
Free Vibrations of Bernoulli-Euler Nanobeams with Point Mass Interacting with Heavy Fluid Using Nonlocal Elasticity




Abstract
:1. Introduction
2. Equilibrium Equations and Boundary Conditions
2.1. Separation of Variables Method
2.2. Application of Nonlocal PurelySDM Theory
2.3. Definition of the Eigenfrequencies of the Beam-Fluid System
3. Examples
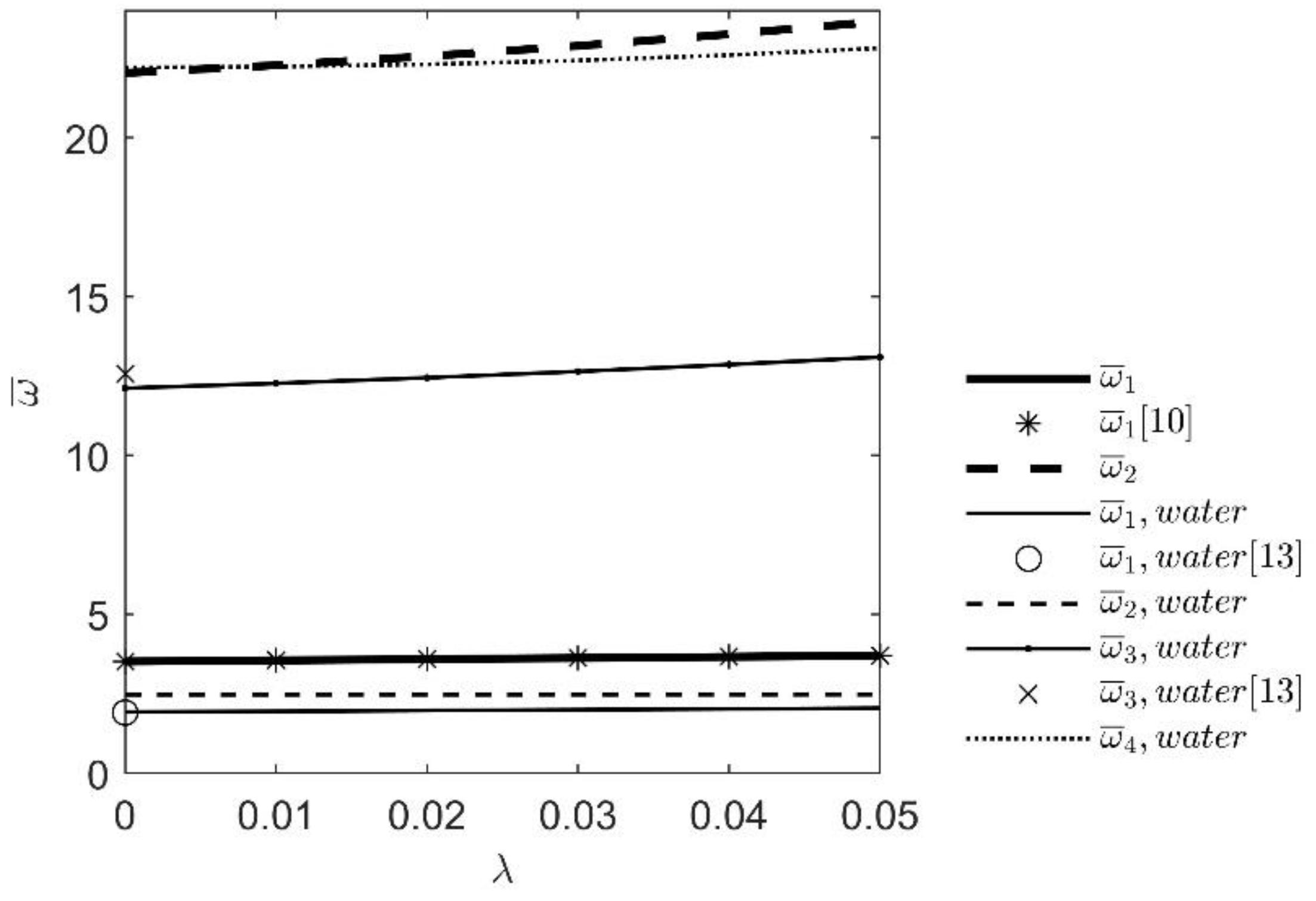
3.1. Convergence and the Influence of Nonlocal Parameter
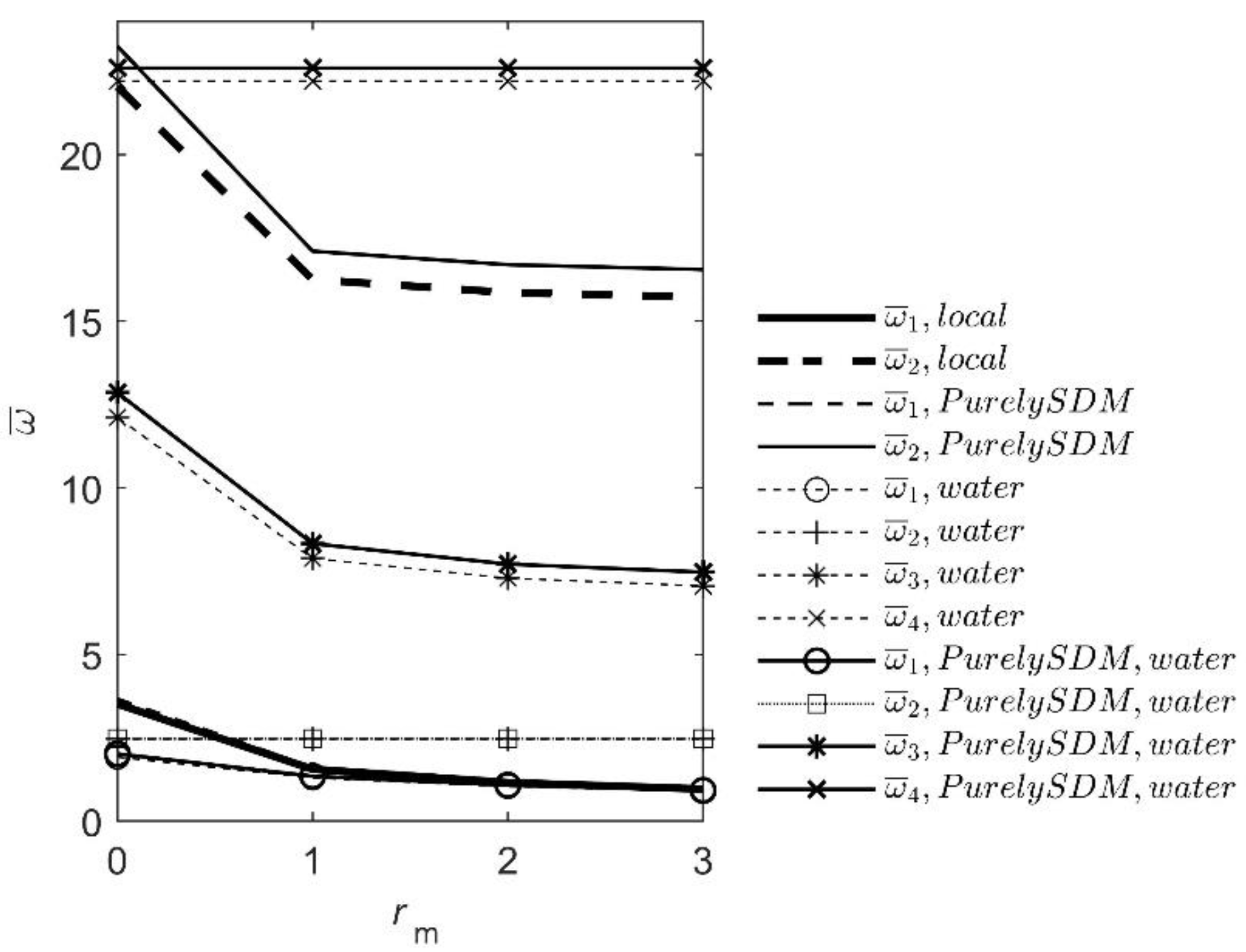
3.2. The Influence of Tip Point Mass, Water and Nano-Scale Effects
4. Conclusions
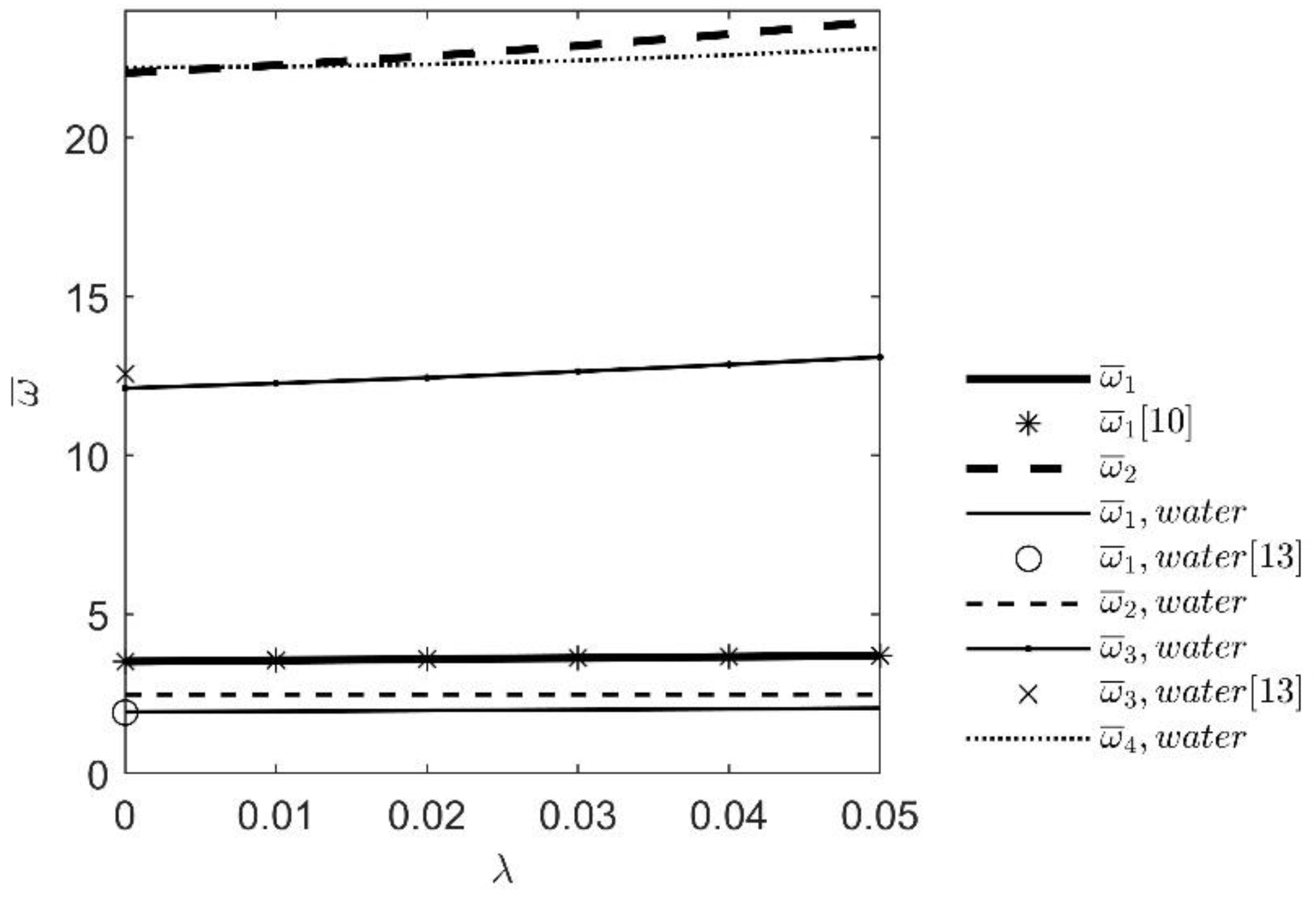
- an increase of the nonlocal parameter of PurelySDM method leads to an increase of the eigenfrequencies for all tested boundary conditions of the system beam-water, indicating a higher stiffness,
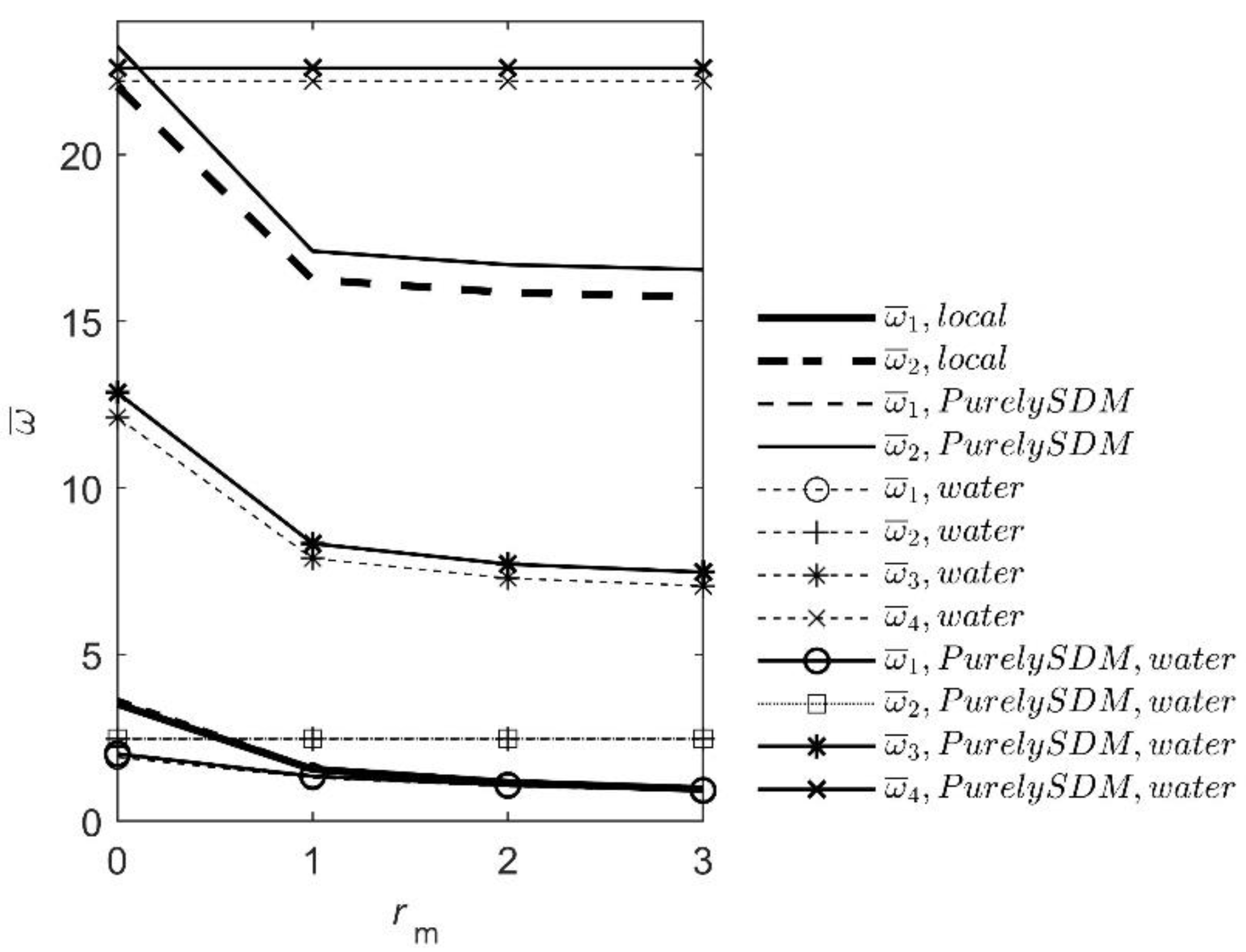
- the increase in point mass leads to a decrease in eigenfrequencies of a nanobeam for both local and nonlocal theory,
- the calculated eigenfrequencies of the coupled system with the local and nonlocal theory (corresponding to frequencies of the water domain) are equal for various tip point masses, but growth of eigenfrequencies occurs with the growth of the nonlocal parameter of PurelySDM method,
- when the beam is immersed in water, the main effect of the tip point mass (decrease of the eigenfrequency) is reduced for local and nonlocal theories. This effect can have a crucial impact on functionality of nanosensors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ouakad, H.M.; Sedighi, H.M. Rippling effect on the structural response of electrostatically actuated single-walled carbon nanotube based NEMS actuators. Int. J. Non-Linear Mech. 2016, 87, 97–108. [Google Scholar] [CrossRef]
- Cooksey, G.A.; Patrone, P.N.; Hands, J.R.; Meek, S.E.; Kearsley, A.J. Dynamic measurement of nanoflows: Realisation of an optofluidic flow meter to the nanoliter-per-minute scale. Anal. Chem. 2019, 91, 10713–10722. [Google Scholar] [CrossRef] [PubMed]
- Quist, A.; Chand, A.; Ramachandran, S.; Cohen, D.; Lal, R. Piezoresistive cantilever based nanoflow and viscosity sensor for microchannels. RSC 2006, 6, 1450–1454. [Google Scholar] [CrossRef] [PubMed]
- Poncharal, P.; Wang, Z.; Ugarte, D.; De Heer, W.A. Electrostatic deflections and electromechanical resonances of carbon nanotubes. Science 1999, 283, 1513–1516. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elmer, F.J.; Dreier, M. Eigenfrequencies of a rectangular atomic force microscope cantilever in a medium. J. Appl. Phys. 1997, 81, 7709–7714. [Google Scholar] [CrossRef]
- Sader, J.E. Frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope. J. Appl. Phys. 1998, 84, 64–76. [Google Scholar] [CrossRef] [Green Version]
- Paul, M.R.; Cross, M.C. Stohastic dynamics of nanoscale mechanical oscillators immersed in a viscous fluid. Phys. Rev. Lett. 2004, 92, 235501. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kennedy, S.J.; Cole, D.G.; Clark, R.L. A method for atomic force microscopy cantilever stiffness calibration under heavy fluid loading. Rev. Sci. Instrum. 2009, 80, 125103. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eringen, A.C. (Ed.) Polar and nonlocal field theory. In Continuum Physics; Academic Press: New York, NY, USA, 1976; Volume 4. [Google Scholar]
- Romano, G.; Barretta, R. Stress-driven versus strain-driven nonlocal integral model for elastic nano-beams. Compos. B Eng. 2017, 114, 184–188. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R.; Diaco, M.; Marotti de Sciarra, F. Constitutive boundary conditions and paradoxes in nonlocal elastic nano-beams. Int. J. Mech. Sci. 2017, 121, 151–156. [Google Scholar] [CrossRef]
- Wang, Y.B.; Zhu, X.W.; Dai, H.H. Exact solutions for the static bending of euler-Bernoulli beams using Eringen’s two-phase local/nonlocal model. AIP Adv. 2016, 6, 085114. [Google Scholar] [CrossRef] [Green Version]
- Romano, G.; Barretta, R. Nonlocal elasticity in nanobeams: The stress-driven integral model. Int. J. Eng. Sci. 2017, 115, 14–27. [Google Scholar] [CrossRef]
- Barretta, R.; Marotti de Sciarra, F. Variational nonlocal gradient elasticity for nano-beams. Int. J. Eng. Sci. 2019, 143, 73–91. [Google Scholar] [CrossRef]
- Barretta, R.; Čanađija, M.; Marotti de Sciarra, F.; Skoblar, A.; Žigulić, R. Dynamic behavior of nanobeams under axial loads: Integral elasticity modeling and size-dependent eigenfrequencies assessment. Math. Meth. Appl. Sci. 2020, 1–18. [Google Scholar] [CrossRef]
- Apuzzo, A.; Barretta, R.; Luciano, R.; Marotti de Sciarra, F.; Penna, R. Free vibrations of Bernoulli-Euler nano-beams by the stress-driven nonlocal integral model. Compos. B Eng. 2017, 123, 105–111. [Google Scholar] [CrossRef]
- Meirovitch, L. Fundamentals of Vibrations; McGraw Hill International Edition: New York, NY, USA, 2001. [Google Scholar]
- Skoblar, A.; Žigulić, R.; Braut, S.; Blažević, S. Dynamic Response to Harmonic Transverse Excitation of Cantilever Euler-Bernoulli Beam Carrying a Point Mass. FME Trans. 2017, 45, 367–373. [Google Scholar] [CrossRef] [Green Version]
- Xing, J.T.; Price, W.G.; Pomfret, M.J.; Yam, L.H. Natural vibration of a beam-water interaction system. J. Sound Vib. 1997, 199, 491–512. [Google Scholar] [CrossRef]
- Acheson, D.J. Elementary Fluid Dynamics; Oxford University Press Inc.: New York, NY, USA, 1990. [Google Scholar]
- Han, R.P.S. A Simple and Accurate Added Mass Model for Hydrodynamic Fluid-Structure Interaction Analysis. J. Frankl. Inst. 1996, 333, 929–945. [Google Scholar] [CrossRef]
- Spiegel, M.R.; Lipschutz, S.; Liu, J. Mathematical Handbook of Formulas and Tables; McGraw-Hill Education: New York, NY, USA, 2018. [Google Scholar]
- Skoblar, A.; Žigulić, R.; Braut, S. Numerical ill-conditioning in evaluation of the dynamic response of structures with mode superposition method. Proc. Inst. Mech. Eng. Part C 2017, 231, 109–119. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
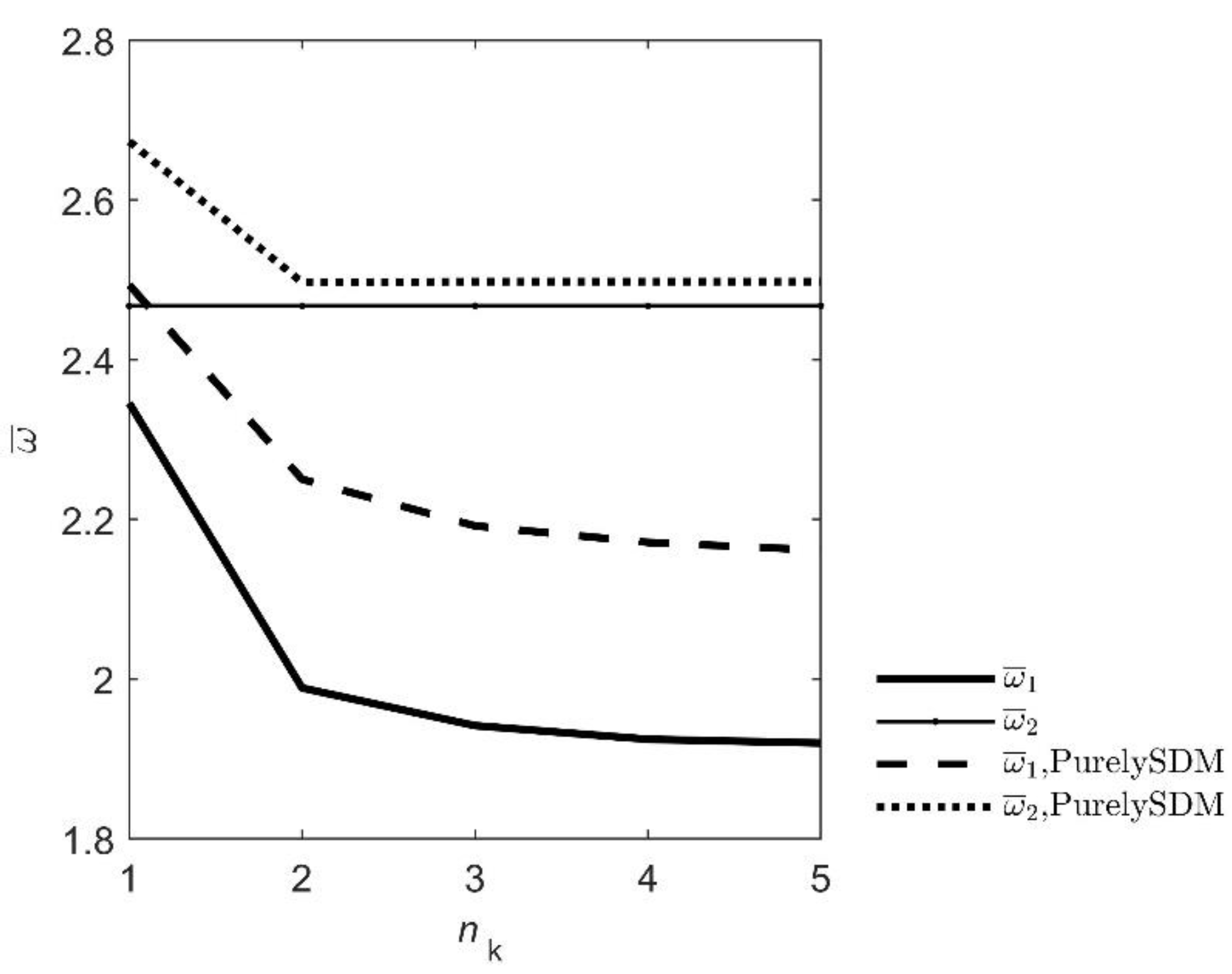
| nk | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| local theory | |||||
| 2.3456 | 1.9889 | 1.9418 | 1.9247 | 1.9169 | |
| 2.4674 | 2.4674 | 2.4674 | 2.4674 | 2.4674 | |
| nonlocal PurelySDM theory, λ = 0.1 | |||||
| 2.4936 | 2.2502 | 2.1919 | 2.1712 | 2.1615 | |
| 2.6732 | 2.4967 | 2.4977 | 2.4977 | 2.4977 | |
| λ | 0 | 0.01 | 0.02 | 0.03 | 0.04 | 0.05 |
| nk = 0 | ||||||
| 3.5160 | 3.5515 | 3.5877 | 3.6246 | 3.6621 | 3.7002 | |
| [10] | 3.516013 | 3.551528 | 3.587734 | 3.624609 | 3.662122 | 3.700236 |
| 22.0345 | 22.2764 | 22.5608 | 22.8868 | 23.2523 | 23.6552 | |
| nk = 4 | ||||||
| 1.9247 | 1.9482 | 1.972 | 1.9961 | 2.0206 | 2.0452 | |
| [13] 1 | 1.9047 | - | - | - | - | - |
| 2.4674 | 2.4677 | 2.4686 | 2.4701 | 2.4723 | 2.475 | |
| 12.1148 | 12.2681 | 12.4436 | 12.6404 | 12.8574 | 13.0929 | |
| [13] 1 | 12.5670 | - | - | - | - | - |
| 22.2066 | 22.2313 | 22.305 | 22.4274 | 22.5977 | 22.8147 | |
| rm | 0 | 1 | 2 | 3 |
|---|---|---|---|---|
| local theory, no fluid | ||||
| 3.5160 | 1.5573 | 1.1582 | 0.9628 | |
| 22.0345 | 16.2501 | 15.8609 | 15.7198 | |
| PurelySDM, λ = 0.04, no fluid | ||||
| 3.6621 | 1.609 | 1.1957 | 0.9937 | |
| 23.2523 | 17.1006 | 16.6962 | 16.5498 | |
| local theory; fluid, nk = 4 | ||||
| 1.9247 | 1.2982 | 1.0404 | 0.8923 | |
| 2.4674 | 2.4674 | 2.4674 | 2.4674 | |
| 12.1148 | 7.8824 | 7.2903 | 7.0561 | |
| 22.2066 | 22.2066 | 22.2066 | 22.2066 | |
| PurelySDM, λ = 0.04; fluid, nk = 4 | ||||
| 2.0206 | 1.3491 | 1.0781 | 0.9235 | |
| 2.4723 | 2.4723 | 2.4723 | 2.4723 | |
| 12.8574 | 8.3265 | 7.7124 | 7.4708 | |
| 22.5977 | 22.5977 | 22.5977 | 22.5977 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barretta, R.; Čanađija, M.; Marotti de Sciarra, F.; Skoblar, A. Free Vibrations of Bernoulli-Euler Nanobeams with Point Mass Interacting with Heavy Fluid Using Nonlocal Elasticity. Nanomaterials 2022, 12, 2676. https://doi.org/10.3390/nano12152676
Barretta R, Čanađija M, Marotti de Sciarra F, Skoblar A. Free Vibrations of Bernoulli-Euler Nanobeams with Point Mass Interacting with Heavy Fluid Using Nonlocal Elasticity. Nanomaterials. 2022; 12(15):2676. https://doi.org/10.3390/nano12152676
Chicago/Turabian StyleBarretta, Raffaele, Marko Čanađija, Francesco Marotti de Sciarra, and Ante Skoblar. 2022. "Free Vibrations of Bernoulli-Euler Nanobeams with Point Mass Interacting with Heavy Fluid Using Nonlocal Elasticity" Nanomaterials 12, no. 15: 2676. https://doi.org/10.3390/nano12152676
APA StyleBarretta, R., Čanađija, M., Marotti de Sciarra, F., & Skoblar, A. (2022). Free Vibrations of Bernoulli-Euler Nanobeams with Point Mass Interacting with Heavy Fluid Using Nonlocal Elasticity. Nanomaterials, 12(15), 2676. https://doi.org/10.3390/nano12152676