Historical Penetration Patterns of Automobile Electronic Control Systems and Implications for Critical Raw Materials Recycling


Abstract

1. Introduction
- What are typical penetration patterns of car ECS over time?
- What are the car characteristics correlating with the presence of car ECS in different car types?
- What are the implications of the past trends in ECS penetration for the future recycling of car electronics?
2. Materials and Methods
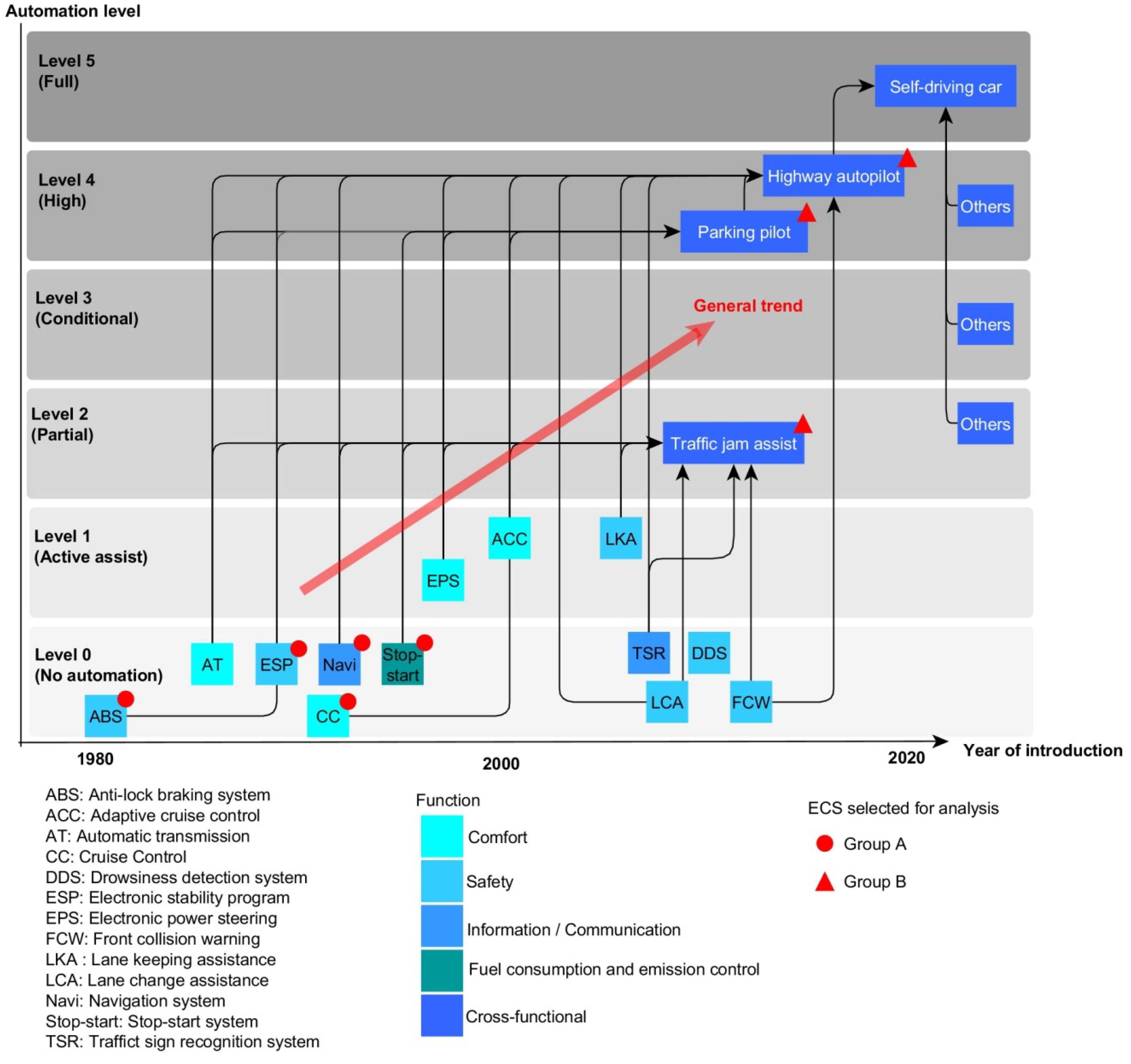
2.1. Selection of Automobile Electronic Control Systems to Consider in This Study
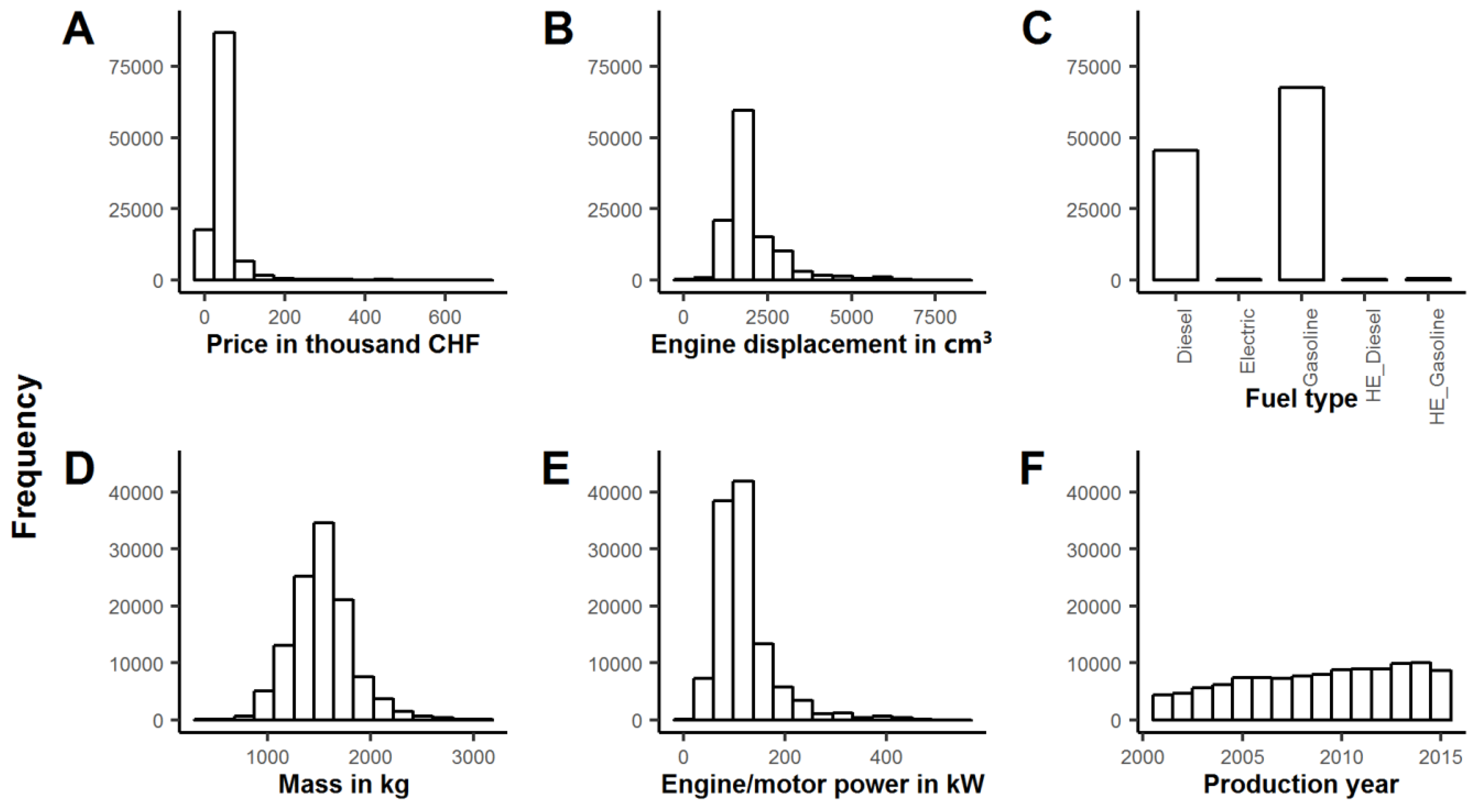
2.2. Data Set
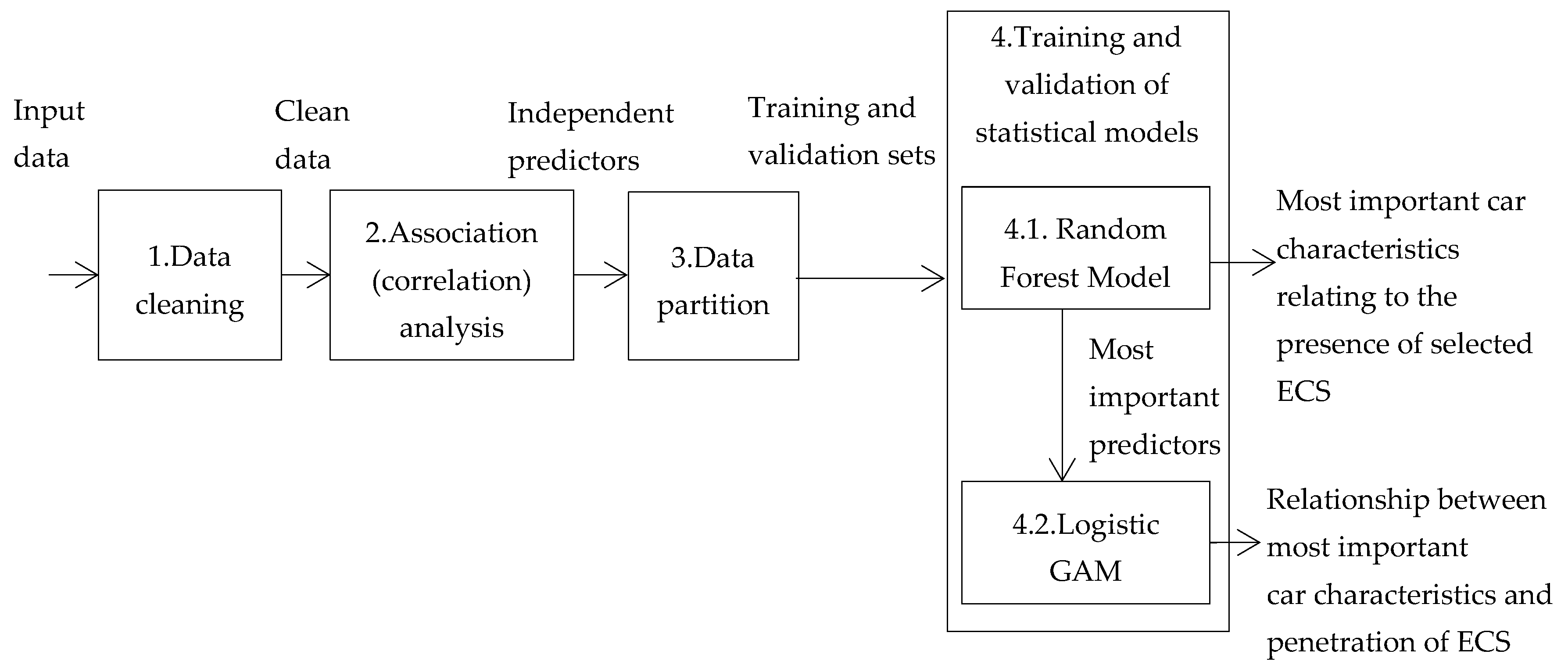
2.3. Analysis of Historical Trends and Indicators for the Use of Automobile Electronic Control Systems
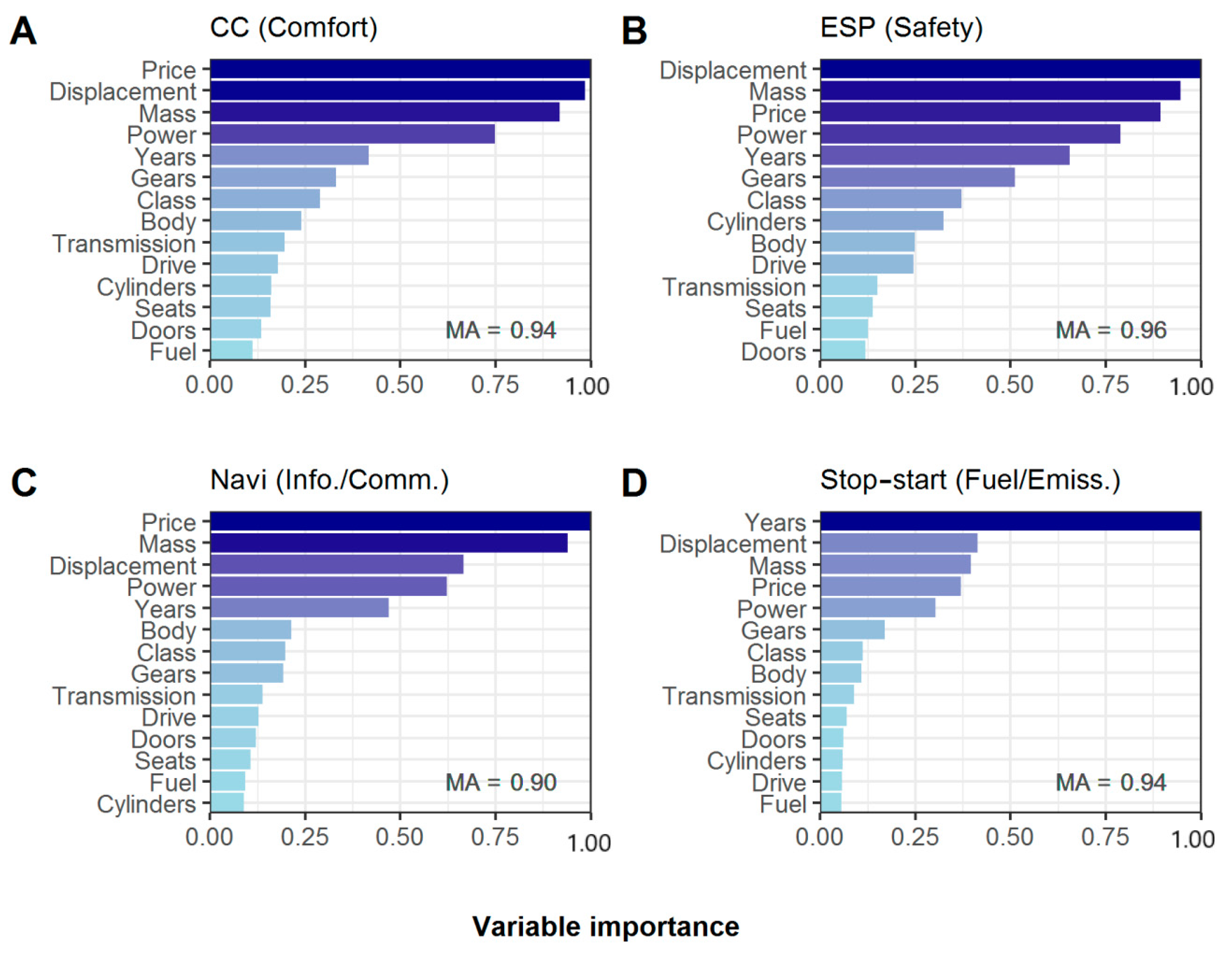
2.3.1. Random Forest Model for Identifying the Indicators for the Use of ECS in Cars
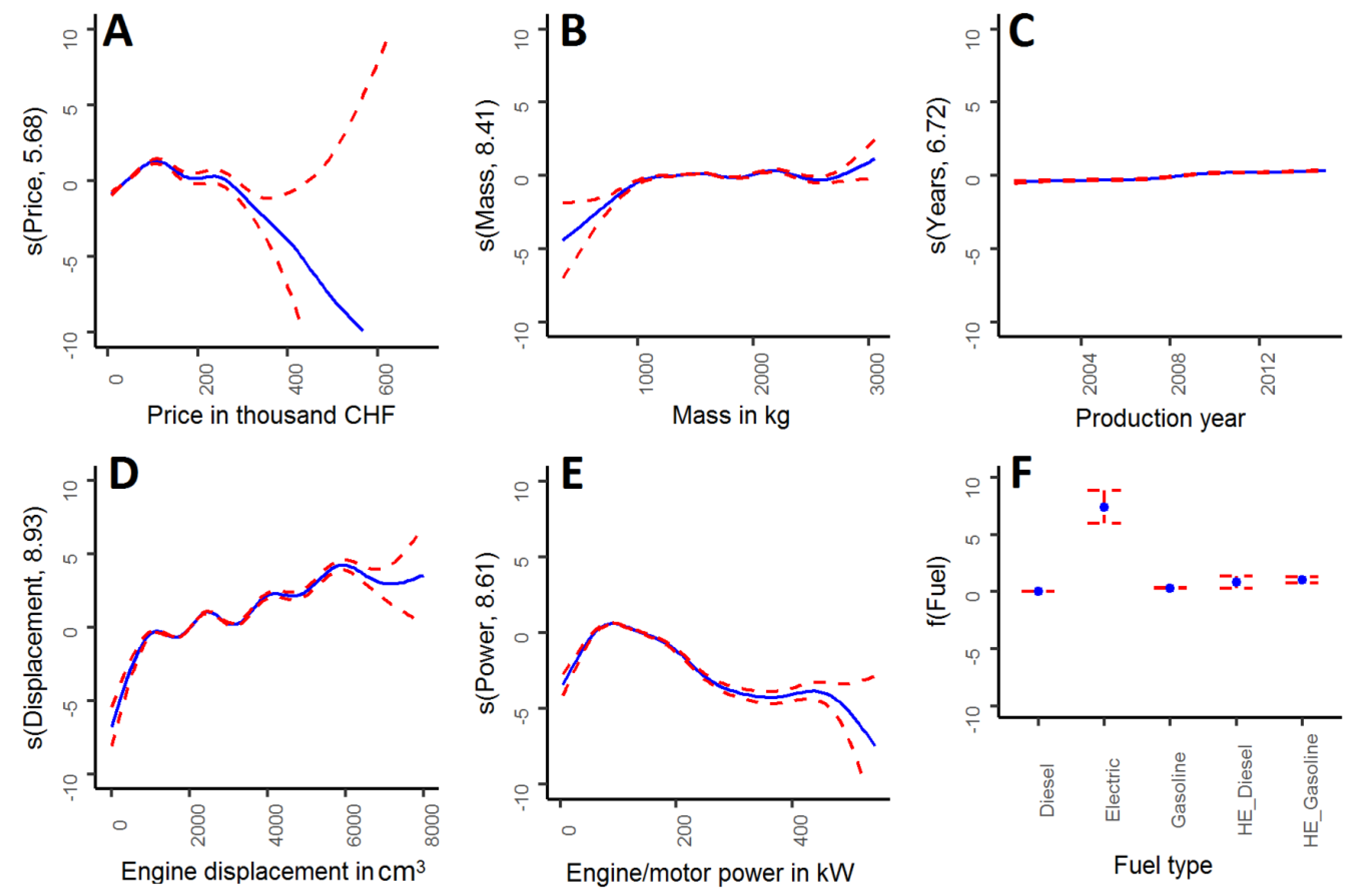
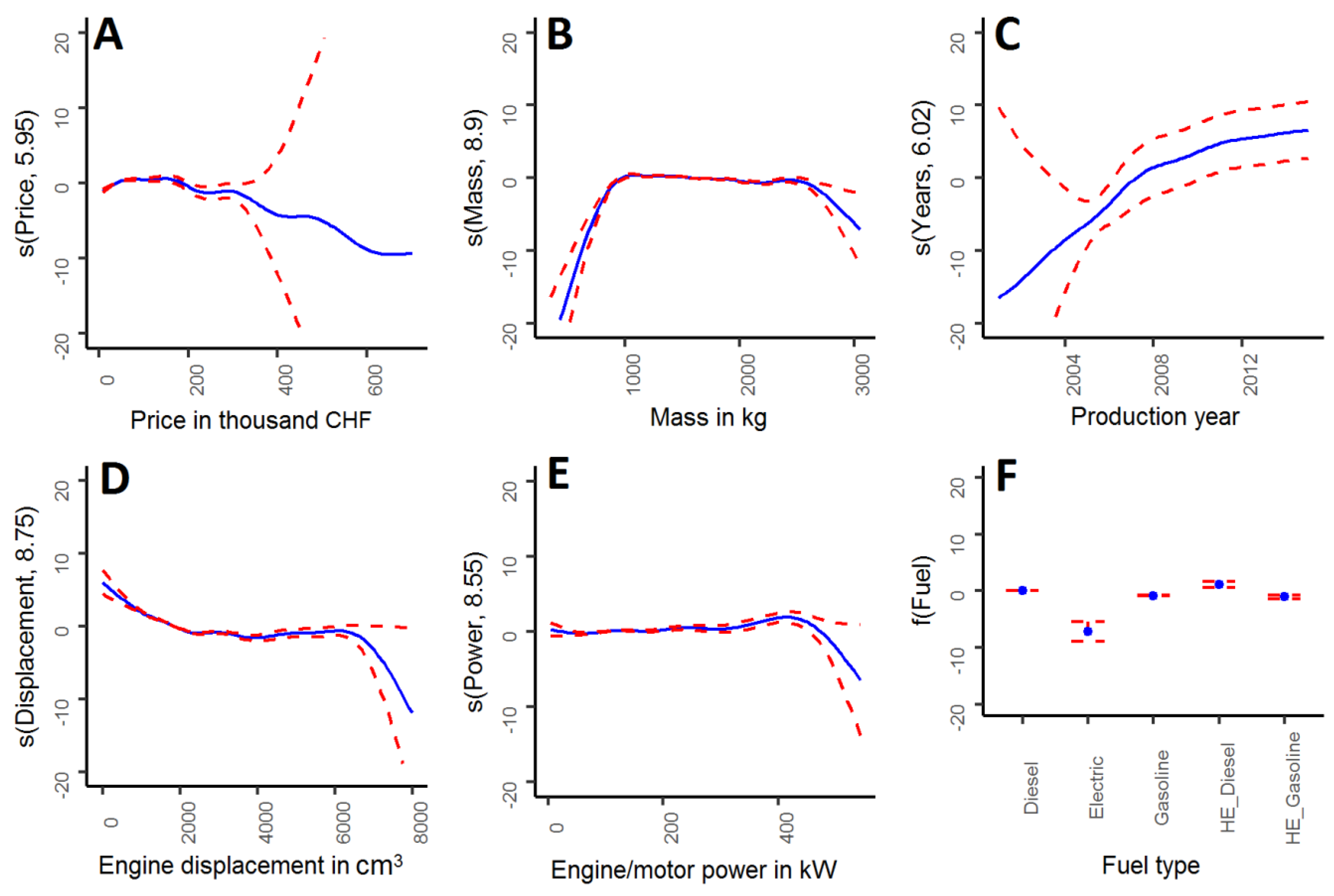
2.3.2. Logistic Generalized Additive Model (GAM) for Examining the Relationship Between the Indicator Characteristics and the Penetration of ECS
3. Results and Discussion
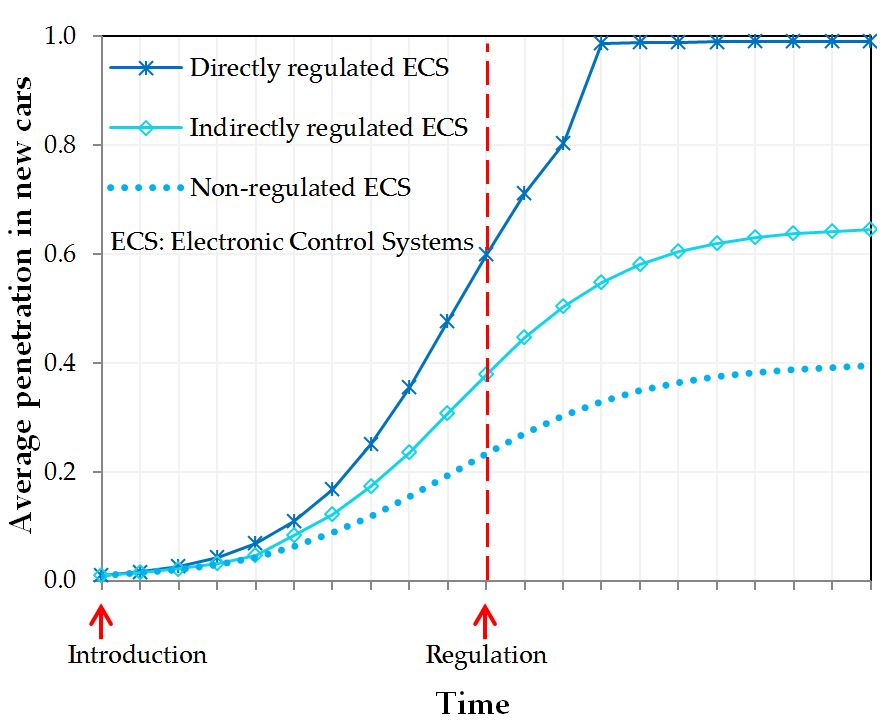
3.1. Historical Trends in Penetration of Automobile Electronic Control Systems (ECS)
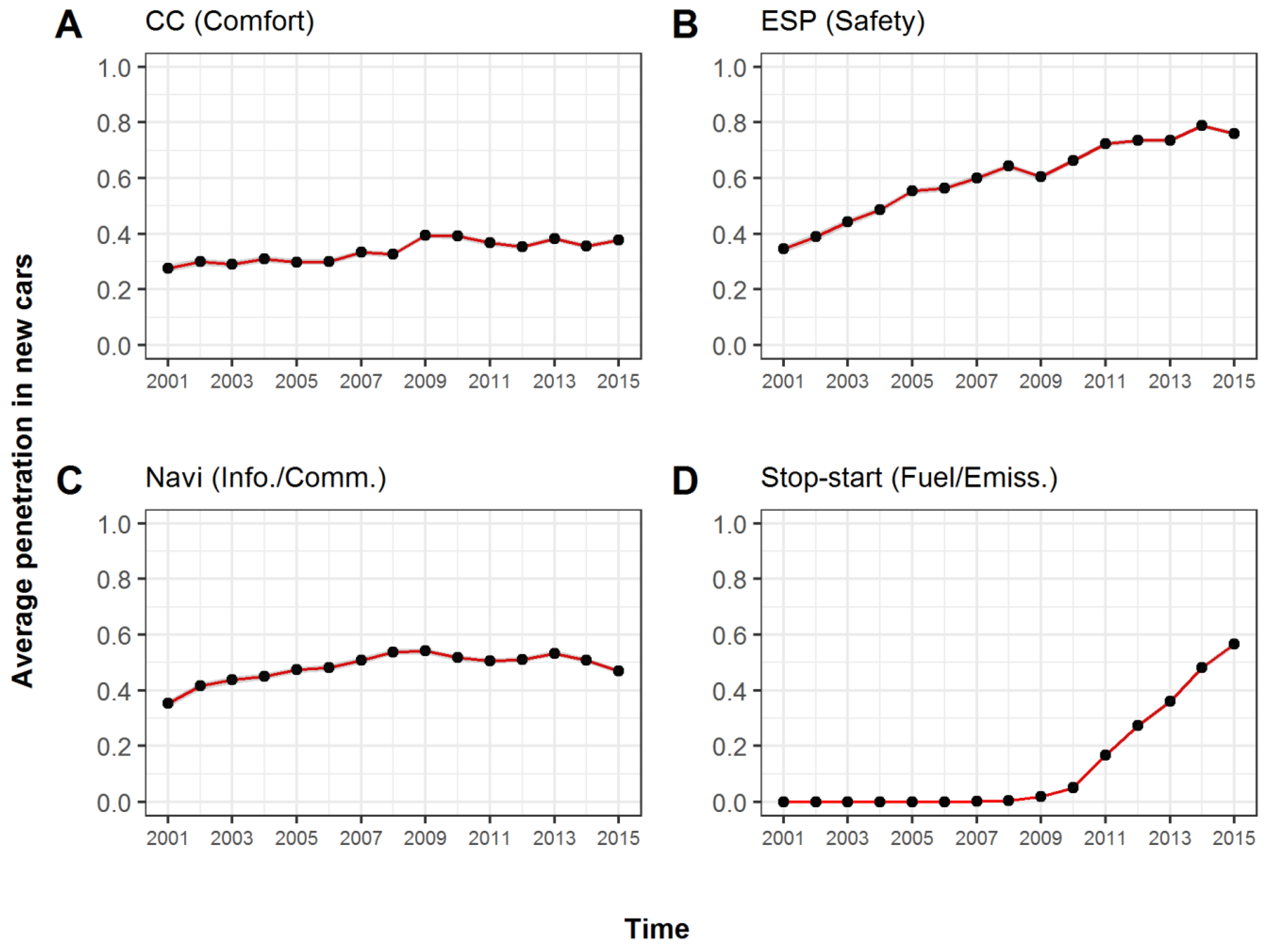
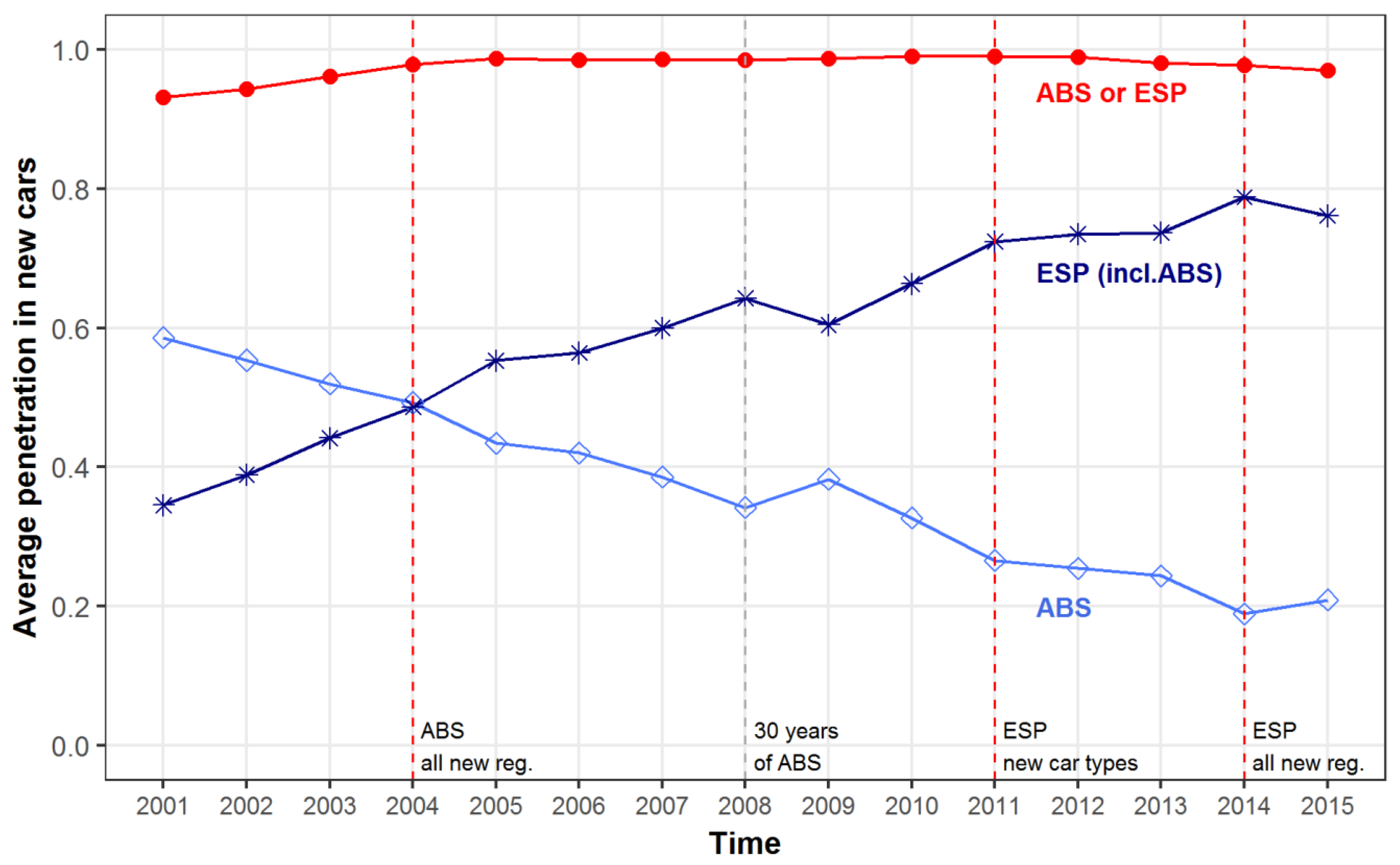
3.1.1. Established ECS
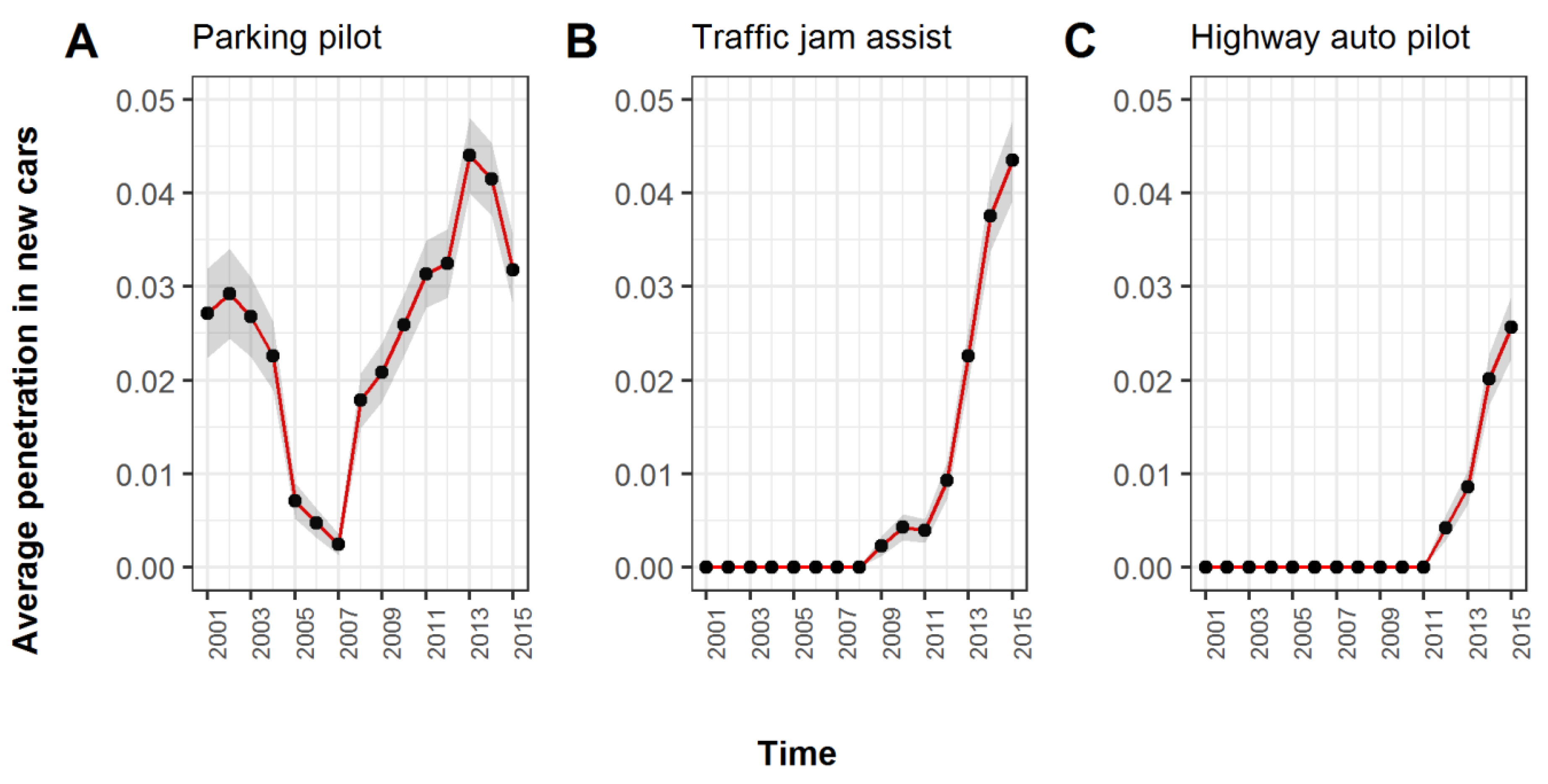
3.1.2. Emerging ECS
3.1.3. ECS Integration
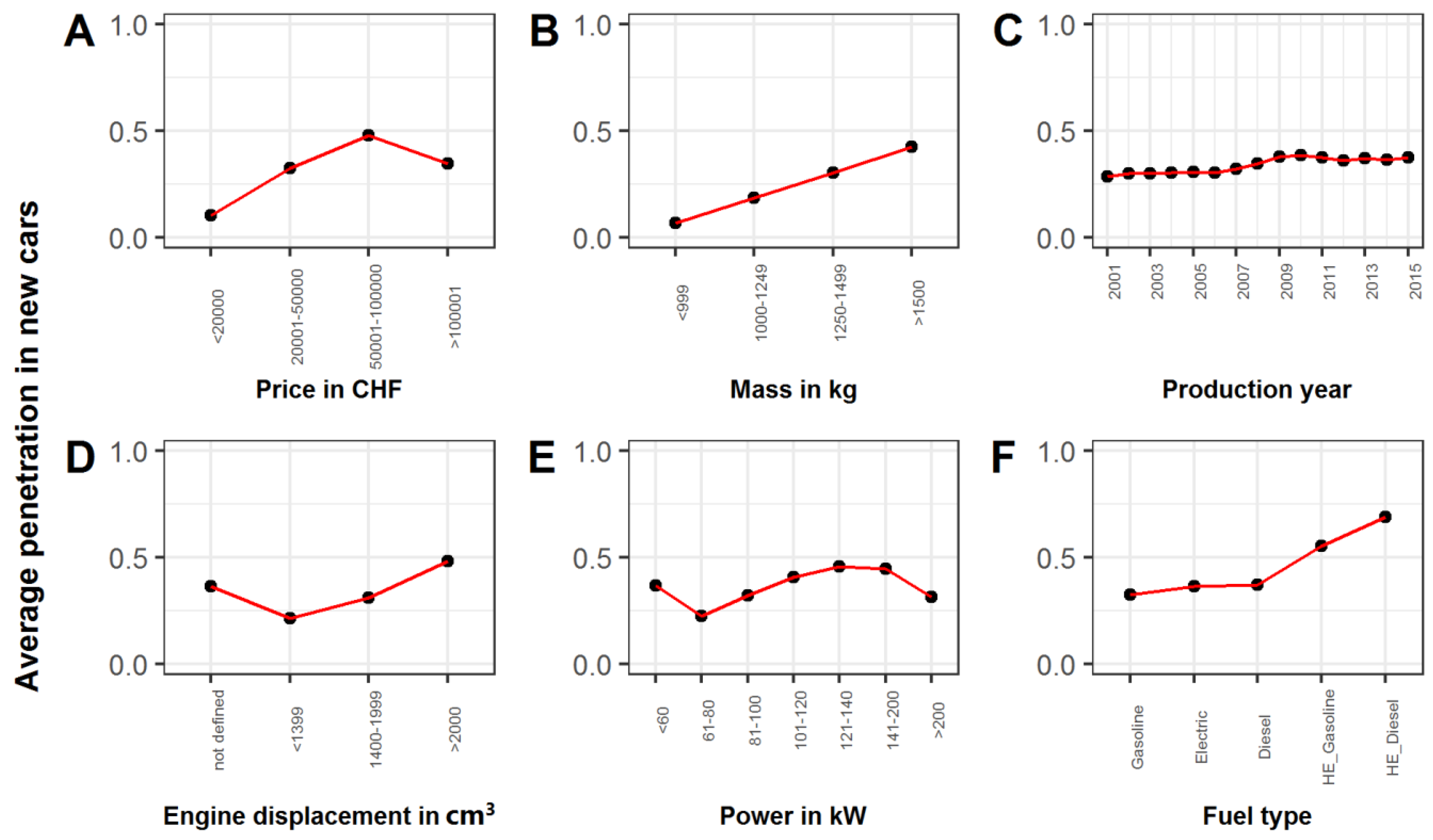
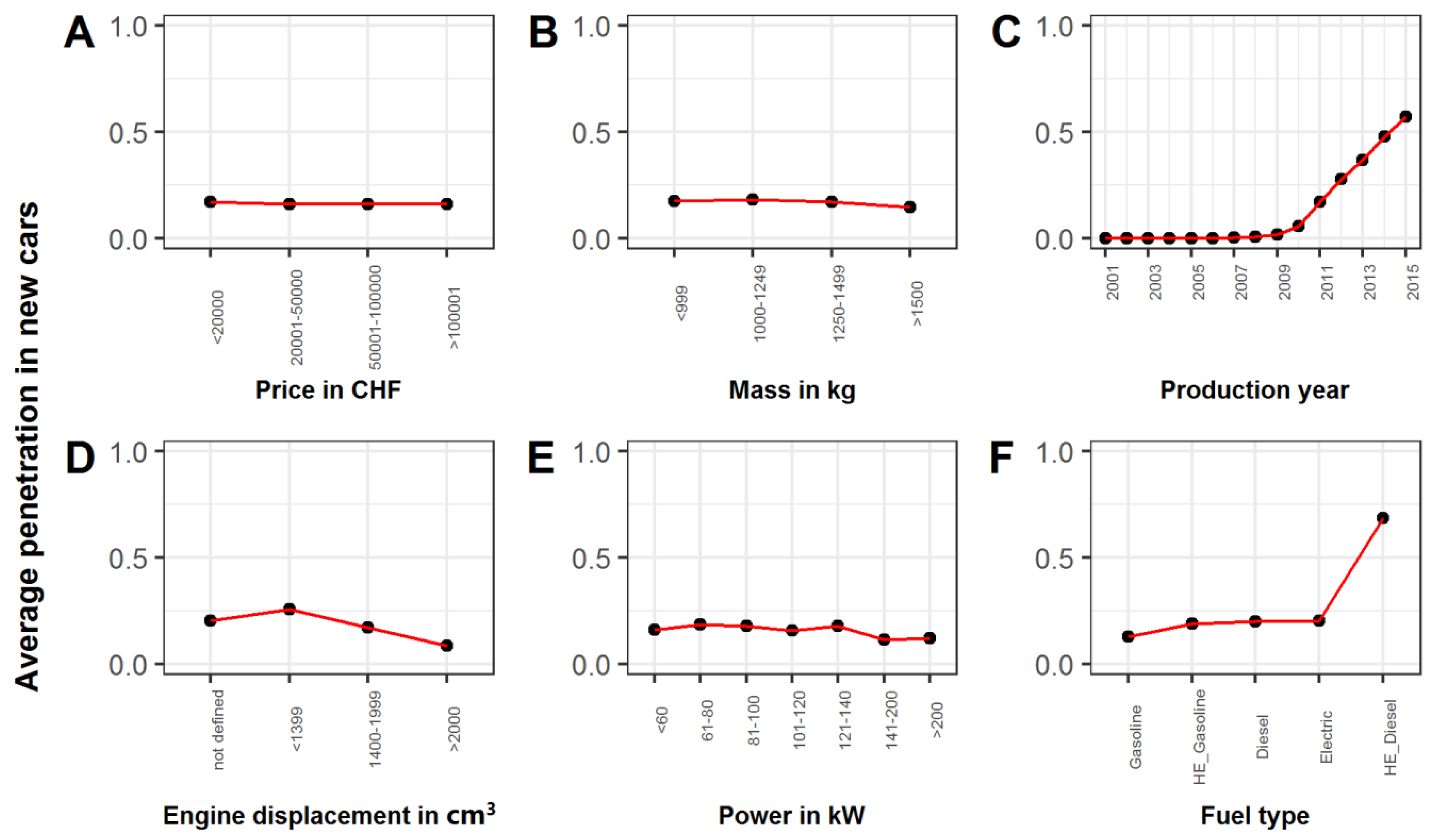
3.2. Indicators for the Historical Use of Automobile ECS
- Comfort-related ECS, as well as ECS related to information, communication, and entertainment, tend to remain below 50% for more than 10 years as long as under reasonable implementation costs no significant safety or environmental benefits are provided.
- Safety-related ECS can be expected to grow rapidly to approach 100% penetration within two to five years of implementation of the regulation.
- Fuel efficiency- and environmental emission-related ECS tend to grow rapidly after the implementation of the regulation. The saturation level seems to depend on the benefits of the ECS for achieving the specific standards for different car types.
3.3. Autonomous Cars and Other Trends in the Automobile Sector
3.4. Implications for Critical Raw Material (CRM) Content in Cars
3.5. Implications for Policy on Car Electronics Dismantling
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ABS | Anti-lock braking system |
| CC | Cruise control |
| CI | Confidence interval |
| CRM | Critical raw material |
| EC | European Commission |
| ECU | Electronic control unit |
| ELV | End-of-life vehicle |
| ESP | Electronic stability program |
| GAM | Generalized additive model |
| HE | Hybrid electric |
| ICE | Internal combustion engine |
| Navi | Navigation system |
| SAE | Society of automotive engineers |
| SI | Supplementary information |
| Stop-start | Stop-start system |
| TCS | Traction control system |
| VIM | Variable importance measure |
References
- Sander, K.; Kaerger, W.; Groke, M.; Bergamos, M.; Kohlmeyer, R. Separation of Components and Materials from End-Of-Life Vehicles Aiming at the Recovery of Critical Metals. In Proceedings of the 4th International Conference on Industrial and Hazardous Waste Management, Crete, Greece, 13–17 July 2014. [Google Scholar]
- Sander, K.; Wagner, L.; Sanden, J.; Wilts, H. Development of Proposals, Including Legal Instruments, to Improve the Data Situation on the Whereabouts of End-of-Life Vehicles; German Environmental Agency (UBA): Dessau-Roßlau, Germany, 2017. [Google Scholar]
- Andersson, M.; Söderman, M.L.; Sandén, B.A. Are scarce metals in cars functionally recycled? Waste Manag. 2017, 60, 407–416. [Google Scholar] [CrossRef] [PubMed]
- Cullbrand, K.; Magnusson, O. The Use of Potentially Critical Materials in Passenger Cars; Chalmers University of Technology: Gothenburg, Sweden, 2012. [Google Scholar]
- Alonso, E.; Wallington, T.; Sherman, A.; Everson, M.; Field, F.; Roth, R.; Kirchain, R. An Assessment of the Rare Earth Element Content of Conventional and Electric Vehicles. SAE Int. J. Mater. Manuf. 2012, 5, 473–477. [Google Scholar] [CrossRef]
- Du, X.; Restrepo, E.; Widmer, R.; Wäger, P. Quantifying the distribution of critical metals in conventional passenger vehicles using input-driven and output-driven approaches: A comparative study. J. Mater. Cycles Waste Manag. 2015, 17, 218–228. [Google Scholar] [CrossRef]
- Xu, G.; Yano, J.; Sakai, S. Scenario analysis for recovery of rare earth elements from end-of-life vehicles. J. Mater. Cycles Waste Manag. 2016, 18, 469–482. [Google Scholar] [CrossRef]
- Restrepo, E.; Løvik, A.N.; Wäger, P.; Widmer, R.; Lonka, R.; Müller, D.B. Stocks, Flows, and Distribution of Critical Metals in Embedded Electronics in Passenger Vehicles. Environ. Sci. Technol. 2017, 51, 1129–1139. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Yano, J.; Sakai, S. Recycling Potentials of Precious Metals from End-of-Life Vehicle Parts by Selective Dismantling. Environ. Sci. Technol. 2018, 53, 733–742. [Google Scholar] [CrossRef] [PubMed]
- Widmer, R.; Du, X.; Haag, O.; Restrepo, E.; Wäger, P. Scarce Metals in Conventional Passenger Vehicles and End-of-Life Vehicle Shredder Output. Environ. Sci. Technol. 2015, 49, 4591–4599. [Google Scholar] [CrossRef] [PubMed]
- Huisman, J.; Leroy, P.; Tertre, F.; Ljunggren Söderman, M.; Chancerel, P.; Cassard, D.; Løvik, A.N.; Wäger, P.; Kushnir, D.; Rotter, V.S.; et al. Prospecting Secondary Raw Materials in the Urban Mine and Mining Wastes (ProSUM)—Final Report; ProSUM Consortium: Brussels, Belgium, 2017; ISBN 978-92-808-9060-0 (print); 978-92-808-9061-7 (electronic). [Google Scholar]
- Field, F.R.; Wallington, T.J.; Everson, M.; Kirchain, R.E. Strategic Materials in the Automobile: A Comprehensive Assessment of Strategic and Minor Metals Use in Passenger Cars and Light Trucks. Environ. Sci. Technol. 2017, 51, 14436–14444. [Google Scholar] [CrossRef] [PubMed]
- Ortego, A.; Valero, A.; Valero, A.; Restrepo, E. Vehicles and Critical Raw Materials: A Sustainability Assessment Using Thermodynamic Rarity: Vehicles and Critical Raw Materials. J. Ind. Ecol. 2018, 22, 1005–1015. [Google Scholar] [CrossRef]
- Fishman, T.; Myers, R.; Rios, O.; Graedel, T.E. Implications of Emerging Vehicle Technologies on Rare Earth Supply and Demand in the United States. Resources 2018, 7, 9. [Google Scholar] [CrossRef]
- Seo, Y.; Morimoto, S. Analyzing Platinum and Palladium Consumption and Demand Forecast in Japan. Resources 2017, 6, 61. [Google Scholar] [CrossRef]
- Nguyen, R.T.; Imholte, D.D.; Matthews, A.C.; Swank, W.D. NdFeB content in ancillary motors of U.S. conventional passenger cars and light trucks: Results from the field. Waste Manag. 2019, 83, 209–217. [Google Scholar] [CrossRef] [PubMed]
- European Commission. Report on Critical Raw Materials for the EU; European Commission: Brussels, Belgium, 2014. [Google Scholar]
- Sebag, R. Global Gold Mine Deposit Rankings; Natural Resource Holdings: Vancouver, BC, Canada, 2013. [Google Scholar]
- Swiss Federal Office for the Environment (FOEN). Revision der Verordnung über die Rückgabe, die Rücknahme und die Entsorgung Elektrischer und Elektronischer Geräte (VREG, SR 814.620); FOEN: Ittigen, Switzerland, 2013. [Google Scholar]
- Robert Bosch GmbH. Bosch Automotive Electrics and Automotive Electronics; Robert Bosch GmbH, Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2014. [Google Scholar]
- ProSUM Project. Urban Mine Platform. 2019. Available online: http://www.urbanmineplatform.eu/homepage (accessed on 11 February 2019).
- Downes, S.; Huisman, J.; Leroy, P.; Ljunggren Söderman, M.; Kushnir, D.; Løvik, A.N.; Wäger, P.; Rotter, V.S.; Mählitz, P.; Chancerel, P.; et al. Secondary Raw Materials in the Urban Mine and mining wastes (ProSUM) Recommendations Report; ProSUM Consortium: Brussels, Belgium, 2017. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An introduction to Statistical Learning—With Applications in R; Springer: Heidelberg, Germany, 2013. [Google Scholar]
- SAE. Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems; Society of Automotive Engineers (SAE): Troy, MI, USA, 2014. [Google Scholar]
- Auto-i-Dat AG. Autohandel Database; Auto-i-Dat AG: Zurich, Switzerland, 2015. [Google Scholar]
- Contestabile, M.; Offer, G.J.; Slade, R.; Jaeger, F.; Thoennes, M. Battery electric vehicles, hydrogen fuel cells and biofuels. Which will be the winner? Energy Environ. Sci. 2011, 4, 3754. [Google Scholar] [CrossRef]
- Team, R.C. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2018. [Google Scholar]
- Pearson, R. GoodmanKruskal: Association Analysis for Categorical Variables. R Package Version 0.0.2. Available online: https://CRAN.R-project.org/package=GoodmanKruskal (accessed on 30 March 2019).
- Wei, P.; Lu, Z.; Song, J. Variable importance analysis: A comprehensive review. Reliab. Eng. Syst. Saf. 2015, 142, 399–432. [Google Scholar] [CrossRef]
- Varney, V. The Evolution of Cruise Control. Available online: https://360.here.com/the-evolution-of-cruise-control (accessed on 27 February 2019).
- Toyota Corporation. Technical Development of Electronics Parts—Toyota. 2012. Available online: http://www.toyota-global.com/company/history_of_toyota/75years/data/automotive_business/products_technology/technology_development/electronics_parts/index.html (accessed on 31 January 2019).
- European Parliament and The Council. Regulation (EC) No 661/2009 of the European Parliament and of the Council of 13 July 2009 Concerning Type-Approval Requirements for the General Safety of Motor Vehicles, Their Trailers and Systems, Components and Separate Technical Units Intended Therefor; European Parliament and The Council: Brussels, Belgium, 2009. [Google Scholar]
- Akerman, J.R. Cartographies of Travel and Navigation; University of Chicago Press: Chicago, IL. USA, 2010. [Google Scholar]
- European Parliament and The Council. Regulation (EC) No 764/2008 of the European Parliament and of the Council of 20 June 2007 on Type Approval of Motor Vehicles with Respect to Emissions from Light Passenger and Commercial Vehicles (Euro 5 and Euro 6) and on Access to Vehicle Repair and Maintenance Information; European Parliament and The Council: Brussels, Belgium, 2009. [Google Scholar]
- Fonseca, N.; Casanova, J.; Valdés, M. Influence of the stop/start system on CO2 emissions of a diesel vehicle in urban traffic. Transp. Res. Part Transp. Environ. 2011, 16, 194–200. [Google Scholar] [CrossRef]
- Deutsche Automobil Treuhand GmbH (DAT). DAT Reports 2001–2015: DAT—Deutsche Automobil Treuhand, 2015–2001. Available online: https://www.dat.de/presse/dat-report/ (accessed on 28 February 2019).
- Paromtchik, I.E.; Laugier, C. Motion Generation and Control for Parking an Autonomous Vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 24–27 April 1996. [Google Scholar]
- Kucharavy, D.; de Guio, R. Application of S-shaped curves. Procedia Eng. 2011, 9, 559–572. [Google Scholar] [CrossRef]
- European Commission. Autonomous Cars: A Big Opportunity for European Industry; European Commission: Brussels, Belgium, 2017. [Google Scholar]
- International Transport Forum. Automated and Autonomous Driving: Regulation under uncertainty. In Proceedings of the 2015 International Transport Forum (ITF), Leipzig, Germany, 27–29 May 2015. [Google Scholar]
- Secretary-General of the European Commission. Commission Staff Working Document—Impact Assessment. Accompanying the document Proposal for a Regulation of the European Parliament and the Council on Type-Approval Requirements for Motor Vehicles and Their Trailers, and Systems, Components and Separate Technical Units Intended for Such Vehicles, as Regards Their General Safety and the Protection of Vehicle Occupants and Vulnerable Road Users, Amending Regulation (EU) 2018... and Repealing Regulations (EC) No 78/2009, (EC) No 79/2009 and (EC) No 661/2009; Council of the European Union: Brussels, Belgium, 2018. [Google Scholar]
- BOSCH. From Innovation to Standard Equipment 30 Years of Safe Braking with Bosch ABS, BOSCH. 2019. Available online: https://www.bosch.co.jp/en/press/group-0807-05.asp (accessed on 22 January 2019).
- Chan, C.C. The State of the Art of Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Intergovernmental Panel on Climate Change and Working Group III. Emissions Scenarios. A Special Report of IPCC Working Group III; Intergovernmental Panel on Climate Change: Geneva, Switzerland, 2000. [Google Scholar]
- Litman, T. Autonomous Vehicles Implementation Predictions—Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, November 2018. [Google Scholar]
- Scobie, J.; Stachew, M. Electronic Control System Partitioning in Autonomous Cars. Automotive-EDN Asia. 11 September 2015. Available online: https://archive.ednasia.com/www.ednasia.com/ART_8800525576_1000000_TA_388bcfae.HTM (accessed on 4 February 2019).
- Torque. Bosch ESP Development. News Powered by Cision. 29 October 2014. Available online: http://news.cision.com/torque/i/bosch-esp-development,c1573803 (accessed on 4 February 2019).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Selected ECS | Description/Function |
|---|---|
| Group A | Established ECS frequently embedded in cars |
| CC | Comfort |
| ESP | Safety |
| ABS | Safety |
| Navi | Information/Communication |
| Stop-start | Fuel efficiency/Environmental emission control |
| Group B | Emerging ECS building upon ECS in group A |
| Traffic jam assist | Cross-functional |
| Parking pilot | Cross-functional |
| Highway autopilot | Cross-functional |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Restrepo, E.; Løvik, A.N.; Widmer, R.; Wäger, P.; Müller, D.B. Historical Penetration Patterns of Automobile Electronic Control Systems and Implications for Critical Raw Materials Recycling. Resources 2019, 8, 58. https://doi.org/10.3390/resources8020058
Restrepo E, Løvik AN, Widmer R, Wäger P, Müller DB. Historical Penetration Patterns of Automobile Electronic Control Systems and Implications for Critical Raw Materials Recycling. Resources. 2019; 8(2):58. https://doi.org/10.3390/resources8020058
Chicago/Turabian StyleRestrepo, Eliette, Amund N. Løvik, Rolf Widmer, Patrick Wäger, and Daniel B. Müller. 2019. "Historical Penetration Patterns of Automobile Electronic Control Systems and Implications for Critical Raw Materials Recycling" Resources 8, no. 2: 58. https://doi.org/10.3390/resources8020058
APA StyleRestrepo, E., Løvik, A. N., Widmer, R., Wäger, P., & Müller, D. B. (2019). Historical Penetration Patterns of Automobile Electronic Control Systems and Implications for Critical Raw Materials Recycling. Resources, 8(2), 58. https://doi.org/10.3390/resources8020058