
A Review of Smart Lubricant-Infused Surfaces for Droplet Manipulation


Abstract
1. Introduction
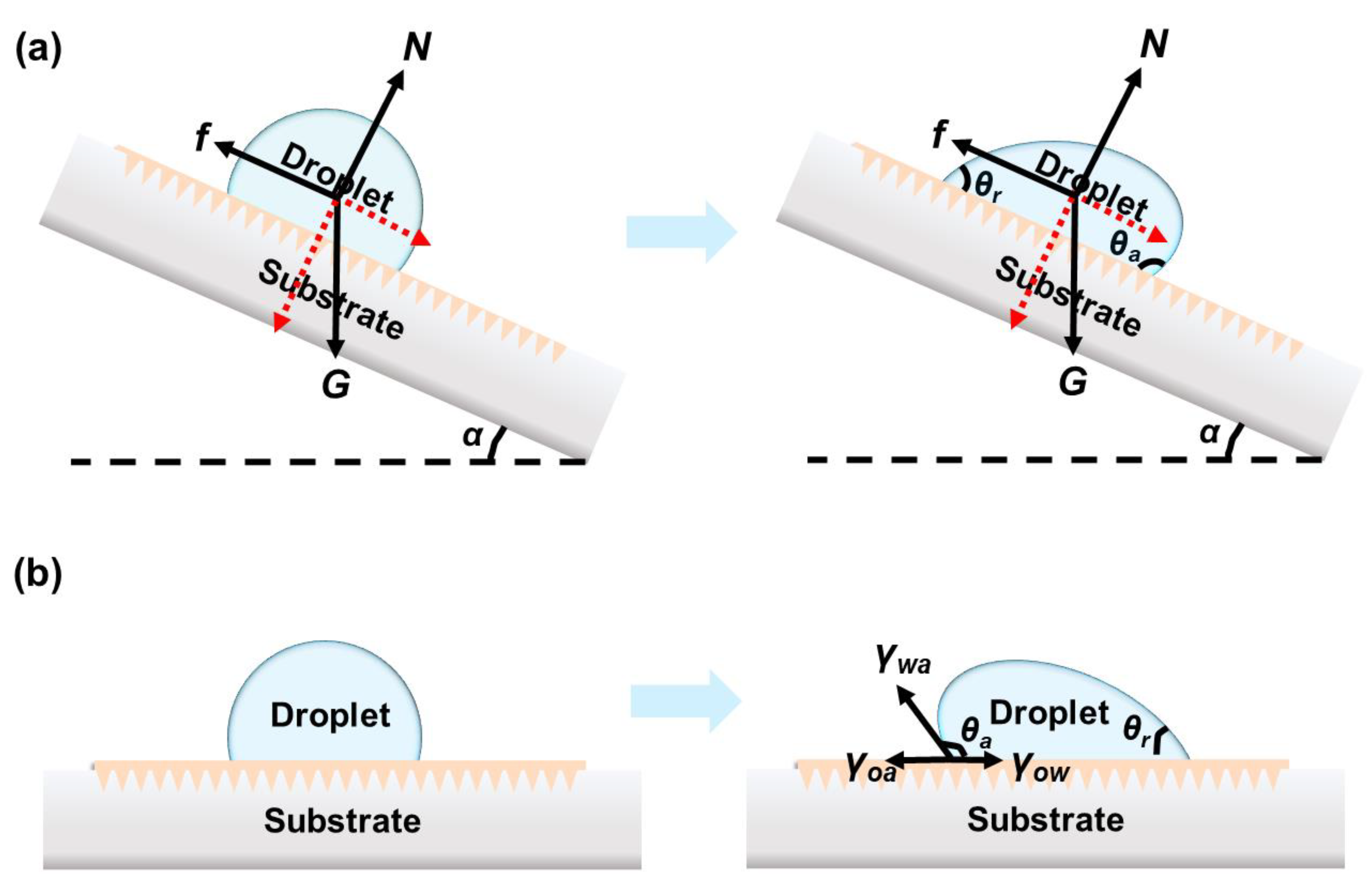
2. Fundamental of Droplet Mobility on LIS
2.1. Droplet Regime on LIS
2.2. Droplet Manipulation on LIS
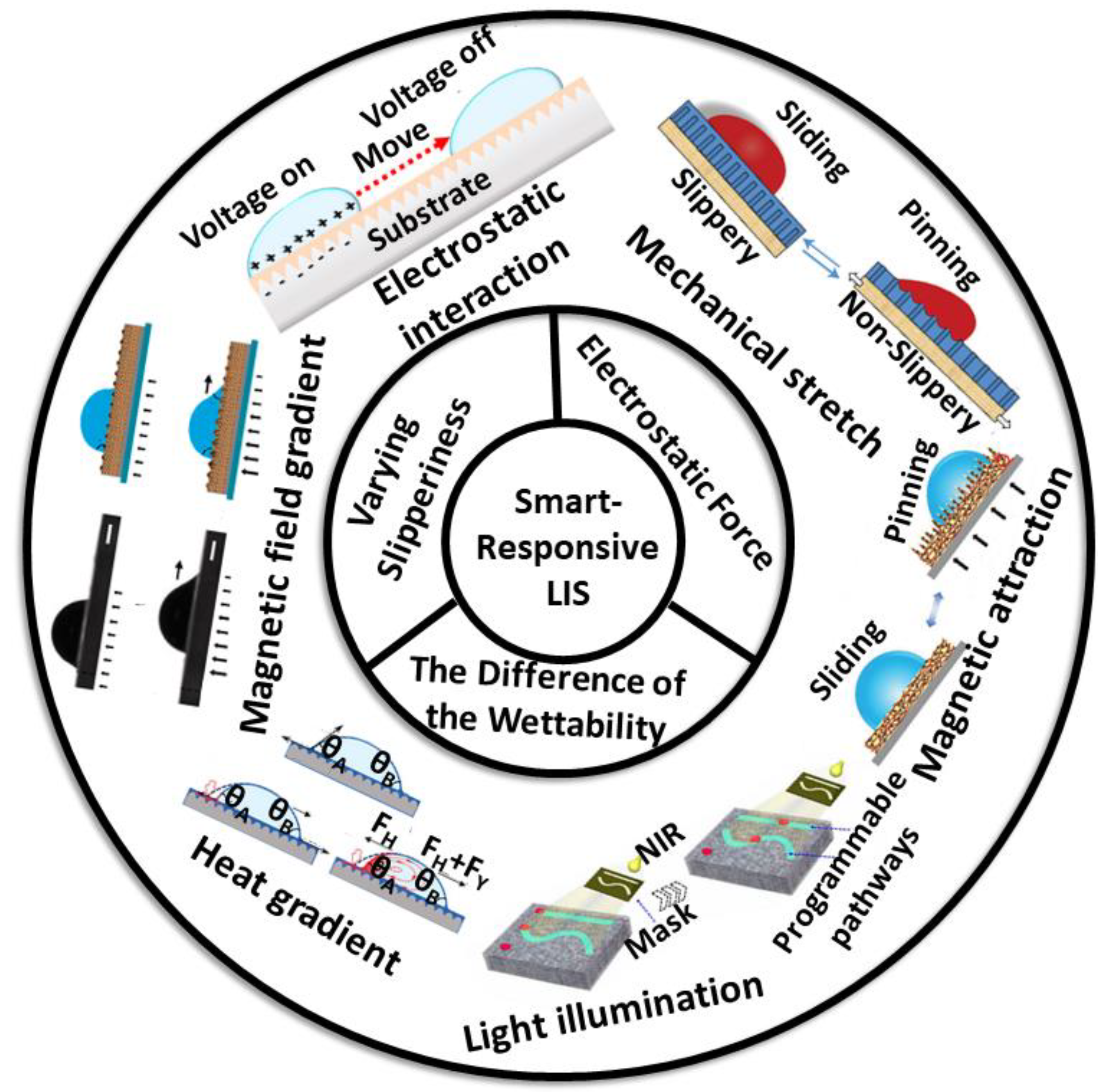
3. Droplet Manipulation on Smart LIS
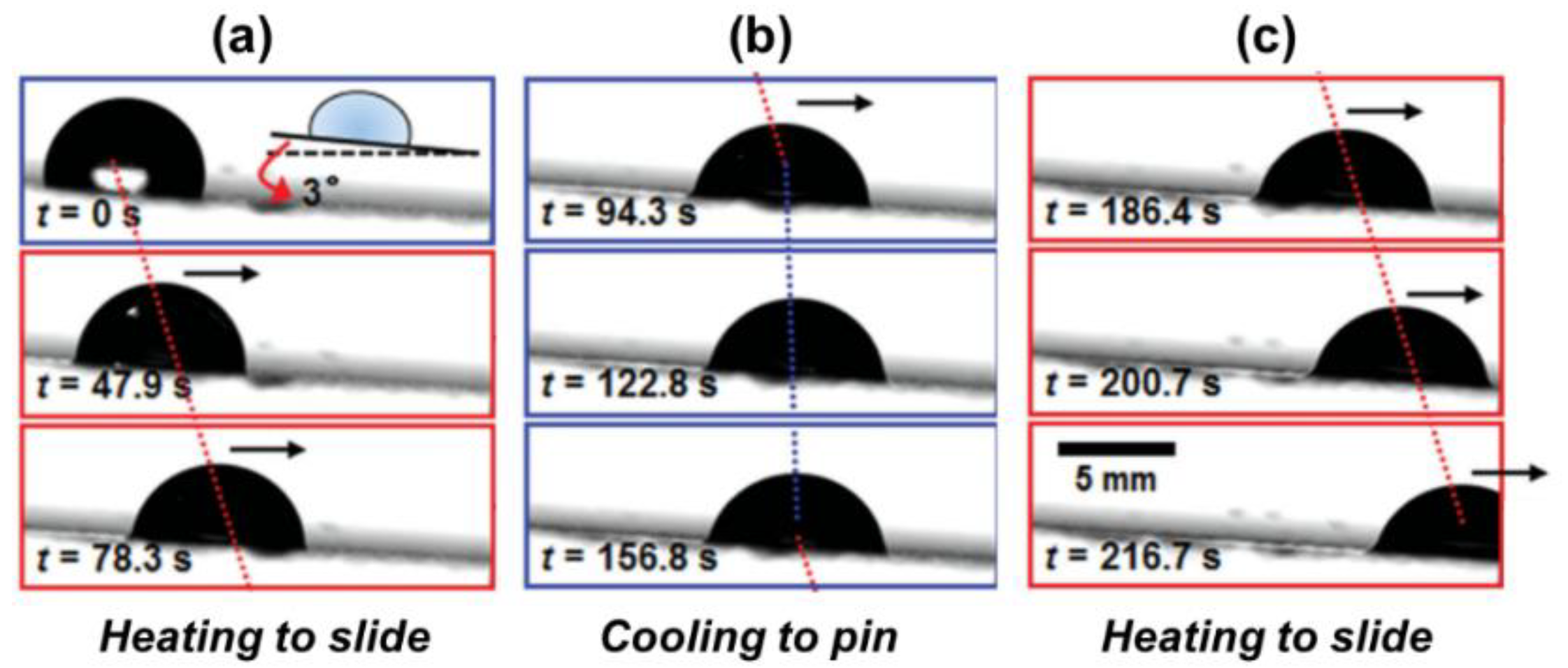
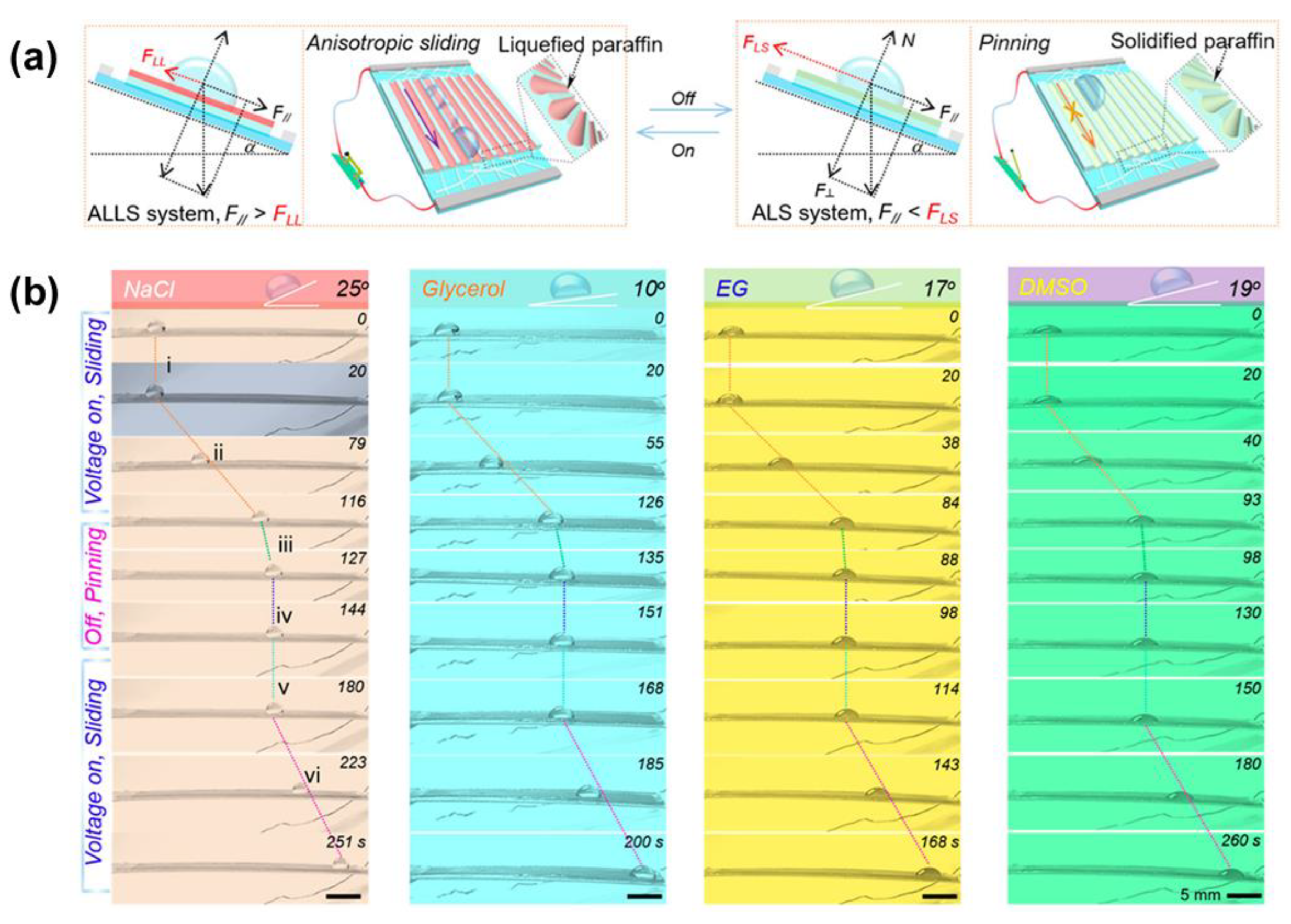
3.1. By Varying Slipperiness
3.2. By Electrostatic Force
3.3. By the Difference of the Wettability
3.4. By Other Means
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wong, T.S.; Kang, S.H.; Tang, S.K.; Smythe, E.J.; Hatton, B.D.; Grinthal, A.; Aizenberg, J. Bioinspired self-repairing slippery surfaces with pressure-stable omniphobicity. Nature 2011, 477, 443. [Google Scholar] [CrossRef]
- Xiao, Y.M.; Zhao, J.; Qiu, R.; Shi, Z.Q.; Niu, S.Y.; Wang, P. Slippery liquid-infused surface from three-dimensional interconnecting net structure via breath figure approach and its usage for biofouling inhibition. Prog. Org. Coat. 2018, 123, 47. [Google Scholar] [CrossRef]
- Ouyang, Y.B.; Zhao, J.; Qiu, R.; Shi, Z.Q.; Hu, S.G.; Zhang, Y.; Chen, M.; Wang, P. Liquid infused surface based on hierarchical dendritic iron wire array: An exceptional barrier to prohibit biofouling and biocorrosion. Prog. Org. Coat. 2019, 136, 105216. [Google Scholar] [CrossRef]
- Ouyang, Y.; Zhao, J.; Qiu, R.; Hu, S.; Zhang, Y.; Wang, P. Bioinspired superhydrophobic and oil-infused surface: Which is the better choice to prevent marine biofouling? Colloids Surf. A Physicochem. Eng. Asp. 2018, 559, 297. [Google Scholar] [CrossRef]
- Osborne, M.; Aryasomayajula, A.; Shakeri, A.; Selvaganapathy, P.R.; Didar, F.T. Suppression of Biofouling on a Permeable Membrane for Dissolved Oxygen Sensing using a Lubricant-Infused Coating. ACS Sensors 2019, 4, 687. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Zhang, D.; Sun, S.; Li, T.; Sun, Y. Fabrication of Slippery Lubricant-Infused Porous Surface with High Underwater Transparency for the Control of Marine Biofouling. ACS Appl. Mater. Interfaces 2017, 9, 972. [Google Scholar] [CrossRef] [PubMed]
- Shi, Z.Q.; Ouyang, Y.B.; Qiu, R.; Hu, S.G.; Zhang, Y.; Chen, M.; Wang, P. Bioinspired superhydrophobic and oil-infused nanostructured surface for Cu corrosion inhibition: A comparison study. Prog. Org. Coat. 2019, 131, 49. [Google Scholar] [CrossRef]
- Tenjimbayashi, M.; Nishioka, S.; Kobayashi, Y.; Kawase, K.; Li, J.; Abe, J.; Shiratori, S. A Lubricant-Sandwiched Coating with Long-Term Stable Anticorrosion Performance. Langmuir 2018, 34, 1386. [Google Scholar] [CrossRef]
- Gao, X.; Guo, Z. Mechanical stability, corrosion resistance of superhydrophobic steel and repairable durability of its slippery surface. J. Colloid Interface Sci. 2018, 512, 239. [Google Scholar] [CrossRef]
- Zhang, M.L.; Liu, Q.; Chen, R.R.; Chen, H.L.; Song, D.L.; Liu, J.Y.; Zhang, H.S.; Li, R.M.; Wang, Y.L.; Wang, J. Lubricant-infused coating by double-layer ZnO on aluminium and its anti-corrosion performance. J. Alloys Compd. 2018, 764, 730. [Google Scholar] [CrossRef]
- Tuo, Y.J.; Zhang, H.F.; Chen, W.P.; Liu, X.W. Corrosion protection application of slippery liquid-infused porous surface based on aluminum foil. Appl. Surf. Sci. 2017, 423, 365. [Google Scholar] [CrossRef]
- Hao, Z.; Chen, C.; Shen, T.; Lu, J.; Yang, H.-C.; Li, W. Slippery liquid-infused porous surface via thermally induced phase separation for enhanced corrosion protection. J. Polym. Sci. 2020, 58, 3031. [Google Scholar] [CrossRef]
- Cui, W.; Pakkanen, T.A. Icephobic performance of one-step silicone-oil-infused slippery coatings: Effects of surface energy, oil and nanoparticle contents. J. Colloid Interface Sci. 2020, 558, 251. [Google Scholar] [CrossRef]
- Li, T.; Zhuo, Y.Z.; Hakonsen, V.; Ronneberg, S.; He, J.Y.; Zhang, Z.L. Epidermal Gland Inspired Self-Repairing Slippery Lubricant-Infused Porous Coatings with Durable Low Ice Adhesion. Coatings 2019, 9, 602. [Google Scholar] [CrossRef]
- Cui, W.J.; Pakkanen, T.A. Fabrication of transparent icephobic surfaces with self-reparability: Effect of structuring and thickness of the lubricant-elastomer layer. Appl. Surf. Sci. 2020, 504, 144061. [Google Scholar] [CrossRef]
- Chatterjee, R.; Beysens, D.; Anand, S. Delaying Ice and Frost Formation using Phase-Switching Liquids. Adv. Mater. 2019, 31, e1807812. [Google Scholar] [CrossRef]
- Coady, M.J.; Wood, M.; Wallace, G.Q.; Nielsen, K.E.; Kietzig, A.M.; Lagugne-Labarthet, F.; Ragogna, P.J. Icephobic Behavior of UV-Cured Polymer Networks Incorporated into Slippery Lubricant-Infused Porous Surfaces: Improving SLIPS Durability. ACS Appl. Mater. Interfaces 2018, 10, 2890. [Google Scholar] [CrossRef] [PubMed]
- Phan, N.; Moronuki, N. Combination of silicon microstructures and porous cellulose nanofiber structures to improve liquid-infused-type self-cleaning function. Precis. Eng. 2018, 51, 638. [Google Scholar] [CrossRef]
- Zhang, D.; Xia, Y.; Chen, X.; Shi, S.; Lei, L. PDMS-Infused Poly (High Internal Phase Emulsion) Templates for the Construction of Slippery Liquid-Infused Porous Surfaces with Self-cleaning and Self-repairing Properties. Langmuir 2019, 35, 8276. [Google Scholar] [CrossRef]
- Wu, X.H.; Chen, Z. A mechanically robust transparent coating for anti-icing and self-cleaning applications. J. Mater. Chem. A 2018, 6, 16043. [Google Scholar] [CrossRef]
- Phan, N.; Moronuki, N. Fabrication of high aspect ratio silicon micro-/nano-pore arrays and surface modification aiming at long lifetime liquid-infused-type self-cleaning function. J. Adv. Mech. Des. Syst. Manuf. 2017, 11, JAMDSM0013. [Google Scholar] [CrossRef]
- Ma, Q.; Wang, W.; Dong, G.N. Facile fabrication of biomimetic liquid-infused slippery surface on carbon steel and its self-cleaning, anti-corrosion, anti-frosting and tribological properties. Colloids Surf. A Physicochem. Eng. Asp. 2019, 577, 17. [Google Scholar] [CrossRef]
- Luo, H.; Lu, Y.; Yin, S.H.; Huang, S.; Song, J.L.; Chen, F.Z.; Chen, F.J.; Carmalt, C.J.; Parkin, I.P. Robust platform for water harvesting and directional transport. J. Mater. Chem. A 2018, 6, 5635. [Google Scholar] [CrossRef]
- Ahn, J.; Jeon, J.; Heu, C.S.; Kim, D.R. Three-Dimensionally Programmed Slippery Wrinkles with High Stretchability for Tunable Functionality of Icephobicity and Effective Water Harvesting. Adv. Mater. Interfaces 2018, 5, 1800980. [Google Scholar] [CrossRef]
- Jing, X.; Guo, Z. Durable Lubricant-Impregnated Surfaces for Water Collection under Extremely Severe Working Conditions. ACS Appl. Mater. Interfaces 2019, 11, 35949. [Google Scholar] [CrossRef]
- Lee, S.J.; Kim, H.N.; Choi, W.; Yoon, G.Y.; Seo, E. A nature-inspired lubricant-infused surface for sustainable drag reduction. Soft Matter 2019, 15, 8459. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Cartagena, E.J.; Arenas, I.; An, J.; Leonardi, S. Dependence of the drag over superhydrophobic and liquid infused surfaces on the asperities of the substrate. Phys. Rev. Fluid 2019, 4, 114609. [Google Scholar] [CrossRef]
- Van Buren, T.; Smits, A.J. Substantial drag reduction in turbulent flow using liquid-infused surfaces. J. Fluid Mech. 2017, 827, 448. [Google Scholar] [CrossRef]
- Fu, M.K.; Arenas, I.; Leonardi, S.; Hultmark, M. Liquid-infused surfaces as a passive method of turbulent drag reduction. J. Fluid Mech. 2017, 824, 688. [Google Scholar] [CrossRef]
- Chang, J.; Jung, T.; Choi, H.; Kim, J. Predictions of the effective slip length and drag reduction with a lubricated micro-groove surface in a turbulent channel flow. J. Fluid Mech. 2019, 874, 797. [Google Scholar] [CrossRef]
- Cartagena, E.J.G.; Arenas, I.; Bernardini, M.; Leonardi, S. Dependence of the Drag Over Super Hydrophobic and Liquid Infused Surfaces on the Textured Surface and Weber Number. Flow Turbul. Combust. 2018, 100, 945. [Google Scholar] [CrossRef]
- Preston, D.J.; Lu, Z.; Song, Y.; Zhao, Y.; Wilke, K.L.; Antao, D.S.; Louis, M.; Wang, E.N. Heat Transfer Enhancement During Water and Hydrocarbon Condensation on Lubricant Infused Surfaces. Sci. Rep. 2018, 8, 540. [Google Scholar] [CrossRef]
- Tsuchiya, H.; Tenjimbayashi, M.; Moriya, T.; Yoshikawa, R.; Sasaki, K.; Togasawa, R.; Yamazaki, T.; Manabe, K.; Shiratori, S. Liquid-Infused Smooth Surface for Improved Condensation Heat Transfer. Langmuir 2017, 33, 8950. [Google Scholar] [CrossRef] [PubMed]
- Lv, F.Y.; Zhang, P.; Orejon, D.; Askounis, A.; Shen, B. Heat transfer performance of a lubricant-infused thermosyphon at various filling ratios. Int. J. Heat Mass Transfer 2017, 115, 725. [Google Scholar] [CrossRef]
- Li, J.; Ueda, E.; Paulssen, D.; Levkin, P.A. Slippery Lubricant-Infused Surfaces: Properties and Emerging Applications. Adv. Funct. Mater. 2019, 29, 1802317. [Google Scholar] [CrossRef]
- Villegas, M.; Zhang, Y.; Jarad, N.; Soleymani, L.; Didar, T. Liquid-Infused Surfaces: A Review of Theory, Design and Applications. ACS Nano 2019, 13, 8517. [Google Scholar] [CrossRef]
- Yang, X.; Huang, Y.; Zhao, Y.; Zhang, X.; Wang, J.; Sann, E.E.; Mon, K.H.; Lou, X.; Xia, F. Bioinspired Slippery Lubricant-Infused Surfaces with External Stimuli Responsive Wettability: A Mini Review. Front. Chem. 2019, 7, 826. [Google Scholar] [CrossRef]
- Chen, C.; Huang, Z.; Jiao, Y.; Shi, L.A.; Zhang, Y.; Li, J.; Li, C.; Lv, X.; Wu, S.; Hu, Y.; et al. In Situ Reversible Control between Sliding and Pinning for Diverse Liquids under Ultra-Low Voltage. ACS Nano 2019, 13, 5742. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Zhou, L.; Shi, L.A.; Zhu, S.; Huang, Z.; Xue, C.; Li, J.; Hu, Y.; Wu, D.; Chu, J. Ultralow-Voltage-Driven Smart Control of Diverse Drop’s Anisotropic Sliding by in Situ Switching Joule Heat on Paraffin-Infused Microgrooved Slippery Surface. ACS Appl. Mater. Interfaces 2020, 12, 1895. [Google Scholar] [CrossRef]
- Gao, C.L.; Wang, L.; Lin, Y.C.; Li, J.T.; Liu, Y.F.; Li, X.; Feng, S.L.; Zheng, Y.M. Droplets Manipulated on Photothermal Organogel Surfaces. Adv. Funct. Mater. 2018, 28, 1803072. [Google Scholar] [CrossRef]
- Gao, W.; Wang, J.; Zhang, X.X.; Sun, L.Y.; Chen, Y.P.; Zhao, Y.J. Electric-tunable wettability on a paraffin-infused slippery pattern surface. Chem. Eng. J. 2020, 381, 122612. [Google Scholar] [CrossRef]
- Li, Q.; Wu, D.; Guo, Z. Drop/bubble transportation and controllable manipulation on patterned slippery lubricant infused surfaces with tunable wettability. Soft Matter 2019, 15, 6803. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Gao, W.; Zhang, H.; Zou, M.; Chen, Y.; Zhao, Y. Programmable wettability on photocontrolled graphene film. Sci. Adv. 2018, 4, eaat7392. [Google Scholar] [CrossRef] [PubMed]
- Wu, D.Q.; Ma, L.W.; Zhang, F.; Qian, H.C.; Minhas, B.; Yang, Y.M.; Han, X.; Zhang, D.W. Durable deicing lubricant-infused surface with photothermally switchable hydrophobic/slippery property. Mater. Des. 2020, 185, 108236. [Google Scholar] [CrossRef]
- Kamei, J.; Yabu, H. On-Demand Liquid Transportation using Bioinspired Omniphobic Lubricated Surfaces based on Self-Organized Honeycomb and Pincushion Films. Adv. Funct. Mater. 2015, 25, 4195. [Google Scholar] [CrossRef]
- Guo, P.; Wang, Z.B.; Heng, L.P.; Zhang, Y.Q.; Wang, X.; Jiang, L. Magnetocontrollable Droplet and Bubble Manipulation on a Stable Amphibious Slippery Gel Surface. Adv. Funct. Mater. 2019, 29, 1808717. [Google Scholar] [CrossRef]
- Rao, Q.Q.; Li, A.; Zhang, J.W.; Jiang, J.X.; Zhang, Q.H.; Zhan, X.L.; Chen, F.Q. Multi-functional fluorinated ionic liquid infused slippery surfaces with dual-responsive wettability switching and self-repairing. J. Mater. Chem. A 2019, 7, 2172. [Google Scholar] [CrossRef]
- Cao, J.P.; An, Q.; Liu, Z.P.; Jin, M.L.; Yan, Z.B.; Lin, W.J.; Chen, L.; Li, P.F.; Wang, X.; Zhou, G.F.; et al. Electrowetting on liquid-infused membrane for flexible and reliable digital droplet manipulation and application. Sens. Actuators B Chem. 2019, 291, 470. [Google Scholar] [CrossRef]
- Oh, I.; Keplinger, C.; Cui, J.X.; Chen, J.H.; Whitesides, G.M.; Aizenberg, J.; Hu, Y.H. Dynamically Actuated Liquid-Infused Poroelastic Film with Precise Control over Droplet Dynamics. Adv. Funct. Mater. 2018, 28, 1802632. [Google Scholar] [CrossRef]
- Wang, J.; Sun, L.; Zou, M.; Gao, W.; Liu, C.; Shang, L.; Gu, Z.; Zhao, Y. Bioinspired shape-memory graphene film with tunable wettability. Sci. Adv. 2017, 3, e1700004. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiao, Y.; Chen, C.; Zhu, S.; Li, C.; Li, J.; Hu, Y.; Wu, D.; Chu, J. Reversible Tuning between Isotropic and Anisotropic Sliding by One-Direction Mechanical Stretching on Microgrooved Slippery Surfaces. Langmuir 2019, 35, 10625. [Google Scholar] [CrossRef]
- Guo, J.; Wang, D.; Sun, Q.; Li, L.; Zhao, H.; Wang, D.; Cui, J.; Chen, L.; Deng, X. Omni-Liquid Droplet Manipulation Platform. Adv. Mater. Interfaces 2019, 6, 1900653. [Google Scholar] [CrossRef]
- Luo, J.T.; Geraldi, N.R.; Guan, J.H.; McHale, G.; Wells, G.G.; Fu, Y.Q. Slippery Liquid-Infused Porous Surfaces and Droplet Transportation by Surface Acoustic Waves. Phys. Rev. Appl. 2017, 7, 014017. [Google Scholar] [CrossRef]
- Wu, S.; Zhou, L.; Chen, C.; Shi, L.A.; Zhu, S.; Zhang, C.; Meng, D.; Huang, Z.; Li, J.; Hu, Y.; et al. Photothermal Actuation of Diverse Liquids on an Fe3O4-Doped Slippery Surface for Electric Switching and Cell Culture. Langmuir 2019, 35, 13915. [Google Scholar] [CrossRef]
- Agrawal, P.; Salomons, T.T.; Chiriac, D.S.; Ross, A.C.; Oleschuk, R.D. Facile Actuation of Organic and Aqueous Droplets on Slippery Liquid-Infused Porous Surfaces for the Application of On-Chip Polymer Synthesis and Liquid-Liquid Extraction. ACS Appl. Mater. Interfaces 2019, 11, 28327. [Google Scholar] [CrossRef] [PubMed]
- Smith, J.D.; Dhiman, R.; Anand, S.; Reza-Garduno, E.; Cohen, R.E.; McKinley, G.H.; Varanasi, K.K. Droplet mobility on lubricant-impregnated surfaces. Soft Matter 2013, 9, 1772. [Google Scholar] [CrossRef]
- Bjelobrk, N.; Girard, H.L.; Subramanyam, S.B.; Kwon, H.M.; Quere, D.; Varanasi, K.K. Thermocapillary motion on lubricant-impregnated surfaces. Phys. Rev. Fluid 2016, 1, 063902. [Google Scholar] [CrossRef]
- Yao, X.; Ju, J.; Yang, S.; Wang, J.; Jiang, L. Temperature-driven switching of water adhesion on organogel surface. Adv. Mater. 2014, 26, 1895. [Google Scholar] [CrossRef]
- Wang, B.L.; Heng, L.; Jiang, L. Temperature-Responsive Anisotropic Slippery Surface for Smart Control of the Droplet Motion. ACS Appl. Mater. Interfaces 2018, 10, 7442. [Google Scholar] [CrossRef]
- Liu, C.H.; Ding, H.B.; Wu, Z.Q.; Gao, B.B.; Fu, F.F.; Shang, L.R.; Gu, Z.Z.; Zhao, Y.J. Tunable Structural Color Surfaces with Visually Self-Reporting Wettability. Adv. Funct. Mater. 2016, 26, 7937. [Google Scholar] [CrossRef]
- Wang, Y.; Qian, B.; Lai, C.; Wang, X.; Ma, K.; Guo, Y.; Zhu, X.; Fei, B.; Xin, J.H. Flexible Slippery Surface to Manipulate Droplet Coalescence and Sliding, and its Practicability in Wind-Resistant Water Collection. ACS Appl. Mater. Interfaces 2017, 9, 24428. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.B.; Heng, L.P.; Jiang, L. Effect of lubricant viscosity on the self-healing properties and electrically driven sliding of droplets on anisotropic slippery surfaces. J. Mater. Chem. A 2018, 6, 3414. [Google Scholar] [CrossRef]
- Che, P.D.; Heng, L.P.; Jiang, L. Lubricant-Infused Anisotropic Porous Surface Design of Reduced Graphene Oxide Toward Electrically Driven Smart Control of Conductive Droplet’s Motion. Adv. Funct. Mater. 2017, 27, 1606199. [Google Scholar] [CrossRef]
- Guo, T.; Che, P.; Heng, L.; Fan, L.; Jiang, L. Anisotropic Slippery Surfaces: Electric-Driven Smart Control of a Drop’s Slide. Adv. Mater. 2016, 28, 6999. [Google Scholar] [CrossRef]
- Wang, Z.B.; Liu, Y.; Guo, P.; Heng, L.P.; Jiang, L. Photoelectric Synergetic Responsive Slippery Surfaces based on Tailored Anisotropic Films Generated by Interfacial Directional Freezing. Adv. Funct. Mater. 2018, 28, 18001310. [Google Scholar] [CrossRef]
- Tian, D.; Zhang, N.; Zheng, X.; Hou, G.; Tian, Y.; Du, Y.; Jiang, L.; Dou, S.X. Fast Responsive and Controllable Liquid Transport on a Magnetic Fluid/Nanoarray Composite Interface. ACS Nano 2016, 10, 6220. [Google Scholar] [CrossRef]
- Wang, J.; Huang, Y.; You, K.; Yang, X.; Song, Y.; Zhu, H.; Xia, F.; Jiang, L. Temperature-Driven Precise Control of Biological Droplet’s Adhesion on a Slippery Surface. ACS Appl. Mater. Interfaces 2019, 11, 7591. [Google Scholar] [CrossRef]
- Cao, M.; Jin, X.; Peng, Y.; Yu, C.; Li, K.; Liu, K.; Jiang, L. Unidirectional Wetting Properties on Multi-Bioinspired Magnetocontrollable Slippery Microcilia. Adv. Mater. 2017, 29, 1606869. [Google Scholar] [CrossRef]
- Ma, R.; Zhao, Q.; Zhang, E.; Zheng, D.; Li, W.; Wang, X. Synthesis and evaluation of oil-soluble ionic liquids as multifunctional lubricant additives. Tribol. Int. 2020, 151, 106446. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Lubricant | Mechanism | Response | Control Manner | Advantages | Limitations | Ref |
|---|---|---|---|---|---|---|---|
| Yao et al. | Paraffin | Phase transition of the lubricant | Thermal | Contact | Facile switchable process between low and high adhesion | Ex situ heat source required; not suitable for volatile droplets; non-instant response | [58] |
| Wang et al. | Paraffin | Phase transition of the lubricant | Thermal | Contact | Facile switchable process for directional control droplet | Ex situ heat source required; high-energy consumed; non-instant response | [59] |
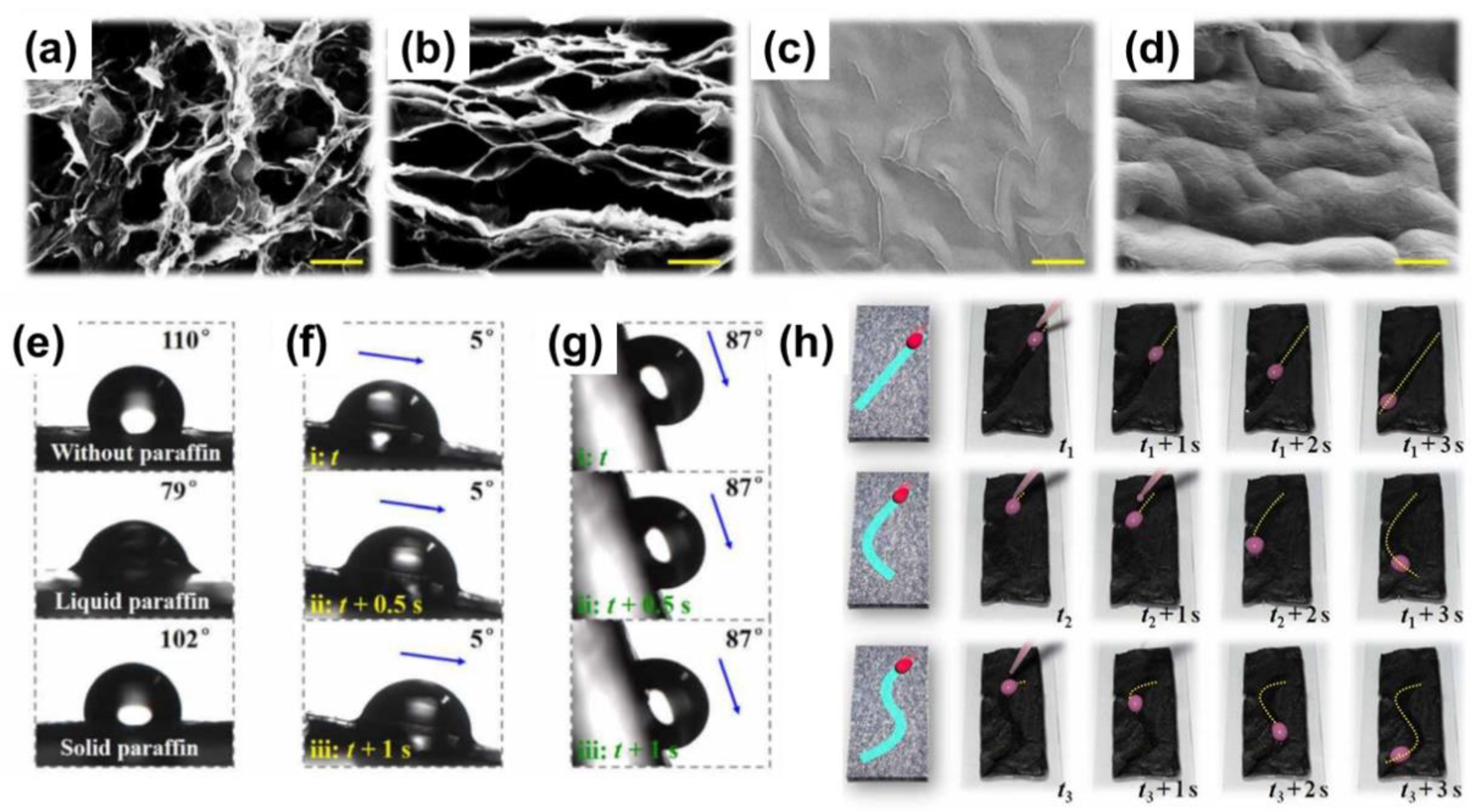
| Chen et al. | Paraffin | Phase transition of the lubricant | Electrically thermal | Contactless | Directional control diverse droplet by in situ heating; remote droplet control | Not suitable for volatile droplets; non-instant response. | [39] |
| Gao et al. | Paraffin | Phase transition of the lubricant | Electrically thermal | Contactless | Directional diverse droplet control by in situ heating; remote droplet control | Easy volatilization of droplets; non-instant response. | [41] |
| Chen et al. | Paraffin | Phase transition of the lubricant | Electrically thermal | Contactless | Directional control droplet by in situ heating; remote droplet control | Easy volatilization of droplets; non-instant response. | [38] |
| Wang et al. | Paraffin | Phase transition of the lubricant | Photothermal (NIR) | Remote contactless | Noncontact regulation; spatial and temporal droplet control | Easy volatilization of droplets; non-instant response. | [43] |
| Wu et al. | Cocoa oil | Phase transition of the lubricant | Photothermal (IR) | Remote contactless | Noncontact regulation; spatial and temporal droplet control | Easy volatilization of droplets; non-instant response. | [44] |
| Li et al. | Paraffin | Phase transition of the lubricant | Photothermal (NIR) | Remote contactless | Directional droplet manipulation according to the patterned pathway. | Easy volatilization of droplets; non-instant response. | [42] |
| Rao et al. | Fluorinated ionic liquids | Phase transition of the lubricant | Photothermal (Sunlamp) and magnetic-thermal | Remote contactless | Dual responsive source applicable in complex environments | Small range of material selection; complex fabrication | [47] |
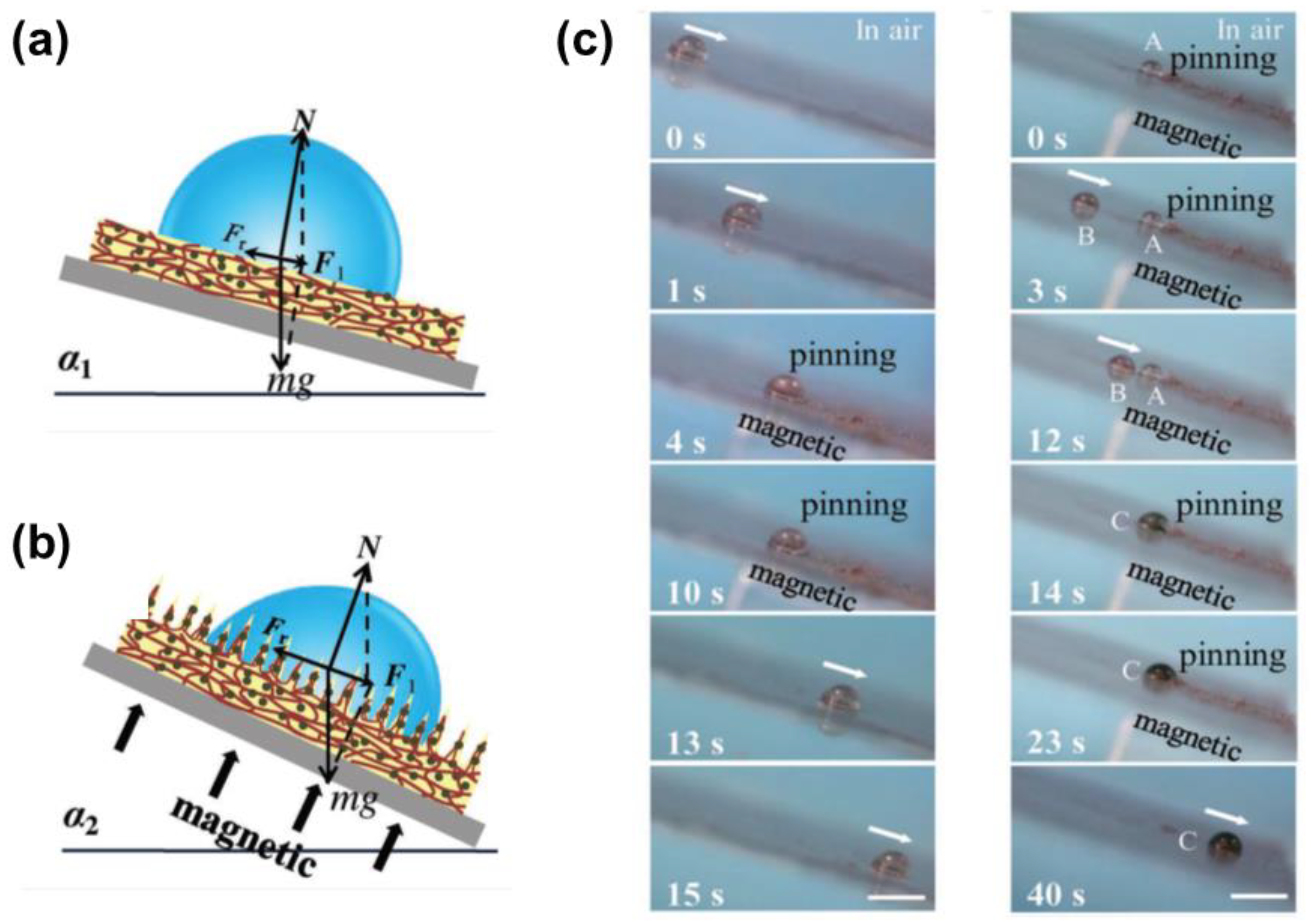
| Guo et al. | Silicone oil | Switchable regulation of protrusions | Magnetic | Contactless | Long operation time; excellent stability in air and underwater; | Limited well-organized microstructure; easy destruction of the soft substrate. | [46] |
| Kamei et al. | Fluorinated lubricant | Switchable regulation of the lubricant layer | Mechanical | Contact | Tunable, programmed repellency; spatiotemporal on-demand droplet manipulation | Poor strength and aging performance of substrates; requirement of sustained forces | [45] |
| Liu et al. | Krytox 103 | Switchable regulation of the lubricant layer | Mechanical | Contact | Fast response; self-reporting; real-time monitoring wettability | Low robust-ness; requirement of sustained forces | [60] |
| Wang et al. | perfluoropolyether | Switchable regulation of the lubricant layer | Mechanical (wind) | Contactless | Fast response; wind blowing resistance of droplet | Not resistant to strong polar, acid and alkali droplets | [61] |
| Zhang et al. | Silicone oil | Switchable regulation of the lubricant layer | Mechanical | Contact | Fast response; facile fabrication; isotropic and anisotropic directional droplet manipulation | Low robustness; requirement of sustained forces | [51] |
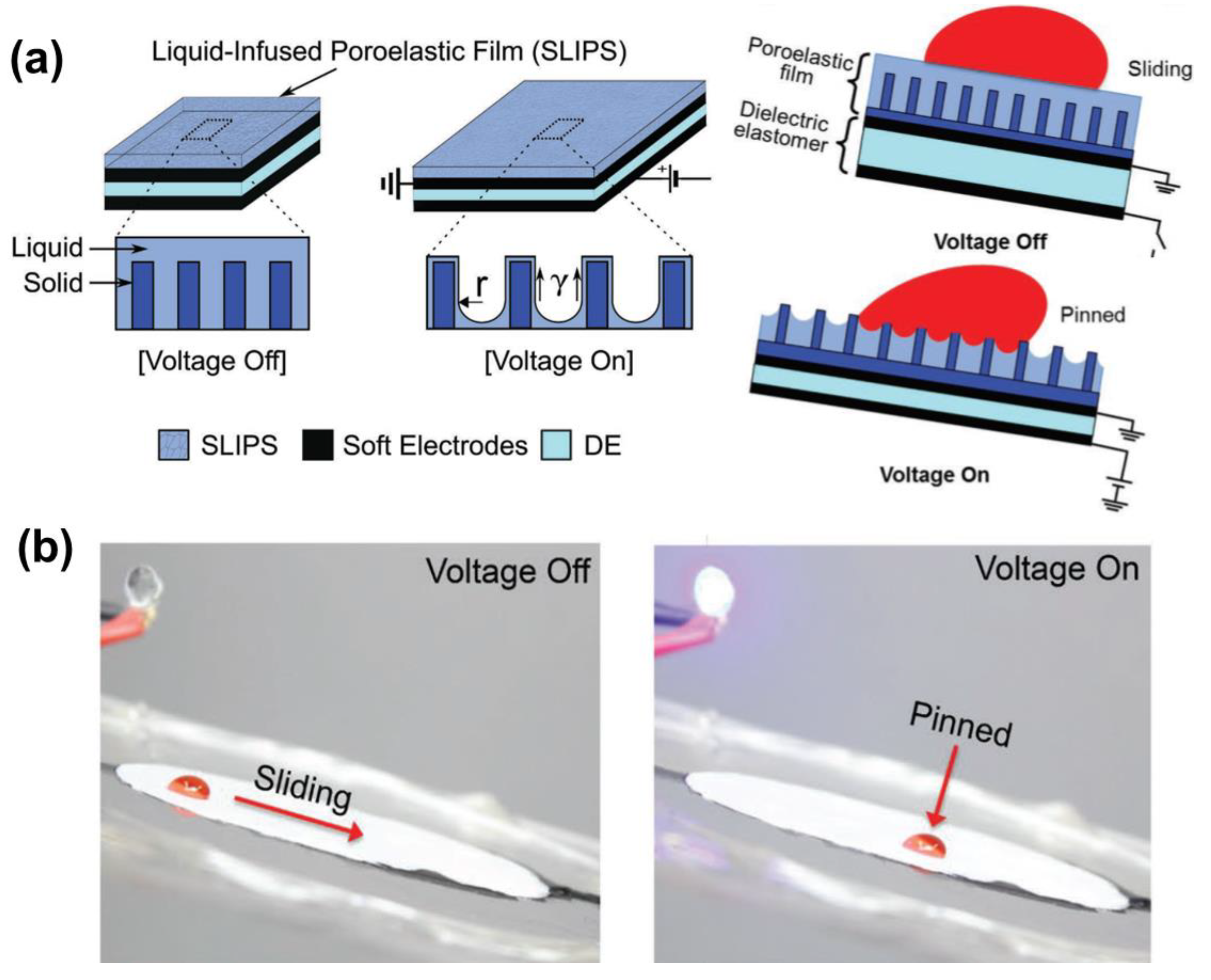
| Oh et al. | Silicone oil | Switchable regulation of the lubricant layer | Electro-mechanical | Contactless | Multiple droplet behaviors manipulation (pinning, free sliding, repetitive stick–slip motions, extremely fast sliding, droplet oscillation, jetting, and mixing, | Extreme high voltage input | [49] |
| Wang et al. | Perfluorooctyl trichlorosilane | Switchable regulation of the lubricant layer | thermomechanical | Contactless | Flexible operation of stretching the films; low voltage input | Small range of material selection | [50] |
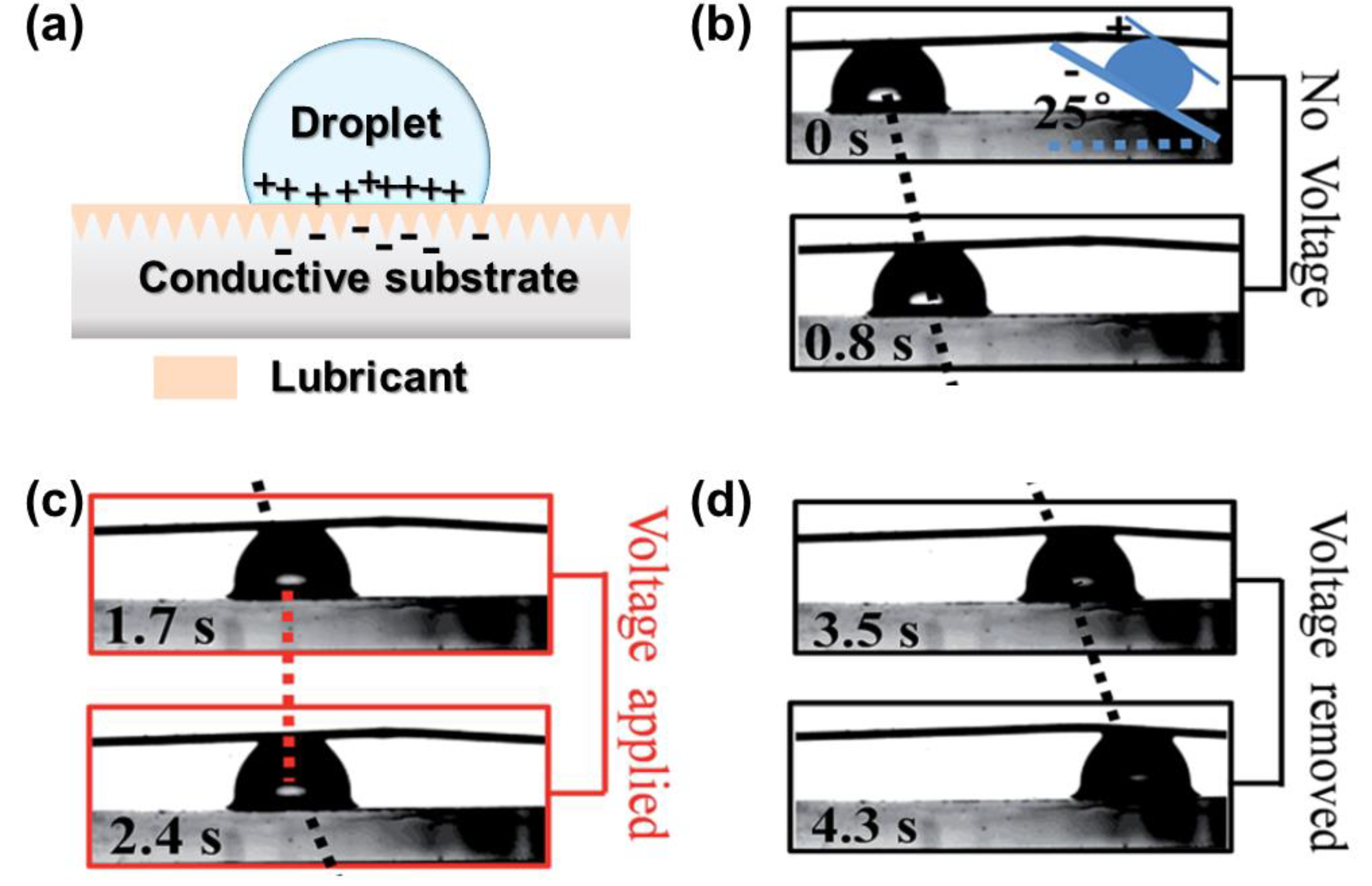
| Wang et al. | Silicone oil | Electrostatic attraction | Electric | Contactless | Instant response; tunable, programmed, on-demand droplet manipulation | A high dielectric constant is required. Only conductive substrate and droplet applicable | [62] |
| Cao et al. | Silicone oil | Wettability control | Electric | Contactless | Strong driving force; fast response | Only conductive substrate and droplet applicable | [48] |
| Che et al. | Silicone oil | Electrostatic attraction | Electric | Contactless | Tunable, programmed, on-demand directional droplet manipulation | Only conductive substrate and droplet applicable | [63] |
| Guo et al. | Silicone oil | Electrostatic attraction | Electric | Contactless | Directional droplet manipulation; instant response | Only conductive substrate and droplet applicable; harsh fabrication process; | [64] |
| Wang et al. | Silicone oil | Electrostatic attraction | Photoelectric | Remote contactless | Dual responsive remote droplet control | Only conductive substrate and droplet applicable | [65] |
| Wu et al. | Silicone oil | Wettability control | Photothermal | Remote contactless | Facile approach and droplet manipulation in arbitrary directions | Not applicable for high-viscosity droplets | [54] |
| Tian et al. | Silicone oil | Wettability control | Magnetic | Contactless | Fast response rate; controllable transport speed and direction | Fragile characteristics and easy damage of surface patterns; | [66] |
| Guo et al. | Fluorinated oils | Fast concaving under a magnetic field to transport the droplet. | Magnetic | Contactless | Suitable for sensitive droplets. rapid, reversible, and precise all types of droplets manipulation | Poor practical operability: a magnet probe required for indirect droplet manipulation; | [52] |
| Wang et al. | n-dodecane | Molecular configuration reversible deformation | Thermal | Contact | Facile process; even a general LIS applicable | Only a small part of biological droplet with a small application range | [67] |
| Luo et al. | Silicone oil | Momentum transfer | Mechanical | Contact | Tunable frequency response; precise droplet manipulation | Instability of the integrated LIS liquids with a low surface tension | [53] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, Z.; Li, W. A Review of Smart Lubricant-Infused Surfaces for Droplet Manipulation. Nanomaterials 2021, 11, 801. https://doi.org/10.3390/nano11030801
Hao Z, Li W. A Review of Smart Lubricant-Infused Surfaces for Droplet Manipulation. Nanomaterials. 2021; 11(3):801. https://doi.org/10.3390/nano11030801
Chicago/Turabian StyleHao, Zhentao, and Weihua Li. 2021. "A Review of Smart Lubricant-Infused Surfaces for Droplet Manipulation" Nanomaterials 11, no. 3: 801. https://doi.org/10.3390/nano11030801
APA StyleHao, Z., & Li, W. (2021). A Review of Smart Lubricant-Infused Surfaces for Droplet Manipulation. Nanomaterials, 11(3), 801. https://doi.org/10.3390/nano11030801