
Modeling Dynamic Decision-Making of Virtual Humans


Abstract
:1. Introduction
1.1. Agent-Based-Modeling and Dynamic Decision-Making
1.2. Motivation for the Event Management Case Study
- Which corridors at the event have high potential for jams and congestions?
- Which measures can be taken to distribute the people at the event more uniformly to avoid high density conditions?
- How many toilets are needed?
- How much service staff is needed at the northern bar to avoid exceeding an average waiting time of five minutes?
- How to design the time table at the end of the event to avoid batch departures?
2. Dynamic Decision-Making as the Action Selection Problem of Artificial Intelligence Research
2.1. Three Layer Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Layer | Meaning | |
|---|---|---|---|
| Hoogendorn and Bovy [35] | Blumberg [36] | Reynolds [37] | |
| Strategic Level | Motivation Layer | Action Selection Layer | Implements basic strategies, goals and objectives, thus the action selection of the virtual humans. |
| Tactical Level | Task Layer | Navigation Layer | Implements the wayfinding behavior of the agents. Further distinction by Kapadia [38]. Navigation: Detection of global collision-free path. Steering: Movement of the agent along the path by avoiding static and dynamic obstacles. |
| Operational Level | Motor Layer | Locomotion Layer | Constrains the body movements of the agents in consideration of the performed action (e.g., walking, running, talking, etc.). |
2.2. Modeling People
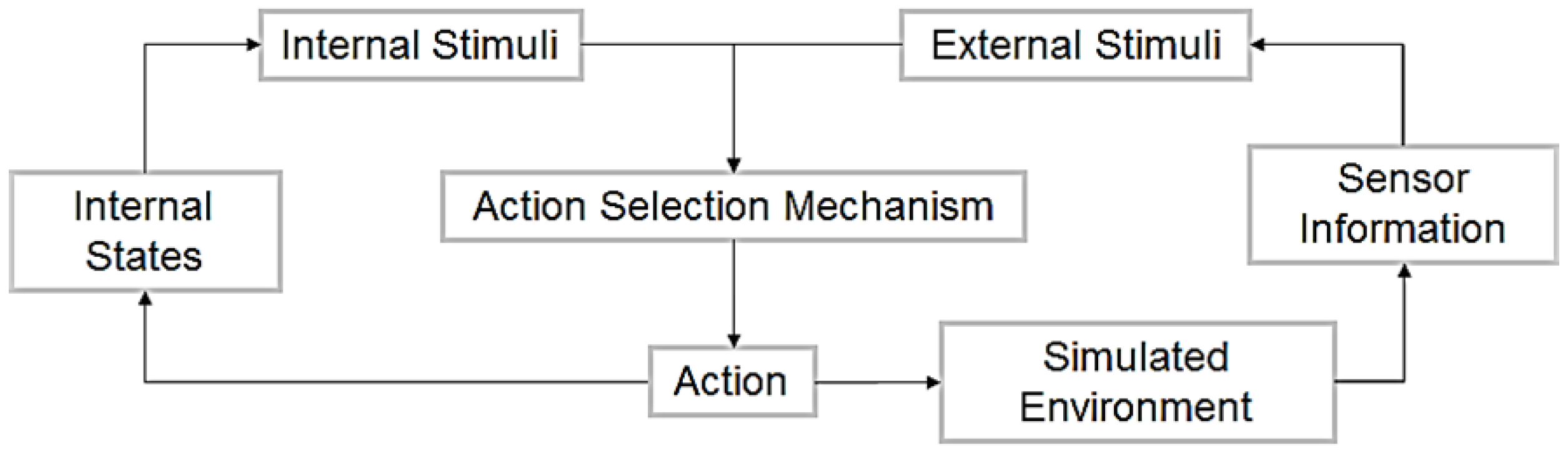
2.3. Virtual Humans as Intelligent Agents
3. Modeling Dynamic Decision-Making for Virtual Humans
3.1. Related Research
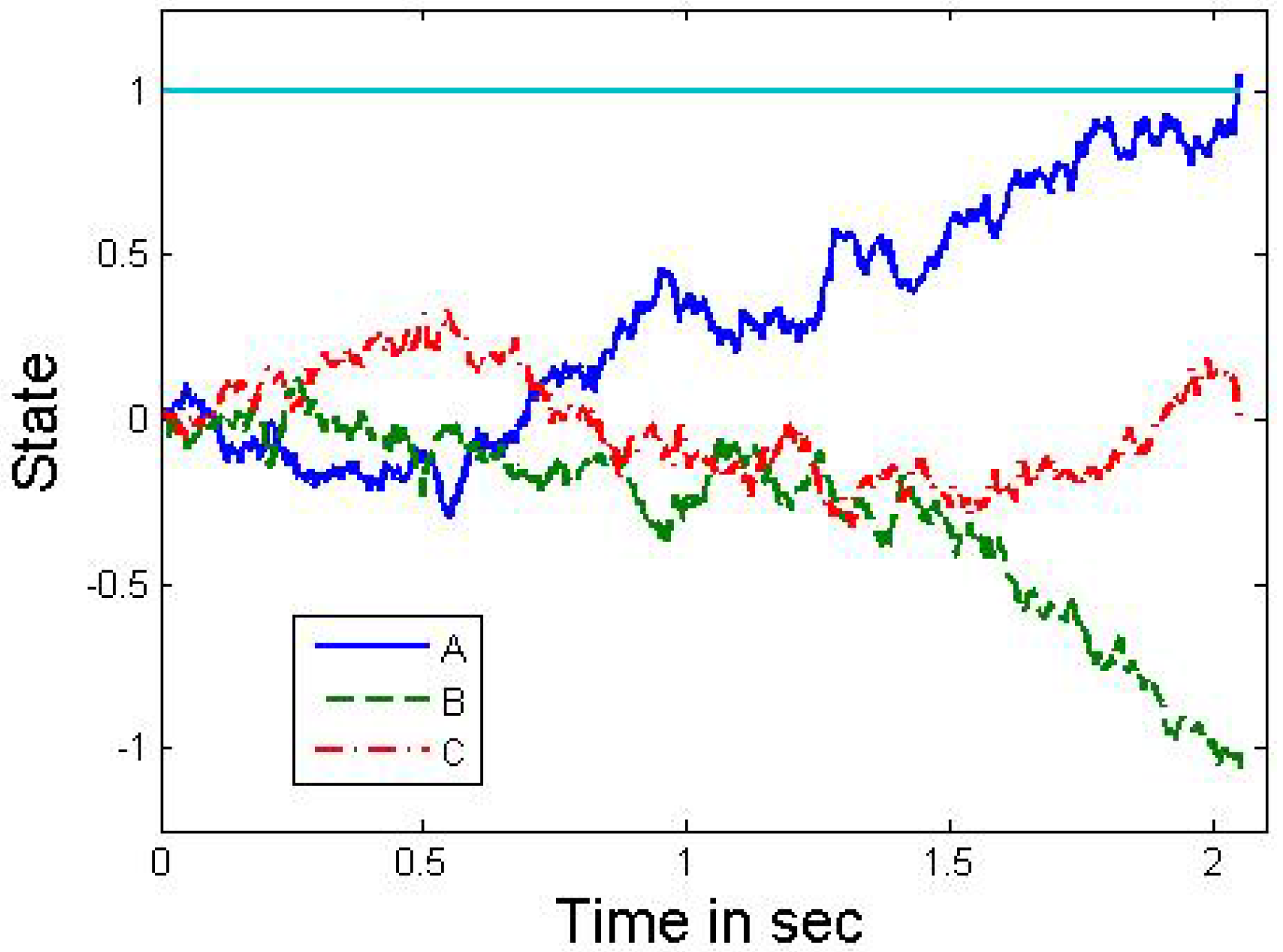
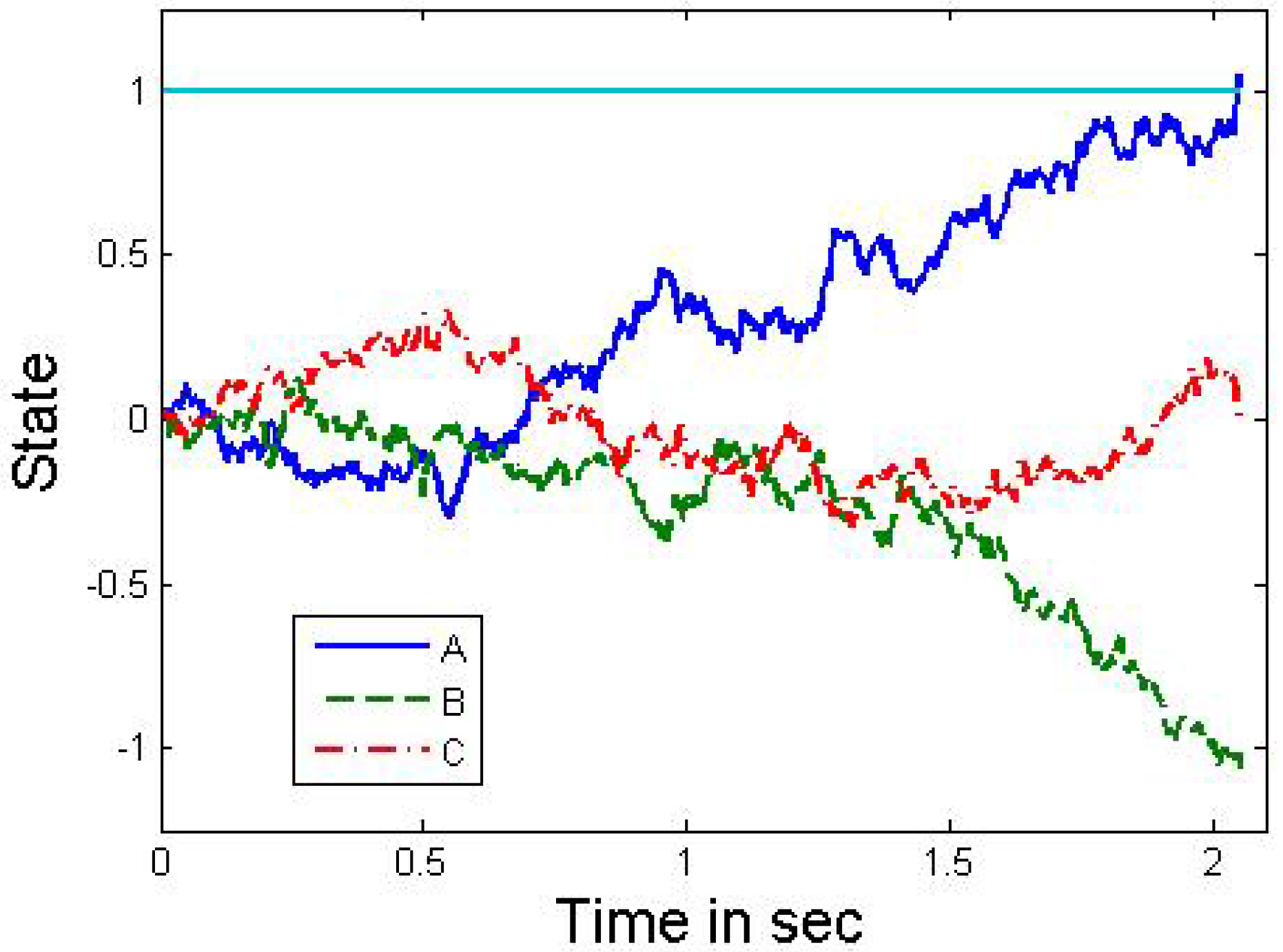
3.1.1. Busemeyer: Decision Field Theory
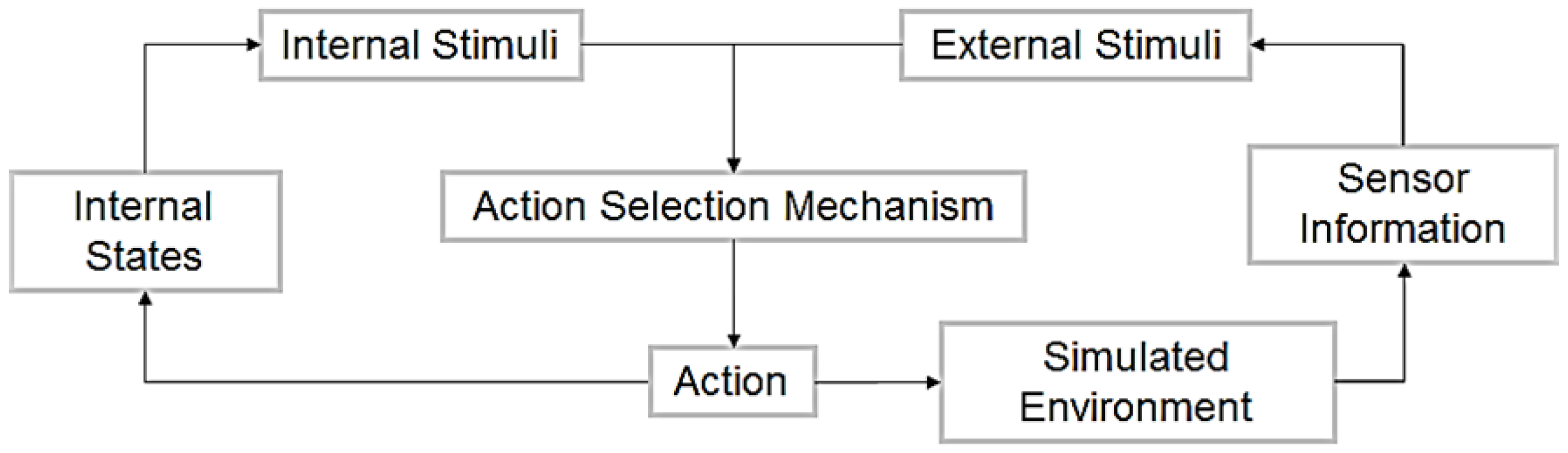
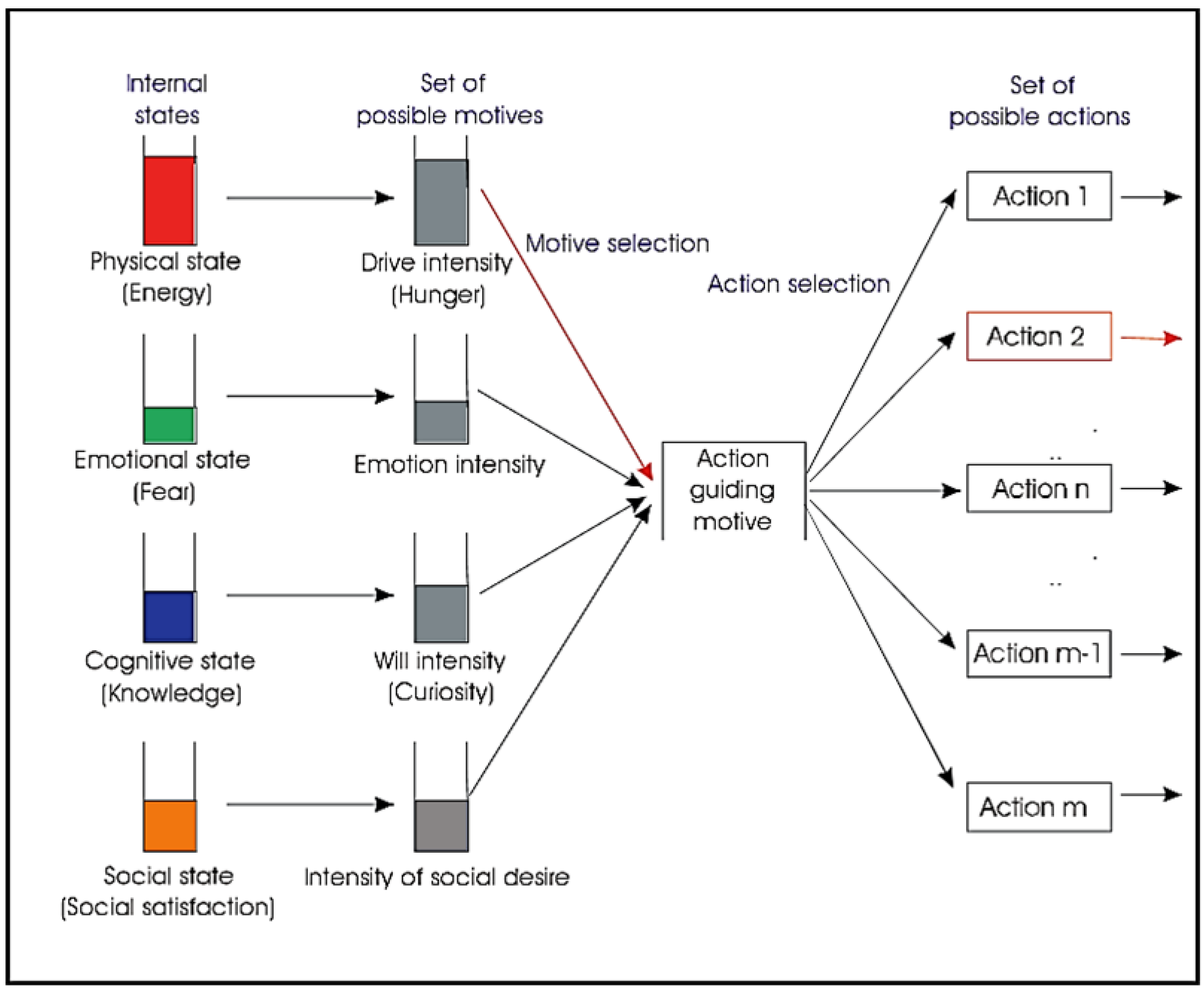
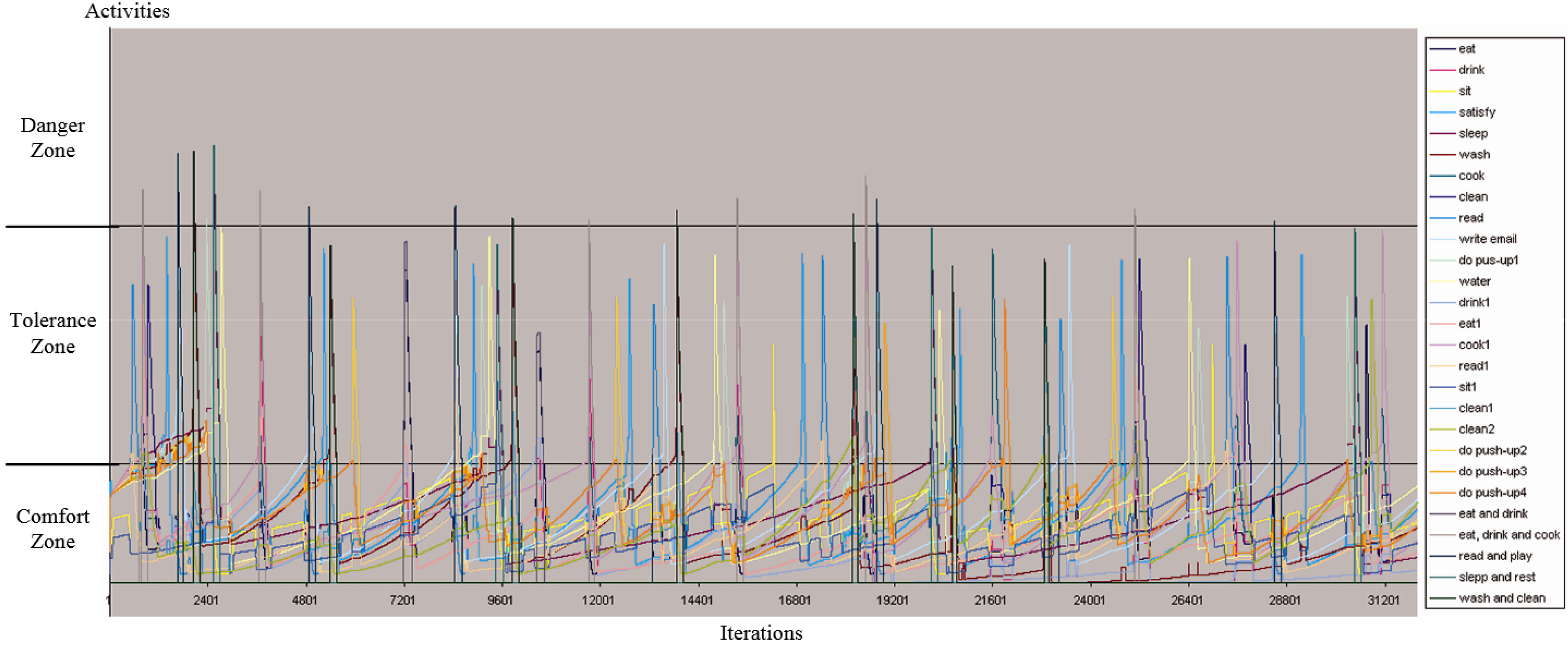
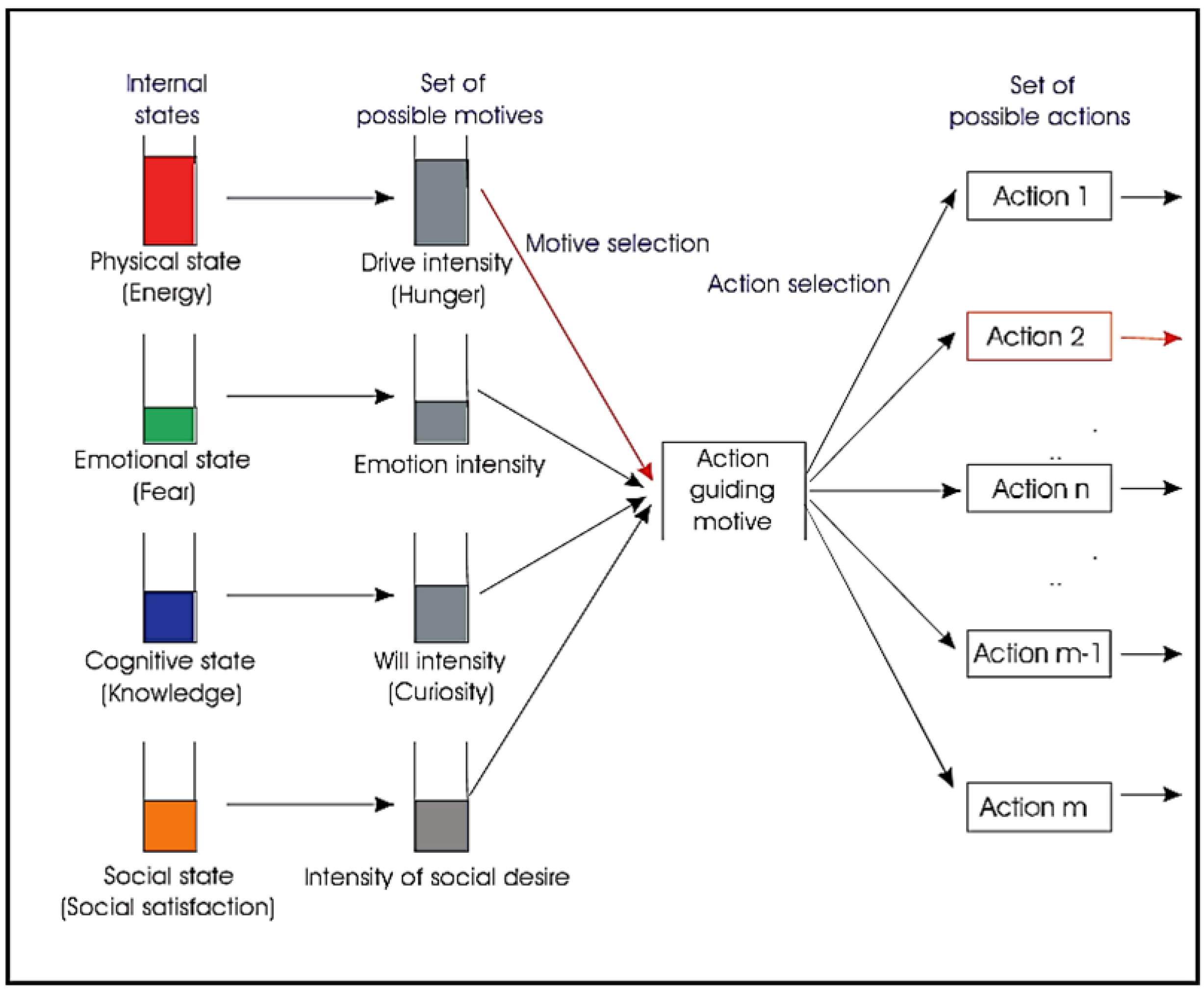
3.1.2. De Sevin: Activation of Motivations
3.1.3. Schmidt: The PECS Model
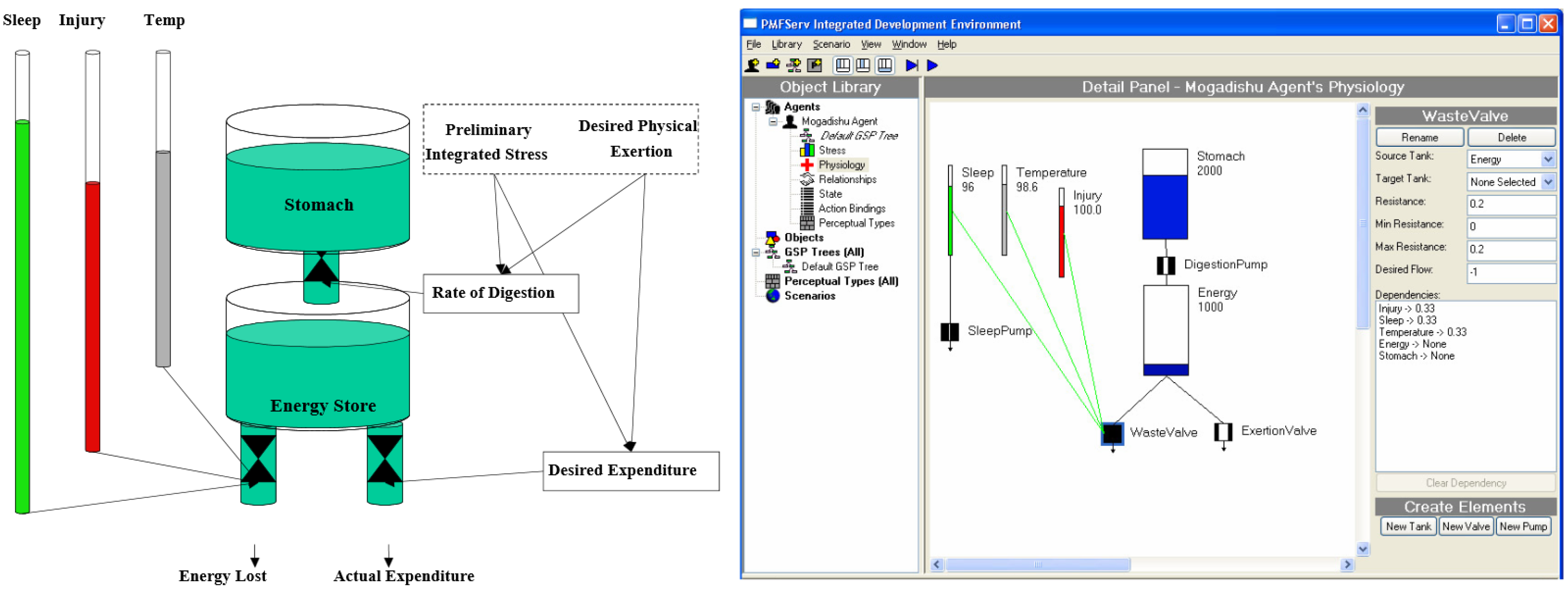
3.1.4. Silverman: PMF Reservoirs
3.2. The Concept
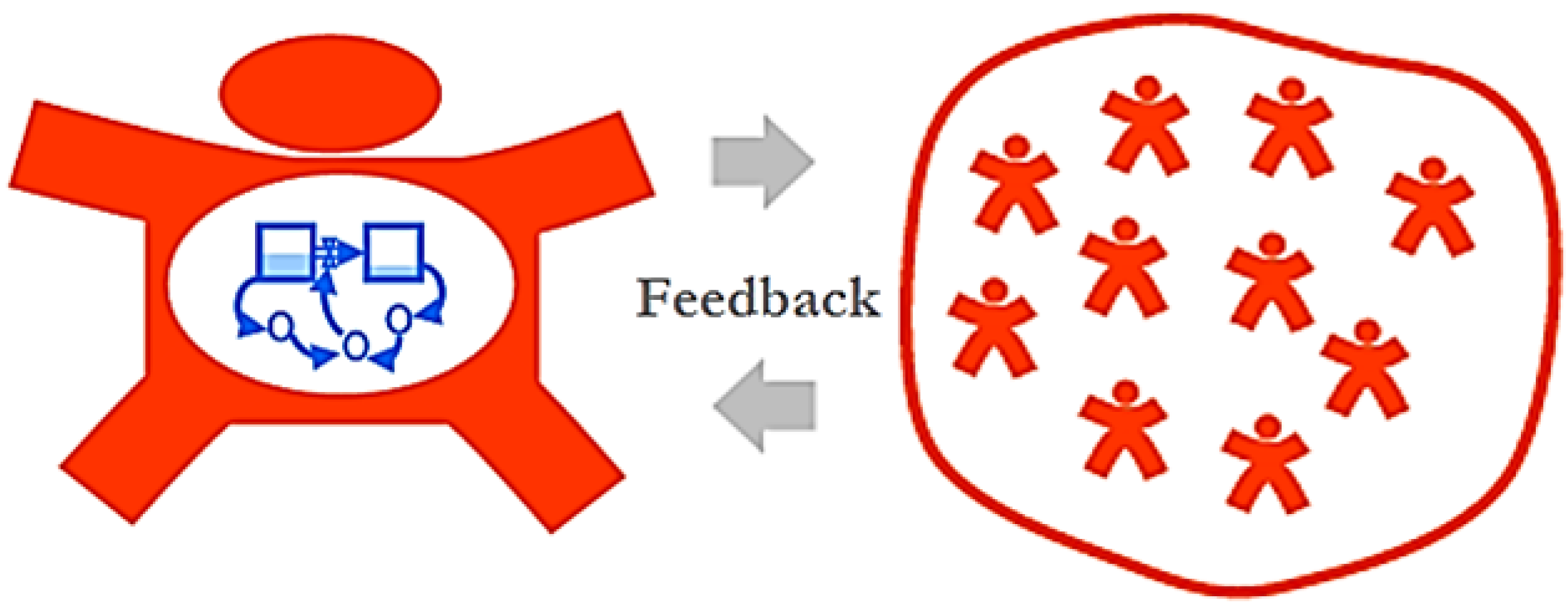
3.2.1. Behaviorist Analogy to the Human Physiological Homeostasis
3.2.2. Activation of Motivations as an Abstraction of the Physiological Homeostasis

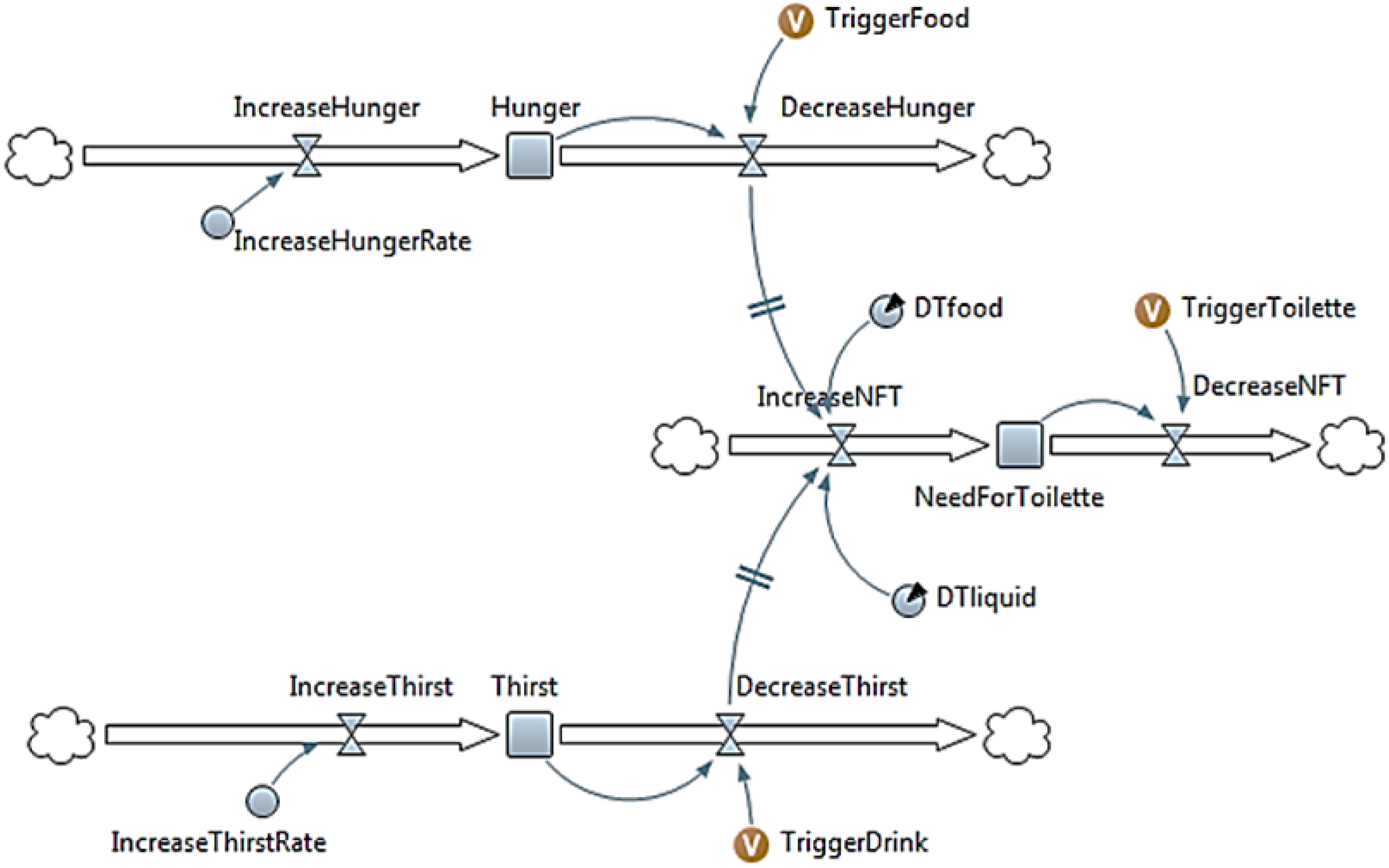
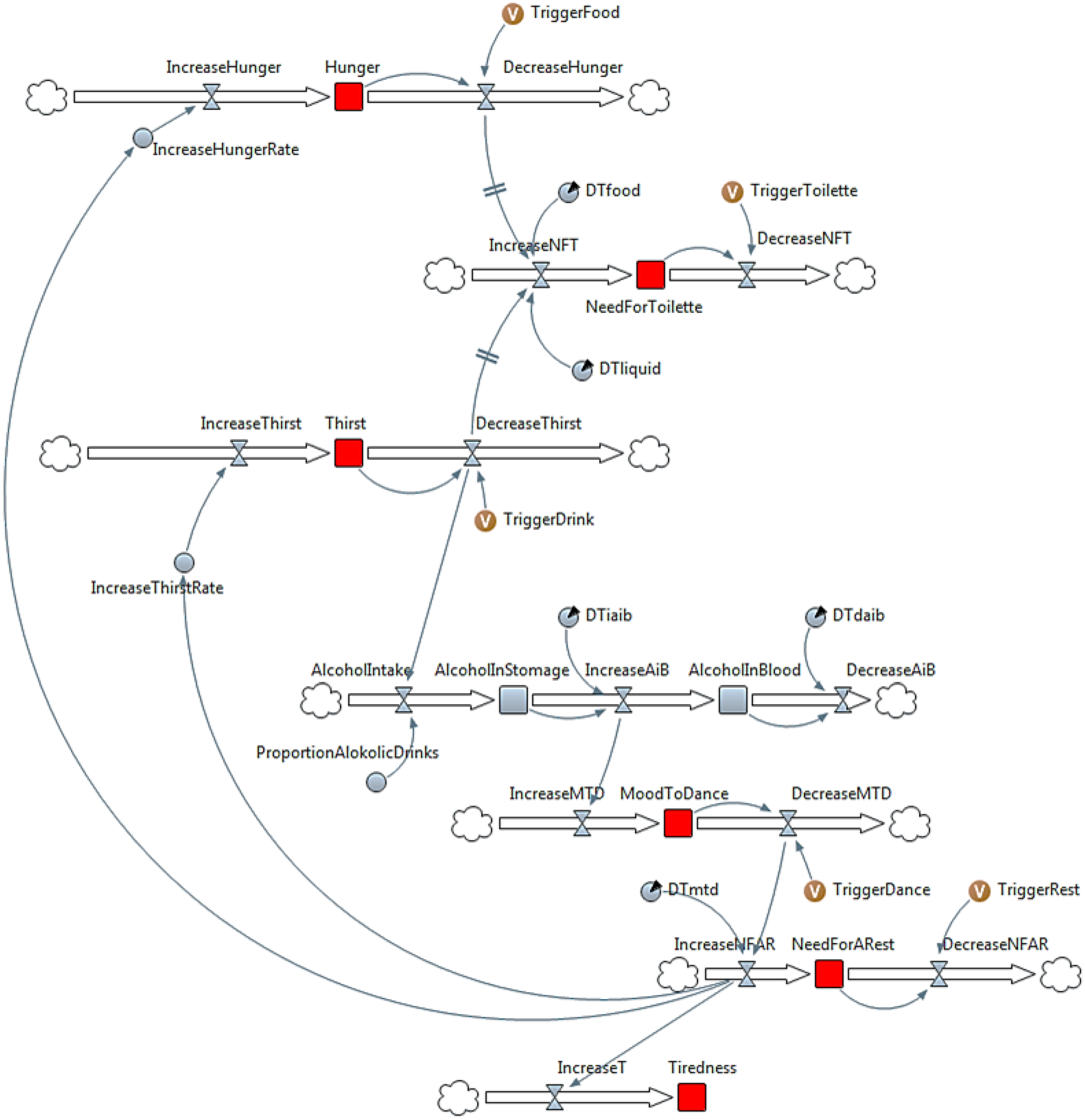
3.2.3. Modeling Internal Motivations of Event Visitors
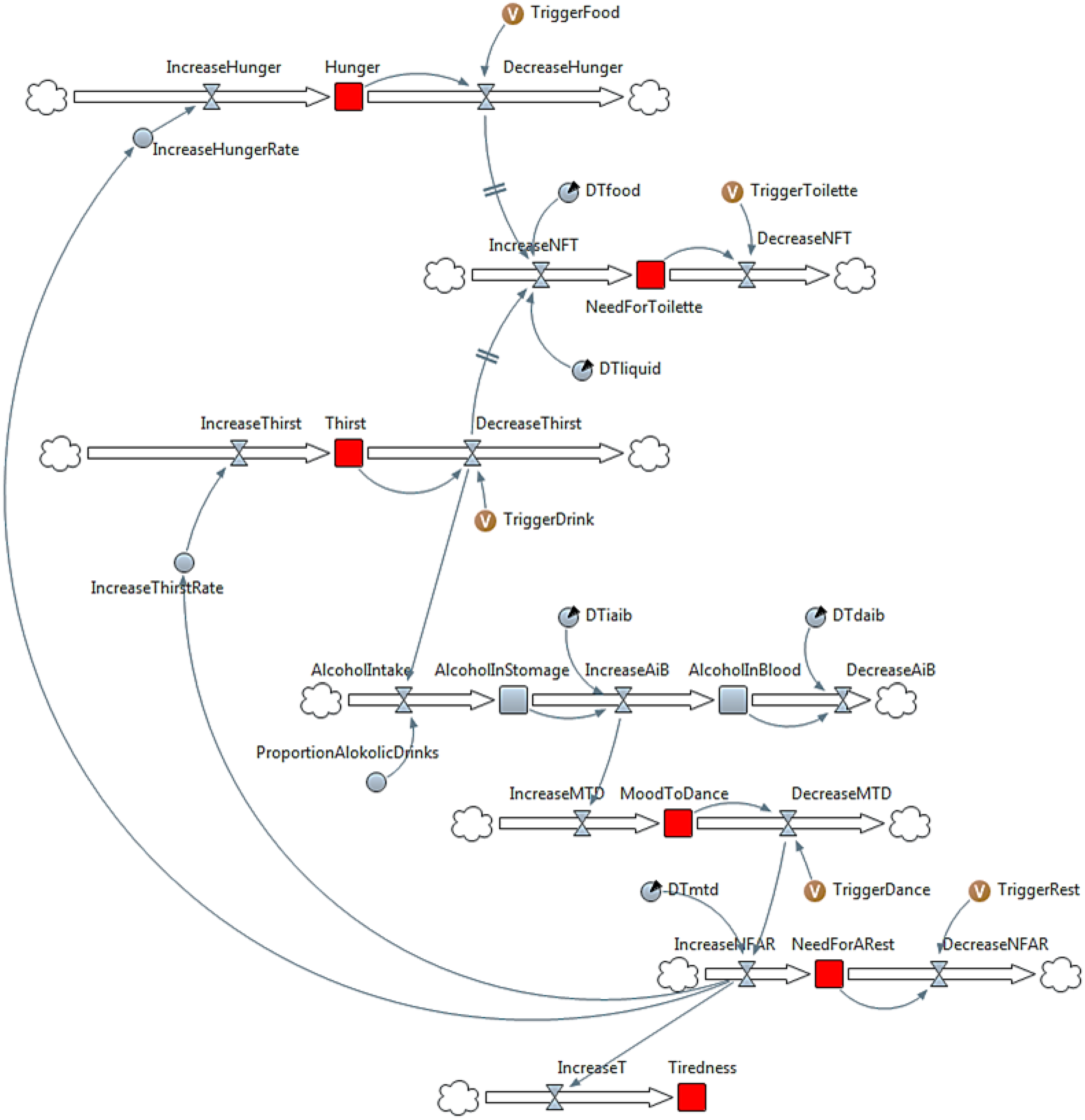
- getDistance(): Returns the shortest air distance to the closest place where the activity can be executed.
- getQueueLength(): Returns the number of waiting people in the service line(s). This takes into account how long the agent will have to wait before the activity can be executed.
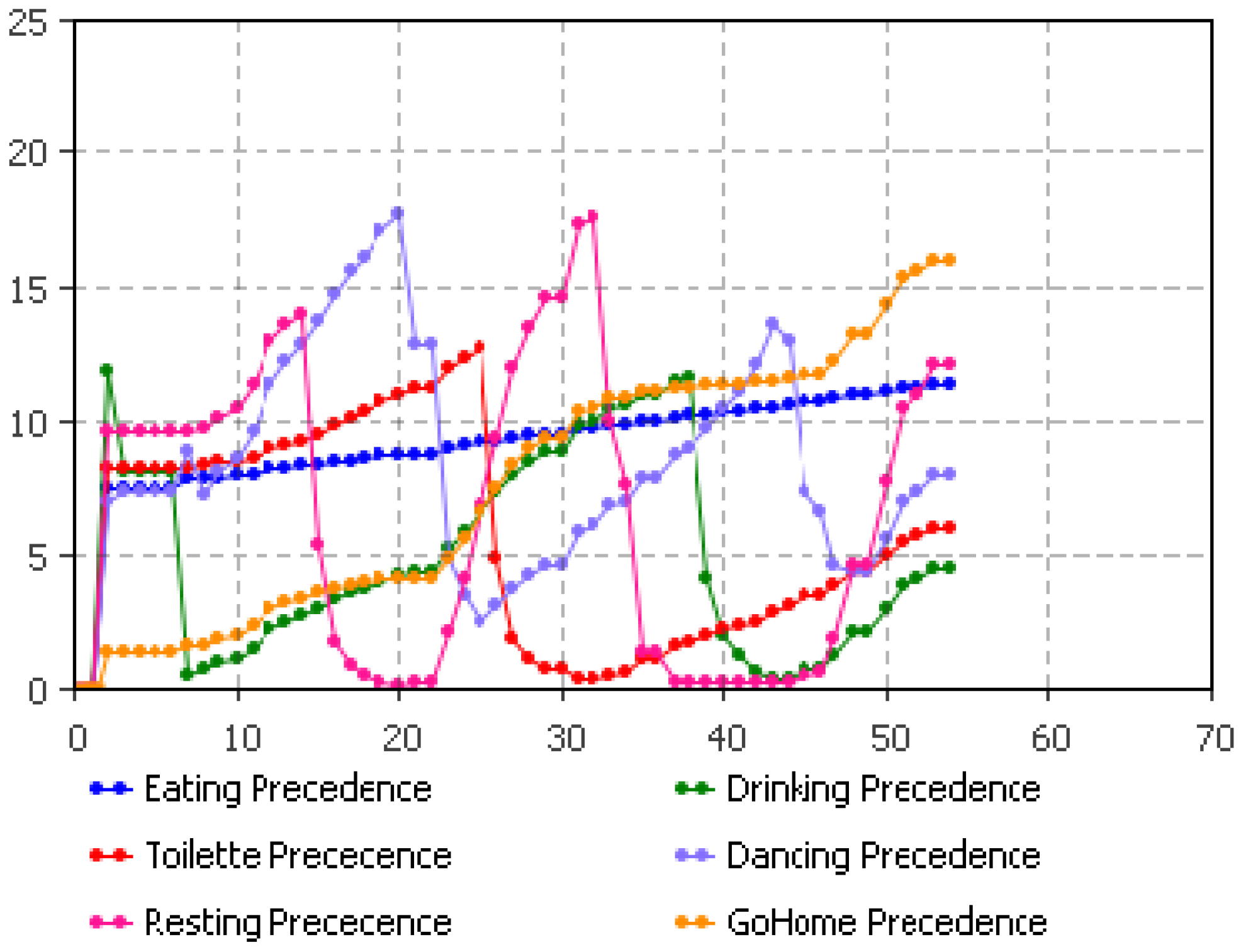
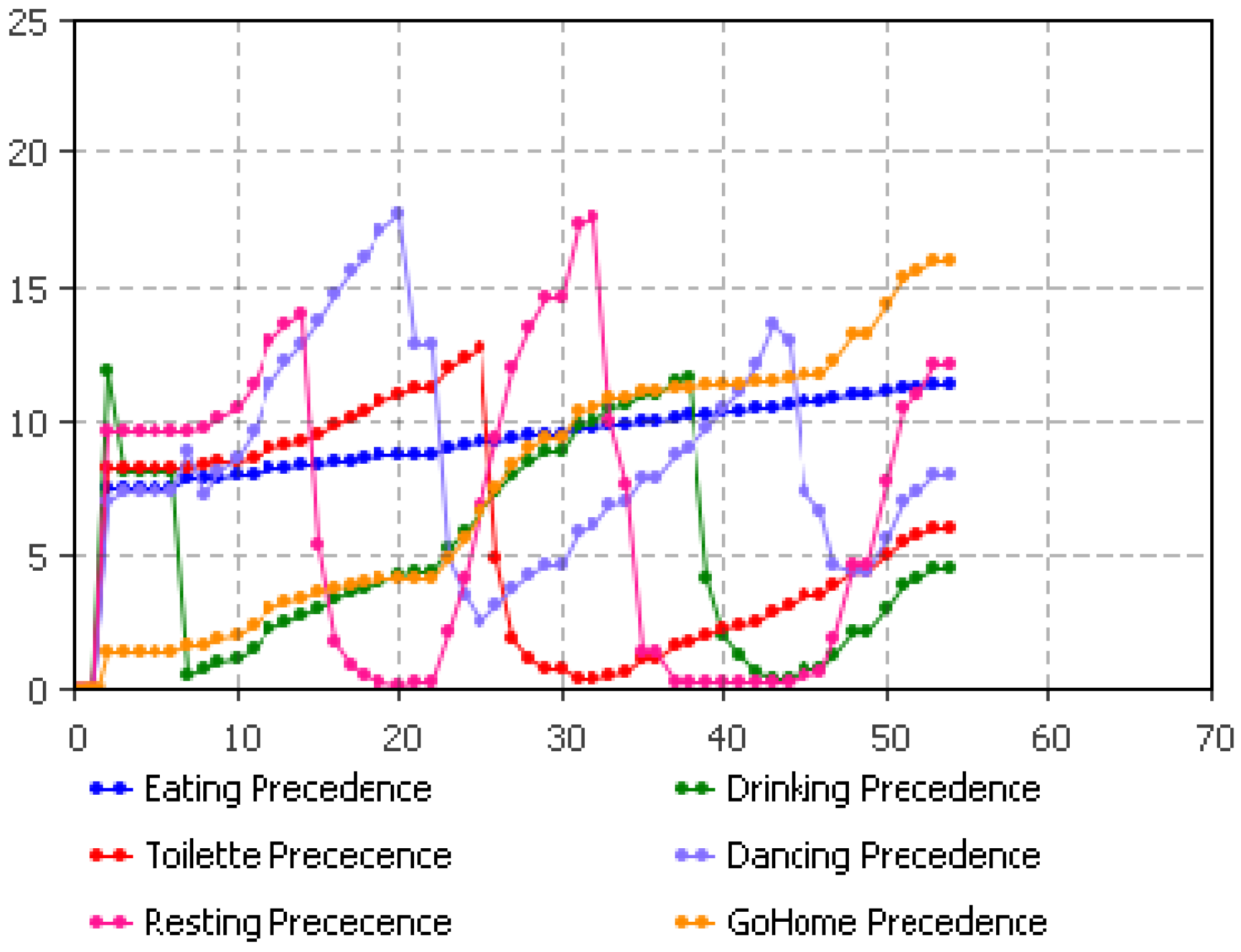
3.2.4. Resulting Nonlinear Motivation Evolution
4. Implementation of the Case Study

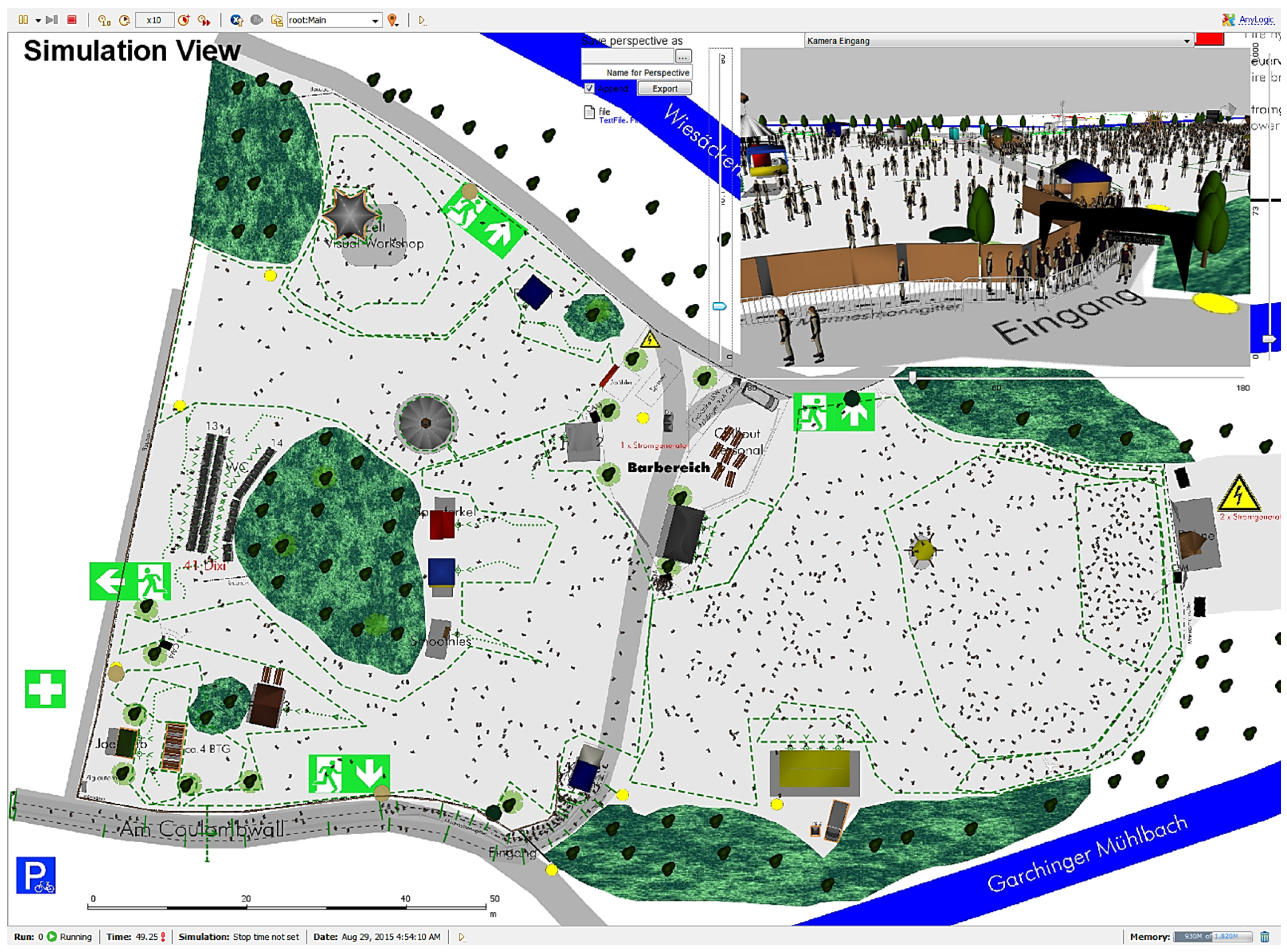
4.1. The Architecture of the Simulation
4.2. Collection of Key Parameters for Calibration and Validation Purposes
- Average duration time for a person to get served (service time) and average duration time for a person to visit the toilet.
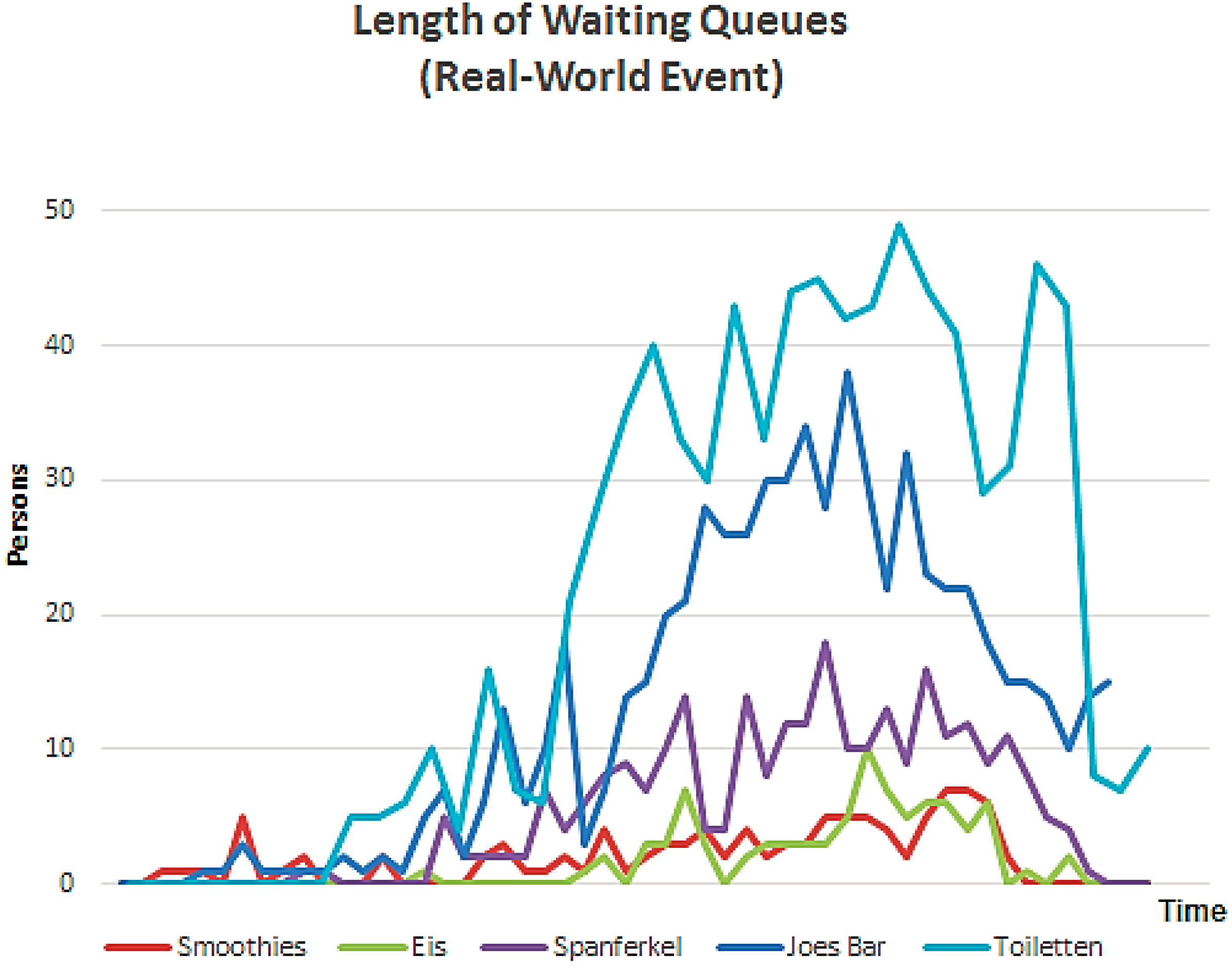
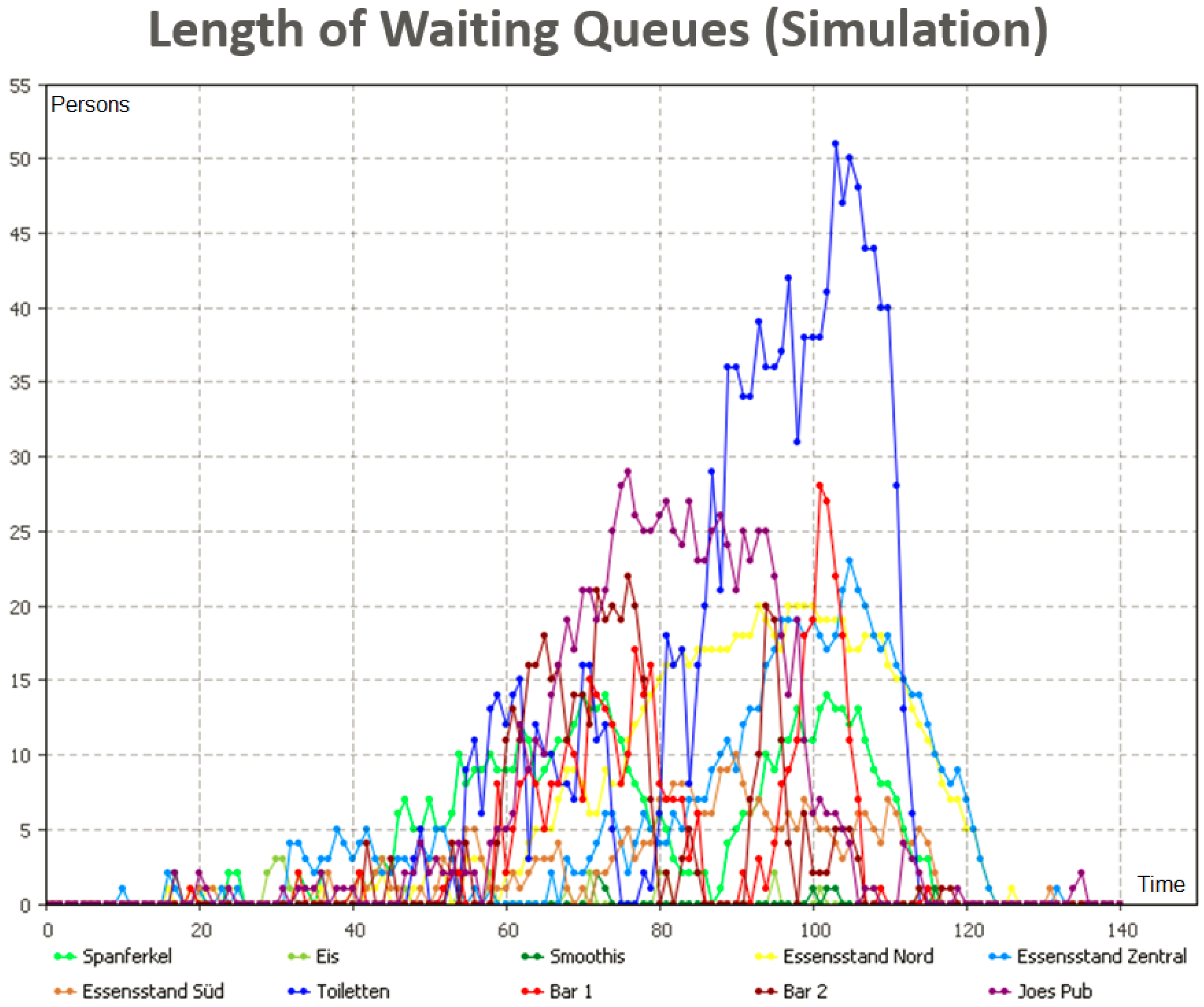
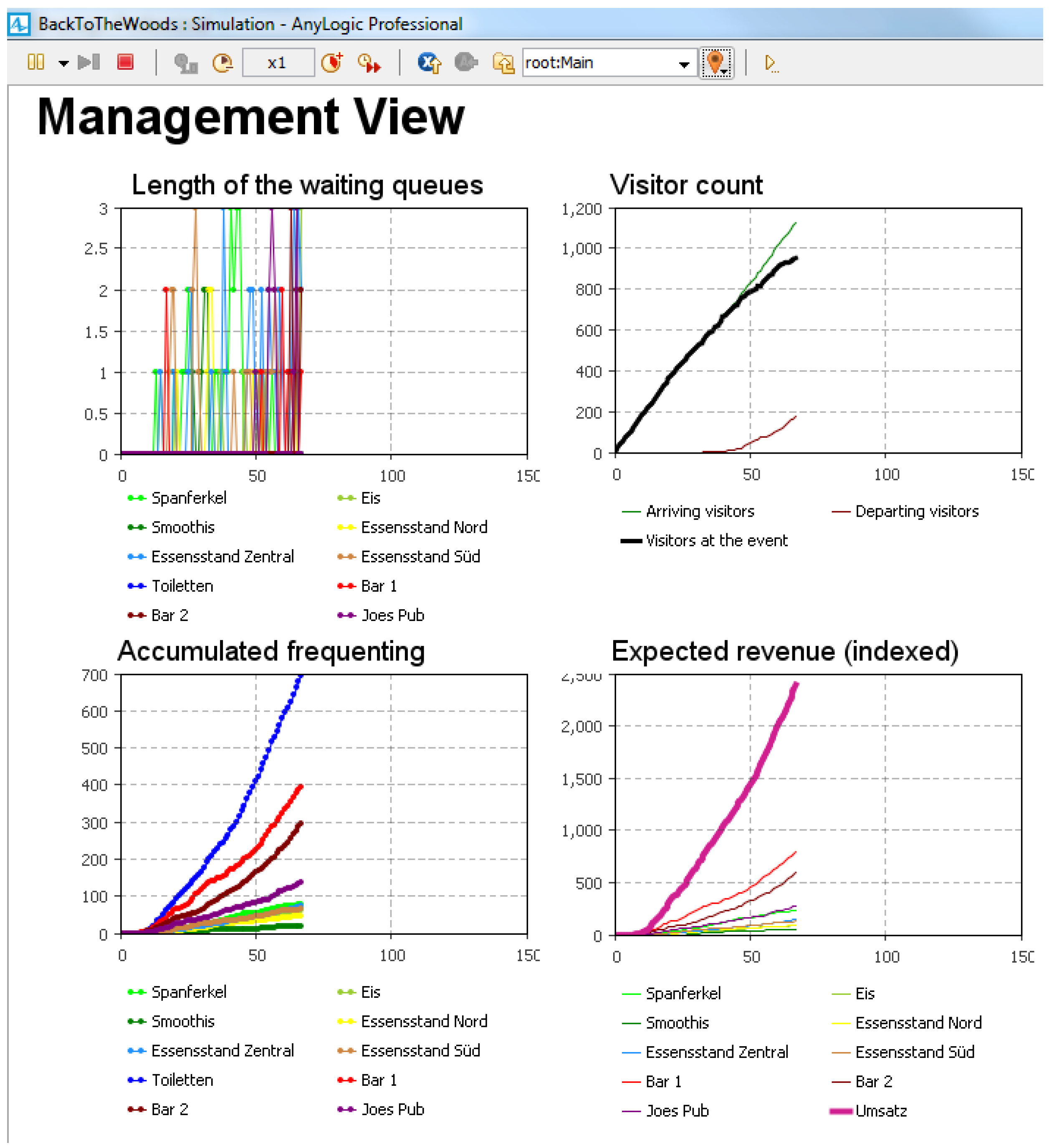
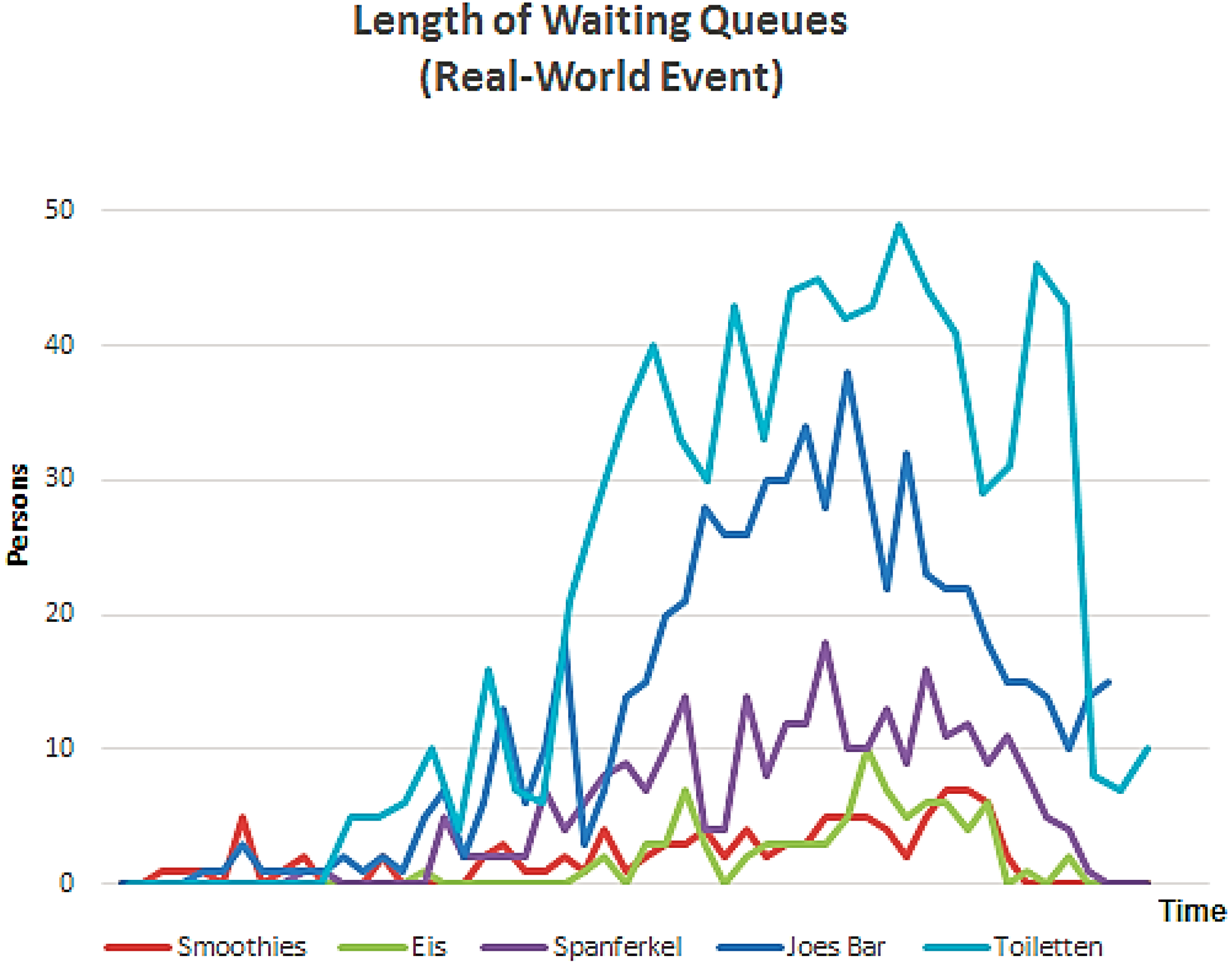
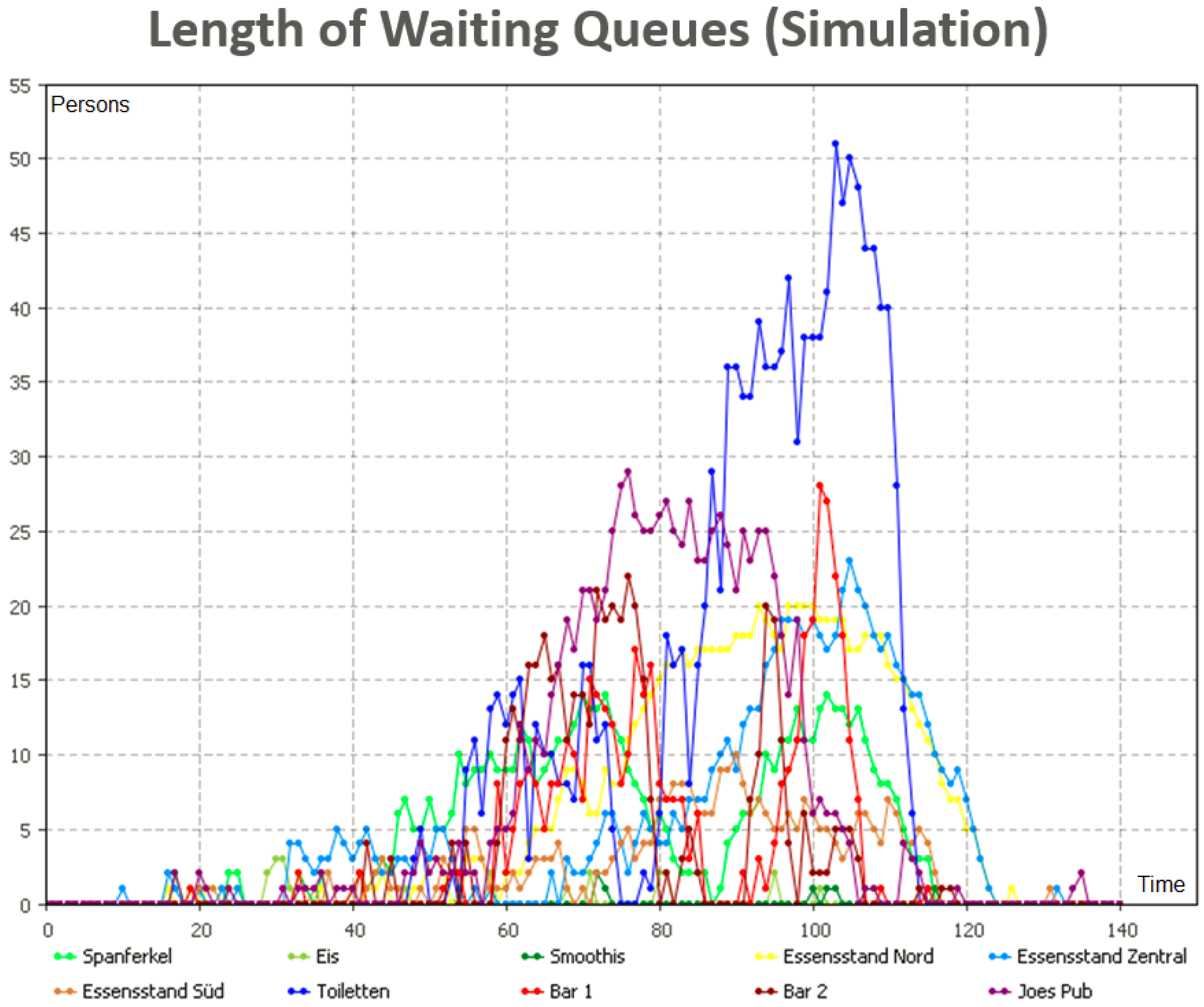
- Length of waiting queues over time.
- People entering and leaving.
- Density assessment for different areas.

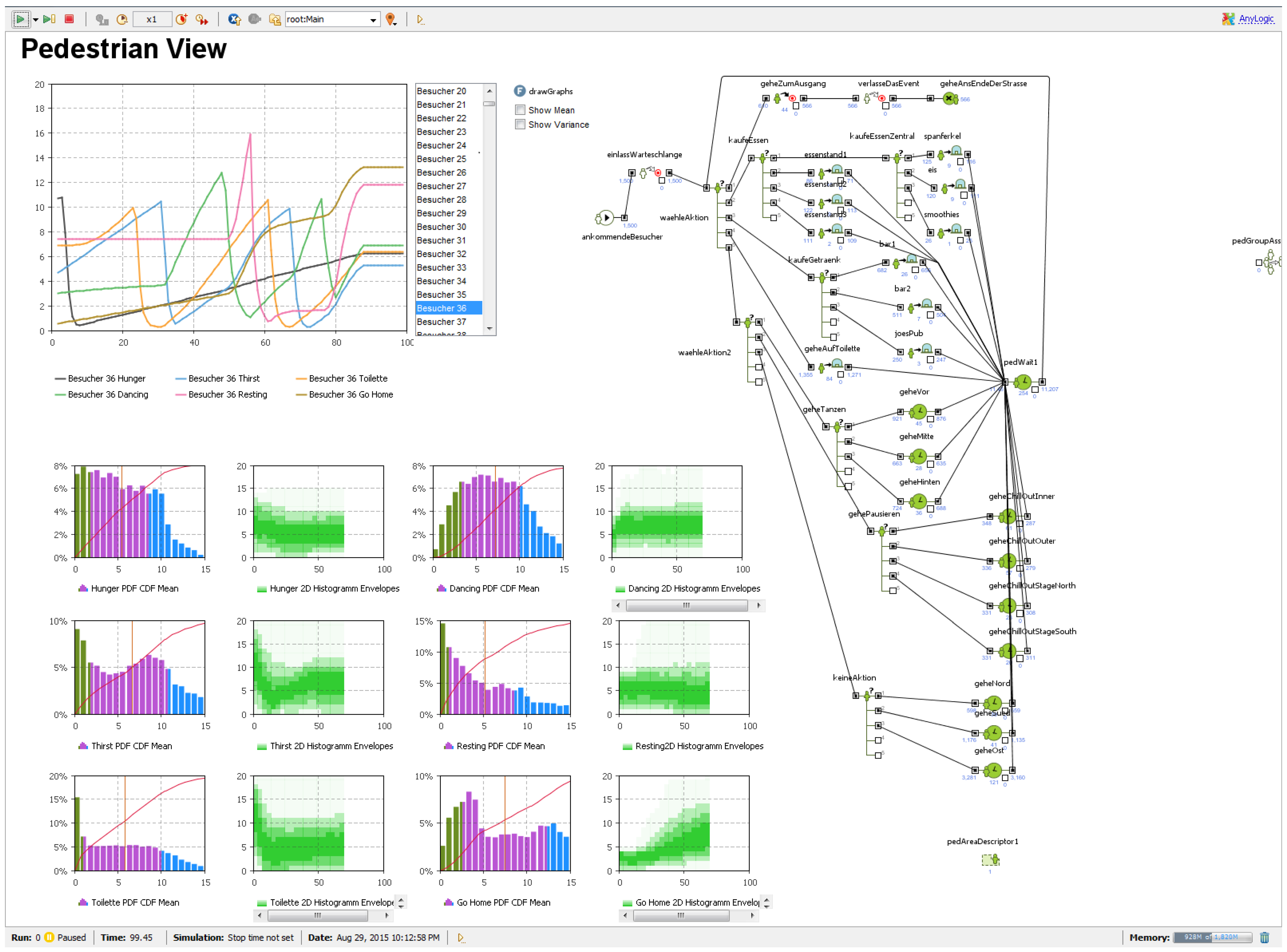
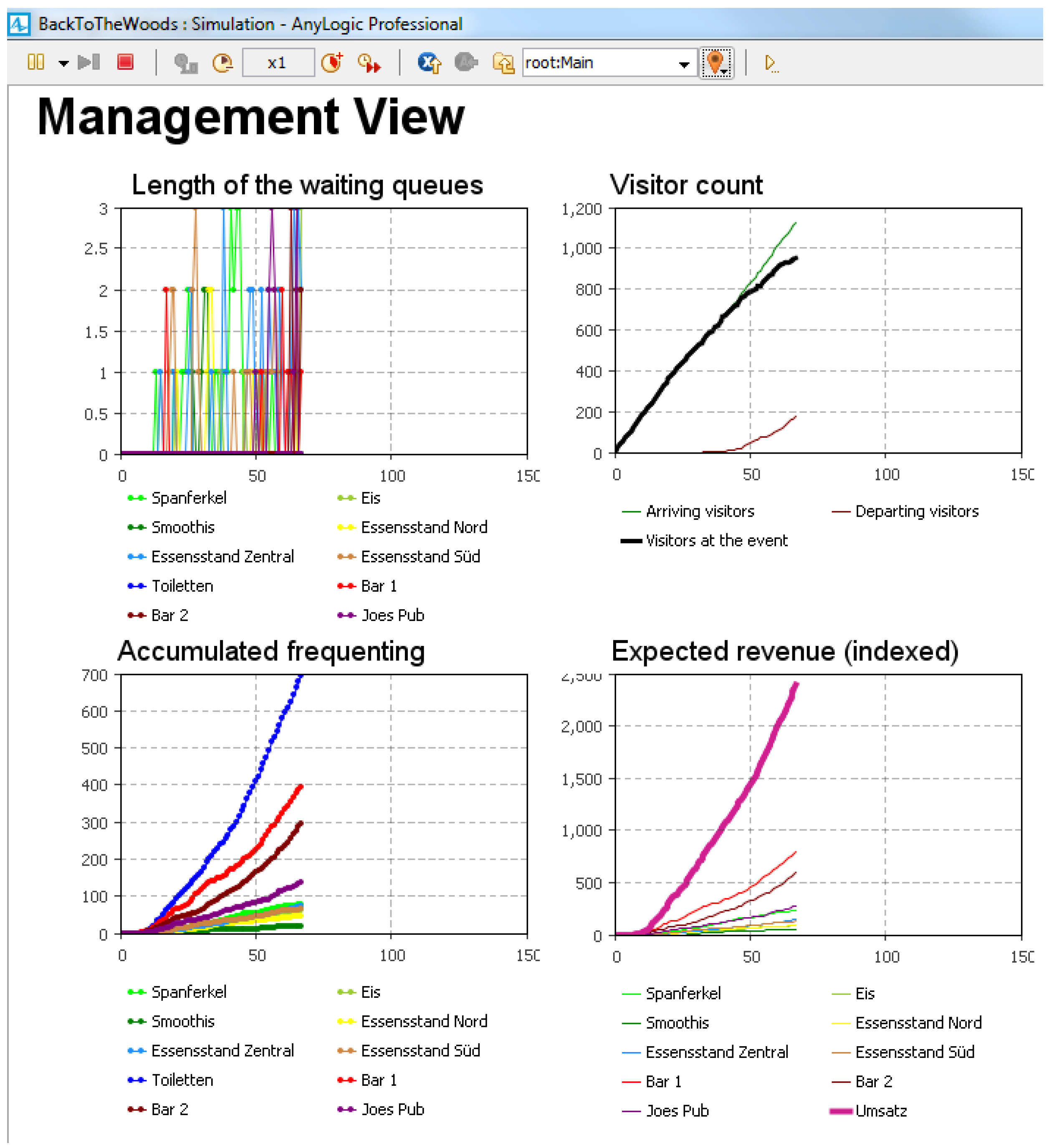
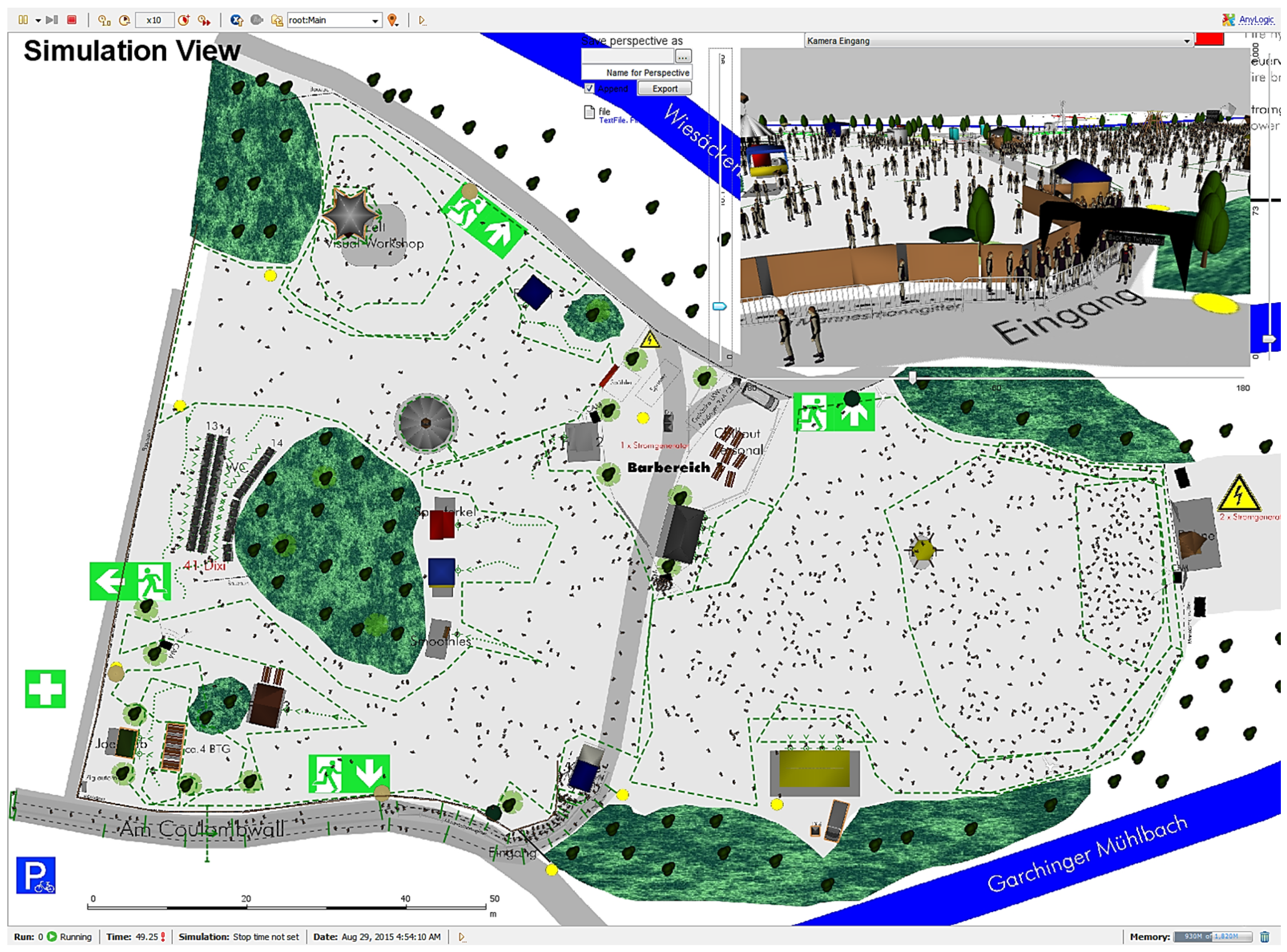
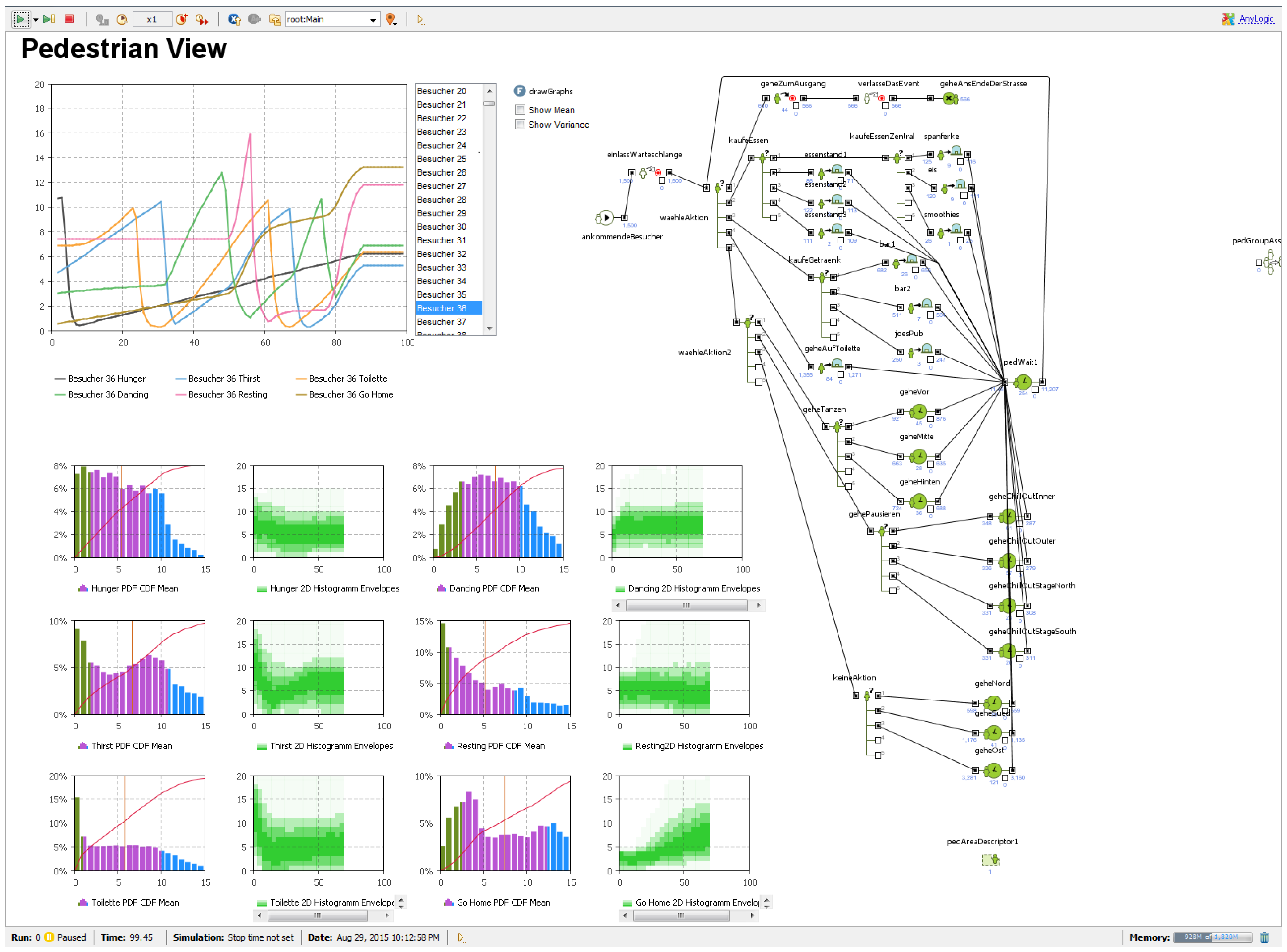
4.3. Visualization of Simulation Results

4.4. Analysis of Simulation Results
4.4.1. The Pedestrian Perspective
4.4.2. The Management Perspective
4.5. Empirical Data Comparison
5. Summary and Conclusion
Acknowledgments
Conflicts of Interest
References
- Busemeyer, J.R. Dynamic Decision Making. In International Encyclopedia of the Social and Behavioral Sciences: Methodology, Mathematics and Computer Science; Elsevier: Oxford, UK, 1999; pp. 3903–3908. [Google Scholar]
- Brehmer, B. Dynamic decision making: Human control of complex systems. Acta Psychol. 1992, 81, 211–241. [Google Scholar] [CrossRef]
- Größler, A.; Stouten, H. Introduction to the Special Issue Dynamic Decision-Making in Controlled Experiments. Systems 2015, 3, 60–61. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez, C. Instance-based learning in dynamic decision making. Cogn. Sci. 2003, 27, 591–635. [Google Scholar] [CrossRef]
- Borshchev, A. The Big Book of Simulation Modeling: Multimethod Modeling with AnyLogic 6; AnyLogic North American: New York, NY, USA, 2013. [Google Scholar]
- Rouse, W. Human-computer interaction in the control of dynamic systems. ACM Comput. Surv. (CSUR) 1981, 13, 71–99. [Google Scholar] [CrossRef]
- Sterman, J. Business Dynamics. Systems Thinking and Modeling for a Complex World; Irwin/McGraw-Hill: Boston, MA, USA, 2000; pp. 982–986. [Google Scholar]
- Ulrich, H.; Probst, G. Anleitung zum Ganzheitlichen Denken und Handeln: Ein Brevier für Führungskräfte; Pail Haupt: Bern, Switzerland, 1995. [Google Scholar]
- Sterman, J. System dynamics modeling. Calif. Manag. Rev. 2001, 43, 8–25. [Google Scholar] [CrossRef]
- Letcher, R.; Jakeman, A. Model developement for integrated assessment. Water Resour. 2004, 40, 5520–5531. [Google Scholar]
- Janssen, M.A. Agent-Based Modelling. In Internet Encyclopaedia of Ecological Econom ics; Arizona State University: Lake Havasu, AL, USA, 2005; pp. 1–9. [Google Scholar]
- Funke, J. Experimental research on complex problem solving. In Complex Problem Solving: The European Perspective; Psychology Press: New York, NY, USA, 1995; pp. 243–268. [Google Scholar]
- Gonzalez, C.; Vanyukov, P.; Martin, M. The use of microworlds to study dynamic decision making. Comput. Hum. Behav. 2005, 21, 273–286. [Google Scholar] [CrossRef]
- Lipshitz, R.; Klein, G. Taking stock of naturalistic decision making. J. Behav. Decis. Mak. 2001, 14, 331–352. [Google Scholar] [CrossRef]
- Schelling, T. Micromotives and Macrobehavior; WW Norton & Company: New York, NY, USA, 2006; pp. 10–43. [Google Scholar]
- Aw, A.; Rascle, M. Resurrection of “second order” models of traffic flow. SIAM J. Appl. Math. 2000, 60, 916–938. [Google Scholar] [CrossRef]
- Goodman, M.; Kreutzer, W.B.; Sterman, J.; Kreutzer, D.P. “Electrifying” Learning: Computerizing the Beer Game; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Sterman, J.D. Misperceptions of feedback in dynamic decision making. Organ. Behav. Hum. Decis. Process. 1989, 43, 301–335. [Google Scholar] [CrossRef]
- Toda, M. The design of a fungus—Eater: A model of human behavior in an unsophisticated environment. Behav. Sci. 1962, 7, 164–183. [Google Scholar] [CrossRef]
- Happe, K.; Kellermann, K.; Balmann, A. Agent-based analysis of agricultural policies: An illustration of the agricultural policy simulator AgriPoliS, its adaptation and behavior. Ecol. Soc. 2006, 11, 49–57. [Google Scholar]
- Eubank, S.; Guclu, H.; Kumar, V. Modelling disease outbreaks in realistic urban social networks. Nature 2004, 429, 180–184. [Google Scholar] [CrossRef] [PubMed]
- Davidsson, P.; Henesey, L.; Ramstedt, L.; Törnquist, J.; Wernstedt, F. An analysis of agent-based approaches to transport logistics. Transp. Res. Part C: Emerg. Technol. 2005, 13, 255–271. [Google Scholar] [CrossRef]
- Chen, X.; Zhan, F.B. Agent-based modelling and simulation of urban evacuation: Relative effectiveness of simultaneous and staged evacuation strategies. J. Oper. Res. Soc. 2008, 59, 25–33. [Google Scholar] [CrossRef]
- Brehmer, B.; Naehlinder, S. Achieving what cannot be done: Coping with the time constants in a dynamic decision task by doing something else. Scand. J. Psychol. 2007, 48, 359–365. [Google Scholar] [CrossRef] [PubMed]
- Jensen, E.; Brehmer, B. Understanding and control of a simple dynamic system. Syst. Dyn. Rev. 2003, 19, 119–137. [Google Scholar] [CrossRef]
- Kerstholt, J. The effect of time pressure on decision-making behaviour in a dynamic task environment. Acta Psychol. 1994, 86, 89–104. [Google Scholar] [CrossRef]
- Gonzalez, C.; Dutt, V. A generic dynamic control task for behavioral research and education. Comput. Hum. Behav. 2011, 27, 1904–1914. [Google Scholar] [CrossRef]
- Kirlik, A.; Miller, R.; Jagacinski, R. Supervisory control in a dynamic and uncertain environment: A process model of skilled human-environment interaction. Syst. Man Cyber. 1993, 23, 929–952. [Google Scholar] [CrossRef]
- Pan, X.; Han, C.; Dauber, K.; Law, K. A multi-agent based framework for the simulation of human and social behaviors during emergency evacuations. Ai & Soc. 2007, 22, 113–132. [Google Scholar]
- Handel, O.; Biedermann, D.H.; Kielar, P.M.; Borrmann, A. A System Dynamics based Perspective to Help to Understand the Managerial Big Picture in Respect of Urban Event Dynamics. Transp. Res. Procedia 2014, 2, 669–674. [Google Scholar] [CrossRef]
- Helbing, D.; Mukerji, P. Crowd disasters as systemic failures: Analysis of the Love Parade disaster. EPJ Data Sci. 2012, 1, 7–14. [Google Scholar] [CrossRef]
- Sevin, E.; Thalmann, D.; De Sevin, E.; Thalmann, D. A motivational model of action selection for virtual humans. In Computer Graphics International 2005; number VRLAB-CONF-2005-014; IEEE: New York, NY, USA, 2005; pp. 213–220. [Google Scholar]
- Tyrell, T. Defining the Action Selection Problem; Centre for Cognitive Science: Sussex, UK, 1994. [Google Scholar]
- Tyrrell, T. Computational Mechanisms for Action Selection; University of Edinburgh: Edinburgh, UK, 1993. [Google Scholar]
- Hoogendoorn, S.P.; Bovy, P.H.L. Pedestrian route-choice and activity scheduling theory and models. Transp. Res. Part B Methodol. 2004, 38, 169–190. [Google Scholar] [CrossRef]
- Blumberg, B.; Galyean, T. Multi-level direction of autonomous creatures for real-time virtual environments. In Proceedings of the 22nd Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 27–29 May 1995; pp. 47–54.
- Reynolds, C.W. Steering behaviors for autonomous characters. In Proceedings of the Game Developers Conference; CMP Game Media Group: San Francisco, CA, USA, 1999; pp. 763–782. [Google Scholar]
- Kapadia, M.; Badler, N.I. Navigation and steering for autonomous virtual humans. Wiley Interdiscip. Rev. Cogn. Sci. 2013, 4, 263–272. [Google Scholar] [CrossRef] [PubMed]
- Nagel, K.; Schreckenberg, M. A cellular automaton model for freeway traffic. J. Phys. 1992, 2, 2221–2229. [Google Scholar] [CrossRef]
- Blue, V.V.; Embrechts, M.; Adler, J.J. Cellular automata modeling of pedestrian movements. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Orlando, FL, USA, 12–5 October 1997; pp. 2320–2328.
- Helbing, D.; Molnar, P.; Molnár, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282–4286. [Google Scholar] [CrossRef]
- Kneidl, A.; Borrmann, A. Methoden zur Abbildung Menschlichen Navigationsverhaltens Bei der Modellierung von Fußgängerströmen. Ph.D. Thesis, Technische Universität München, München, Germany, 2013. [Google Scholar]
- Helbing, D. Quantitative Sociodynamics; Springer: Berlin, Germany, 1995. [Google Scholar]
- Freeman, W. Simulation of chaotic EEG patterns with a dynamic model of the olfactory system. Biol. Cybern. 1987, 56, 139–150. [Google Scholar] [CrossRef] [PubMed]
- Freeman, W. Tutorial on neurobiology: From single neurons to brain chaos. Int. J. Bifurc. Chaos 1992, 2, 451–462. [Google Scholar] [CrossRef]
- Thorngate, W. “In General” vs. “It Depends”: Some Comments of the Gergen-Schlenker Debate. Pers. Soc. Psychol. Bull. 1976, 2, 404–410. [Google Scholar] [CrossRef]
- Gergen, K. Social psychology, science and history. Pers. Soc. Psychol. Bull. 1976, 2, 373–383. [Google Scholar] [CrossRef]
- Weick, K. Theory construction as disciplined reflexivity: Tradeoffs in the 90s. Acad. Manag. Rev. 1999, 24, 797–806. [Google Scholar]
- Sterman, J. Modeling managerial behavior: Misperceptions of feedback in a dynamic decision making experiment. Manag. Sci. 1989, 35, 321–339. [Google Scholar] [CrossRef]
- Simon, H. Models of Bounded Rationality: Empirically Grounded Economic Reason; MIT Press: Cambridge, MA, USA, 1982. [Google Scholar]
- Slovic, P.; Lichtenstein, S. Preference reversals: A broader perspective. Am. Econ. Rev. 1983, 73, 596–605. [Google Scholar]
- Kleinmuntz, D. Cognitive heuristics and feedback in a dynamic decision environment. Manag. Sci. 1985, 31, 680–702. [Google Scholar] [CrossRef]
- Miller, J.; Page, S. Complex Adaptive Systems: An Introduction to Computational Models of Social Life: An Introduction to Computational Models of Social Life; Princeton University Press: Newark, NJ, USA, 2009. [Google Scholar]
- Russell, S.; Norvig, P.; Canny, J.; Malik, J.; Edwards, D. Artificial Intelligence: A Modern Approach; Prentice Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Luck, M.; D’Inverno, M.; Munroe, S. Autonomy: Variable and generative. In Agent Autonomy; Springer: Berlin, Germany, 2003; pp. 1235–1240. [Google Scholar]
- Cañamero, L. Designing emotions for activity selection in autonomous agents. Emot. Hum. Artifacts 2003, 115, 148–153. [Google Scholar]
- Balkenius, C. The roots of motivation. In Proceedings of the Second International Conference on From Animals to Animats, Rome, Italy, 25–29 September 1993; pp. 513–520.
- Sloman, A. Motives, mechanisms, and emotions. Cogn. Emot. 1987, 1, 217–233. [Google Scholar] [CrossRef]
- Sloman, A.; Croucher, M. Why Robots Will Have Emotions. Available online: http://cogprints.org/705/ (accessed on 8 January 2016).
- Lent, M.V.; Laird, J.; Buckman, J. Intelligent agents in computer games. AAAI/IAAI 1999, 1999, 435–441. [Google Scholar]
- Senge, P.M. The Fifth Discipline: The Art and Practice of the Learning Organization, 1st ed.; Random House LLC: New York, NY, USA, 2006. [Google Scholar]
- Ford, F.A. Modeling the Environment: An Introduction to System Dynamics Models of Environmental Systems; Island Press: Washington, DC, USA, 1999. [Google Scholar]
- Busemeyer, J.R.; Townsend, J. Decision field theory: A dynamic-cognitive approach to decision making in an uncertain environment. Psychol. Rev. 1993, 100, 432–442. [Google Scholar] [CrossRef] [PubMed]
- Ashby, F. A Stochastic Version of General Recognition Theory. J. Math. Psychol. 2000, 44, 310–329. [Google Scholar] [CrossRef] [PubMed]
- Kiyosi, I. Sample Paths for a Diffusion Process; Wiley Online Library: Hoboken, NJ, USA, 2010. [Google Scholar]
- Donnart, J.; Meyer, J. A hierarchical classifier system implementing a motivationally autonomous animat. Anim. Animat. 1994, 3, 144–153. [Google Scholar]
- Tyrrell, T. The use of hierarchies for action selection. Adapt. Behav. 1993, 1, 387–420. [Google Scholar] [CrossRef]
- Schmidt, B. Modelling of Human Behaviour The PECS Reference Model; SCS Publications: Erlangen, Germany, 2002. [Google Scholar]
- Silverman, B.; Cornwell, J.; O’Brien, K. Human performance simulation. Methods Hum Perform. 2003, 2003, 285–290. [Google Scholar]
- Silverman, B.; Bharathy, G. Human behavior models for agents in simulators and games: Part II: Gamebot engineering with PMFserv. Teleoper. Virtual Environ. 2006, 15, 163–185. [Google Scholar] [CrossRef]
- Silverman, B.G.; Johns, M.; Cornwell, J.; O’Brien, K. Human behavior models for agents in simulators and games: Part I: enabling science with PMFserv. Teleoper. Virtual Environ. 2006, 15, 139–162. [Google Scholar] [CrossRef]
- Magnenat-Thalmann, N.; Thalmann, D. Handbook of Virtual Humans; Wiley Online Library: Hoboken, NJ, USA, 2005. [Google Scholar]
- Größler, A.; Schieritz, N. Of Stocks, Flowa, Agents and Pules—ÃćËŸA ISimulations AIJStrategicÃćËŸ in Supply Chain Research. In Research Methodologiesin Supply Chain Management; Physica-VerlagHD: Mannheim, Germany, 2005; pp. 1691–1696. [Google Scholar]
- Wurtman, R.; Fernstrom, J. Control of brain neurotransmitter synthesis by precursor availability and nutritional state. Biochem. Pharmacol. 1976, 25, 1691–1696. [Google Scholar] [CrossRef]
- Deutch, A.; Roth, R. Neurotransmitters. Fundam. Neurosci. 1999, 5, 1–13. [Google Scholar]
- Perry, E.; Ashton, H.; Young, A. Neurochemistry of Consciousness: Neurotransmitters in Mind; John Benjamins Publishing: Amstel dam, Holland, 2002. [Google Scholar]
- Kadleček, D.; Nahodil, P. New hybrid architecture in artificial life simulation. In Advance in Artificial Life; Springer: Berlin, Germany, 2001. [Google Scholar]
- Moxnes, E.; Alessi, S. Testing training programs to limit binge drinking. In Proceedings of the 32nd International Conference of the System Dynamics Society, Delft, The Netherlands, 20–24 July 2014; pp. 1–27.
- Moxnes, E.; Jensen, L. Drunker than intended: Misperceptions and information treatments. Drug Alcohol Depend. 2009, 105, 63–70. [Google Scholar] [CrossRef] [PubMed]
- Biedermann, D.; Dietrich, F.; Handel, O.; Kielar, P.M.; Seitz, M. Using Raspberry Pi for Scientific Video Observation of Pedestrians During a Music Festival; Technical Report; Technische Universität München, Intitut für Informatik: München, Germany, 2015. [Google Scholar]
- Handel, O.; Gümüs, E.; Papoutsis, E.; Amann, J. Dynamic Visualization of Pedestrian Simulation Data. Forum Bauinf. 2015, 2015, 1–9. [Google Scholar]
- Büchele, D. Visualisierung von Fußgängersimulationsdaten auf Basis Einer 3D-Game-Engine. Ph.D. Thesis, Technische Universität München, München, Germany, 2014. [Google Scholar]
- Meadows, D. Leverage Points: Places to Intervene in a System. Solut. Sustain. Desir. Future 1999, 91, 78–84. [Google Scholar]
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Handel, O. Modeling Dynamic Decision-Making of Virtual Humans. Systems 2016, 4, 4. https://doi.org/10.3390/systems4010004
Handel O. Modeling Dynamic Decision-Making of Virtual Humans. Systems. 2016; 4(1):4. https://doi.org/10.3390/systems4010004
Chicago/Turabian StyleHandel, Oliver. 2016. "Modeling Dynamic Decision-Making of Virtual Humans" Systems 4, no. 1: 4. https://doi.org/10.3390/systems4010004
APA StyleHandel, O. (2016). Modeling Dynamic Decision-Making of Virtual Humans. Systems, 4(1), 4. https://doi.org/10.3390/systems4010004