Wearable Sensors Based on Miniaturized High-Performance Hybrid Nanogenerator for Medical Health Monitoring


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Device Information
2.2. Fabrication of MHP-HNG
3. Results and Discussion
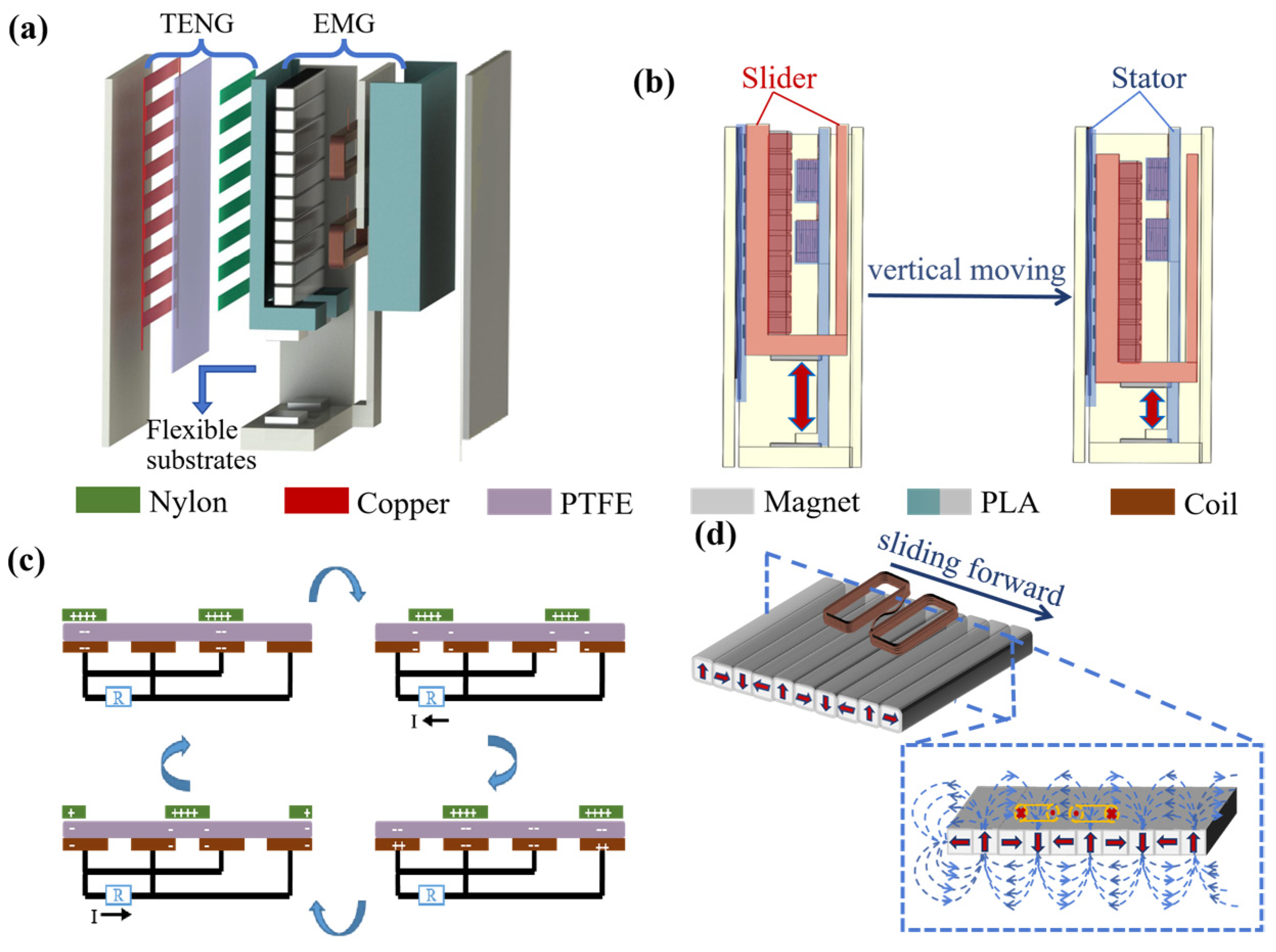
3.1. Structure and Working Principle of MHP-HNG
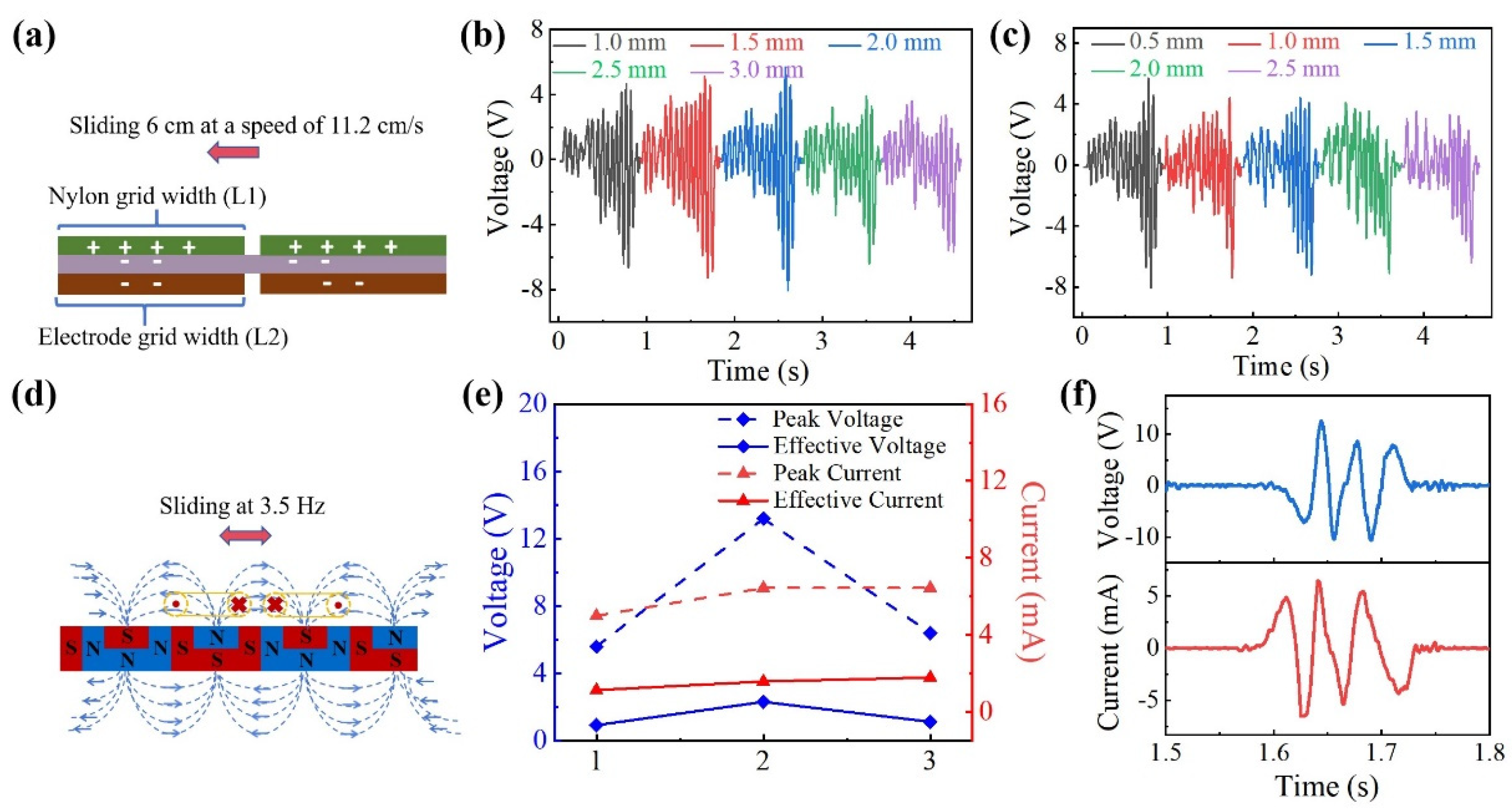
3.2. Optimization of MHP-HNG
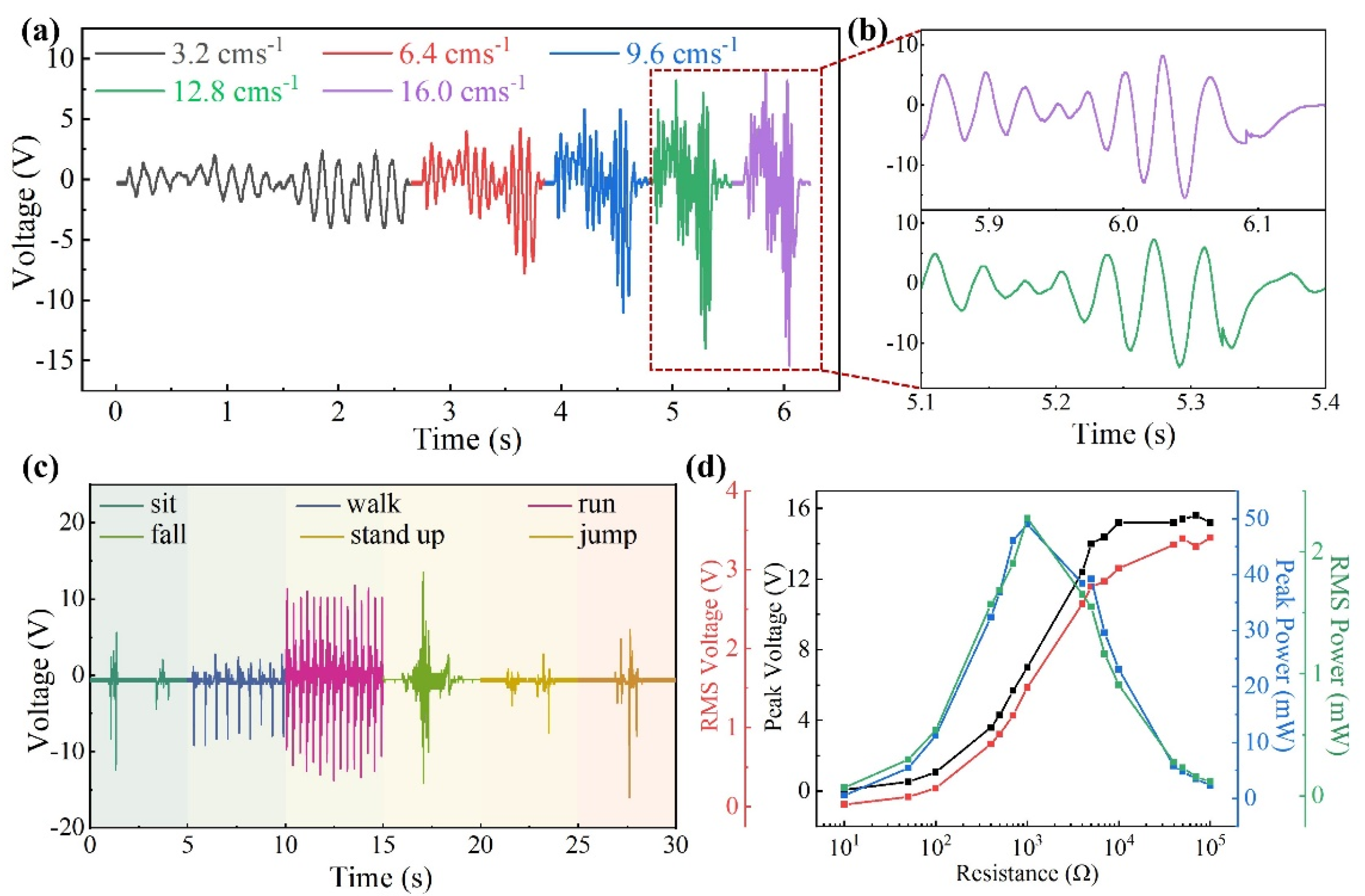
3.3. Performance of MHP-HNG
3.4. Application of MHP-HNG
3.4.1. Application of Self-Powered Wireless Optical Communication Sensing System
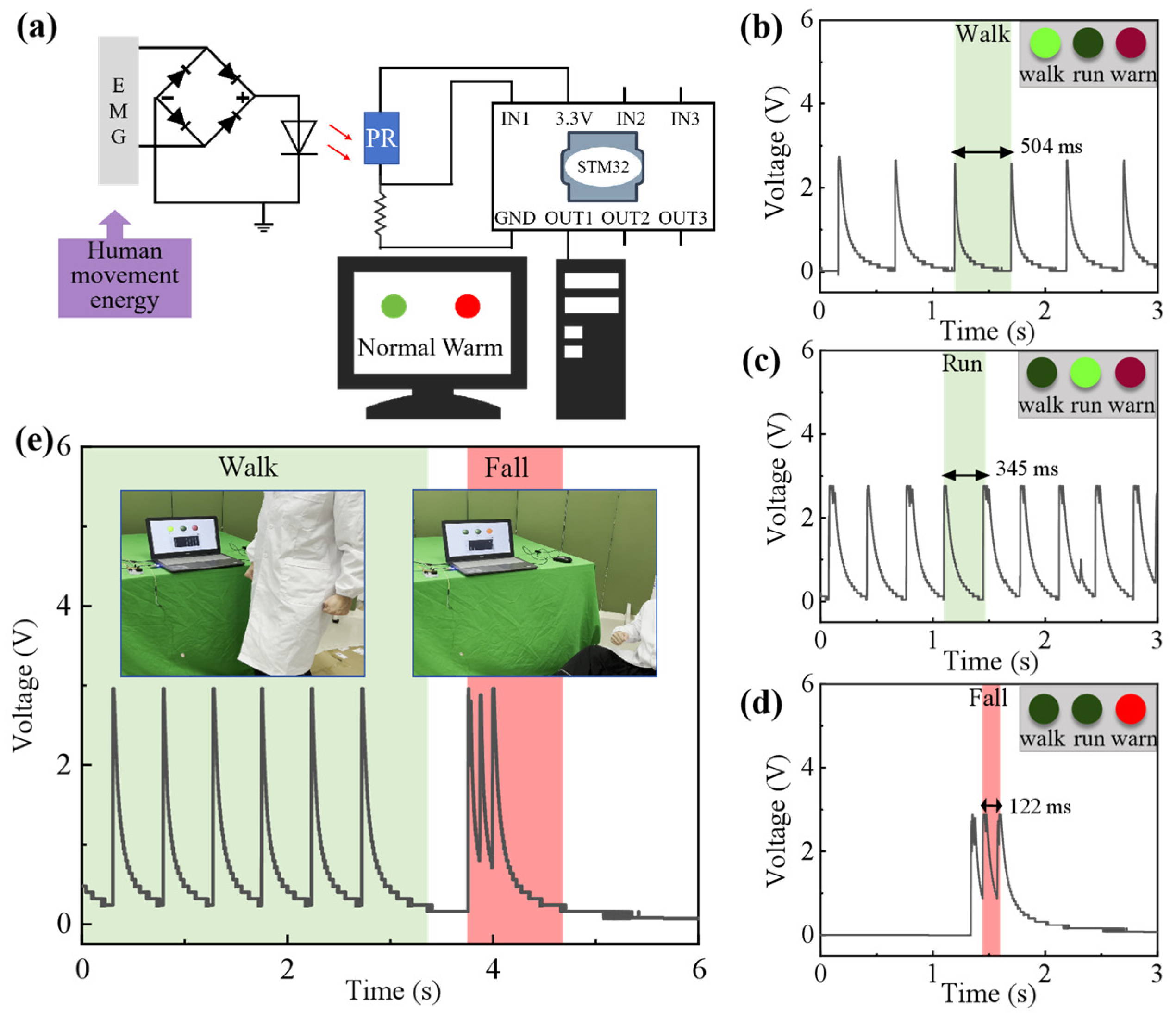
3.4.2. Application of Self-Powered Wireless Communication Sensing System
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, Z.Y.; Zhang, B.B.; Zou, H.Y.; Lin, Z.M.; Liu, G.L.; Wang, Z.L. Multifunctional Sensor Based on Translational-Rotary Triboelectric Nanogenerator. Adv. Energy Mater. 2019, 9, 1901124. [Google Scholar] [CrossRef]
- Maharjan, P.; Bhatta, T.; Salauddin Rasel, M.; Salauddin, M.; Toyabur Rahman, M.; Park, J.Y. High-Performance Cycloid Inspired Wearable Electromagnetic Energy Harvester for Scavenging Human Motion Energy. Appl. Energy 2019, 26, 4370–4376. [Google Scholar] [CrossRef]
- Mahmud, M.A.P.; Huda, N.; Farjana, S.H.; Asadnia, M.; Lang, C. Recent Advances in Nanogenerator-Driven Self-Powered Implantable Biomedical Devices. Adv. Energy Mater. 2018, 8, 1701210. [Google Scholar] [CrossRef]
- Tan, P.C.; Zheng, Q.; Zou, Y.; Shi, B.J.; Jiang, D.J.; Qu, X.; Ouyang, H.; Zhao, C.; Cao, Y.; Fan, Y.; et al. A Battery-Like Self-Charge Universal Module for Motional Energy Harvest. Adv. Energy Mater. 2019, 9, 1901875. [Google Scholar] [CrossRef]
- Gao, Y.; Yu, L.; Yeo, J.C.; Lim, C.T. Flexible Hybrid Sensors for Health Monitoring: Materials and Mechanisms to Render Wearability. Adv. Mater. 2020, 32, e1902133. [Google Scholar] [PubMed]
- Liu, F.; Liu, K.; Rafique, S.; Xu, Z.; Niu, W.; Li, X.; Wang, Y.; Deng, L.; Wang, J.; Yue, X.; et al. Highly Efficient and Stable Self-Powered Mixed Tin-Lead Perovskite Photodetector Used in Remote Wearable Health Monitoring Technology. Adv. Sci. 2023, 10, e2205879. [Google Scholar] [CrossRef]
- World Health Organization. Who Guidelines Approved by the Guidelines Review Committee. In Integrated Care for Older People: Guidelines on Community-Level Interventions to Manage Declines in Intrinsic Capacity; World Health Organization: Geneva, Switzerland, 2017. [Google Scholar]
- Chan, L.L.Y.; Arbona, C.H.; Brodie, M.A.; Lord, S.R. Prediction of Injurious Falls in Older Adults Using Digital Gait Biomarkers Extracted from Large-Scale Wrist Sensor Data. Age Ageing 2023, 52, afad179. [Google Scholar] [PubMed]
- Warmerdam, E.; Hausdorff, J.M.; Atrsaei, A.; Zhou, Y.; Mirelman, A.; Aminian, K.; Espay, A.J.; Hansen, C.; Evers, L.J.; Keller, A.; et al. Long-Term Unsupervised Mobility Assessment in Movement Disorders. Lancet Neurol. 2020, 19, 462–470. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Sun, C.; Guo, Z.; Xia, X.; Jiang, Q.; Ye, X.; Shang, J.; Zhang, Y.; Zhu, X.; Li, R.W. Near-Sensor Reservoir Computing for Gait Recognition Via a Multi-Gate Electrolyte-Gated Transistor. Adv. Sci. 2023, 10, e2300471. [Google Scholar] [CrossRef]
- Zhu, Z.; Estevez, D.; Feng, T.; Chen, Y.; Li, Y.; Wei, H.; Wang, Y.; Wang, Y.; Zhao, L.; Jawed, S.A.; et al. A Novel Induction-Type Pressure Sensor Based on Magneto-Stress Impedance and Magnetoelastic Coupling Effect for Monitoring Hand Rehabilitation. Small 2024, e2400797. [Google Scholar] [CrossRef]
- Wang, C.; Lai, S.K.; Wang, Z.C.; Wang, J.M.; Yang, W.Q.; Ni, Y.Q. A Low-Frequency, Broadband and Tri-Hybrid Energy Harvester with Septuple-Stable Nonlinearity-Enhanced Mechanical Frequency Up-Conversion Mechanism for Powering Portable Electronics. Nano Energy 2019, 64, 103943. [Google Scholar] [CrossRef]
- He, J.; Fan, X.M.; Zhao, D.Y.; Cui, M.; Han, B.; Hou, X.; Chou, X. A High-Efficient Triboelectric-Electromagnetic Hybrid Nanogenerator for Vibration Energy Harvesting and Wireless Monitoring. Sci. China Inf. Sci. 2022, 65, 142401. [Google Scholar] [CrossRef]
- Salauddin, M.; Rasel, M.S.; Kim, J.W.; Park, J.Y. Design and Experiment of Hybridized Electromagnetic-Triboelectric Energy Harvester Using Halbach Magnet Array from Handshaking Vibration. Energy Convers. Manag. 2017, 153, 1–11. [Google Scholar] [CrossRef]
- Salauddin, M.; Toyabur, R.M.; Maharjan, P.; Park, J.Y. High Performance Human-Induced Vibration Driven Hybrid Energy Harvester for Powering Portable Electronics. Nano Energy 2018, 45, 236–246. [Google Scholar] [CrossRef]
- Zhang, Z.X.; He, J.; Wen, T.; Zhai, C.; Han, J.Q.; Mu, J.; Jia, W.; Zhang, B.; Zhang, W.; Chou, X.; et al. Magnetically Levitated-Triboelectric Nanogenerator as a Self-Powered Vibration Monitoring Sensor. Nano Energy 2017, 33, 88–97. [Google Scholar] [CrossRef]
- Tao, X.; Zhou, Y.; Qi, K.; Guo, C.; Dai, Y.; He, J.; Dai, Z. Wearable Textile Triboelectric Generator Based on Nanofiber Core-Spun Yarn Coupled with Electret Effect. J. Colloid Interface Sci. 2022, 608, 2339–2346. [Google Scholar] [CrossRef]
- Gu, Y.; Liu, W.; Zhao, C.; Wang, P. A Goblet-Like Non-Linear Electromagnetic Generator for Planar Multi-Directional Vibration Energy Harvesting. Appl. Energy 2020, 266, 114846. [Google Scholar] [CrossRef]
- Yun, J.; Patel, S.N.; Reynolds, M.S.; Abowd, G.D. Design and Performance of an Optimal Inertial Power Harvester for Human-Powered. IEEE Trans. Mob. Comput. 2011, 10, 669–683. [Google Scholar] [CrossRef]
- Salauddin, M.; Toyabur, R.M.; Maharjan, P.; Rasel, M.S.; Kim, J.W.; Cho, H.; Park, J.Y. Miniaturized Springless Hybrid Nanogenerator for Powering Portable and Wearable Electronic Devices from Human-Body-Induced Vibration. Nano Energy 2018, 51, 61–72. [Google Scholar] [CrossRef]
- Kim, J.W.; Salauddin, M.; Cho, H.; Rasel, M.S.; Park, J.Y. Electromagnetic Energy Harvester Based on a Finger Trigger Rotational Gear Module and an Array of Disc Halbach Magnets. Appl. Energy 2019, 250, 776–785. [Google Scholar] [CrossRef]
- Rahman, M.T.; Rana, S.M.S.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Kim, H.; Cho, H.; Park, J.Y. A Highly Miniaturized Freestanding Kinetic-Impact-Based Non -Resonant Hybridized Electromagnetic-Triboelectric Nanogenerator for Human Induced Vibrations Harvesting. Appl. Energy 2020, 279, 115799. [Google Scholar] [CrossRef]
- Deng, H.T.; Wang, Z.Y.; Wang, Y.L.; Wen, D.L.; Zhang, X.S. Integrated Hybrid Sensing and Microenergy for Compact Active Microsystems. Microsyst. Nanoeng. 2022, 8, 61. [Google Scholar] [CrossRef]
- Tang, G.; Wang, Z.; Hu, X.; Wu, S.J.; Xu, B.; Li, Z.; Yan, X.; Xu, F.; Yuan, D.; Li, P.; et al. A Non-Resonant Piezoelectric-Electromagnetic-Triboelectric Hybrid Energy Harvester for Low-Frequency Human Motions. Nanomaterials 2022, 12, 1168. [Google Scholar] [CrossRef]
- Salauddin, M.; Toyabur, R.M.; Maharjan, P.; Rasel, M.S.; Cho, H.; Park, J.Y. Design and Experimental Analysis of a Low-Frequency Resonant Hybridized Nanogenerator with a Wide Bandwidth and High Output Power Density. Nano Energy 2019, 66, 104122. [Google Scholar] [CrossRef]
- Wang, P.H.; Liu, R.Y.; Ding, W.B.; Zhang, P.; Pan, L.; Dai, G.; Zou, H.; Dong, K.; Xu, C.; Wang, Z.L. Complementary Electromagnetic-Triboelectric Active Sensor for Detecting Multiple Mechanical Triggering. Adv. Funct. Mater. 2018, 28, 1705808. [Google Scholar] [CrossRef]
- Wu, Z.Y.; Ding, W.B.; Dai, Y.J.; Dong, K.; Wu, C.S.; Zhang, L.; Lin, Z.; Cheng, J.; Wang, Z.L. Self-Powered Multifunctional Motion Sensor a, Enabled by Magnetic-Regulated Triboelectric Nanogenerator. ACS Nano 2018, 12, 5726–5733. [Google Scholar] [CrossRef]
- Maharjan, P.; Bhatta, T.; Cho, H.; Hui, X.; Park, C.; Yoon, S.; Salauddin, M.; Rahman, M.T.; Rana, S.S.; Park, J.Y. A Fully Functional Universal Self-Chargeable Power Module for Portable/Wearable Electronics and Self-Powered Iot Applications. Adv. Energy Mater. 2020, 10, 2002782. [Google Scholar] [CrossRef]
- Rana, S.M.S.; Salauddin, M.; Sharifuzzaman, M.; Lee, S.H.; Shin, Y.D.; Song, H.; Jeong, S.H.; Bhatta, T.; Shrestha, K.; Park, J.Y. Ultrahigh-Output Triboelectric and Electromagnetic Hybrid Generator for Self-Powered Smart Electronics and Biomedical Applications. Adv. Energy Mater. 2022, 12, 2202238. [Google Scholar] [CrossRef]
- Rana, S.M.S.; Rahman, M.T.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Cho, H.; Park, J.Y. A Human-Machine Interactive Hybridized Biomechanical Nanogenerator as a Self-Sustainable Power Source for Multifunctional Smart Electronics Applications. Nano Energy 2020, 76, 105025. [Google Scholar] [CrossRef]
- Chen, Y.L.; Liu, D.; Wang, S.; Li, Y.F.; Zhang, X.S. Self-Powered Smart Active RFID Tag Integrated with Wearable Hybrid Nanogenerator. Nano Energy 2019, 64, 103911. [Google Scholar] [CrossRef]
- Rahman, M.T.; Rana, S.M.S.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Park, J.Y. Biomechanical Energy-Driven Hybridized Generator as a Universal Portable Power Source for Smart/Wearable Electronics. Adv. Energy Mater. 2020, 10, 1903663. [Google Scholar] [CrossRef]
- Iqbal, M.; Nauman, M.M.; Khan, F.U.; Abas, E.; Cheok, Q.; Aissa, B. Nonlinear Multi-Mode Electromagnetic Insole Energy Harvester for Human-Powered Body Monitoring Sensors: Design, Modeling, and Characterization. Proc IMechE Part C J. Mech. Eng. Sci. 2021, 235, 6415–6426. [Google Scholar] [CrossRef]
- Pu, X.; Li, L.X.; Song, H.Q.; Du, C.H.; Zhao, Z.F.; Jiang, C.; Cao, G.; Hu, W.; Wang, Z.L. A Self-Charging Power Unit by Integration of a Textile Triboelectric Nanogenerator and a Flexible Lithium-Ion Battery for Wearable Electronics. Adv. Mater. 2015, 27, 2472–2478. [Google Scholar] [CrossRef]
- Yi, F.; Zhang, Z.; Kang, Z.; Liao, Q.L.; Zhang, Y. Recent Advances in Triboelectric Nanogenerator-Based Health Monitoring. Adv. Funct. Mater. 2019, 29, 1808849. [Google Scholar] [CrossRef]
- Li, T.; Xu, Y.; Willander, M.; Xing, F.; Cao, X.; Wang, N.; Wang, Z.L. Lightweight Triboelectric Nanogenerator for Energy Harvesting and Sensing Tiny Mechanical Motion. Adv. Funct. Mater. 2016, 26, 4370–4376. [Google Scholar] [CrossRef]
- Zhu, D.B.; Beeby, S.; Tudor, J.; Harris, N. Vibration Energy Harvesting Using the Halbach Array. Smart Mater. Struct. 2012, 21, 075020. [Google Scholar] [CrossRef]
- Fuentes-Abolafio, I.J.; Trinidad-Fernández, M.; Escriche-Escuder, A.; Roldán-Jiménez, C.; Arjona-Caballero, J.M.; Bernal-López, M.R.; Ricci, M.; Gómez-Huelgas, R.; Pérez-Belmonte, L.M.; Cuesta-Vargas, A.I. Kinematic Parameters That Can Discriminate in Levels of Functionality in the Six-Minute Walk Test in Patients with Heart Failure with a Preserved Ejection Fraction. J. Clin. Med. 2022, 12, 241. [Google Scholar] [CrossRef]
- Lin, H.C.; Chen, M.J.; Lee, C.H.; Kung, L.C.; Huang, J.T. Fall Recognition Based on an IMU Wearable Device and Fall Verification through a Smart Speaker and the loT. Sensors 2023, 23, 5472. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Lin, X.; Yang, C.; Yang, S.; Liu, C.; Cao, Y. Wearable Sensors Based on Miniaturized High-Performance Hybrid Nanogenerator for Medical Health Monitoring. Biosensors 2024, 14, 361. https://doi.org/10.3390/bios14080361
Wu J, Lin X, Yang C, Yang S, Liu C, Cao Y. Wearable Sensors Based on Miniaturized High-Performance Hybrid Nanogenerator for Medical Health Monitoring. Biosensors. 2024; 14(8):361. https://doi.org/10.3390/bios14080361
Chicago/Turabian StyleWu, Jinjing, Xiaobo Lin, Chengkai Yang, Sirui Yang, Chenning Liu, and Yuanyuan Cao. 2024. "Wearable Sensors Based on Miniaturized High-Performance Hybrid Nanogenerator for Medical Health Monitoring" Biosensors 14, no. 8: 361. https://doi.org/10.3390/bios14080361
APA StyleWu, J., Lin, X., Yang, C., Yang, S., Liu, C., & Cao, Y. (2024). Wearable Sensors Based on Miniaturized High-Performance Hybrid Nanogenerator for Medical Health Monitoring. Biosensors, 14(8), 361. https://doi.org/10.3390/bios14080361