
UAVs Path Planning under a Bi-Objective Optimization Framework for Smart Cities




Abstract
1. Introduction
2. Mathematical Model
| N | the entire search region is divided into number of cells with equal area in the grid, |
| T | set of time intervals with equal length defining the time horizon to explore a grid, |
| R | number of UAVs, |
| probability of actual target occupancy on cell n | |
| state transition binary variable; , if the path of rth UAV investigates the nth cell in time period t, while , if that the corresponding cell is not visited | |
| a binary matrix representation of the infeasible maneuvers. That is, whenever | |
| a binary binary matrix representation of all cells through the time horizon representing the same location | |
| a binary matrix representation of the cells that can only be visited once | |
| a binary matrix representation of all maneuvers performed in the time period t | |
| a binary matrix representation of start and ending positions for UAV |
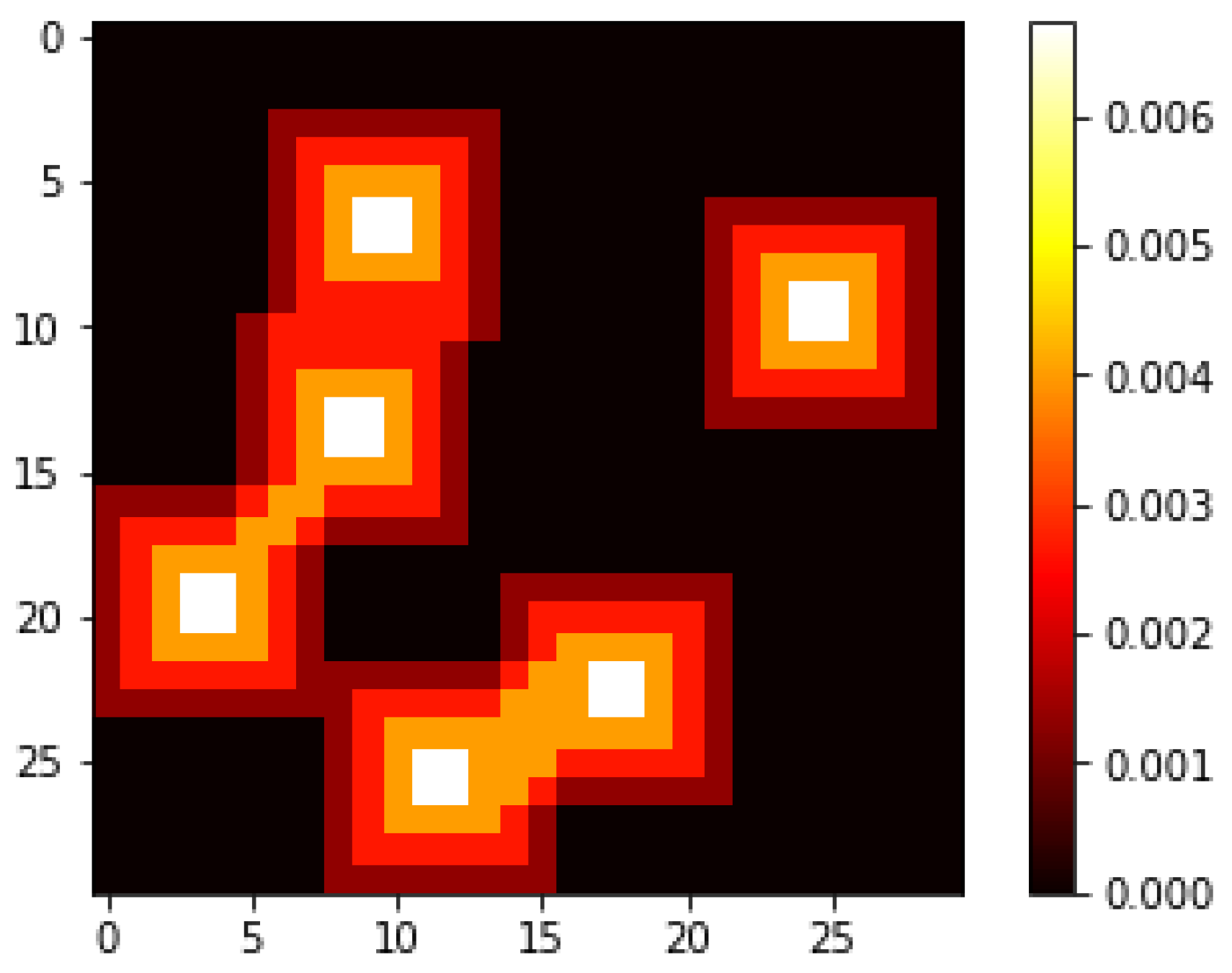
3. Scenario Generation
4. Solution Procedure
4.1. Transforming Multi-Objective Framework into a Single-Objective One
4.2. GLPK
4.3. Dijkstra’s Algorithm
4.4. Variable Neighborhood Search
- A local optimum relative to one neighborhood structure is not necessarily a local optimum for another neighborhood structure.
- A global optimum is a local optimum concerning all neighborhood structures.
- Empirical evidence shows that all or a large majority of the local optima are relatively close to each other for many problems.
| Algorithm 1: The path constructing algorithm: path_constructor(x_original, t1, t2, rs, score) |
 |
| Algorithm 2: Pseudocode representing VNS(score, N, R, T, neighborhood_size, nmax, kmax, tmax) |
 |
5. Experiments
5.1. Sensitivity of VNS Parameters
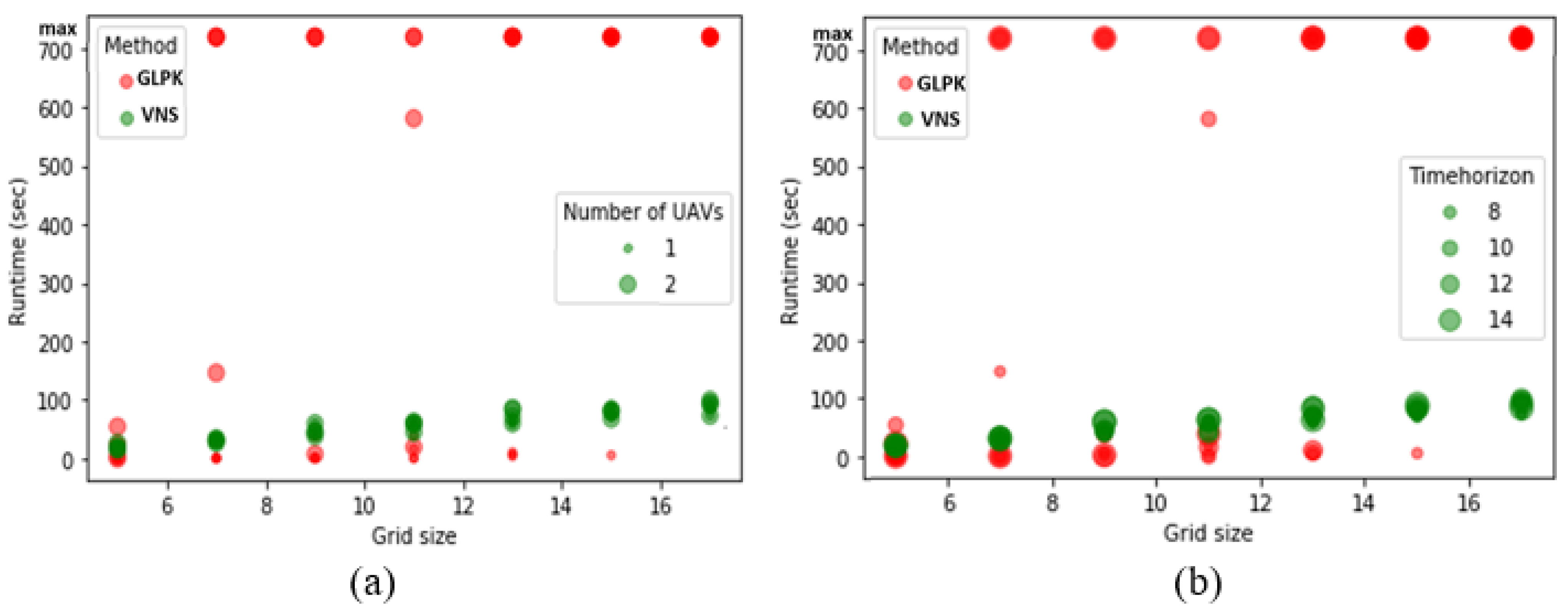
5.2. Performance and Runtime for VNS, Dijkstra, and GLPK
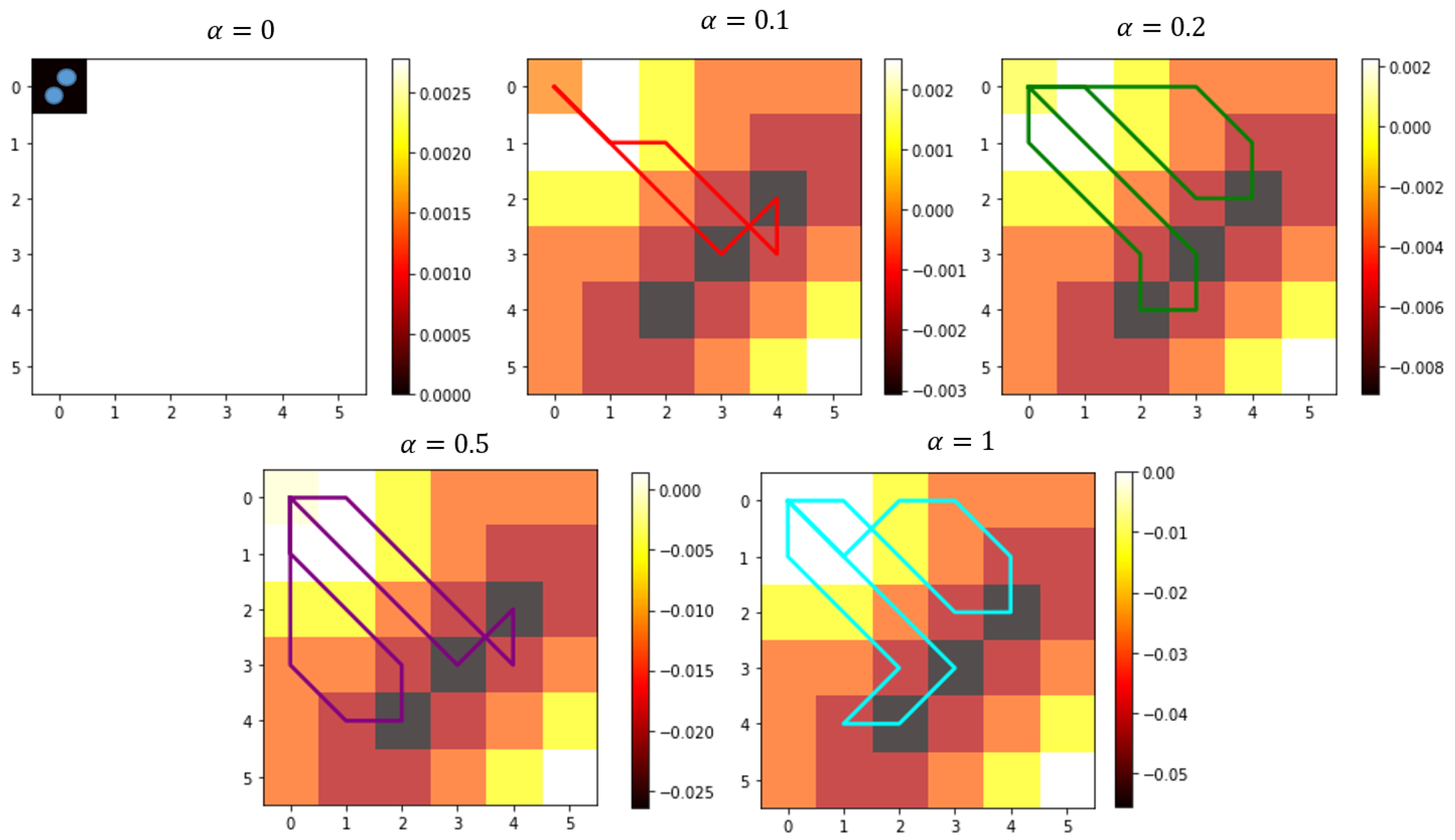
5.3. Sensitivity of Objective Weighting for the GLPK
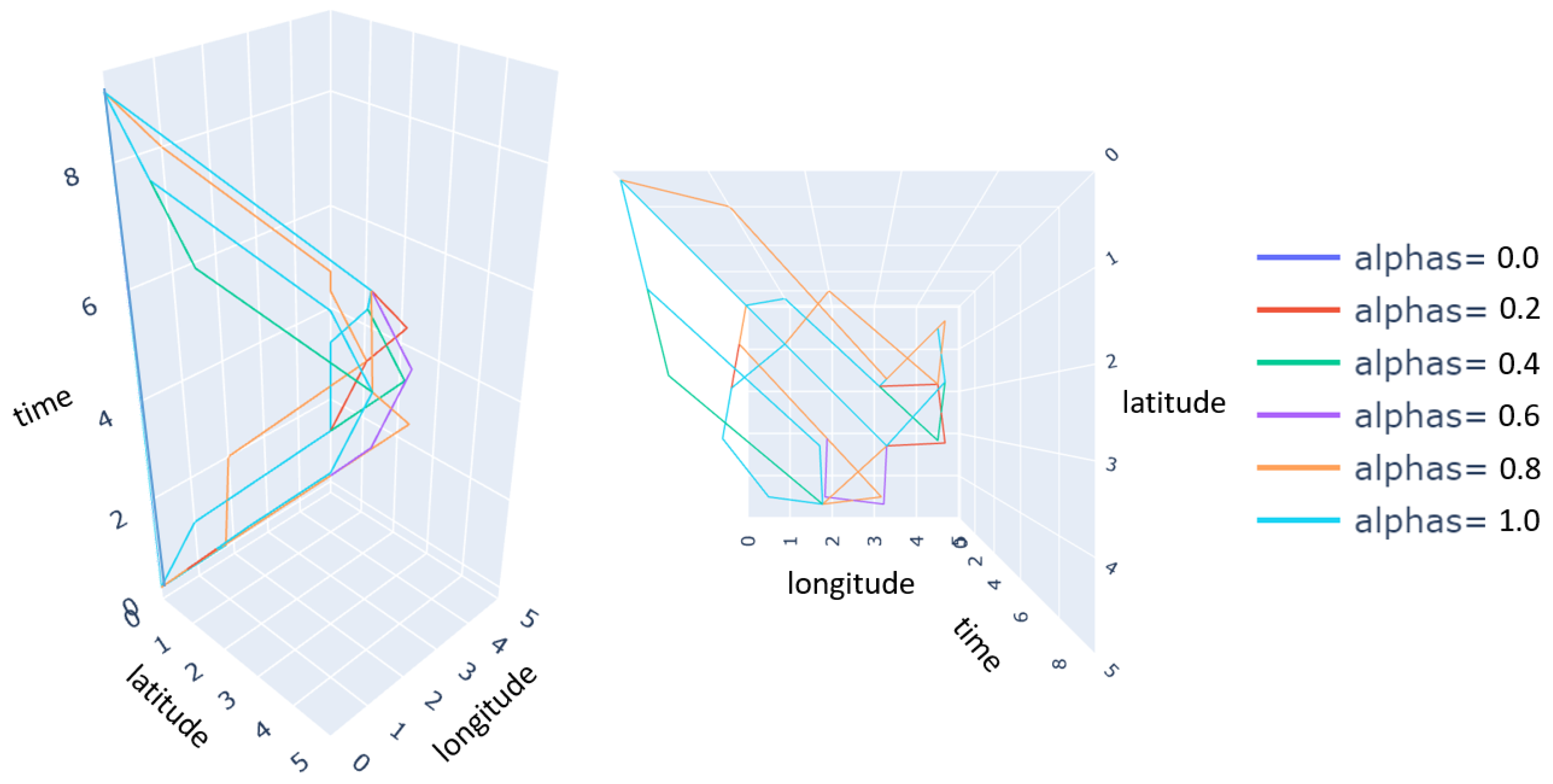
5.4. Benefits and Adverse Circumstances Associated with Multi-Objective Framework
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nielsen, I.E.; Dang, V.Q.; Nielsen, P.; Pawlewski, P. Scheduling of Mobile Robots with Preemptive Tasks, Advances in Intelligent Systems and Computing. In Distributed Computing and Artificial Intelligence, 11th International Conference; Springer: Berlin, Germany, 2014; pp. 19–29. [Google Scholar]
- Sung, I.; Nielsen, P. Zoning a service area of unmanned aerial vehicles for package delivery services. J. Intell. Robot. Syst. 2020, 97, 719–731. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Radzki, G.; Nielsen, P.; Banaszak, Z. UAV Mission planning resistant to weather uncertainty. Sensors 2020, 20, 515. [Google Scholar] [CrossRef]
- Eagle, J.N. 1984. The optimal search for a moving target when the search path is constrained. Oper. Res. 1984, 32, 1107–1115. [Google Scholar] [CrossRef]
- Pugliese, L.D.P.; Guerriero, F.; Zorbas, D.; Razafindralambo, T. Modelling the mobile target covering problem using flying drones. Optim. Lett. 2016, 10, 1021–1052. [Google Scholar] [CrossRef]
- Samaniego, F.; Sanchis, J.; García-Nieto, S.; Simarro, R. Recursive Rewarding Modified Adaptive Cell Decomposition (RR-MACD): A Dynamic Path Planning Algorithm for UAVs. Electronics 2019, 8, 306. [Google Scholar] [CrossRef]
- San Juan, V.; Santos, M.; Andújar, J.M. Intelligent UAV map generation and discrete path planning for search and rescue operations. Complexity 2018. [Google Scholar] [CrossRef]
- Stewart, T.J. Search for a moving target when searcher motion is restricted. Comput. Oper. Res. 1979, 6, 129–140. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C.; Han, Z.; Ren, Y.; Maunder, R.G.; Hanzo, L. Taking drones to the next level: Cooperative distributed unmanned-aerial-vehicular networks for small and mini drones. IEEE Veh. Technol. Mag. 2017, 12, 73–82. [Google Scholar] [CrossRef]
- Yuan, H.; Xiao, C.; Zhan, W.; Wang, Y.; Shi, C.; Ye, H.; Jiang, K.; Ye, Z.; Zhou, C.; Wen, Y. Target detection, positioning and tracking using new UAV gas sensor systems: Simulation and analysis. J. Intell. Robot. Syst. 2019, 94, 871–882. [Google Scholar] [CrossRef]
- Felemban, E.; Sheikh, A.A.; Naseer, A. Improving response time for crowd management in Hajj. Computers 2021, 4, 46. [Google Scholar] [CrossRef]
- Miyano, K.; Shinkuma, R.; Shiode, N.; Shiode, S.; Sato, T.; Oki, E. Multi-UAV allocation framework for predictive crime deterrence and data acquisition. Internet Things 2020, 11, 100205. [Google Scholar] [CrossRef]
- Huang, S.; Gui, J.; Wang, T.; Li, X. Joint Mobile Vehicle–UAV Scheme for Secure Data Collection in a Smart City. Ann. Telecommun. 2020, 1–22. Available online: https://www.researchgate.net/publication/344005230_Joint_mobile_vehicle-UAV_scheme_for_secure_data_collection_in_a_smart_city (accessed on 10 March 2021). [CrossRef]
- Trummel, K.E.; Weisinger, J.R. The complexity of the optimal searcher path problem. Oper. Res. 1986, 34, 324–327. [Google Scholar] [CrossRef]
- Brown, S.S. Optimal search for a moving target in discrete time and space. Oper. Res. 1980, 28, 1275–1289. [Google Scholar] [CrossRef]
- Benkoski, S.J.; Monticino, M.G.; Weisinger, J.R. A survey of the search theory literature. Nav. Res. Logist. 1991, 38, 469–494. [Google Scholar] [CrossRef]
- Washburn, A.R. Branch and bound methods for a search problem. Nav. Res. Logist. 1998, 45, 243–257. [Google Scholar] [CrossRef]
- Lau, H.; Huang, S.; Dissanayake, G. Optimal search for multiple targets in a built environment. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3740–3745. [Google Scholar]
- Lau, H.; Huang, S.; Dissanayake, G. Discounted mean bound for the optimal searcher path problem with non-uniform travel times. Eur. J. Oper. Res. 2008, 190, 383–397. [Google Scholar] [CrossRef]
- Rogge, J.A.; Aeyels, D. Multi-robot coverage to locate fixed and moving targets. In Proceedings of the 2009 IEEE Control Applications (CCA) & Intelligent Control (ISIC), St. Petersburg, Russia, 8–10 July 2009; pp. 902–907. [Google Scholar]
- Li, X.; Yao, H.; Wang, J.; Xu, X.; Jiang, C.; Hanzo, L. A near-optimal UAV-aided radio coverage strategy for dense urban areas. IEEE Trans. Veh. Technol. 2019, 68, 9098–9109. [Google Scholar] [CrossRef]
- Berger, J.; Lo, N. An innovative multi-agent search-and-rescue path planning approach. Comput. Oper. Res. 2015, 53, 4–31. [Google Scholar] [CrossRef]
- Perez-Carabaza, S.; Besada-Portas, E.; Lopez-Orozco, J.A.; Jesus, M. Ant colony optimization for multi-UAV minimum time search in uncertain domains. Appl. Soft Comput. 2018, 62, 789–806. [Google Scholar] [CrossRef]
- Ye, F.; Chen, J.; Tian, Y.; Jiang, T. Cooperative task assignment of a heterogeneous multi-UAV system using an adaptive genetic algorithm. Electronics 2020, 4, 687. [Google Scholar] [CrossRef]
- Lu, Y.; Ma, Y.; Wang, J.; Han, L. Task assignment of UAV swarm based on Wolf Pack algorithm. Appl. Sci. 2020, 23, 8335. [Google Scholar] [CrossRef]
- Luo, R.; Zheng, H.; Guo, J. Solving the multi-functional heterogeneous UAV cooperative mission planning problem using multi-swarm fruit fly optimization algorithm. Sensors 2020, 18, 5026. [Google Scholar] [CrossRef]
- Alhaqbani, A.; Kurdi, H.; Youcef-Toumi, K. Fish-inspired task allocation algorithm for multiple unmanned aerial vehicles in search and rescue missions. Remote Sens. 2021, 1, 27. [Google Scholar]
- Xiong, C.; Chen, D.; Lu, D.; Zeng, Z.; Lian, L. Path planning of multiple autonomous marine vehicles for adaptive sampling using Voronoi-based ant colony optimization. Robot. Auton. Syst. 2019, 115, 90–103. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C.; Zhang, H.; Ren, Y.; Chen, K.C.; Hanzo, L. Thirty years of machine learning: The road to Pareto-optimal wireless networks. IEEE Commun. Surv. Tutor. 2020, 22, 1472–1514. [Google Scholar] [CrossRef]
- Kundid Vasić, M.; Papić, V. Multimodel Deep Learning for Person Detection in Aerial Images. Electronics 2020, 9, 1459. [Google Scholar] [CrossRef]
- Li, Y.; Yuan, X.; Zhu, J.; Huang, H.; Wu, M. Multiobjective Scheduling of Logistics UAVs Based on Variable Neighborhood Search. Appl. Sci. 2020, 10, 3575. [Google Scholar] [CrossRef]
- Lo, N.; Berger, J.; Noel, M. Toward optimizing static target search path planning. In Proceedings of the 2012 IEEE Symposium on Computational Intelligence for Security and Defence Applications, Ottawa, ON, Canada, 11–13 July 2012; pp. 1–7. [Google Scholar]
- Nielsen, L.D.; Sung, I.; Nielsen, P. Convex decomposition for a coverage path planning for autonomous vehicles: Interior extension of edges. Sensors 2019, 19, 4165. [Google Scholar] [CrossRef]
- Perez-Carabaza, S.; Scherer, J.; Rinner, B.; López-Orozco, J.A.; Besada-Portas, E. UAV trajectory optimization for Minimum Time Search with communication constraints and collision avoidance. Eng. Appl. Artif. Intell. 2019, 85, 357–371. [Google Scholar] [CrossRef]
- Raap, M.; Meyer-Nieberg, S.; Pickl, S.; Zsifkovits, M. Aerial vehicle search-path optimization: A novel method for emergency operations. J. Optim. Theory Appl. 2017, 172, 965–983. [Google Scholar] [CrossRef]
- Sitek, P.; Wikarek, J.; Rutczyńska-Wdowiak, K.; Bocewicz, G.; Banaszak, Z. Optimization of capacitated vehicle routing problem with alternative delivery, pick-up and time windows: A modified hybrid approach. Neurocomputing 2021, 423, 670–678. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Zbigniew, B.; Nielsen, P. A solution approach for UAV fleet mission planning in changing weather conditions. Appl. Sci. 2019, 9, 3972. [Google Scholar] [CrossRef]
- Mladenovic, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]
- Loudni, S.; Boizumault, P.; David, P. On-line resources allocation for ATM networks with rerouting. Comput. Oper. Res. 2006, 33, 2891–2917. [Google Scholar] [CrossRef]
- Geiger, M.J.; Wenger, W. On the assignment of students to topics: A Variable Neighborhood Search approach. Socio-Econ. Plan. Sci. 2010, 44, 25–34. [Google Scholar] [CrossRef]
- Brusco, M.J.; Singh, R.; Steinley, D. Variable neighborhood search heuristics for selecting a subset of variables in principal component analysis. Psychometrics 2009, 74, 705. [Google Scholar] [CrossRef]
- Schilde, M.; Doerner, K.F.; Hartl, R.F.; Kiechle, G. Metaheuristics for the bi-objective orientation problem. Swarm Intell. 2009, 3, 179–201. [Google Scholar] [CrossRef]
- Anghinolfi, D.; Paolucci, M. Parallel machine total tardiness scheduling with a new hybrid metaheuristic approach. Comput. Oper. Res. 2007, 34, 3471–3490. [Google Scholar] [CrossRef]
- Qian, B.; Wang, L.; Huang, D.X.; Wang, X. Multi-objective flow shop scheduling using differential evolution. In Intelligent Computing in Signal Processing and Pattern Recognition; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1125–1136. [Google Scholar]
- Fleszar, K.; Osman, I.H.; Hindi, K.S. A variable neighborhood search algorithm for the open vehicle routing problem. Eur. J. Oper. Res. 2009, 195, 803–809. [Google Scholar] [CrossRef]
- Montemanni, R.; Smith, D.H. Construction of constant GC-content DNA codes via a variable neighborhood search algorithm. J. Math. Model. Algorithms 2008, 7, 311. [Google Scholar] [CrossRef]
- Hansen, P.; Mladenović, N.; Pérez, J.A.M. Variable neighborhood search: Methods and applications. Ann. Oper. Res. 2010, 175, 367–407. [Google Scholar] [CrossRef]
- Ribeiro, C.C.; Aloise, D.; Noronha, T.F.; Rocha, C.; Urrutia, S. An efficient implementation of a VNS/ILS heuristic for a real-life car sequencing problem. Eur. J. Oper. Res. 2008, 191, 596–611. [Google Scholar] [CrossRef]
- Gosiewski, Z.; Kwaśniewski, K. Time Minimization of Rescue Action Realized by an Autonomous Vehicle. Electronics 2020, 9, 2099. [Google Scholar] [CrossRef]
- Lanillos, P.; Yañez-Zuluaga, J.; Ruz, J.J.; Besada-Portas, E. A bayesian approach for constrained multi-agent minimum time search in uncertain dynamic domains. In Proceedings of the 15th Annual Conference on Genetic and Evolutionary Computation, Amsterdam, The Netherlands, 6–10 July 2013; pp. 391–398. [Google Scholar]
- Peng, Z.H.; Wu, J.P.; Chen, J. Three-dimensional multi-constraint route planning of unmanned aerial vehicle low-altitude penetration based on coevolutionary multi-agent genetic algorithm. J. Cent. South Univ. Technol. 2011, 18, 1502. [Google Scholar] [CrossRef]
- Sakawa, M.; Yano, H.; Nishizaki, I.; Nishizaki, I. Linear and Multiobjective Programming with Fuzzy Stochastic Extensions; Springer US: New York, NY, USA, 2013. [Google Scholar]
- Chen, L.; Peng, J.; Zhang, B. Uncertain goal programming models for bicriteria solid transportation problem. Appl. Soft Comput. 2017, 51, 49–59. [Google Scholar] [CrossRef]
- Chung, C.K.; Chen, H.M.; Chang, C.T.; Huang, H.L. On fuzzy multiple objective linear programming problems. Expert Syst. Appl. 2018, 114, 552–562. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Moon, I.; Jeong, Y.J.; Saha, S. Fuzzy bi-objective production-distribution planning problem under the carbon emission constraint. Sustainability 2016, 8, 798. [Google Scholar] [CrossRef]
- Davoodi, M.; Panahi, F.; Mohades, A.; Hashemi, S.N. Multi-objective path planning in discrete space. Appl. Soft Comput. 2013, 13, 709–720. [Google Scholar] [CrossRef]
- Yuan, Z.; Yang, Z.; Lv, L.; Shi, Y. A Bi-Level Path Planning Algorithm for Multi-AGV Routing Problem. Electronics 2020, 9, 1351. [Google Scholar] [CrossRef]
- Sathyaraj, B.M.; Jain, L.C.; Finn, A.; Drake, S. Multiple UAVs path planning algorithms: A comparative study. Fuzzy Optim. Decis. Mak. 2008, 7, 257. [Google Scholar] [CrossRef]
- Nielsen, I.E.; Bocewicz, G.; Saha, S. Multi-Agent Path Planning Problem Under a Multi-objective Optimization Framework. In DCAI 2020: Distributed Computing and Artificial Intelligence, Special Sessions, 17th International Conference, Proceedings of the International Symposium on Distributed Computing and Artificial Intelligence, L’Aquila, Italy, 17–19 June 2020; Springer: Cham, Switzerland, 2020; pp. 5–14. [Google Scholar]
- Wu, Y.K.; Liu, C.C.; Lur, Y.Y. Pareto-optimal solution for multiple objective linear programming problems with fuzzy goals. Fuzzy Optim. Decis. Mak. 2015, 14, 43–55. [Google Scholar] [CrossRef]
- Marler, R.T.; Arora, J.S. Survey of multi-objective optimization methods for engineering. Struct. Multidiscip. Optim. 2004, 26, 369–395. [Google Scholar] [CrossRef]
- Makhorin, A. GLPK (GNU Linear Programming Kit). 2008. Available online: http://www.gnu.org/s/glpk/glpk.html (accessed on 12 March 2019).
- Hidalgo-Paniagua, A.; Vega-Rodríguez, M.A.; Ferruz, J. Applying the MOVNS (multi-objective variable neighborhood search) algorithm to solve the path planning problem in mobile robotics. Expert Syst. Appl. 2016, 58, 20–35. [Google Scholar] [CrossRef]
- Jeong, Y.; Saha, S.; Chatterjee, D.; Moon, I. Direct shipping service routes with an empty container management strategy. Transp. Res. Part E Logist. Transp. Rev. 2018, 118, 123–142. [Google Scholar] [CrossRef]
- Saha, S.; Chatterjee, D.; Sarkar, B. The ramification of dynamic investment on the promotion and preservation technology for inventory management through a modified flower pollination algorithm. J. Retail. Consum. Serv. 2021, 58, 102326. [Google Scholar] [CrossRef]
- Vasegaard, A.E.; Picard, M.; Hennart, F.; Nielsen, P.; Saha, S. Multi criteria decision making for the multi-satellite image acquisition scheduling problem. Sensors 2020, 20, 1242. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Neighborhood Parameter | Relative Performance () | Standard Deviation () | Runtime (s) |
|---|---|---|---|
| 0.250 | 0.630 | 0.086 | 13.239 |
| 0.333 | 0.820 | 0.033 | 20.094 |
| 0.417 | 0.837 | 0.036 | 27.870 |
| 0.500 | 0.860 | 0.025 | 35.917 |
| 0.583 | 0.908 | 0.027 | 39.621 |
| 0.667 | 0.921 | 0.027 | 42.898 |
| 0.750 | 0.893 | 0.043 | 47.320 |
| 0.833 | 0.862 | 0.035 | 49.739 |
| Avg. Performance (Relative to GLPK) | Avg. Runtime (In Seconds) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| nmax\kmax | 5 | 15 | 25 | 35 | 45 | 55 | 5 | 15 | 25 | 35 | 45 | 55 |
| 50 | 0.778 | 0.844 | 0.847 | 0.865 | 0.907 | 0.889 | 1.279 | 3.634 | 6.006 | 8.895 | 10.885 | 13.773 |
| 100 | 0.777 | 0.865 | 0.889 | 0.885 | 0.885 | 0.847 | 2.335 | 7.114 | 11.527 | 16.675 | 22.014 | 26.318 |
| 150 | 0.931 | 0.890 | 0.870 | 0.931 | 0.950 | 0.933 | 3.662 | 11.177 | 16.975 | 24.241 | 32.656 | 37.795 |
| 200 | 0.926 | 0.931 | 0.843 | 0.823 | 0.864 | 0.912 | 5.356 | 14.136 | 23.159 | 32.099 | 42.245 | 54.182 |
| 250 | 0.867 | 0.779 | 0.911 | 0.933 | 0.891 | 0.865 | 6.185 | 16.359 | 28.851 | 39.850 | 55.093 | 62.888 |
| 500 | 0.932 | 0.867 | 0.913 | 0.911 | 0.869 | 0.975 | 12.262 | 33.660 | 59.775 | 87.177 | 102.260 | 126.429 |
| 1000 | 0.934 | 0.912 | 0.910 | 0.868 | 0.871 | 0.932 | 23.976 | 70.143 | 111.092 | 156.020 | 211.473 | 269.177 |
| 1500 | 0.886 | 0.846 | 0.928 | 0.928 | 0.867 | 0.913 | 32.441 | 103.338 | 171.001 | 248.853 | 323.948 | 360.003 |
| 2000 | 0.927 | 0.849 | 0.911 | 0.912 | 0.956 | 0.912 | 45.564 | 133.198 | 229.218 | 338.928 | 360.003 | 360.007 |
| 2500 | 0.869 | 0.976 | 0.911 | 0.912 | 0.974 | 0.912 | 61.237 | 175.410 | 298.774 | 360.004 | 360.002 | 360.002 |
| Grid Size | Time Horizon | No. of UAVs | Performance () | Relative Performance | |||
|---|---|---|---|---|---|---|---|
| N | T | R | VNS | Dijkstra | GLPK | ||
| 5 | 10 | 1 | 0.225 | 0.018 | 0.242 | 0.928 | 0.074 |
| 5 | 10 | 2 | 0.137 | 0.324 | 0.416 | 0.329 | 0.778 |
| 5 | 14 | 1 | 0.310 | 0.206 | 0.357 | 0.868 | 0.576 |
| 5 | 14 | 2 | 0.454 | 0.124 | 0.454 | 1.000 | 0.273 |
| 5 | 18 | 1 | 0.332 | 0.199 | 0.484 | 0.686 | 0.412 |
| 5 | 18 | 2 | 0.371 | 0.172 | 0.428 | 0.865 | 0.406 |
| 5 | 22 | 1 | 0.460 | 0.128 | 0.460 | 1.000 | 0.280 |
| 5 | 22 | 2 | 0.400 | 0.185 | 0.481 | 0.830 | 0.384 |
| 7 | 10 | 1 | 0.075 | 0.046 | 0.102 | 0.730 | 0.450 |
| 7 | 10 | 2 | 0.082 | 0.019 | 0.135 | 0.612 | 0.143 |
| 7 | 14 | 1 | 0.163 | 0.037 | 0.178 | 0.912 | 0.208 |
| 7 | 14 | 2 | 0.119 | 0.045 | 0.143 | 0.831 | 0.316 |
| 7 | 18 | 1 | 0.366 | 0.140 | 0.385 | 0.951 | 0.364 |
| 7 | 18 | 2 | 0.214 | 0.061 | - | - | - |
| 7 | 22 | 1 | 0.554 | 0.005 | 0.554 | 1.000 | 0.009 |
| 7 | 22 | 2 | 0.344 | 0.016 | - | - | - |
| 9 | 10 | 1 | 0.184 | 0.057 | 0.222 | 0.832 | 0.258 |
| 9 | 10 | 2 | 0.319 | 0.188 | 0.344 | 0.927 | 0.546 |
| 9 | 14 | 1 | 0.096 | 0.035 | 0.101 | 0.947 | 0.351 |
| 9 | 14 | 2 | 0.026 | 0.011 | - | - | - |
| 9 | 18 | 1 | 0.346 | 0.244 | 0.371 | 0.932 | 0.656 |
| 9 | 18 | 2 | 0.431 | 0.003 | - | - | - |
| 9 | 22 | 1 | 0.446 | 0.237 | 0.496 | 0.899 | 0.479 |
| 9 | 22 | 2 | 0.458 | 0.300 | - | - | - |
| 11 | 10 | 1 | 0.185 | 0.007 | 0.185 | 1.000 | 0.042 |
| 11 | 10 | 2 | 0.283 | 0.099 | 0.296 | 0.958 | 0.336 |
| 11 | 14 | 1 | 0.273 | 0.042 | 0.297 | 0.916 | 0.141 |
| 11 | 14 | 2 | 0.408 | 0.162 | 0.427 | 0.955 | 0.380 |
| 11 | 18 | 1 | 0.242 | 0.029 | 0.297 | 0.812 | 0.098 |
| 11 | 18 | 2 | 0.272 | 0.003 | - | - | - |
| 11 | 22 | 1 | 0.447 | 0.191 | 0.447 | 0.999 | 0.428 |
| 11 | 22 | 2 | 0.545 | 0.002 | - | - | - |
| 13 | 10 | 1 | 0.097 | 0.056 | 0.111 | 0.876 | 0.504 |
| 13 | 10 | 2 | 0.110 | 0.027 | - | - | - |
| 13 | 14 | 1 | 0.223 | 0.068 | 0.248 | 0.899 | 0.273 |
| 13 | 14 | 2 | 0.347 | 0.274 | - | - | - |
| 13 | 18 | 1 | 0.348 | 0.002 | 0.348 | 1.000 | 0.008 |
| 13 | 18 | 2 | 0.522 | 0.005 | - | - | - |
| 13 | 22 | 1 | 0.373 | 0.089 | - | - | - |
| 13 | 22 | 2 | 0.547 | 0.047 | - | - | - |
| 15 | 10 | 1 | 0.111 | 0.042 | 0.111 | 0.999 | 0.384 |
| 15 | 10 | 2 | 0.085 | 0.028 | - | - | - |
| 15 | 14 | 1 | 0.095 | 0.009 | |||
| 15 | 14 | 2 | 0.039 | 0.028 | - | - | - |
| 15 | 18 | 1 | 0.072 | 0.043 | - | - | - |
| 15 | 18 | 2 | 0.112 | 0.039 | - | - | - |
| 15 | 22 | 1 | 0.092 | 0.004 | - | - | - |
| 15 | 22 | 2 | 0.107 | 0.031 | - | - | - |
| 17 | 10 | 1 | 0.010 | 0.008 | |||
| 17 | 10 | 2 | 0.024 | 0.081 | - | - | - |
| 17 | 14 | 1 | 0.492 | 0.068 | - | - | - |
| 17 | 14 | 2 | 0.573 | 0.355 | - | - | - |
| 17 | 18 | 1 | 0.372 | 0.163 | - | - | - - |
| 17 | 18 | 2 | 0.448 | 0.003 | - | - | - |
| 17 | 22 | 1 | 0.249 | 0.001 | - | - | - |
| 17 | 22 | 2 | 0.141 | 0.033 | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saha, S.; Vasegaard, A.E.; Nielsen, I.; Hapka, A.; Budzisz, H. UAVs Path Planning under a Bi-Objective Optimization Framework for Smart Cities. Electronics 2021, 10, 1193. https://doi.org/10.3390/electronics10101193
Saha S, Vasegaard AE, Nielsen I, Hapka A, Budzisz H. UAVs Path Planning under a Bi-Objective Optimization Framework for Smart Cities. Electronics. 2021; 10(10):1193. https://doi.org/10.3390/electronics10101193
Chicago/Turabian StyleSaha, Subrata, Alex Elkjær Vasegaard, Izabela Nielsen, Aneta Hapka, and Henryk Budzisz. 2021. "UAVs Path Planning under a Bi-Objective Optimization Framework for Smart Cities" Electronics 10, no. 10: 1193. https://doi.org/10.3390/electronics10101193
APA StyleSaha, S., Vasegaard, A. E., Nielsen, I., Hapka, A., & Budzisz, H. (2021). UAVs Path Planning under a Bi-Objective Optimization Framework for Smart Cities. Electronics, 10(10), 1193. https://doi.org/10.3390/electronics10101193