
Numerical Study on Surface Reconstruction and Roughness of Magnetorheological Elastomers



Abstract
1. Introduction
2. Model and Method
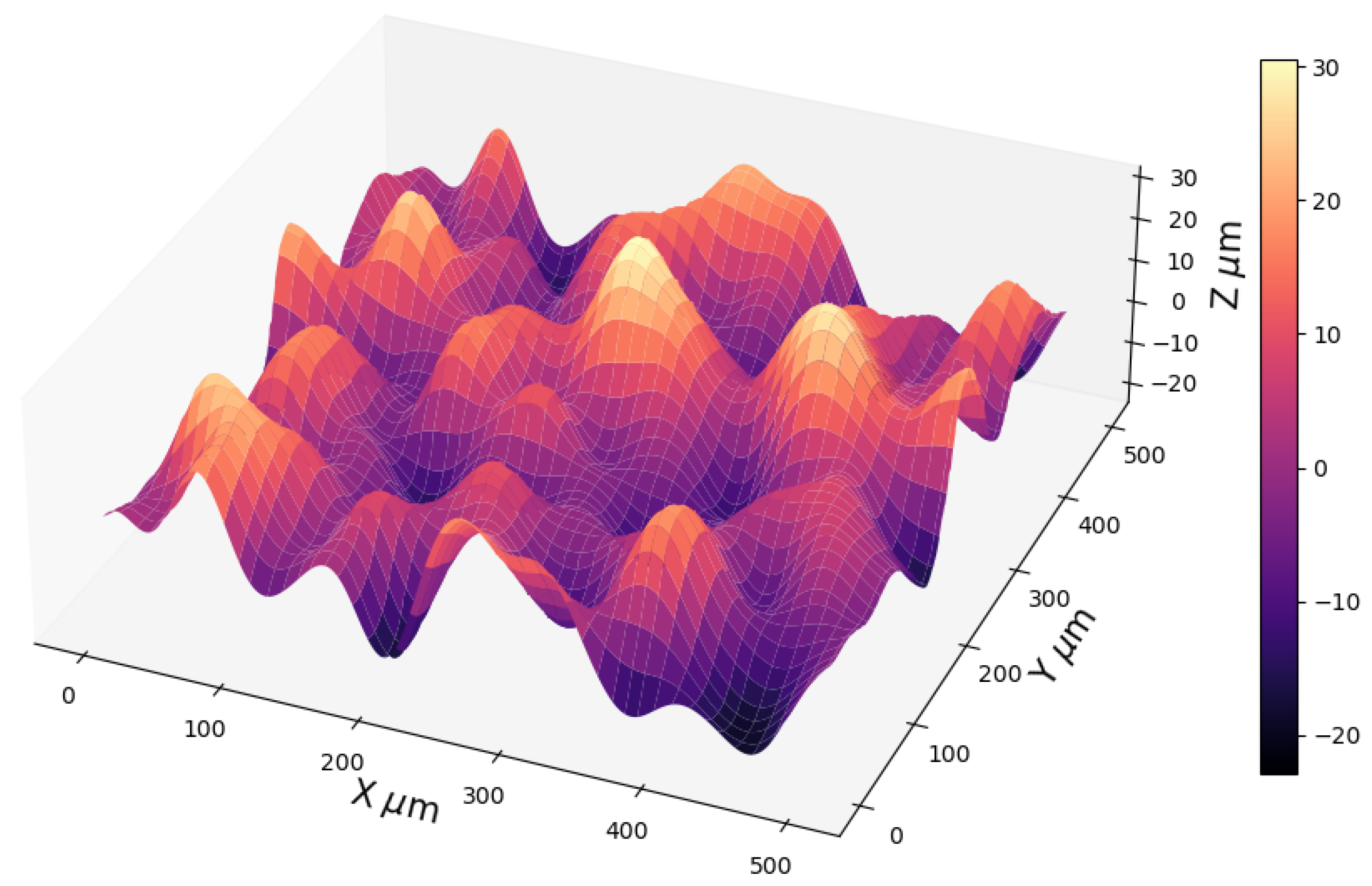
2.1. Three-Dimensional Random Surface Roughness
2.2. Deformation of the Surface by Magnetic Particle Movements
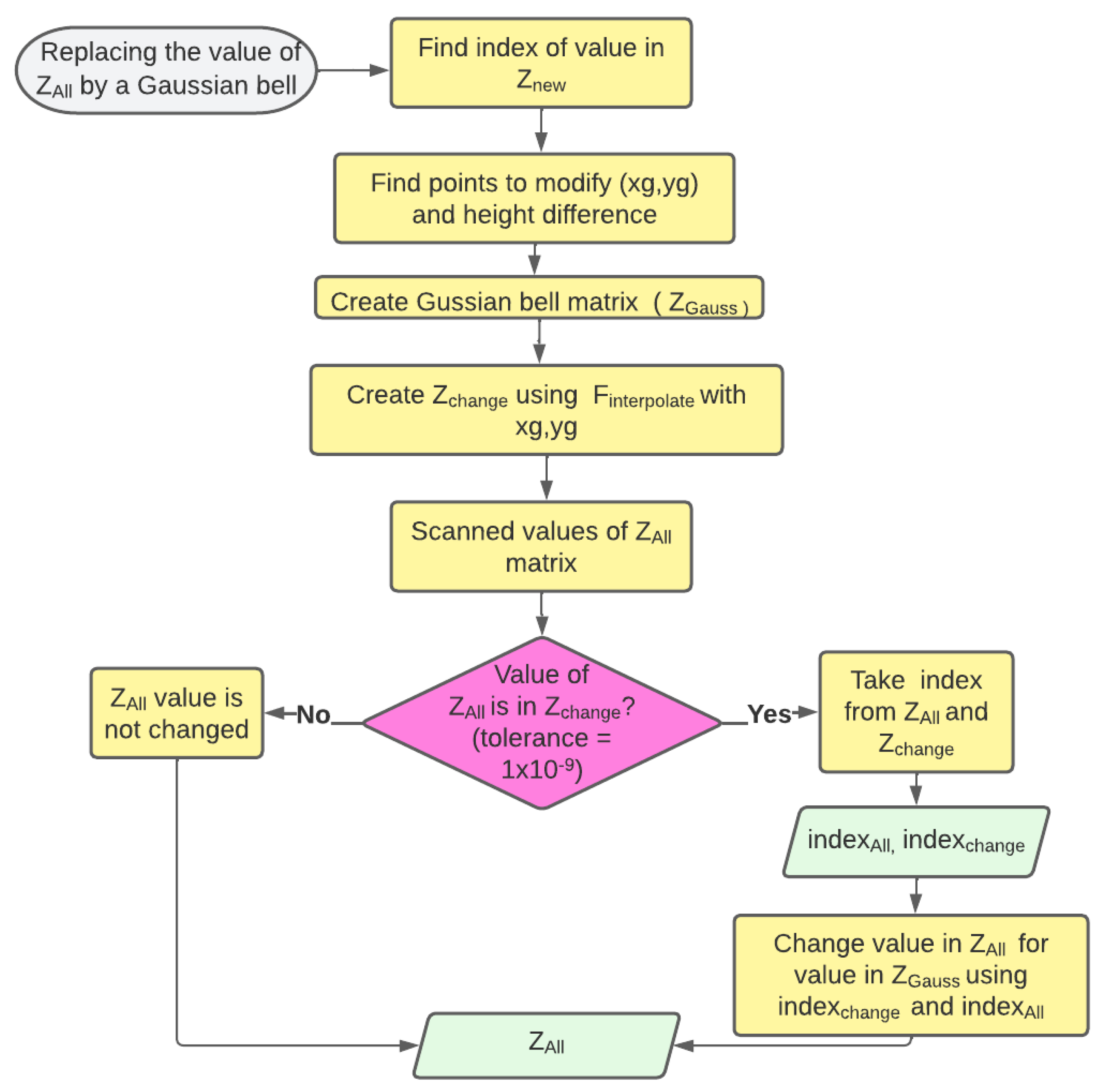
2.3. Methodology for Surface Deformation
- 1.
- Indices formed by pairs of integers (row, column) in the 2D data matrix are identified for easy access of the real value points (,).
- 2.
- The surface points to be affected by the Gaussian bell are determined within a cut-off region (,).
- 3.
- The matrix containing the Gaussian bell () is created using the points from step 2.
- 4.
- A matrix is created using the interpolation function ().
- 5.
- The complete surface matrix () is scanned to be modified.
- 6.
- If the value scanned of matches with any value of with a tolerance of 1 × 10−9, it is modified with the value found in . If the value does not match, it is not modified.
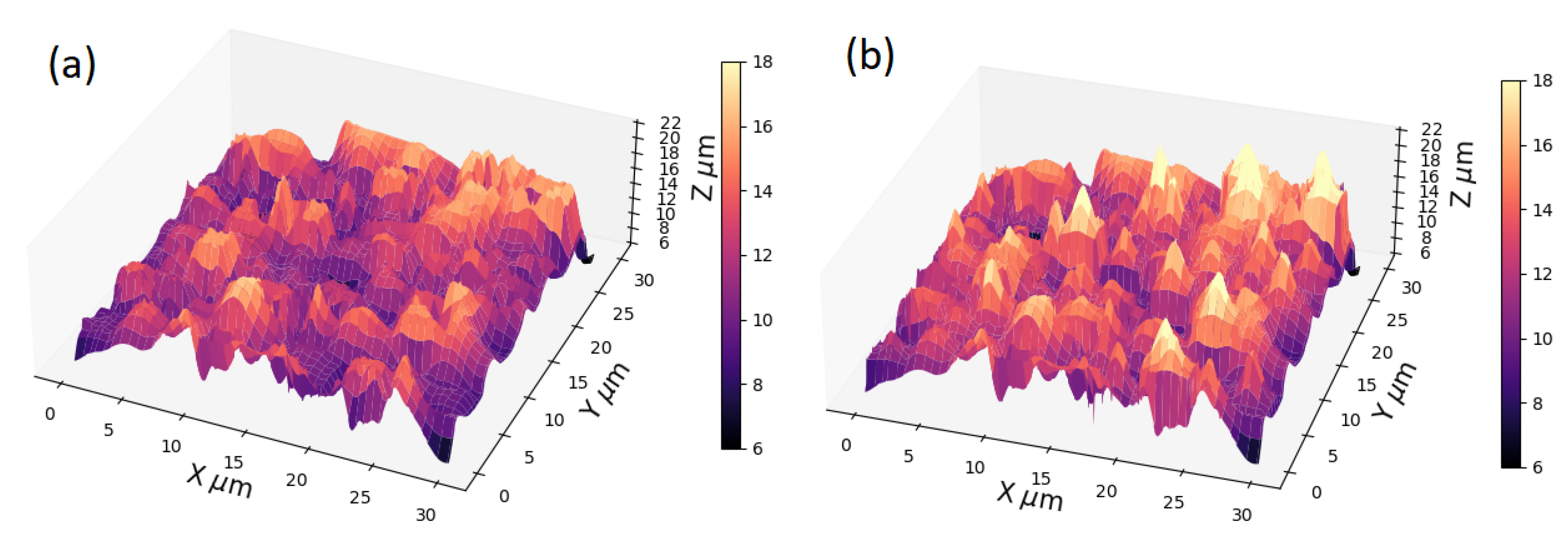
3. Results and Discussion
4. Conclusions
- Our method allows us to obtain a mathematical function that is fed by a grid of points (x, y) in order to reproduce a modified and equilibrated surface, which can be then exported for later use (for instance, to analyze the interaction of a rough surface with a drop of water for obtaining contact angles) by means of an output file.
- Our method considers the internal structure of the elastomer to a certain depth in 3D, in such a way that the presence of particles embedded and their influence, within a range, upon the surface roughness, was tackled.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MRE | Magnetorheological elastomer. |
| hdf | Height distribution function. |
| acf | Autocovariance function. |
| and | correlation length for the x,y direction respectively. |
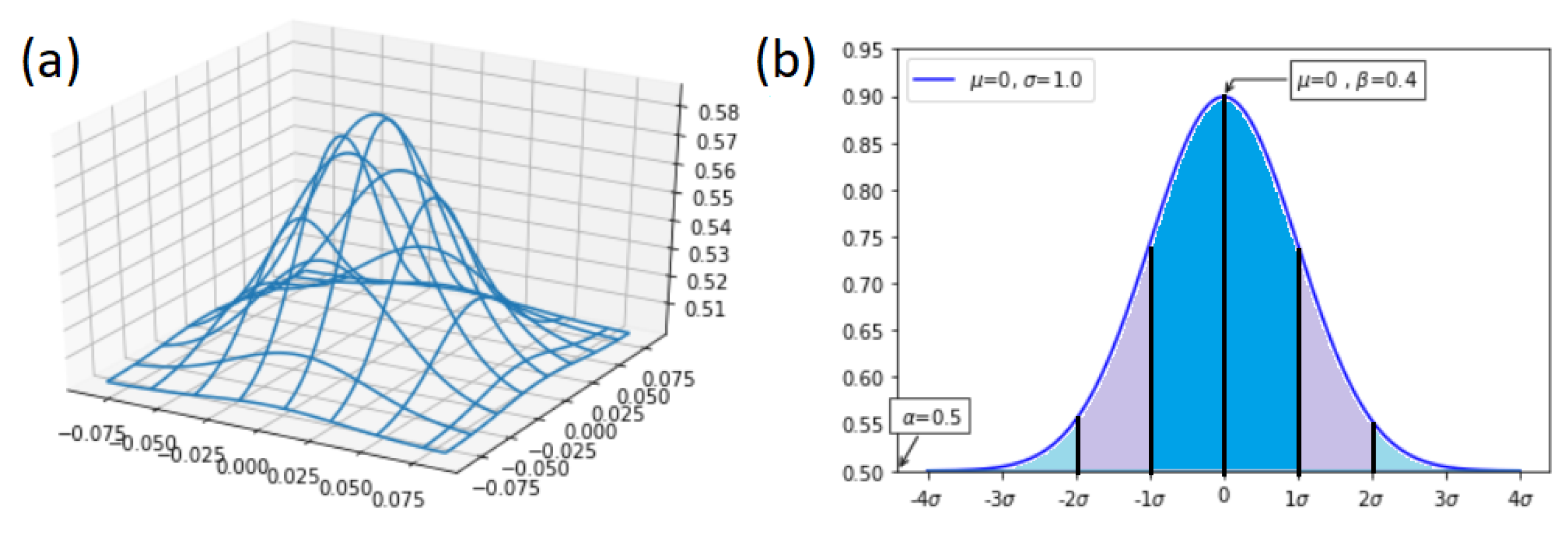
| Height value where the Gaussian bell begins. | |
| Maximum Gaussian bell height. | |
| Standard deviation. | |
| Random initial matrix, using the Garcia and Stoll method. | |
| Mesh points of . | |
| Positions of the magnetic particles. | |
| Surface interpolation function, using to interpolate . | |
| Final positions of the magnetic particles. | |
| Positions resulted of a concatenate initial mesh positions with final | |
| positions of magnetic particles. | |
| Surface matrix generated by using with . | |
| Surface matrix generated by using with . | |
| Z | Difference between the initial and final locations of each particle. |
| ,. | Array of points whose values range from the central position of the |
| particle to the cut-off. | |
| Matrix containing the Gaussian bell with , positions. | |
| Matrix of the points to affected by Gaussian bell using | |
| with ,. | |
| Root mean square roughness (RMS roughness). |
References
- Liu, T.; Xu, Y. Magnetorheological Elastomers: Materials and Applications. Smart Funct. Soft Mater. 2019. [Google Scholar] [CrossRef]
- Glavan, G.; Salamon, P.; Belyaeva, I.A.; Shamonin, M.; Drevenšek-Olenik, I. Tunable surface roughness and wettability of a soft magnetoactive elastomer. J. Appl. Polym. Sci. 2018, 135, 46221. [Google Scholar] [CrossRef]
- Danas, K.; Kankanala, S.V.; Triantafyllidis, N. Experiments and modeling of iron-particle-filled magnetorheological elastomers. J. Mech. Phys. Solids 2012, 60, 120–138. [Google Scholar] [CrossRef]
- Sánchez, P.A.; Minina, E.S.; Kantorovich, S.S.; Kramarenko, E.Y. Surface relief of magnetoactive elastomeric films in a homogeneous magnetic field: Molecular dynamics simulations. Soft Matter 2019, 15, 175–189. [Google Scholar] [CrossRef]
- Gervasio, M.; Lu, K. Monte Carlo Simulation Modeling of Nanoparticle-Polymer Cosuspensions. Langmuir 2019, 35, 161–170. [Google Scholar] [CrossRef] [PubMed]
- Nadzharyan, T.A.; Shamonin, M.; Kramarenko, E.Y. Theoretical Modeling of Magnetoactive Elastomers on Different Scales: A State-of-the-Art Review. Polymers 2022, 14, 4096. [Google Scholar] [CrossRef]
- Li, R.; Li, X.; Li, Y.; Yang, P.A.; Liu, J. Experimental and numerical study on surface roughness of magnetorheological elastomer for controllable friction. Friction 2020, 8, 917–929. [Google Scholar] [CrossRef]
- Li, R.; Li, X.; Yang, P.A.; Liu, J.; Chen, S. The field-dependent surface roughness of magnetorheological elastomer: Numerical simulation and experimental verification. Smart Mater. Struct. 2019, 28, 085018. [Google Scholar] [CrossRef]
- Chen, S.; Li, R.; Li, X.; Wang, X. Magnetic field induced surface micro-deformation of magnetorheological elastomers for roughness control. Front. Mater. 2018, 5, 76. [Google Scholar] [CrossRef]
- Garcia, N.; Stoll, E. Monte Carlo Calculation for Electromagnetic-Wave Scattering from Random Rough Surfaces. Phys. Rev. Lett. 1984, 52, 1798. [Google Scholar] [CrossRef]
- Shiwei, C.; Shuai, D.; Xiaojie, W.; Weihua, L. Magneto-induced surface morphologies in magnetorheological elastomer films: An analytical study. Smart Mater. Struct. 2019, 28, 045016. [Google Scholar] [CrossRef]
- Mack, C.A. Generating random rough edges, surfaces, and volumes. Appl. Opt. 2013, 52, 1472–1480. [Google Scholar] [CrossRef] [PubMed]
- Naylor, T. Computer Simulation Techniques; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1966. [Google Scholar]
- Bergström, D.; Powell, J.; Kaplan, A.F.H. The absorption of light by rough metal surfaces-A three-dimensional ray-tracing analysis. Citation J. Appl. Phys. 2008, 103, 113504. [Google Scholar] [CrossRef]
- Taconet, O.; Ciarletti, V. Estimating soil roughness indices on a ridge-and-furrow surface using stereo photogrammetry. Soil Tillage Res. 2007, 93, 64–76. [Google Scholar] [CrossRef]
- Rostami, A.; Streator, J.L. Study of liquid-mediated adhesion between 3D rough surfaces: A spectral approach. Tribol. Int. 2015, 84, 36–47. [Google Scholar] [CrossRef]
- Tan, H. In vivo surface roughness evolution of a stressed metallic implant. J. Mech. Phys. Solids 2016, 95, 430–440. [Google Scholar] [CrossRef]
- Altmeppen, J.; Sommerfeld, H.; Koch, C.; Staudacher, S. An analytical approach to estimate the effect of surface roughness on particle rebound. J. Glob. Power Propuls. Soc. 2020, 4, 27–37. [Google Scholar] [CrossRef]
- Damiati, L.; Eales, M.G.; Nobbs, A.H.; Su, B.; Tsimbouri, P.M.; Salmeron-Sanchez, M.; Dalby, M.J. Impact of surface topography and coating on osteogenesis and bacterial attachment on titanium implants. J. Tissue Eng. 2018, 9, 2041731418790694. [Google Scholar] [CrossRef] [PubMed]
- Trevisani, S.; Cavalli, M. Topography-based flow-directional roughness: Potential and challenges. Earth Surf. Dyn. 2016, 4, 343–358. [Google Scholar] [CrossRef]
- Johari, M.A.F.; Mazlan, S.A.; Nasef, M.M.; Ubaidillah, U.; Nordin, N.A.; Aziz, S.A.A.; Johari, N.; Nazmi, N. Microstructural behavior of magnetorheological elastomer undergoing durability evaluation by stress relaxation. Sci. Rep. 2021, 11, 10936. [Google Scholar] [CrossRef] [PubMed]
- Iacobescu, G.E.; Balasoiu, M.; Bica, I. Investigation of surface properties of magnetorheological elastomers by atomic force microscopy. J. Supercond. Nov. Magn. 2013, 26, 785–792. [Google Scholar] [CrossRef]
- Python scipy.interpolate.interp2d—SciPy v1.8.0 Manual. Available online: https://docs.scipy.org/doc/scipy/reference/generated/scipy.interpolate.interp2d.html (accessed on 7 November 2022).
- Oliveira, R.D.; Albuquerque, D.; Cruz, T.; Yamaji, F.; Leite, F.; Oliveira, R.D.; Albuquerque, D.; Cruz, T.; Yamaji, F.; Leite, F. Measurement of the Nanoscale Roughness by Atomic Force Microscopy: Basic Principles and Applications. In Atomic Force Microscopy—Imaging, Measuring and Manipulating Surfaces at the Atomic Scale; IntechOpen: London, UK, 2012. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | RMS Input | RMS SC | RMS MS | % Deformation | ||
|---|---|---|---|---|---|---|
| 1 | 2 m | 2 m | 2 m | 2.1 m | 2.4 m | |
| 2 | 2 m | 0.4 m | 0.4 m | 1.7 m | 2.2 m | |
| 3 | 1 m | 2.2 m | 2.2 m | 1.1 m | 1.6 m | |
| 4 | 1.5 m | 0.3 m | 0.3 m | 1.2 m | 1.9 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valencia, J.A.; Restrepo, J.; Salinas, H.D.; Restrepo, E. Numerical Study on Surface Reconstruction and Roughness of Magnetorheological Elastomers. Computation 2023, 11, 46. https://doi.org/10.3390/computation11030046
Valencia JA, Restrepo J, Salinas HD, Restrepo E. Numerical Study on Surface Reconstruction and Roughness of Magnetorheological Elastomers. Computation. 2023; 11(3):46. https://doi.org/10.3390/computation11030046
Chicago/Turabian StyleValencia, José Antonio, Johans Restrepo, Hernán David Salinas, and Elisabeth Restrepo. 2023. "Numerical Study on Surface Reconstruction and Roughness of Magnetorheological Elastomers" Computation 11, no. 3: 46. https://doi.org/10.3390/computation11030046
APA StyleValencia, J. A., Restrepo, J., Salinas, H. D., & Restrepo, E. (2023). Numerical Study on Surface Reconstruction and Roughness of Magnetorheological Elastomers. Computation, 11(3), 46. https://doi.org/10.3390/computation11030046