
Analysing the Influential Parameters on the Monopile Foundation of an Offshore Wind Turbine

 ,
, 

Abstract
1. Introduction
2. Materials and Methods
2.1. Design Criteria of Wind Turbine
- The natural frequency is less than the 1P frequency. This range is called the soft–soft field [59]. In this case, the structure is too flexible, and in this range, the frequency might be closer to the waves’ frequency and consequently lead to resonance.
- The natural frequency is higher than the frequency of the 3P blade. This is a stiff–stiff range. This situation leads to a structure that is too rigid. This is unfeasible because the tower would be too heavy and too expensive.
- The natural frequency is between the 1P and 3P frequencies. This is a soft–stiff range. This range is the best design case. The frequency is fairly far from the wave and wind frequencies, and will lead to the best design.
2.2. Geographical Location
2.3. Loads on the Structure
2.3.1. Aerodynamic Loads
2.3.2. Hydrodynamic Loads
2.4. Geometric Features
2.5. The NREL 5MW Turbine
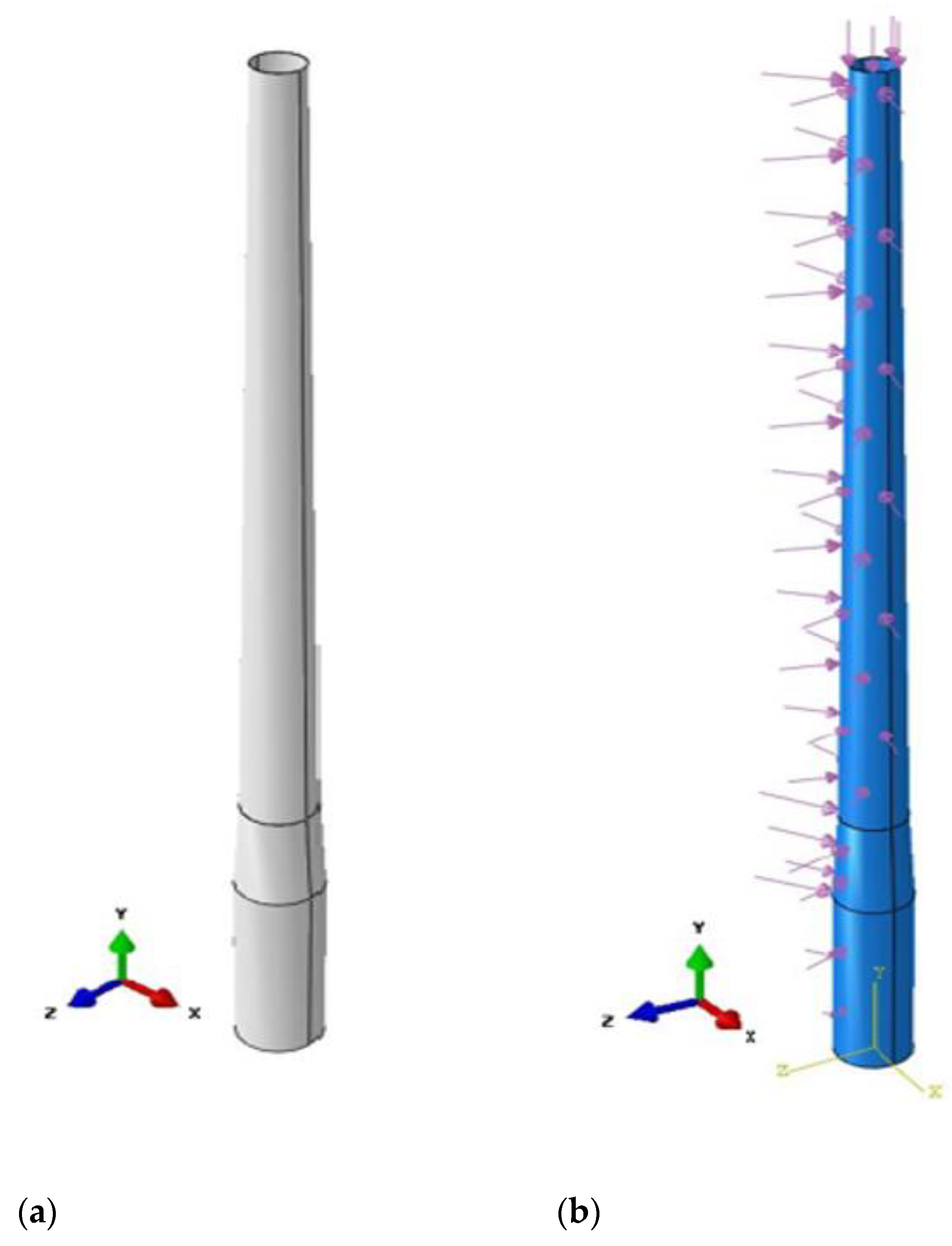
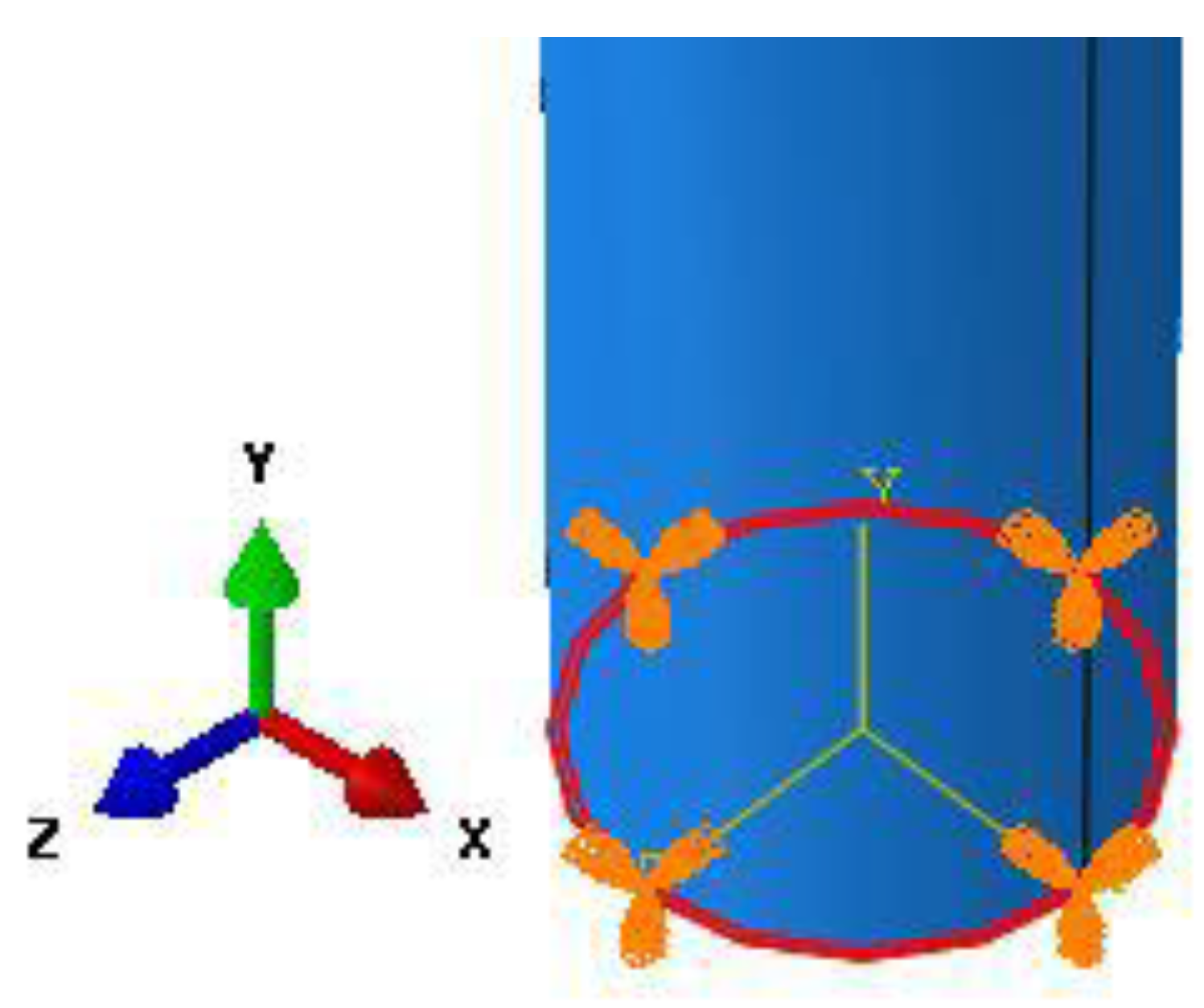
2.6. Design 1: 3D Design without Modelling the Soil
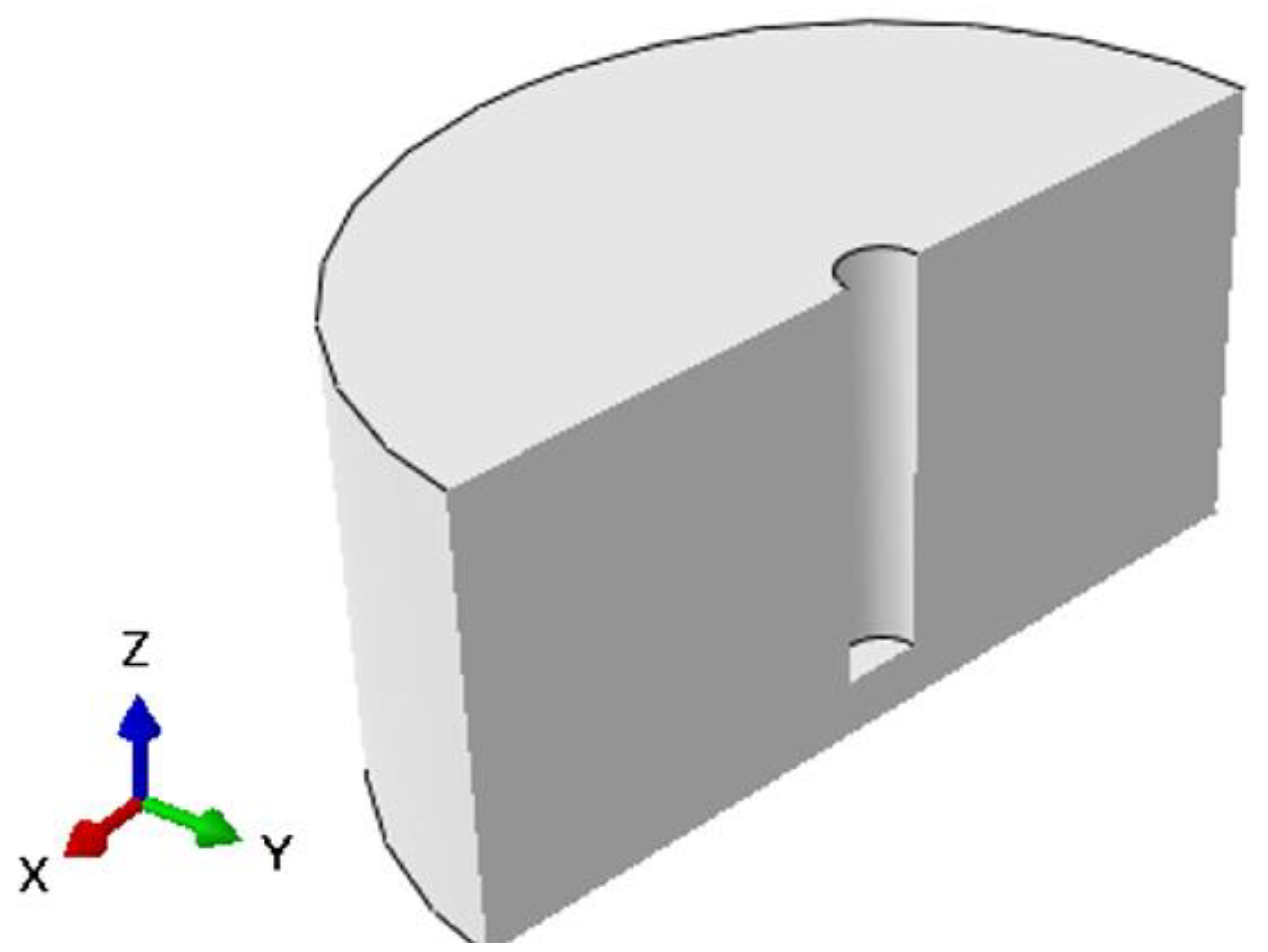
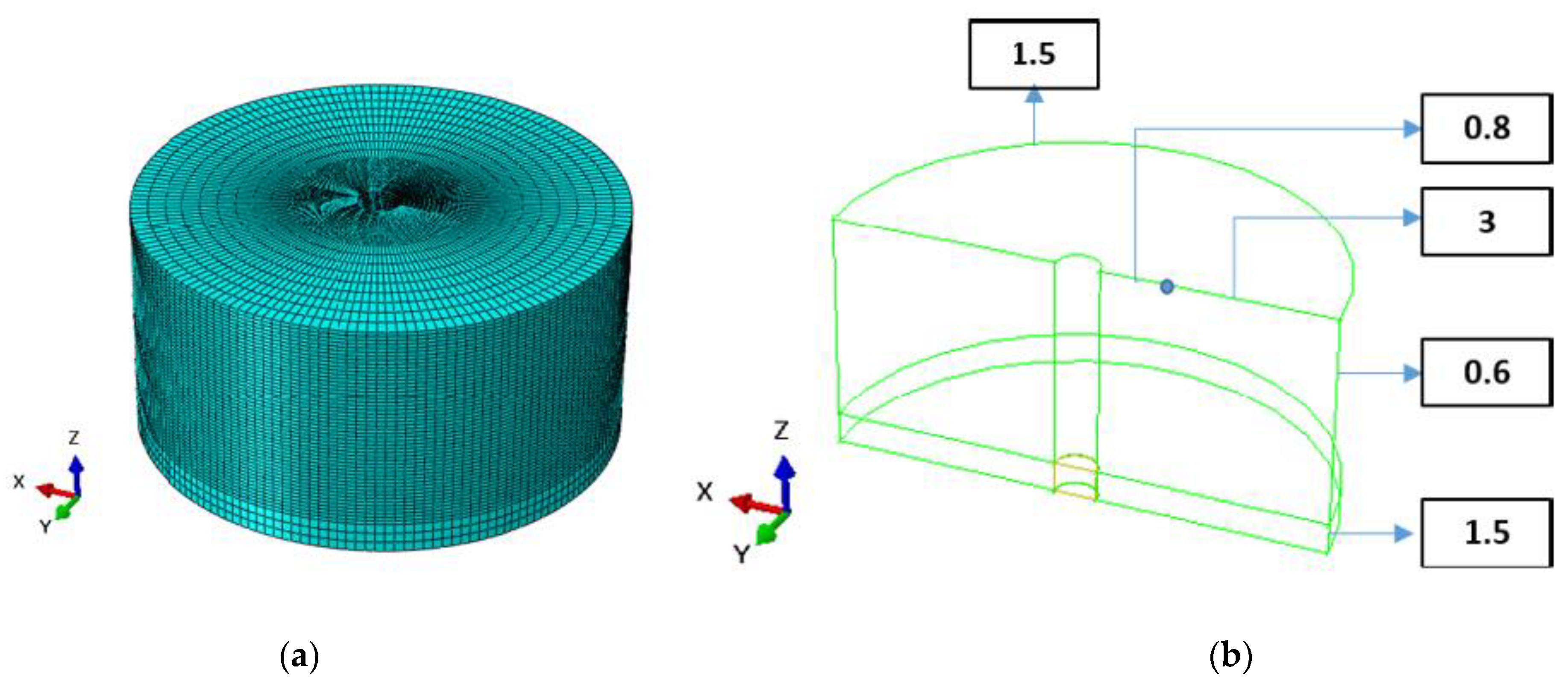
2.7. Design 2: 3D Design with Modelling of the Soil
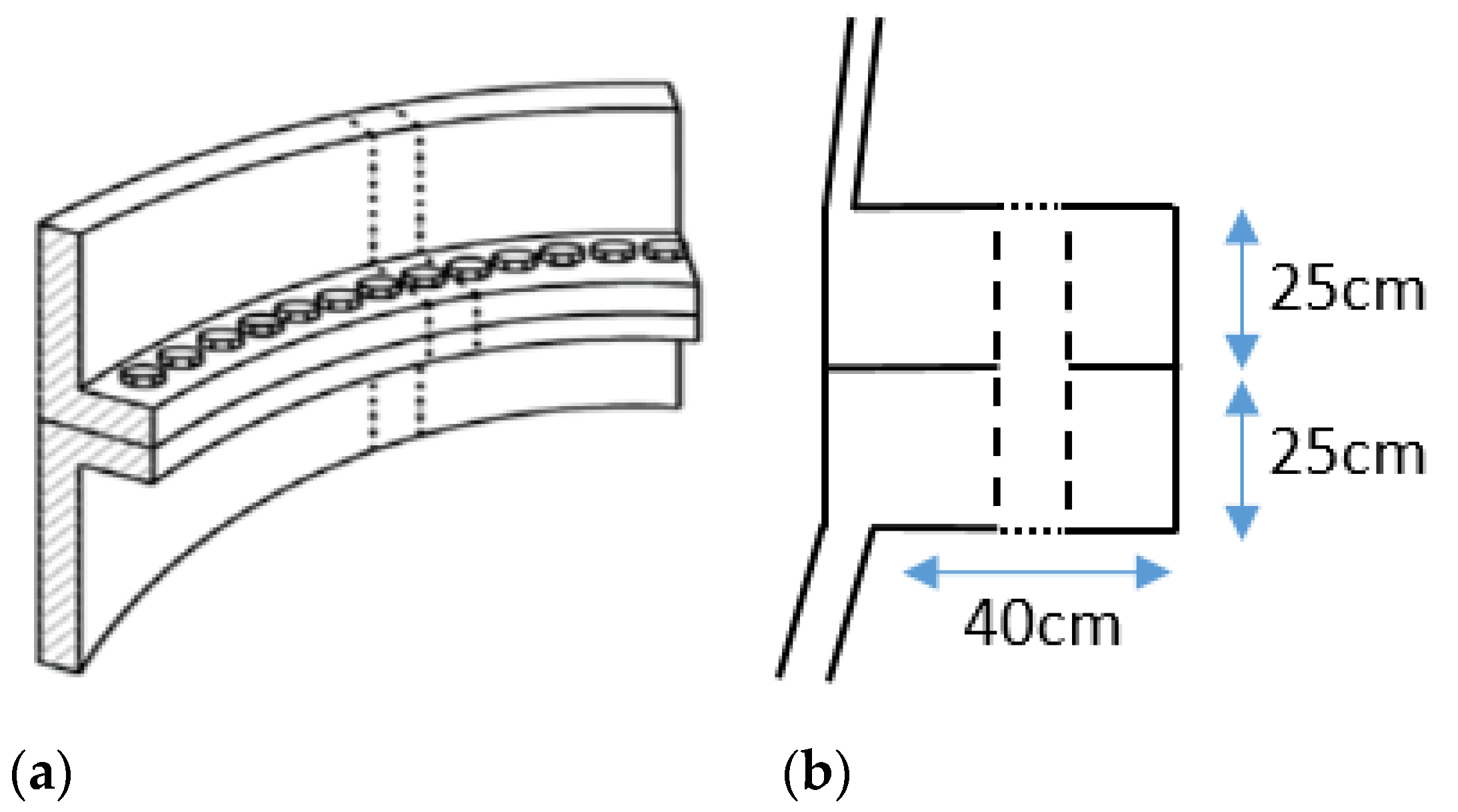
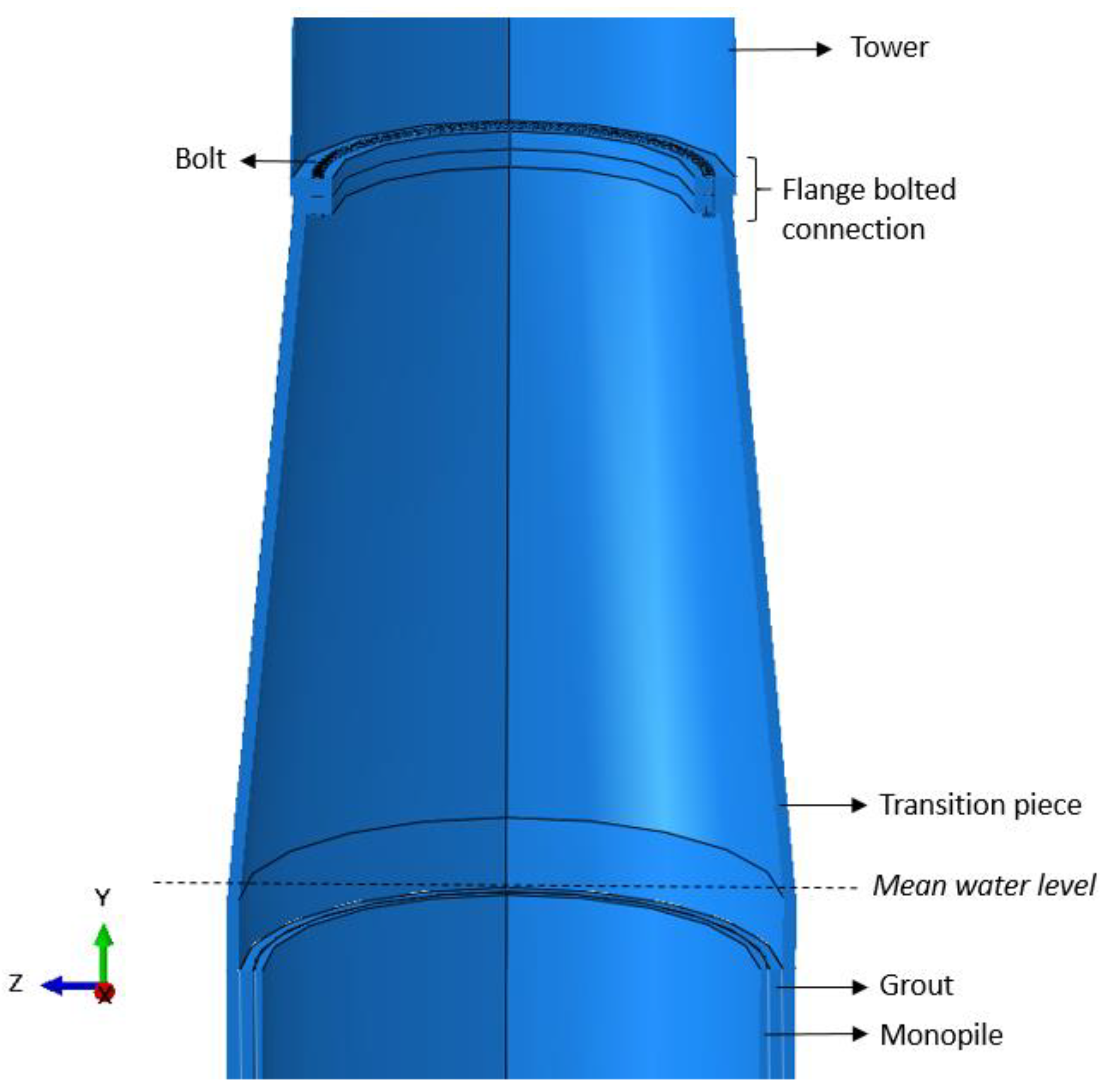
2.8. Design 3: Monopile Detailed Model
3. Results and Discussion
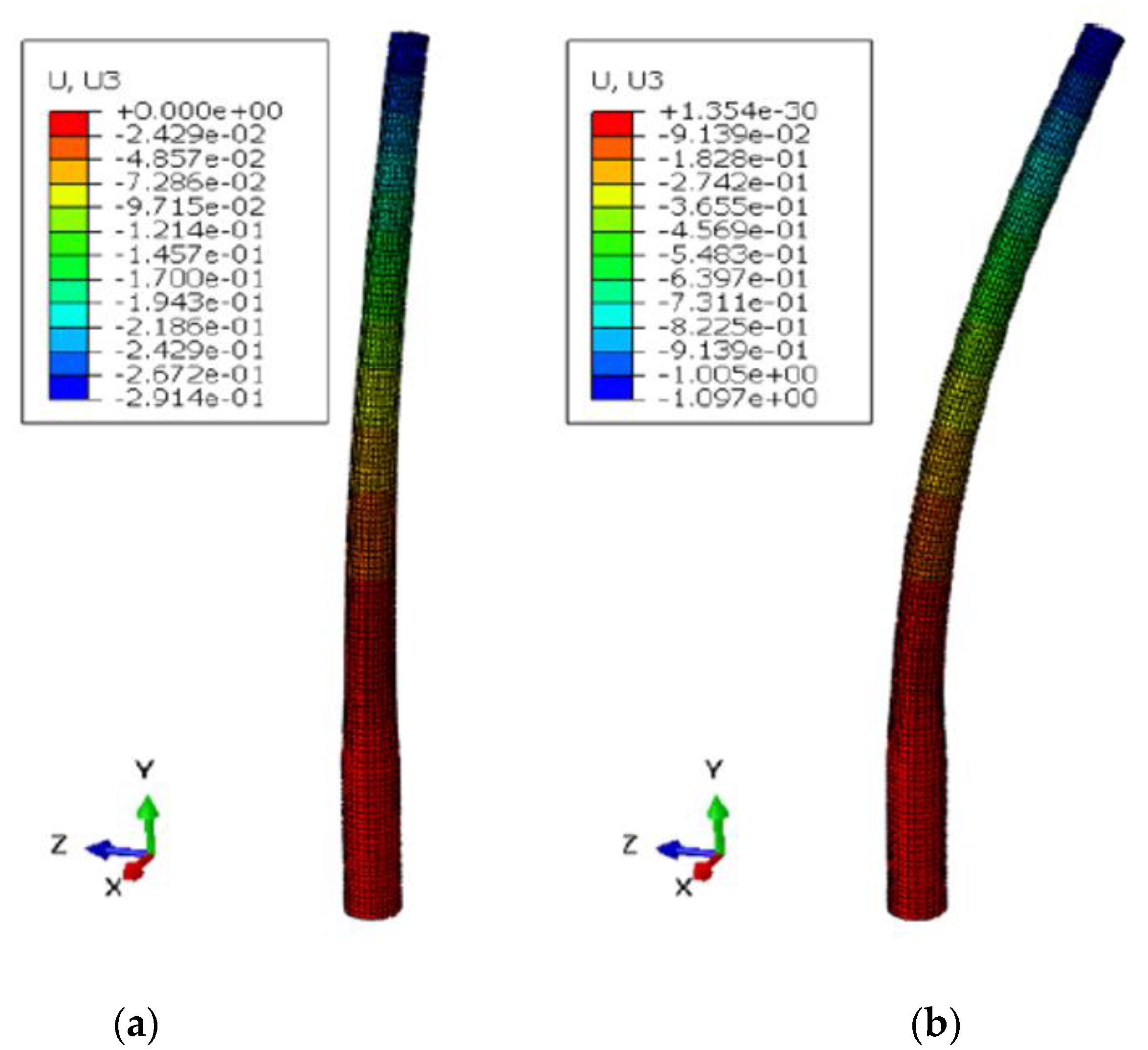
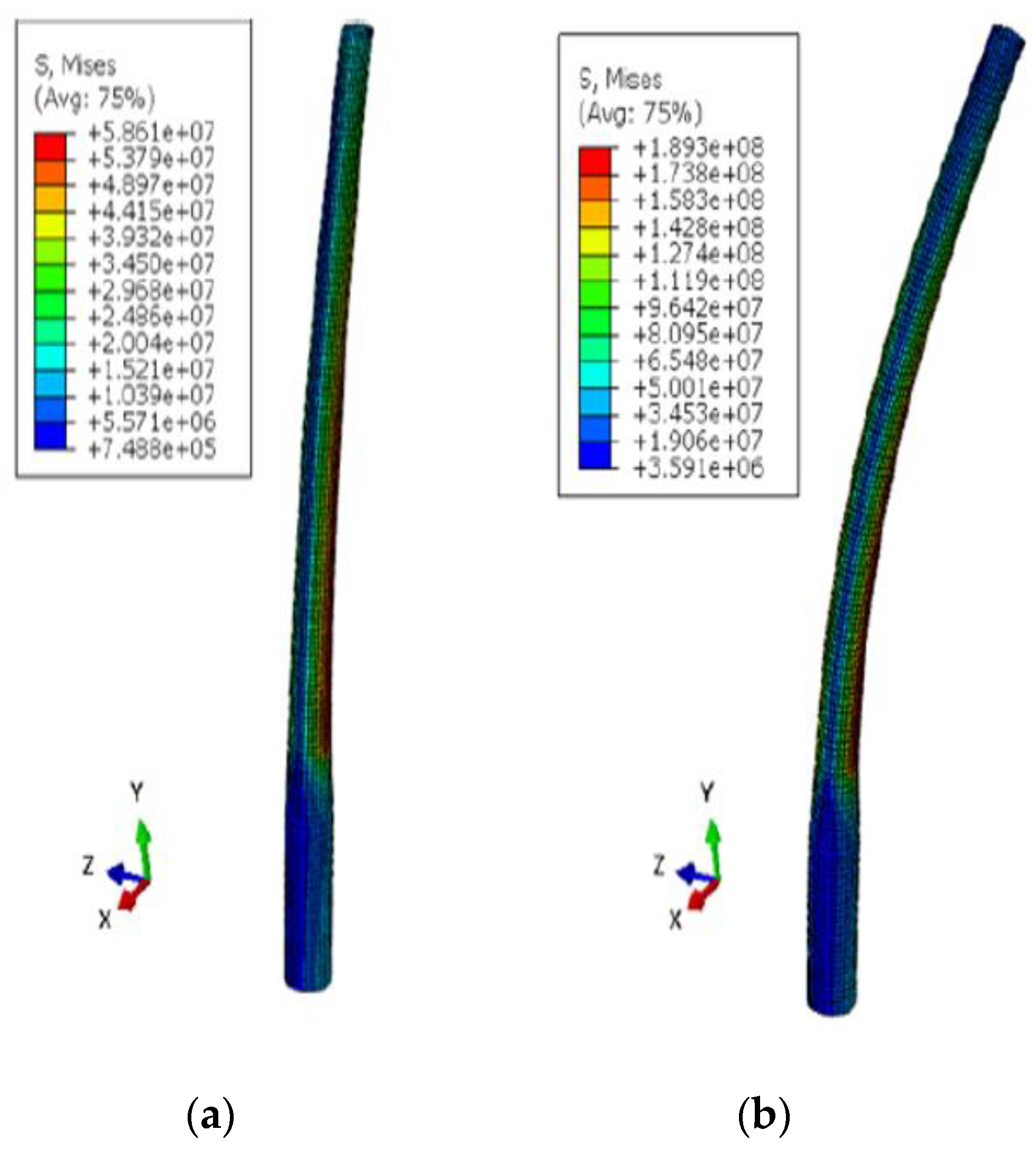
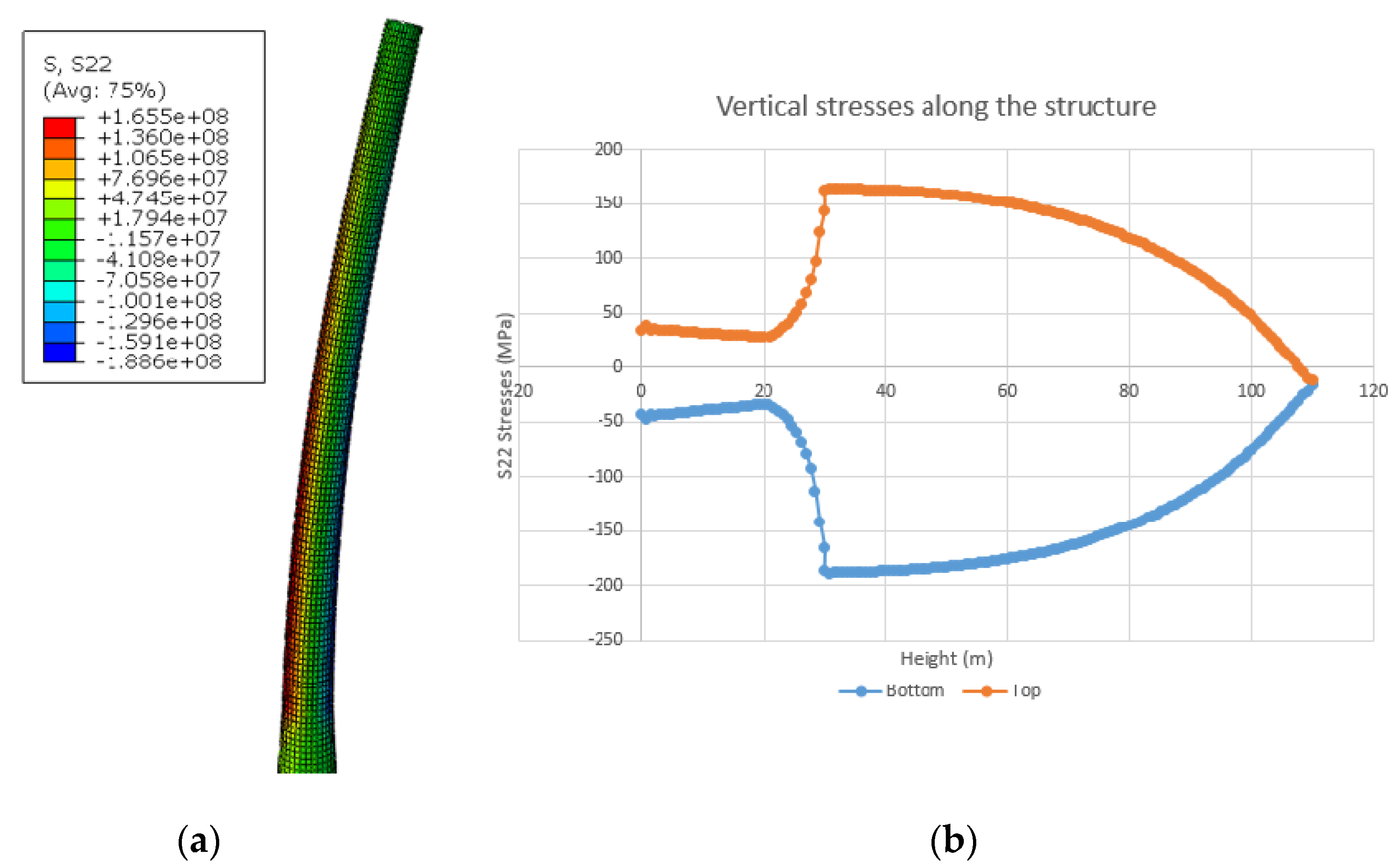
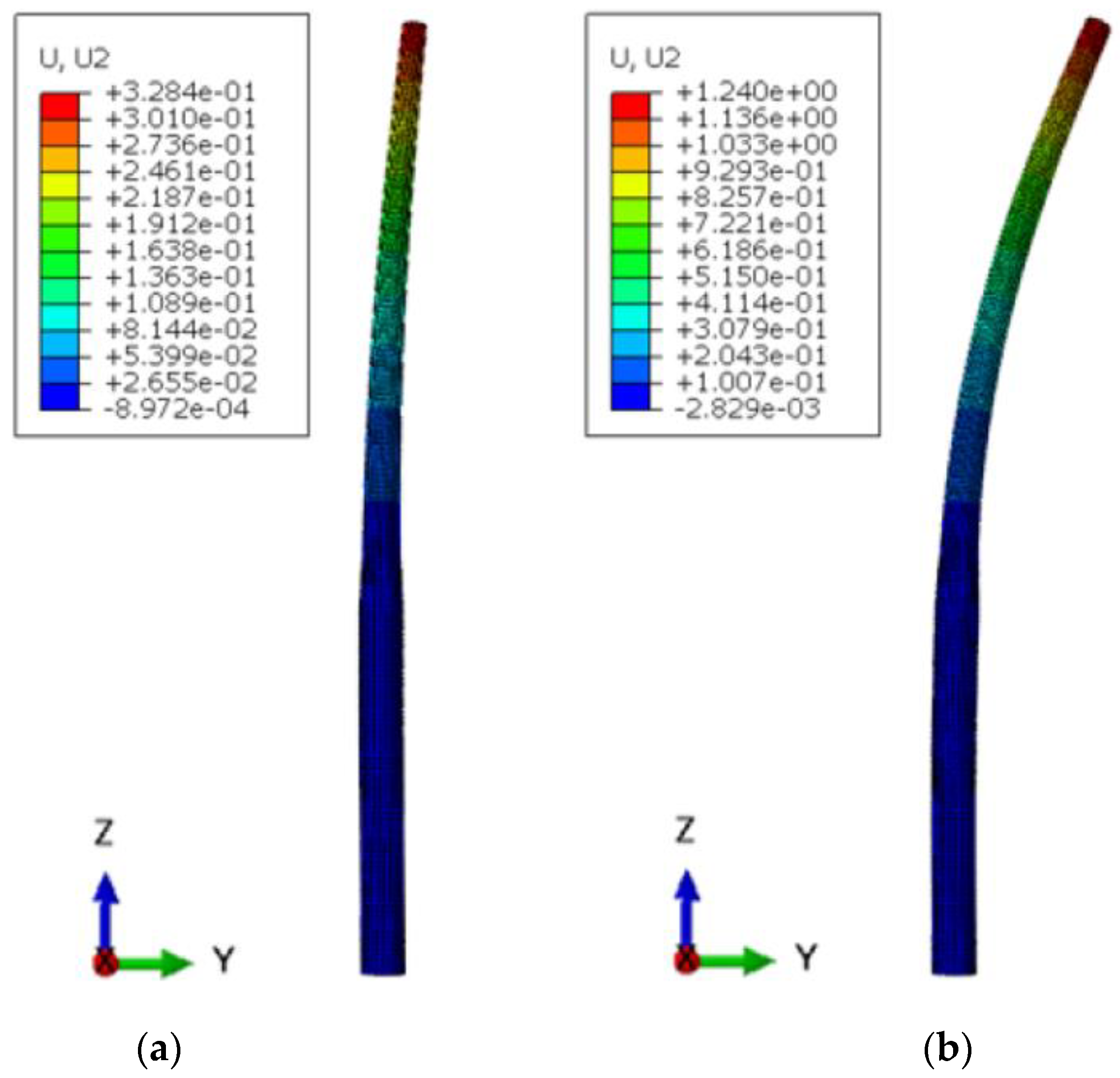
3.1. Design 1 Results
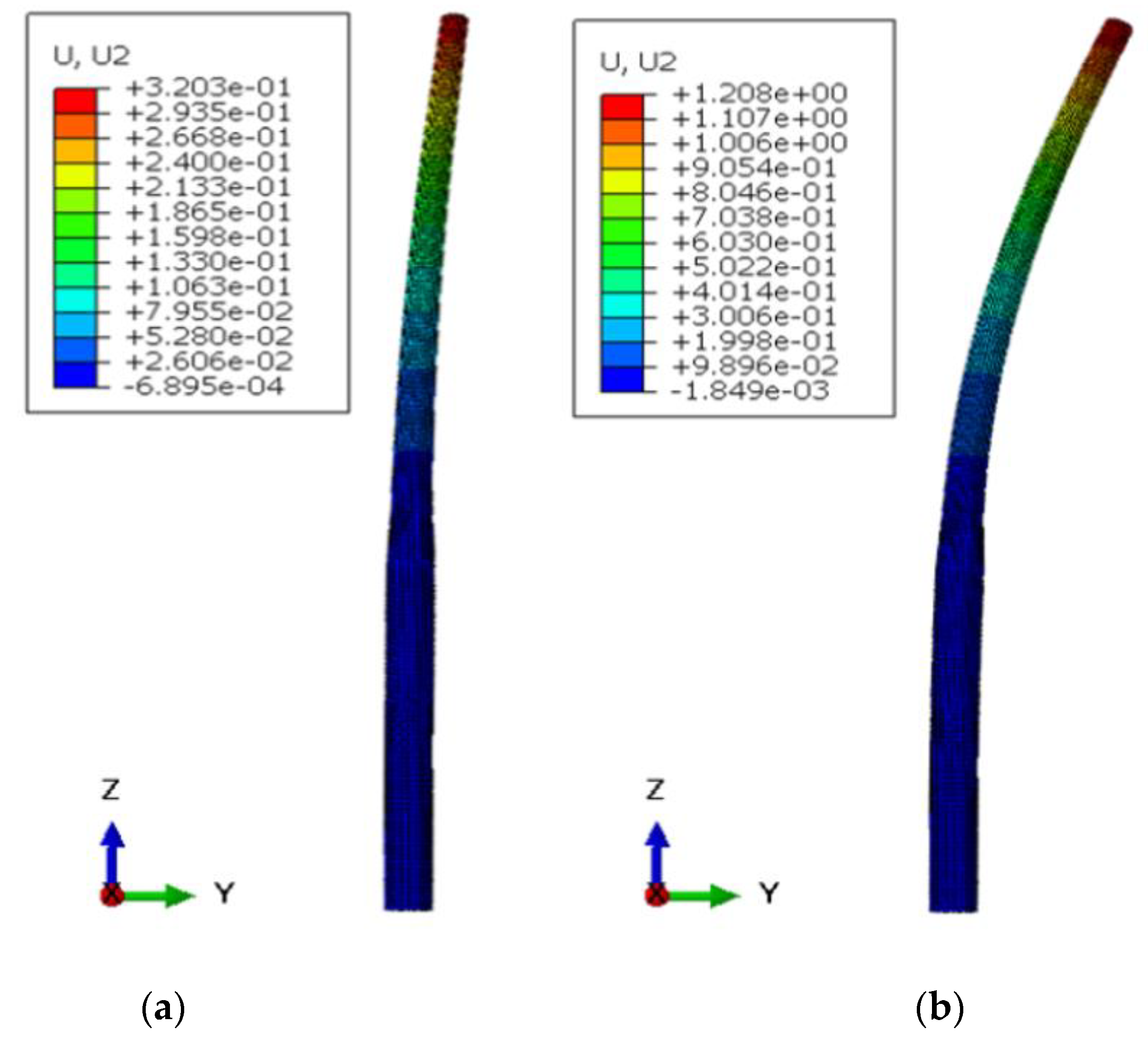
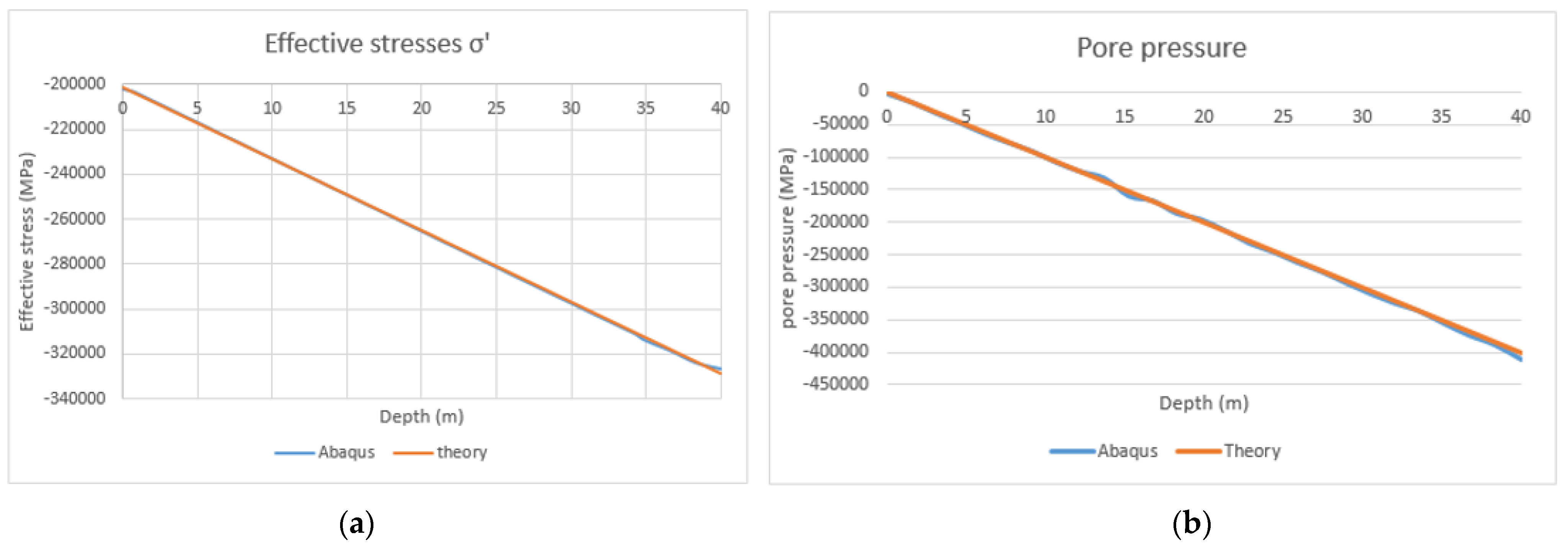
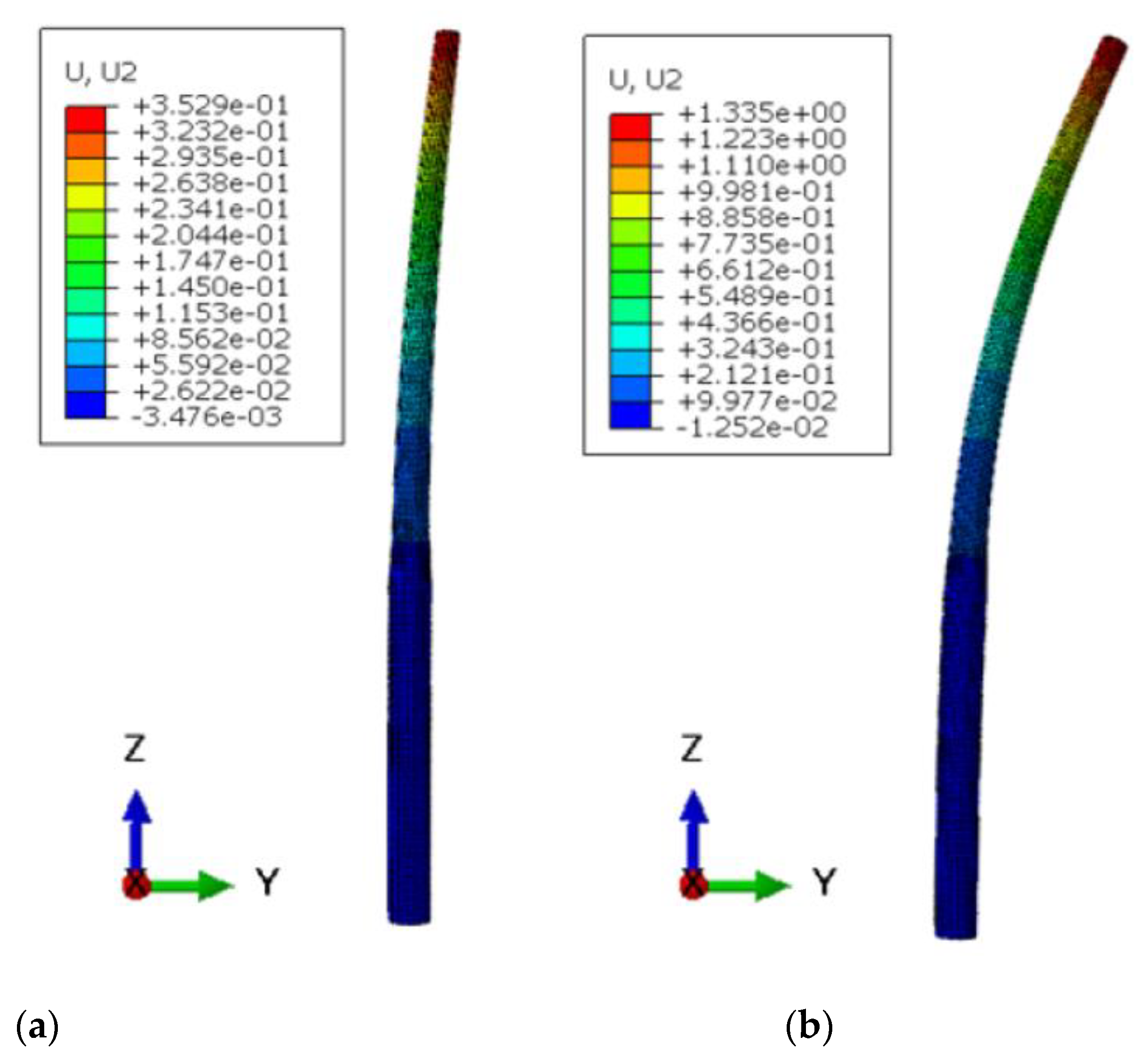
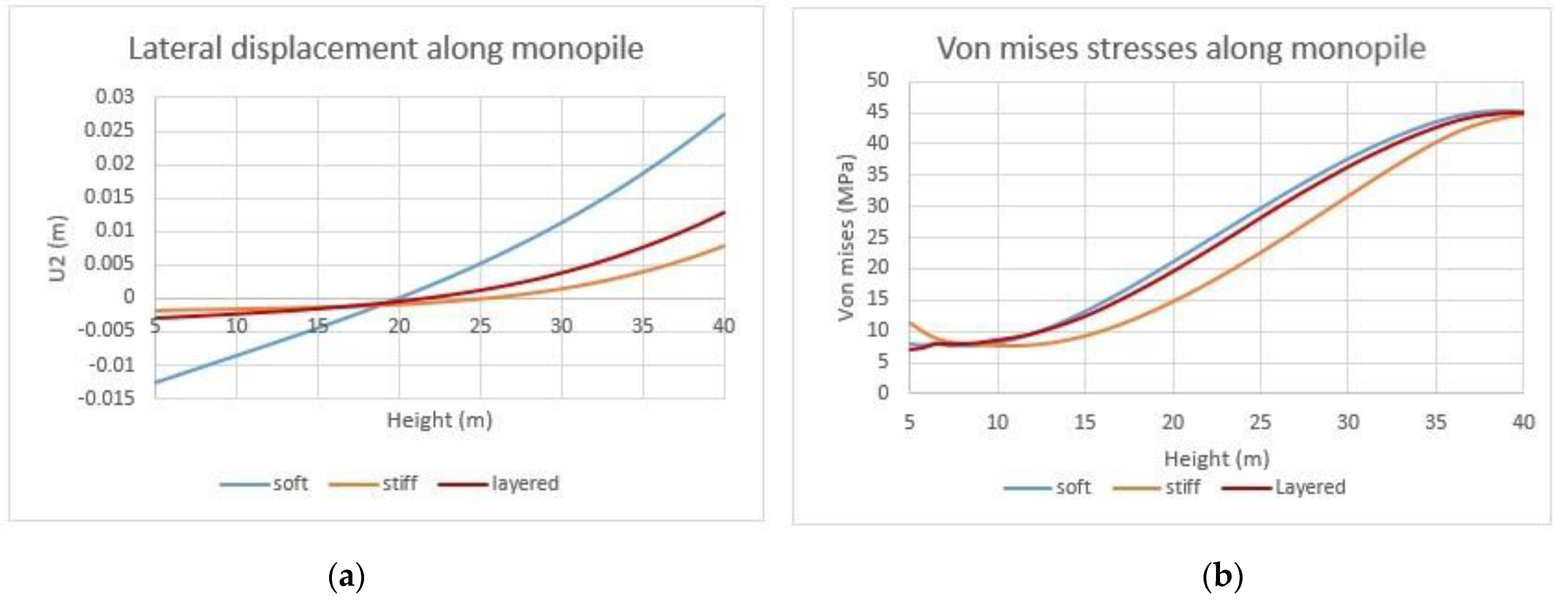
3.2. Design 2 Results
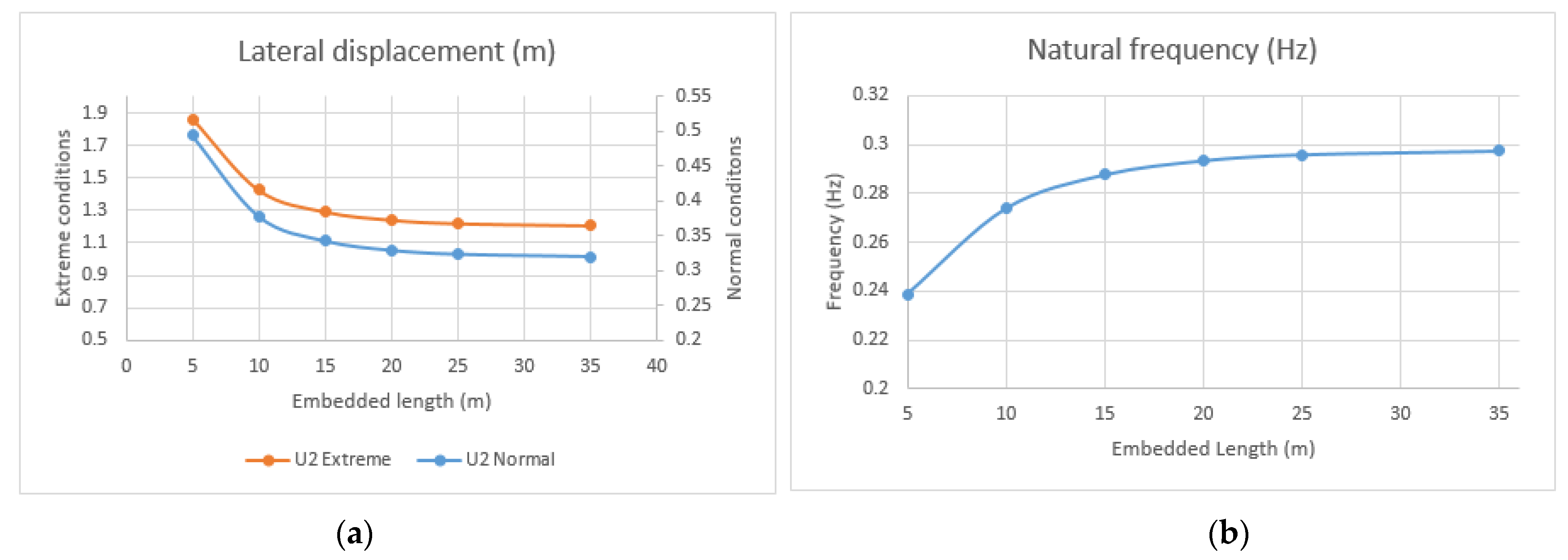
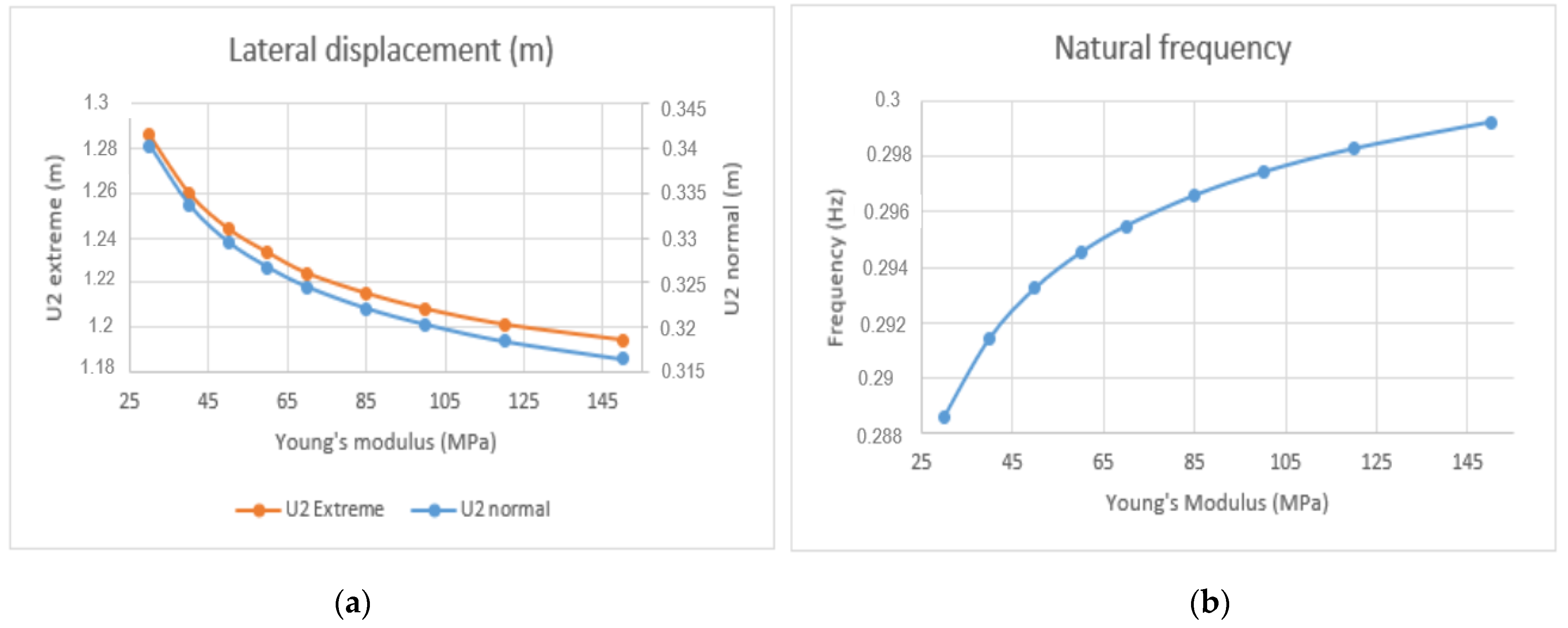
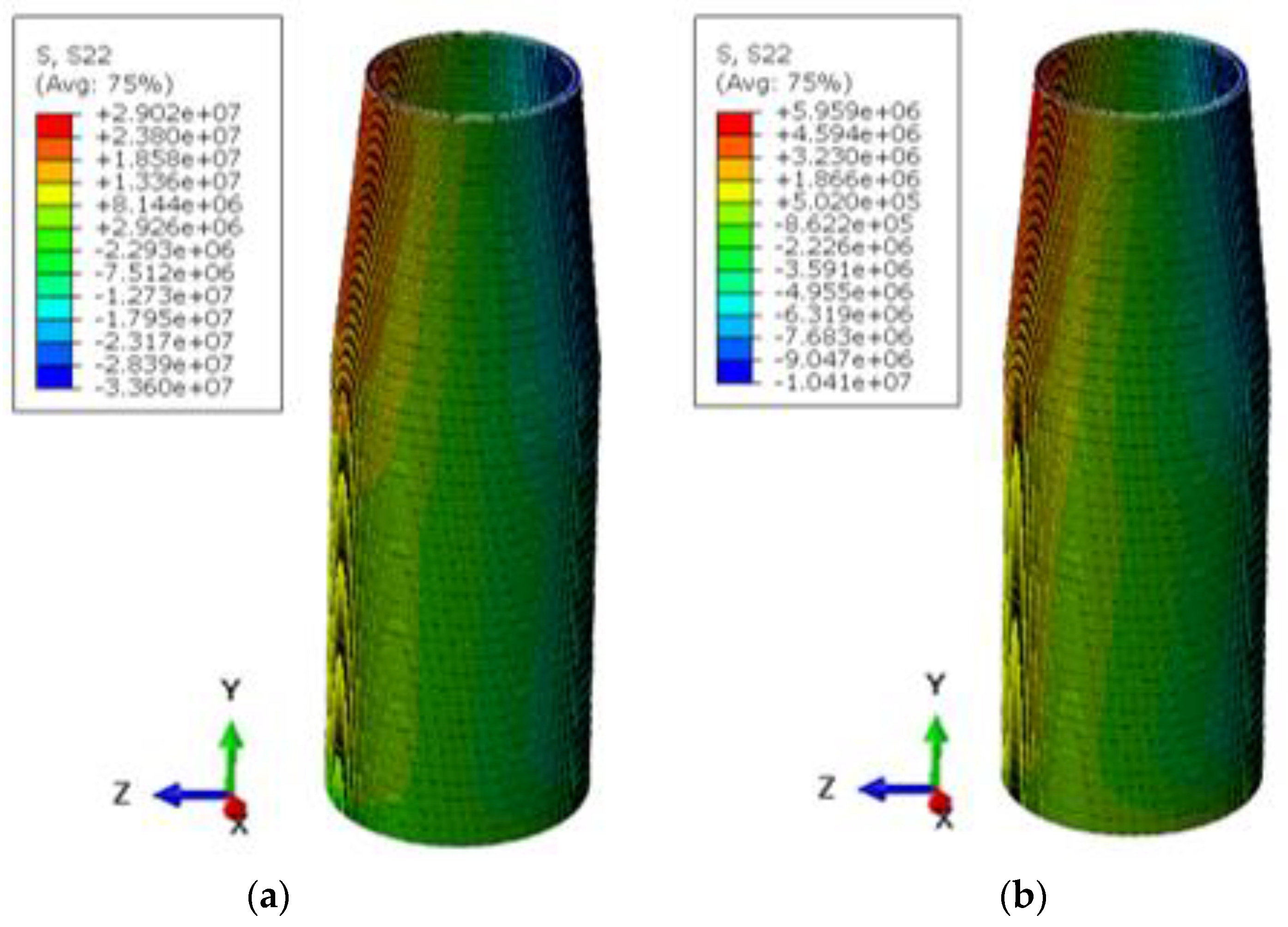
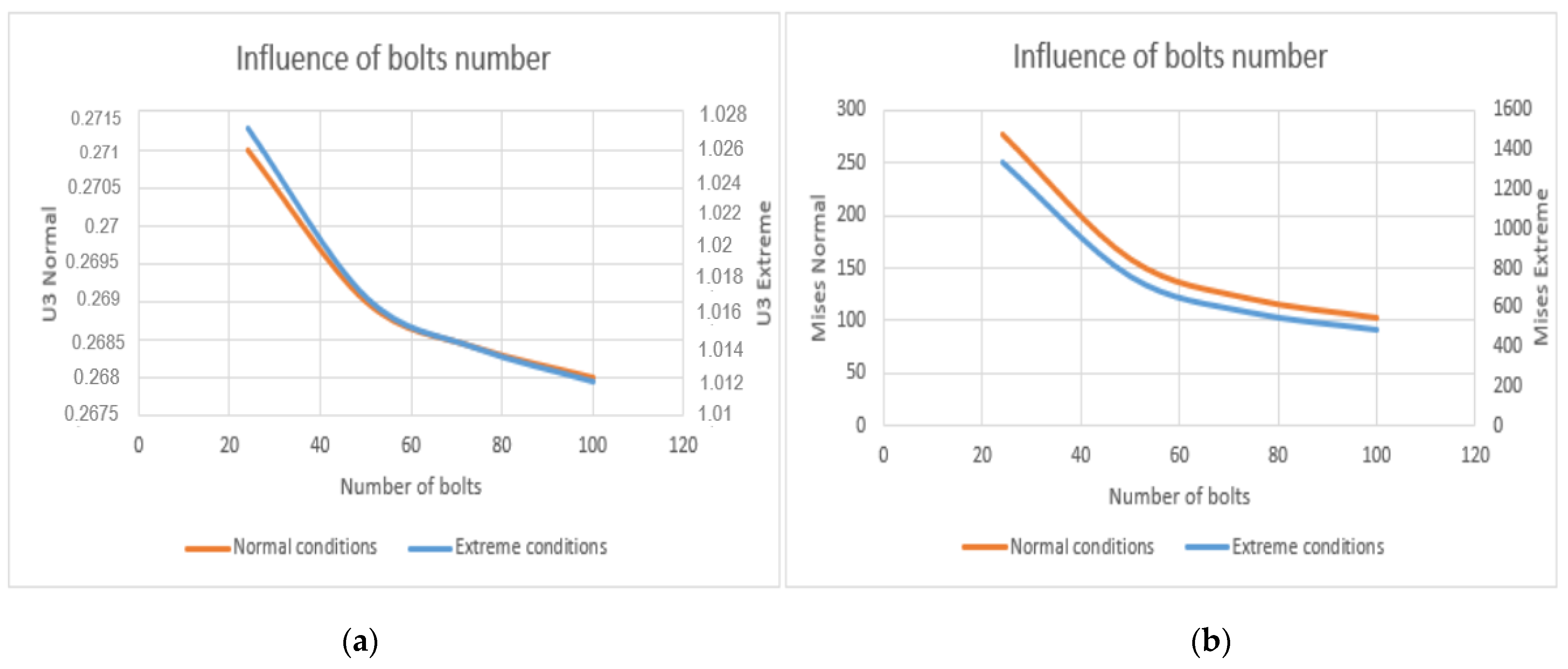
3.3. Design 3 Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lins, C.; Williamson, L.E.; Leitner, S.; Teske, S. The first decade: 2004—2014: 10 years of renewable energy progress. In Renewable Energy Policy Network for the 21st Century; 2014; Available online: https://www.ren21.net/Portals/0/documents/activities/Topical%20Reports/REN21_10yr.pdf (accessed on 12 June 2021).
- Midilli, A.; Dincer, I.; Ay, M. Green energy strategies for sustainable development. Energy Policy 2006, 34, 3623–3633. [Google Scholar] [CrossRef]
- Ribrant, J.; Bertling, L.M. Survey of Failures in Wind Power Systems with Focus on Swedish Wind Power Plants during 1997–2005. IEEE Trans. Energy Convers. 2007, 22, 167–173. [Google Scholar] [CrossRef]
- Adedipe, O.; Brennan, F.; Kolios, A. Review of corrosion fatigue in offshore structures: Present status and challenges in the offshore wind sector. Renew. Sustain. Energy Rev. 2016, 61, 141–154. [Google Scholar] [CrossRef]
- Arshad, M.; O’Kelly, B.C. Offshore wind-turbine structures: A review. Proc. Inst. Civ. Eng. Energy 2013, 166, 139–152. [Google Scholar] [CrossRef]
- Alderlieste, E.A. Experimental Modelling of Lateral Loads on Large Diameter Mono-Pile Foundations in Sand. Master’s Thesis, TU Delft, Mekelweg, The Netherlands, 2011. [Google Scholar]
- Wang, X.; Zeng, X.; Li, J.; Yang, X.; Wang, H. A review on recent advancements of substructures for offshore wind turbines. Energy Convers. Manag. 2018, 158, 103–119. [Google Scholar] [CrossRef]
- Byrne, B.W.; Houlsby, G.T. Foundations for offshore wind turbines. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2003, 361, 2909–2930. [Google Scholar] [CrossRef] [PubMed]
- Lombardi, D.; Bhattacharya, S.; Wood, D.M. Dynamic soil–structure interaction of monopile supported wind turbines in cohesive soil. Soil Dyn. Earthq. Eng. 2013, 49, 165–180. [Google Scholar] [CrossRef]
- Bhattacharya, S. Challenges in design of foundations for offshore wind turbines. Eng. Technol. Ref. 2014, 1, 922. [Google Scholar] [CrossRef]
- Roddier, D.; Cermelli, C.; Aubault, A.; Weinstein, A. WindFloat: A floating foundation for offshore wind turbines. J. Renew. Sustain. Energy 2010, 2, 033104. [Google Scholar] [CrossRef]
- Adhikari, S.; Bhattacharya, S. Dynamic Analysis of Wind Turbine Towers on Flexible Foundations. Shock. Vib. 2012, 19, 37–56. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Nikitas, N.; Garnsey, J.; Alexander, N.; Cox, J.; Lombardi, D.; Wood, D.M.; Nash, D. Observed dynamic soil–structure interaction in scale testing of offshore wind turbine foundations. Soil Dyn. Earthq. Eng. 2013, 54, 47–60. [Google Scholar] [CrossRef]
- Andersen, L.; Vahdatirad, M.; Sichani, M.; Sørensen, J. Natural frequencies of wind turbines on monopile foundations in clayey soils—A probabilistic approach. Comput. Geotech. 2012, 43, 1–11. [Google Scholar] [CrossRef]
- Breton, S.-P.; Moe, G. Status, plans and technologies for offshore wind turbines in Europe and North America. Renew. Energy 2009, 34, 646–654. [Google Scholar] [CrossRef]
- Aasen, S.; Page, A.; Skau, K.S.; Nygaard, T.A. Effect of foundation modelling on the fatigue lifetime of a monopile-based offshore wind turbine. Wind. Energy Sci. 2017, 2, 361–376. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, J.; He, Y. Preliminary Design of a Multi-Column TLP Foundation for a 5-MW Offshore Wind Turbine. Energies 2012, 5, 3874–3891. [Google Scholar] [CrossRef]
- Dvorak, M.J.; Archer, C.L.; Jacobson, M.Z. California offshore wind energy potential. Renew. Energy 2010, 35, 1244–1254. [Google Scholar] [CrossRef]
- Bush, E.; Manuel, L. Foundation models for offshore wind turbines. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2009. [Google Scholar]
- Hokmabadi, A.S.; Fatahi, B.; Samali, B. Assessment of soil–pile–structure interaction influencing seismic response of mid-rise buildings sitting on floating pile foundations. Comput. Geotech. 2014, 55, 172–186. [Google Scholar] [CrossRef]
- Roddier, D.; Cermelli, C.; Weinstein, A. WindFloat: A Floating Foundation for Offshore Wind Turbines—Part I: Design Basis and Qualification Process. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; pp. 845–853. [Google Scholar]
- Ibsen, L.B.; Brincker, R. Design of a new foundation for offshore wind turbines. In Proceedings of the IMAC-22: A Conference on Structural Dynamics, Hyatt Regency Dearborn; Society for Experimental Mechanics, Dearborn, MN, USA, 26–29 January 2004. [Google Scholar]
- Yamaguchi, A.; Ishihara, T. Assessment of offshore wind energy potential using mesoscale model and geographic information system. Renew. Energy 2014, 69, 506–515. [Google Scholar] [CrossRef]
- Wu, X.; Hu, Y.; Li, Y.; Yang, J.; Duan, L.; Wang, T.; Adcock, T.; Jiang, Z.; Gao, Z.; Lin, Z.; et al. Foundations of offshore wind turbines: A review. Renew. Sustain. Energy Rev. 2019, 104, 379–393. [Google Scholar] [CrossRef]
- Aubault, A.; Cermelli, C.; Roddier, D. WindFloat: A Floating Foundation for Offshore Wind Turbines—Part III: Structural Analysis. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; pp. 213–220. [Google Scholar]
- Cermelli, C.; Roddier, D.; Aubault, A. WindFloat: A Floating Foundation for Offshore Wind Turbines—Part II: Hydrodynamics Analysis. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; pp. 135–143. [Google Scholar]
- Gueydon, S.; Weller, S. Study of a Floating Foundation for Wind Turbines. J. Offshore Mech. Arct. Eng. 2013, 135, 031903. [Google Scholar] [CrossRef]
- Liu, Y.; Li, S.; Yi, Q.; Chen, D. Developments in semi-submersible floating foundations supporting wind turbines: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 60, 433–449. [Google Scholar] [CrossRef]
- Zhou, S.; Shan, B.; Xiao, Y.; Li, C.; Hu, G.; Song, X.; Liu, Y.; Hu, Y. Directionality Effects of Aligned Wind and Wave Loads on a Y-Shape Semi-Submersible Floating Wind Turbine under Rated Operational Conditions. Energies 2017, 10, 2097. [Google Scholar] [CrossRef]
- Oh, K.-Y.; Nam, W.; Ryu, M.S.; Kim, J.-Y.; Epureanu, B.I. A review of foundations of offshore wind energy convertors: Current status and future perspectives. Renew. Sustain. Energy Rev. 2018, 88, 16–36. [Google Scholar] [CrossRef]
- Bredmose, H.; Skourup, J.; Hansen, E.A.; Christensen, E.D.; Pedersen, L.M.; Mitzlaff, A. Numerical reproduction of extreme wave loads on a gravity wind turbine foundation. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; pp. 279–287. [Google Scholar] [CrossRef]
- Lotsberg, I. Structural mechanics for design of grouted connections in monopile wind turbine structures. Mar. Struct. 2013, 32, 113–135. [Google Scholar] [CrossRef]
- Damgaard, M.; Bayat, M.; Andersen, L.; Ibsen, L. Assessment of the dynamic behaviour of saturated soil subjected to cyclic loading from offshore monopile wind turbine foundations. Comput. Geotech. 2014, 61, 116–126. [Google Scholar] [CrossRef]
- Carswell, W.; Johansson, J.; Løvholt, F.; Arwade, S.; Madshus, C.; DeGroot, D.; Myers, A. Foundation damping and the dynamics of offshore wind turbine monopiles. Renew. Energy 2015, 80, 724–736. [Google Scholar] [CrossRef]
- Lozano-Minguez, E.; Kolios, A.; Brennan, F. Multi-criteria assessment of offshore wind turbine support structures. Renew. Energy 2011, 36, 2831–2837. [Google Scholar] [CrossRef]
- Yeter, B.; Garbatov, Y.; Soares, C.G. Fatigue damage assessment of fixed offshore wind turbine tripod support structures. Eng. Struct. 2015, 101, 518–528. [Google Scholar] [CrossRef]
- Yang, H.; Zhu, Y.; Lu, Q.; Zhang, J. Dynamic reliability based design optimization of the tripod sub-structure of offshore wind turbines. Renew. Energy 2015, 78, 16–25. [Google Scholar] [CrossRef]
- O’Kelly, B.; Arshad, M. Offshore wind turbine foundations–analysis and design. In Offshore Wind Farms; Elsevier: Amsterdam, The Netherland, 2016; pp. 589–610. [Google Scholar]
- Shi, W.; Park, H.; Han, J.; Na, S.; Kim, C. A study on the effect of different modeling parameters on the dynamic response of a jacket-type offshore wind turbine in the Korean Southwest Sea. Renew. Energy 2013, 58, 50–59. [Google Scholar] [CrossRef]
- Dong, W.; Moan, T.; Gao, Z. Long-term fatigue analysis of multi-planar tubular joints for jacket-type offshore wind turbine in time domain. Eng. Struct. 2011, 33, 2002–2014. [Google Scholar] [CrossRef]
- Wang, X.; Yang, X.; Zeng, X. Lateral response of improved suction bucket foundation for offshore wind turbine in centrifuge modelling. Ocean Eng. 2017, 141, 295–307. [Google Scholar] [CrossRef]
- Arany, L.; Bhattacharya, S. Simplified load estimation and sizing of suction anchors for spar buoy type floating offshore wind turbines. Ocean Eng. 2018, 159, 348–357. [Google Scholar] [CrossRef]
- Malhotra, S. Design and construction considerations for offshore wind turbine foundations. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007. [Google Scholar]
- Leung, D.Y.; Yang, Y. Wind energy development and its environmental impact: A review. Renew. Sustain. Energy Rev. 2012, 16, 1031–1039. [Google Scholar] [CrossRef]
- Westgate, Z.J.; DeJong, J.T. Geotechnical Considerations for Offshore Wind Turbines; Report for MTC OTC Project; Penn State University: State College, PA, USA, 2005. [Google Scholar]
- Zhixin, W.; Chuanwen, J.; Qian, A.; Chengmin, W. The key technology of offshore wind farm and its new development in China. Renew. Sustain. Energy Rev. 2009, 13, 216–222. [Google Scholar] [CrossRef]
- O’Kelly, B.C. and M. Arshad, 20-Offshore wind turbine foundations–analysis and design. In Offshore Wind Farms; Ng, C., Ran, L., Eds.; Woodhead Publishing: Sawston, UK, 2016; pp. 589–610. [Google Scholar]
- Lee, Y.-S.; Choi, B.-L.; Lee, J.H.; Kim, S.Y.; Han, S. Reliability-based design optimization of monopile transition piece for offshore wind turbine system. Renew. Energy 2014, 71, 729–741. [Google Scholar] [CrossRef]
- Seo, J.; Schaffer, W.; Head, M.; Shokouhian, M. Retrofitting of monopile transition piece for offshore wind turbines. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–27 June 2017; International Society of Offshore and Polar Engineers: Mountain View, CA, USA, 2017. [Google Scholar]
- Achmus, M.; Kuo, Y.-S.; Abdel-Rahman, K. Behavior of monopile foundations under cyclic lateral load. Comput. Geotech. 2009, 36, 725–735. [Google Scholar] [CrossRef]
- Moller, A. Efficient Offshore Wind Turbine Foundations. Wind. Eng. 2005, 29, 463–469. [Google Scholar] [CrossRef]
- Igwemezie, V.; Mehmanparast, A.; Kolios, A. Current trend in offshore wind energy sector and material requirements for fatigue resistance improvement in large wind turbine support structures–A review. Renew. Sustain. Energy Rev. 2019, 101, 181–196. [Google Scholar] [CrossRef]
- Gill, J.P.; Sales, D.; Pinder, S.; Salazar, R. Kentish Flats Wind Farm, Fifth Ornithological Monitoring Report; Environmentally Sustainable Systems report to Kentish Flats Ltd.: Edinburg, UK, 2008. [Google Scholar]
- Athanasia, A.; Genachte, A.B. Deep Offshore and New Foundation Concepts. Energy Procedia 2013, 35, 198–209. [Google Scholar] [CrossRef][Green Version]
- Shi, W.; Park, H.; Chung, C.; Baek, J.; Kim, J.; Kim, C. Load analysis and comparison of different jacket foundations. Renew. Energy 2013, 54, 201–210. [Google Scholar] [CrossRef]
- Harte, M.; Basu, B.; Nielsen, S. Dynamic analysis of wind turbines including soil-structure interaction. Eng. Struct. 2012, 45, 509–518. [Google Scholar] [CrossRef]
- Arany, L.; Bhattacharya, S.; Macdonald, J.; Hogan, S.J. Simplified critical mudline bending moment spectra of offshore wind turbine support structures. Wind. Energy 2014, 18, 2171–2197. [Google Scholar] [CrossRef]
- Lian, J.; Jiang, Q.; Dong, X.; Zhao, Y.; Zhao, H.; Zhao, L. Dong Dynamic Impedance of the Wide-Shallow Bucket Foundation for Offshore Wind Turbine using Coupled Finite–Infinite Element Method. Energies 2019, 12, 4370. [Google Scholar] [CrossRef]
- Bouzid, D.A.; Bhattacharya, S.; Otsmane, L. Assessment of natural frequency of installed offshore wind turbines using nonlinear finite element model considering soil-monopile interaction. J. Rock Mech. Geotech. Eng. 2018, 10, 333–346. [Google Scholar] [CrossRef]
- Zoumakis, N. The dependence of the power-law exponent on surface roughness and stability in a neutrally and stably stratified surface boundary layer. Atmosfera 2009, 6. [Google Scholar]
- Davenport, A.G. The application of statistical concepts to the wind loading of structures. Proc. Inst. Civ. Eng. 1961, 19, 449–472. [Google Scholar] [CrossRef]
- Garcés García, C. Design and Calculus of the Foundation Structure of an Offshore Monopile Wind Turbine; 2012; Available online: https://upcommons.upc.edu/bitstream/handle/2099.1/19209/Design%20and%20Calculus.pdf?sequence=1&isAllowed=y (accessed on 10 June 2021).
- Bilgili, M.; Yaşar, A.; Ilhan, A.; Șahin, B. Aerodynamic characteristics of a horizontal axis wind turbine in Belen-Hatay, Turkey. Int. J. Nat. Eng. Sci. 2015, 9, 54–58. [Google Scholar]
- ABS. Design Standards for Offshore Wind Farms. M10PC00105. 2011. Available online: https://www.bsee.gov/sites/bsee.gov/files/tap-technical-assessment-program/670aa.pdf (accessed on 12 June 2021).
- Murtagh, P.J.; Basu, B.; Broderick, B.M. Along-wind response of a wind turbine tower with blade coupling subjected to rota-tionally sampled wind loading. Eng. Struct. 2005, 27, 1209–1219. [Google Scholar] [CrossRef]
- AS, DET NORSKE VERITAS. Modelling and analysis of marine operations. Recommended Practice: DNV-RP-H103. 2011. Available online: https://home.hvl.no/ansatte/tct/FTP/H2020%20Marinteknisk%20Analyse/Regelverk%20og%20standarder/DnV_documents/RP-H103.pdf (accessed on 12 June 2021).
- Pavlou, D.G. Soil–Structure–Wave Interaction of Gravity-Based Offshore Wind Turbines: An Analytical Model. J. Offshore Mech. Arct. Eng. 2021, 143. [Google Scholar] [CrossRef]
- Pavlou, D.G.; Li, Y. Seabed Dynamic Response of Offshore Wind Turbine Foundation under Vertical Harmonic Loading: An Analytic Solution. Math. Probl. Eng. 2018, 2018, 1–9. [Google Scholar] [CrossRef]
- Kunisu, H. Evaluation of wave force acting on Submerged Floating Tunnels. Procedia Eng. 2010, 4, 99–105. [Google Scholar] [CrossRef]
- Techet, A. Morrison’s Equation; Class Notes: Spring; 2004; Available online: https://www.cottey.edu/pdf/viewpoint/vp_archive/sp04_vp/sp04_classnotes.html (accessed on 10 June 2021).
- Yue, D.K.P. 2.20 Marine Hydrodynamics (13.021). 2005. Available online: https://ocw.mit.edu/courses/mechanical-engineering/2-20-marine-hydrodynamics-13-021-spring-2005/ (accessed on 10 February 2021).
- Ivanhoe, R.O.; Wang, L.; Kolios, A. Generic framework for reliability assessment of offshore wind turbine jacket support structures under stochastic and time dependent variables. Ocean Eng. 2020, 216, 107691. [Google Scholar] [CrossRef]
- Bai, Y.; Bai, Q. Subsea Pipelines and Risers; Elsevier BV: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Haiderali, A.; Madabhushi, G. Three-Dimensional Finite Element Modelling of Monopiles for Offshore Wind Turbines. In Proceedings of the 2012 World Congress on Advances in Civil, Environmental, and Materials Research (ACEM’ 12), Seoul, Korea, 26–30 August 2012. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Lab.: Golden, CO, USA, 2009. [Google Scholar]
- Lago, L.I.; Ponta, F.L.; Otero, A.D. Analysis of alternative adaptive geometrical configurations for the NREL-5 MW wind turbine blade. Renew. Energy 2013, 59, 13–22. [Google Scholar] [CrossRef]
- Duan, N. Mechanical Characteristics of Monopile Foundation in Sand for Offshore Wind Turbine; UCL (University College London): London, UK, 2016. [Google Scholar]
- Skempton, A.W. Selected Papers on Soil Mechanics. Sel. Pap. Soil Mech. 1984, 1032, 4–16. [Google Scholar] [CrossRef]
- Bhattacharya, S. Design of Foundations for Offshore Wind Turbines; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2019. [Google Scholar]
- Arany, L.; Bhattacharya, S.; Adhikari, S.; Hogan, S.; Macdonald, J. An analytical model to predict the natural frequency of offshore wind turbines on three-spring flexible foundations using two different beam models. Soil Dyn. Earthq. Eng. 2015, 74, 40–45. [Google Scholar] [CrossRef]
- Mehmanparast, A.; Lotfian, S.; Vipin, S.P. A Review of Challenges and Opportunities Associated with Bolted Flange Con-nections in the Offshore Wind Industry. Metals 2020, 10, 732. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design 1 (Without the Soil) | Design 2 (With the Soil) | |
| Loads: Weight of Blades and Nacelle Rotor Force Weight of Structure Lateral Loads (Waves and Wind) | Four Steps: | Three Different Types of Soil: |
| Soil Step (Behaviour of the Soil) Gravity Loads (Soil and Structure) Loads in Normal Conditions (NC) Loads in Extreme Conditions (EC) | (1) Homogeneous Stiff Clay (2) Homogeneous Soft Clay (3) Layered Soil (Composed of Sand and Clay) | |
| Design 3 (With the Soil + Transition Piece + Grout + Connection between Tower and Transition Piece) | ||
| Grout (Cylindrical Pipe with Constant Radius) Transition Piece (Cylindrical Pipe with Variable Cross-Section) Grout Connection (Made of Concrete) | ||
| Normal Conditions | Extreme Sea State | ||
|---|---|---|---|
| Wave parameters | Significant height H | 1 m | 8.4 m |
| Wave length λ | 48.09 m | 173 m | |
| Wave period T | 5.579 s | 13.359 s | |
| Wave pulsation ω | 1.126064 rad/s | 0.47032 rad/s | |
| Wind speed | Height = 13.80 m | 6.38 m/s | 23.97 m/s |
| Height = 90 m | 8.02 m/s | 27.23 m/s | |
| Geometric Features | |
|---|---|
| Hub height | 90 m |
| Rotor diameter | 126 m |
| Diameter/thickness at the bottom | 6 m/0.027 m |
| Diameter/thickness at the top | 3.85 m/0.019 m |
| Drivetrain properties | |
| Rated rotor speed | 12.1 rpm |
| Nominal speed/cut-off speed | 11.2 m/s/25 m/s |
| Rated generator speed | 1173.7 rpm |
| Electrical generator efficiency | 94.4% |
| Mass properties | |
| Rotor weight | 110,000 kg |
| Nacelle weight | 240,000 kg |
| Tower weight | 347,460 kg |
| Total weight | 697,460 kg |
| Frequency | |
| 1P Frequency range | 0.115 Hz–0.20 Hz |
| 3P Frequency range | 0.35 Hz–0.61 Hz |
| Theoretical natural frequency | 0.3240 Hz |
| Depth (m) | E (MPa) | υ (Unitless) | (Unitless) | Φ (°) | Ψ (°) | |
|---|---|---|---|---|---|---|
| 0–5 m: Dense sand | 60 | 0.35 | 918.4 | 0.81 | 33 | 3 |
| 5–10 m: Soft clay | 20 | 0.45 | 1120 | 0.66 | 0 | 0 |
| 10–15 m: Stiff clay | 75 | 0.45 | 1200 | 0.54 | 0 | 0 |
| 15–20 m: Stiff clay | 85 | 0.45 | 1250 | 0.43 | 0 | 0 |
| 20–25 m: Dense sand | 75 | 0.35 | 968.4 | 0.72 | 38 | 8 |
| 25–30 m: Soft clay | 25 | 0.45 | 1190 | 0.59 | 0 | 0 |
| 30–40 m: Stiff clay | 95 | 0.45 | 1070 | 0.43 | 0 | 0 |
| Part | Outer Diameter | Thickness | Length |
|---|---|---|---|
| Monopile | 7 m | 0.13 m | 19 m |
| Grout | 7.36 m | 0.18 m | 12.5 m |
| Transition piece to sea level | 7.7 m | 0.17 m | 13.5 m |
| Transition piece at flange connection | 7 m | 0.17 m | 9.75 m |
| Properties | Grout |
|---|---|
| Density | 2470 |
| Young’s modulus E | 70 GPa |
| Poisson’s ratio υ | 0.19 |
| Coefficient of friction with the steel | 0.5 |
| Design 1 | Design 2 | Design 3 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Soil 1 | Soil 2 | Soil 3 | ||||||||
| NC | EC | NC | EC | NC | EC | NC | EC | NC | EC | |
| Maximum Lateral Displacement (m) | 0.2914 | 1.097 | 0.3203 | 1.208 | 0.3529 | 1.335 | 0.3284 | 1.24 | 0.2680 | 1.012 |
| Maximum Von Mises Stress (MPa) | 58.61 | 189.3 | * | * | * | * | * | * | 102.7 | 490.2 |
| Natural Frequency (Hz) | 0.31051 | 0.31051 | 0.28330 | 0.29371 | 0.31051 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jacomet, A.; Khosravifardshirazi, A.; Sahafnejad-Mohammadi, I.; Dibaj, M.; Javadi, A.A.; Akrami, M. Analysing the Influential Parameters on the Monopile Foundation of an Offshore Wind Turbine. Computation 2021, 9, 71. https://doi.org/10.3390/computation9060071
Jacomet A, Khosravifardshirazi A, Sahafnejad-Mohammadi I, Dibaj M, Javadi AA, Akrami M. Analysing the Influential Parameters on the Monopile Foundation of an Offshore Wind Turbine. Computation. 2021; 9(6):71. https://doi.org/10.3390/computation9060071
Chicago/Turabian StyleJacomet, Adrien, Ali Khosravifardshirazi, Iman Sahafnejad-Mohammadi, Mahdieh Dibaj, Akbar A. Javadi, and Mohammad Akrami. 2021. "Analysing the Influential Parameters on the Monopile Foundation of an Offshore Wind Turbine" Computation 9, no. 6: 71. https://doi.org/10.3390/computation9060071
APA StyleJacomet, A., Khosravifardshirazi, A., Sahafnejad-Mohammadi, I., Dibaj, M., Javadi, A. A., & Akrami, M. (2021). Analysing the Influential Parameters on the Monopile Foundation of an Offshore Wind Turbine. Computation, 9(6), 71. https://doi.org/10.3390/computation9060071