Eye-Movement-Controlled Wheelchair Based on Flexible Hydrogel Biosensor and WT-SVM

Abstract
1. Introduction
2. Design and Method
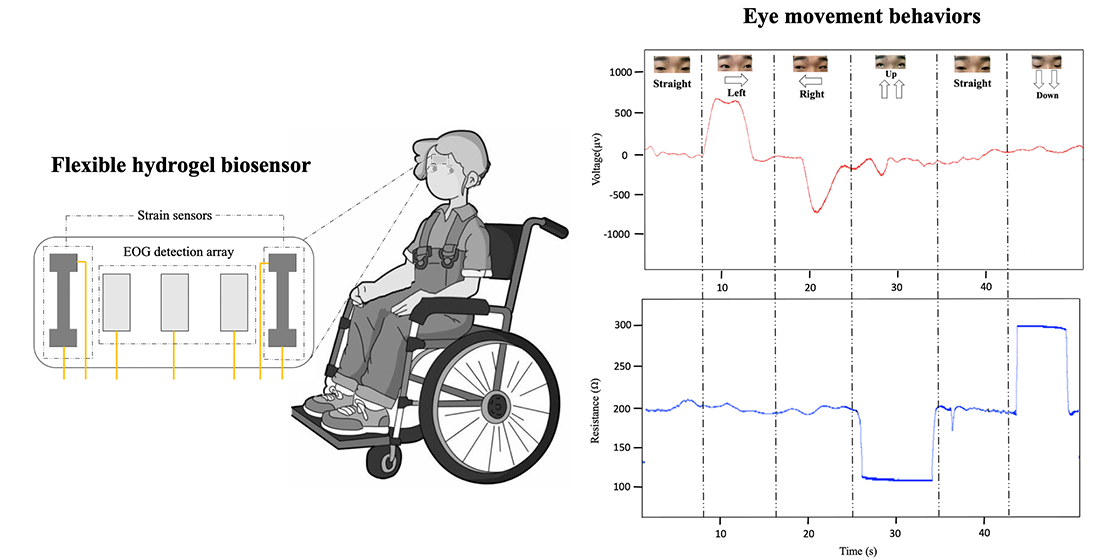
2.1. Human–Wheelchair Interaction
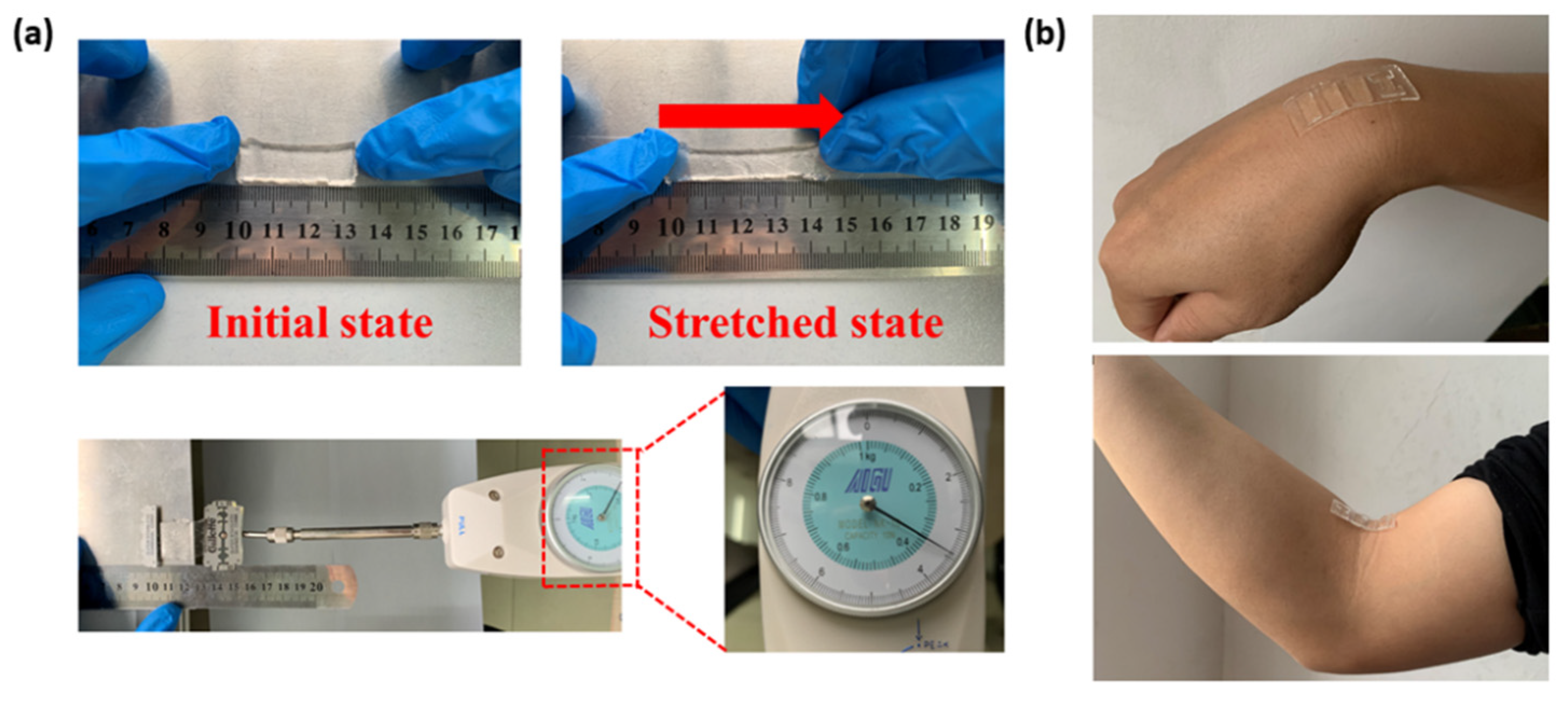
2.2. Fabrication of A Flexible Biosensor
2.3. Signal Acquisition and Classification
3. Experimental Results Analysis
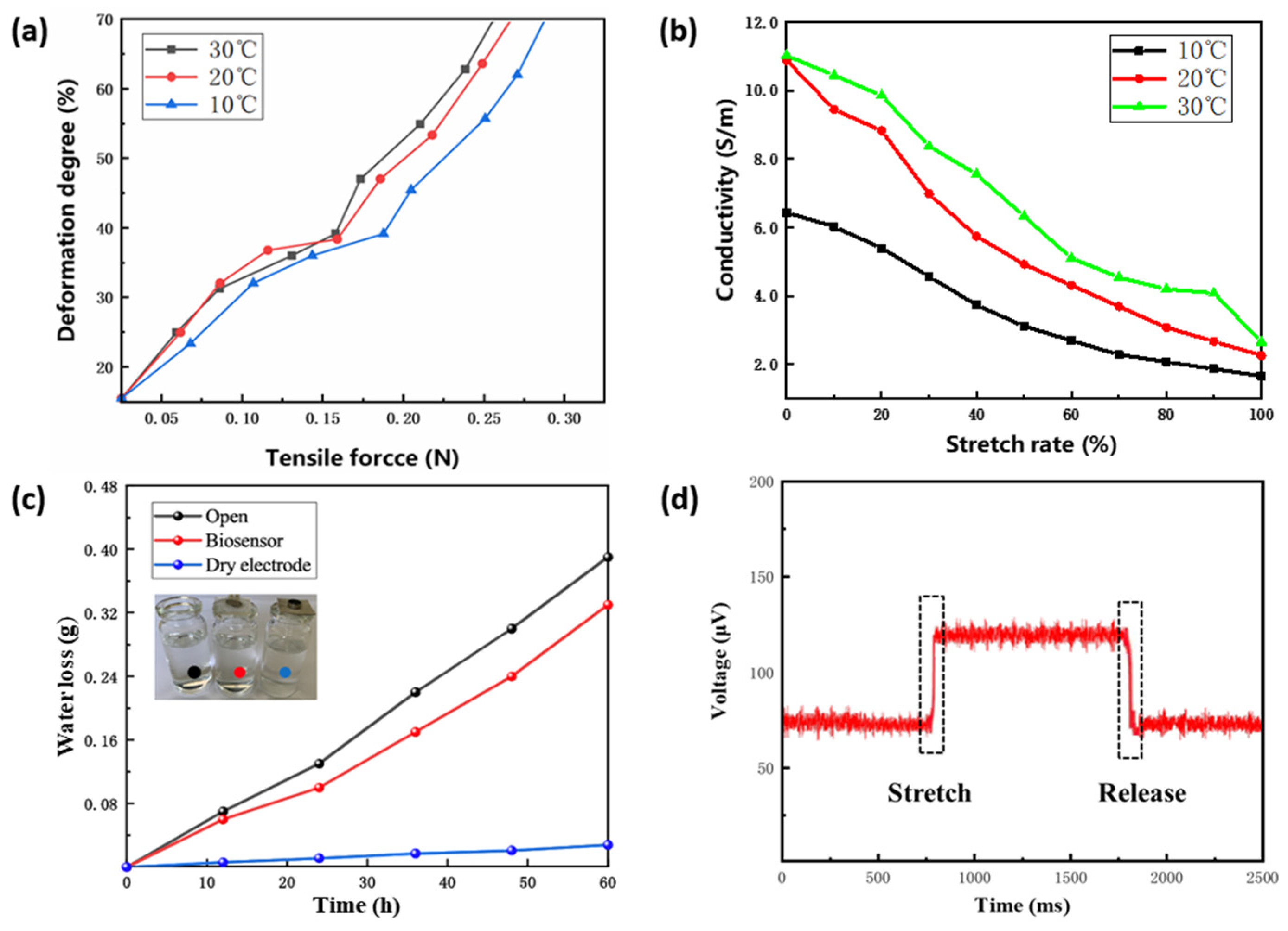
3.1. Performance of Flexible Hydrogel Biosensor
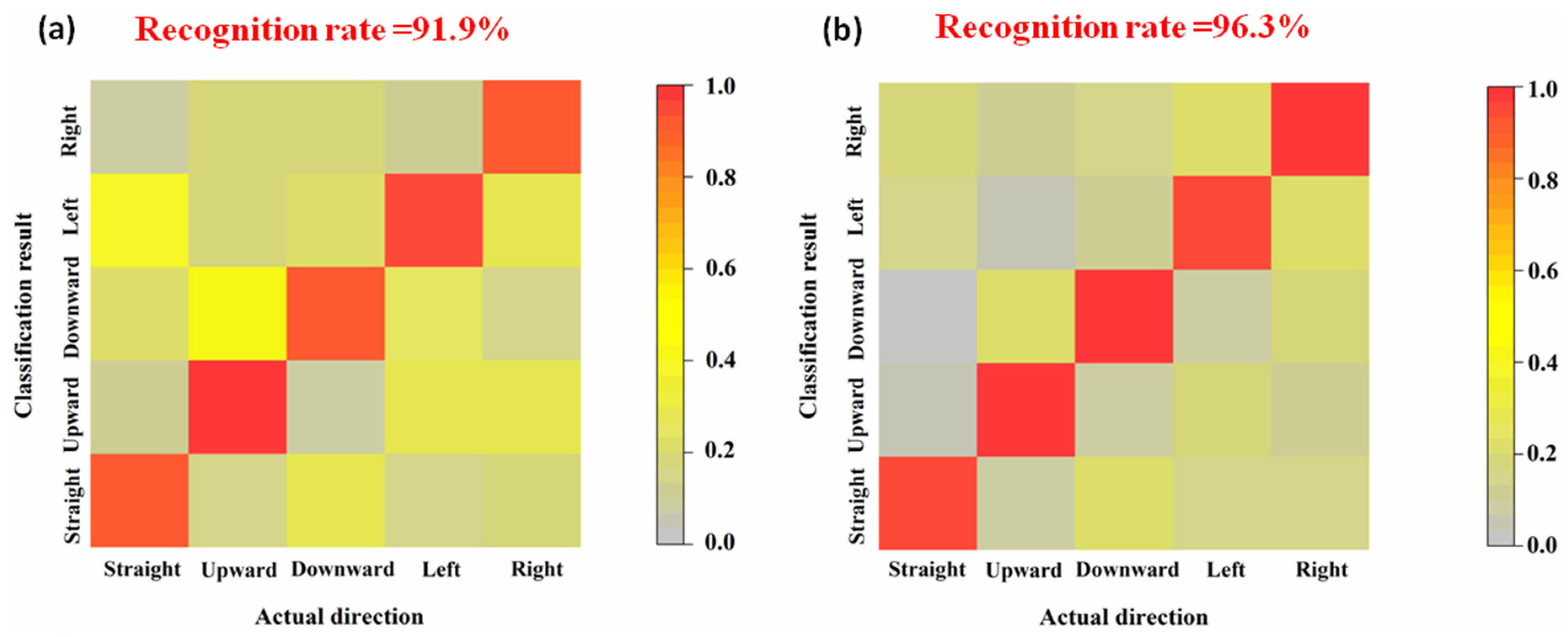
3.2. Eye Movements Identification
3.3. In-Site Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Disabled People in the World in 2019: Facts and Figures. Available online: https://www.inclusivecitymaker.com/disabled-people-in-the-world-in-2019-facts-and-figures/ (accessed on 25 February 2020).
- Kundu, A.S.; Mazumder, O.; Lenka, P.K.; Bhaumik, S. Hand Gesture Recognition Based Omnidirectional Wheelchair Control Using IMU and EMG Sensors. J. Intell. Robot. Syst. 2018, 91, 1–13. [Google Scholar] [CrossRef]
- Jha, P.; Khurana, P. Hand Gesture Controlled Wheelchair. Int. J. Sci. Technol. Res. 2016, 9, 243–249. [Google Scholar]
- Yassine, R.; Makrem, M.; Farhat, F. Intelligent Control Wheelchair Using a New Visual Joystick. J. Healthc. Eng. 2018, 2018, 1–20. [Google Scholar]
- Lopes, J.; Sim, O.M.; Mendes, N.; Safeea, M.; Afonso, J.; Neto, P. Hand/arm Gesture Segmentation by Motion Using IMU and EMG Sensing. Procedia Manuf. 2017, 11, 107–113. [Google Scholar] [CrossRef]
- Neubert, S.; Thurow, K.; Stoll, N.; Ruzaij, M.F. Hybrid Voice Controller for Intelligent Wheelchair and Rehabilitation Robot Using Voice Recognition and Embedded Technologies. J. Adv. Comput. Intell. Intell. Inform. 2016, 20, 615–622. [Google Scholar]
- Voznenko, T.I.; Chepin, E.V.; Urvanov, G.A. The Control System Based on Extended BCI for a Robotic Wheelchair. Procedia Comput. Sci. 2018, 123, 522–527. [Google Scholar] [CrossRef]
- Nishimori, M.; Saitoh, T.; Konishi, R. Voice controlled intelligent wheelchair. In Proceedings of the SICE Annual Conference, Takamatsu, Japan, 17–20 September 2007. [Google Scholar]
- Chahal, B.M. Microcontoller Based Gesture Controlled Wheelchair Using Accelerometer. Int. J. Eng. Sci. Res. Technol. 2014, 3, 1065–1070. [Google Scholar]
- Srinivasan, A.; Vinoth, T.R.; Ravinder, R.; Mosses, S.P.; Kumar, Y. Voice Controlled Wheel Chair with Intelligent Stability. J. Comput. Theor. Nanosci. 2020, 17, 3689–3693. [Google Scholar] [CrossRef]
- Eid, M.A.; Giakoumidis, N.; Saddik, A.E. A Novel Eye-Gaze-Controlled Wheelchair System for Navigating Unknown Environments: Case Study With a Person With ALS. IEEE Access 2016, 4, 558–573. [Google Scholar] [CrossRef]
- Meena, Y.K.; Cecotti, H.; Wong-Lin, K.F.; Prasad, G. A multimodal interface to resolve the Midas-Touch problem in gaze controlled wheelchair. In Proceedings of the Engineering in Medicine & Biology Society, Jeju, Korea, 11–15 July 2017. [Google Scholar]
- Dahmani, M.; Chowdhury, M.; Khandakar, A.; Rahman, T.; Kiranyaz, S. An Intelligent and Low-Cost Eye-Tracking System for Motorized Wheelchair Control. Sensors 2020, 20, 3936. [Google Scholar] [CrossRef]
- Larrazabal, A.J.; Cena, C.; Martínez, C. Video-oculography eye tracking towards clinical applications: A review. Comput. Biol. Med. 2019, 108, 57–66. [Google Scholar] [CrossRef]
- Nobuaki, K.; Masahiro, N. BCI-based control of electric wheelchair using fractal characteristics of EEG. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 1795–1803. [Google Scholar]
- Shahin, M.K.; Tharwat, A.; Gaber, T.; Hassanien, A.E. A Wheelchair Control System Using Human-Machine Interaction: Single-Modal and Multimodal Approaches. J. Intell. Syst. 2017, 28, 115–132. [Google Scholar] [CrossRef]
- Liu, R.; Wang, Y.; Newman, G.I.; Thakor, N.V.; Ying, S. EEG Classification with a Sequential Decision-Making Method in Motor Imagery BCI. Int. J. Neural Syst. 2017, 27, 1750046. [Google Scholar] [CrossRef] [PubMed]
- Antoniou, E.; Bozios, P.; Christou, V.; Tzimourta, K.D.; Tzallas, A.T. EEG-Based Eye Movement Recognition Using the Brain–Computer Interface and Random Forests. Sensors 2021, 21, 2339. [Google Scholar] [CrossRef] [PubMed]
- Zaydoon, T.; Zaidan, B.B.; Zaidan, A.A.; Suzani, M.S. A Review of Disability EEG based Wheelchair Control System: Coherent Taxonomy, Open Challenges and Recommendations. Comput. Methods Programs Biomed. 2018, 164, 221–237. [Google Scholar]
- Mishra, S.; Norton, J.; Lee, Y.; Lee, D.S.; Agee, N.; Chen, Y.; Chun, Y. Soft, Conformal Bioelectronics for a Wireless Human-Wheelchair Interface. Biosens. Bioelectron. 2017, 91. [Google Scholar] [CrossRef]
- Qiyun, H.; Yang, C.; Zhijun, Z.; Shenghong, H.; Rui, Z.; Jun, L.; Yuandong, Z.; Ming, S.; Yuanqing, L. An EOG-based wheelchair robotic arm system for assisting patients with severe spinal cord injuries. J. Neural Eng. 2019, 16, 026021. [Google Scholar]
- Huang, Q.; He, S.; Wang, Q.; Gu, Z.; Peng, N.; Li, K.; Zhang, Y.; Shao, M.; Li, Y. An EOG-Based Human-Machine Interface for Wheelchair Control. IEEE Trans. Biomed. Eng. 2017, 65, 2023–2032. [Google Scholar] [CrossRef]
- Huang, Q.; Zhang, Z.; Yu, T.; He, S.; Li, Y. An EEG-/EOG-Based Hybrid Brain-Computer Interface: Application on Controlling an Integrated Wheelchair Robotic Arm System. Front. Neurosci. 2019, 13, 1243. [Google Scholar] [CrossRef]
- Choudhari, A.M.; Porwal, P.; Jonnalagedda, V.; Mériaudeau, F. An Electrooculography based Human Machine Interface for wheelchair control. Biocybern. Biomed. Eng. 2019, 39, 673–685. [Google Scholar] [CrossRef]
- Rui, Z.; He, S.; Yang, X.; Wang, X.; Kai, L.; Huang, Q.; Gu, Z.; Yu, Z.; Zhang, X.; Tang, D. An EOG-Based Human-Machine Interface to Control a Smart Home Environment for Patients With Severe Spinal Cord Injuries. IEEE Trans. Biomed. Eng. 2018, 66, 89–100. [Google Scholar]
- Kaur, A. Wheelchair control for disabled patients using EMG/EOG based human machine interface: A review. J. Med Eng. Technol. 2020, 45, 1–22. [Google Scholar]
- Martínez-Cerveró, J.; Ardali, M.K.; Jaramillo-Gonzalez, A.; Wu, S.; Chaudhary, U. Open Software/Hardware Platform for Human- Computer Interface Based on Electrooculography (EOG) Signal Classification. Sensors 2020, 20, 2443. [Google Scholar] [CrossRef]
- Paul, G.M.; Cao, F.; Torah, R.; Yang, K. A Smart Textile Based Facial EMG and EOG Computer Interface. IEEE Sens. J. 2013, 14, 393–400. [Google Scholar] [CrossRef]
- Zeng, H.; Song, A.; Yan, R.; Qin, H. EOG Artifact Correction from EEG Recording Using Stationary Subspace Analysis and Empirical Mode Decomposition. Sensors 2013, 13, 14839–14859. [Google Scholar] [CrossRef]
- Aziz, F.; Arof, H.; Mokhtar, N.; Mubin, M. HMM based automated wheelchair navigation using EOG traces in EEG. J. Neural Eng. 2014, 11, 056018. [Google Scholar] [CrossRef]
- Fang, F.; Takahiro, S.; Stefano, F. Electrooculography-based continuous eye-writing recognition system for efficient assistive communication systems. PLoS ONE 2018, 13, e0192684. [Google Scholar] [CrossRef]
- Rastjoo, A.; Arabalibeik, H. Evaluation of Hidden Markov Model for p300 detection in EEG signal. Stud. Health Technol. Inform. 2009, 142, 265–267. [Google Scholar]
- Zhu, Y.; Yan, Y.; Komogortsev, O. Hierarchical HMM for Eye Movement Classification; Springer: Cham, Germany, 2020. [Google Scholar]
- Abdollahpour, M.; Rezaii, T.Y.; Farzamnia, A.; Saad, I. Transfer Learning Convolutional Neural Network for Sleep Stage Classification Using Two-Stage Data Fusion Framework. IEEE Access 2020, 8, 180618–180632. [Google Scholar] [CrossRef]
- Jadhav, P.; Rajguru, G.; Datta, D.; Mukhopadhyay, S. Automatic sleep stage classification using time–frequency images of CWT and transfer learning using convolution neural network. Biocybern. Biomed. Eng. 2020, 40, 494–504. [Google Scholar] [CrossRef]
- Andreotti, F.; Phan, H.; Cooray, N.; Lo, C.; Hu, M.T.; De Vos, M. Multichannel Sleep Stage Classification and Transfer Learning using Convolutional Neural Networks. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018. [Google Scholar]
- Haque, R.U.; Pongos, A.L.; Manzaneres, C.M.; Lah, J.J.; Levey, A.I.; Clifford, G.D. Deep Convolutional Neural Networks and Transfer Learning for Measuring Cognitive Impairment Using Eye-Tracking in a Distributed Tablet-Based Environment. IEEE Trans. Biomed. Eng. 2021, 68, 11–18. [Google Scholar] [CrossRef]
- Shah, J.H.; Sharif, M.; Yasmin, M.; Fernandes, S.L. Facial Expressions Classification and False Label Reduction Using LDA and Threefold SVM. Pattern Recognit. Lett. 2017. [Google Scholar] [CrossRef]
- Zheng-Hua, M.A.; Qiao, Y.T.; Lei, L.I.; Rong, H.L. Classification of surface EMG signals based on LDA. Comput. Eng. Sci. 2016. [Google Scholar] [CrossRef]
- He, S.; Li, Y. A Single-channel EOG-based Speller. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1978–1987. [Google Scholar] [CrossRef]
- Tang, H.; Yue, Z.; Wei, H.; Wei, F. An anti-interference EEG-EOG hybrid detection approach for motor image identification and eye track recognition. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Basha, A.J.; Balaji, B.S.; Poornima, S.; Prathilothamai, M.; Venkatachalam, K. Support vector machine and simple recurrent network based automatic sleep stage classification of fuzzy kernel. J. Ambient Intell. Humaniz. Comput. 2020, 1–9. [Google Scholar] [CrossRef]
- Zhang, Z.; Wei, S.; Zhu, G.; Liu, F.; Li, Y.; Dong, X.; Liu, C.; Liu, F. Efficient sleep classification based on entropy features and support vector machine classifier. Physiol. Meas. 2018, 39, 115005. [Google Scholar] [CrossRef]
- Lajnef, T.; Chaibi, S.; Ruby, P.; Aguera, P.E.; Eichenlaub, J.B.; Samet, M.; Kachouri, A.; Jerbi, K. Learning machines and sleeping brains: Automatic sleep stage classification using decision-tree multi-class support vector machines. J. Neurosci. Methods 2015. [Google Scholar] [CrossRef]
- Andrea, R.; Alessio, T.; Marco, F.; Maria, S. A Flexible and Highly Sensitive Pressure Sensor Based on a PDMS Foam Coated with Graphene Nanoplatelets. Sensors 2016, 16, 2148. [Google Scholar]
- Wang, L.; Liu, J.; Yang, B.; Yang, C. PDMS-based low cost flexible dry electrode for long-term EEG measurement. IEEE Sensors J. 2012, 12, 2898–2904. [Google Scholar] [CrossRef]
- Yu, B.; Long, N.; Moussy, Y.; Moussy, F. A long-term flexible minimally-invasive implantable glucose biosensor based on an epoxy-enhanced polyurethane membrane. Biosens. Bioelectron. 2006, 21, 2275–2282. [Google Scholar] [CrossRef]
- Bescond, Y.L.; Lebeau, J.; Delgove, L.; Sadek, H.; Raphael, B. Smooth eye movement interaction using EOG glasses. Rev. Stomatol. Chir. Maxillo Faciale 2016, 93, 185. [Google Scholar]
- Ning, H.; Karube, Y.; Arai, M.; Watanabe, T.; Cheng, Y.; Yuan, L.; Liu, Y.; Fukunaga, H. Investigation on sensitivity of a polymer/carbon nanotube composite strain sensor. Carbon 2010, 48, 680–687. [Google Scholar]
- Aungsakul, S.; Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Evaluating Feature Extraction Methods of Electrooculography (EOG) Signal for Human-Computer Interface. Procedia Eng. 2012, 32, 246–252. [Google Scholar] [CrossRef]
- Wang, W.S.; Wu, Z.C.; Huang, H.Y.; Luo, C.H. Low-Power Instrumental Amplifier for Portable ECG. In Proceedings of the IEEE Circuits & Systems International Conference on Testing & Diagnosis, Chengdu, China, 28–29 April 2009. [Google Scholar]
- Naga, R.; Chandralingam, S.; Anjaneyulu, T.; Satyanarayana, K. Denoising EOG Signal using Stationary Wavelet Transform. Meas. Sci. Rev. 2012, 12, 46–51. [Google Scholar] [CrossRef]
- Agarwal, S.; Singh, V.; Rani, A.; Mittal, A.P. Hardware efficient denoising system for real EOG signal processing. J. Intell. Fuzzy Syst. Appl. Eng. Technol. 2017, 32, 2857–2862. [Google Scholar] [CrossRef]
- Singh, B.; Wagatsuma, H. Two-stage wavelet shrinkage and EEG-EOG signal contamination model to realize quantitative validations for the artifact removal from multiresource biosignals. Biomed. Signal Process. Control 2018, 47, 96–114. [Google Scholar] [CrossRef]
- Kim, Y.-S.; Lee, J.; Ameen, A.; Shi, L.; Li, M.; Wang, S.; Ma, R.; Jin, S.H.; Kang, Z.; Huang, Y.; et al. Multifunctional Epidermal Electronics Printed Directly Onto the Skin. Adv. Mater. 2013, 25. [Google Scholar] [CrossRef]
- Lu, N.; Chi, L.; Yang, S.; Rogers, J. Highly Sensitive Skin-Mountable Strain Gauges Based Entirely on Elastomers. Adv. Funct. Mater. 2012, 22, 4044–4050. [Google Scholar] [CrossRef]
- Lee, Y.Y.; Lee, J.H.; Cho, J.Y.; Kim, N.R.; Nam, D.H.; Choi, I.S.; Nam, K.T.; Joo, Y.C. Stretching—Induced Growth of PEDOT—Rich Cores: A New Mechanism for Strain-Dependent Resistivity Change in PEDOT:PSS Films. Adv. Funct. Mater. 2013, 23, 4020–4027. [Google Scholar] [CrossRef]
- Memarian, F.; Fereidoon, A.; Ganji, M. Graphene Young’s modulus: Molecular mechanics and DFT treatments. Superlattices Microstruct. 2015, 85, 348–356. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Stretchable Sensitivity | Young’s Modulus | Ref. |
|---|---|---|---|
| CNTs/PDMS | 5.1 mV·N−1 | 445 KPa | [56] |
| PEDOT:PSS | 0.4 μV·N−1 | 2 × 106 KPa | [57] |
| Graphene | 83.9 μV·N−1 | 9 × 108 KPa | [58] |
| HPC/PVA | 7.8 mV·N−1 | 286 KPa | Our work |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Xiao, Y.; Deng, F.; Chen, Y.; Zhang, H. Eye-Movement-Controlled Wheelchair Based on Flexible Hydrogel Biosensor and WT-SVM. Biosensors 2021, 11, 198. https://doi.org/10.3390/bios11060198
Wang X, Xiao Y, Deng F, Chen Y, Zhang H. Eye-Movement-Controlled Wheelchair Based on Flexible Hydrogel Biosensor and WT-SVM. Biosensors. 2021; 11(6):198. https://doi.org/10.3390/bios11060198
Chicago/Turabian StyleWang, Xiaoming, Yineng Xiao, Fangming Deng, Yugen Chen, and Hailiang Zhang. 2021. "Eye-Movement-Controlled Wheelchair Based on Flexible Hydrogel Biosensor and WT-SVM" Biosensors 11, no. 6: 198. https://doi.org/10.3390/bios11060198
APA StyleWang, X., Xiao, Y., Deng, F., Chen, Y., & Zhang, H. (2021). Eye-Movement-Controlled Wheelchair Based on Flexible Hydrogel Biosensor and WT-SVM. Biosensors, 11(6), 198. https://doi.org/10.3390/bios11060198