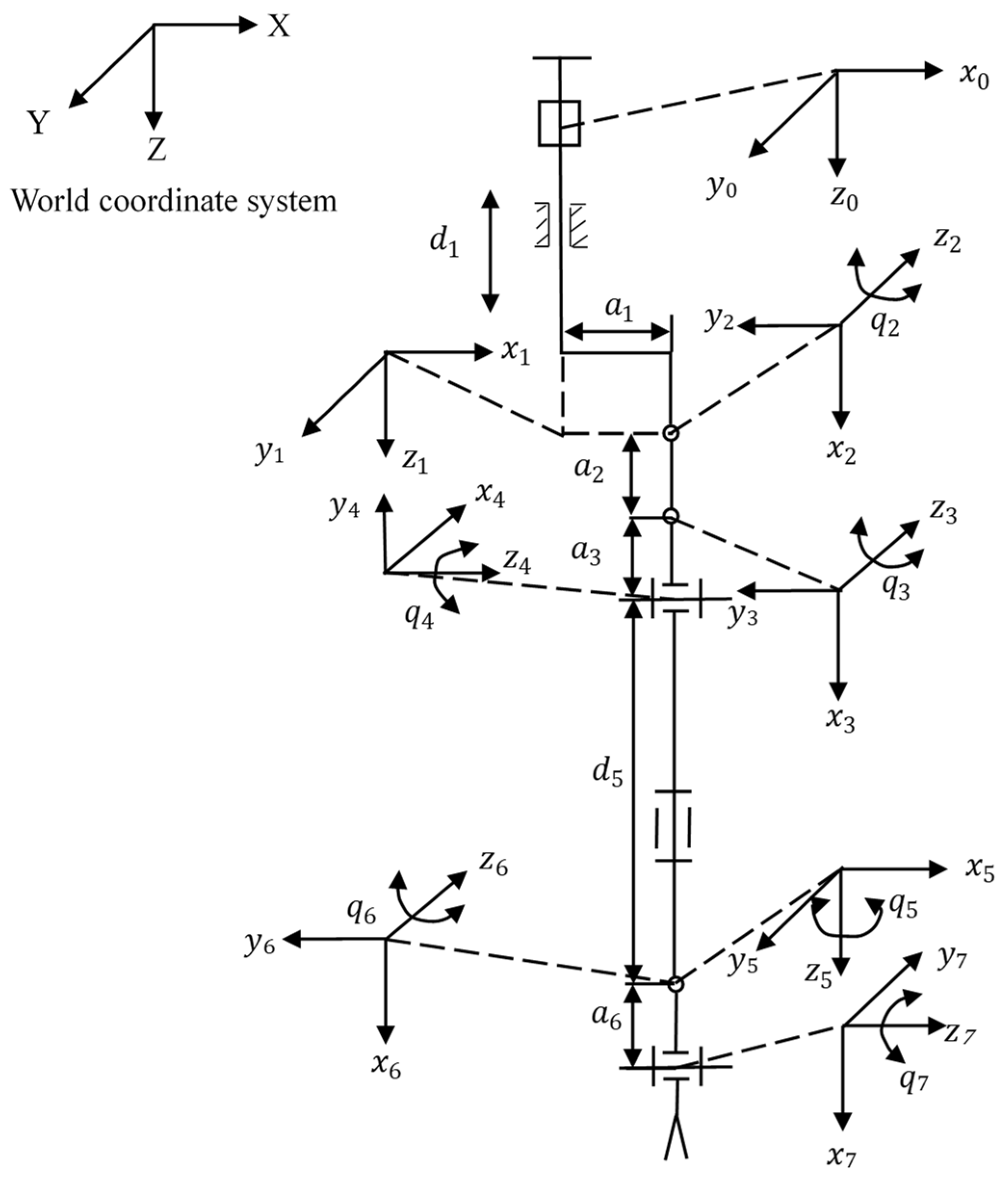
3.2.2. Singular Analysis of a 7-DOF Serial Manipulator Based on the Proposed Method
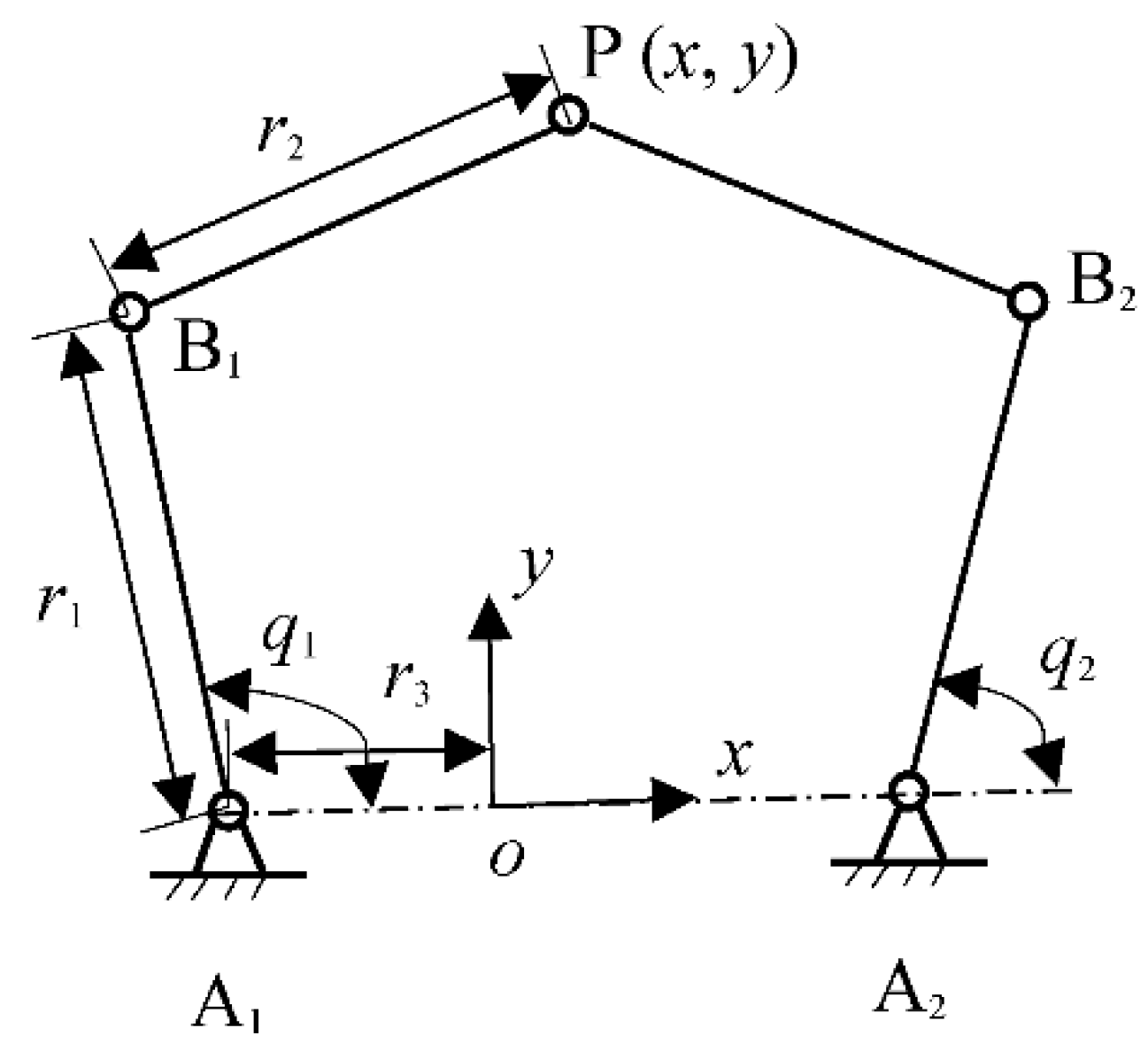
3.2.3. Singular Analysis of a Planar 5R Parallel Robot Based on the Proposed Method
4. Method Verification
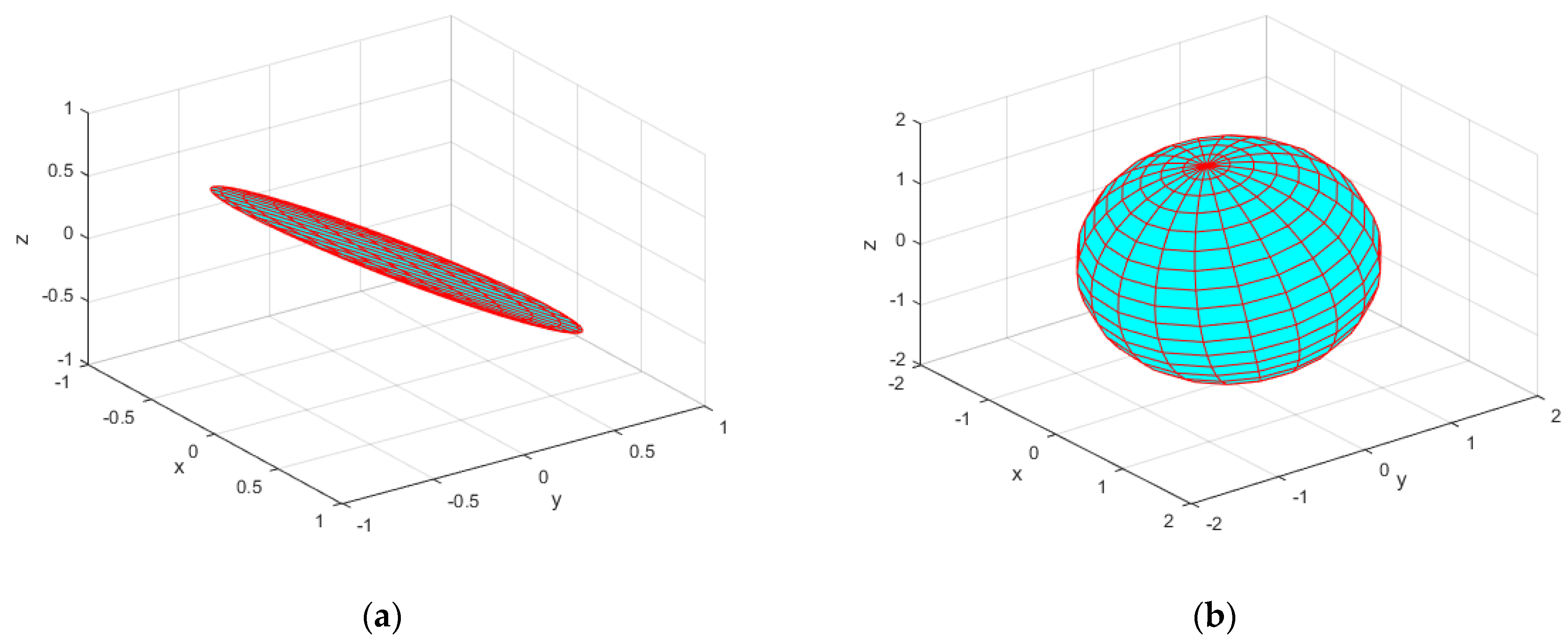
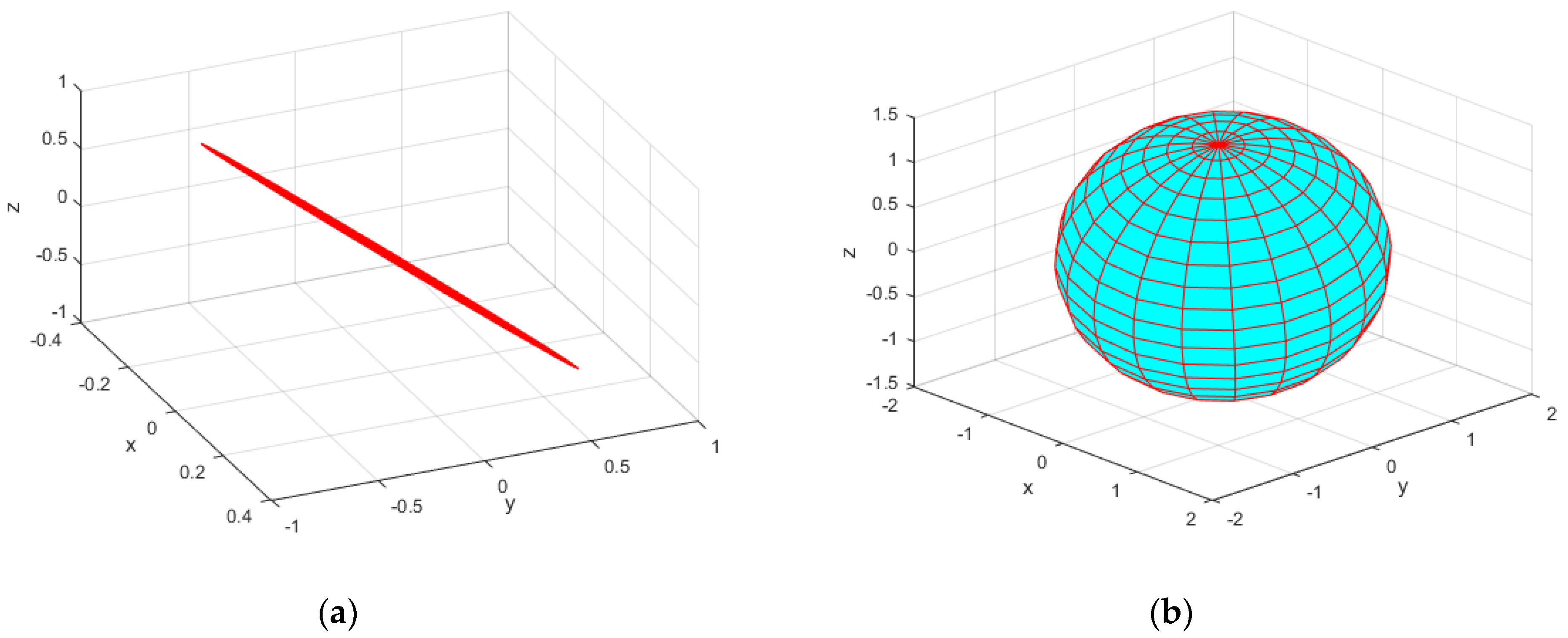
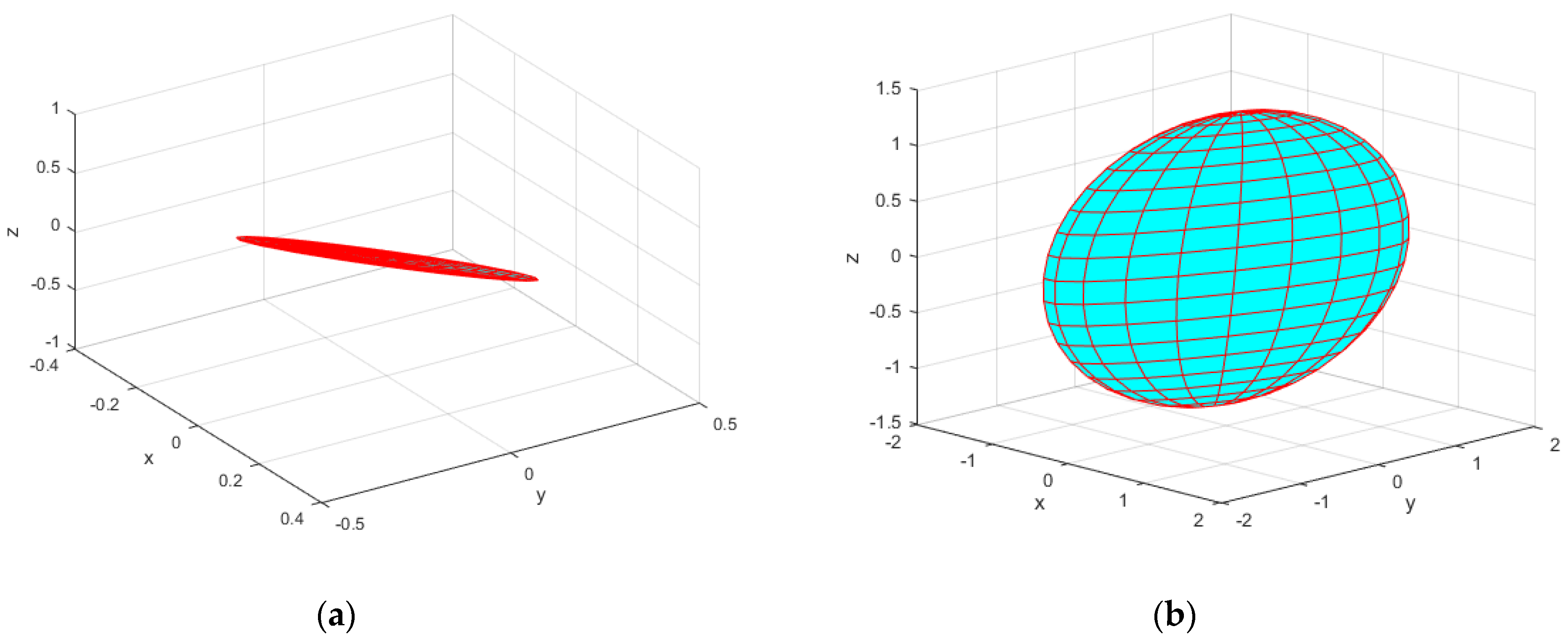
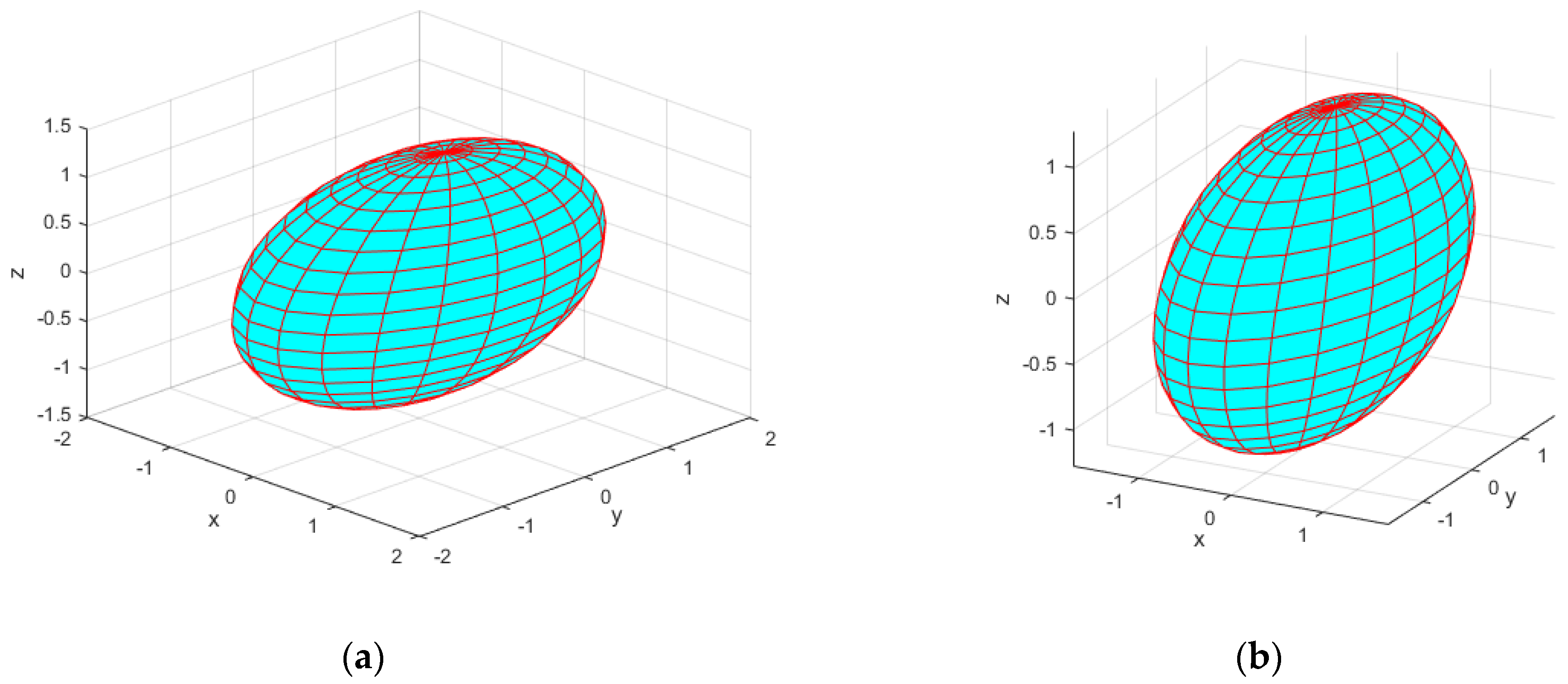
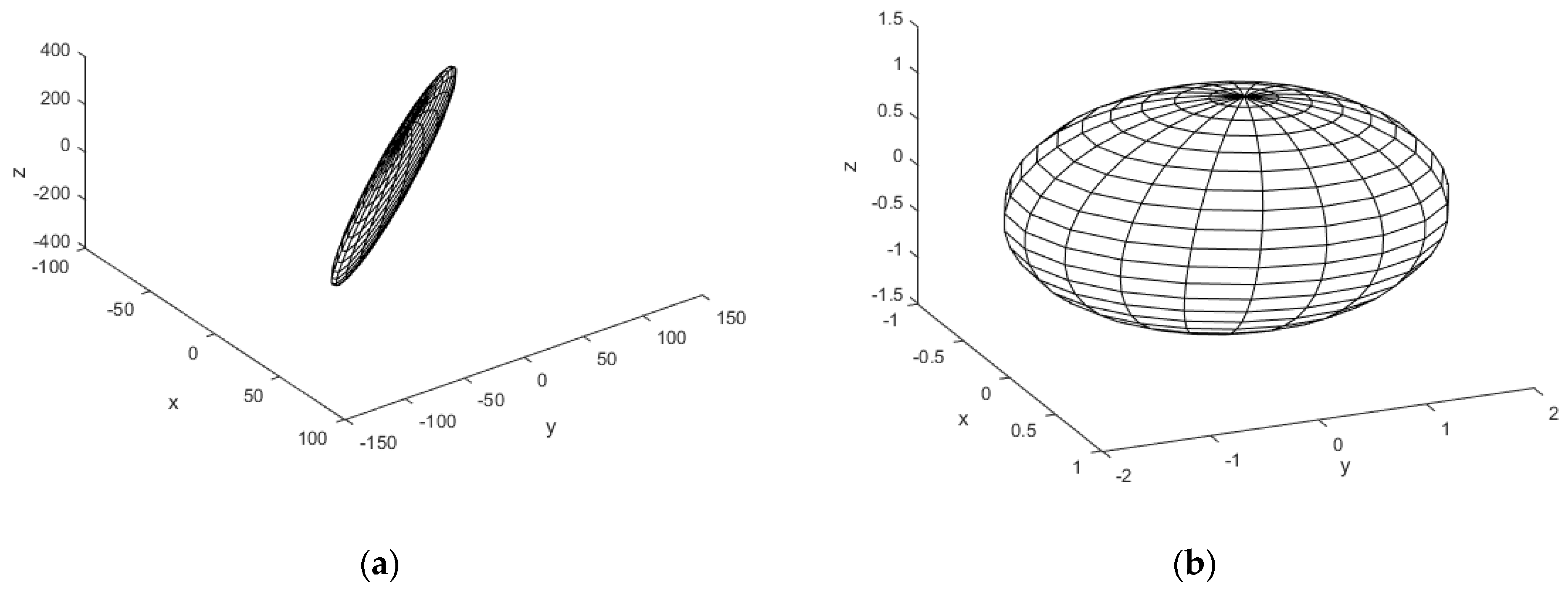
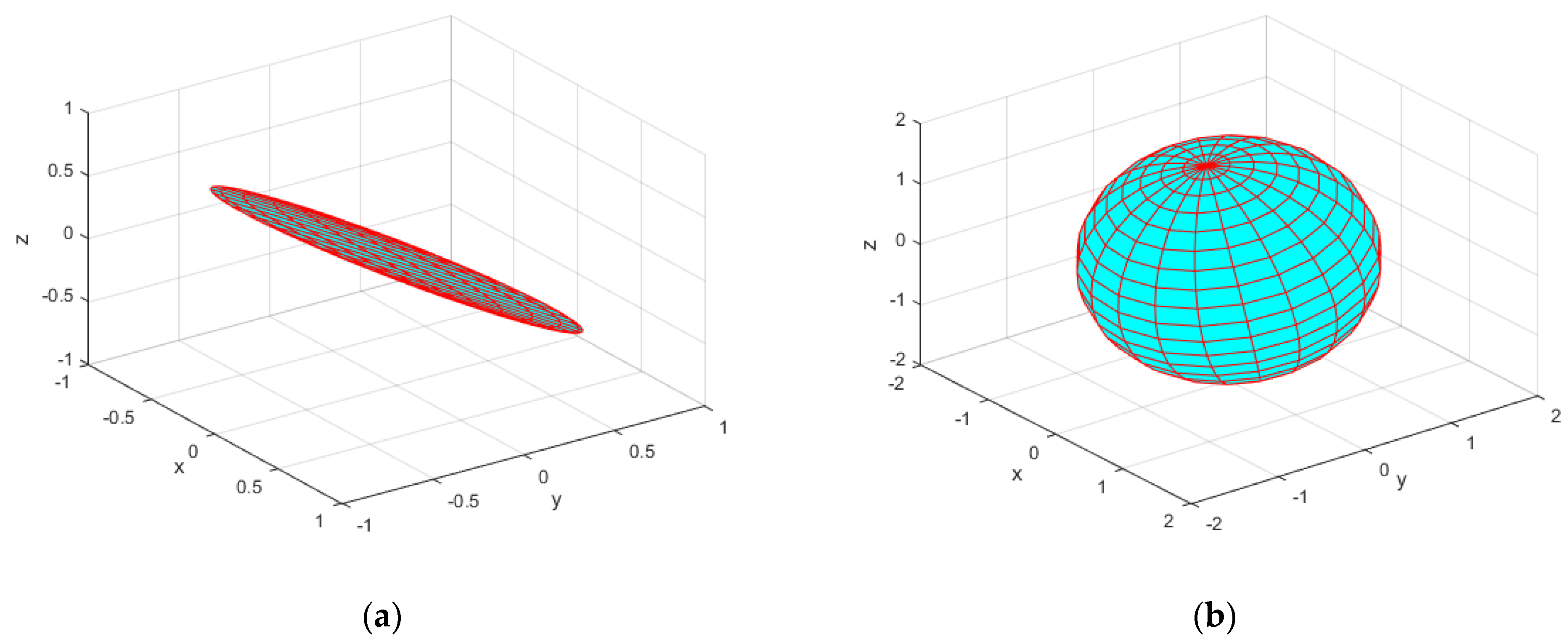
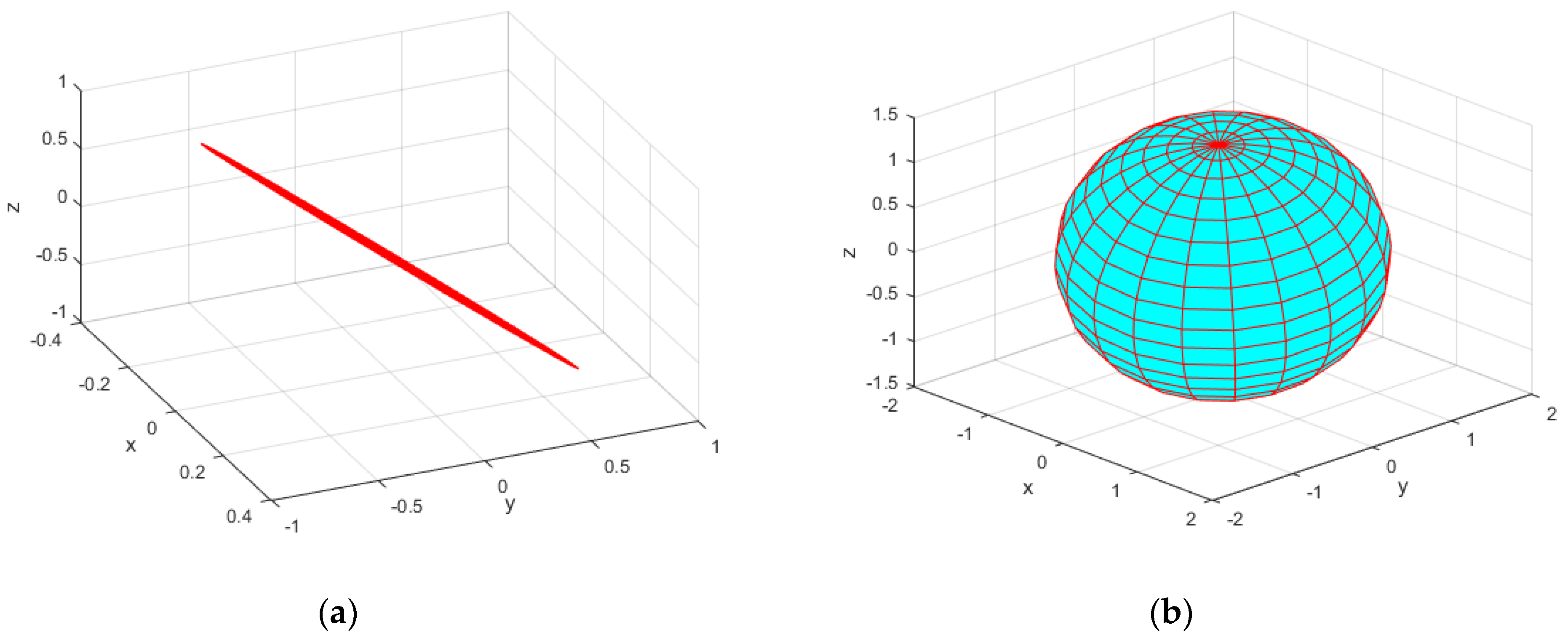
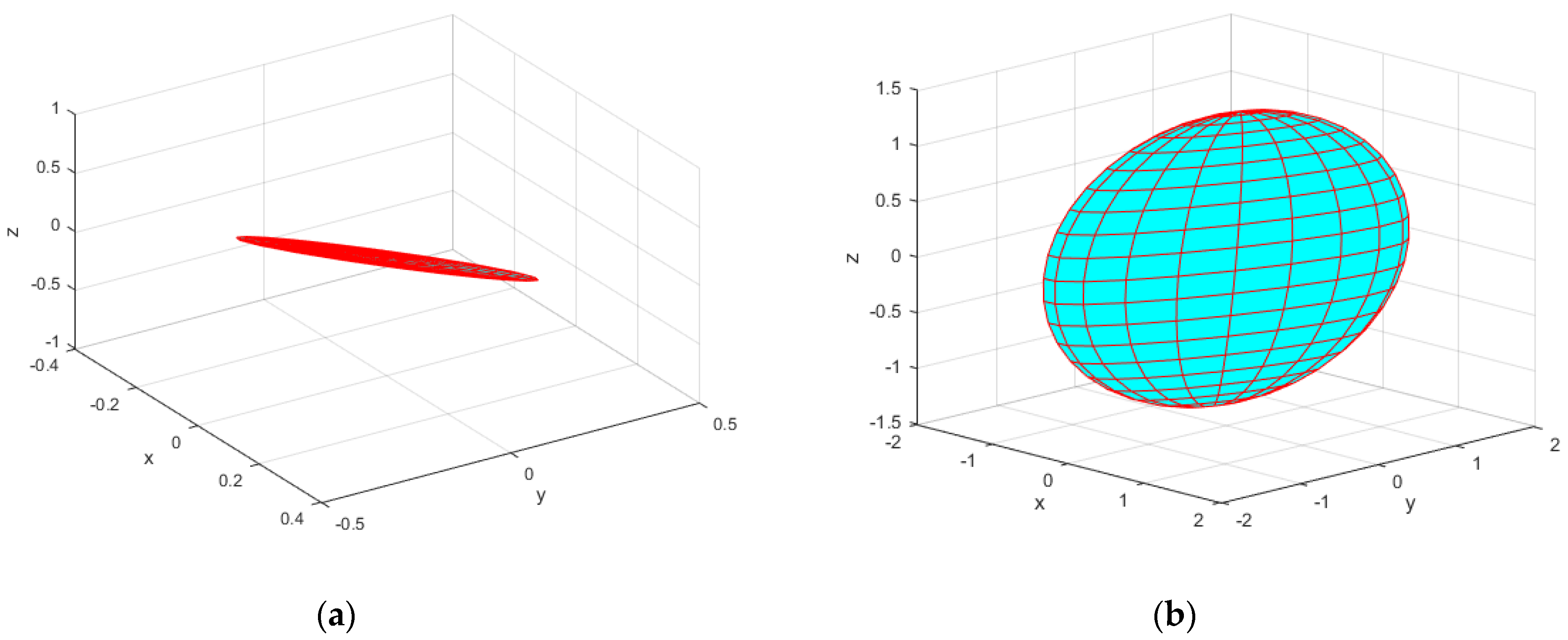
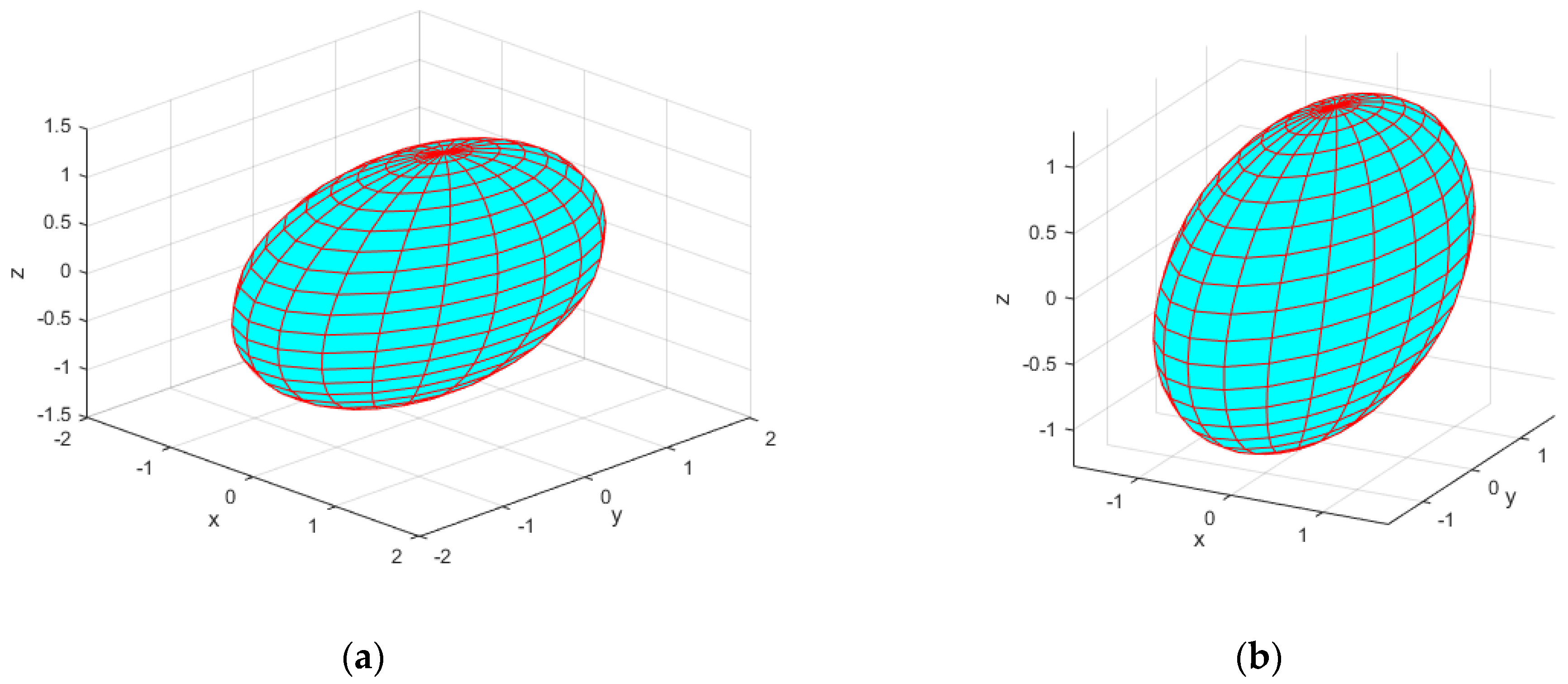
4.1. Singularity Configurations of the 7-DOF Serial Manipulator Verified through the EE Velocity Ellipsoid
4.2. Singularity Configurations of the 7-DOF Serial Manipulator and the Planar 5R Parallel Manipulator Verified through an Analytical Method
5. Conductions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Peiper, D.L. The Kinematics of Manipulators under Computer Control; Stanford University: Stanford, CA, USA, 1968. [Google Scholar]
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Stanford University: Stanford, CA, USA, 2018; pp. 105–108. [Google Scholar]
- Merlet, J.P. Parallel Robots; Springer: Dordrecht, The Netherlands, 2006; pp. 179–213. [Google Scholar]
- Müller, A. Local Analysis of Singular Configurations of Open and Closed Loop Manipulators. Multibody Syst. Dyn. 2002, 8, 299–328. [Google Scholar] [CrossRef]
- Li, C.Y.; Angeles, J.; Guo, H.W. Mobility and singularity analyses of a symmetric multi-loop mechanism for space applications. Proc. Inst. Mech. Eng. C. J. Mech. Eng. Sci. 2021. [Google Scholar] [CrossRef]
- Han, J.Y.; Shi, S.J. A novel methodology for determining the singularities of planar linkages based on Assur groups. Mech. Mach. Theory 2020, 147, 103751. [Google Scholar] [CrossRef]
- Chen, Z.M.; Li, M.; Kong, X.W.; Zhao, C. Kinematics analysis of a novel 2R1T 3-PUU parallel mechanism with multiple rotation centers. Mech. Mach. Theory 2020, 152, 103938. [Google Scholar] [CrossRef]
- Nayak, A.; Caro, S.; Wenger, P. Kinematic analysis of the 3-RPS-3-SPR series-parallel manipulator. Robotica. 2019, 37, 1240–1266. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.Y.; Chen, Q.H.; Yao, H.J.; Chai, X.X.; Li, Q.C. Singularity analysis of the 3/6 Stewart parallel manipulator using geometric algebra. Math. Method. Appl. Sci. 2018, 41, 2494–2506. [Google Scholar] [CrossRef]
- Wu, X.Y.; Bai, S.P. Analytical determination of shape singularities for three types of parallel manipulators. Mech. Mach. Theory 2020, 149, 103812. [Google Scholar] [CrossRef]
- Ben-Horin, P.; Shoham, M. Application of Grassmann—Cayley Algebra to Geometrical Interpretation of Parallel Robot Singularities. Int. J. Robot. Res. 2009, 28, 127–141. [Google Scholar] [CrossRef]
- Conconi, M.; Carricato, M. A New Assessment of Singularities of Parallel Kinematic Chains. IEEE. T. Robot. 2009, 25, 757–770. [Google Scholar] [CrossRef]
- Pagis, G.; Bouton, N.; Briot, S.; Martinet, P. Enlarging parallel robot workspace through Type-2 singularity crossing. Control Eng Pract. 2015, 39, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Li, X.H.; Sheng, R.; Zhang, L.G.; Song, T.; Zhang, J. Singular Configuration Analysis of 6-DOF Modular Manipulator. Tran. Chin. Soc. Agric. Mach. 2017, 7, 376–382. [Google Scholar]
- Yu, T.; Wang, D.; Gao, L. Singularity avoidance for manipulators with spherical wrists using the approximate damped reciprocal algorithm. Int. J. Adv. Robot. Syst. 2021, 18, 172988142199568. [Google Scholar] [CrossRef]
- Carmichael, M.G.; Liu, D.; Waldron, K.J. A framework for singularity-robust manipulator control during physical human-robot interaction. Int. J. Robot. Res. 2017, 36, 027836491769874. [Google Scholar] [CrossRef] [Green Version]
- Kang, Z.H.; Cheng, C.A.; Huang, H.P. A singularity handling algorithm based on operational space control for six-degree-of-freedom anthropomorphic manipulators. Int. J. Adv. Robot. Syst. 2019, 16, 172988141985891. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.F.; Zhang, J.T.; Liang, B.; Li, B. Singularity Analysis and Avoidance for Robot Manipulators with Non-spherical Wrists. IEEE Trans. Ind. Electron. 2016, 63, 277–290. [Google Scholar] [CrossRef]
- Hijazi, A.; Brethé, J.F.; Lefebvre, D. Singularity analysis of a planar robotic manipulator: Application to an XY-Theta platform. Mech. Mach. Theory 2016, 100, 104–119. [Google Scholar] [CrossRef]
- Müller, A. Higher-Order Analysis of Kinematic Singularities of Lower Pair Linkages and Serial Manipulators. J. Mech. Robot. 2018, 10, 011008. [Google Scholar] [CrossRef]
- Oetomo, D.; Ang, M.H., Jr. Singularity robust algorithm in serial manipulators. Robot Comput. Integr. Manuf. 2009, 25, 122–134. [Google Scholar] [CrossRef]
- Rebouças Filho, P.P.; da Silva, S.P.; Praxedes, V.N.; Hemanth, J.; de Albuquerque, V.H.C. Control of singularity trajectory tracking for robotic manipulator by genetic algorithms. J. Comput. Sci. 2019, 30, 55–64. [Google Scholar] [CrossRef]
- Wang, X.H.; Zhang, D.W.; Zhao, C.; Zhang, H.Y.; Yan, H.L. Singularity analysis and treatment for a 7R 6-DOF painting robot with non-spherical wrist. Mech. Mach. Theory 2018, 126, 92–107. [Google Scholar] [CrossRef]
- Dimeas, F.; Moulianitis, V.C.; Aspragathos, N. Manipulator performance constraints in human-robot cooperation. Robot. Comput. Integr. Manuf. 2017, 50, 222–233. [Google Scholar] [CrossRef]
- Wu, J.; Deer, B.; Feng, X.; Wen, Z.; Yin, Z. GA based adaptive singularity-robust path planning of space robot for on-orbit detection. Complexity 2018, 6, 1–11. [Google Scholar] [CrossRef]
- Li, T.; Pei, L.; Xiang, Y.; Wu, Q.; Yu, W. P3-LOAM: PPP/LiDAR Loosely Coupled SLAM with Accurate Covariance Estimation and Robust RAIM in Urban Canyon Environment. IEEE Sens. J. 2020, 21, 6660–6671. [Google Scholar] [CrossRef]
- Huo, W. Robot Dynamics and Control; Higher Education Press: Beijing, China, 2004. [Google Scholar]
- Liu, X.J.; Wang, J.S.; Pritschow, G. Kinematics, Singularity and Workspace of Planar 5R Symmetrical Parallel Mechanisms. Mech. Mach. Theory. 2006, 41, 145–169. [Google Scholar] [CrossRef]
- Wen, K.F.; Nguyen, T.S.; Harton, D.; Laliberte, T.; Gosselin, C. A Backdrivable Kinematically Redundant (6+3)-Degree-of-Freedom Hybrid Parallel Robot for Intuitive Sensorless Physical Human-Robot Interaction. IEEE. T. Robot. 2021, 37, 1222–1238. [Google Scholar] [CrossRef]
- Yoshikawa, T. Manipulability of robotic mechanisms. Int. J. Robot. Res. 1985, 4, 3–9. [Google Scholar] [CrossRef]
- Corke, P. Robotics, Vision and Control: Fundamental Algorithms in MATLAB; Springer: New York, NY, USA, 2011; pp. 176–179. [Google Scholar]
- Klein, C.A.; Blaho, B.E. Dexterity measures for the design and control of kinematically redundant manipulators. Int. J. Robot. Res. 1987, 6, 72–83. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | |||||
|---|---|---|---|---|---|
| 1 | 0 | 0.08 | |||
| 2 | 0 | 0.06 | |||
| 3 | 0 | 0 | 0 | ||
| 4 | 0 | 0 | |||
| 5 | 0 | 0 | |||
| 6 | 0 | 0 | 0.08 |
| i | |||||
|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | ||
| 2 | 0.02 | 0 | |||
| 3 | 0 | 0.05 | 0 | ||
| 4 | 0.05 | 0 | |||
| 5 | 0 | 0.1 | |||
| 6 | 0 | 0 | |||
| 7 | 0.02 | 0 |
| Joint Position | |||
|---|---|---|---|
| 0 | 0 | ||
| 0 | 0 | ||
| 0 | 0 | ||
| 0.00000027 | 0.000523 | 613,002 | |
| 0.00000000215 | 0.0000464 | 8,500,392 | |
| 0.0000000248 | 0.0001575 | 4,423,851 | |
| 0.00000000147 | 0.0000383 | 113,310,832 | |
| 0.0000000463 | 0.000215 | 2,410,219 | |
| 0.0000000324 | 0.00018 | 2,364,066 | |
| 0.0000000155 | 0.0001246 | 2,777,778 | |
| 0.000000001 | 0.0000314 | 20,703,933 | |
| 0.000000001 | 0.0000308 | 77,294,250 | |
| 0.0000002081 | 0.000456 | 705,496 |
| Joint Position | |||
|---|---|---|---|
| 0 | 0 | ||
| 0 | 0 | ||
| 0 | 0 | ||
| 0 | 0 |
| Manipulator Type | The Complexity of Determinant Transformation | Capable of Obtaining Singular Configurations | |
|---|---|---|---|
| Serial manipulators satisfying the Pieper criterion | No determinant transformation | No | Yes |
| Serial manipulators not satisfying the Pieper criterion | No determinant transformation | No | Yes |
| Parallel manipulators | No determinant transformation | No | Yes |
| Manipulator Type | The Complexity of Determinant Transformation | Capable of Obtaining Singular Configurations | |
|---|---|---|---|
| Serial manipulators satisfying the Pieper criterion | Average complexity | Yes | Yes |
| Serial manipulators not satisfying the Pieper criterion | Very complex | Yes | No |
| Parallel manipulators | Average complexity | Yes | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Fan, B.; Wang, C.; Cheng, X. Analysis of Singular Configuration of Robotic Manipulators. Electronics 2021, 10, 2189. https://doi.org/10.3390/electronics10182189
Zhang X, Fan B, Wang C, Cheng X. Analysis of Singular Configuration of Robotic Manipulators. Electronics. 2021; 10(18):2189. https://doi.org/10.3390/electronics10182189
Chicago/Turabian StyleZhang, Xinglei, Binghui Fan, Chuanjiang Wang, and Xiaolin Cheng. 2021. "Analysis of Singular Configuration of Robotic Manipulators" Electronics 10, no. 18: 2189. https://doi.org/10.3390/electronics10182189
APA StyleZhang, X., Fan, B., Wang, C., & Cheng, X. (2021). Analysis of Singular Configuration of Robotic Manipulators. Electronics, 10(18), 2189. https://doi.org/10.3390/electronics10182189