


Quadrotor Trajectory Tracking Using Model Reference Adaptive Control, Neural Network-Based Parameter Uncertainty Compensator, and Different Plant Parameterizations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (d1)
- A simplified model of the quadrotor with time-invariant parameters of mass and inertia moments is used.
- (d2)
- The explicit equation of the parameter uncertainty to be compensated is not presented, as well as the numerical simulation results, which compare the outputs of the proposed compensator with the ones of such equation. This makes it difficult to understand to what extent the uncertainty has been compensated.
- (d3)
- The baseline controller is chosen arbitrarily but not as a result of the synthesis procedure.
- (d4)
- Baseline controller has time-invariant parameters, and plant parameterization, under which it can also be adjustable, is not considered.
- (c1)
- The explicit equations of the parameter uncertainty are derived for the quadrotor trajectory tracking problem for two cases, when control signals are (i) used and (ii) not used in the parametric uncertainty parameterization;
- (c2)
- Using (c1), the application of NN-based uncertainty compensator and signals included into its input vector are justified;
- (c3)
- The MRAC-based schemes are implemented with the baseline controller of a type (in two variants, with time-invariant and adjustable and ) and the NN-based compensator of the paramtric uncertainty, in which the parameters of both output and hidden layers are adjusted in real time.
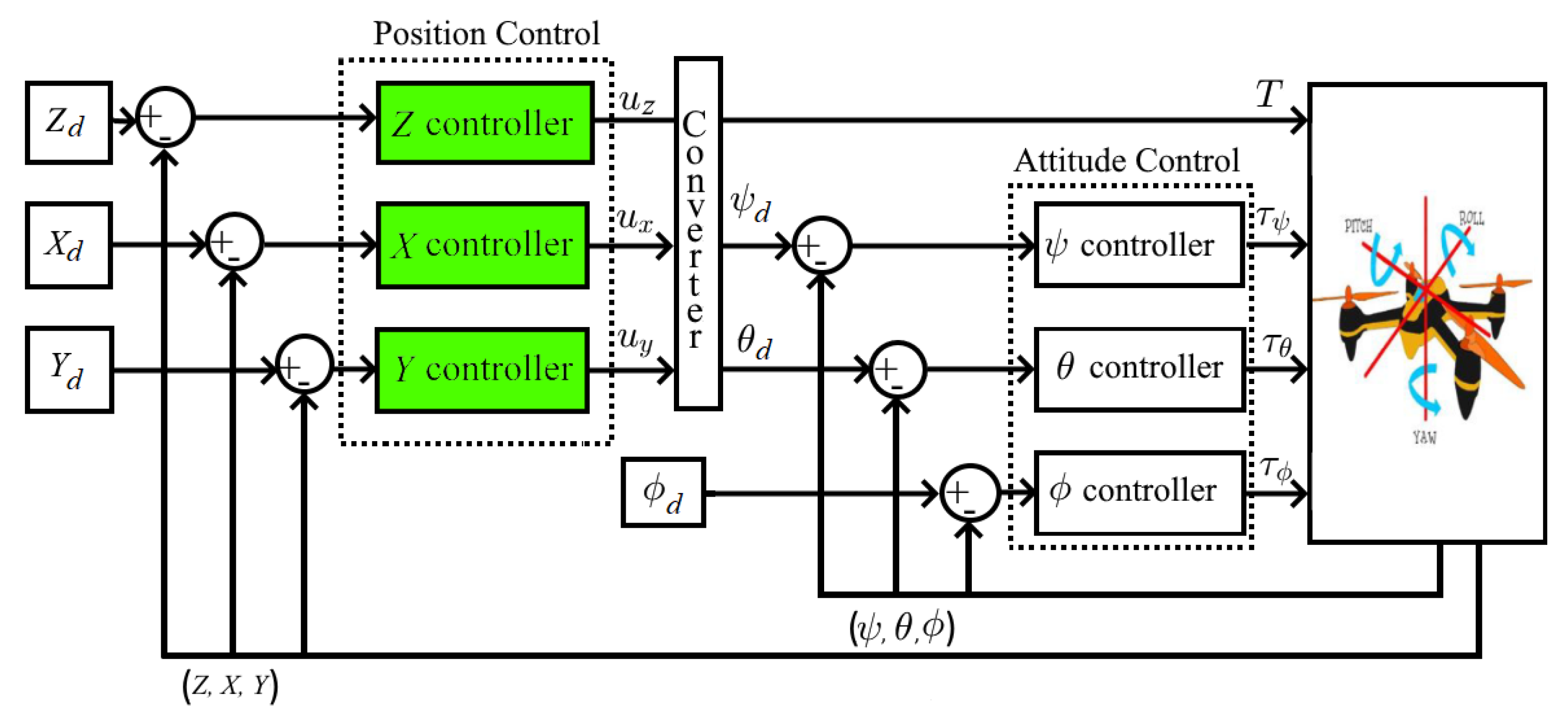
2. Problem Statement and Methods
2.1. Mathematical Model of Quadrotor
2.2. Trajectory Tracking Control Problem
3. Main Result
3.1. Uncertainty Parameterization
3.1.1. Case I: Control Signals Are Directly Used in Uncertainty Parameterization
3.1.2. Case II: Control Signals Are Not Used in Uncertainty Parameterization
3.1.3. Representation of Plant in State-Space Form
3.2. MRAC System with NN-Based Compensator
3.2.1. Reference Model
3.2.2. Plant Representation: Neural Network Description
3.2.3. MRAC System Design
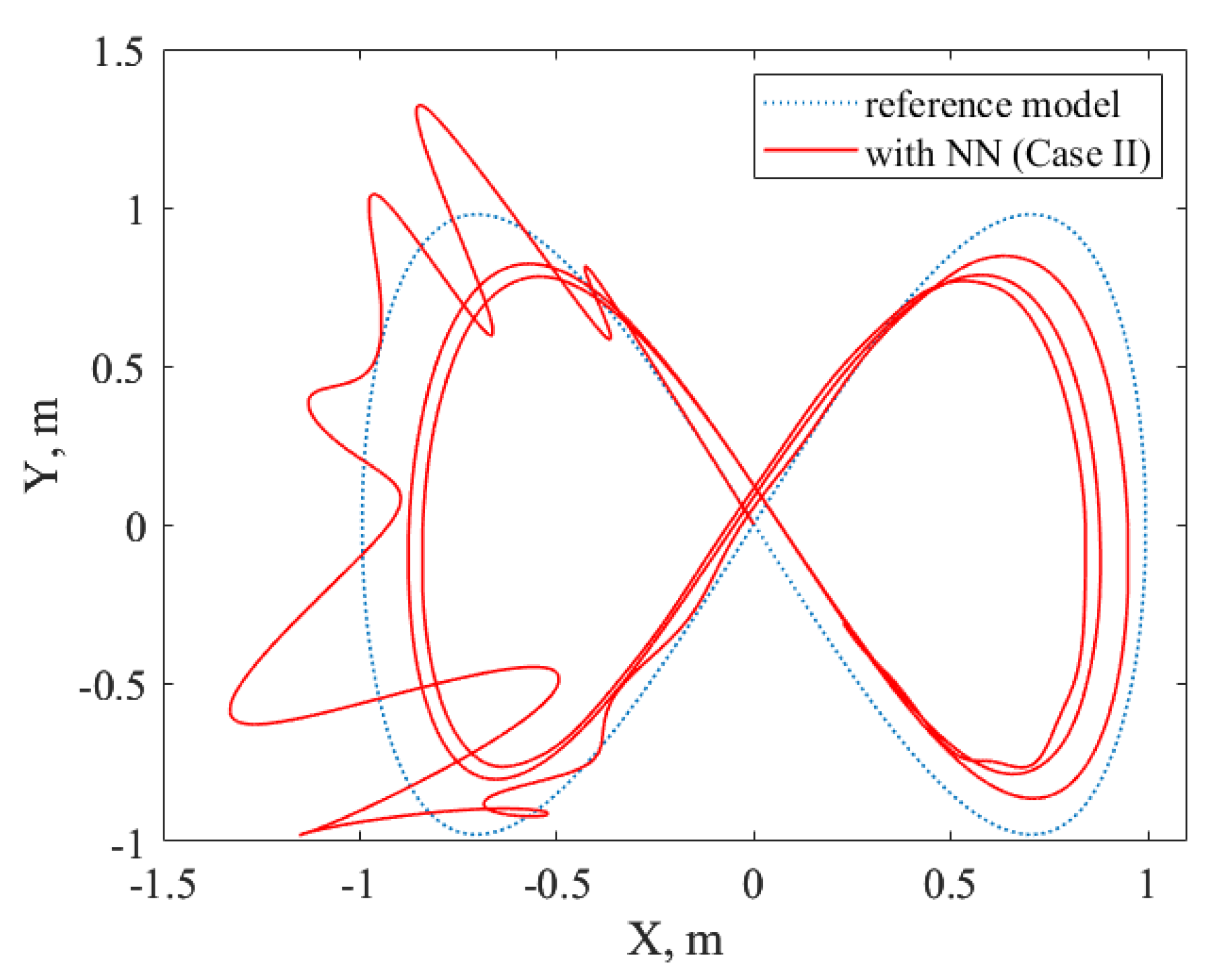
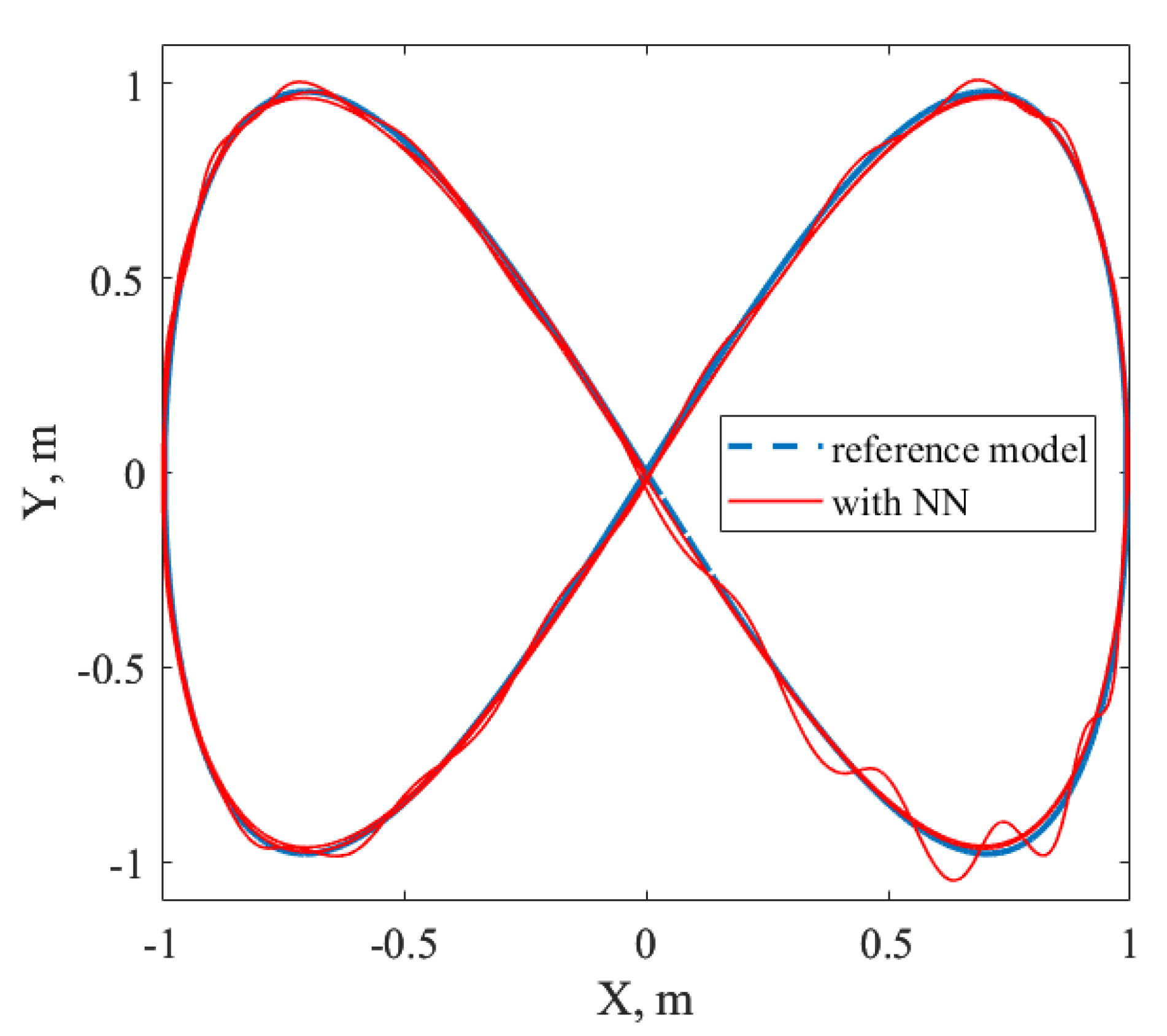
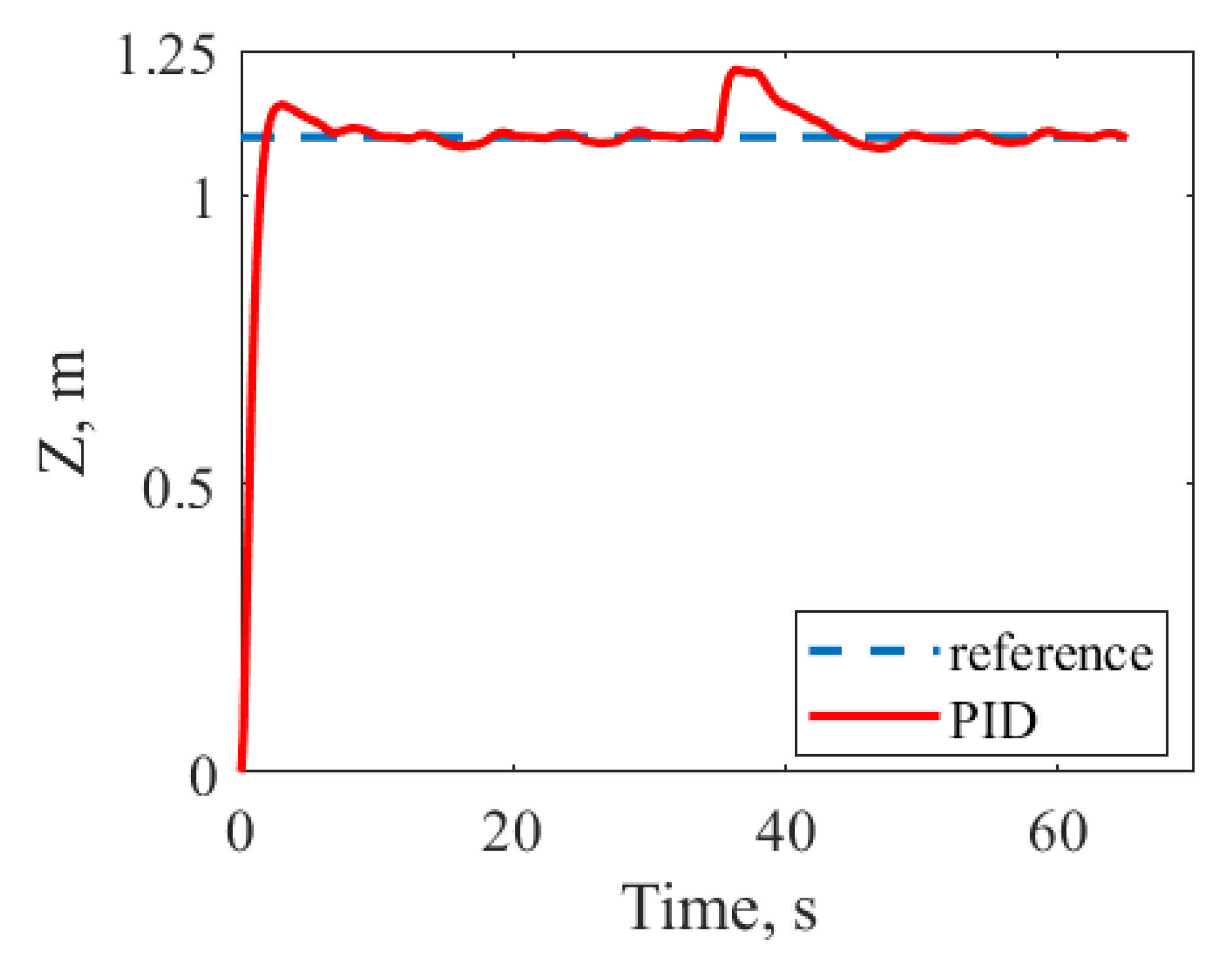
3.3. Numerical Experiments and Discussion
- (r1)
- Despite the fact that systems designed on the basis of Case I and Case II parameterizations had the same theoretical properties, the MRAC system with the NN-compesator with time-invariant baseline controller parameters allowed us to obtain better results in comparison with the adjustable baseline controller.
- (r2)
- The system on the basis of PID-controllers was not able to fully compensate for the parametric uncertainty.
- (r3)
- The simple combination of the PID-based control system with the NN-based compensator did not allow us to obtain the same results as the proposed approach. So, the baseline controller should be derived on the basis of the MRAC design procedure and have the form . Moreover, as far as Case I parameterization is considered, the values of and can be directly computed.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Glushchenko, A.; Lastochkin, K. Neural Network Based Parameter Uncertainty Compensation to Solve Quadrotor Trajectory Tracking Problem. In Proceedings of the 2022 4th International Conference on Control Systems, Mathematical Modeling, Automation and Energy Efficiency (SUMMA), Lipetsk, Russia, 9–11 November 2022; pp. 443–448. [Google Scholar]
- Nascimento, T.P.; Saska, M. Position and attitude control of multi-rotor aerial vehicles: A survey. Annu. Rev. Control 2019, 48, 129–146. [Google Scholar] [CrossRef]
- Fan, F.; Lin, M.; Ding, R.; Zheng, Z.; Liu, Y. Augmented-MRAC for quadrotor UAVs with parameter change. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 501–506. [Google Scholar]
- Glushchenko, A.; Lastochkin, K. Neural Network-based Direct Model Reference Adaptive Control of Quadrotor Attitude. In Proceedings of the 2022 16th International Conference on Stability and Oscillations of Nonlinear Control Systems (Pyatnitskiy’s Conference), Moscow, Russia, 1–3 June 2022; pp. 1–4. [Google Scholar]
- Liu, C.; Pan, J.; Chang, Y. PID and LQR trajectory tracking control for an unmanned quadrotor helicopter: Experimental studies. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 10845–10850. [Google Scholar]
- Voos, H. Nonlinear state-dependent Riccati equation control of a quadrotor UAV. In Proceedings of the 2006 IEEE International Conference on Control Applications, Munich, Germany, 4–6 October 2006; pp. 2547–2552. [Google Scholar]
- Madani, T.; Benallegue, A. Control of a quadrotor mini-helicopter via full state backstepping technique. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 1515–1520. [Google Scholar]
- Altug, E.; Ostrowski, J.P.; Taylor, C.J. Control of a quadrotor helicopter using dual camera visual feedback. Int. J. Robot. Res. 2005, 24, 329–341. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Z.; Zhang, X.; Sun, Q.; Sun, M. A novel control scheme for quadrotor UAV based upon active disturbance rejection control. Aerosp. Sci. Technol. 2018, 79, 601–609. [Google Scholar] [CrossRef]
- Abdul Ghaffar, A.F.; Richardson, T.S. Position tracking of an underactuated quadrotor using model reference adaptive control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, AIAA SciTech, San Diego, CA, USA, 4–8 January 2016; pp. 1–13. [Google Scholar]
- Jin, X.Z.; He, T.; Wu, X.M.; Wang, H.; Chi, J. Robust adaptive neural network-based compensation control of a class of quadrotor aircrafts. J. Frankl. Inst. 2020, 357, 12241–12263. [Google Scholar] [CrossRef]
- Dierks, T.; Jagannathan, S. Output feedback control of a quadrotor UAV using neural networks. IEEE Trans. Neural Netw. 2010, 21, 50–66. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Chen, B.; Lin, C. Fixed-time Backstepping control of quadrotor trajectory tracking based on neural network. IEEE Access 2020, 8, 177092–177099. [Google Scholar] [CrossRef]
- Barron, A.R. Universal approximation bounds for superpositions of a sigmoidal function. IEEE Trans. Inf. Theory 1993, 39, 930–945. [Google Scholar] [CrossRef]
- Lopez-Sanchez, I.; Perez-Alcocer, R.; Moreno-Valenzuela, J. Trajectory tracking double two-loop adaptive neural network control for a Quadrotor. J. Frankl. Inst. 2023, 360, 3770–3799. [Google Scholar] [CrossRef]
- Doukhi, O.; Lee, D.J. Neural network-based robust adaptive certainty equivalent controller for quadrotor UAV with unknown disturbances. Int. J. Control Autom. Syst. 2019, 17, 2365–2374. [Google Scholar] [CrossRef]
- Choutri, K.; Lagha, M.; Dala, L.; Lipatov, M. Quadrotors trajectory tracking using a differential flatness-quaternion based approach. In Proceedings of the 2017 7th International Conference on Modeling, Simulation, and Applied Optimization (ICMSAO), Sharjah, United Arab Emirates, 4–6 April 2017; pp. 1–5. [Google Scholar]
- Funahashi, K.; Nakamura, Y. Approximation of Dynamical Systems by Continuous Time Recurrent Neural Networks. Neural Netw. 1993, 6, 801–806. [Google Scholar] [CrossRef]
- Nguyen, N.T. Model-Reference Adaptive Control—A Primer; Springer International Publishing: London, UK, 2018. [Google Scholar]
- Na, J.; Herrmann, G.; Zhang, K. Improving transient performance of adaptive control via a modified reference model and novel adaptation. Int. J. Robust Nonlinear Control 2017, 27, 1351–1372. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glushchenko, A.; Lastochkin, K. Quadrotor Trajectory Tracking Using Model Reference Adaptive Control, Neural Network-Based Parameter Uncertainty Compensator, and Different Plant Parameterizations. Computation 2023, 11, 163. https://doi.org/10.3390/computation11080163
Glushchenko A, Lastochkin K. Quadrotor Trajectory Tracking Using Model Reference Adaptive Control, Neural Network-Based Parameter Uncertainty Compensator, and Different Plant Parameterizations. Computation. 2023; 11(8):163. https://doi.org/10.3390/computation11080163
Chicago/Turabian StyleGlushchenko, Anton, and Konstantin Lastochkin. 2023. "Quadrotor Trajectory Tracking Using Model Reference Adaptive Control, Neural Network-Based Parameter Uncertainty Compensator, and Different Plant Parameterizations" Computation 11, no. 8: 163. https://doi.org/10.3390/computation11080163
APA StyleGlushchenko, A., & Lastochkin, K. (2023). Quadrotor Trajectory Tracking Using Model Reference Adaptive Control, Neural Network-Based Parameter Uncertainty Compensator, and Different Plant Parameterizations. Computation, 11(8), 163. https://doi.org/10.3390/computation11080163