We now move on to the two-lane escalator and consider two possible configurations for the two lanes (both queueing on the platform and traveling on the escalator):
Under the latter two assumptions, both configurations act as two separate independent FCFS queues, whereas if Assumption 4 is relaxed (which is more realistic), the S-S configuration acts almost identically to a two-server single FCFS queue. Clearly, the S-S configuration can exploit pooling and load balancing for better performance, albeit at the cost of non-service to the walkers with no lane, so if there are customers from both classes, additional specifications are needed in our static model to take care of the walkers.
5.1. Clearing the Platform
For the WS configuration, we have the following result by applying Proposition 1 and the definition of makespan:
Proposition 2. For the WS escalator configuration under Assumptions 1–4, the time to clear a completely packed FCFS two-lane queueing platform that starts with customers, where and denote the number of walkers and standers, respectively, is given by (i) for fast-moving queues (both lanes) and (ii) for slow-moving queues (both lanes).
We introduce a concrete toy example to illustrate the calculations and obtain some preliminary insights into the load-balancing considerations. We take
and
and consider five distributions among the 20 total customers (i.e., 0, 5, 10, 15, and 20 for the number of walkers or standers), performing the calculations for both fast-moving and slow-moving queues, with the results summarized in
Table 1. The results highlight the fact that balancing the load between the two queues is key to achieving optimal efficiency. In the real world, one London study has shown that about 75% choose to stand rather than walk [
22], corresponding to the 5 + 15 (second) distribution below.
Example 1. WS configuration with fast-moving customers.
0 + 20: no walkers, last stander 40; makespan 40.
5 + 15: last walker 10, last stander 30; makespan 30.
10 + 10: last walker and last stander 20; makespan 20.
15 + 5: last walker 30, last stander 10; makespan 30.
20 + 0: last walker 40, no standers; makespan 40.
Example 2. WS configuration with slow-moving customers.
0 + 20: no walkers, last stander 59; makespan 59.
5 + 15: last walker 14, last stander 44; makespan 44.
10 + 10: last walker and last stander 29; makespan 29.
15 + 5: last walker 44, last stander 14; makespan 44.
20 + 0: last walker 59, no standers; makespan 59.
Carrying out analogous calculations for the S-S configuration requires some additional assumptions because walkers would theoretically never get served in the queueing model. In practice, the simplest assumption to make is that they can still board the escalator but would just be stymied in the next stage of riding the escalator itself, i.e., step (iii) in
Figure 1. Since the primary focus of this analysis is to minimize time to clear the platform, we will make this assumption, i.e.,
Assumption 5. Walkers will use either queue to board a stand-only (S-S-configured) escalator.
We will further consider perfect load balancing, or, equivalently, allow jockeying between the two queues with pooled servers (lane).
Definition 3. Two queues are said to be
load-balanced
if they have the same number of customers. A multi-server queueing system is said to be
pooled
if customers in any of the queues can be served by any of the servers.
Under this additional condition in conjunction with Assumption 5, the time to clear the platform for the dedicated lane configurations would be the same,
regardless of the distribution of walkers + standers; however, walkers would be “forced” to stand behind standers on the escalator itself, depending on how they were distributed in the queue. In particular, for the previous numerical example, the time to clear the platform for the dedicated lane configurations would be 20 for fast-moving queues and 29 for slow-moving queues, as trivially summarized in
Table 2.
Thus, in general, we have the following “negative” result, in which the makespan is independent of the distribution of the walkers and standers, as long as the queue movement behavior is the same for all customers and the queues are appropriately load balanced.
Proposition 3. For a stand-only two-lane escalator under Assumptions 1–5, the time to clear a completely packed FCFS two-lane queueing platform that is
load-balanced, starting with N customers, is given by (i) for fast-moving queues (both lanes) and (ii) for slow-moving queues (both lanes), where N is assumed to be even.
Although not considered here, note that the same result holds if it were a walking-only two-lane escalator. The load-balancing condition can be dropped if jockeying is allowed, i.e., Assumption 4 is dropped, so we have the following equivalent result:
Corollary 1. For a stand-only two-lane escalator under Assumptions 1–3 and 5, the time to clear a completely packed FCFS
pooled
two-lane queueing platform that starts with N customers is given by (i) for fast-moving queues (both lanes) and (ii) for slow-moving queues (both lanes), where N is assumed to be even.
We now introduce a concept closely related to load balancing, but it has to do with the distribution of the customers between the two classes rather than between the two queues.
Definition 4. The distribution of customers between walkers and standers is said to be
optimally class-balanced
if it minimizes the makespan time of interest.
For the time to clear the queues considered thus far, in the stand-only S-S configuration, a load-balanced queue is optimally balanced for all customer distributions since the time to clear does not depend on the customer type, whereas in the WS configuration, optimal balance occurs only when the distribution is equally split between walkers and standers.
Proposition 4. Under Assumptions 1–5, a completely packed FCFS two-lane S-S queueing platform starting with N customers is optimally class-balanced for the time to clear the queues for all values of .
Proposition 5. Under Assumptions 1–3, a completely packed FCFS two-lane WS queueing platform starting with N customers is optimally class-balanced for the time to clear the queues if and only if , where N is assumed to be even.
“stand-right, walk-left” is suboptimal unless optimally balanced,
Corollary 2. Under Assumptions 1–5, the time to clear a completely packed FCFS two-lane queueing platform starting with N customers for a stand-only (S-S-configured) escalator is no worse than for a “stand-right, walk-left” (WS-configured) escalator, where equality is achieved only when the platform is optimally class-balanced for the WS configuration.
In practice, it is unlikely that optimal balancing between standers and walkers will naturally occur, so for the WS configuration to come close to the performance of the stand-only configuration in terms of clearing the platform, it would be beneficial to “incentivize” customers to do so. On the other hand, in addition to the above conclusion being just for the time to clear the platform, the other assumptions underlying the conclusion have to do with customer behavior/speed, both in terms of boarding the escalator and in behavior in queue. Thus, we now extend the analysis to consider the following:
Total system time;
Unequal boarding times, i.e., two types of service times: normal (X) and quick (), associated with standers and walkers, respectively.
Once the total system time is considered, Proposition 4 no longer holds. Similarly, the latter extension necessitates Proposition 5 be adjusted accordingly to move the optimal balance point away from the equal distribution.
5.2. Total Time to Exit the System
The total time to exit the station requires adding the escalator time and time to walk after alighting from the escalator. For simplicity, we take the time to go from the escalator to the exit to be zero (including alighting), since any additional time can also be approximated by making the escalator longer, and assume no further delay for the walkers on the escalator itself (due to variations in different speeds of the walkers).
The following parameters will be used to estimate the total time to exit the station:
Escalator speed: 2 ft/s, corresponding to stander speed on the escalator;
Walkers add 3 ft/s so their speed on the escalator is 5 ft/s.
Thus, an escalator of 100 ft adds 50 s for standers and 20 s for walkers. Then, the total times to clear the entire system for the WS configuration are as follows (
Table 3):
Example 3. WS configuration with fast-moving customers.
0 + 20: no walkers, last stander 40 + 50 = 90; makespan 90.
5 + 15: last walker 10 + 20 = 30, last stander 30 + 50 = 80; makespan 80.
10 + 10: last walker 20 + 20 = 40, last stander 20 + 50 = 70; makespan 70.
15 + 5: last walker 30 + 20 = 50, last stander 10 + 50 = 60; makespan 60.
20 + 0: last walker 40 + 20 = 60, no standers; makespan 60.
Example 4. WS configuration with slow-moving customers.
0 + 20: no walkers, last stander 59 + 50 = 109; makespan 109.
5 + 15: last walker 14 + 20 = 34, last stander 44 + 50 = 94; makespan 94.
10 + 10: last walker 29 + 20 = 49, last stander 29 + 50 = 79; makespan 79.
15 + 5: last walker 44 + 20 = 64, last stander 14 + 50 = 64; makespan 64.
20 + 0: last walker 59 + 20 = 79, no standers; makespan 79.
However, the average system time may be more relevant, calculated as follows (
Table 4):
Example 5. WS configuration with fast customers.
0 + 20: no walkers, standers 2*(1 + 2 + …+ 20)/20 + 50 = 71.
5 + 15: walkers 2*(1 + 2 + 3 + 4 + 5)/5 + 20 = 26, standers 2*(1 + 2 + …+ 15)/15 + 50 = 66.
10 + 10: walkers 2*(1 + 2 + …+ 10)/10 + 20 = 31, standers 2*(1 + 2 + …+ 10)/10 + 50 = 61.
15 + 5: walkers 2*(1 + 2 + …+ 15)/15 + 20 = 36, standers 2*(1 + 2 + 3 + 4 + 5)/5 + 50 = 56.
20 + 0: no standers, walkers 2*(1 + 2 + …+ 20)/20 + 20 = 41.
Example 6. WS configuration with slow customers.
0 + 20: no walkers, standers (2 + 5 + …56 + 59)/20 + 50 = 80.5.
5 + 15: walkers (2 + 5 + 8 + 11 + 14)/5 + 20 = 28, standers (2 + 5 + …+ 41 + 44)/15 + 50 = 73.
10 + 10: walkers (2 + 5 + …26 + 29)/10 + 20 = 35.5, standers (2 + 5 + …26 + 29)/10 + 50 = 65.5.
15 + 5: walkers (2 + 5 + …+ 41 + 44)/15 + 20 = 43, standers (2 + 5 + 8 + 11 + 14)/5 + 50 = 58.
20 + 0: no standers, walkers (2 + 5 + …56 + 59)/20 + 20 = 50.5.
We introduce the following notation to generalize the results:
= escalator speed (ft/s)
= walking speed (ft/s)
p = proportion of customers who are walkers
= # of customers who are walkers =
= # of customers who are standers =
L = length of the escalator (ft)
= time spent on escalator for walkers =
= time spent on escalator for standers =
Proposition 6. For the WS escalator configuration under Assumptions 1–4, the total time to clear the system starting with a completely packed FCFS queueing platform with N customers is given by
- (i)
for fast-moving queues (both lanes);
- (ii)
for slow-moving queues (both lanes),
where .
The proof of Proposition 6 follows trivially from Proposition 2 and is hence omitted.
Proposition 7. For the WS escalator configuration under Assumptions 1–4, the average time to exit the system starting with a completely packed FCFS queueing platform with N customers is given by
- (i)
- (ii)
.
Proof. The average total time in the system is given by
The summations can be found by applying Lemma 1 and
For (i), it follows directly, since Lemma 1 gives
, and for (ii), applying Lemma 1 gives
, so
which, substituting into the previous quantity, gives
and trivial algebra completes the proof. □
Both Lanes Dedicated (S-S Configuration)
For the S-S configuration where both lanes are dedicated to standers but there are wannabe walkers in the mix, calculating the total time in the system, whether the makespan or average, in general, requires knowing both the distribution and ordering of the walkers and standers, since only walkers in the front of the queue will be able to walk on the escalators and are otherwise “forced” to stand on the escalator if even one walker is in front of them is in queue. To simplify the analysis somewhat, we will now focus on the case where the queues are load-balanced, the number of walkers is no more than half the total, and all the walkers are in the left lane. This makes computing the time to clear the platform very easy because together the assumptions imply that the right lane is full of standers and thus the bottleneck in terms of the makespan; on the other hand, the average still requires further analysis.
Assumption 6. Walkers only occupy the left queue and only board the left escalator lane.
Adding Assumption 6, we have the following results analogous to Proposition 3 and Corollary 1.
Proposition 8. For the stand-only (S-S) escalator configuration under Assumptions 1–6, the total time to clear the system starting with a completely packed FCFS queueing platform that is load-balanced, starting with customers such that , is given by (i) for fast-moving queues (both lanes) and (ii) for slow-moving queues (both lanes), where N is assumed to be even.
Proof. Assumption 6 combined with standers comprising at least half the customers implies that the right queue is completely packed with standers, from which the result follows from Proposition 1. □
The load-balancing condition can again be dropped if jockeying is allowed, i.e., dropping Assumption 4, with Assumption 6 relaxed correspondingly to the following:
Assumption 6’. Walkers only board the left escalator lane.
In this case, we have the following equivalent result:
Corollary 3. For the stand-only (S-S) escalator configuration under Assumptions 1–3, 5, and 6’, the total time to clear the system starting with a completely packed FCFS queueing platform that allows jockeying between the two platform queues, starting with customers such that , is given by (i) for fast-moving queues (both lanes) and (ii) for slow-moving queues (both lanes).
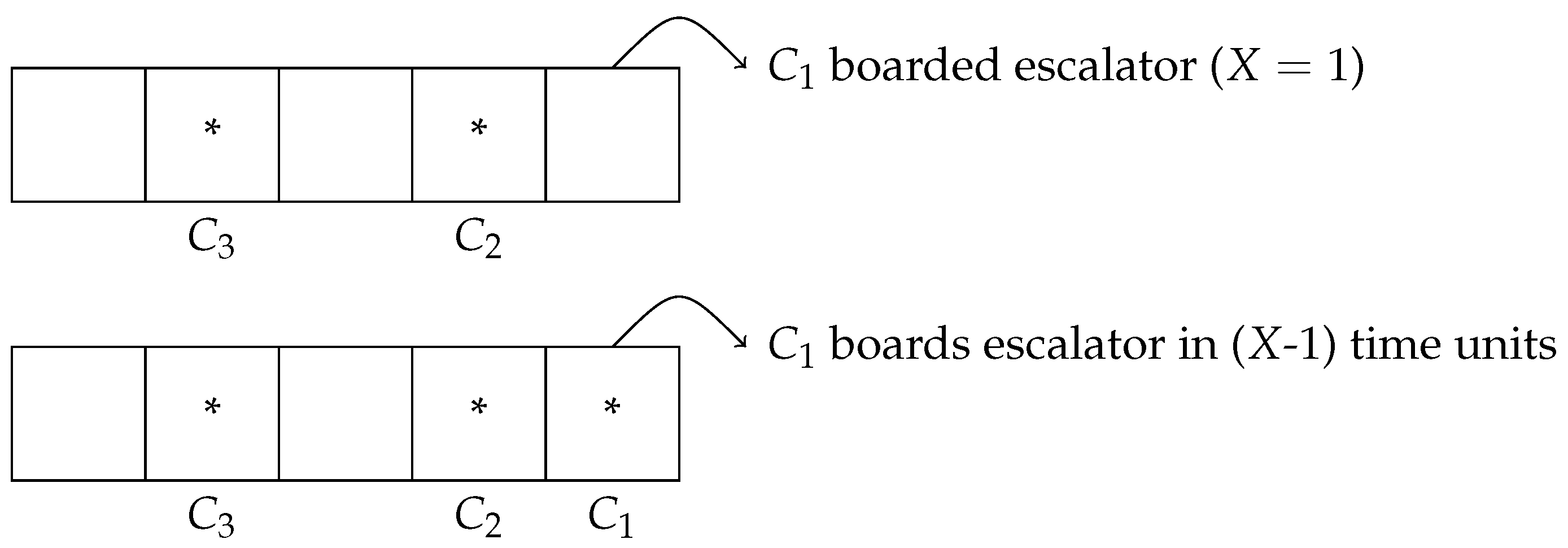
Computing the average system time requires more information on the left queue. The key is to note that the system time of everyone is determined by the location of the first stander in the left lane queue. Specifically, all the walkers in front of that first stander can quickly exit the system, whereas everyone else is “blocked” by that special stander; thus, if the first customer in the left queue is a stander, then everyone takes a long time to exit the system. This special stander is denoted by
, as depicted in
Figure 7 for the two-queue setting.
The result is summarized by the following lemma for a single completely packed FCFS queue, which will correspond to the left lane of the two-lane escalator system when standers are the majority and to the right lane when walkers are the majority:
Lemma 2. Let denote the index of the first stander in a completely packed FCFS single queue. Under Assumptions 1 and 4, the time to exit the system for the ith customer in the queue is given by (i) if and if (for a fast-moving queue) and (ii) if and if (for a slow-moving queue).
Lemma 2 can be applied to calculate the average time to exit in the stand-only (S-S) two-lane escalator configuration.
Proposition 9. For the stand-only (S-S) escalator configuration under Assumptions 1–6, the average time to exit the system starting with a completely packed FCFS queueing platform that is load-balanced, starting with customers such that , is given by
- (i)
- (ii)
where N is assumed to be even, , whereby denotes the index of the first stander in the left lane. In the special case , take (as is not defined).
Proof. The average total time in the system is given by
The summations can be found by applying Lemma 1 and where for (i) and for (ii). Applying Lemma 2 leads to the other terms since is the proportion of walkers who are ahead of the first stander in the left lane, hence the only customers who complete the escalator ride in . □
An implicit assumption is that no passing is allowed on the escalator, which is enforced physically by the model having just two lanes and standers not having space to pass between them. Note that . The best-case scenario would have all walkers in front of the left lane, in which case the conclusions of Proposition 9 simply replace by p, and the worst-case scenario has one stander at the very front of the left queue, resulting in everyone requiring time on the escalator, or .
We return to the numerical example used previously (
, where the customers are split evenly between the two queues, i.e., the left queue and right queue each have 10 customers, with slightly modified distributions—removing the 15-walkers case and considering the worst-case and best-case queues for the 5-walkers case (all in back and all in front, respectively), see
Table 5, where note that we have kept the 20-walkers case, even though Proposition 8 does not apply. For all distributions, the total time to clear the system is 70 for fast walkers and 79 for slow walkers.
5.3. Unequal Boarding Times
For the WS escalator configuration, Propositions 2, 6, and 7 can be easily extended to the case where walkers have a quicker boarding time , where now X is the boarding time for standers. Recall that and denote the number of walkers and standers, respectively.
Proposition 10. For the WS escalator configuration under Assumptions 1–4, , the time to clear a completely packed FCFS two-lane queueing platform that starts with customers is given by
- (i)
for fast-moving queues (both lanes);
- (ii)
for slow-moving queues (both lanes).
Proposition 11. For the WS escalator configuration under Assumptions 1–4, , the total time to clear the system starting with a completely packed FCFS queueing platform with customers, , is given by
- (i)
for fast-moving queues (both lanes);
- (ii)
for slow-moving queues (both lanes).
Proposition 12. For the WS escalator configuration under Assumptions 1–4, , the average time to exit the system starting with a completely packed FCFS queueing platform with customers, , is given by
- (i)
- (ii)
for slow-moving queues (both lanes).
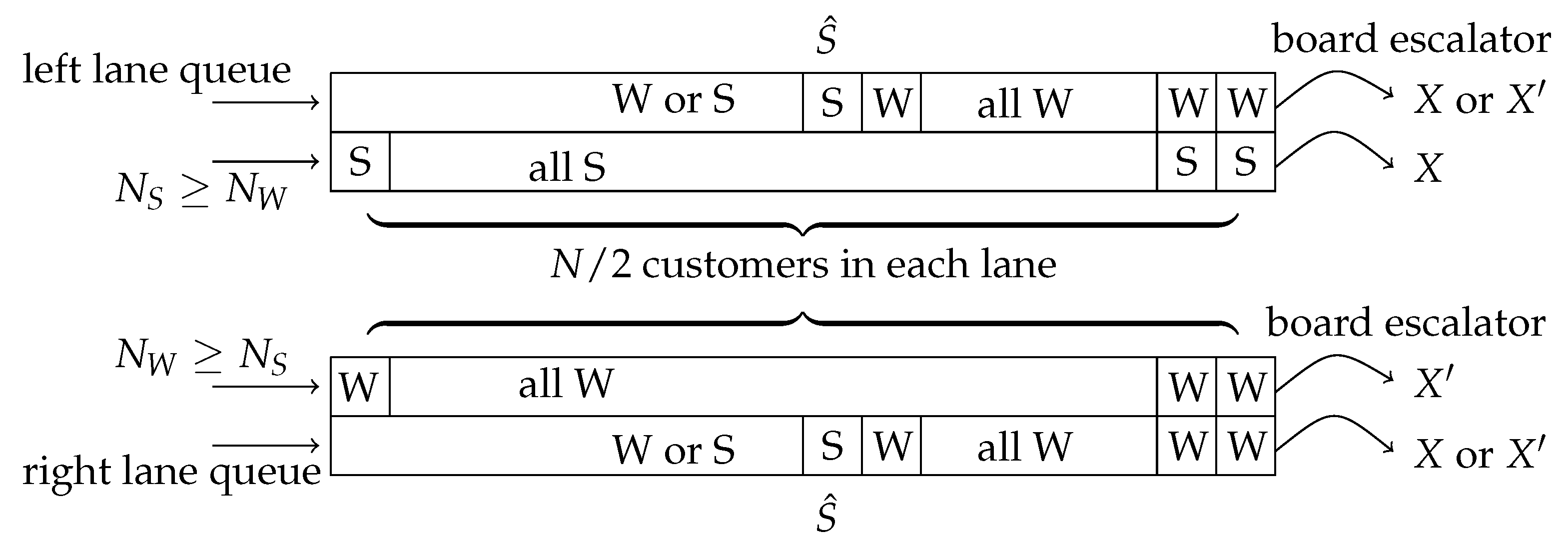
Recall that when the total number of walkers is less than the number of standers, the system times of everyone in the left lane (where all the walkers are assumed to be) are determined by the location of the first stander in the left lane queue, as all the walkers in front of that first stander can quickly exit the system, whereas everyone else is “blocked” by that special stander;
Figure 8 again depicts this special stander denoted by
in the two-queue setting, this time also including the case where the number of walkers is greater than the number of standers, in which case the special stander is in the right lane.
For the stand-only (S-S) escalator system, Proposition 3 and Corollary 1 provide an upper bound when , but otherwise the result can be modified as follows:
Proposition 13. For a stand-only two-lane escalator under Assumptions 1–5, , the time to clear a completely packed FCFS two-lane queueing platform that is
load-balanced, starting with customers, N assumed to be even, is given by
- (i)
for fast-moving queues (both lanes);
- (ii)
for slow-moving queues (both lanes),
when and all walkers are in the left queue, or
- (i)
for fast-moving queues (both lanes);
- (ii)
for slow-moving queues (both lanes),
when and all standers are in the right queue.
The need to separate into two separate cases is to specify that the minority customers are all in the same lane (walkers in left queue, standers in right queue). If that is understood, then the two cases can be combined, with the following expressions for both:
- (i)
for fast-moving queues (both lanes);
- (ii)
for slow-moving queues (both lanes).
Proposition 8, for the total time to clear the system, holds without any necessary changes as long as
because the right queue is the bottleneck, and
only speeds up the left queue since
with walkers all in the left lane. For the case where walkers constitute the majority, a general result could be derived using
Figure 8, but here we specialize only to the best-case scenarios where all the walkers are in the front of the right queue.
Proposition 14. For a stand-only two-lane escalator under Assumptions 1–5, , the total time to clear the system starting with a completely packed FCFS two-lane queueing platform that is
load-balanced, with customers, N even, , and
all walkers are in the front of the right queue, is given by
- (i)
for fast-moving queues;
- (ii)
for slow-moving queues.
A completely generalized version of Proposition 9 for the average time would also require more information regarding queue ordering for the lane with mixed customers; again, here we specialize only to the best-case scenarios where all the walkers are in the front of the left queue, which coincides with the WS result in Proposition 12.
Proposition 15. For the stand-only (S-S) escalator configuration under Assumptions 1–6, the average time to exit the system starting with a completely packed FCFS queueing platform that is
load-balanced, starting with customers such that , N assumed to be even, , and
all walkers are in the front of the left queue, is given by
- (i)
for fast-moving queues (both lanes);
- (ii)
for slow-moving queues (both lanes).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}