
Multisensor Feature Fusion Based Rolling Bearing Fault Diagnosis Method




Abstract
:1. Introduction
- (1)
- A multisensor signals-based feature fusion method is proposed for one-dimensional vibration signals.
- (2)
- The vibration signal of each sensor is preprocessed with VMD, and the time domain, frequency domain and multiscale entropy features of the signal are extracted and fused into one multidomain feature dataset.
- (3)
- To promote further fusion of features, a novel deep autoencoder network is proposed for feature extraction and classification.
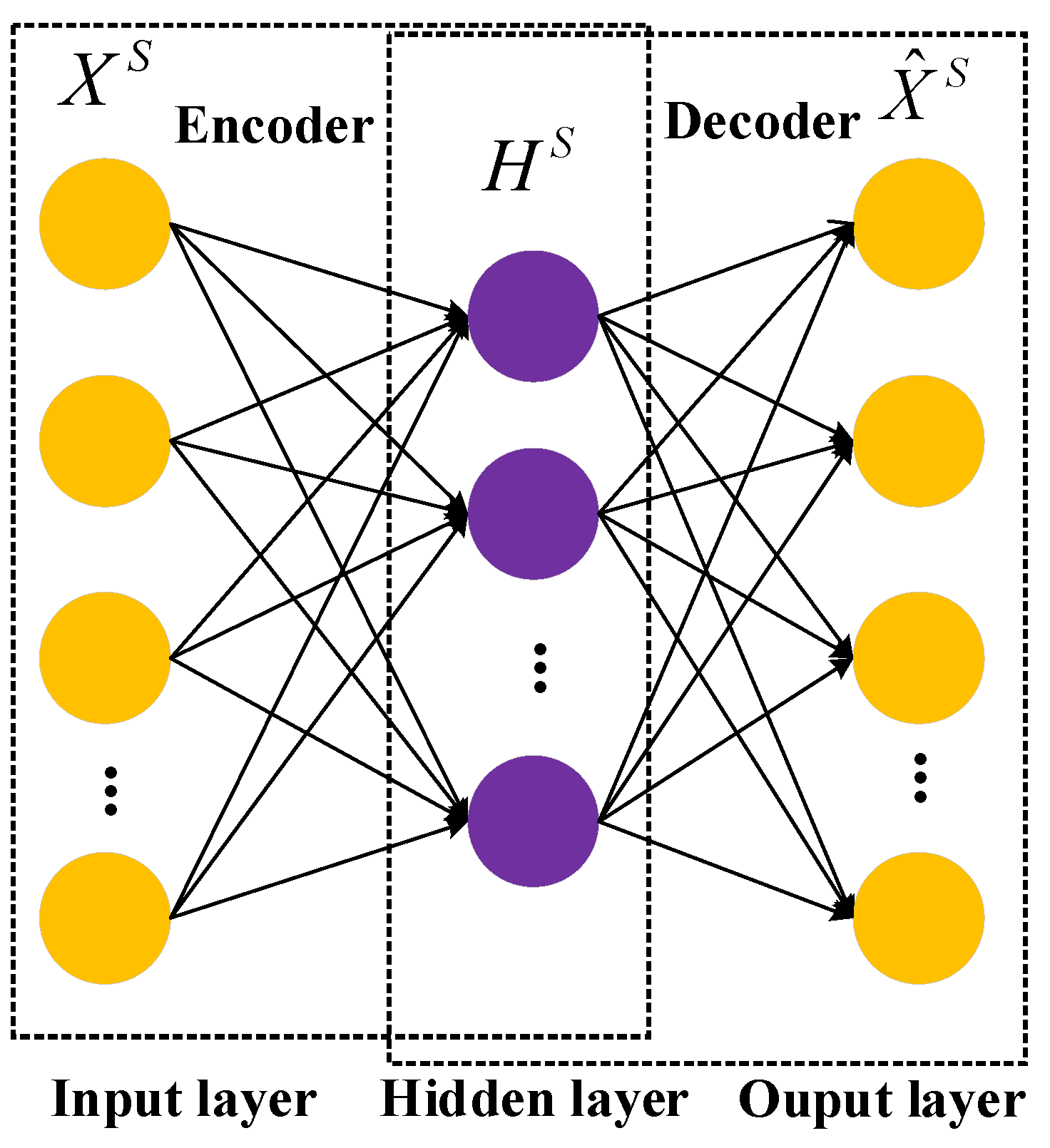
2. Theoretical Basis
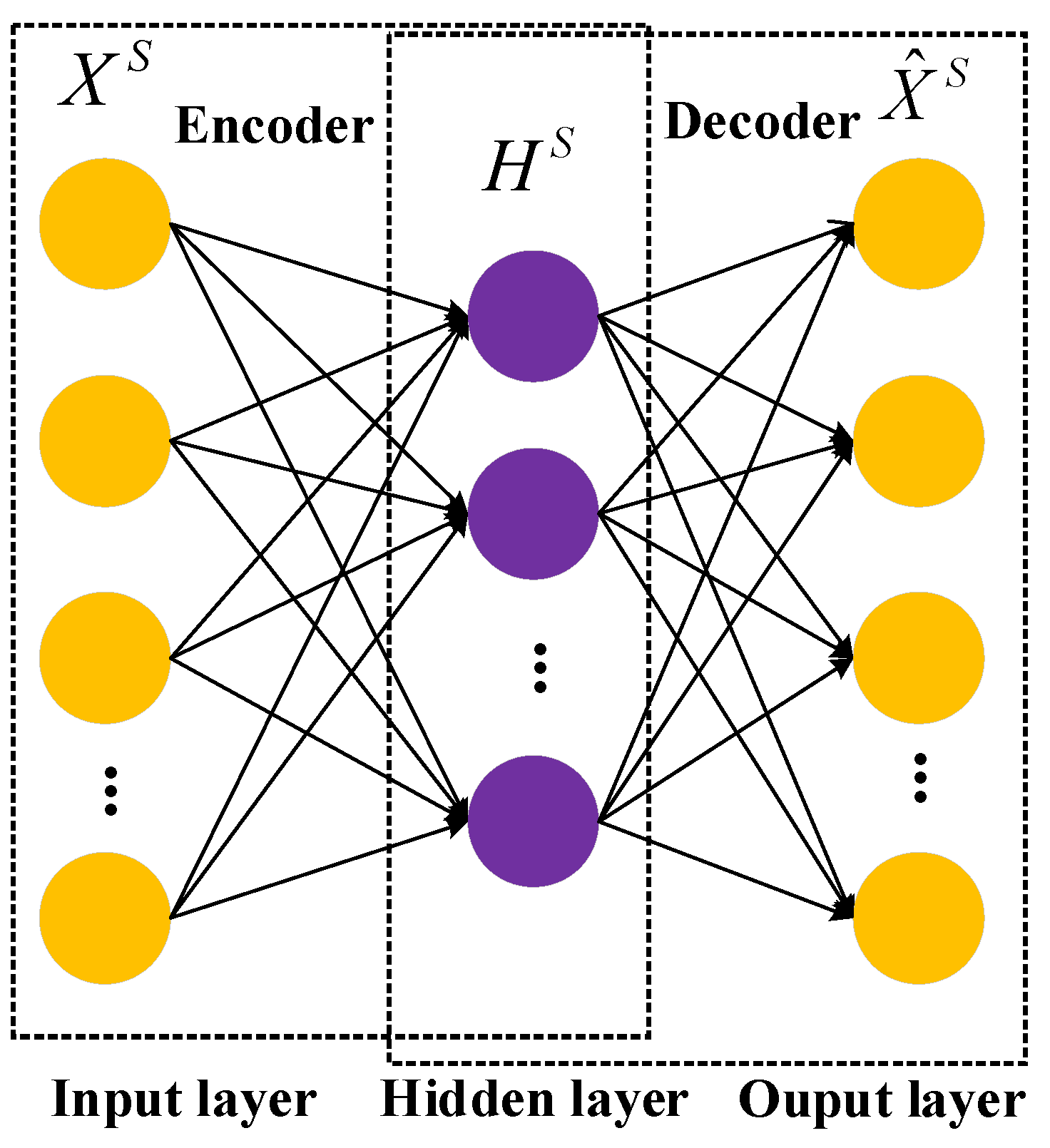
Autoencoder
3. Proposed Method
3.1. Fusion Model Architecture for Multisensor Signals
3.2. Implementation Process
3.2.1. Multisensor Feature Fusion
- (1)
- The vibration signal is collected from sensors of different directions, where is the sample length.
- (2)
- Take the data length as a sample and divide into , where is the number of samples.
- (3)
- Using the VMD to decompose , a number of IMF components of each sensor are obtained, and base on the decomposition results, the first few components already contain the main information of the raw signal [28], so in this paper, we take the modal number and decompose it to obtain .
- (4)
- Feature extraction is performed for IMF components, and 12 time-domain features and five frequency-domain features [29] are extracted for each IMF component. To further reflect the degree of self-similarity and complexity of vibration signals under different scale factors of the same time series, five multiscale entropy values are extracted for each IMF component, denoted as .
- (5)
- The raw feature multidomain set is formed by fusing the proposed features, denoted as , and further fusing the raw feature multidomain set of sensors in each direction to obtain .
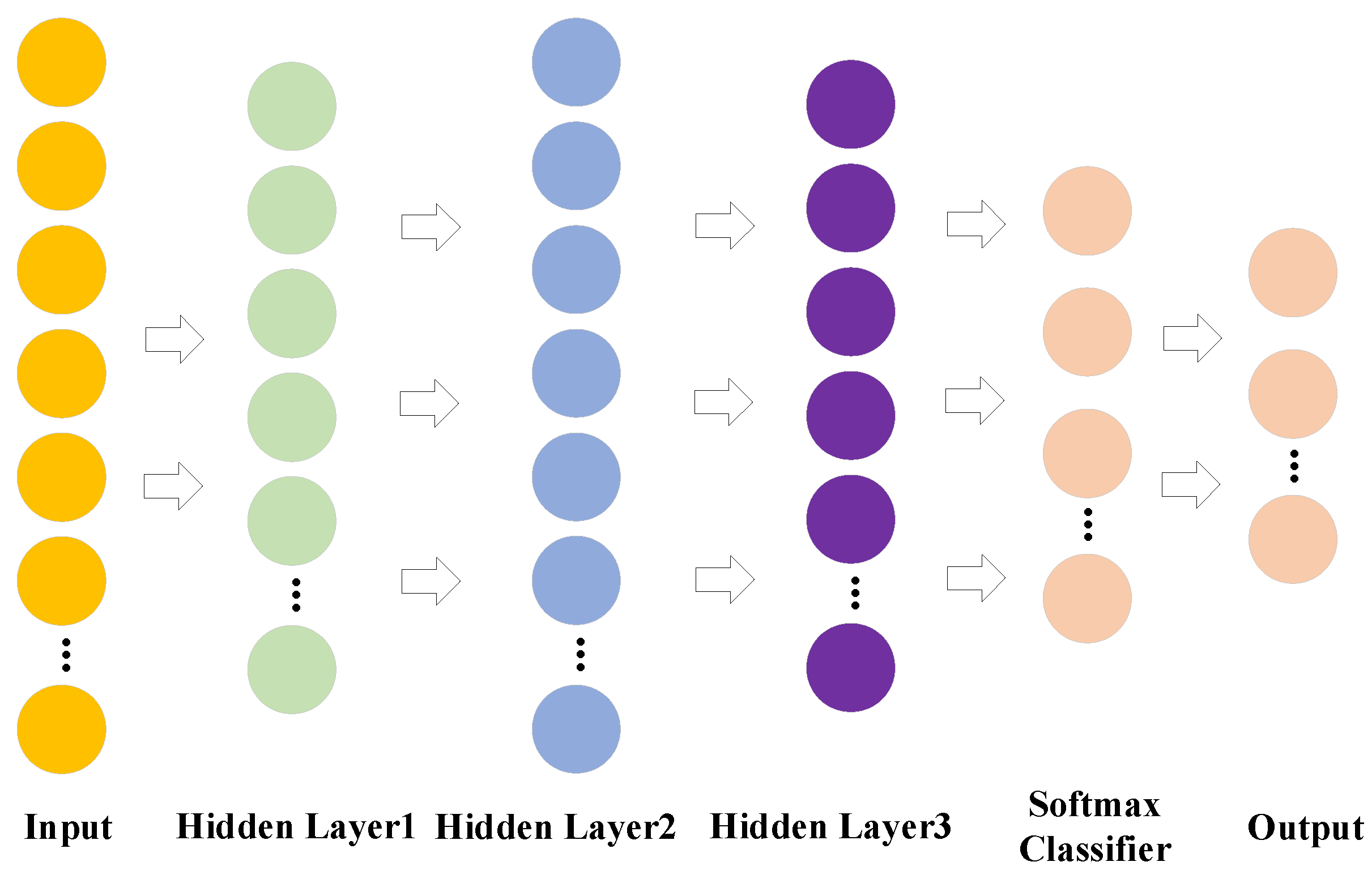
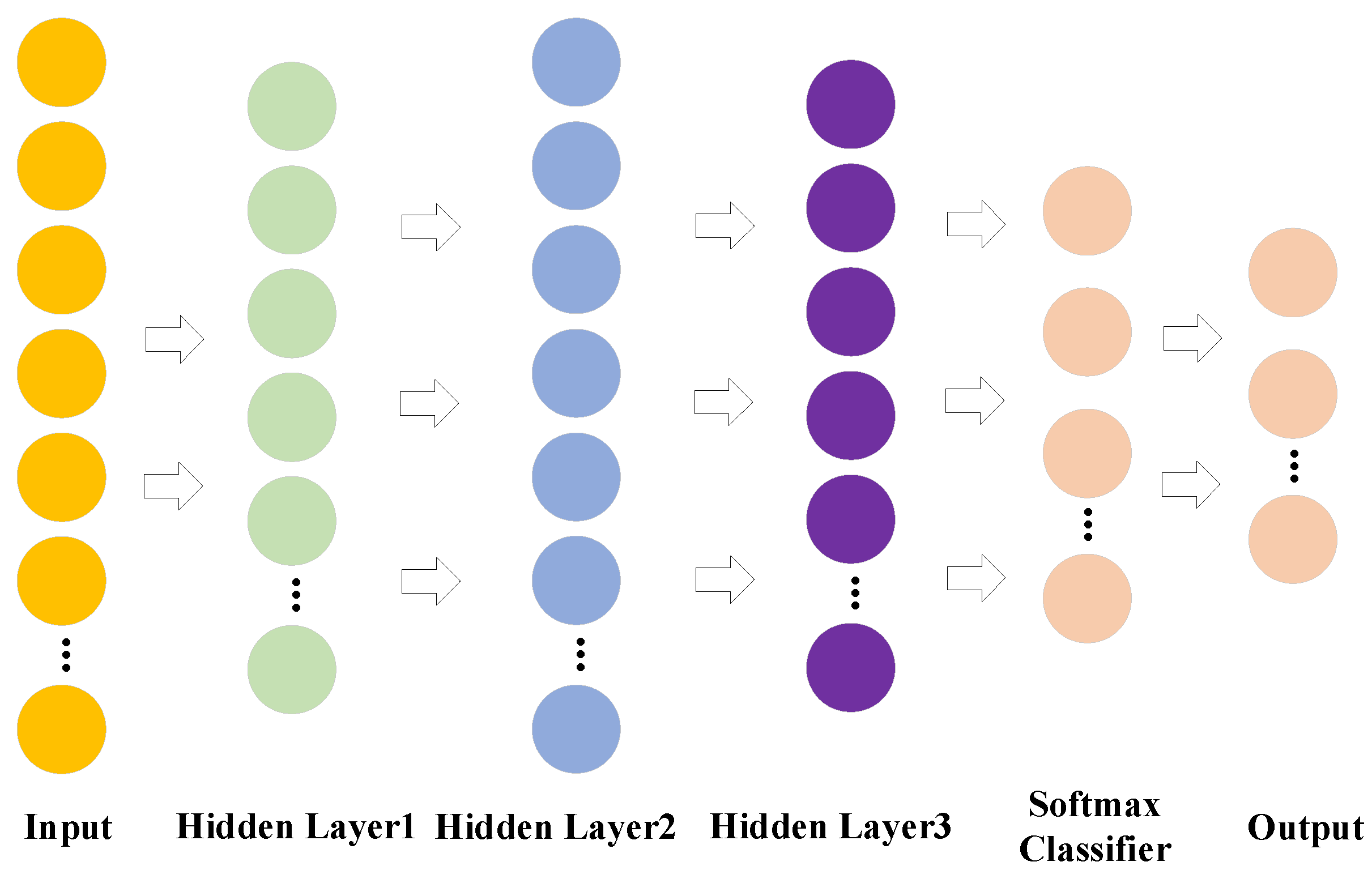
3.2.2. Deep Feature Learning and Classification
- (1)
- The first stage fused feature is used as the input of the DAEN;
- (2)
- Forward propagation. The hidden layer features of the first AE is used as the input of the second AE for unsupervised training until all hidden layers are trained;
- (3)
- The backpropagation (BP) algorithm [32] is used for supervised fine-tuning to further optimize all the weights and biases;
- (4)
- The last hidden layer feature, , of the DAEN is fed into the Softmax classifier;
- (5)
- The classification result is obtained.
3.3. Rolling Bearing Fault Diagnosis Process Based on the Proposed Method
- (1)
- Acquisition of rolling bearing vibration data from multiple sensors;
- (2)
- The vibration signal of each sensor is preprocessed with VMD, and the 22 features of the signal are extracted based on the preferred IMF;
- (3)
- The extracted feature is fused into multidomain feature dataset;
- (4)
- The multidomain feature dataset is divided into either a training dataset or a testing dataset, according to the set ratio;
- (5)
- The DAEN model is constructed. The parameters of the DAEN model are initialized, the training dataset is taken as the input to the model and the model loss function is minimized;
- (6)
- The test dataset is fed into the trained DAEN model to obtain the test accuracy.
4. Experiment
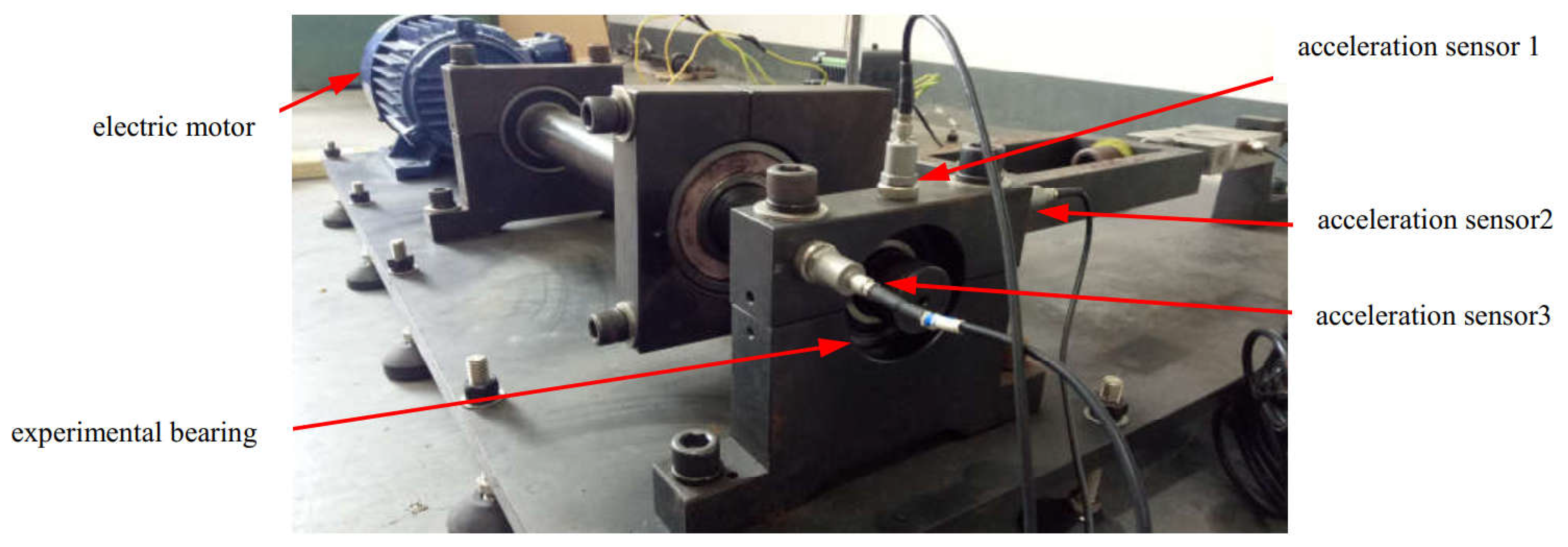
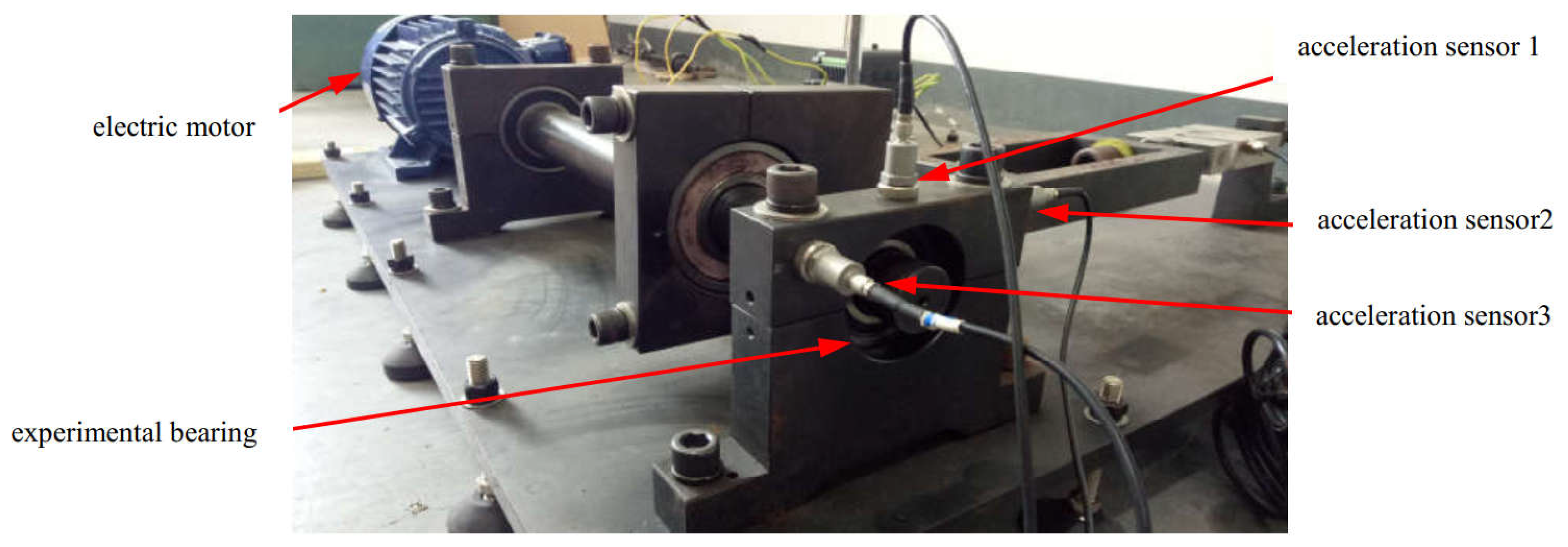
4.1. Rolling Bearing Test Bench
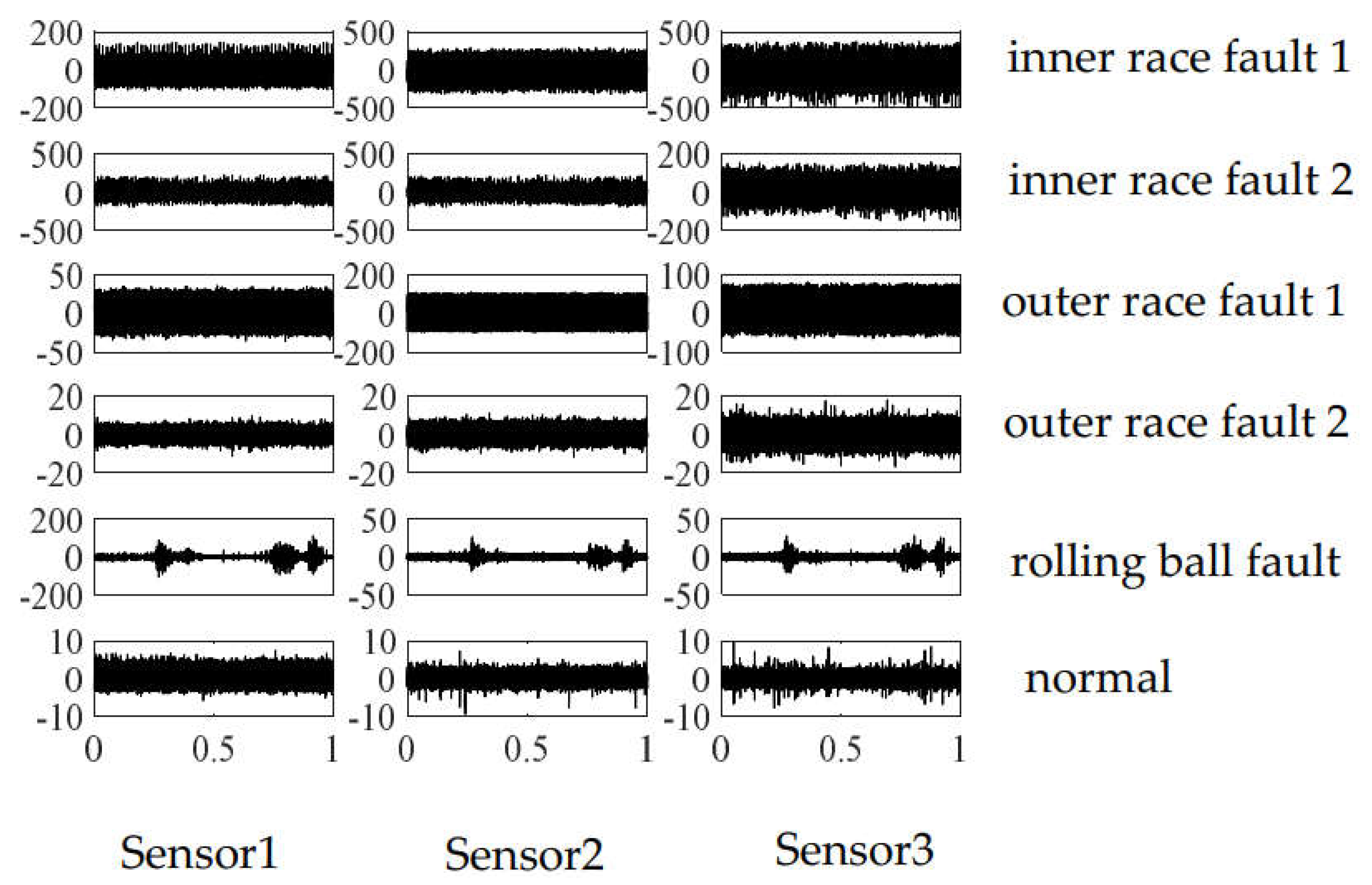
4.2. Rolling Bearing Multisensor Signals
4.3. Dataset Construction
4.4. Comparative Experiments and Analysis of Results
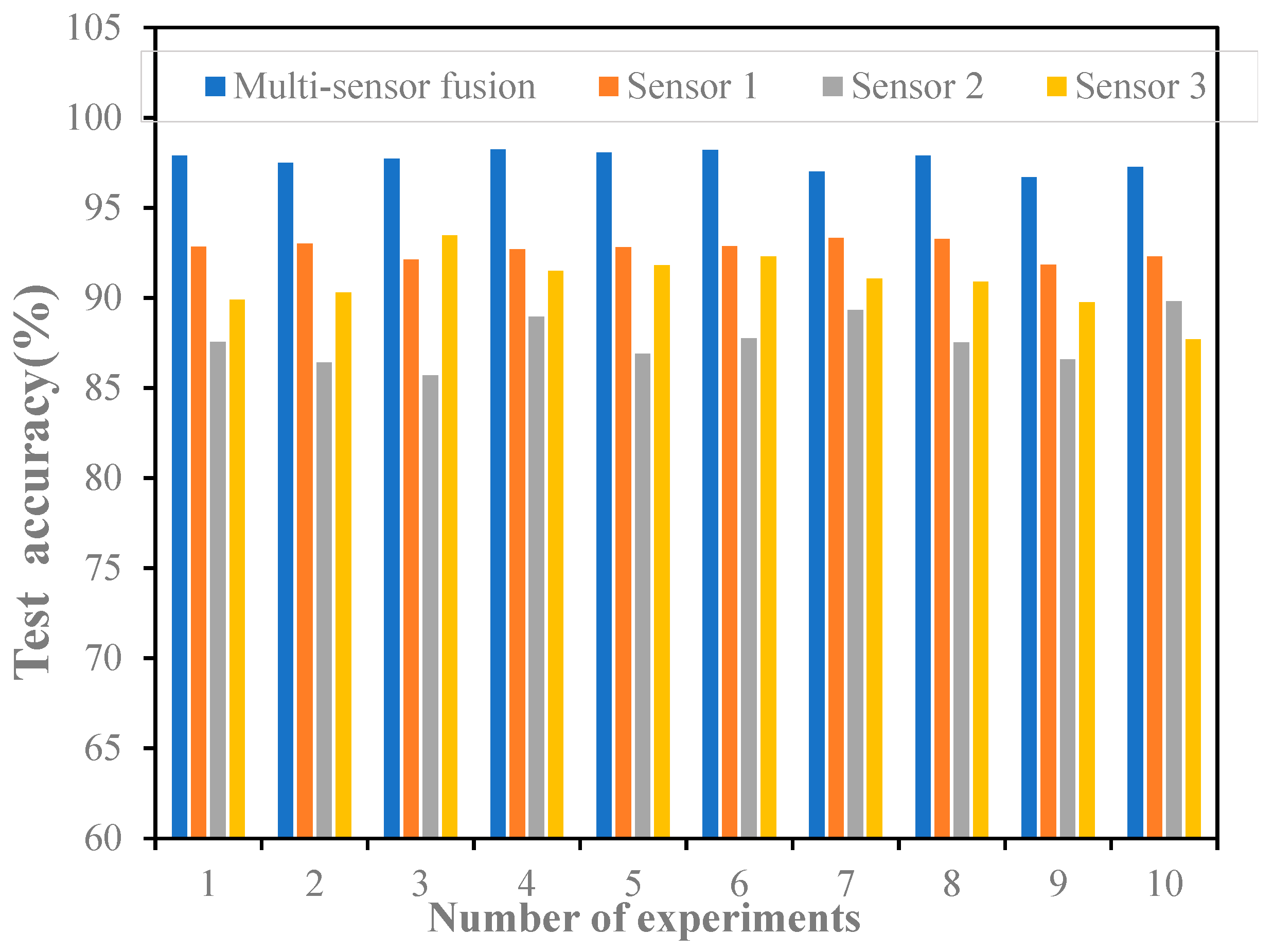
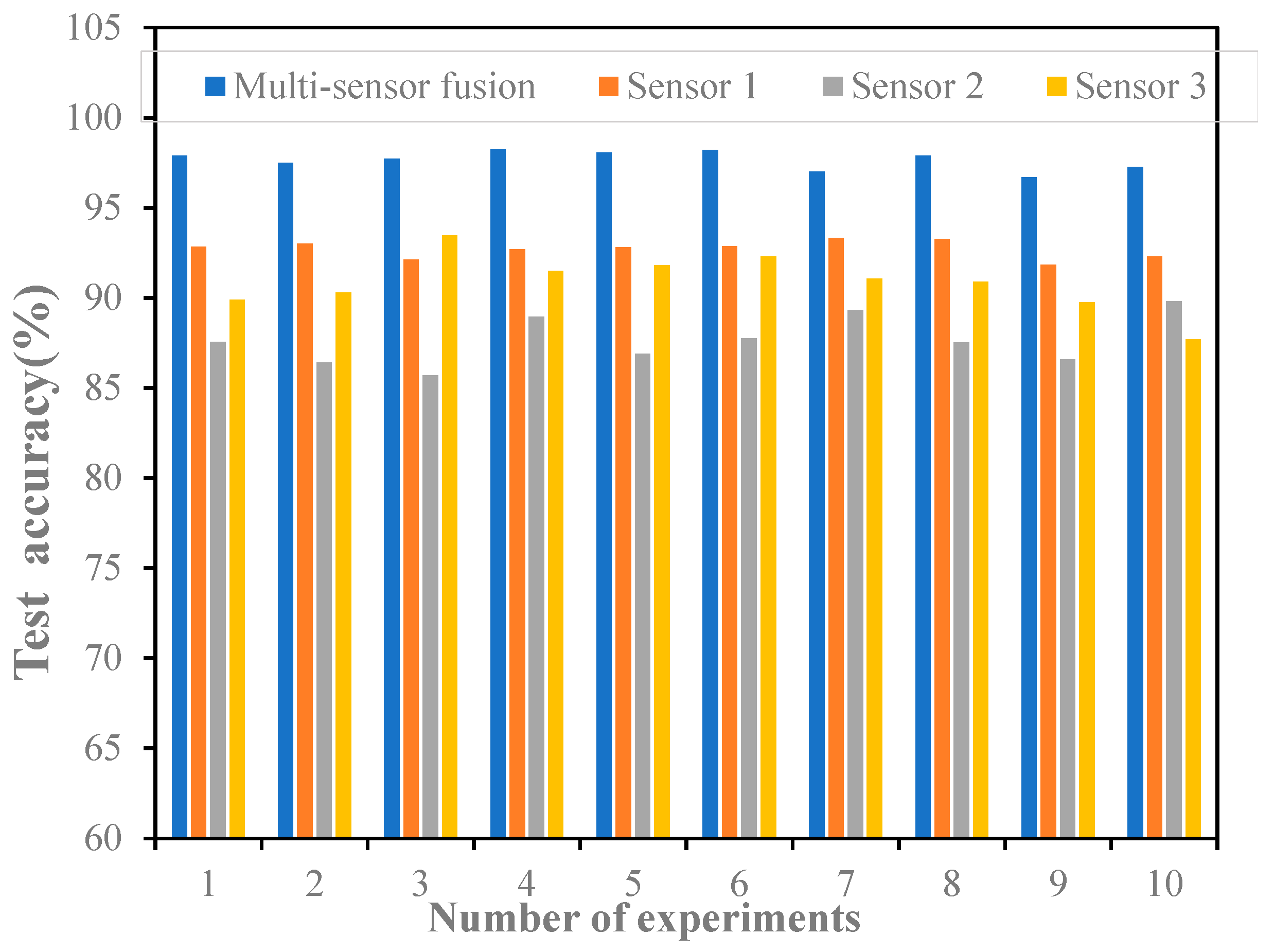
4.4.1. The Feasibility and Effectiveness of Multisensor Collaborative Diagnosis
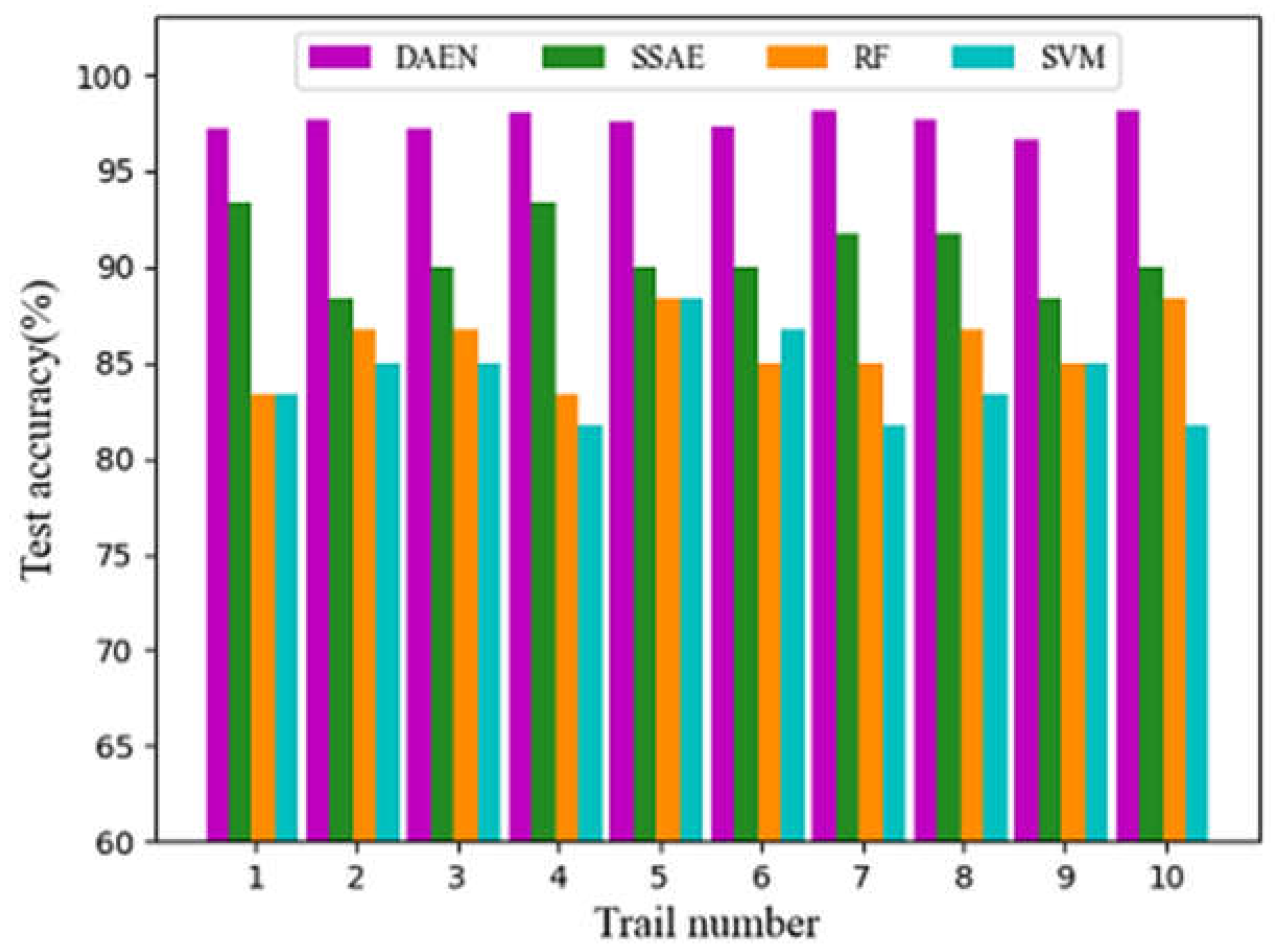
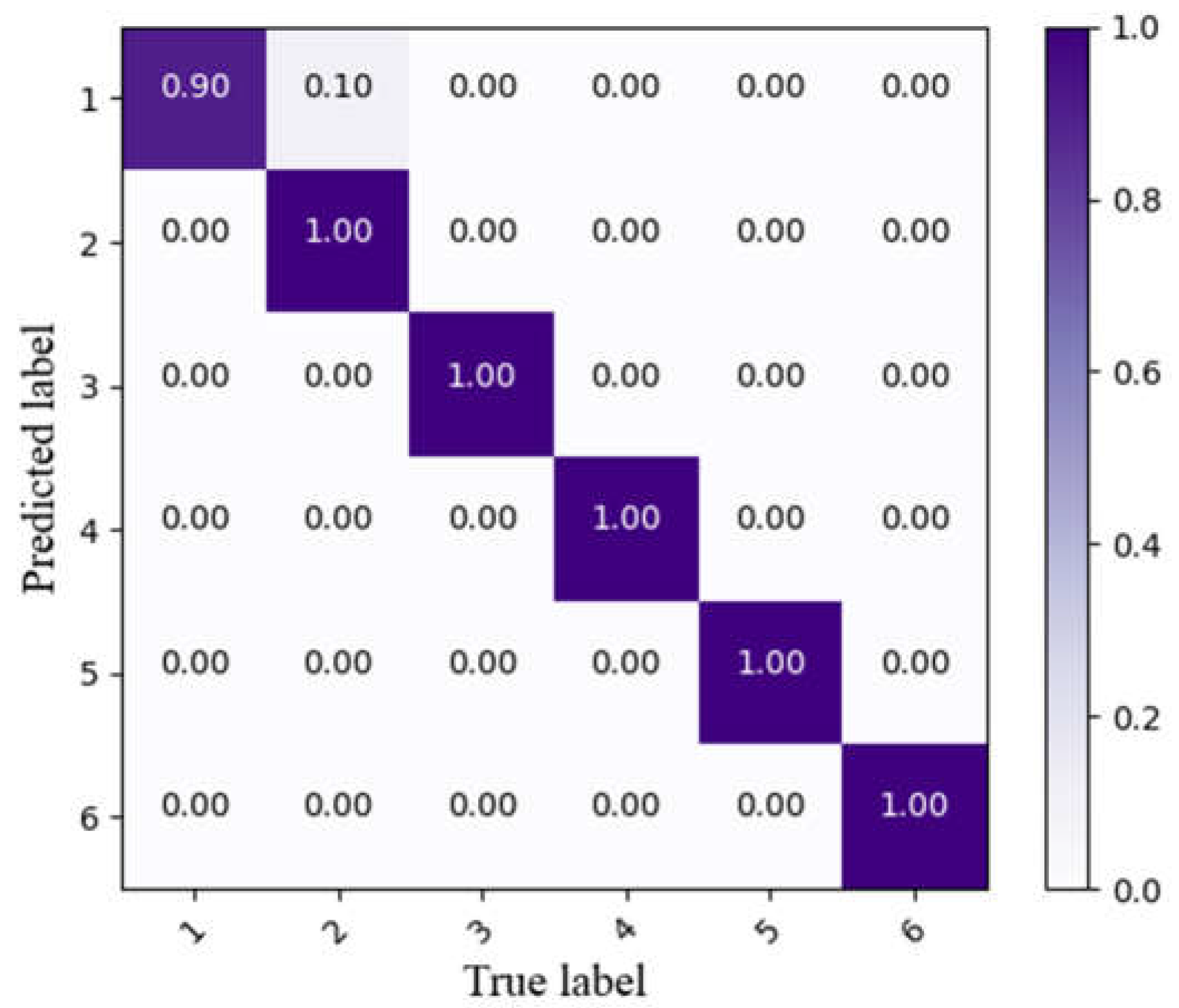
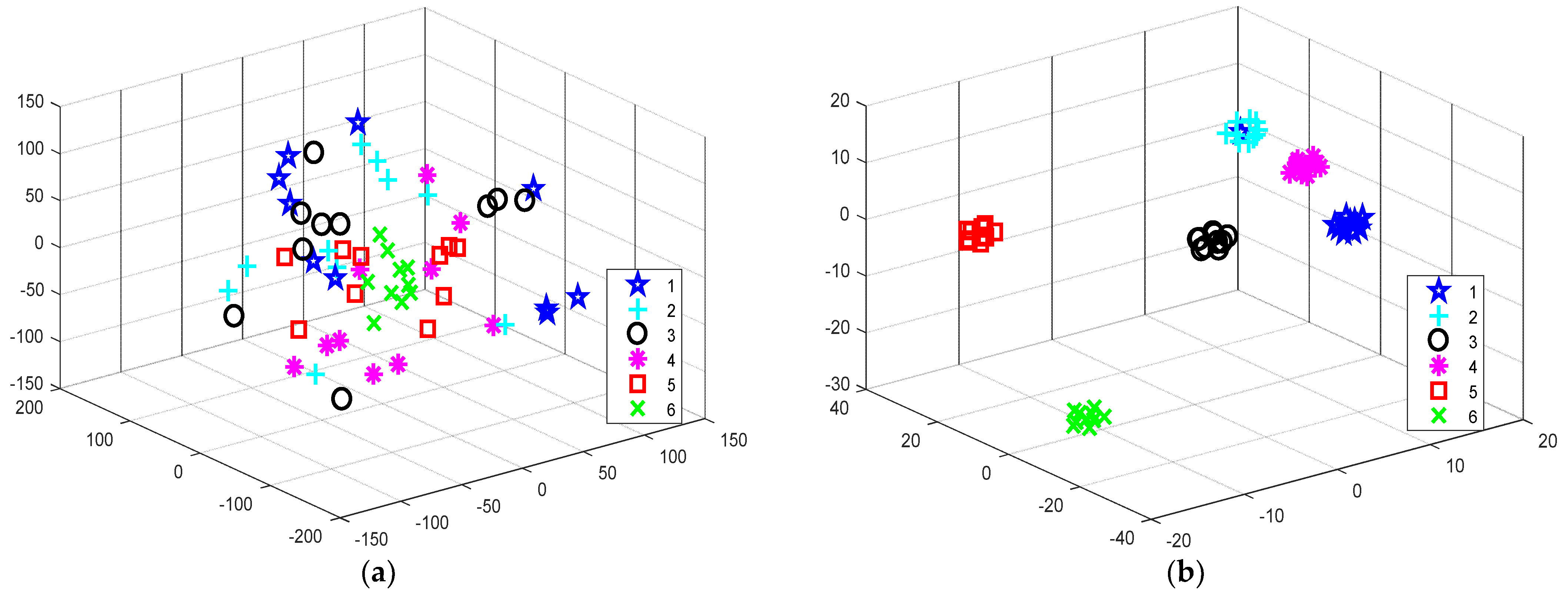
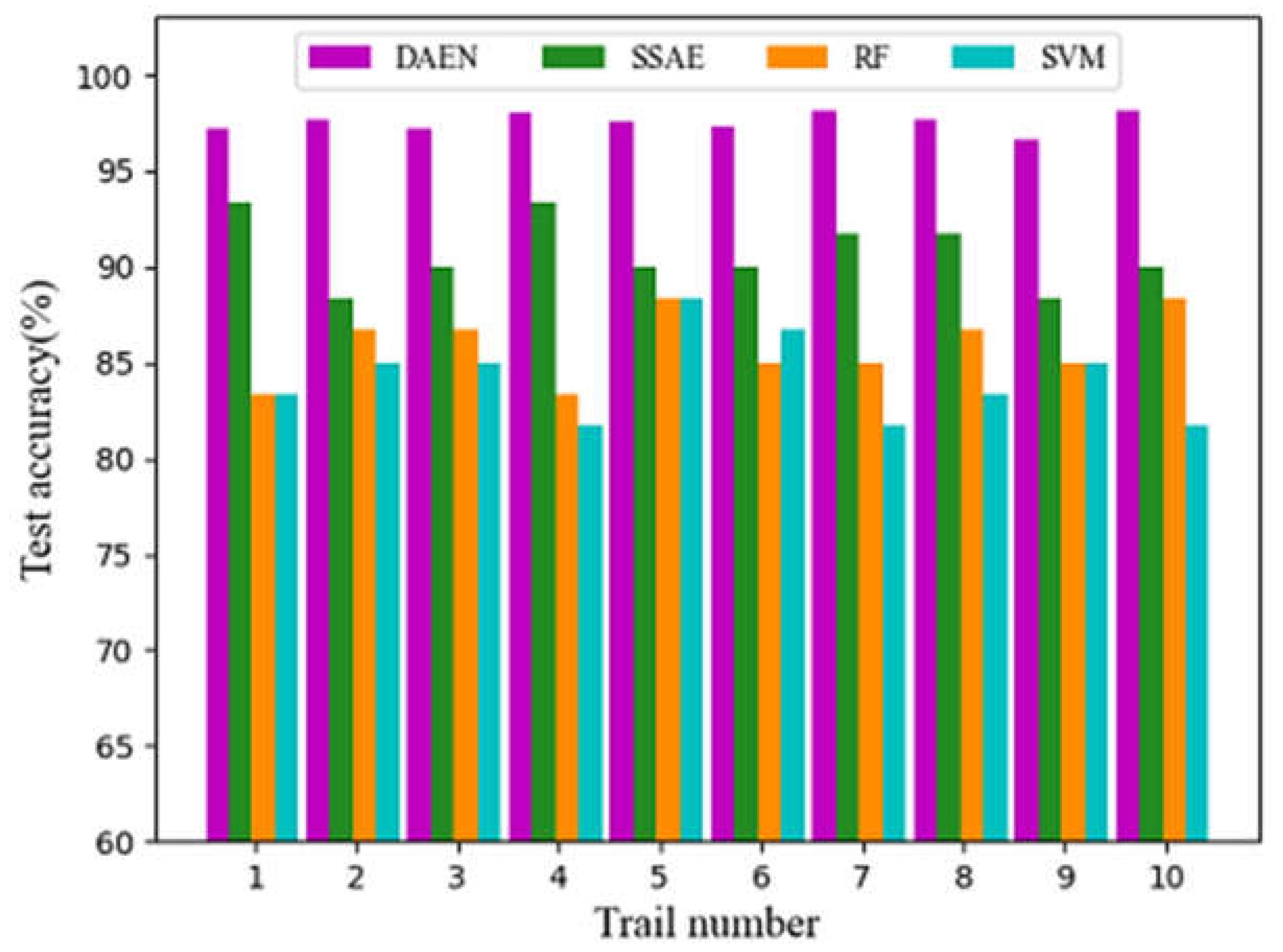
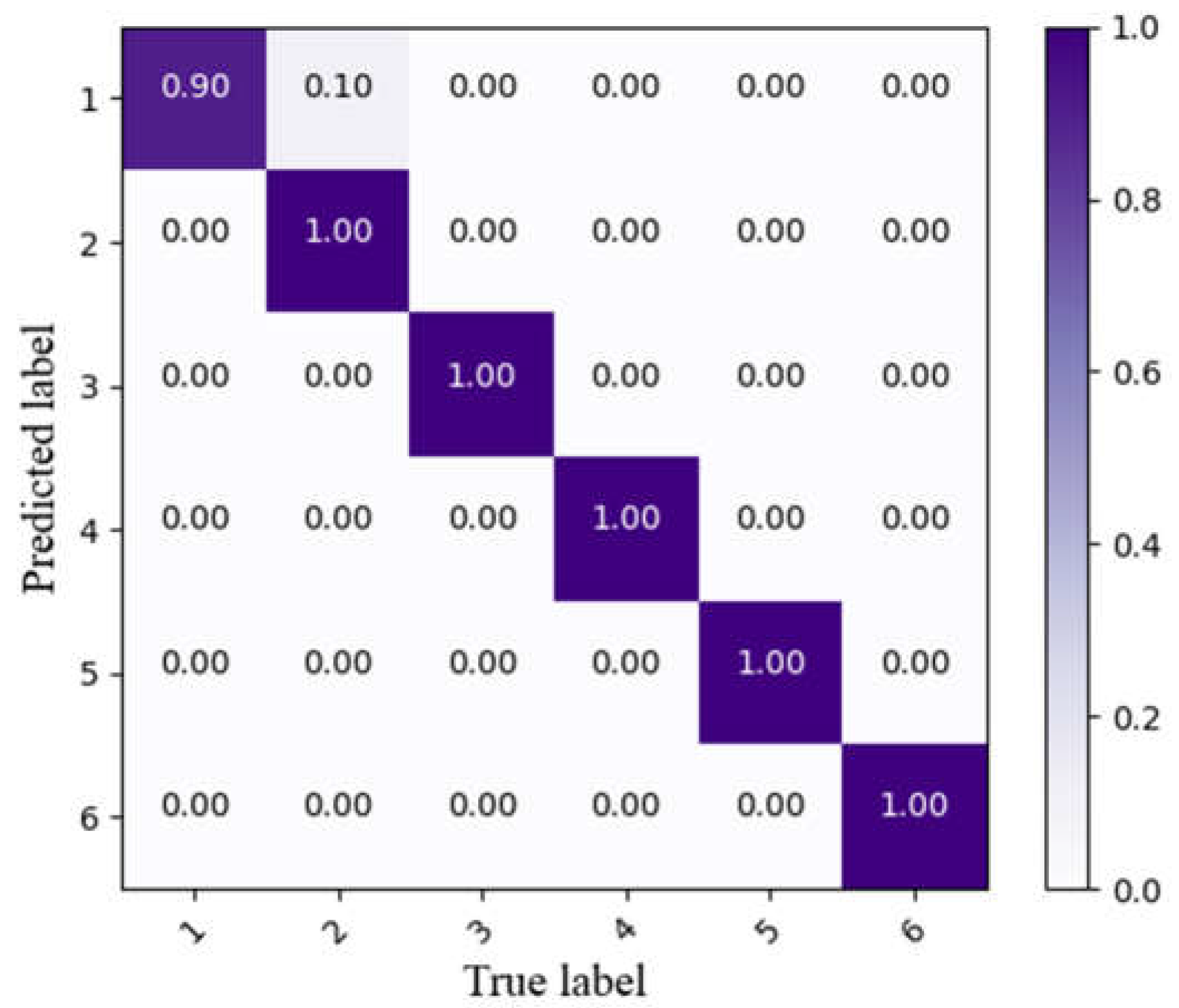
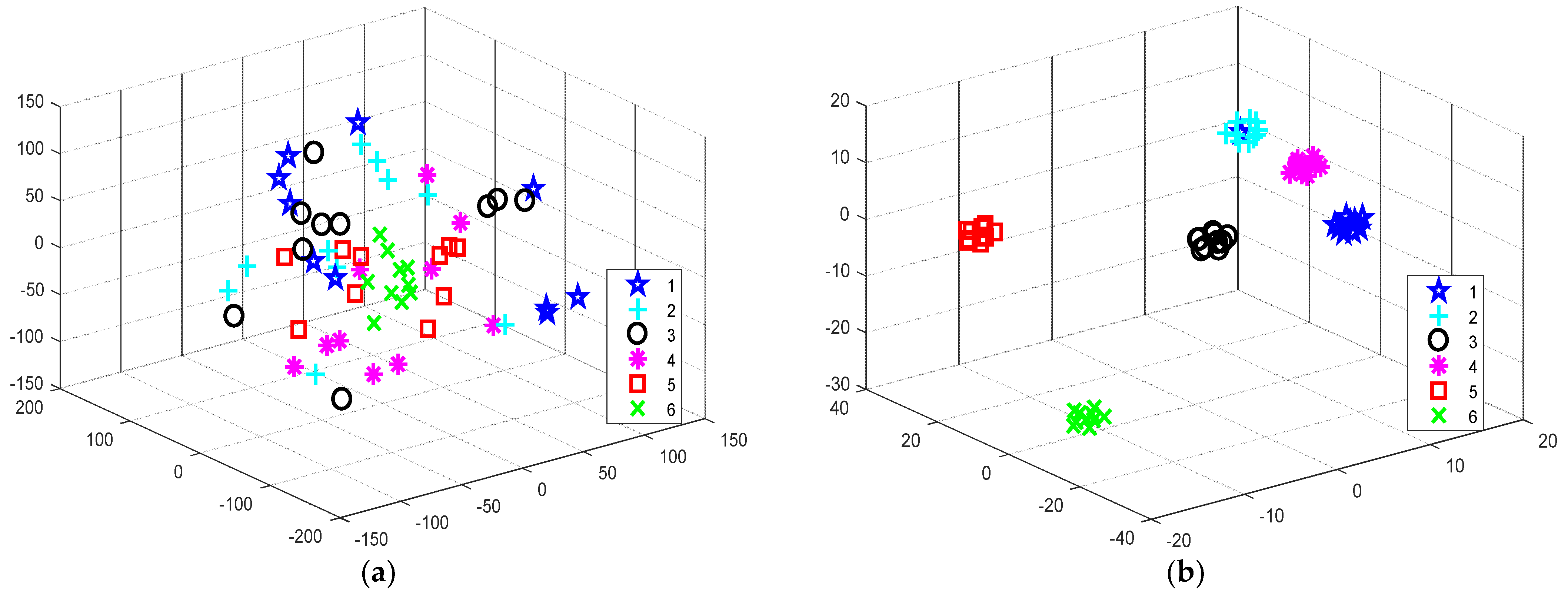
4.4.2. Verification of the Superiority of the Proposed Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Shen, C.; Xia, M.; Wang, D.; Zhu, J.; Zhu, Z. Multi-scale deep intra-class transfer learning for bearing fault diagnosis. Reliab. Eng. Syst. Saf. 2020, 202, 107050. [Google Scholar] [CrossRef]
- Al-Bugharbee, H.; Trendafilova, I. A fault diagnosis methodology for rolling element bearings based on advanced signal pretreatment and autoregressive modeling. J. Sound Vib. 2016, 369, 246–265. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Processing 2017, 100, 439–453. [Google Scholar] [CrossRef]
- Hu, Z.; Han, T.; Bian, J.; Wang, Z.; Chen, L.; Zhang, W.; Kong, X. A deep feature extraction approach for bearing fault diagnosis based on multi-scale convolutional autoencoder and generative adversarial networks. Meas. Sci. Technol. 2022, 33, 065013. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Li, X.; Wu, S. Intelligent fault diagnosis of rolling bearing using deep wavelet auto-encoder with extreme learning machine. Knowl. Based Syst. 2018, 140, 1–14. [Google Scholar]
- Shao, H.; Lin, J.; Zhang, L.; Galar, D.; Kumar, U. A novel approach of multisensory fusion to collaborative fault diagnosis in maintenance. Inf. Fusion 2021, 74, 65–76. [Google Scholar] [CrossRef]
- Shan, P.; Lv, H.; Yu, L.; Ge, H.; Li, Y.; Gu, L. A multisensor data fusion method for ball screw fault diagnosis based on convolutional neural network with selected channels. IEEE Sens. J. 2020, 20, 7896–7905. [Google Scholar] [CrossRef]
- Bigdeli, B.; Pahlavani, P.; Amirkolaee, H.A. An ensemble deep learning method as data fusion system for remote sensing multisensor classification. Appl. Soft Comput. 2021, 110, 107563. [Google Scholar] [CrossRef]
- Wang, C.; Xin, C.; Xu, Z.; Qin, M.; He, M. Mix-VAEs: A novel multisensor information fusion model for intelligent fault diagnosis. Neurocomputing 2022, 492, 234–244. [Google Scholar] [CrossRef]
- Chen, Z.; Li, W. Multisensor feature fusion for bearing fault diagnosis using sparse autoencoder and deep belief network. IEEE Trans. Instrum. Meas. 2017, 66, 1693–1702. [Google Scholar] [CrossRef]
- Shi, J.; Yi, J.; Ren, Y.; Li, Y.; Zhong, Q.; Tang, H.; Chen, L. Fault diagnosis in a hydraulic directional valve using a two-stage multi-sensor information fusion. Measurement 2021, 179, 109460. [Google Scholar] [CrossRef]
- Wang, X.; Lu, S.; Chen, K.; Wang, Q.; Zhang, S. Bearing fault diagnosis of switched reluctance motor in electric vehicle powertrain via multi-sensor data fusion. IEEE Trans. Ind. Inform. 2022, 18, 2452–2464. [Google Scholar] [CrossRef]
- Yu, J. Mechatronics fault prediction and diagnosis based on multi sensor information fusion. J. Phys. Conf. Ser. 2021, 1982, 012100. [Google Scholar] [CrossRef]
- Wang, D.; Li, Y.; Jia, L.; Song, Y.; Liu, Y. Novel three-stage feature fusion method of multimodal data for bearing fault diagnosis. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Jing, L.; Wang, T.; Zhao, M.; Wang, P. An adaptive multi-sensor data fusion method based on deep convolutional neural networks for fault diagnosis of planetary gearbox. Sensors 2017, 17, 414. [Google Scholar] [CrossRef] [Green Version]
- Huang, M.; Liu, Z.; Tao, Y. Mechanical fault diagnosis and prediction in IoT based on multi-source sensing data fusion. Simul. Model. Pract. Theory 2019, 102, 101981. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, C.; Wang, R.; Qian, J. A novel fault diagnosis method based on multi-level information fusion and hierarchical adaptive convolutional neural networks for centrifugal blowers. Measurement 2021, 185, 109970. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Wang, F.; Zhao, H. An enhancement deep feature fusion method for rotating machinery fault diagnosis. Knowl.-Based Syst. 2017, 119, 200–220. [Google Scholar] [CrossRef]
- Li, X.; Zhong, X.; Shao, H.; Han, T.; Shen, C. Multi-sensor gearbox fault diagnosis by using feature-fusion covariance matrix and multi-Riemannian kernel ridge regression. Reliab. Eng. Syst. Saf. 2021, 216, 108018. [Google Scholar] [CrossRef]
- Wang, N.; Li, H.; Wu, F.; Zhang, R.; Gao, F. Fault diagnosis of complex chemical processes using feature fusion of a convolutional network. Ind. Eng. Chem. Res. 2021, 60, 2232–2248. [Google Scholar] [CrossRef]
- Jiang, Q.; Shen, Y.; Li, H.; Xu, F. New fault recognition method for rotary machinery based on information entropy and a probabilistic neural network. Sensors 2018, 18, 337. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Z.; Han, H.; Cui, X.; Fan, Y. Novel application of multi-model ensemble learning for fault diagnosis in refrigeration systems. Appl. Therm. Eng. 2020, 164, 114516. [Google Scholar] [CrossRef]
- Quan, H.; Li, J.; Peng, D. Multisensor fault diagnosis based on data fusion using D-S theory. In Proceedings of the 33rd Chinese Control Conference (CCC), Nanjing, China, 28 July 2014; IEEE: New York, NY, USA, 2014. [Google Scholar]
- Li, X.; Jiang, H.; Niu, M.; Wang, R. An enhanced selective ensemble deep learning method for rolling bearing fault diagnosis with beetle antennae search algorithm. Mech. Syst. Signal Processing 2020, 142, 106752. [Google Scholar] [CrossRef]
- Basir, O.; Yuan, X. Engine fault diagnosis based on multi-sensor information fusion using Dempster–Shafer evidence theory. Inf. Fusion 2007, 8, 379–386. [Google Scholar] [CrossRef]
- Zhao, K.; Sun, R.; Li, L.; Hou, M.; Yuan, G.; Sun, R. An improved evidence fusion algorithm in multi-sensor systems. Appl. Intell. 2021, 51, 7614–7624. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Processing 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Dibaj, A.; Ettefagh, M.M.; Hassannejad, R.; Ehghaghi, M.B. A hybrid fine-tuned VMD and CNN scheme for untrained compound fault diagnosis of rotating machinery with unequal-severity faults. Expert Syst. Appl. 2021, 167, 114094. [Google Scholar] [CrossRef]
- Tong, J.; Luo, J.; Pan, H.; Zheng, J.; Zhang, Q. A Novel Cuckoo Search Optimized Deep Auto-Encoder Network-Based Fault Diagnosis Method for Rolling Bearing. Shock. Vib. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Shao, H.; Xia, M.; Wan, J.; de Silva, C.W. Modified stacked auto-encoder using adaptive morlet wavelet for intelligent fault diagnosis of rotating machinery. IEEE/ASME Trans. Mechatron. 2021, 27, 24–33. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhao, H.; Wang, F. A novel deep autoencoder feature learning method for rotating machinery fault diagnosis. Mech. Syst. Signal Processing 2017, 95, 187–204. [Google Scholar] [CrossRef]
- Tanjung, J.P. Classification of wheat seeds using neural network backpropagation algorithm. J. Inform. Telecommun. Eng. 2021, 4, 335–342. [Google Scholar] [CrossRef]
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | Fault Depth/mm | Size of Training Dataset | Size of Testing Dataset | Label |
|---|---|---|---|---|
| Inner race fault 1 | 0.3 | 90 | 10 | 1 |
| Inner race fault 2 | 0.4 | 90 | 10 | 2 |
| Outer race fault 1 | 0.2 | 90 | 10 | 3 |
| Outer race fault 2 | 0.3 | 90 | 10 | 4 |
| Rolling ball fault | 0.2 | 90 | 10 | 5 |
| Normal | 0 | 90 | 10 | 6 |
| Method | Average Test Accuracy (%) | Standard Deviation |
|---|---|---|
| Multisensor fusion (The proposed method) | 97.55 | 0.485 |
| Senor 1 | 93.12 | 0.589 |
| Senor 2 | 87.45 | 1.418 |
| Senor 3 | 91.28 | 1.803 |
| Method | Average Test Accuracy(%) | Standard Deviation |
|---|---|---|
| The proposed method | 97.55 | 0.485 |
| SSAE | 90.67 | 1.792 |
| RF | 85.83 | 1.801 |
| SVM | 84.16 | 2.255 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tong, J.; Liu, C.; Pan, H.; Zheng, J. Multisensor Feature Fusion Based Rolling Bearing Fault Diagnosis Method. Coatings 2022, 12, 866. https://doi.org/10.3390/coatings12060866
Tong J, Liu C, Pan H, Zheng J. Multisensor Feature Fusion Based Rolling Bearing Fault Diagnosis Method. Coatings. 2022; 12(6):866. https://doi.org/10.3390/coatings12060866
Chicago/Turabian StyleTong, Jinyu, Cang Liu, Haiyang Pan, and Jinde Zheng. 2022. "Multisensor Feature Fusion Based Rolling Bearing Fault Diagnosis Method" Coatings 12, no. 6: 866. https://doi.org/10.3390/coatings12060866
APA StyleTong, J., Liu, C., Pan, H., & Zheng, J. (2022). Multisensor Feature Fusion Based Rolling Bearing Fault Diagnosis Method. Coatings, 12(6), 866. https://doi.org/10.3390/coatings12060866