
On the Use of Composite Functions in the Simple Equations Method to Obtain Exact Solutions of Nonlinear Differential Equations



Abstract
1. Introduction
- Almost at the same time, Hirota developed a method for obtaining exact solutions of nonlinear partial differential equations [25,26]. The Hirota method is connected also to an appropriate transformation of the nonlinearity of the equation. The truncated Painleve expansions may lead to many of these transformations [27,28,29,30,31].
- We note the work of Kudryashov. He formulated the Method of the Simplest Equation (MSE) [32]. The method is based on the determination of the singularity order n of the solved equation. Then, a particular solution of this equation is searched as a series containing powers of the solution of a simpler equation. This simpler equation is called the simplest equation. The methodology was extended [33] and applied to obtain traveling wave solutions of nonlinear partial differential equations (see, e.g., [34,35,36]). Kudryashov [37] used various transformations in order to transform the nonlinearity of a generalized evolution equation of the wave dynamics. Then, he obtained exact solutions of this equation. This research was continued in [31,38,39]. For recent results connected to the application of the method of the simplest equation, see [40,41,42,43,44,45,46];
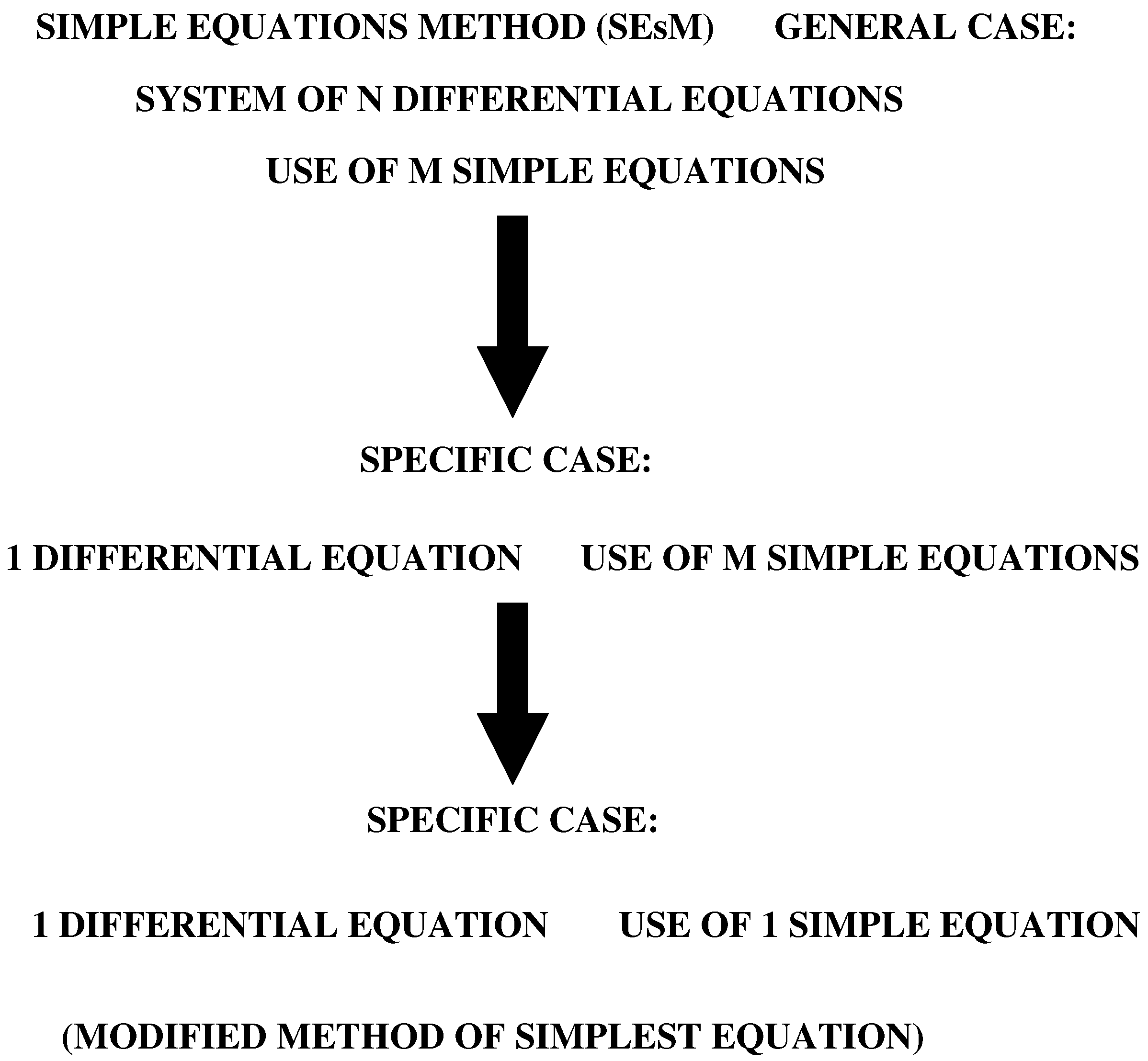
- We developed a methodology for obtaining the exact and approximate solutions of nonlinear partial differential equations. The methodology is called the Simple Equations Method (SEsM) [47,48,49,50,51]. Some elements of the methodology can be seen in our publications written a long time ago [5253,54,55]. At the beginning [56,57], we used the ordinary differential equation of Bernoulli as the simplest equation [58]. This version of the methodology was called the Modified Method of the Simplest Equation (MMSE). It was used to obtain exact solutions of model nonlinear partial differential equations from ecology and population dynamics [59];
- In these early publications, we used the concept of the balance equation. This helped us determine the kind of the simplest equations, as well as the form of the solution as a series of the solution of the simplest equation [60,61]. We note that the MMSE leads to results that are equivalent to the methodology of Kudryashov mentioned above. Our contributions to the methodology and its application till 2018 were connected to the MMSE [62,63,64,65,66,67]. We note especially the article [66]. It is connected to the part of the topics discussed below in the text;
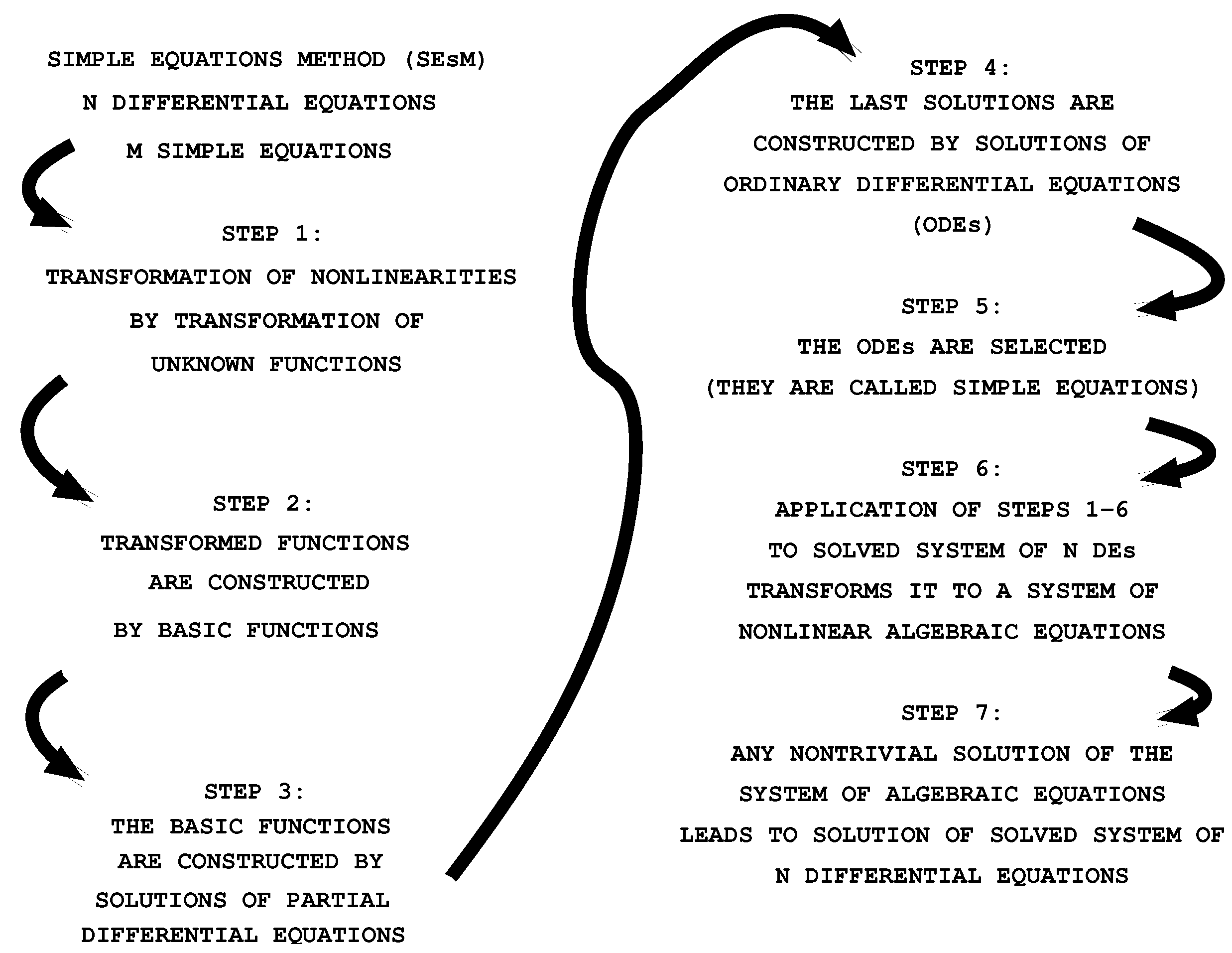
- In the course of the years, the MMSE was extended to the SEsM [47]. The SEsM is connected to the possibility of the use of more than one simple equation. Thus, the solution of the solved nonlinear differential equation can be constructed on the basis of many simple equations. A version of the SEsM based on two simple equations was applied in [68]. The first description of the methodology was made in [48] and then in [47,49,50,51,69]. For more applications of specific cases of the SEsM, see [70,71,72].
2. Materials and Methods
3. Results
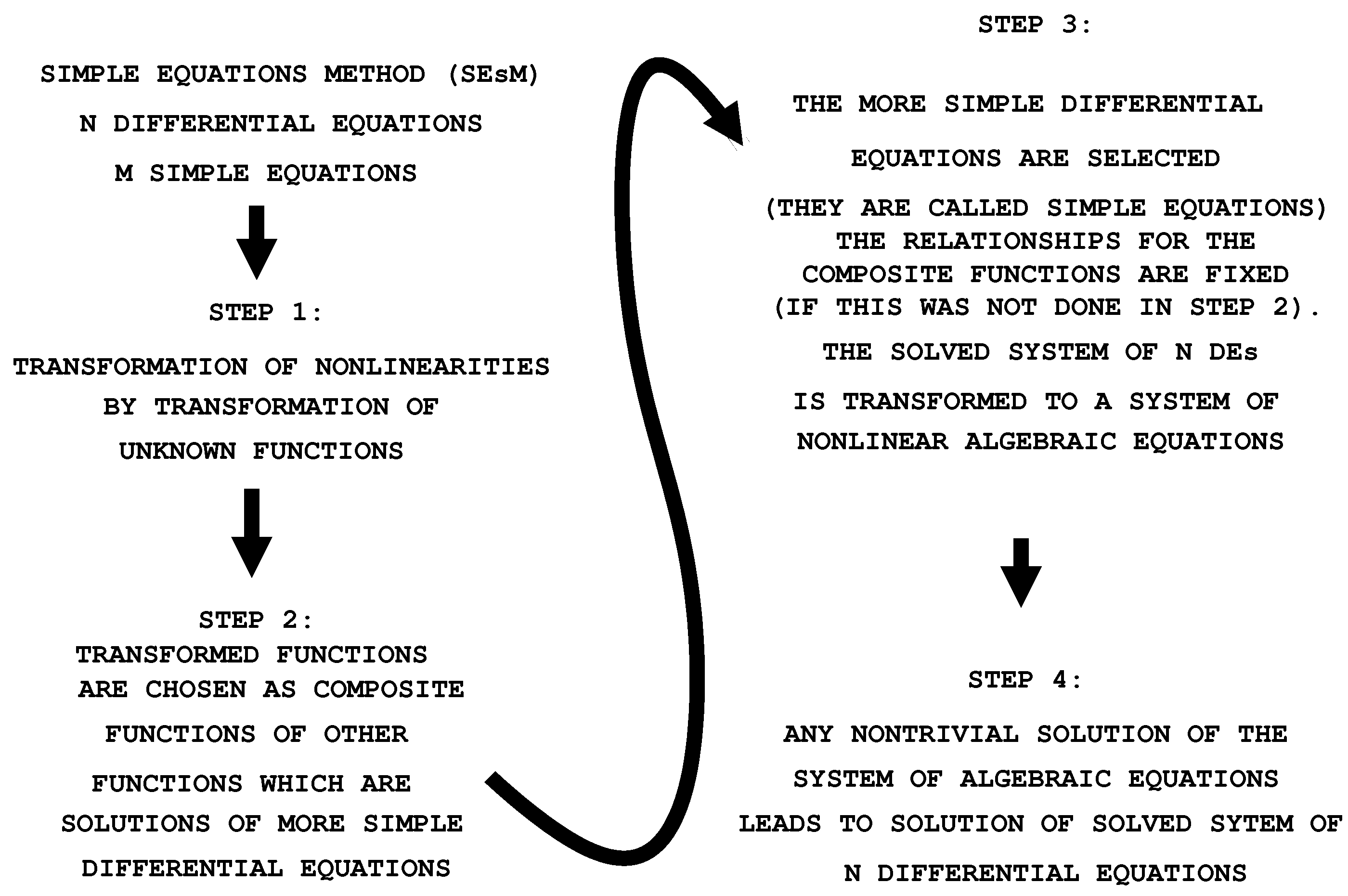
3.1. The Amended Version of the SEsM
- (1)
- We applied transformations:is a function of other functions . , , … are functions of several spatial variables, as well as of time. The transformations have two goals:
- (a)
- (b)
- They can transform the nonlinearity of the solved differential equations to a more treatable kind of nonlinearity (e.g., to polynomial nonlinearity).
In the case of one solved equation, the transformation can be: the Painleve expansion; in the case of the sine-Gordon equation; in the case of sh-Gordon (Poisson–Boltzmann equation) (for applications of the last two transformations, see, e.g., [52,53,54]); ; ; or another transformation.In numerous cases, one may skip this step (then, we have ). In many other cases, the transformation is needed to obtain a solution of the studied nonlinear PDE. The application of Equation (2) to Equation (1) leads to a nonlinear differential equations for the functions .No general form is known for the transformations . The reason is that the nonlinearities in the solved equations can be of different kinds. The most studied cases of transformations are transformations that result in differential equations containing polynomial nonlinearities; - (2)
- This step is based on the use of composite functions. It unifies Steps 2–4 from the version of the SEsM from [47]. In this step, the functions , , … are chosen as composite functions of the functions , , …, which are solutions of simpler differential equations (Step 2 in Figure 3). There are two possibilities:
- (a)
- The construction relationship for the composite function is not fixed. Then, we have to use the Faa di Bruno relationship for the derivatives of a composite function;
- (b)
- The construction relationship for the composite function is fixed. For example, for the case of one solved equation and one function F, the construction relationship can be chosen to be:Then, one can directly calculate the corresponding derivatives from the solved differential equation;
- (3)
- In this step, we have to select the simple equations for the functions , , …. In addition, if we are in the hypothesis of Point (a) of Step 2, we have to fix the relationship between the composite functions , , …, and the functions , , …. We note that the fixation of the simple equations and the fixation of the relationships for the composite functions are connected. The fixations transform the left-hand sides of Equation (1). The result of this transformation can be functions that are the sum of terms. Each of these terms contains some function multiplied by a coefficient. This coefficient is a relationship containing some of the parameters of the solved equations and some of the parameters of the solutions of the simple equations used. The fixation mentioned above is performed by a balance procedure that ensures that the relationships for the coefficients contain more than one term. This balance procedure leads to one or more additional relationships among the parameters of the solved equation and parameters of the solutions of the simple equations used. These additional relationships are known as balance equations;
- (4)
- We may obtain a nontrivial solution of Equation (1) if all coefficients mentioned in Step 3 are set to zero. This condition usually leads to a system of nonlinear algebraic equations. The unknown variables in these equations are the coefficients of the solved nonlinear differential equation and the coefficients of the solutions of the simple equations. Any nontrivial solution of this algebraic system leads to a solution of the studied nonlinear partial differential equation.
- (a)
- The number, which is the sum of the number of parameters of the solution and the number of parameters of the equation, is larger than the number of algebraic equations or equal to the number of algebraic equations. Then, the system usually (but not in all of the cases) has a nontrivial solution (or solutions). Independent parameters may be presented in this solution. The other parameters of the solution are functions of the independent parameters;
- (b)
- The number, which is the sum of the number of parameters of the solution and the number of parameters of the equation, is smaller than the number of algebraic equations. Then, the system of algebraic equations usually does not have a nontrivial solution. However, there can be exceptions in this case. An exception occurs when the number of equations of the algebraic system can be reduced and this number becomes less than or equal to the number of available parameters. Then, Case (b) is reduced to Case (a), and a nontrivial solution is possible.
3.2. Faa di Bruno Relationship for Derivatives of a Composite Function
3.3. The General Case: Composite Function of Many Functions of Many Independent Variables
- is a d-dimensional index containing the integer non-negative numbers ;
- is a d-dimensional object containing the real numbers ;
- is the sum of the elements of the d-dimensional index ;
- is the factorial of the multicomponent index ;
- is the -th power of the multicomponent variable ;
- , is the -th derivative with respect to the multicomponent variable . We note that in this notation, is the identity operator;
- is the maximum value component of the multicomponent variable ;
- For the d-dimensional index ( are integers), we have when . Then, we define:
- Ordering of vector indexes: For two vector indexes and , we have when one of the following holds:
- (a)
- ;
- (b)
- and ;
- (c)
- , , … and for some .
Several Specific Cases of the General Relationship
- is the n-th derivative of the function h;
- is the k-th derivative of the function f;
- is the i-th derivative of the function g;
- : the set of numbers such that:
3.4. Several Results Relevant for Applications of the SEsM
- k: order of the derivative of g;
- l: degree of the derivative in the defining ODE;
- m: highest degree of the polynomial of g in the defining ODE.
3.5. Illustrative Examples
4. Concluding Remarks
- We presented an amended version of the SEsM in comparison to the version from [47]. The amended version was based on the use of composite functions and their derivatives. In such a way, the number of steps of the SEsM was reduced from seven to four. In the amended version of the SEsM, we determined the form of the composite functions used. This increased the amount of computations with respect to the amount of computations for the version of the SEsM with seven steps. In the last version, we made assumptions about the form of the relationships among the solutions of the solved equations and the solutions of the simple equations. This led to the intermediate steps, but decreased the amount of computation. However, if the assumptions are not appropriate, we may miss the solutions of the solved equations;
- We discussed a theorem that states that under certain conditions, a nonlinear differential equation with polynomials nonlinearities can be reduced to a polynomial containing monomials consisting of exponential functions. This theorem justified the application of the SEsM as the setting of the coefficients of the obtained polynomial to zero led to a system of nonlinear algebraic equation, which led exactly to Step 4 of the SEsM. We note that in such a way, the SEsM can lead to multisoliton solutions of a large class of equations. An illustrative example for the Korteweg–de Vries equation was given;
- A consequence of a theorem proven in [66] was used in order to show that the simple equation of the SEsM can contain polynomial nonlinearities of large power for the case when the composite function used in the SEsM is a function of one independent variable. This consequence showed that many methods that search for exact traveling wave solutions of nonlinear differential equations on the basis, for example, of the equations of Riccati and Bernoulli are specific cases of the SEsM;
- We presented many illustrative examples for the application of the amended version of the SEsM.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Several Polynomials Kn and Zn
Appendix B. Polynomials Li
Appendix C. Several Derivatives for the Case of a Function That Is a Composite Function of Two Functions of Two Independent Variables
Appendix D. Several Derivatives for the Case of a Function That Is a Composite Function of Three Functions of Two Independent Variables
References
- Latora, V.; Nicosia, V.; Russo, G. Complex Networks. Principles, Methods, and Applications; Cambridge University Press: Cambridge, UK, 2017; ISBN 978-1-107-10318-4. [Google Scholar]
- Chian, A.C.-L. Complex Systems Approach to Economic Dynamics; Springer: Berlin, Germany, 2007; ISBN 978-3-540-39752-6. [Google Scholar]
- Vitanov, N.K. Science Dynamics and Research Production. Indicators, Indexes, Statistical Laws and Mathematical Models; Springer: Cham, Switzerland, 2016; ISBN 978-3-319-41629-8. [Google Scholar]
- Treiber, M.; Kesting, A.A. Traffic Flow Dynamics: Data, Models, and Simulation; Springer: Berlin, Germany, 2013; ISBN 978-3-642-32460-4. [Google Scholar]
- May, R.M.; Levin, S.A.; Sugihara, G. Complex Systems: Ecology for Bankers. Nature 2008, 451, 893–895. [Google Scholar] [CrossRef]
- Ivanova, K.; Ausloos, M. Application of the Detrended Fluctuation Analysis (DFA) Method for Describing Cloud Breaking. Phys. A 1999, 274, 349–354. [Google Scholar] [CrossRef]
- Kutner, R.; Ausloos, M.; Grech, D.; Di Matteo, T.; Schinckus, C.; Stanley, H.E. Manifesto for a Post-Pandemic Modeling. Phys. A 2019, 516, 240–253. [Google Scholar] [CrossRef]
- Simon, J.H. The Economic Consequences of Immigration; The University of Michigan Press: Ann Arbor, MI, USA, 1999; ISBN 978-0472086160. [Google Scholar]
- Drazin, P.G. Nonlinear Systems; Cambridge University Press: Cambridge, UK, 1992; ISBN 0-521-40489-4. [Google Scholar]
- Dimitrova, Z.I. Numerical Investigation of Nonlinear Waves Connected to Blood Flow in an Elastic Tube with Variable Radius. J. Theor. Appl. Mech. 2015, 45, 79–92. [Google Scholar] [CrossRef]
- Kawasaki, K.; Ohta, T. Kink Dynamics in One-Dimensional Nonlinear Systems. Phys. A 1982, 116, 573–593. [Google Scholar] [CrossRef]
- Dimitrova, Z. On Traveling Waves in Lattices: The Case of Riccati Lattices. J. Theor. Appl. Mech. 2012, 42, 3–22. [Google Scholar] [CrossRef]
- Ganji, D.D.; Sabzehmeidani, Y.; Sedighiamiri, A. Nonlinear Systems in Heat Transfer; Elsevier: Amsterdam, The Netherlands, 2018; ISBN 978-0-12-812024-8. [Google Scholar]
- Kantz, H.; Schreiber, T. Nonlinear Time Series Analysis; Cambridge University Press: Cambridge, UK, 2004; ISBN 978-0511755798. [Google Scholar]
- Verhulst, F. Nonlinear Differential Equations and Dynamical Systems; Springer: Berlin, Germany, 2006; ISBN 978-3-540-60934-6. [Google Scholar]
- Mills, T. Applied Time Series Analysis; Academic Press: London, UK, 2019; ISBN 978-012-813117-6. [Google Scholar]
- Struble, R. Nonlinear Differential Equations; Dover: New York, NY, USA, 2018; ISBN 978-0486817545. [Google Scholar]
- Vitanov, N.K.; Dimitrova, Z.I.; Ausloos, M. Verhulst-Lotka-Volterra Model of Ideological Struggle. Phys. A 2010, 389, 4970–4980. [Google Scholar] [CrossRef]
- Grossberg, S. Nonlinear Neural Networks: Principles, Mechanisms, and Architectures. Neural Netw. 1981, 1, 17–61. [Google Scholar] [CrossRef]
- Hopf, E. The Partial Differential Equation: ut + uux = ϵuxx. Commun. Pure Appl. Math. 1950, 3, c201–c230. [Google Scholar] [CrossRef]
- Cole, J.D. On a Quasi-Linear Parabolic Equation Occurring in Aerodynamics. Q. Appl. Math. 1951, 9, 225–236. [Google Scholar] [CrossRef]
- Gardner, C.S.; Greene, J.M.; Kruskal, M.D.; Miura, R.R. Method for Solving the Korteweg-de Vries Equation. Phys. Rev. Lett. 1967, 19, 1095–1097. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Kaup, D.J.; Newell, A.C.; Segur, H. The Inverse Scattering Transform—Fourier Analysis for nonlinear problems. Stud. Appl. Math. 1974, 53, 249–315. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Clarkson, P.A. Solitons, Nonlinear Evolution Equations and Inverse Scattering; Cambridge University Press: Cambridge, UK, 1991; ISBN 978-0511623998. [Google Scholar]
- Hirota, R. Exact Solution of the Korteweg—De Vries Equation for Multiple Collisions of Solitons. Phys. Rev. Lett. 1971, 27, 1192–1194. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory; Cambridge University Press: Cambridge, UK, 2004; ISBN 978-0511543043. [Google Scholar]
- Tabor, M. Chaos and Integrability in Dynamical Systems; Wiley: New York, NY, USA, 1989; ISBN 978-0471827283. [Google Scholar]
- Carrielo, F.; Tabor, M. Similarity Reductions from Extended Painleve Expansions for Nonintegrable Evolution Equations. Phys. D 1991, 53, 59–70. [Google Scholar] [CrossRef]
- Carrielo, F.; Tabor, M. Painleve Expansions for Nonintegrable Evolution Equations. Phys. D 1989, 39, 77–94. [Google Scholar] [CrossRef]
- Weiss, J.; Tabor, M.; Carnevalle, G. The Painleve Property for Partial Differential Equations. J. Math. Phys. 1983, 24, 522–526. [Google Scholar] [CrossRef]
- Kudryashov, N.A. On Types of Nonlinear Nonintegrable Equations with Exact Solutions. Phys. Lett. A 1991, 155, 269–275. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Simplest Equation Method to Look for Exact Solutions of Nonlinear Differential Equations. Chaos Solitons Fractals 2005, 24, 1217–1231. [Google Scholar] [CrossRef]
- Kudryashov, N.A.; Loguinova, N.B. Extended Simplest Equation Method for Nonlinear Differential Equations. Appl. Math. Comput. 2008, 205, 361–365. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Partial Differential Equations with Solutions Having Movable First-Order Singularities. Phys. Lett. A 1992, 169, 237–242. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Exact Solitary Waves of the Fisher Equation. Phys. Lett. A 2005, 342, 99–106. [Google Scholar] [CrossRef]
- Kudryashov, N.A. One Method for Finding Exact Solutions of Nonlinear Differential Equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 2248–2253. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Exact Soliton Solutions of the Generalized Evolution Equation of Wave Dynamics. J. Appl. Math. Mech. 1988, 52, 361–365. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Exact Solutions of Nonlinear Wave Equations Arising in Mechanics. J. Appl. Math. Mech. 1990, 54, 372–375. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Exact Solutions and Integrability of the Duffing—Van der Pol Equation. Regul. Chaotic Dyn. 2018, 23, 471–479. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Exact Solutions of the Equation for Surface waves in a Convecting Fluid. Appl. Math. Comput. 2019, 344–345, 97–106. [Google Scholar] [CrossRef]
- Kudryashov, N.A. A Generalized Model for Description of Propagation Pulses in Optical Fiber. Optik 2019, 189, 42–52. [Google Scholar] [CrossRef]
- Kudryashov, N.A. First Integrals and Solutions of the Traveling Wave Reduction for the Triki–Biswas Equation. Optik 2019, 185, 275–281. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Highly Dispersive Optical Solitons of the Generalized Nonlinear Eighth-Order Schrödinger Equation. Optik 2020, 206, 164335. [Google Scholar] [CrossRef]
- Kudryashov, N.A. The Generalized Duffing Oscillator. Commun. Nonlinear Sci. Numer. Simul. 2021, 93, 105526. [Google Scholar] [CrossRef]
- Urbain, F.; Kudryashov, N.A.; Tala-Tebue, E.; Malwe, H.B.; Doka, S.Y.; Kofane, T.C. Exact Solutions of the KdV Equation with Dual-Power Law Nonlinearity. Comput. Math. Math. Phys. 2021, 61, 431–435. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Solitary waves of the generalized Sasa-Satsuma equation with arbitrary refractive index. Optik 2021, 232, 166540. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Dimitrova, Z.I.; Vitanov, K.N. Simple Equations Method (SEsM): Algorithm, Connection with Hirota Method, Inverse Scattering Transform Method, and Several Other Methods. Entropy 2021, 23, 10. [Google Scholar] [CrossRef]
- Vitanov, N.K. Recent Developments of the Methodology of the Modified Method of Simplest Equation with Application. Pliska Stud. Math. Bulg. 2019, 30, 29–42. [Google Scholar]
- Vitanov, N.K. Modified Method of Simplest Equation for Obtaining Exact Solutions of Nonlinear Partial Differential Equations: History, recent development and studied classes of equations. J. Theor. Appl. Mech. 2019, 49, 107–122. [Google Scholar] [CrossRef]
- Vitanov, N.K. The Simple Equations Method (SEsM) for Obtaining Exact Solutions of Nonlinear PDEs: Opportunities Connected to the Exponential Functions. AIP Conf. Proc. 2019, 2159, 030038. [Google Scholar]
- Vitanov, N.K.; Dimitrova, Z.I. Simple Equations Method (SEsM) and Other Direct Methods for Obtaining Exact Solutions of Nonlinear PDEs. AIP Conf. Proc. 2019, 2159, 030039. [Google Scholar]
- Martinov, N.; Vitanov, N. On the Correspondence Between the Self-consistent 2D Poisson–Boltzmann Structures and the Sine-Gordon Waves. J. Phys. A Math. Gen. 1992, 25, L51–L56. [Google Scholar] [CrossRef]
- Martinov, N.; Vitanov, N. On Some Solutions of the Two-Dimensional Sine-Gordon Equation. J. Phys. A Math. Gen. 1992, 25, L419–L426. [Google Scholar] [CrossRef]
- Vitanov, N.K. On Travelling Waves and Double-Periodic Structures in Two-Dimensional Sine–Gordon Systems. J. Phys. A Math. Gen. 1996, 29, 5195–5207. [Google Scholar] [CrossRef]
- Vitanov, N.K. Breather and Soliton Wave Families for the Sine-Gordon Equation. Proc. R. Soc. Lond. A 1998, 454, 2409–2423. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Jordanov, I.P.; Dimitrova, Z.I. On Nonlinear Dynamics of Interacting Populations: Coupled Kink Waves in a System of Two Populations. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 2379–2388. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Jordanov, I.P.; Dimitrova, Z.I. On Nonlinear Population Waves. Appl. Math. Comput. 2009, 215, 2950–2964. [Google Scholar] [CrossRef]
- Vitanov, N.K. Application of Simplest Equations of Bernoulli and Riccati Kind for Obtaining Exact Traveling-Wave Solutions for a Class of PDEs with Polynomial Nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 2050–2060. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Dimitrova, Z.I. Application of the Method of Simplest Equation for Obtaining Exact Traveling-Wave Solutions for Two Classes of Model PDEs from Ecology and Population Dynamics. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 2836–2845. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Dimitrova, Z.I.; Kantz, H. Modified Method of Simplest Equation and its Application to Nonlinear PDEs. Appl. Math. Comput. 2010, 216, 2587–2595. [Google Scholar] [CrossRef]
- Vitanov, N.K. Modified Method of Simplest Equation: Powerful Tool for Obtaining Exact and Approximate Traveling-Wave Solutions of Nonlinear PDEs. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1176–1185. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Dimitrova, Z.I.; Vitanov, K.N. On the Class of Nonlinear PDEs That Can be Treated by the Modified Method of Simplest Equation. Application to Generalized Degasperis–Processi Equation and B-Equation. Commun. Nonlinear Sci. Numer. Simul 2011, 16, 3033–3044. [Google Scholar] [CrossRef]
- Vitanov, N.K. On Modified Method of Simplest Equation for Obtaining Exact and Approximate Solutions of Nonlinear PDEs: The Role of the Simplest Equation. Commun. Nonlinear Sci. Numer. Simul 2011, 16, 4215–4231. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Dimitrova, Z.I.; Kantz, H. Application of the Method of Simplest Equation for Obtaining Exact Traveling-Wave Solutions for the Extended Korteweg—De Vries Equation and Generalized Camassa–Holm Equation. Appl. Math. Comput. 2013, 219, 7480–7492. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Dimitrova, Z.I. Solitary Wave Solutions for Nonlinear Partial Differential Equations that Contain Monomials of Odd and Even Grades with Respect to Participating Derivatives. Appl. Math. Comput. 2014, 247, 213–217. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Dimitrova, Z.I.; Vitanov, K.N. Modified Method of Simplest Equation for Obtaining Exact Analytical Solutions of Nonlinear Partial Differential Equations: Further Development of the Methodology with Applications. Appl. Math. Comput. 2015, 269, 363–378. [Google Scholar] [CrossRef]
- Vitanov, N.K.; Dimitrova, Z.I.; Ivanova, T.I. On Solitary Wave Solutions of a Class of Nonlinear Partial Differential Equations Based on the Function 1/cosh(αx + βt)n. Appl. Math. Comput. 2017, 315, 372–380. [Google Scholar]
- Vitanov, N.K.; Dimitrova, Z.I. Modified Method of Simplest Equation Applied to the Nonlinear Schrödinger Equation. J. Theor. Appl. Mech. 2018, 48, 59–68. [Google Scholar] [CrossRef]
- Dimitrova, Z.I.; Vitanov, N.K. Travelling Waves Connected to Blood Flowand Motion of Arterial Walls. In Water in Biomechanical and Related Systems; Gadomski, A., Ed.; Springer: Cham, Switzerland, 2021; pp. 243–263. ISBN 978-3-030-67226-3. [Google Scholar]
- Vitanov, N.K. Simple Equations Method (SEsM) and Its Connection with the Inverse Scattering Transform Method. AIP Conf. Proc. 2021, 2321, 030035. [Google Scholar]
- Vitanov, N.K.; Dimitrova, Z.I. Simple Equations Method (SEsM) and Its Particular Cases: Hirota Method. AIP Conf. Proc. 2021, 2321, 030036. [Google Scholar]
- Dimitrova, Z.I.; Vitanov, K.N. Homogeneous Balance Method and Auxiliary Equation Method as Particular Cases of Simple Equations Method (SEsM). AIP Conf. Proc. 2021, 2321, 030004. [Google Scholar]
- Constantine, G.M.; Savits, T.H. A Multivariate Faa di Bruno Formula with Applications. Trans. Am. Math. Soc. 1996, 348, 503–520. [Google Scholar] [CrossRef]
- Fan, E.; Zhang, H. A note on the homogeneous balance method. Phys. Lett. A 1998, 246, 403–406. [Google Scholar] [CrossRef]
- Malfliet, W.; Hereman, W. The tahn method I: Exact solutions of nonlinear evolution and wave equations. Phys. Scr. 1996, 54, 563–568. [Google Scholar] [CrossRef]
- Liu, S.; Fu, Z.; Liu, S.; Zhao, Q. Jacobi elliptic function expansion method and periodic wave solutions of nonlinear wave equations. Phys. Lett. A 2001, 289, 69–74. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, M.; Wang, Y. Periodic wave solutions to a coupled KdV equations with variable coefficients. Phys. Lett. A 2003, 308, 31–36. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vitanov, N.K.; Dimitrova, Z.I.; Vitanov, K.N. On the Use of Composite Functions in the Simple Equations Method to Obtain Exact Solutions of Nonlinear Differential Equations. Computation 2021, 9, 104. https://doi.org/10.3390/computation9100104
Vitanov NK, Dimitrova ZI, Vitanov KN. On the Use of Composite Functions in the Simple Equations Method to Obtain Exact Solutions of Nonlinear Differential Equations. Computation. 2021; 9(10):104. https://doi.org/10.3390/computation9100104
Chicago/Turabian StyleVitanov, Nikolay K., Zlatinka I. Dimitrova, and Kaloyan N. Vitanov. 2021. "On the Use of Composite Functions in the Simple Equations Method to Obtain Exact Solutions of Nonlinear Differential Equations" Computation 9, no. 10: 104. https://doi.org/10.3390/computation9100104
APA StyleVitanov, N. K., Dimitrova, Z. I., & Vitanov, K. N. (2021). On the Use of Composite Functions in the Simple Equations Method to Obtain Exact Solutions of Nonlinear Differential Equations. Computation, 9(10), 104. https://doi.org/10.3390/computation9100104