Nonlinear-Adaptive Mathematical System Identification


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.3. Formulation of the Problem of Interest for This Investigation
1.4. Contribution of This Study
1.5. Organization of the Paper
2. Materials and Methods
2.1. Minimum Phase System
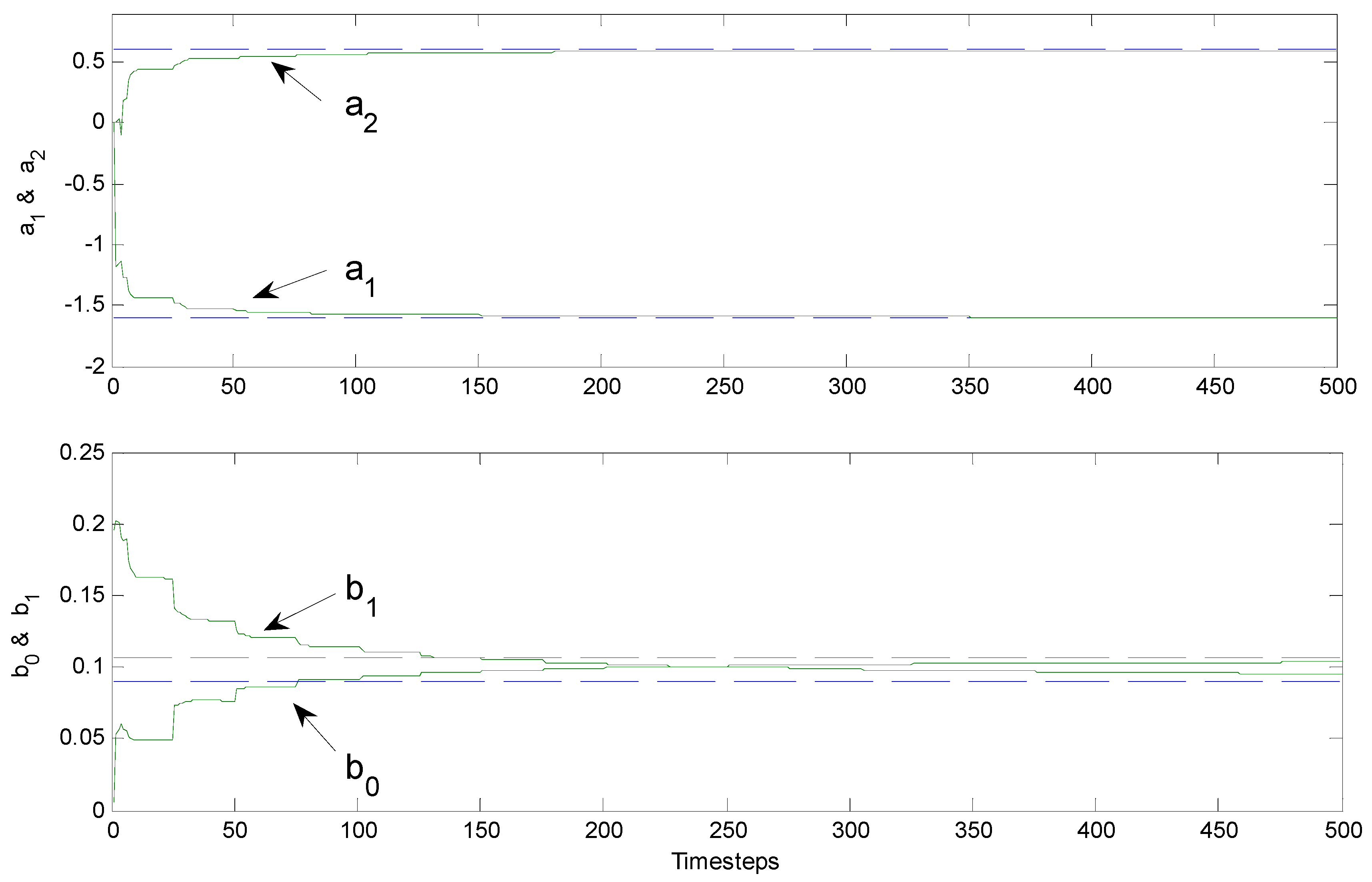
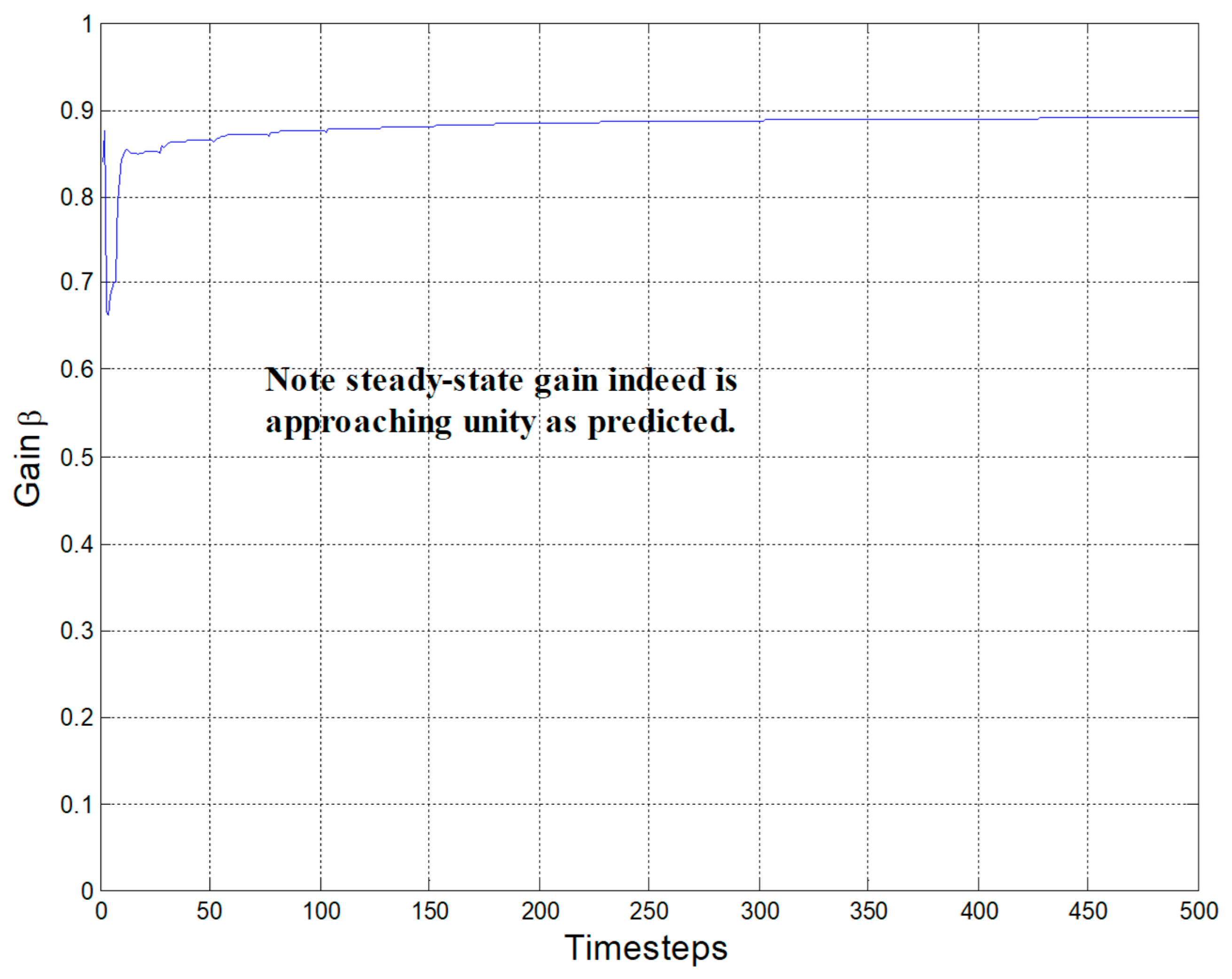
2.1.1. Parameterization
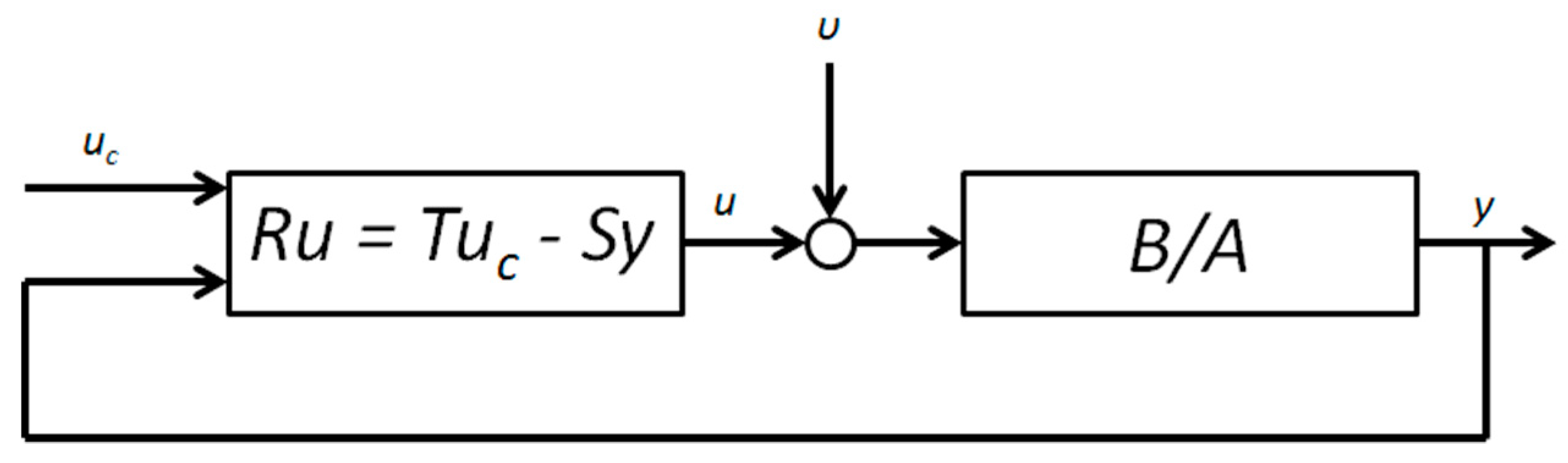
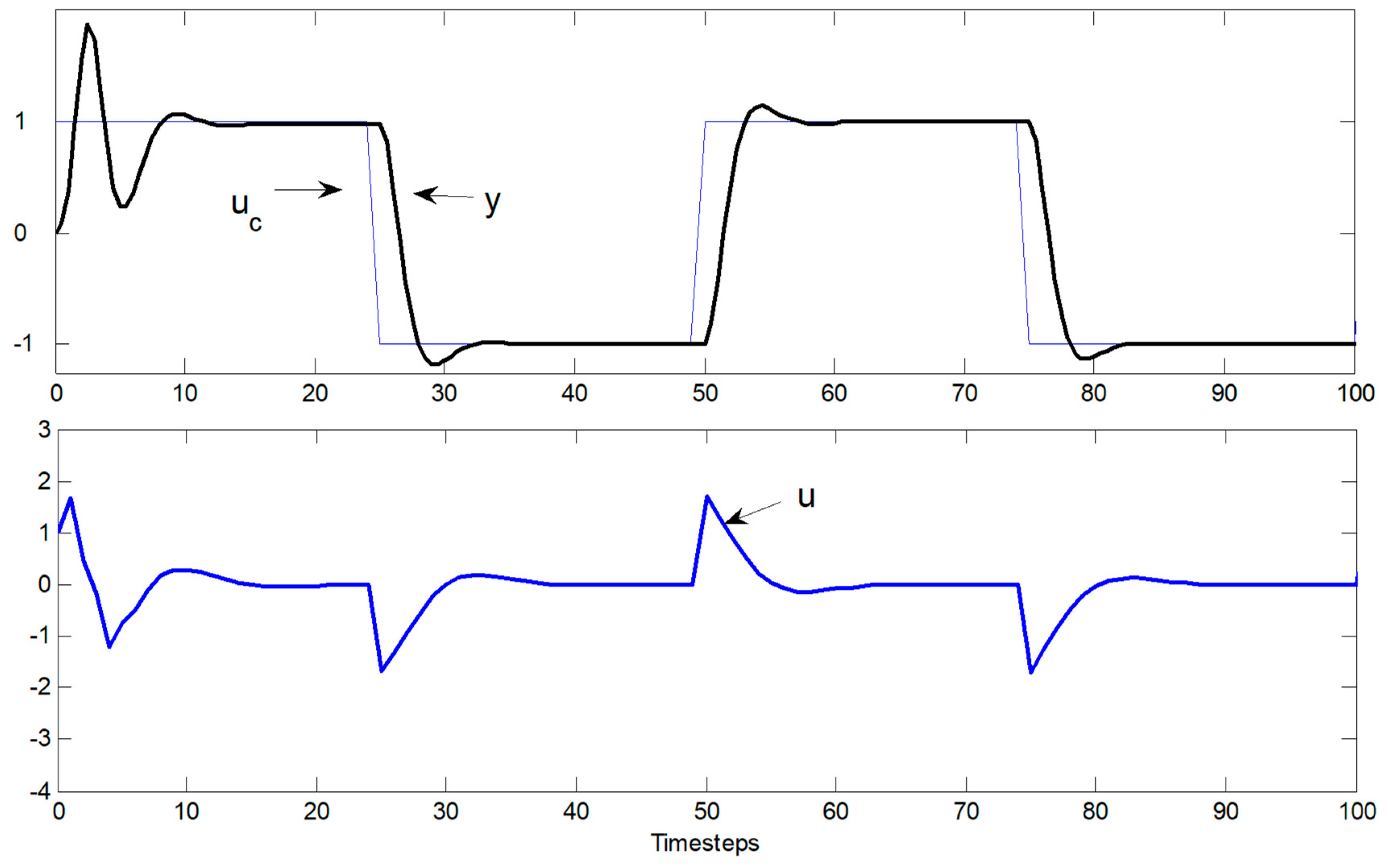
2.1.2. Indirect Self-Tuner Feedback Control
2.1.3. Indirect Self-Tuner Feedforward Control
2.2. Non-Minimum Phase Plant Model
2.3. Direct Self-Tuner with Increased Plant Pole Excess (d0 = 2)
2.3.1. Modified Plant Model
2.3.2. Direct Self-Tuning Regulators
3. Brief Discussion of Results
4. Summary and Conclusions
Conflicts of Interest
References
- Astrom, K.; Wittenmark, B. Adaptive Control, 2nd ed.; Addison Wesley Longman: Boston, MA, USA, 1995. [Google Scholar]
- Shorey, T.; Tijdeman, R. Exponential Diophantine equations. In Cambridge Tracts in Mathematics; Cambridge University Press: Cambridge, UK, 1986. [Google Scholar]
- Bézout, É. Theorie Generale Des Equations Algebriques (1779); Kessinger Publishing: Whitefish, MT, USA, 2010. [Google Scholar]
- Bhau, D. Brief Notes on the Age and Authenticity of the Works of Aryabhata, Varahamihira, Brahmagupta, Bhattotpala, and Bhaskaracharya. J. R. Asiat. Soc. G. B. Irel. 1865, 1, 392–418. [Google Scholar]
- Schoukens, M.; Noël, J.P. Three Benchmarks Addressing Open Challenges in Nonlinear System Identification. In Proceedings of the 20th World Congress of the International Federation of Automatic Control, Toulouse, France, 9–14 July 2017; pp. 448–453. [Google Scholar]
- Schoukens, M.; Noël, J.P. Wiener-Hammerstein benchmark with process noise. In Proceedings of the Workshop on Nonlinear System Identification Benchmarks, Brussels, Belgium, 25–27 April 2016; pp. 15–19. [Google Scholar]
- Nonlinear System Identification Benchmarks. Available online: http://www.nonlinearbenchmark.org/ (accessed on 28 November 2017).
- Bouc, R. Forced vibration of mechanical systems with hysteresis. In Proceedings of the Fourth Conference on Nonlinear Oscillation, Prague, Czech Republic, 5–9 September 1967; p. 315. [Google Scholar]
- Noël, J.P.; Schoukens, M. Hysteretic benchmark with a dynamic nonlinearity. In Proceedings of the Workshop on Nonlinear System Identification Benchmarks, Brussels, Belgium, 25–27 April 2016; pp. 7–14. [Google Scholar]
- Schoukens, M.; Marconato, A.; Pintelon, R.; Vandersteen, G.; Rolain, Y. Parametric identification of parallel Wiener–Hammerstein systems. Automatica 2015, 51, 111–122. [Google Scholar] [CrossRef]
- Wigren, T.; Schoukens, J. Three free data sets for development and benchmarking in nonlinear system identification. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 2933–2938. [Google Scholar]
- Sands, T.A. Fine Pointing of Military Spacecraft. Ph.D. Dissertation, Naval Postgraduate School, Monterey, CA, USA, 2007. [Google Scholar]
- Sands, T.; Lorenz, R. Physics-Based Automated Control of Spacecraft. In Proceedings of the AIAA Space Conference & Exposition, Pasadena, CA, USA, 14–17 September 2009. [Google Scholar]
- Sands, T.A. Physics-Based Control Methods. In Advances in Spacecraft Systems and Orbit Determination; InTech Publishers: London, UK, 2012; pp. 29–54. [Google Scholar]
- Nakatani, S.; Sands, T. Simulation of Spacecraft Damage Tolerance and Adaptive Controls. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014. [Google Scholar] [CrossRef]
- Sands, T. Improved Magnetic Levitation via Online Disturbance Decoupling. Phys. J. 2015, 1, 272–280. [Google Scholar]
- Nakatani, S.; Sands, T. Autonomous Damage Recovery in Space. Int. J. Autom. Control Intell. Syst. 2016, 2, 23–36. [Google Scholar]
- Heidlauf, P.; Cooper, M. Nonlinear Lyapunov Control Improved by an Extended Least Squares Adaptive Feed Forward Controller and Enhanced Luenberger Observer. In Proceedings of the International Conference and Exhibition on Mechanical & Aerospace Engineering, Las Vegas, NV, USA, 2–4 October 2017. [Google Scholar]
- Cooper, M.; Heidlauf, P.; Sands, T. Controlling Chaos—Forced van der Pol Equation. Mathematics 2017, 5, 70. [Google Scholar] [CrossRef]
- Sands, T. Phase Lag Elimination at All Frequencies for Full State Estimation of Spacecraft Attitude. Phys. J. 2017, 3. (accepted). [Google Scholar]
- Ljung, L. System identification. In Signal Analysis and Prediction; Birkhauser: Boston, MA, USA, 1998; pp. 163–173. [Google Scholar]
- Pappalardo, C.M.; Guida, D. Adjoint-based Optimization Procedure for Active Vibration Control of Nonlinear Mechanical Systems. ASME J. Dyn. Syst. Meas. Control 2017, 139, 081010. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. Control of Nonlinear Vibrations using the Adjoint Method. Meccanica 2017, 52, 2503–2526. [Google Scholar] [CrossRef]
- Juang, J.N.; Phan, M.Q. Identification and Control of Mechanical Systems; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Guida, D.; Nilvetti, F.; Pappalardo, C.M. Parameter Identification of a Two Degrees of Freedom Mechanical System. Int. J. Mech. 2009, 3, 23–30. [Google Scholar]
- Guida, D.; Pappalardo, C.M. Sommerfeld and Mass Parameter Identification of Lubricated Journal Bearing. WSEAS Trans. Appl. Theor. Mech. 2009, 4, 205–214. [Google Scholar]
- Liu, G.P. Nonlinear Identification and Control: A Neural Network Approach; Springer Science & Business Media: Berlin, Germany, 2012; ISBN 978-1-4471-0345-5. [Google Scholar]
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sands, T. Nonlinear-Adaptive Mathematical System Identification. Computation 2017, 5, 47. https://doi.org/10.3390/computation5040047
Sands T. Nonlinear-Adaptive Mathematical System Identification. Computation. 2017; 5(4):47. https://doi.org/10.3390/computation5040047
Chicago/Turabian StyleSands, Timothy. 2017. "Nonlinear-Adaptive Mathematical System Identification" Computation 5, no. 4: 47. https://doi.org/10.3390/computation5040047
APA StyleSands, T. (2017). Nonlinear-Adaptive Mathematical System Identification. Computation, 5(4), 47. https://doi.org/10.3390/computation5040047