


Based on Improved NSGA-II Algorithm for Solving Time-Dependent Green Vehicle Routing Problem of Urban Waste Removal with the Consideration of Traffic Congestion: A Case Study in China


Abstract
1. Introduction
1.1. Related work
1.1.1. VRP
1.1.2. GVRP
1.1.3. TDGVRP
1.1.4. Non-Dominated Sorting Genetic Algorithm
1.2. Our Contributions and Overview of the Paper
- In this paper, we introduce traffic congestion coefficients to simulate the congestion level of roads at different time periods, and consider constraints such as multiple vehicle types, multiple vehicle visits, different vehicle departure moments, and time windows to construct and solve a multi-objective model with minimum total economic cost and minimum total timeout. The traditional NSGA-II algorithm search weak search capability and poor convergence in solving multi-objectives, so we design a DCD-DE-NSGAII algorithm based on Dynamic Crowding Distance and Differential Evolution;
- The model and the proposed algorithm can give reasonable vehicle scheduling scheme according to the preference of decision maker, which can provide solutions and suggestions for government departments to solve the problems of untimely urban waste removal and high cost of collection and transportation.
2. Problem and Model
2.1. Problem Description
- (1)
- The garbage truck has two types of heavy load (maximum load: 8 tons) and light duty (maximum load: 5 tons). There are 45 garbage trucks in total in the City Administration Environmental Sanitation Department. All garbage trucks must return to the Sanitation Department before 18:00;
- (2)
- According to the actual needs, different vehicles can set off at different times, but it must be ensured that a garbage truck is sent out at 5: 30 am, and the rest of the garbage trucks can be sent out in succession;
- (3)
- The vehicle runs at a normal speed during the normal driving period, and runs at a congestion speed during the traffic congestion period;
- (4)
- For stations with a high volume of waste, determine which vehicles will be transported according to the nearest principle;
- (5)
- The amount of garbage loaded cannot exceed the maximum capacity of the vehicle, and if a garbage truck is not full at a transfer station, it can be judged according to the nearest principle whether the truck should go to the next transfer station to continue loading;
- (6)
- Each garbage transfer station has a service time window requirement. Each garbage transfer station does not have the earliest time window requirement, but has the latest time window requirement. The time for each garbage station to complete the day’s cleaning task exceeds its latest time window;
- (7)
- Not all of the 45 garbage trucks have to be sent out. If the car in front of them can ensure that the amount of garbage can be delivered for the day, stop the departure; the drivers of garbage trucks have a rest from 12:00–14:30 noon, and the drivers who arrive at the transfer station during this time will have a rest, and not carry out garbage transportation;
- (8)
- All garbage of all garbage transfer stations must be cleared daily;
- (9)
- The usage cost includes vehicle travel time cost, service time cost and fixed departure cost;
- (10)
- The service time for the vehicles to collect garbage at each transfer station is 10 min, and the time for the garbage trucks to reach the incineration plant to unload garbage is also 10 min. In addition, during the service period, the engine is closed without fuel consumption and carbon emissions;
- (11)
- Using multiple models for distribution, the weight, maximum load and fixed start-up cost of each model are different;
- (12)
- It is assumed that the daily traffic congestion time periods are 7:00–9:00 and 17:00–18:00 respectively, and the rest of the time periods are set as normal driving time periods.
2.2. Symbols and Variables
2.3. Mathematical Model
2.4. Fuel Consumption and Carbon Emissions Calculation
2.5. Calculation of Vehicle Travel Time
3. Solution Algorithm Design
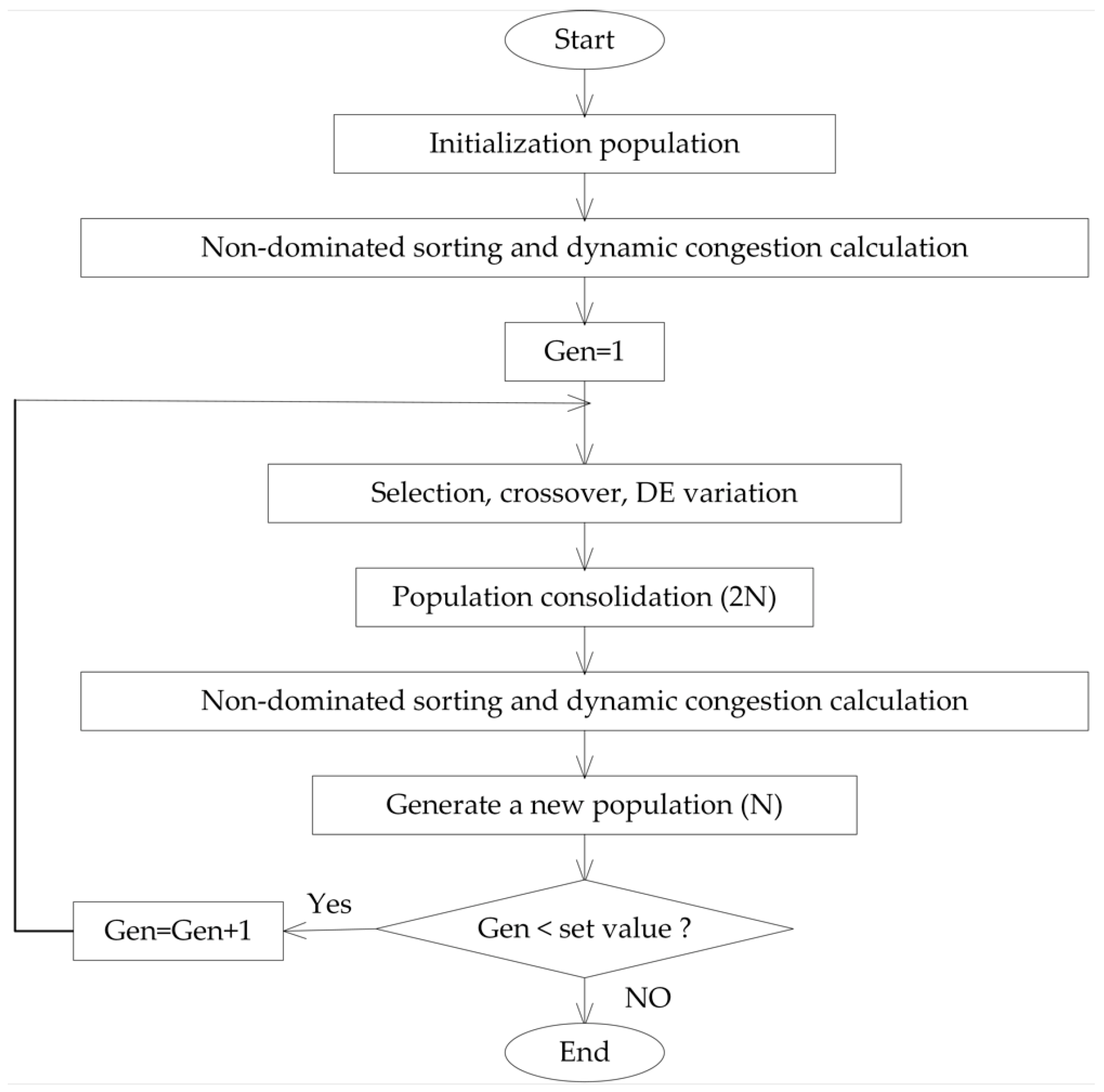
3.1. Improved DCD-DE-NSGAII Algorithm
- (1)
- Differential mutation operation [32]
- (2)
- Improvement of scaling factor [32]
- (3)
- Improvement of crossover and mutation probability
3.2. Algorithmic Flow
4. Case Analysis
4.1. Instance Data and Parameter Settings
4.2. Algorithm Performance Analysis
4.3. Solution Result Analysis

{kind=link}
{kind=link}
{kind=link}
| Total Economic Cost/(Yuan) | Total Timeout /(min) | Fuel Consumption Cost/(Yuan) | Carbon Emissions Cost/(Yuan) | Vehicle Use Cost/(Yuan) | Wage Cost/(Yuan) | Carbon Emissions Ratio/(%) | |
|---|---|---|---|---|---|---|---|
| 25,940.00 | 921.15 | 2945.40 | 627.10 | 18,425.00 | 3941.80 | 2.42 | |
| 27,217.00 | 615.16 | 3116.20 | 663.45 | 19,303.00 | 4134.50 | 2.44 |
4.4. Solution Analysis
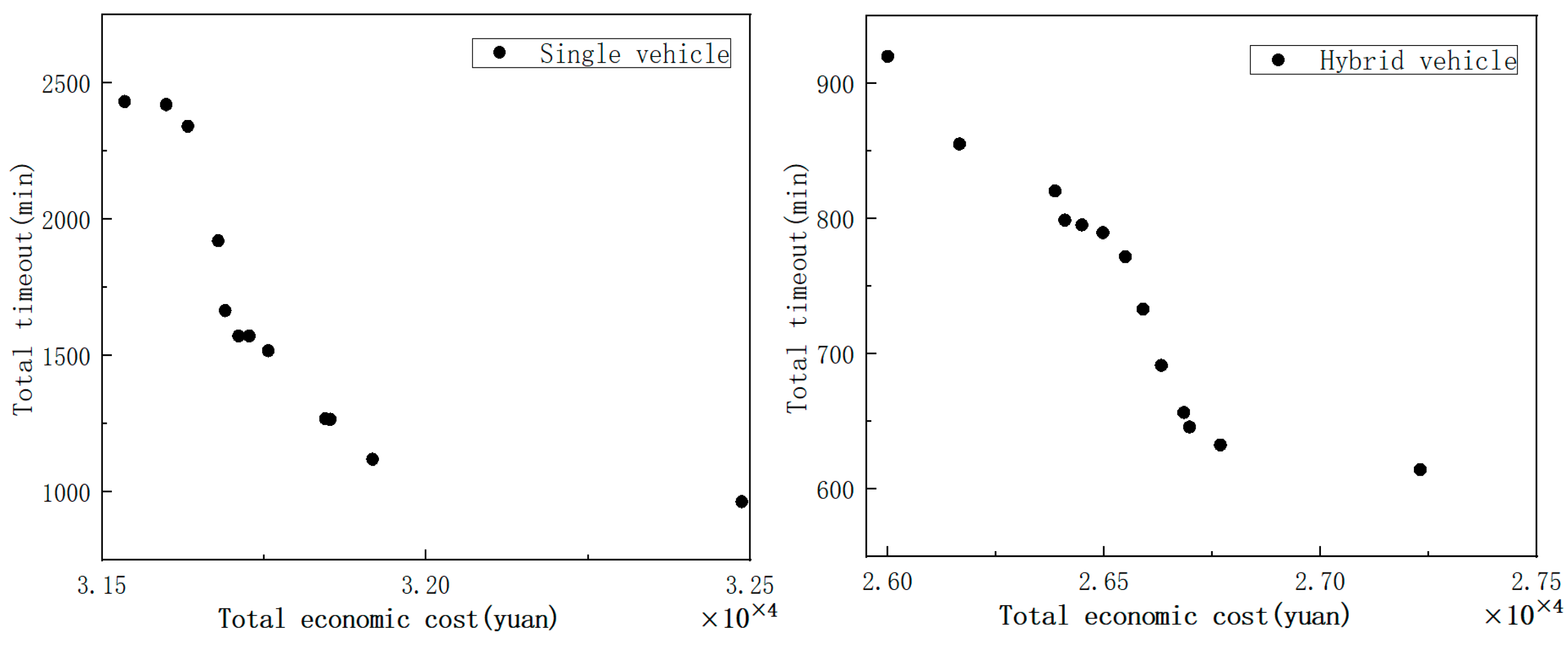
4.5. Comparative Analysis of Different Models
5. Conclusions
- The model comprehensively considers environmental protection, economy and timeliness, and balances the interests between the government and garbage removal enterprises. The proposed optimization model is more in line with the actual situation of the current urban solid garbage removal and has strong practicability;
- The dynamic congestion ranking strategy and differential variation operation are introduced into the NSGA-II algorithm, which improves the solution performance of the algorithm to some extent;
- The model and algorithm proposed can effectively solve the vehicle scheduling problem of MSW removal considering the effect of time-dependent speed and carbon emissions. It can provide decision basis for decision makers with different preferences to choose reasonable waste removal paths and waste collection schemes.
- In this paper, the results of the single model and the mixed model are compared and analyzed. The results show that the number of vehicles, the total driving distance, the total fuel consumption, the total service time and the cost of the mixed model are greatly reduced compared with the single model. It shows that the government departments can increase more heavy-duty garbage trucks, which can improve the efficiency of garbage removal, reduce the use of vehicles and reduce expenses;
- In this paper, the different departure time of the vehicle is optimized reasonably, which can effectively avoid the traffic congestion period, shorten the driving time of the vehicle, improve the efficiency of garbage removal and reduce the economic cost.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Molina, J.C.; Eguia, I.; Racero, J. Reducing pollutant emissions in a waste collection vehicle routing problem using a variable neighborhood tabu search algorithm: A case study. TOP 2019, 27, 253–287. [Google Scholar] [CrossRef]
- Nurprihatin, F.; Lestari, A. Waste Collection Vehicle Routing Problem Model with Multiple Trips, Time Windows, Split Delivery, Heterogeneous Fleet and Intermediate Facility. Eng. J. 2020, 24, 55–64. [Google Scholar] [CrossRef]
- Farrokhi-Asl, H.; Tavakkoli-Moghaddam, R.; Asgarian, B. Metaheuristics for a bi-objective location-routing-problem in waste collection management. J. Ind. Prod. Eng. 2017, 34, 239–252. [Google Scholar] [CrossRef]
- Rabani, M.; Manavizadeh, N.; Boostani, A.; Aghamohamadi, S. A multi-objective model for the residential waste collection location-routing problem with time windows. J. Ind. Syst. Eng. 2020, 12, 227–241. [Google Scholar]
- Hina, S.M.; Szmerekovsky, J.; Lee, E.S.; Amin, M.; Arooj, S. Effective municipal solid waste collection using geospatial information systems for transportation: A case study of two metropolitan cities in Pakistan. Res. Transp. Econ. 2020, 84, 100950. [Google Scholar] [CrossRef]
- Ahlaqqach, M.; Benhra, J.; Mouatassim, S.; Lamrani, S. Multi-objective Optimization of Heterogeneous Vehicles Routing in the Case of Medical Waste Using Genetic Algorithm. Smart Appl. Data Anal. 2020, 1207, 256–269. [Google Scholar]
- Dereci, U.; Karabekmez, M.E. The applications of multiple route optimization heuristics and meta-heuristic algorithms to solid waste transportation: A case study in Turkey. Decis. Anal. J. 2022, 4, 100113. [Google Scholar] [CrossRef]
- Niu, Y.Y.; Yang, Z.H.; Chen, P.; Xiao, J. Optimizing the green open vehicle routing problem with time windows by minimizing comprehensive routing cost. J. Clean. Prod. 2018, 171, 962–971. [Google Scholar] [CrossRef]
- Rauniyar, A.; Nath, R.; Muhuri, P.K. Multi-factorial evolutionary algorithm based novel solution approach for multi-objective pollution-routing problem. Comput. Ind. Eng. 2019, 130, 757–771. [Google Scholar] [CrossRef]
- Qiu, J.; Sun, J.; Zhong, Z. A multi-objective green vehicle routing optimization algorithm based on delivery benefit blance. Control Decis. 2023, 38, 365–371. [Google Scholar] [CrossRef]
- Zhou, G.; Ji, B.; Fang, X. Research on green vehicle routing problem and algorithm of multi-to-many cross-docking. J. Railw. Sci. Eng. 2022, 19, 2202–2210. [Google Scholar] [CrossRef]
- Zhou, X.; Jiang, T.; He, C.; Wang, L.; Yang, L. Green Vehicle Routing Model and Its Solution Algorithm in Cold-chain Logistics Distribution. Chin. J. Manag. Sci. 2016, 1–11. [Google Scholar] [CrossRef]
- Erdoğdu, K.; Karabulut, K. Bi-objective green vehicle routing problem. Int. Trans. Oper. Res. 2022, 29, 1602–1626. [Google Scholar] [CrossRef]
- Soysal, M.; Çimen, M.; Mine, Ö.; Belbağ, S. Performance Comparison of Two Recent Heuristics for Green Time Dependent Vehicle Routing Problem. Int. J. Bus. Anal. 2019, 6, 11. [Google Scholar] [CrossRef]
- Çimen, M.; Soysal, M. Time-dependent green vehicle routing problem with stochastic vehicle speeds: An approximate dynamic programming algorithm. Transp. Res. Part D Transp. Environ. 2017, 54, 82–98. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, C.; Zhou, K.J.; He, C.H.; Huang, X. Improved ant colony algorithm and modeling of time-dependent green vehicle routing problem. J. Manag. Sci. China 2019, 22, 57–68. [Google Scholar]
- Zhou, X.; Lv, Y.; He, C.; Liu, C.; Yang, K. Multi-depot green vehicle routing model and its optimization algorithm with time-dependent speed. Control Decis. 2022, 37, 473–482. [Google Scholar] [CrossRef]
- Ge, X.; Ran, X. Study on the Optimization of Pollution Routing Problem with Time-dependent Traffic Congestion. Ind. Eng. Manag. 2020, 25, 75–93. [Google Scholar]
- Chen, C.; Liu, Y.P.; Lin, Q.T.; Li, Q.N. On Time and Space Dependent Vehicle Routing Problem in Urban Delivery. Ind. Eng. Manag. 2021, 26, 56–62. [Google Scholar]
- Zhu, L.; Ma, X.; Liu, Z. Time-dependent Green Vehicle Routing Problem. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 187–194. [Google Scholar] [CrossRef]
- Luo, H.; Dridi, M.; Grunder, O. A branch-price-and-cut algorithm for a time-dependent green vehicle routing problem with the consideration of traffic congestion. Comput. Ind. Eng. 2023, 177, 109093. [Google Scholar] [CrossRef]
- Liu, Y.; Roberto, B.; Zhou, J.; Yu, Y.; Zhang, Y.; Sun, W. Efficient Feasibility Checks and an Adaptive Large Neighborhood Search Algorithm for the Time-Dependent Green Vehicle Routing Problem with Time Windows. Eur. J. Oper. Res. 2023, in press. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A Fast Elitist Non-dominated Sorting Genetic Algorithm for Multi-objective Optimization: NSGA-II. In Proceedings of the 6th International Conference, Paris, France, 18–20 September 2000; pp. 849–858. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Verma, S.; Pant, M.; Snasel, V. A comprehensive review on NSGA-II for multi-objective combinatorial optimization problems. IEEE Access 2021, 9, 57757–57791. [Google Scholar] [CrossRef]
- Xu, H.; Fan, W.; Wei, T.; Yu, L. An Or-opt NSGA-II algorithm for multi-objective Vehicle Routing Problem with Time Windows. In Proceedings of the 2008 IEEE International Conference on Automation Science and Engineering, Arlington, VA, USA, 23–26 August 2008; pp. 309–314. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Enayatollahi, F.; Thulasiraman, P. Traffic aware many-objective dynamic route planning. In Proceedings of the 2019 IEEE Symposium Series on Computational Intelligence (SSCI), Xiamen, China, 6–9 December 2019; pp. 1241–1248. [Google Scholar]
- Wang, Y.; Zhang, J.; Assogba, K.; Liu, Y.; Xu, M.; Wang, Y. Collaboration and transportation resource sharing in multiple centers vehicle routing optimization with delivery and pickup. Knowl. Based Syst. 2018, 160, 296–310. [Google Scholar] [CrossRef]
- Srivastava, G.; Singh, A.; Mallipeddi, R. NSGA-II with objective-specific variation operators for multiobjective vehicle routing problem with time windows. Expert Syst. Appl. 2021, 176, 114779. [Google Scholar] [CrossRef]
- Barth, M.; Younglove, T.; Scora, G. Development of a Heavy-Duty Diesel Modal Emissions and Fuel Consumption Model; UC Berkeley; California Partners for Advanced Transportation Technology: Berkeley, CA, USA, 2005. [Google Scholar]
- Shi, S.; Zhang, X.; Wang, Z. An Improved NSGA-Il Algorithm Based on Dynamic Crowding Distance and Adaptive t-Distribution Crossover. Comput. Simul. 2019, 36, 257–262. [Google Scholar]
- Zheng, X.; Ma, L. An improved NSGA-II algorithm for multi-objective nonlinear optimization. Microelectron. Comput. 2020, 37, 47–53. [Google Scholar]



| Symbol | Meaning | Symbol | Meaning |
|---|---|---|---|
| Collection of refuse transfer stations, ; | Municipal sanitation department and waste incineration plant collection, ; | ||
| Node set, ; | Road set between nodes; | ||
| The distance from node to node ; | Vehicle h set, ; | ||
| Number of light-duty garbage trucks; | Number of heavy-duty garbage trucks; | ||
| The maximum load of light load garbage trucks; | The maximum load of heavy-duty garbage truck; | ||
| Maximum load collection of garbage trucks; ; | Daily garbage volume of transfer station ; | ||
| The amount of garbage loaded by vehicle at transfer station ; | The latest time that each transfer station allows service; | ||
| The set of time period ; | The start time of time period ; | ||
| The end time of time period ; | Vehicle speed in non-congested time period; | ||
| Vehicle speed during congested time periods; | Time of arrival of vehicle to transfer station; | ||
| Time of vehicle h leaving transfer station ; | Service time of vehicle at transfer station ; | ||
| The time when all the garbage in the transfer station has been removed; | Unit fuel consumption cost, unit one liter; | ||
| Unit carbon emissions cost, unit kg; | Unit time cost of vehicle use, unit min; | ||
| Driver unit time wage cost, unit hour; | Fixed departure fee for garbage truck, unit vehicle; ; | ||
| Light-duty garbage truck fixed departure fee, unit vehicle; | Heavy-duty garbage truck fixed departure cost, unit vehicle; | ||
| The speed of the vehicle on the road during time period ; | The time of vehicle running the whole road ; | ||
| The mileage of vehicle h on road at speed in time period ; | The time that vehicle travels on the road at speed in time period ; | ||
| The fuel consumption of vehicle h on road in time period , unit one liter; | The carbon emissions of vehicle h on road in time period , unit kg; | ||
| 0–1 variable with a value of 1 when transit station is served by vehicle and 0 otherwise; | 0–1 variable, which is 1 when there is a vehicle on the road, otherwise 0; | ||
| 0–1 variable, 1 when the vehicle is used, 0 otherwise; | 0–1 variable, when the vehicle travels from node to node , it is 1, otherwise it is 0. | ||
| 0–1 variable, 1 when vehicle travels from node to node in time period , 0 otherwise; |
| Serial Number | Site Name | X-Coordinate (m) | Y-Coordinate (m) | Average Daily Refuse Production (t) | Time Window |
|---|---|---|---|---|---|
| 1 | City Administration | 33,250,196.3 | 7,531,852.0 | —— | [5:30–18:00] |
| 2 | Wangjiashan | 33,246,232.1 | 7,535,882.4 | 42.00 | 738 |
| 3 | Oriental Pearl | 33,249,124.5 | 7,527,993.1 | 24.00 | 958 |
| 4 | Xiangyang | 33,256,135.7 | 7,532,931.6 | 25.78 | 518 |
| 5 | Oriental City | 33,250,892.1 | 7,531,310.0 | 27.60 | 692 |
| 6 | Sixth Middle School | 33,246,145.4 | 7,530,181.7 | 36.69 | 531 |
| 7 | Junmin Road | 33,249,685.5 | 7,532,563.7 | 38.74 | 942 |
| 8 | Nantang | 33,247,479.0 | 7,527,277.2 | 10.52 | 482 |
| 9 | Zhongcun | 33,245,589.9 | 7,527,948.3 | 15.00 | 852 |
| 10 | Yongtai | 33,244,264.5 | 7,530,779.9 | 12.00 | 872 |
| 11 | Rainfield | 33,244,685.2 | 7,534,773.1 | 23.08 | 897 |
| 12 | Harvest Garden | 33,252,294.8 | 7,528,515.5 | 31.42 | 521 |
| 13 | Sand pond | 33,246,762.0 | 7,529,212.0 | 20.00 | 672 |
| 14 | Zhaoming | 33,247,914.7 | 7,524,648.2 | 2.66 | 605 |
| 15 | Jinshan Road | 33,247,578.5 | 7,537,081.8 | 16.58 | 864 |
| 16 | Quarrying stone | 33,242,389.4 | 7,533,118.6 | 11.00 | 687 |
| 17 | Jin’an Jiayuan | 33,247,757.8 | 7,528,040.5 | 27.28 | 917 |
| 18 | Jin Rui | 33,249,534.5 | 7,527,329.2 | 23.36 | 567 |
| 19 | West Lake Garden | 33,249,676.4 | 7,529,831.8 | 55.46 | 607 |
| 20 | New workshop | 33,245,222.5 | 7,527,303.0 | 4.82 | 550 |
| 21 | Hengxing | 33,244,276.6 | 7,527,534.3 | 4.50 | 545 |
| 22 | Ten districts | 33,244,746.2 | 7,530,784.7 | 27.12 | 897 |
| 23 | Yingcui | 33,244,726.5 | 7,532,763.1 | 38.80 | 758 |
| 24 | Pearl garden | 33,246,910.1 | 7,531,456.9 | 36.08 | 744 |
| 25 | Plum garden | 33,248,855.2 | 7,531,184.5 | 38.99 | 550 |
| 26 | Spring light | 33,249,306.6 | 7,532,285.6 | 39.00 | 889 |
| 27 | Royal view garden | 33,253,746.8 | 7,532,021.4 | 6.66 | 779 |
| 28 | Xiangshan Waste Incineration Plant | 33,262,273.8 | 7,532,404.0 | —— | —— |
| Vehicle Type | Vehicle Count | Weight/(t) | Load/(t) | Cost/(Yuan) |
|---|---|---|---|---|
| light load | 37 | 8 | 5 | 200 |
| heavy load | 8 | 10 | 8 | 300 |
| Sign | Parameter Value | Sign | Parameter Value | Sign | Parameter Value |
|---|---|---|---|---|---|
| 6.5 yuan/L | 0.0528 yuan/kg. | 1.5 yuan/min | |||
| 0.5 yuan/min | 200 yuan/car | 300 yuan/car | |||
| 2.621 kg/L | 600 m/min | 300 m/min |
| Algorithm | Total Economic Cost/(Yuan) | Total Timeout/(min) | ||||
|---|---|---|---|---|---|---|
| Optimal Solution | Worst Solution | Average Solution | Optimal Solution | Worst Solution | Average Solution | |
| NSGAII | 26,618.00 | 27,183.00 | 26,869.43 | 633.18 | 1355.80 | 931.94 |
| DCD-DE-NSGAII | 25,940.00 | 27,217.00 | 26,503.38 | 615.16 | 921.15 | 748.51 |
| Improved ratio | 2.55 | −0.12 | 1.36 | 2.85 | 32.1 | 19.68 |
| Vehicle Number | Vehicle Type | Vehicle Scheduling Path | Departure Times |
|---|---|---|---|
| 1 | heavy load | 1–19–28–19–28–27–12–28–22–23–28–17–28–26–28–11–28–1 | 7 |
| 2 | heavy load | 1–19–28–19–28–4–28–6–22–28–5–28–18–28–11–28–1 | 7 |
| 3 | heavy load | 1–19–28–14–21–12–6–28–10–16–28–18–25–28–11–28–1 | 5 |
| 4 | light load | 1–19–28–27–28–4–28–23–28–17–28–25–26–28–7–28–1 | 7 |
| 5 | heavy load | 1–19–28–12–28–22–28–24–17–28–26–28–7–28–1 | 6 |
| 6 | light load | 1–19–14–28–6–28–24–28–2–28–7–28–1 | 5 |
| 7 | heavy load | 1–13–28–4–6–28–24–28–2–28–7–28–1 | 5 |
| 8 | light load | 1–13–28–6–28–24–28–2–28–7–28–1 | 5 |
| 9 | heavy load | 1–13–12–28–22–28–5–28–25–28–7–28–1 | 5 |
| 10 | light load | 1–12–28–6–28–24–28–18–28–15–28–1 | 5 |
| 11 | heavy load | 1–12–28–23–28–5–28–25–28–15–28–1 | 5 |
| 12 | light load | 1–4–28–23–28–5–17–2–28–15–28–1 | 4 |
| 13 | light load | 1–6–28–23–16–28–2–28–3–28–1 | 4 |
| 14 | light load | 1–6–28–20–24–28–18–28–3–28–1 | 4 |
| 15 | heavy load | 1–6–28–16–28–2–25–28–3–28–1 | 4 |
| 16 | light load | 1–22–28–24–28–25–28–3–28–1 | 4 |
| 17 | light load | 1–23–28–17–28–25–28–3–28–1 | 4 |
| 18 | light load | 1–23–28–2–28–1 | 2 |
| 19 | light load | 1–10–28–2–28–1 | 2 |
| 20 | light load | 1–16–17–28–25–28–1 | 2 |
| 21 | light load | 1–24–28–25–28–1 | 2 |
| 22 | light load | 1–26–28–1 | 1 |
| 23 | light load | 1–26–28–1 | 1 |
| 24 | light load | 1–26–28–1 | 1 |
| 25 | light load | 1–26–8–9–28–1 | 1 |
| 26 | light load | 1–8–28–1 | 1 |
| 27 | light load | 1–8–28–1 | 1 |
| 28 | light load | 1–9–28–1 | 1 |
| 29 | light load | 1–9–28–1 | 1 |
| 30 | light load | 1–9–28–1 | 1 |
| Total | 103 |
| Vehicle Number | Vehicle Type | Vehicle Clearance Time |
|---|---|---|
| 1 | heavy load | 330–333.48–374.91–396.33–445.53–473.98–496.63–551.16–580.50–593.80–643.05–668.31–713.57–735.19–776.80–899.58–949.16–969.31 |
| 2 | heavy load | 348–351.48–392.91–414.33–477.19–497.73–538.26–566.27–578.81–628.14–647.20–686.26–709.11–751.97–899.58–949.16–969.31 |
| 3 | heavy load | 362–365.48–406.91–448.21–473.69–510.62–540.93–588.06–618.20–633.19–686.36–709.21–725.74–768.19–899.58–949.16–969.31 |
| 4 | light load | 381–384.48–425.91–454.36–502.81–523.34–556.94–586.19–635.44–660.71–705.97–728.43–740.41–782.02–890.98–931.96–952.11 |
| 5 | heavy load | 397–400.48–453.81–489.51–545.21–574.55–623.88–649.54–665.41–710.67–732.28–773.89–890.98–931.96–952.11 |
| 6 | light load | 412–415.48–443.73–518.13–556.19–603.33–628.99–674.64–702.00–749.36–890.98–931.96–952.11 |
| 7 | heavy load | 425–439.44–512.23–532.76–560.03–607.17–632.82–678.48–705.84–753.19–890.98–931.96–952.11 |
| 8 | light load | 436–450.44–523.23–558.75–605.88–631.54–677.19–704.55–751.91–890.98–931.96–952.11 |
| 9 | heavy load | 453–467.44–496.03–550.86–580.20–629.54–648.59–687.65–710.11–752.56–890.98–931.96–952.11 |
| 10 | light load | 468–481.14–536.84–565.55–612.69–638.34–684.00–706.85–749.71–895.70–941.41–961.56 |
| 11 | heavy load | 485–498.14–551.92–581.17–630.42–649.48–688.54–711–753.45–895.71–941.41–961.56 |
| 12 | light load | 500–520.12–555.33–584.58–633.83–652.89–670.44–693.75–741.11–895.70–941.41–961.56 |
| 13 | light load | 519–533.61–580.74–610.00–623.94–677.09–704.45–751.81–893.12–936.23–956.38 |
| 14 | light load | 533–543.80–590.94–620.60–638.07–683.73–706.58–749.43–893.12–936.23–956.38 |
| 15 | heavy load | 541–548.30–595.44–628.60–681.76–709.12–728.09–770.54–893.12–936.23–956.38 |
| 16 | light load | 561–570.26–619.59–645.25–690.90–713.36–755.82–893.12–936.23–956.38 |
| 17 | light load | 576–585.24–634.49–659.76–705.02–727.48–769.93–893.12–936.23–956.38 |
| 18 | light load | 592–601.24–650.49–677.85–725.21–890.15 |
| 19 | light load | 602–612.05–662.18–689.54–736.90–890.15 |
| 20 | light load | 623–636.18–658.49–703.76–726.22–768.67–890.15 |
| 21 | light load | 639–644.52–690.17–712.63–755.08–890.15 |
| 22 | light load | 848–849.65–891.26–911.41 |
| 23 | light load | 849–850.65–892.26–912.41 |
| 24 | light load | 860–861.65–903.26–923.41 |
| 25 | light load | 861–862.64–881.54–894.88–943.66–963.81 |
| 26 | light load | 865–873.87–919.96–940.11 |
| 27 | light load | 870–878.87–924.96–945.11 |
| 28 | light load | 875–885.06–933.84–953.99 |
| 29 | light load | 878–888.06–936.84–956.99 |
| 30 | light load | 888–898.06–946.84–966.99 |
| Total Driving Distance/(km) | Total Fuel Consumption/(L) | Total Service Time/(min) | Number of Vehicles Used/(Vehicle) | Total Number of Departures/(Times) | |
|---|---|---|---|---|---|
| 3111.08 | 458.67 | 7962.56 | 30 | 103 | |
| 3266.19 | 479.41 | 8268.94 | 31 | 108 |
| Vehicle Type | Total Economic Cost/(Yuan) | Total Timeout /(min) | Fuel Consumption Cost/(Yuan) | Carbon Emissions Cost/(Yuan) | Vehicle Cost /(Yuan) | Wage Cost /(Yuan) |
|---|---|---|---|---|---|---|
| Single model | 31,784.04 | 1675.84 | 3693.41 | 786.35 | 22,474.04 | 4830.24 |
| Hybrid model | 26,503.38 | 748.51 | 3003.42 | 639.45 | 18,847.31 | 4013.21 |
| Optimized ratio% | 16.61 | 55.34 | 18.68 | 18.68 | 16.14 | 16.91 |
| Vehicle Type | Total Driving Distance/(km) | Total Fuel Consumption/(L) | Total Service Time/(min) | Number of Vehicles Used/(Vehicle) | Total Number of Departures/(Time) |
|---|---|---|---|---|---|
| Single model | 3822.9 | 565.94 | 9636.01 | 39 | 129 |
| Hybrid model | 31,11.08 | 458.67 | 7962.56 | 30 | 103 |
| Optimized ratio% | 18.62 | 18.95 | 17.37 | 23.08 | 20.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Z.; Xu, X.; Hu, Y.; Wang, H.; Zhou, C.; Zhang, H. Based on Improved NSGA-II Algorithm for Solving Time-Dependent Green Vehicle Routing Problem of Urban Waste Removal with the Consideration of Traffic Congestion: A Case Study in China. Systems 2023, 11, 173. https://doi.org/10.3390/systems11040173
Gao Z, Xu X, Hu Y, Wang H, Zhou C, Zhang H. Based on Improved NSGA-II Algorithm for Solving Time-Dependent Green Vehicle Routing Problem of Urban Waste Removal with the Consideration of Traffic Congestion: A Case Study in China. Systems. 2023; 11(4):173. https://doi.org/10.3390/systems11040173
Chicago/Turabian StyleGao, Zhenhua, Xinyu Xu, Yuhuan Hu, Hongjun Wang, Chunliu Zhou, and Hongliang Zhang. 2023. "Based on Improved NSGA-II Algorithm for Solving Time-Dependent Green Vehicle Routing Problem of Urban Waste Removal with the Consideration of Traffic Congestion: A Case Study in China" Systems 11, no. 4: 173. https://doi.org/10.3390/systems11040173
APA StyleGao, Z., Xu, X., Hu, Y., Wang, H., Zhou, C., & Zhang, H. (2023). Based on Improved NSGA-II Algorithm for Solving Time-Dependent Green Vehicle Routing Problem of Urban Waste Removal with the Consideration of Traffic Congestion: A Case Study in China. Systems, 11(4), 173. https://doi.org/10.3390/systems11040173