Abstract
A LoRaWAN application architecture comprises three functional components: (i) nodes, which convert and wirelessly transmit data as LoRaWAN messages; (ii) gateways, which receive and forward these transmissions; and (iii) network servers, which process the received data for application delivery. The nodes convert data into LoRaWAN messages and transmit them wirelessly with the hope that one or more LoRaWAN gateway will receive the messages successfully. Then, the gateways pass on the received messages to a distant network server, where various processing steps occur before the messages are forwarded to the end application. If none of the gateways can receive the messages, then they will be lost. Although this default behaviour is suitable for some applications, there are others where ensuring messages are successfully delivered at a higher rate would be helpful. One such scenario is the application in this paper: monitoring maritime vessels and fishing equipment in offshore environments characterised by intermittent or absent shore connectivity. To address this challenge, the Custodian project was initiated to develop a maritime monitoring solution with enhanced connectivity capabilities. Two additional features are especially welcome in this scenario. The most important feature is the transmission of messages created in offshore areas to end users who are offshore, regardless of the unavailability of the ground network server. An example would be fishermen who are offshore and wish to position their fishing equipment, also offshore, based on location data transmitted from nodes via LoRaWAN, even when both entities are far away from the mainland. The second aspect concerns the potential use of gateway-to-gateway communications, through gateways on various ships, to transmit messages to the coast. This setup enables fishing gear and fishing vessels to be monitored from the coast, even in the absence of a direct connection. The functional constraints of conventional commercial gateways necessitated the conceptualisation and implementation of C-Mesh, a novel relay architecture that extends LoRaWAN functionality beyond standard protocol implementations. The C-Mesh integrates with the Custodian ecosystem, alongside C-Beacon and C-Point devices, while maintaining transparent compatibility with standard LoRaWAN infrastructure components through protocol-compliant gateway emulation. Thus, compatibility with both commercially available nodes and gateways and those already in deployment is guaranteed. We provide a comprehensive description of C-Mesh, describing its hardware architecture (communications, power, and self-monitoring abilities) and data processing ability (filtering duplicate messages, security, and encryption). Sea trials carried out on board a commercial fishing vessel in Sesimbra, Portugal, proved C-Mesh to be effective. Location messages derived from fishing gear left at sea were received by an end user aboard the fishing vessel, independently of the network server on land. Additionally, field tests demonstrated that a single C-Mesh deployment functioning as a signal repeater on a vessel with an antenna elevation of above sea level achieved a quantifiable coverage extension of 13 km (representing a 20% increase in effective transmission range), demonstrating the capacity of C-Mesh to increase LoRaWAN’s coverage.
1. Introduction
The tracking of fishing operations is an essential aspect of the maritime environment, required for the sustainable management of resources and to ensure adherence to regulations. At present, Vessel Monitoring Systems (VMS) are only compulsory for big vessels, and a significant proportion of the fishing fleet remains outside these monitoring systems [1]. The absence of monitoring capabilities discourages the efficient management of fisheries and makes it more difficult to prevent illegal, unreported, and unregulated (IUU) fishing.
One of the other central concerns is the loss of fishing gear that is observed in the water because this is a cause of marine pollution and can hurt marine life through ghost fishing [2]. The proper monitoring of fishing gear would mitigate the damage, but current measures are either too costly or too inconvenient to be used on a large scale, especially in small-scale fisheries. All of these challenges stress the necessity for cost-effective solutions, and the application of Internet of Things (IoT) technologies as a means of monitoring in the maritime context has become an increasingly addressed topic, particularly in the fishing sector [3] for small- and medium-scale fishing vessels. These issues were addressed through the Custodian project1, a collaborative effort that leveraged systems engineering methodologies to develop an integrated solution. The objective of the project was to create a number of interconnected components that function together, as demonstrated in Figure 1. Three economically viable devices were created for mounting on fishing equipment and vessels, enabling a coupled monitoring capability both locally (on the sea) and remotely (onshore) in a combined system architecture. As illustrated in Figure 2, three different devices were developed.
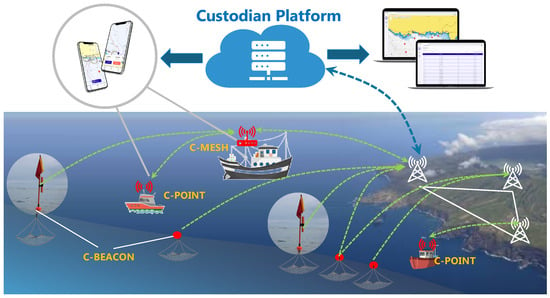
Figure 1.
Custodian architecture.
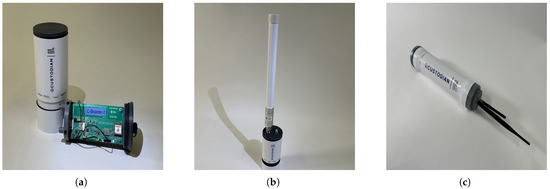
Figure 2.
Custodian devices: (a) C-Beacon; (b) C-Point; (c) C-Mesh.
- C-Beacon is a device designed to be attached to fishing gear and could be left at sea for several days. This device works as a regular LoRaWAN node.
- C-Point is a device to be installed on ships, allowing for their tracking and enabling C-Beacon location information to be requested from land. This information is then relayed to the end user (e.g, on a mobile phone) using Bluetooth Low-Energy (BLE).
- C-Mesh is also installed on ships and fulfils two main functions, providing at-sea coverage (normal gateway behaviour) and communication with the land, working as a relay between C-Beacons and C-Points and the land when there is no direct coverage by taking advantage of the more favourable location of the vessel’s antenna.
Conventional LoRaWAN gateways use high-data-rate technologies (both wired and wireless) to relay data to a back-end management infrastructure. As this high-data-rate technology is not available at sea (except through costly satellite communications), to keep costs low, the communication with land will also use LoRaWAN. This option poses several technical challenges since the available data rate will be very low, and a careful and optimised handling of the data within C-Mesh is necessary. The focus of this paper will therefore be on a description of the C-Mesh device.
Specifically, this research has the following aims:
- Designing and implementing a cost-effective LoRaWAN relay system, known as the C-Mesh, capable of adapting to marine environments, as well as existing vessel operations and traditional LoRaWAN devices.
- Extending the coverage of LoRaWAN beyond the existing coastal zone.
- Establishing an active network designed to facilitate the ongoing monitoring of fishing gear and vessels in the marine ecosystem.
- Facilitating local data delivery to vessel operators, establishing an effective information flow that provides real-time access to critical data even in areas without direct shore-based network coverage.
- Enhancing the tracking capabilities of fishing gear, particularly buoys, to reduce fishing gear loss and mitigate environmental impacts.
- Developing a full system that integrates seamlessly with existing fishing operations, requiring minimal technical expertise from end-users while maintaining robust functionality.
- Evaluating the performance, reliability, and efficiency of the integrated system in real-world maritime conditions through extensive field testing.
- Assessing the potential of the proposed solution to improve fisheries management, particularly for small-to-medium-scale fishing operations, considering both technical and socio-economic factors.
These research objectives address the propagation constraints and coverage discontinuities inherent to LoRaWAN implementations in maritime IoT deployments while creating a sustainable and efficient system that benefits all stakeholders in the fishing industry ecosystem.
The onshore component of the Custodian network consists of standard LoRaWAN gateways connected to The Things Network [4], providing a robust and expansive coverage area. This infrastructure, combined with the C-Mesh devices deployed on fishing vessels, creates a dynamic and far-reaching network that extends LoRaWAN coverage well beyond coastal areas.
The C-Mesh device integrates several key technologies to achieve its functionality as a maritime LoRaWAN relay. At its core, the device utilises LoRa (Long Range) technology, a spread spectrum modulation technique derived from Chirp Spread Spectrum (CSS) modulation, offering long-range communication capabilities with low power consumption, making it particularly suitable for IoT applications in challenging environments [5].
The LoRaWAN protocol, built on top of LoRa, provides a Media Access Control (MAC) layer for managing communication between Low Power Wide Area Network (LPWAN) gateways and end-node devices [6]. In our implementation, we followed LoRaWAN’s Class A device specifications for energy-efficient uplink-centric communication, while the C-Mesh itself operates continuously, similar to a LoRaWAN gateway.
To ensure accurate positioning, the C-Mesh incorporates a Global Navigation Satellite System (GNSS) module, utilising both GPS and Galileo constellations for enhanced accuracy and reliability in maritime environments.
The software stack of the C-Mesh is built on open-source components, including the LoRa gateway bridge for packet forwarding and a custom-developed python-based packet processor and relay. These components have been customised to support our unique relay architecture and integration with the C-Point device.
Data security is ensured through the built-in Advanced Encryption Standard with a 128-bit key (AES-128), as specified in the LoRaWAN protocol. We have extended this with additional layers of security to protect the relay functionality and ensure data integrity throughout the communication chain.
The remainder of this paper is organised as follows: Section 2 provides a detailed review of related work. Section 3 presents a detailed description of the C-Mesh device architecture, including hardware components, software stack, and integration with the Custodian platform. The message processing and filtering mechanisms implemented in the C-Mesh, covering aspects such as device identification, message decryption, and duplicate handling, are detailed in Section 4. Section 5 outlines the experimental setup and methodology used for field tests and presents the results of our performance evaluation, including communication range and reliability metrics. Finally, Section 6 concludes the paper, summarising key findings, discussing the limitations of the current study, and proposing directions for future research in this field.
2. Related Work
Maritime operations present unique challenges that require integrated solutions spanning multiple technological and operational domains. The following sections explore how different approaches address these systemic challenges, examining the interplay between communication technologies, monitoring systems, and operational requirements in maritime environments.
2.1. Maritime Systems as Complex Socio-Technical Environments
Maritime operations constitute multi-dimensional complex adaptive systems characterised by dynamic equilibria between technological infrastructures, human–system interactions, environmental parameters, and regulatory governance frameworks, demonstrating emergent properties that transcend individual component behaviours. As highlighted by [7], these systems must balance multiple competing demands: operational efficiency, safety requirements, environmental protection, and economic viability. The introduction of Internet of Things (IoT) technologies has added new layers of complexity to these already intricate systems, creating both opportunities and challenges for system integration and management.
The systemic nature of maritime operations becomes particularly evident in fishing activities, where [8] demonstrates how IoT technologies must adapt to existing operational patterns while simultaneously influencing how these operations evolve. Their work shows how the introduction of new monitoring capabilities creates feedback loops that affect fishing behaviour, regulatory compliance, and resource management decisions. This dynamic interaction between technology adoption and operational practices highlights the need for solutions that consider both technical capabilities and human factors.
The challenges facing maritime IoT systems are multifaceted and interconnected. In [9], the authors identify several critical system boundaries and constraints, including limited connectivity in offshore areas, harsh environmental conditions, and the need for energy-efficient solutions. These constraints do not exist in isolation but interact with each other, creating emergent challenges that require integrated solutions rather than point fixes. For instance, the need for extended battery life in remote deployments must be balanced against the requirement for reliable communication in challenging environmental conditions.
In recent years, the focus has shifted toward more holistic approaches to maritime system design. The work in [10] observes that technological adoption in small-scale fisheries faces multiple interconnected barriers, including not just technical limitations but also economic constraints, operational practices, and social factors. This understanding has led to the development of solutions that address the system as a whole rather than individual components, recognising that successful implementation requires consideration of both technical and non-technical factors.
The integration of IoT technologies in maritime environments has also highlighted the importance of adaptive system architectures. Research by [7] emphasises how successful maritime IoT deployments must be capable of responding to changing environmental conditions, operational requirements, and regulatory frameworks. This adaptability is particularly critical in fishing operations, where vessels may operate across different jurisdictions and face varying environmental challenges.
Emerging research in this field increasingly recognises the role of edge computing and distributed intelligence in maritime systems. The work of [8] discusses how local processing capabilities can enhance system resilience and reduce dependence on continuous connectivity. This approach acknowledges the unique characteristics of maritime environments, where intermittent communication and varying operational conditions require systems that can function autonomously while maintaining integration with broader monitoring and management frameworks.
2.2. Communication Systems in Maritime Environments
The maritime communication ecosystem comprises multiple interacting technologies and protocols, each addressing specific needs within the broader system. Within this ecosystem, LoRaWAN has emerged as a particularly promising component, which [11] demonstrates in their comprehensive analysis of system-wide communication requirements. Their work highlights how different communication technologies require and complement each other to create robust maritime monitoring solutions.
The empirical investigation conducted by [12] elucidates the complex interactions between communication system performance and environmental factors in maritime contexts. Their nearshore experiments achieved LoRaWAN communication over distances up to 130 km from shore, demonstrating how system placement and environmental conditions create emergent properties that affect overall performance. However, they also noted significant performance degradation beyond this range, highlighting the need for adaptive solutions that can maintain connectivity in challenging conditions. These coverage challenges are not unique to maritime environments, as [13] demonstrates in their analysis of LoRaWAN deployments in dense urban areas, where increasing the spreading factor alone may not sufficiently address coverage issues, suggesting the need for more comprehensive system-level solutions.
The work of [14] approaches maritime communication as an adaptive system, proposing optimised duty cycle strategies for LoRaWAN-based sensors in isolated areas with intermittent gateway presence. Their research demonstrates how individual components can be designed to respond to system-level constraints, such as power limitations and network availability. By implementing this optimised strategy, nodes achieve extended lifespans while maintaining effective data collection in Delay Tolerant Network (DTN) scenarios, showing how system-level thinking can improve component performance.
A systematic approach to maritime communication system design is presented in [15], where researchers developed a LoRaWAN infrastructure for monitoring offshore sea farms. Their system exemplifies the integration of fixed and mobile components, combining stationary nodes on buoys with mobile data collection through remotely operated underwater vehicles. Field tests in harsh marine environments demonstrated reliable communication over distances exceeding 8 kilometres, with a packet reception rate of 87.33% and a mean link margin of 13.66 dB at Spreading Factor 7 (SF7). These results illustrate how carefully designed system architectures can achieve robust performance even under challenging environmental conditions.
The evolution of maritime communication systems has also seen the emergence of hybrid architectures that combine multiple technologies. The work in [16] introduces a model that integrates LoRa Mesh and LoRaWAN technologies, demonstrating how different networking approaches can be combined to enhance overall system performance. Their proxy node concept shows how intermediary components can bridge different communication subsystems while maintaining security and efficiency.
Researchers have demonstrated the applicability of LoRaWAN in challenging environments in various urban scenarios. In [17], a comprehensive trial of LoRaWAN technology for urban waste management showed successful operations even with significant signal obstructions and penetration losses of up to 26 dB through metallic containers, suggesting the technology’s robustness for maritime applications where similar challenging propagation conditions are expected.
Recent developments in satellite integration, as explored by [18], show how maritime communication systems are evolving to incorporate space-based components. Their investigation of LoRaWAN Direct-to-Satellite (DtS-IoT) networks demonstrates the potential for extending system coverage through Low Earth Orbit (LEO) satellites. Their findings on channel optimisation and beacon interval management highlight how system-level adjustments can significantly improve communication performance in integrated satellite–terrestrial networks.
These advancements in maritime communication systems demonstrate a clear trend toward more integrated, adaptive solutions that can respond to the unique challenges of marine environments. The successful deployment of these systems requires careful consideration of multiple interacting factors, including the following:
- Environmental conditions and their impact on signal propagation;
- Power consumption and energy efficiency requirements;
- Network topology and its adaptation to mobile nodes;
- Integration of different communication technologies;
- System reliability and redundancy mechanisms;
- Scalability across different operational scenarios.
As maritime IoT applications continue to evolve, the need for robust, integrated communication solutions becomes increasingly critical. The research shows that successful systems must balance technical performance with operational requirements while maintaining the flexibility to adapt to changing conditions and needs.
2.3. Integrated Monitoring Systems for Fisheries Management
Fishing vessel monitoring represents a complex system where technological infrastructure, regulatory frameworks, and operational behaviours intersect to create effective fisheries management. Traditional VMS, as described by [19], rely primarily on satellite-based systems. While these systems effectively serve large-scale commercial operations, they create systemic inequalities due to cost barriers for smaller operators [20]. This limitation highlights how technological choices in system design can have broader socio-economic impacts on the fishing industry.
Recent developments show a shift toward more integrated approaches that consider the diverse needs of different fleet segments. The work of [21] demonstrates how combining low-cost GPS trackers with cellular networks creates new possibilities for near-shore fishing vessel tracking. Their system, tested in small-scale Indonesian fisheries, achieved more frequent position updates than traditional VMS while significantly reducing operational costs. This approach exemplifies how system design can address both technical and economic constraints simultaneously.
A multi-functional implementation example of system integration is presented by [22], who developed a LoRaWAN-based tracking system for both motorised and non-motorised Bangka ships. Their system demonstrates the potential for comprehensive monitoring solutions that integrate multiple functions: location tracking, water level sensing for automatic distress signalling, and manual emergency alerts. By achieving stable transmissions up to 3.67 km, their work shows how integrated systems can enhance both operational efficiency and safety in small-scale fisheries.
Furthermore, the integration of multiple data streams within these monitoring systems has enabled more sophisticated analysis capabilities. In [23], the authors present the developed methods for combining VMS data with daily catch information, enabling high-resolution spatial analysis of fishing activities. This integration demonstrates how combining different data sources can provide deeper insights into fishing patterns and resource utilisation, supporting both scientific understanding and management decisions. Their approach allows for more accurate time series analysis of fishing patterns, improved identification of fishing métiers, better monitoring of spatial closures, and enhanced understanding of resource distribution.
Recent work by [24] emphasises the importance of developing standardised procedures for analysing high-resolution tracking data in small-scale fisheries (SSF). Their research highlights how system efficacy, as measured through spatio-temporal resolution parameters and classification accuracy metrics, depends on the interplay between temporal resolution of data collection, robust pre-processing methods, and appropriate classification models. The authors stress the importance of integrating these technical elements with local fishing practices, supported by expert validation procedures and comprehensive assessment of both error measures and fishing effort indicators. This holistic approach demonstrates the need for flexible frameworks that can adapt to different local contexts while maintaining system integrity.
The evolution of monitoring systems has also highlighted the importance of data verification and complementary monitoring approaches. The empirical investigation conducted by [25] demonstrates how the integration of satellite imagery analysis with traditional VMS data can help address issues of data gaps and potential tampering. This multi-modal approach to monitoring creates a more robust and reliable system while providing mechanisms for cross-validation of fishing activity data.
The development of integrated monitoring systems must address several interconnected challenges. These include the establishment of optimal balance between comprehensive coverage and cost-effectiveness, the assurance of system accessibility across diverse fleet segments, and the maintenance of high data quality across different collection methods. Additionally, these systems must support both compliance monitoring and scientific research needs while adapting to evolving regulatory requirements. A particularly crucial challenge lies in protecting sensitive commercial information while enabling effective tracking of fishing activities.
These systemic challenges underscore the need for adaptive system architectures that can evolve with technological capabilities and management requirements while remaining accessible to all fleet segments. The trend toward integrated monitoring solutions demonstrates how system-level thinking can address multiple objectives simultaneously, creating more effective and equitable fisheries management tools.
2.4. Adaptive Network Architectures in Maritime Applications
Maritime environments require network architectures that can adapt to changing conditions and operational requirements while maintaining system reliability. The work of [26] presents two complementary LoRaWAN–satellite convergence architectures that demonstrate how different system components can be integrated to extend coverage and enhance reliability. Their indirect architecture takes advantage of local gateways on vessels or fixed offshore structures with satellite back-haul, enabling local data aggregation and processing while reducing satellite communication costs. The direct architecture, featuring LoRaWAN gateways mounted on low-Earth-orbit satellites, offers broader coverage but introduces additional challenges in power management and Doppler compensation.
The comprehensive review by [27] examines how unmanned systems can be integrated into aquaculture monitoring, highlighting the importance of selecting appropriate technologies for different environmental contexts. Their analysis demonstrates how various unmanned vehicles (aerial, surface, and underwater) can work together to perform tasks such as water quality assessment, fish behaviour observation, and site surveillance. The authors emphasise how system success depends on the careful consideration of battery life limitations, weather conditions, and regulatory requirements, illustrating the complex interplay between technical capabilities and operational constraints.
Network extension architectures continue to evolve through approaches documented by [28], where UAV-based LoRaWAN gateways create dynamic coverage solutions. Their implementation of a flying gateway demonstrates how mobile network components can adapt to changing coverage requirements, collecting data from IoT sensors during flight and storing it for later transmission. This approach shows promising results at distances up to 760 m, with resource consumption being compatible with typical UAV flight durations, highlighting how adaptive architectures can provide flexible solutions for remote monitoring needs.
Research into hybrid heterogeneous network topologies has produced particularly interesting results, as shown in [16]. Their work combines LoRa Mesh and LoRaWAN technologies through a Proxy node design that bridges different network paradigms. Each mesh node maintains a unique virtual LoRaWAN identity, enabling distinct identification within the LoRaWAN back-end while benefiting from mesh networking capabilities. The Proxy node’s role in aggregating data and managing security demonstrates how architectural components can be designed to support both local mesh communication and broader network integration.
The investigation of LoRaWAN direct-to-satellite networks by [18] reveals how system optimisation can be achieved through careful consideration of multiple interacting factors. Their research shows that performance improvements can be realised through parametric optimisation of channel numbers and beacon intervals. Their study also examines how the placement of network server functionality, whether on satellites or ground stations, affects overall system latency and reliability. These findings demonstrate the importance of understanding system-level interactions when designing network architectures for maritime applications.
Current research trends indicate an increasing focus on optimising these systems for maritime use, with particular attention paid to power efficiency, data compression techniques, and environmental hardening. The development of robust, weatherproof hardware suitable for marine environments remains a critical concern, as does the need for standardisation of maritime IoT protocols to ensure interoperability between different systems and regions. These developments are particularly relevant as regulatory frameworks evolve, with the EU moving toward mandatory tracking for all fishing vessels, including those under 12 m [1].
The advancement of adaptive network architectures in maritime environments demonstrates a clear trend toward more flexible and resilient solutions. These architectures must balance multiple competing demands: maintaining connectivity in challenging conditions, supporting various operational requirements, ensuring data security, and remaining cost-effective for diverse users. Empirical evidence from the reviewed implementations confirms that system efficacy is contingent upon both technical performance metrics and socio-technical integration factors.
2.5. Systems Integration Challenges and Future Directions
The review of current research reveals several fundamental challenges in developing integrated maritime monitoring systems, particularly for small-scale fisheries. These challenges emerge from the complex interactions between technical capabilities, operational requirements, and environmental constraints. Integration challenges in maritime IoT systems require careful consideration of both technical architecture and operational contexts, particularly when dealing with diverse user groups and varying environmental conditions.
Scalability and cost-effectiveness represent primary concerns in system development, especially when considering the diverse nature of fishing operations. Studies of small-scale fisheries demonstrate how economic barriers can prevent the adoption of monitoring technologies, creating a digital divide in the maritime sector [21]. This challenge is compounded by the need to maintain system reliability in harsh maritime environments, where equipment must withstand extreme conditions while operating with limited power resources. Recent investigations into unmanned maritime systems highlight how these environmental factors significantly influence system design choices, from hardware specifications to communication protocols [12].
As a direct consequence of economic heterogeneity in maritime operations, data standardisation and interoperability emerge as critical challenges in system integration, particularly as maritime IoT networks become more complex. Research into fishing effort estimation demonstrates how the combination of different data sources can enhance system capabilities but also highlights the technical challenges in harmonising data from diverse sources [25]. This integration becomes particularly crucial as systems evolve to incorporate new sensors, communication technologies, and analytical capabilities.
Security and privacy considerations constitute an additional dimension of systemic complexity in system integration. Recent developments in hybrid network architectures demonstrate that implementing secure communication in maritime environments requires careful balance between protection of sensitive information and operational efficiency [18]. This becomes particularly relevant when systems must comply with varying regulatory requirements across different jurisdictions while maintaining consistent performance and reliability.
The evolution of maritime monitoring systems also faces challenges in socio-technical integration parameters, including operational proficiency development and technological familiarisation processes. Studies of technology adoption in fishing communities emphasise the importance of developing systems that can be effectively operated within existing fishing practices [22], highlighting how technical solutions must be designed with user capabilities and operational patterns in mind. This human-centred aspect of system integration often proves as crucial as technical performance in determining overall system success.
Prospective analysis of technological trajectories indicates promising directions for addressing these integration challenges. The development of adaptive network architectures incorporating UAV-based solutions, characterised by dynamic topology reconfiguration capabilities and multi-modal communication redundancy indicates potential pathways for creating more flexible and resilient systems [28]. Similarly, the integration of edge computing capabilities offers new possibilities for balancing local processing needs with broader system connectivity.
The future development of maritime monitoring systems will likely require increased focus on creating adaptive, integrated solutions that can evolve with technological capabilities while remaining accessible to diverse user groups. This evolution must consider not only technical performance but also economic feasibility, operational practicality, and regulatory compliance. As maritime IoT systems continue to mature, the success of new developments will increasingly depend on their ability to address these systemic challenges while providing tangible benefits to all stakeholders in the maritime environment.
The EU’s movement toward mandatory tracking for all fishing vessels, including those under 12 m, adds urgency to these integration challenges while also providing opportunities for innovation in system design. This regulatory evolution emphasises the need for solutions that can scale effectively while maintaining reliability and accessibility across diverse operational contexts. The successful development of such systems will require continued attention to both technical integration and operational requirements, ensuring that solutions remain practical and effective for all segments of the fishing industry.
2.6. Comparative Analysis of Maritime Connectivity Solutions
The development of the C-Mesh approach emerged from a systematic evaluation of connectivity alternatives for offshore fishing operations intermingled with the requirements obtained from fishermen during the requirements phase. Rather than attempting to overcome limitations of conventional approaches, the design represents a solution that reflects this adaptation to the operational realities of maritime fishing in these small vessel communities of fishermen.
Shore-based coverage expansion, while theoretically straightforward, is constrained by radio frequency propagation limitations imposed by Earth’s curvature, restricting reliable connectivity to approximately 40 km offshore, inadequate for fishing operations that routinely extend 60–80 km from shore. Our previous work showed that 130 km were possible, but only on locations where a high altitude gateway is possible [12].
Emerging satellite-LoRa solutions address the coverage limitation but introduce financially unsustainable operational cost structures for small-scale fisheries. Cost–benefit analysis revealed that satellite subscription models (with monthly payments per device) would constitute a significant effort for typical small fishing operations.
The proposed C-Mesh architecture presents a middle path optimised for this specific operational context. By leveraging existing vessel movements as mobile infrastructure, the system creates coverage that naturally follows fishing activities. The per-vessel cost remains viable for smaller operations, hardware implementation targets a unit production cost below 100 EUR per device (with no installation included). While the technical architecture provides operational flexibility, the shore-based infrastructure management model introduces additional dimensions of adaptability, permitting deployment under various administrative paradigms: vessel owner consortia, municipal/governmental bodies, or commercial service providers.
The C-Mesh deployment model generates exponential connectivity benefits characterisable through network effect models, where connectivity value increases proportionally to , with n representing the number of equipped vessels; each additional equipped vessel improves connectivity for the entire fishing community, encouraging cooperative adoption within regional fishing fleets. This collaborative characteristic proves particularly valuable in fishing communities where resource sharing and mutual support already exist as operational norms.
3. System Architecture
This section presents the system architecture, focusing primarily on the C-Mesh device’s functionality as a relay node with extended LoRaWAN network coverage capabilities. The analysis encompasses (i) hardware configuration; (ii) installation parameters; (iii) communication protocols; (iv) data flow architecture; (v) integration framework; (vi) message processing mechanisms; and (vii) security implementations.
It is important to note that while the C-Mesh functions as a relay, it differs from the standard LoRaWAN relay defined in recent technical specifications [6,29]. The C-Mesh has a continuous power supply, available on fishing vessels, allowing it to remain online permanently. This unique characteristic enables the C-Mesh to support standard LoRaWAN devices without requiring them to be relay-compatible, a feature typically necessary for devices in a relay network, thus significantly expanding the range of LoRaWAN-compatible devices.
3.1. Hardware Components
The C-Mesh prototype implementation, illustrated in Figure 2c, integrates three primary functional components within a unified architectural framework. The computational subsystem employs a Raspberry Pi 4 model B Rev 1.5 (1.5GHz quad-core ARM Cortex-A72) with 2GB LPDDR4 SDRAM and 256GB non-volatile storage, providing sufficient processing capacity for concurrent packet management, cryptographic operations, and persistent data storage. This unit manages the software stack, communication protocols, and data processing tasks. For LoRaWAN communication, the device integrates a Dragino LoRaWAN Concentrator HAT PG1302. This module includes a Semtech SX1302 LoRa Concentrator. This chip supports multi-channel, multi-data rate LoRa packet reception, enabling simultaneous communication with multiple end devices [30]. Finally, a third module is a LoRaWAN node module, based on Semtech SX1276. The LoRA concentrator works as a gateway and the LoRa node will be used to relay LoRa messages. Within the Custodian, two solutions were implemented. A first prototype, where the LoRa node functions are accomplished with a FiPy module, from Pycom (shown in Figure 3). Subsequently, a second prototype was built where the FiPy module was replaced by the hardware of a C-Point device mentioned before. Communication between the Raspberry Pi and both LoRa node modules is achieved through a standard serial Universal Asynchronous Receiver/Transmitter (UART) port.

Figure 3.
Tear-down view of the first C-Mesh prototype.
To optimise signal reception and transmission, the C-Mesh device employs external antennas. The antenna used in the C-Mesh was a commercially available Mikrotik LoRa Antenna with a 6.5 dBi gain. During measurements, the device was installed at an elevated position on the vessel’s mast, providing a clear line-of-sight to the surrounding area, to ensure reliable communication with C-Beacons and the onshore Custodian platform while minimising obstructions from the vessel’s structure or other onboard equipment. Environmental protection was also considered in the installation process. Weatherproofing measures, including protective enclosures purposely developed to accommodate the hardware (as shown in Figure 3) and sealing techniques, were employed to safeguard the device against the myriad harsh marine conditions such as rain, heat, and saltwater exposure.
The C-Mesh has been designed for deployment on maritime vessels equipped with integrated power generation systems, such as medium-to-large-scale fishing vessels. These vessels provide a continuous electrical output through onboard generators or alternative power infrastructure, thereby ensuring uninterrupted operational capability of the C-Mesh system without energy constraints. For maritime platforms lacking dedicated power generation facilities, the Custodian system architecture incorporates an alternative solution, the C-Point device, which has been optimised in order to operate with reduced power consumption. This complementary device, without the mesh networking capabilities to preserve energy efficiency, demonstrates particular suitability for battery-dependent operational contexts where power conservation represents a critical design parameter.
3.2. Communication Protocols and Data Flows
A combination of different communication protocols and data flow mechanisms was used to facilitate seamless connectivity and data exchange between C-Beacons, C-Points, C-Mesh, and the onshore Custodian platform. C-Mesh relies primarily on the LoRaWAN protocol to communicate with C-Beacons deployed on the fishing gear, thus allowing C-Mesh to receive data packets over considerable distances. The C-Beacons periodically transmit data packets containing relevant information, such as position, battery level, and other sensor readings using the LoRaWAN protocol. The C-Mesh device, equipped with the LoRaWAN concentrator, processes these incoming packets accordingly. The use of the LoRaWAN protocol, which does not require a permanent connection, allows the C-Beacons to transition to low-power consumption states when not transmitting, thereby extending battery longevity, a critical requirement for maritime deployments.
To maintain the security and integrity of the data exchanged between C-Beacons and C-Mesh, the device follows the LoRaWAN standards for message encryption and decryption, ensuring that the data remains protected from unauthorised access. Message authentication and decryption follows a sequential processing pipeline: (i) integrity verification through Message Integrity Code (MIC) validation using the Network Session Key (NwkSKey, 128-bit AES); (ii) sender authentication via DevAddr validation against the authorised device registry; and (iii) payload decryption using the Application Session Key (AppSKey, 128-bit AES) in Counter Mode (CTR). Cryptographic material is maintained in a hardware-protected secure storage element to mitigate physical tampering risks in deployment environments.
In addition to the LoRaWAN protocol, C-Mesh establishes communication with the internal C-Point using a wired UART (Universal Asynchronous Receiver/Transmitter) connection, thus enabling a reliable and low-latency data exchange between the two devices. A proprietary communication protocol operating via UART was developed with defined message structures, command sets, and error-handling mechanisms to ensure deterministic data exchange. Using this protocol, C-Mesh can forward the decrypted C-Beacon messages to the C-Point, which, in turn, relays the information to the Custodian mobile app via BLE, as shown in Figure 4. Therefore, the internal C-Point acts as a bridge between C-Mesh and the Custodian mobile app, enabling data exchange and user interaction. This allows the vessel owner or operator to access real-time information about the location and status of the fishing buoys in their vicinity directly on their mobile device without the need of intervention of land infrastructure. Additionally, through the mobile app, the user can send commands back to the C-Mesh via the C-Point. This bidirectional communication enables remote management and control of the C-Mesh device, such as adjusting transmission intervals or updating security keys. Overall, the combination of LoRaWAN for C-Beacon communication and BLE for mobile app connectivity creates a robust and efficient data flow architecture, allowing for the real-time monitoring and management of fishing activities.
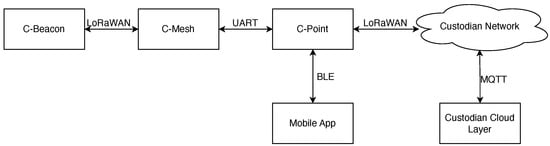
Figure 4.
Communication flows.
The implemented local data delivery architecture yields several operational advantages, quantifiable across multiple performance dimensions:
- Improved situational awareness: Vessel owners can monitor the location and status of their fishing buoys and vessels in real time, enabling them to make informed decisions and respond quickly to any anomalies or emergencies.
- Enhanced operational efficiency: With access to up-to-date information, vessel owners can optimise their fishing activities, reduce fuel consumption, and minimise the risk of lost or damaged equipment.
- Increased safety: Real-time monitoring and alerting capabilities provided by the C-Mesh device and the Custodian platform contribute to enhanced safety measures, allowing vessel owners to detect and respond to potential hazards promptly.
- Reduced reliance on onshore infrastructure: The C-Mesh device’s ability to relay messages and deliver data locally reduces the dependence on continuous connectivity to the onshore platform, ensuring that vessel owners can access critical information even in remote or disconnected areas.
3.3. Integration with the Custodian Platform
The data exchange protocol between system components follows a structured sequence with defined transmission pathways and processing stages. As well as handling data exchanged between C-Beacons or C-Mesh and a user mobile application, the C-Mesh can also relay messages to the onshore platform. Bidirectional communication via LoRaWAN facilitates both transmission and reception of data between the C-Mesh and the onshore platform. A C-Mesh can receive messages destined to specific C-Beacons or C-Points and forward them to the appropriate recipients. This enables features such as remote configuration, firmware updates, and control commands to be sent to the C-Beacons and C-Points, enhancing the overall flexibility and manageability of the Custodian platform. The data exchange process with the Custodian platform involves multiple stages, with C-Mesh playing a pivotal role in each step, as can be seen in Figure 5. When a C-Beacon generates data, it encapsulates the information in the LoRaWAN payload and transmits it to a C-Mesh device. Once the message is decrypted, the C-Mesh extracts the relevant data fields and prepares them for transmission to the C-Point. The decrypted data are packaged according to the custom Custodian protocol and sent over the UART connection to the C-Point. The C-Point, acting as a gateway, then forwards the data to land using LoRaWAN.
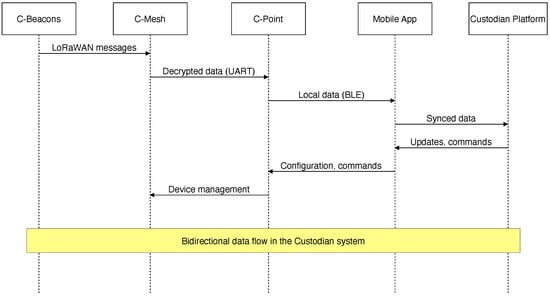
Figure 5.
Message flows.
3.4. Message Characteristics and Communication Requirements
The Custodian system supports multiple message types in order to fulfill the diverse communication requirements within the maritime operational context. Field tests of the C-Mesh device primarily focused on basic status messages (Port 10), which transport the data associated to tracking vessels and fishing gear.
Table 1 summarises the key message types supported by the Custodian system, indicating message direction (uplink/downlink) and their purpose.

Table 1.
Key message types in the Custodian system.
The payload architecture comprises a structured byte allocation framework: (i) battery level indicator (1 byte, range: 0–100%); (ii) device status indicators (2 bytes); and (iii) geospatial coordinates utilising compressed latitude (3 bytes) and longitude (3 bytes) parameters.
The transmission protocol implements periodic messages at intervals constrained by LoRaWAN duty cycle regulatory parameters, with an approximate periodicity of 5 min. Spreading factor 12 (SF12) was deliberately selected to establish optimal reception conditions for experimental evaluation. In operational implementations, transmission frequency parameters may be dynamically configured based on specific operational requirements and energy resource limitations.
Although the Custodian framework architecture supports transmission of complex message structures, including detailed catch reporting capabilities (facilitating documentation of up to 10 distinct marine species classifications across 10 market destinations) and variable-length textual communications (with capacity for 50-character payloads), our experimental evaluation methodology specifically concentrated on the relay functionality for fundamental positional and status data transmission. This methodological constraint facilitated the establishment of baseline performance metrics for the primary system assessment, maintaining the continuous location awareness of maritime vessels and associated fishing apparatus when operating beyond the geographical limitations of terrestrial network infrastructure.
3.5. Scalability Considerations
Fishing vessels and fishing gear typically maintain significant distances from one another, not only due to the naturally vast open area associated with the ocean but also because fishermen, trying to achieve competitive advantage, tend to develop their activities on non overlapping areas, based on individual preferences acquired with practice. While comprehensive scalability evaluation with multiple C-Mesh devices remains a direction for future research, preliminary analysis indicates that the spatial distribution characteristics of maritime operations may mitigate potential network congestion concerns.
Nevertheless, the C-Mesh architecture includes mechanisms with which to mitigate potential scalability issues while leveraging beneficial redundancy. Each C-Mesh device identifies the source of incoming messages, distinguishing between transmissions from C-Beacons/C-Points (belonging to the vessel owner or not) and those from other C-Mesh devices. When multiple C-Mesh devices receive the same C-Beacon transmission, this duplication possibly improves the probability of message delivery to the shore-based network, creating a form of spatial diversity that enhances system reliability, particularly in challenging maritime conditions. The Custodian cloud platform manages this redundancy by filtering duplicates based on message identifiers after they have served their purpose in improving delivery reliability.
4. Message Processing and Filtering
Message processing begins with classification according to a hierarchical authentication taxonomy comprising (i) authenticated owner-associated transmissions; (ii) authenticated non-owner transmissions; and (iii) non-authenticated or invalid protocol messages.
When a message is received by a C-Mesh device through its LoRaWAN concentrator, the first step in the processing pipeline is to identify if the message originates from a valid Custodian device; this identification process maintains the security and integrity of the Custodian platform and prevents unauthorised devices from injecting malicious data into the system. The Device Address (DevAddr) field present in the LoRaWAN message header is examined and checked against a local list of all valid Custodian device addresses. The DevAddr authentication procedure proceeds only after successful validation of the Message Integrity Code (MIC), ensuring message integrity verification precedes identity authentication. The DevAddr is a unique 32-bit identifier assigned to each Custodian device during the provisioning process.
If the DevAddr matches a registered Custodian device, the message is considered valid and proceeds to the next stage of processing. Conversely, if the DevAddr is unknown or not associated with a Custodian device, the message is discarded. The complete process is shown in Figure 6. Once a message is identified as originating from a valid Custodian device, the C-Mesh must decrypt the payload to access the underlying data only in the case of the C-Beacon belonging to the vessel’s owner. If it is a message from another C-Beacon, then the message is simply relayed back to the onshore network, as can be seen in Figure 7. In the Custodian platform, message encryption is performed using the AppSKey, a shared secret key specific to each device.
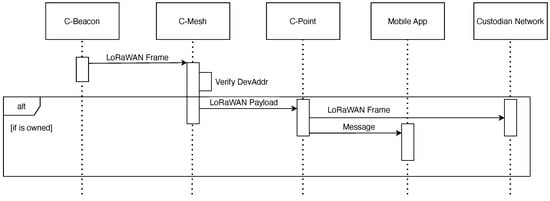
Figure 6.
Message relay to mobile app.
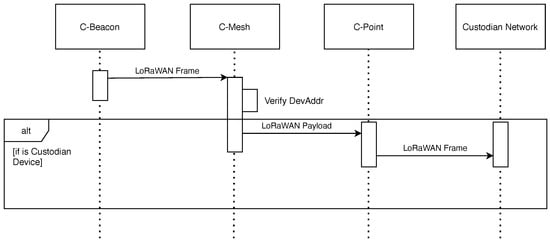
Figure 7.
Message relay to custodian network.
The C-Mesh device maintains a local, hardware-enforced, secure database that stores the AppSKeys for all the Custodian devices it is authorised to communicate with. When a message is received, the C-Mesh retrieves the corresponding AppSKey based on the DevAddr of the sending device. Using the obtained AppSKey, the message is decrypted, following the LoRaWAN security specifications [6]. The decryption algorithm used is AES-128 in Counter Mode (CTR). The verification of the AppSKey and successful decryption of the message ensures that the data received are genuine and have not been tampered with during transmission.
In addition to device identification and message decryption, the C-Mesh device implements mechanisms to detect and handle duplicate messages, which can arise due to various factors such as retransmissions, network congestion, or malicious attempts to flood the system. Duplicate transmission detection employs a monotonic Frame Counter (FCnt) validation algorithm that implements strict sequential validation against previously recorded counter values, discarding any transmissions with FCnt values less than or equal to the highest previously processed value for each unique DevAddr. This approach ensures that only fresh and unique messages are processed and forwarded to the Custodian platform.
The message processing and filtering tasks performed by the C-Mesh have an impact on its overall performance and power consumption since the device must allocate computational resources and memory to handle the identification, decryption, and deduplication processes for each received message. A C-Mesh device is directly connected to the vessel’s power supply, so the power consumption is not as relevant as with the C-Beacon devices, which are battery-operated. Additionally, since the C-Mesh acts as a LoRaWAN gateway, it must always be available to receive messages from C-Beacons. However, our future work includes plans to establish a schedule between devices to further optimise the times when the C-Mesh should be receiving data, similar to Class B devices, but without the burden of network synchronisations and purely relying on time syncing available through the GNSS present on all devices. The proposed GNSS-based temporal synchronisation methodology offers significant advantages over conventional network synchronisation protocols by eliminating dependency on bidirectional communication for timestamp negotiation, thereby reducing power consumption associated with synchronisation message exchange.
4.1. Security, Challenges, and Limitations
The security architecture addresses multiple threat vectors specific to maritime IoT deployments:
- Passive eavesdropping: Mitigated through AES-128 payload encryption;
- Message forgery and replay attacks: Countered through MIC verification and monotonic frame counter validation;
- Physical device compromise: Partially mitigated through hardware-enforced secure storage;
- Multi-gateway message interception: Architectural consideration through the distributed trust model enabling selective message decryption.
However, notable vulnerabilities persist in the current implementation, particularly regarding potential jamming attacks exploiting the limited frequency bands of LoRaWAN, and denial-of-service vectors through the transmission of invalid messages that still require MIC verification computational resources.
The encryption and decryption processes in the C-Mesh device are fully compliant with the LoRaWAN security specifications. The device utilises industry-standard encryption algorithms, such as AES-128 in CTR mode, to secure the payload of each message. The encryption keys, and specifically the Application Session Key (AppSKey), are generated using cryptographically secure random number generation for each Custodian device and maintained within hardware-protected storage elements of the C-Mesh architecture.
By adhering to the LoRaWAN security framework, the C-Mesh device ensures that the data remains protected throughout its journey from the C-Beacons to the onshore Custodian platform. End-to-end encryption provides a strong defence against eavesdropping, tampering, and other forms of unauthorised access, maintaining the confidentiality and integrity of the transmitted information.
The LoRaWAN protocol employs two distinct security keys for each device: the AppSKey and the NwkSKey. While the AppSKey is used for encrypting and decrypting the payload of the messages, the NwkSKey is used for calculating and verifying the MIC.
The NwkSKey is a 128-bit key that is unique to each device and is derived from the device’s root keys (AppKey and NwkKey) during the join procedure. The NwkSKey is shared between the device and the LoRaWAN network server, which, in this case, is the C-Mesh device acting as a gateway.
The Message Integrity Check (MIC) is a security feature in LoRaWAN that ensures the integrity and authenticity of the messages. The MIC is a 4-byte code that is appended to each LoRaWAN message and is calculated using the NwkSKey and the message payload.
When a C-Beacon transmits a message, it calculates the MIC using its own NwkSKey and includes it in the message. Upon receiving the message, the C-Mesh device extracts the MIC from the message and independently calculates the MIC using the NwkSKey associated with the sending device. The C-Mesh device then compares the received MIC with the calculated MIC to verify the integrity of the message.
If the received MIC matches the calculated MIC, it indicates that the message has not been tampered with during transmission, and the C-Mesh device can proceed with further processing and forwarding of the message to the Custodian platform. However, if the MIC verification fails, the C-Mesh device discards the message, as it suggests that the message has been modified or corrupted, potentially by an unauthorised entity.
To perform MIC validation, the C-Mesh device must securely store and manage the NwkSKeys for all the authorised Custodian devices. Like AppSKeys, NwkSKeys are generated during the device provisioning process and securely distributed to the C-Mesh device through the C-Point.
For a C-Mesh to be able to relay messages to the onshore platform or for local delivery, it has to store the NwkSkey of all the devices. This introduces a possible vulnerability since one C-Mesh owner can have physical access to the keys of the devices of other owners currently using the C-Mesh as a relay. However, since C-Mesh only requires the NwkSKey in order to validate the message and not the AppSKey, the architecture presents minimal risk exposure regarding unauthorised payload decryption. Even so, Custodian users (the vessel owners) can choose if they wish to use other available C-Mesh devices from other vessels (not owned by them) as relays or not, and can also choose whether their C-Mesh is available to others to use. This user-controlled configuration ensures that only authorised devices can participate in the relay network, enhancing the overall security of the system.
A critical operational constraint emerges in maintaining cryptographic synchronicity between distributed maritime nodes (C-Beacons) and relay infrastructure (C-Mesh) with respect to network session keys. If the NwkSKeys become out of sync due to factors such as device de-synchronisation or key rotation issues, it can lead to MIC verification failures and the rejection of legitimate messages. To address this, the Custodian platform implements mechanisms for key synchronisation and recovery, ensuring that the devices and the C-Mesh device always have the correct and up-to-date NwkSKeys.
4.2. Key Management and Distribution
The C-Mesh device is responsible for the management and distribution of encryption keys. The AppSKey, which is used for encrypting and decrypting the payload of LoRaWAN messages and NwkSKeys that validate the LoRaWAN messages, must be securely generated, stored, and shared between the C-Mesh device and the authorised Custodian devices.
To address this challenge, a robust key management system is employed. The keys are generated using secure cryptographic algorithms and are uniquely associated with each Custodian device. Keys are then securely distributed to the C-Mesh device through the C-Point, leveraging the established trust relationship between these components.
The key distribution protocol implements a multi-phase secure transfer mechanism: (i) secure key generation at the centralised Custodian authentication server; (ii) encrypted transmission to the mobile application via TLS-protected channels; (iii) authenticated transfer to the C-Point utilising application-layer encryption; and (iv) final secure propagation to the C-Mesh via hardware-protected UART channels. This hierarchical distribution architecture maintains cryptographic integrity throughout the propagation pathway.
The system implements a comprehensive key lifecycle management protocol with defined temporal boundaries and administrative triggers. Cryptographic material undergoes scheduled rotation at configurable intervals and immediate regeneration upon detection of potential compromise events or device decommissioning. This temporal limitation of cryptographic material conforms to established security practices for low-bandwidth IoT deployments in distributed maritime environments.
To maintain cryptographic synchronisation during network disruption events, the system implements a store-and-forward architecture with integrated cryptographic state preservation. Message authentication and decryption operations continue during connectivity interruptions through locally cached cryptographic material, with state reconciliation procedures executing upon reconnection to ensure cryptographic coherence across the distributed system.
5. Field Tests and Performance Evaluation
This section presents the methodology and results of field tests conducted to evaluate the system’s performance. These tests aim to assess the device’s communication range and quality, buoy location tracking ability, and data processing capabilities under real-world conditions. Test locations included coastal waters and open sea areas in the Atlantic Ocean, off the coast of Portugal, as seen in Figure 8. It is noteworthy that concurrent with these field tests, the maximum documented LoRaWAN transmission distance was reached, i.e., 1336 km, as reported in [31].
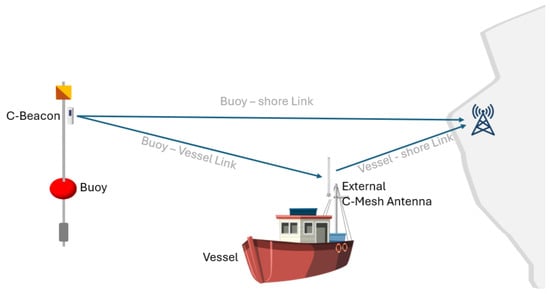
Figure 8.
Field tests communication setup.
The experimental validation employed a field-based deployment methodology utilising a commercial fishing vessel (24 m × 6 m displacement hull) operating from Sesimbra, Portugal (38.437° N, 9.111° W). The vessel conducted normal fishing operations extending to approximately 80 km offshore, providing an authentic maritime environment during the experimental period. The C-Mesh device was installed at an elevation of 15 m above sea level, secured to one of the vessel’s masts with mostly unobstructed 360° horizontal radiation pattern, facilitating comprehensive spatial coverage assessment. By utilising the fishermen’s buoys, we were also able to test the implementation of C-Beacon in conjunction with C-Mesh, as presented in Figure 9.
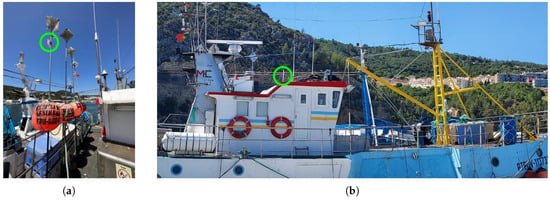
Figure 9.
Test-bed installation: (a) C-Beacon installation on the buoys; (b) antenna placement.
To accurately evaluate the C-Mesh device’s performance, it was crucial to determine both the vessel’s location (where the C-Mesh was installed) and the buoy’s location (where the C-Beacon was deployed). The C-Beacon was designed to transmit its location via LoRaWAN to any receiver capable of decoding the message. To facilitate immediate decoding of these messages and retrieval of GPS locations, we loaded the AppSKey and NwkSKey into the C-Mesh device. This setup allowed us to obtain both the C-Mesh and C-Beacon locations in real time.
For this test, the vessel followed its standard working route, departing from the Sesimbra port and travelling to a location in the Atlantic Ocean approximately 35 nautical miles (65 km) from Cabo da Roca, where it deployed several buoys. A C-Mesh on the vessel sent a LoRaWAN message every 5, containing with its current location and other status information. A copy of the sent message was also stored locally for offline processing. During the first travel, no buoy with a C-Beacon was already deployed at sea. The buoy to be tested was on board the vessel with a deactivated C-Beacon. As soon as the fishermen arrived at their final destination, the C-Beacon was activated and the buoy was dropped at sea. After that, the fishermen remained in the area to perform some fishing activities before returning to port. This C-Beacon remained active for two more trips, as can be seen in Figure 10. The test was performed with favourable weather conditions. After buoy deployment, the C-Beacon produced a LoRaWAN message every 5 min, containing its location and other status information. Every C-Beacon message received by the C-Mesh was also stored in the C-Mesh for further processing. Given that C-Beacon generates messages at a fixed, predetermined rate, based on the time difference between messages received, it is possible to detect lost messages.
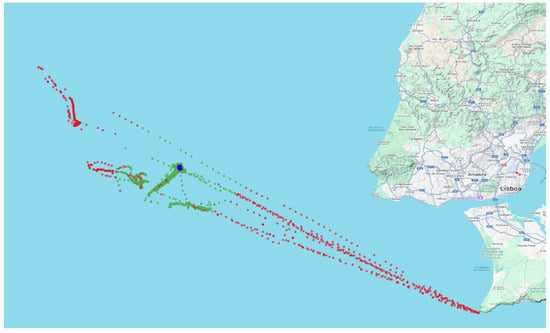
Figure 10.
Vessel route (red and green dots) and buoy location (blue dots). (Green: vessel locations where messages with C-Beacon/Buoy location were received by C-Mesh; red: vessel locations where C-Beacon location messages were not received by C-Mesh; blue: effective C-Beacon locations.)
In Figure 10, the red and green dots correspond to a vessel location, obtained every 5 min. The green dots correspond to C-Beacon messages received by the C-Mesh, while the red dots correspond to locations where no messages from the C-Beacon were received. Blue dots indicate the C-Beacon location for every (green) message received. While at sea, the largest distance between vessel and buoy reached a maximum of 13 km. These empirical measurements demonstrate that a vessel–mounted LoRaWAN gateway effectively extends the coverage area by a minimum of a 13 km radius around the vessel, as detailed in Figure 11.
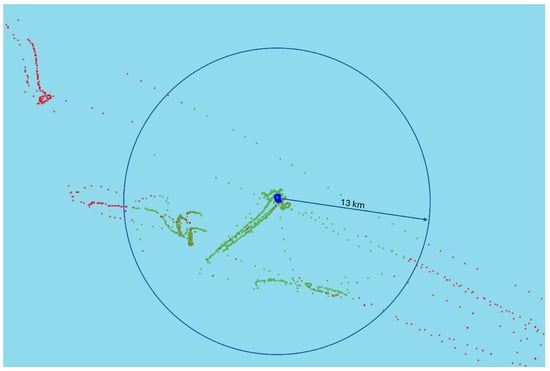
Figure 11.
Detail of the messages received around the buoy. (Green: vessel locations where messages with C-Beacon/Buoy location were received by C-Mesh; red: vessel locations where C-Beacon location messages were not received by C-Mesh; blue: effective C-Beacon locations.)
Although communication between C-Mesh and C-Beacon could be established up to 13 km, there were some messages lost. The reception success rate (percentage of received messages relative to expected transmissions) as a function of distance, analysed in 1 km increments, is presented in Figure 12. For example, the probability associated with 2 km is around . This indicates that within the range of 2 km ± 500 m between C-Beacon and C-Mesh, of expected transmissions failed to reach the receiver. The data confirm the anticipated inverse relationship between reception probability and distance. Multiple confounding variables also influence transmission success; i.e., the relative position of the antenna on the ship and the antenna on the buoy as the ship moves around, as well as the sea conditions, especially the height of the waves, can have an impact on the probability of reception. Due to the less controllable nature of the present test, it is not possible to separate these factors and evaluate their impact individually.
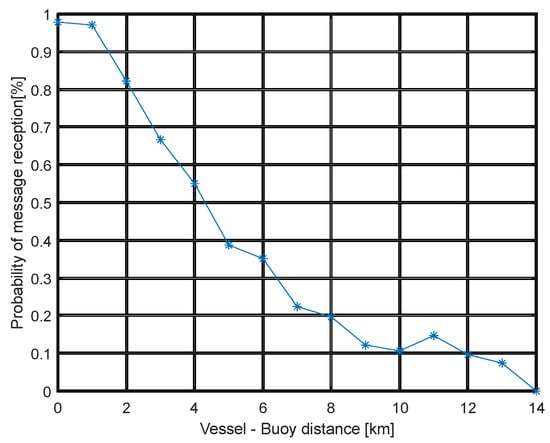
Figure 12.
Probability of successful message reception on the vessel.
The obtained Received Signal Strength Indicator (RSSI) and Signal-to-Noise Ratio (SNR) values for the received messages can be seen in in Figure 13. Figure 13 reveals three distinct areas of data density, namely, two areas of larger density (one for distances smaller than 1.5 km and the other around 10 km) and a less dense area in between. This behaviour is explained by the larger number of messages received while the vessel was either stationary or moving slowly. It is worth noting that these data were collected during normal fishing activities, and the vessel position was not regularly distributed. As can be seen in Figure 11, there are four areas where the vessel spent more time (areas with a higher concentration of green dots). Two of these areas are roughly 10 km away from the C-Beacon, a third one is concentrated around the blue circle (when the buoying was being deployed), and there is a fourth area with more evenly distributed distances (roughly between 0 km and 10 km) when the boat is moving slowly and almost in a straight line from the buoy in a southwest direction. The areas with a lower concentration of green dots in Figure 12 correspond to periods where the vessel was performing reposition manoeuvrers and/or moving at higher speeds.
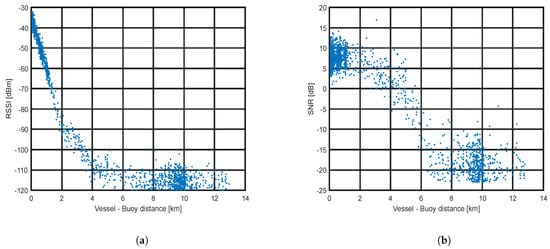
Figure 13.
Characteristics of received messages for different distances: (a) RSSI; (b) SNR.
In Figure 13, a sharp decrease in RSSI and SNR as a function of distance is evident. Additionally, signal variance demonstrates a positive correlation with distance, exhibiting statistically significant heteroscedasticity. This same effect can be observed in Figure 14, which presents the Probability Density Function (PDF) for the interval between 0 and 2 km and then between 8 and 10 km, where a substantial increase in standard deviation can be verified.
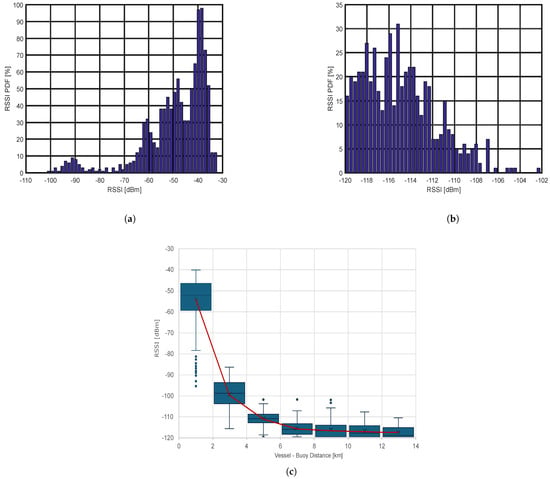
Figure 14.
RSSI analysis: (a) PDF for 0–2 km distance interval; (b) PDF for 8–10 km distance interval; and (c) box diagram of RSSI.
In Figure 14c, the box plot for the RSSI values is presented, showing the previously mentioned behaviour, and it is possible to observe the median of the signal.
These experimental findings emphasise the critical importance of antenna placement optimisation in maritime IoT deployments. The vessel’s mast, typically populated with multiple radiating elements ranging from Marine VHF to satellite communications equipment, creates a complex electromagnetic environment. Strategic positioning of the LoRaWAN antenna receiver for the C-Mesh requires isolation from metallic structures and other radiating elements to minimise interference. This consideration becomes particularly significant given the relatively low signal strength characteristics of LoRaWAN transmissions in maritime environments. Optimal antenna placement demonstrably enhances network performance and reliability, ensuring consistent communication integrity between vessel-mounted equipment and floating sensor platforms.
6. Conclusions and Future Work
The C-Mesh device, developed as part of the Custodian platform, addresses specific connectivity challenges, including signal propagation limitations and network coverage discontinuities in maritime IoT connectivity in fishing vessel monitoring systems. By enabling local data delivery and demonstrably extending LoRaWAN coverage, the C-Mesh device ensures that fishing vessels remain connected to the surrounding LoRa devices and to an appropriately configured onshore network infrastructure and have access to information about the location of their buoys, even when operating in relatively remote areas.
The selective cryptographic processing architecture enabling localised data delivery represents a significant advancement in maritime IoT information accessibility, facilitating immediate operational awareness through the direct transmission of positioning coordinates to vessel operators independent of terrestrial network infrastructure availability. This local data delivery feature ensures that fishing vessel operators have access to positional data, status indicators, and operational parameters, even when outside the coverage of the Custodian network. Furthermore, by relaying encrypted messages from other vessels’ buoys back to the shore, the C-Mesh device contributes to the overall improvement of the monitoring system’s coverage, benefiting the entire fishing community. The field tests conducted on a fishing vessel from the Sesimbra port in Portugal validate the effectiveness of the C-Mesh device. The results demonstrate an empirically validated 13 km coverage range, which is attributed to the strategic installation of the device on the vessel’s mast, using the elevated position for improved signal reception and transmission.
The message processing algorithms employed by the C-Mesh device, including encryption, decryption, and duplicate message filtering, ensure secure and efficient communication. These features demonstrate the device’s robustness and reliability in handling the bandwidth-constrained, high-latency transmission environments typical of maritime IoT application deployments.
The development of the C-Mesh device represents a significant technical contribution to maritime wireless sensor network architectures for the fishing industry. Its ability to extend LoRaWAN coverage and provide local data delivery provides vessel operators with quantifiable operational benefits, promotes sustainable fishing practices, and helps comply with regulations.
While our current implementation demonstrates the effectiveness of a single C-Mesh device in extending LoRaWAN coverage and providing local data delivery, important scalability considerations warrant further investigation. Future work will focus on comprehensive testing with multiple C-Mesh devices operating simultaneously to empirically measure network performance under various density conditions. Another vector of future study is the use of several C-Mesh devices installed on multiple vessels within a fishing area, working cooperatively to achieve a multi-hop connection.
Author Contributions
Conceptualization, C.M., N.C. (Nuno Cruz) and N.C. (Nuno Cota); methodology, C.M. and N.C. (Nuno Cruz); software, G.E. and R.T.; validation, N.C. (Nuno Cota), N.C. (Nuno Cruz) and C.M.; formal analysis, J.P.; investigation, J.C. and J.P.; resources, C.M. and N.C. (Nuno Cota); writing—original draft preparation, N.C. (Nuno Cruz), C.M. and N.C. (Nuno Cota); writing—review and editing, L.L.; supervision, C.M.; project administration, C.M.; funding acquisition, N.C. (Nuno Cota). All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the EEA Grants Blue Growth Programme, which aims to promote sustainable and innovative solutions in the blue economy sector, grant number PT-INNOVATION-0100, and by Fundação para a Ciência e a Tecnologia, through LASIGE Research Unit, ref. UID/00408/2025.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
Some of the authors are affiliated with Solvit, which has commercial interests in the Custodian project and intends to develop commercial products based on the outcomes presented in this research. The funding sponsors had no role in the design of the study or in the collection, analyses, or interpretation of data; however, representatives from Solvit contributed to the writing of the manuscript, as acknowledged in the author contributions section. The decision to publish the results was made collectively by all authors with no undue influence from commercial interests.
Note
| 1 | See https://custodian.solvit.pt (accessed on 8 May 2025). |
References
- European Commission. The EU Fisheries Control System Gets a Major Revamp. 2024. Available online: https://oceans-and-fisheries.ec.europa.eu/news/eu-fisheries-control-system-gets-major-revamp-2024-01-09_en (accessed on 8 May 2025).
- Brown, J.; Macfadyen, G. Ghost fishing in European waters: Impacts and management responses. Mar. Policy 2007, 31, 488–504. [Google Scholar] [CrossRef]
- Ryan, P.J.; Watson, R.B. Research Challenges for the Internet of Things: What Role Can OR Play? Systems 2017, 5, 24. [Google Scholar] [CrossRef]
- The Things Network. Available online: https://www.thethingsnetwork.org/ (accessed on 8 May 2025).
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- A.Bertolaud. TS001-1.0.4 LoRaWAN L2 1.0.4 Specification. 2023. Available online: https://resources.lora-alliance.org/technical-specifications/ts001-1-0-4-lorawan-l2-1-0-4-specification (accessed on 20 June 2024).
- Xia, T.; Wang, M.M.; Zhang, J.; Wang, L. Maritime Internet of Things: Challenges and Solutions. IEEE Wirel. Commun. 2020, 27, 188–196. [Google Scholar] [CrossRef]
- Aboul-Dahab, K. The Role of Vessel Monitoring Systems (VMS) in Mitigating Illegal, Unreported and Unregulated (IUU) Fishing. 2022. Available online: https://ssrn.com/abstract=4081953 (accessed on 8 May 2025).
- Alqurashi, F.S.; Trichili, A.; Saeed, N.; Ooi, B.S.; Alouini, M.S. Maritime Communications: A Survey on Enabling Technologies, Opportunities, and Challenges. IEEE Internet Things J. 2023, 10, 3525–3547. [Google Scholar] [CrossRef]
- Tilley, A.; Roscher, M. (Eds.) Information and Communication Technologies for Small-Scale Fisheries (ICT4SSF)—A Handbook for Fisheries Stakeholders: In Support of the Implementation of the Voluntary Guidelines for Securing Sustainable Small-Scale Fisheries in the Context of Food Security and Poverty Eradication; Food and Agriculture Organization: Bangkok, Thailand, 2020. [Google Scholar]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A Survey of LoRaWAN for IoT: From Technology to Application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [PubMed]
- Pinelo, J.; Rocha, A.D.; Arvana, M.; Gonçalves, J.; Cota, N.; Silva, P. Unveiling LoRa’s Oceanic Reach: Assessing the Coverage of the Azores LoRaWAN Network from an Island. Sensors 2023, 23, 7394. [Google Scholar] [CrossRef] [PubMed]
- Lumet, E.; Le Floch, A.; Kacimi, R.; Lihoreau, M.; Beylot, A.L. LoRaWAN Relaying: Push the Cell Boundaries. In Proceedings of the 24th International ACM Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Alicante, Spain, 22–26 November 2021; pp. 217–220. [Google Scholar] [CrossRef]
- Msaad, M.; Waleed, M.; Kosta, S. Enabling LoRaWAN Communication with Out-of-coverage End Nodes in DTN Scenarios Through an Optimised Duty-cycle. In Proceedings of the 2021 14th CMI International Conference—Critical ICT Infrastructures and Platforms (CMI), Copenhagen, Denmark, 25–26 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Parri, L.; Parrino, S.; Peruzzi, G.; Pozzebon, A. A LoRaWAN Network Infrastructure for the Remote Monitoring of Offshore Sea Farms. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Almeida, N.C.; Rolle, R.P.; Godoy, E.P.; Ferrari, P.; Sisinni, E. Proposal of a Hybrid LoRa Mesh/LoRaWAN Network. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020; pp. 702–707. [Google Scholar] [CrossRef]
- Cruz, N.; Cota, N.; Tremoceiro, J. LoRaWAN and Urban Waste Management—A Trial. Sensors 2021, 21, 2142. [Google Scholar] [CrossRef] [PubMed]
- Scapin, G.L.; Alvarez, G.; Quiroga, N.; Collado, F.; Fraire, J.A. Performance Assessment of LoRaWAN DtS-IoT Networks: Operation Modes and Server Placement. In Proceedings of the 2024 IEEE Biennial Congress of Argentina (ARGENCON), San Nicolás de los Arroyos, Argentina, 18–20 September 2024; pp. 1–8. [Google Scholar] [CrossRef]
- Pilar-Fonseca, T.; Campos, A.; Fonseca, P.; Mendes, B.; Henriques, V.; Afonso-Dias, J.P.M. The importance of satellite-based vessel monitoring system (VMS) for fisheries management: A case study in the Portuguese trawl fleet. In Maritime Engineering and Technology; CRC Press: Boca Raton, FL, USA, 2012; pp. 19–25. [Google Scholar]
- Kelleher, K. The Costs of Monitoring, Control and Surveillance of Fisheries in Developing Countries; FAO Fisheries: Roma, Italy, 2002. [Google Scholar]
- Hoenner, X.; Barlian, E.; Ernawati, T.; Hardesty, B.D.; Kembaren, D.D.; Mous, P.J.; Sadiyah, L.; Satria, F.; Wilcox, C. Using anti-theft tracking devices to infer fishing vessel activity at sea. Fish. Res. 2022, 249, 106230. [Google Scholar] [CrossRef]
- Santelices, R.; Barlizo, J.E.; Soledad, F., III; Estoque, K.J.; Santosidad, J.M. Tracking Device System Using LoraWan for Motorized and Non-Motorized Banca in Catanduanes. 2023. Available online: https://ssrn.com/abstract=4735070 (accessed on 8 May 2025).
- Gerritsen, H.; Lordan, C. Integrating vessel monitoring systems (VMS) data with daily catch data from logbooks to explore the spatial distribution of catch and effort at high resolution. ICES J. Mar. Sci. 2011, 68, 245–252. [Google Scholar] [CrossRef]
- Rufino, M.M.; Mendo, T.; Samarão, J.; Gaspar, M.B. Estimating fishing effort in small-scale fisheries using high-resolution spatio-temporal tracking data (an implementation framework illustrated with case studies from Portugal). Ecol. Indic. 2023, 154, 110628. [Google Scholar] [CrossRef]
- Kroodsma, D.A.; Mayorga, J.; Hochberg, T.; Miller, N.A.; Boerder, K.; Ferretti, F.; Wilson, A.; Bergman, B.; White, T.D.; Block, B.A.; et al. Tracking the global footprint of fisheries. Science 2018, 359, 904–908. [Google Scholar] [CrossRef] [PubMed]
- Ullah, M.A.; Mikhaylov, K.; Alves, H. Enabling mMTC in Remote Areas: LoRaWAN and LEO Satellite Integration for Offshore Wind Farm Monitoring. IEEE Trans. Ind. Inform. 2022, 18, 3744–3753. [Google Scholar] [CrossRef]
- Ubina, N.A.; Cheng, S.C. A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones 2022, 6, 12. [Google Scholar] [CrossRef]
- Moheddine, A.; Patrone, F.; Marchese, M. UAV-based LoRaWAN flying gateway for the internet of flying things. Int. J. Commun. Syst. 2023, 36, e5421. [Google Scholar] [CrossRef]
- Barthel, D.; Buffard, C.; Carrion, I.; Catalano, J.; Ferreira, L.; Grochla, K.; Grudsky, M.; Kasttet, A.; Kirwan, M.; Kjendal, D.; et al. TS011-1.0.0 Relay. 2022. Available online: https://resources.lora-alliance.org/technical-specifications/ts011-1-0-0-relay (accessed on 8 May 2025).
- Semtech. SX1302 Datasheet. 2019. Available online: https://www.semtech.com/products/wireless-rf/lora-core/sx1302 (accessed on 21 June 2024).
- Network, T. New LoRa World Record: 1336 km/830 mi. 2024. Available online: https://www.thethingsnetwork.org/article/new-lora-world-record-1336-km-830-mi (accessed on 8 May 2025).
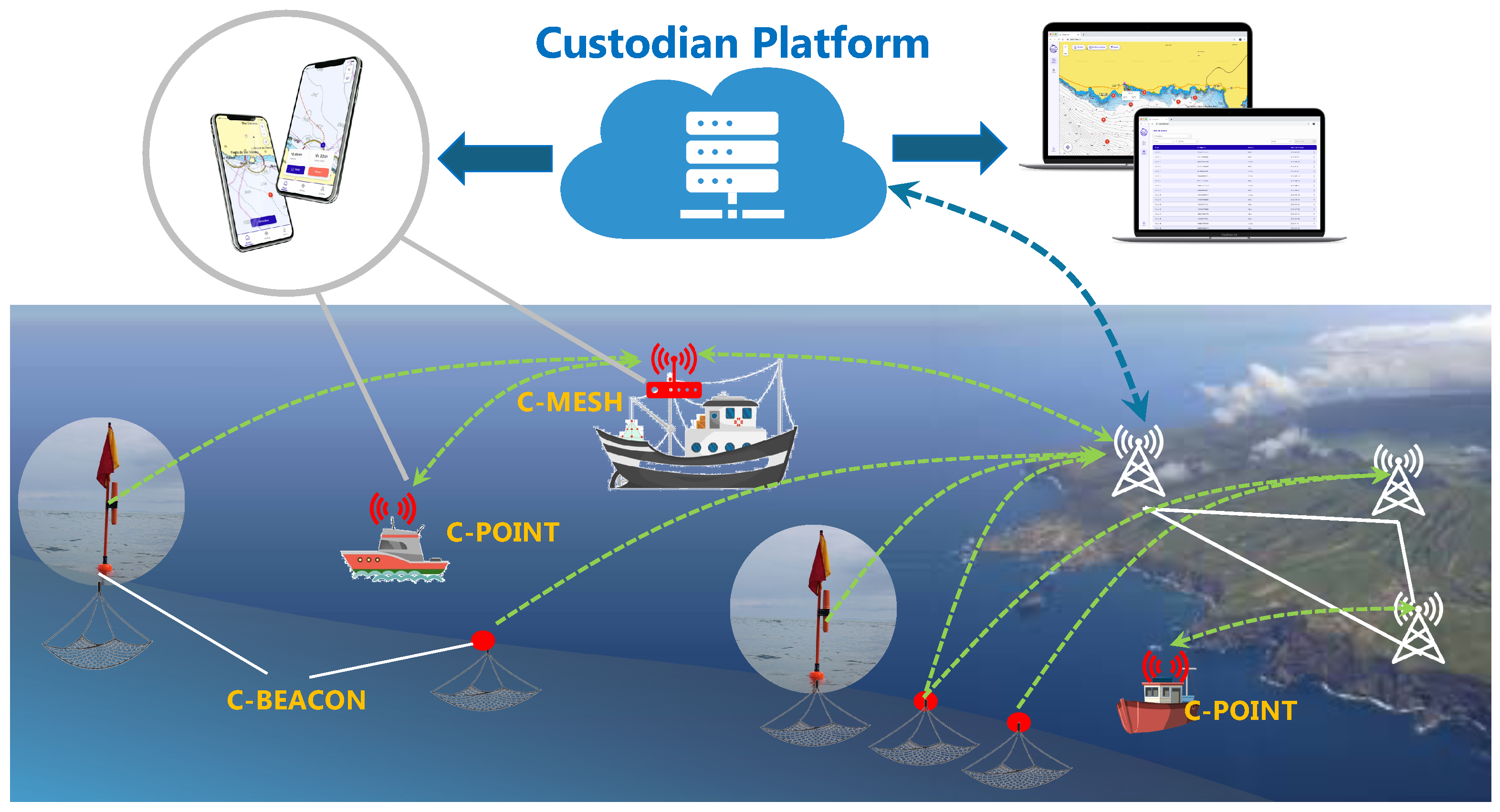
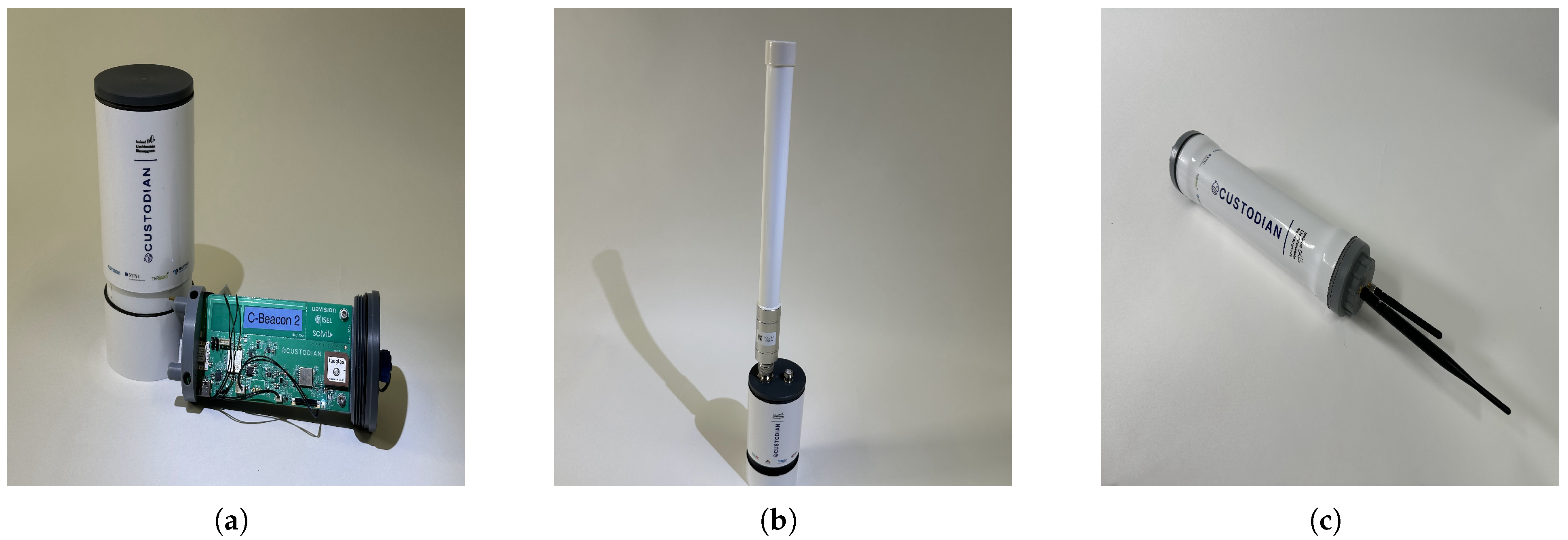
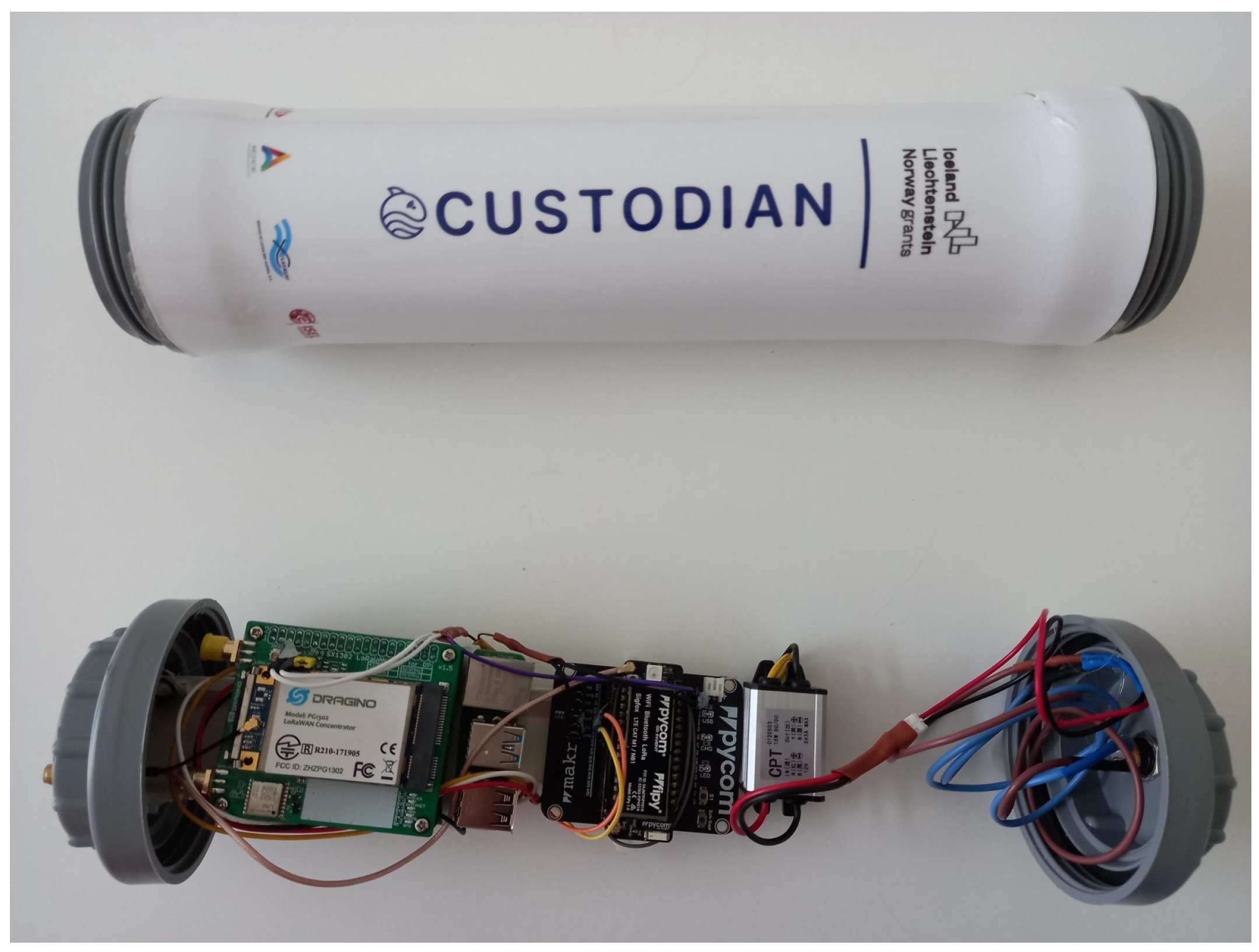
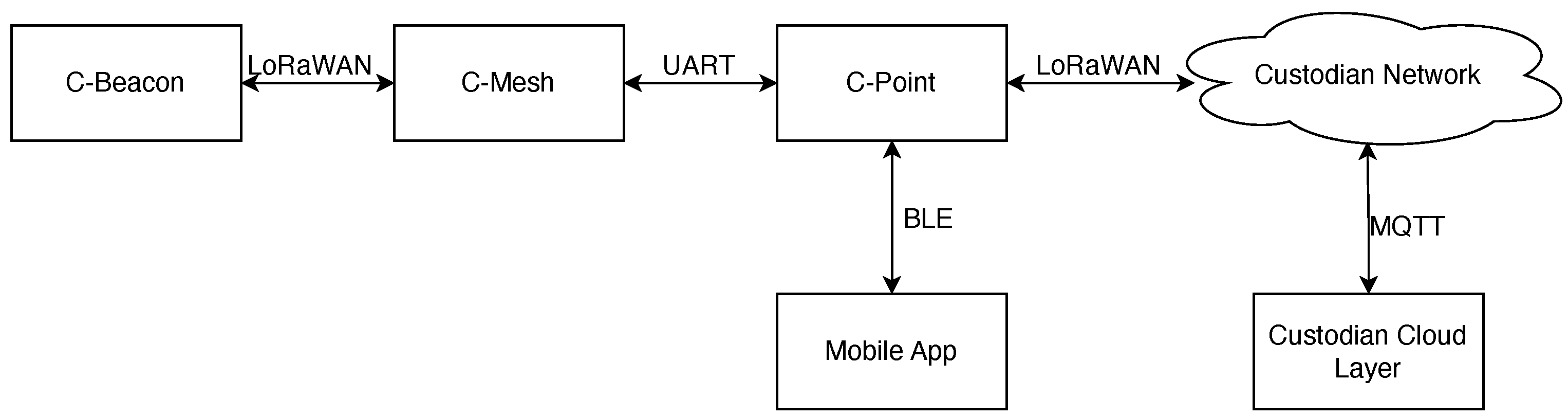
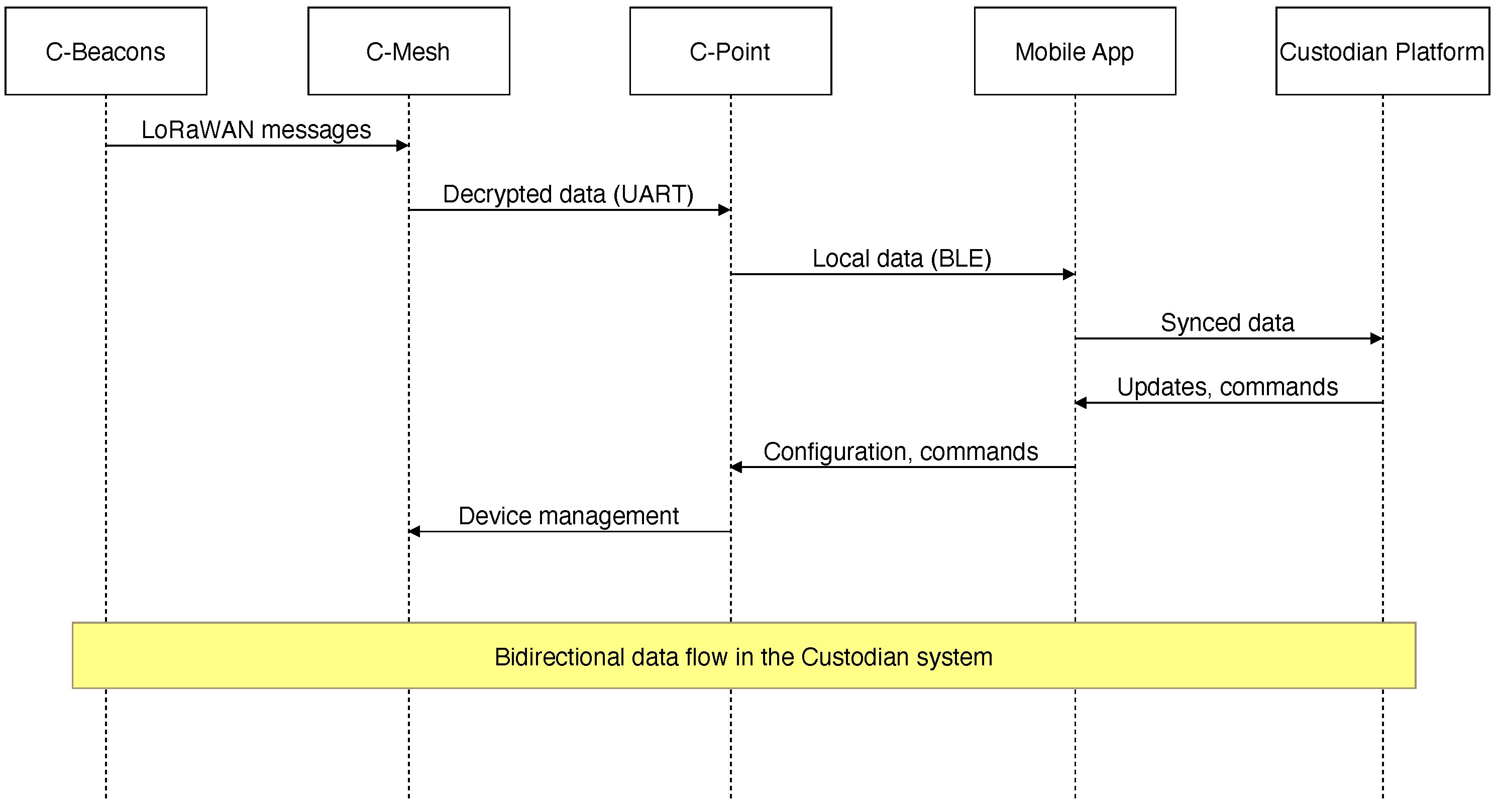
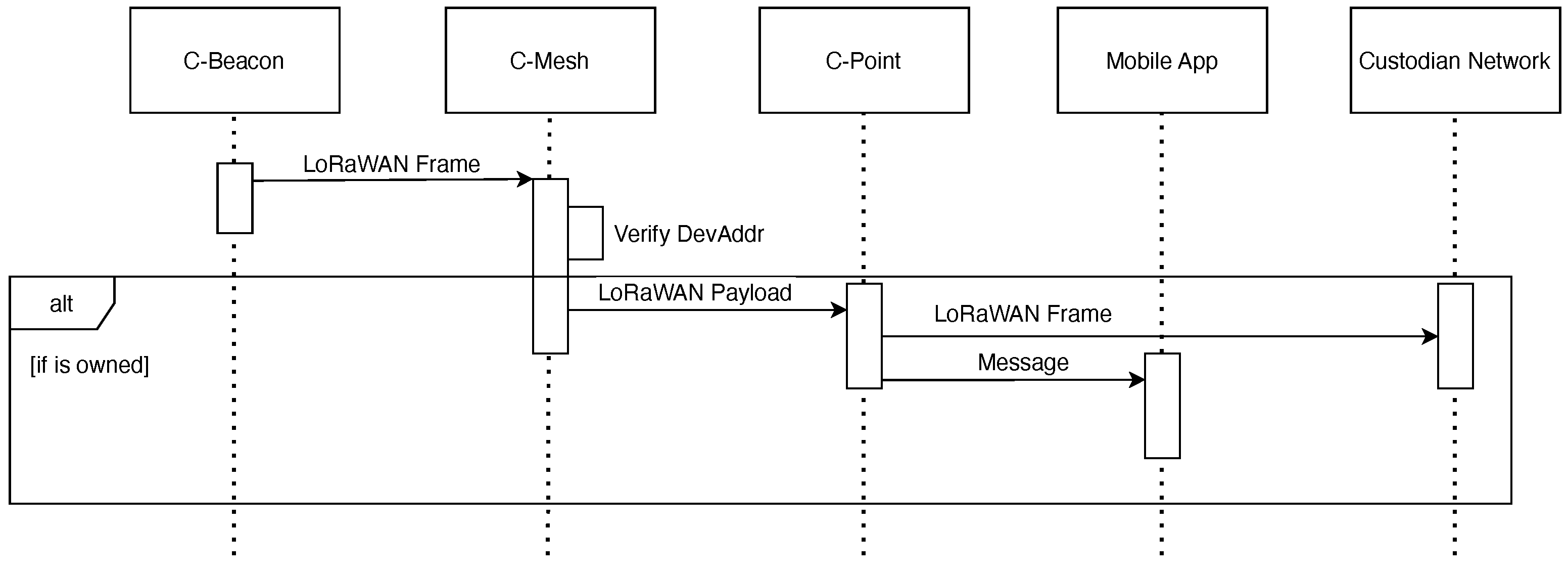
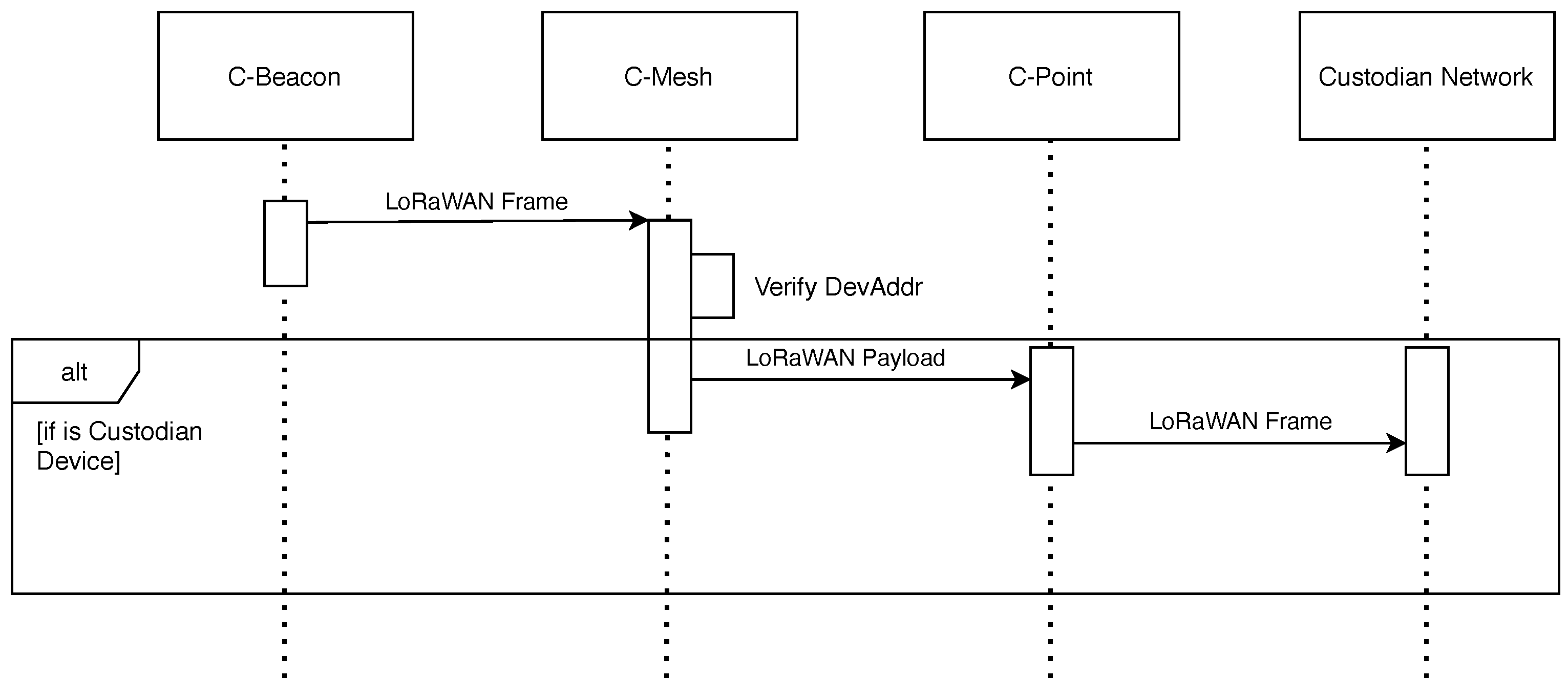
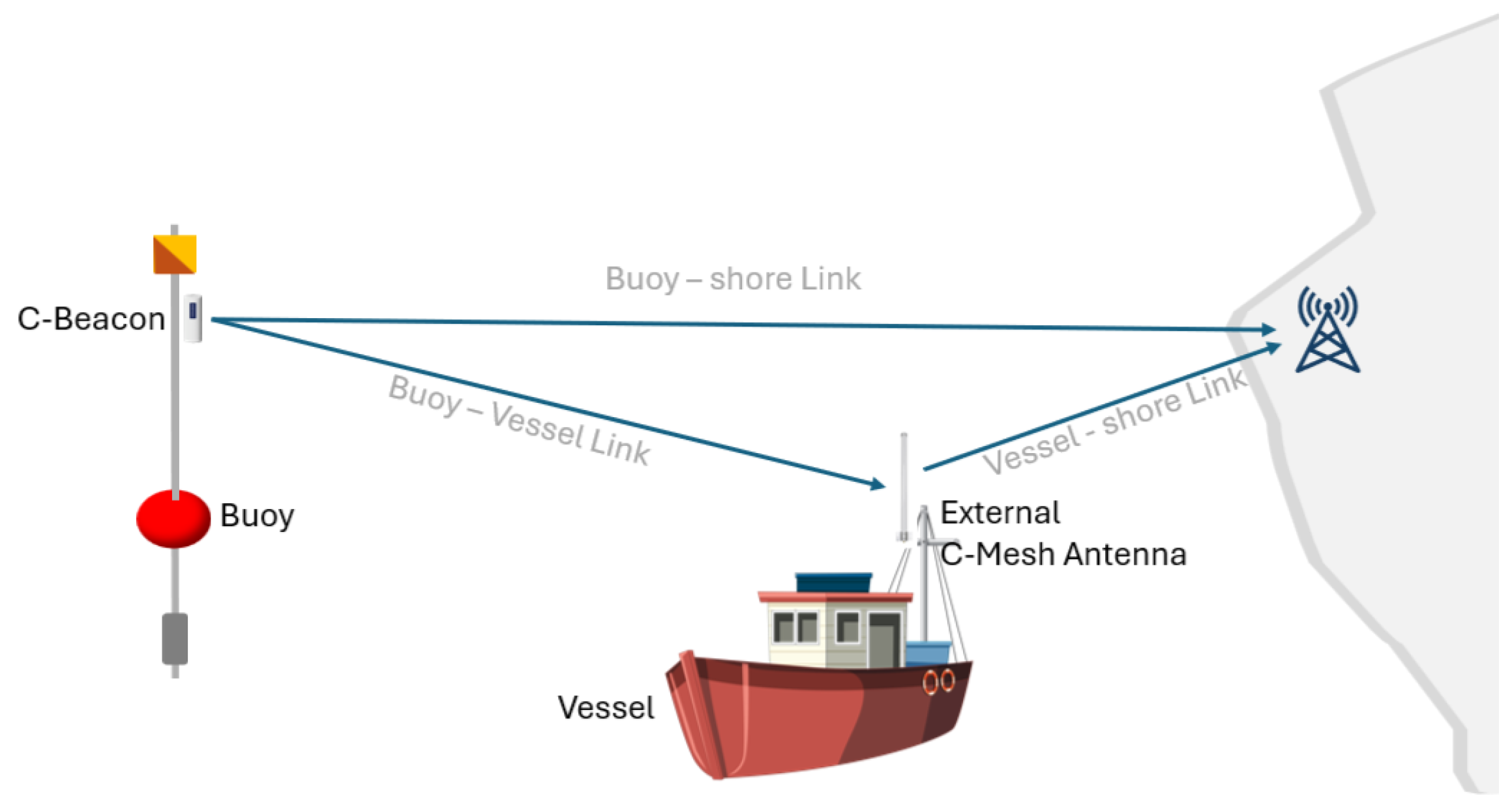
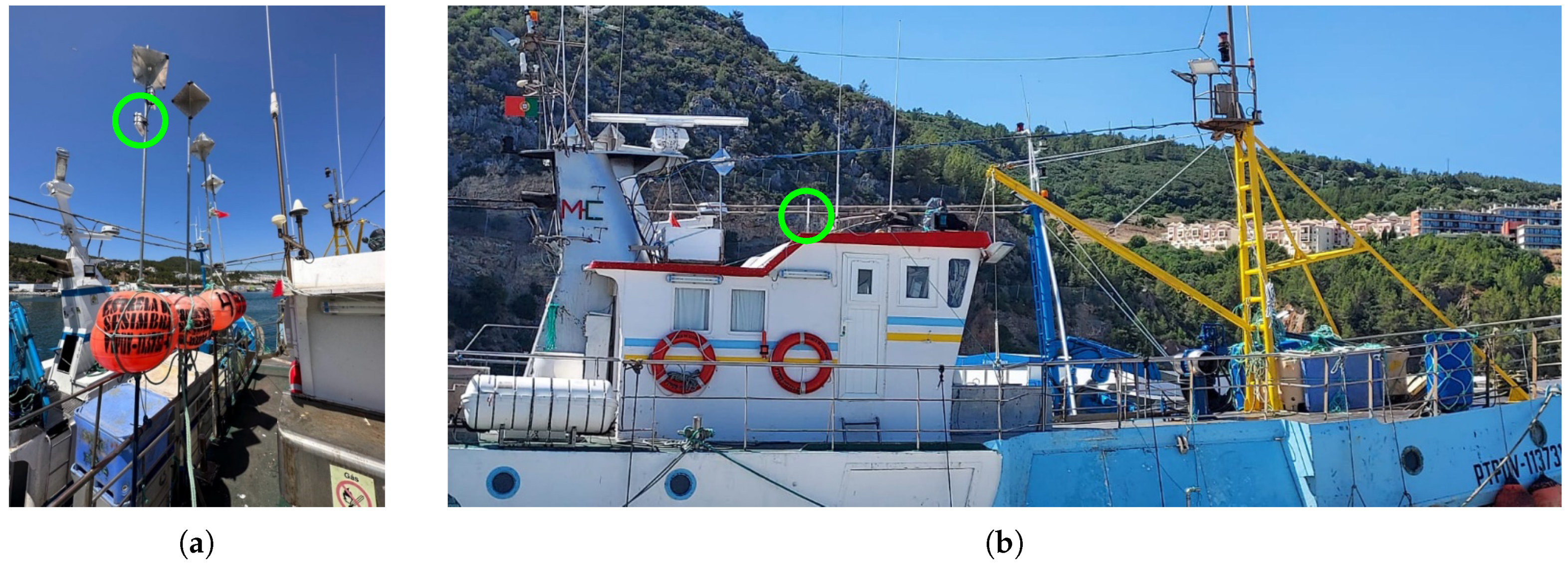
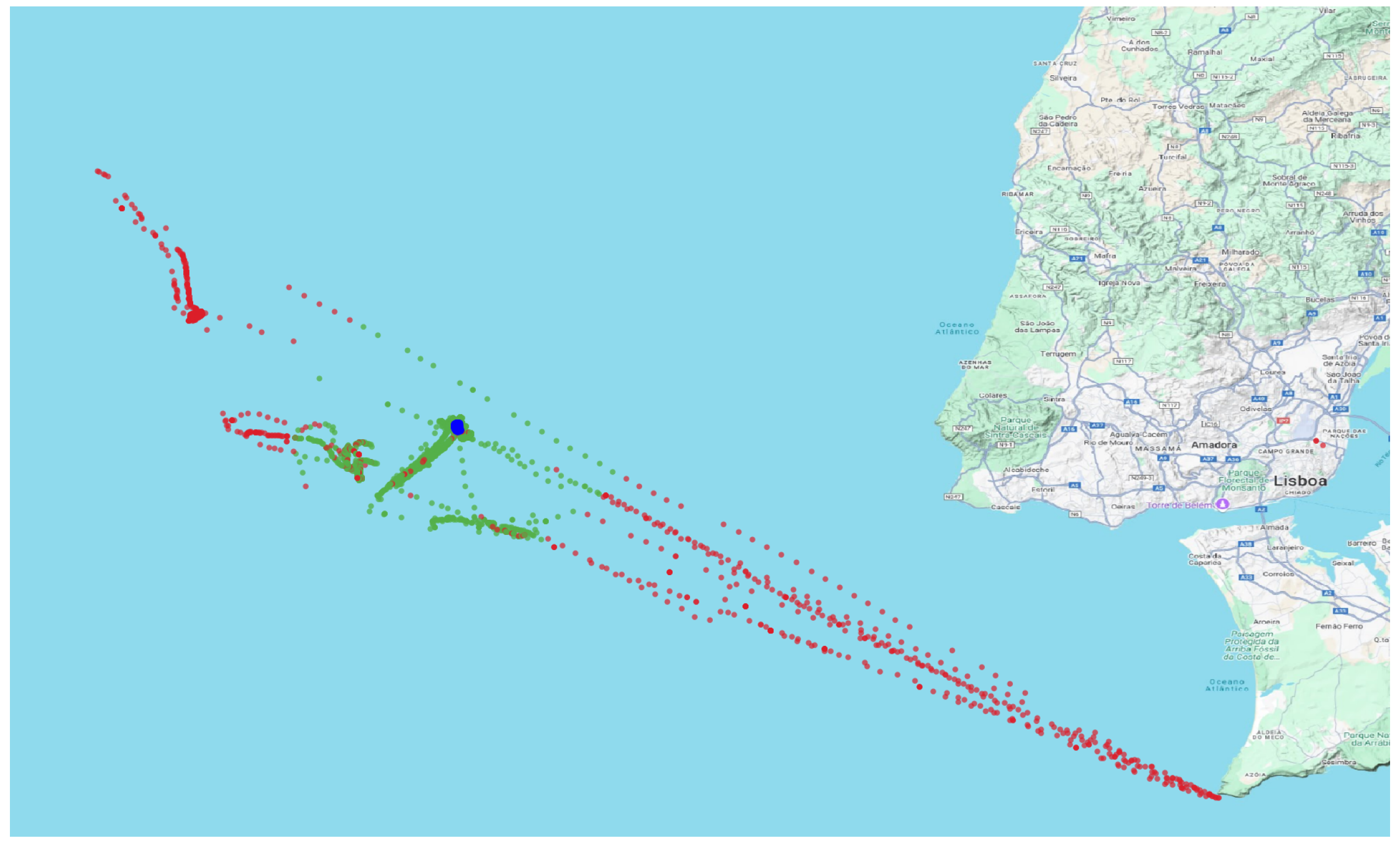
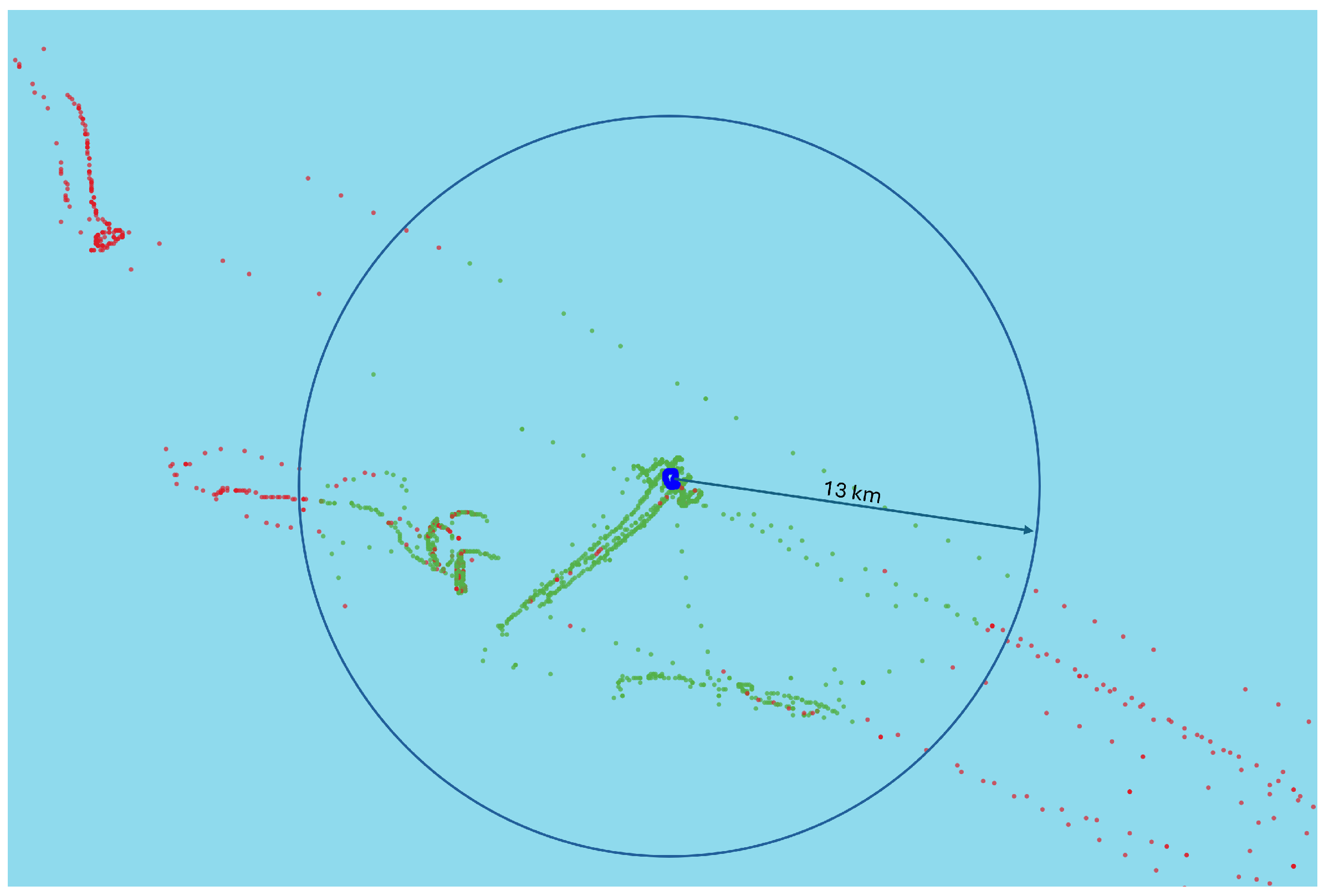
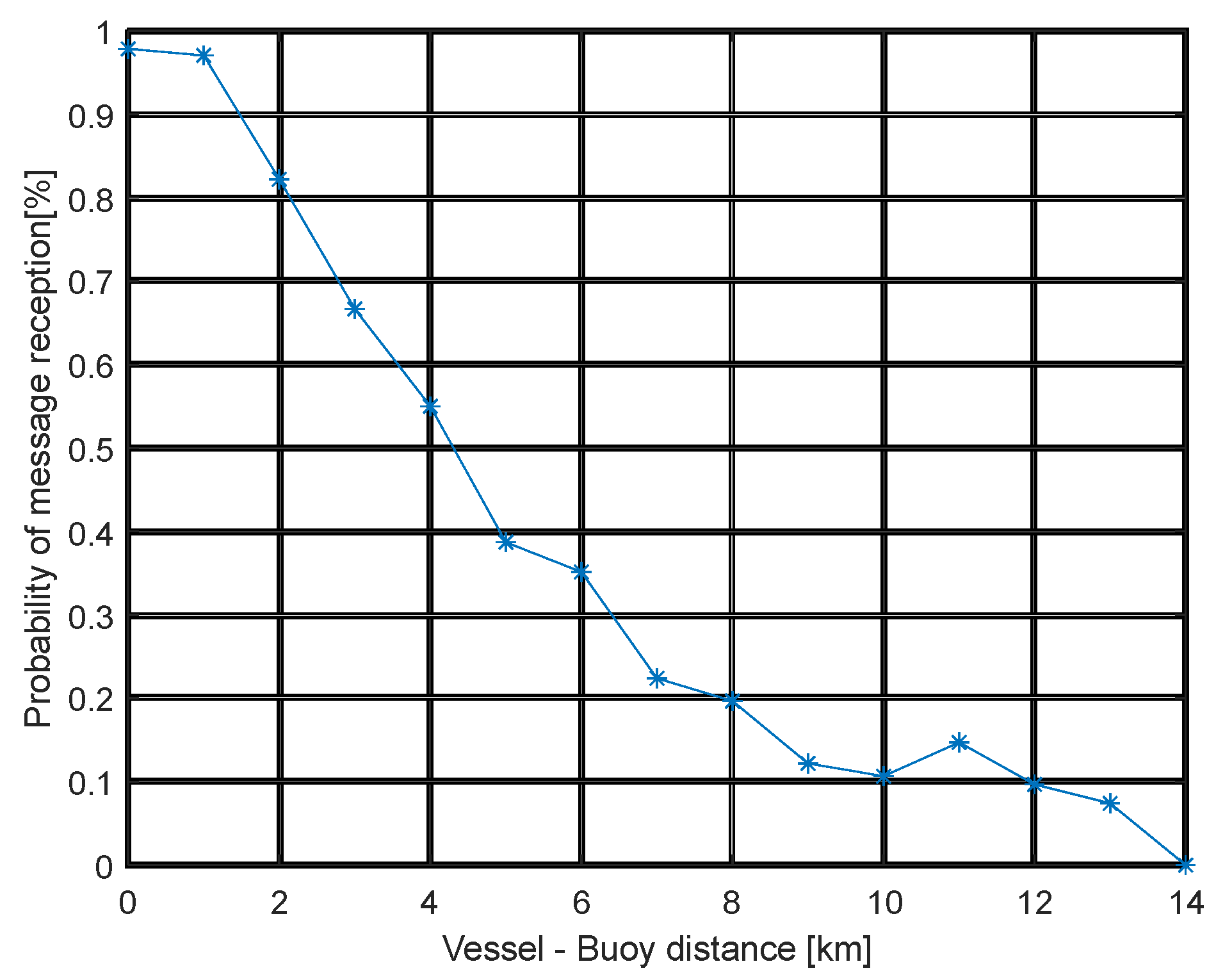
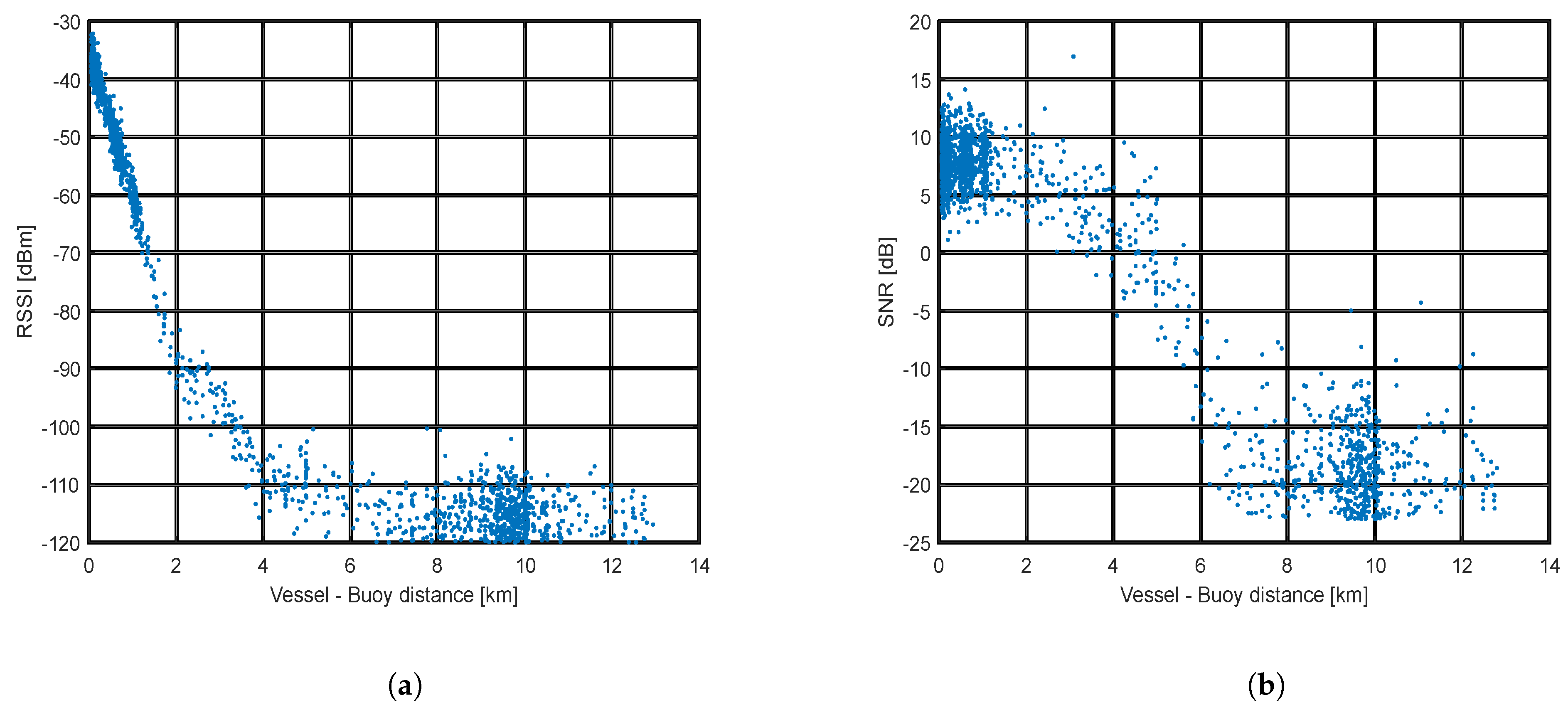
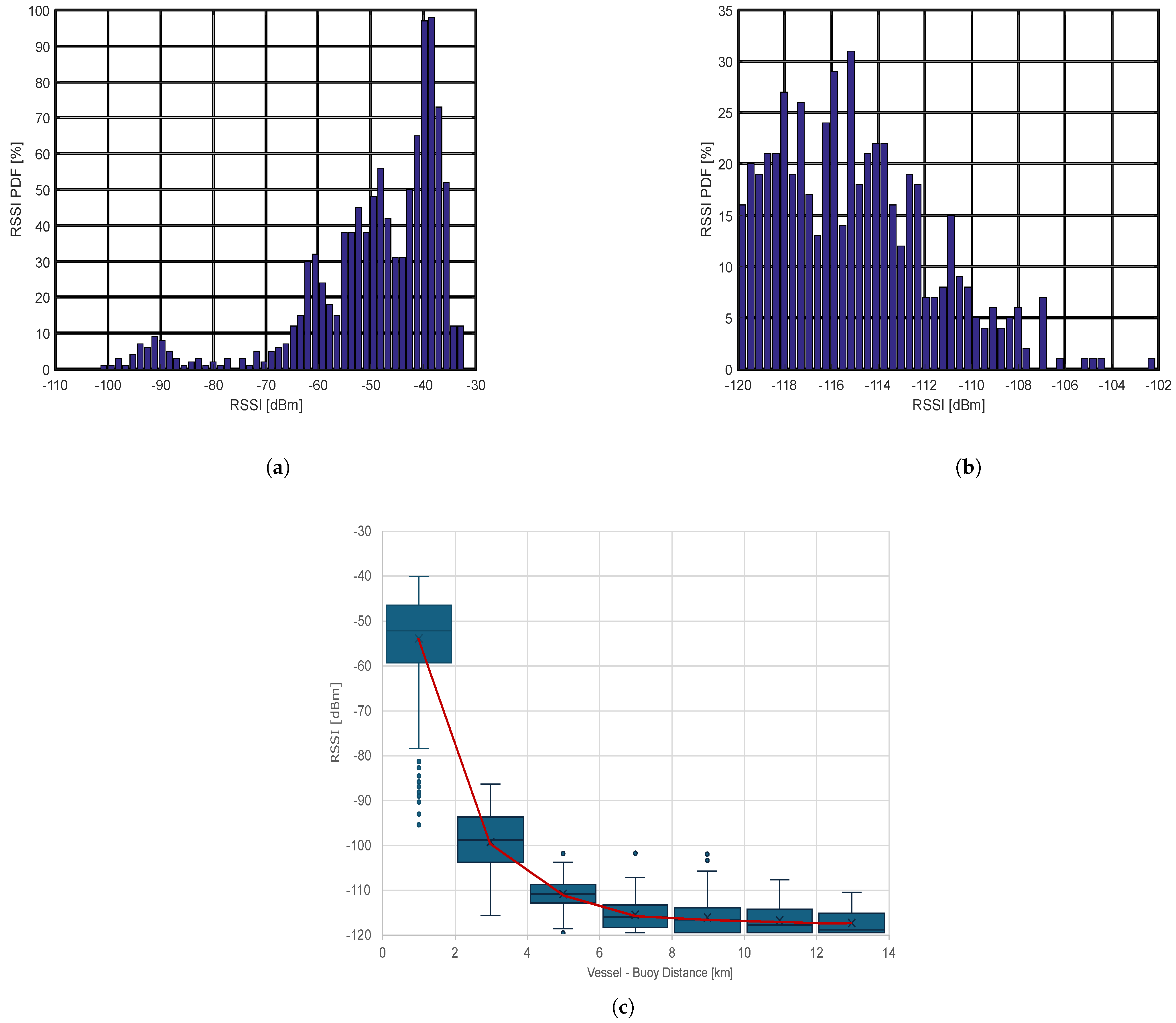
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).