Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles


Abstract
1. Introduction
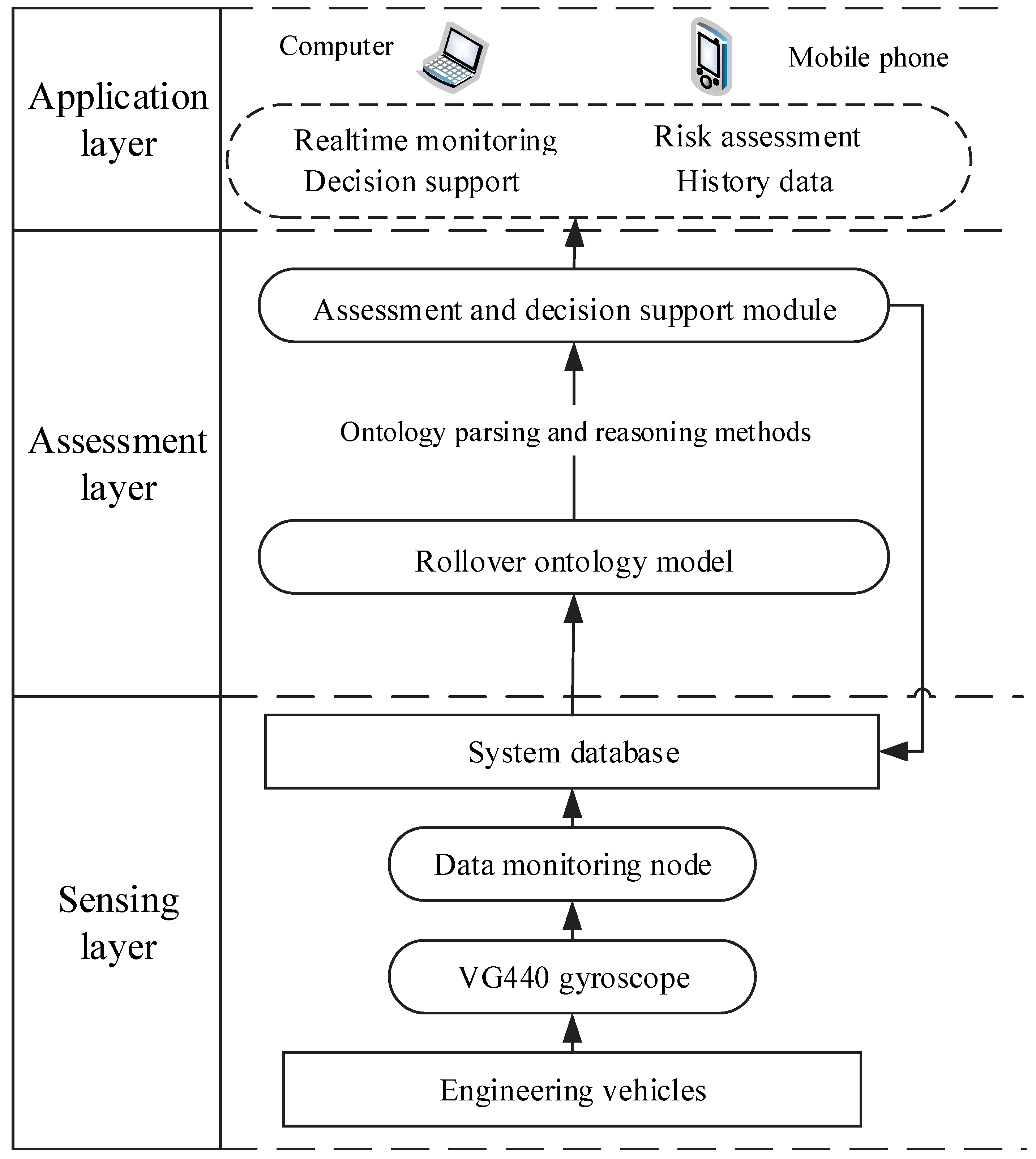
2. The Framework of the Rollover Monitoring and Decision Support System
3. Ontology-Based Rollover Assessment and Decision Support Method
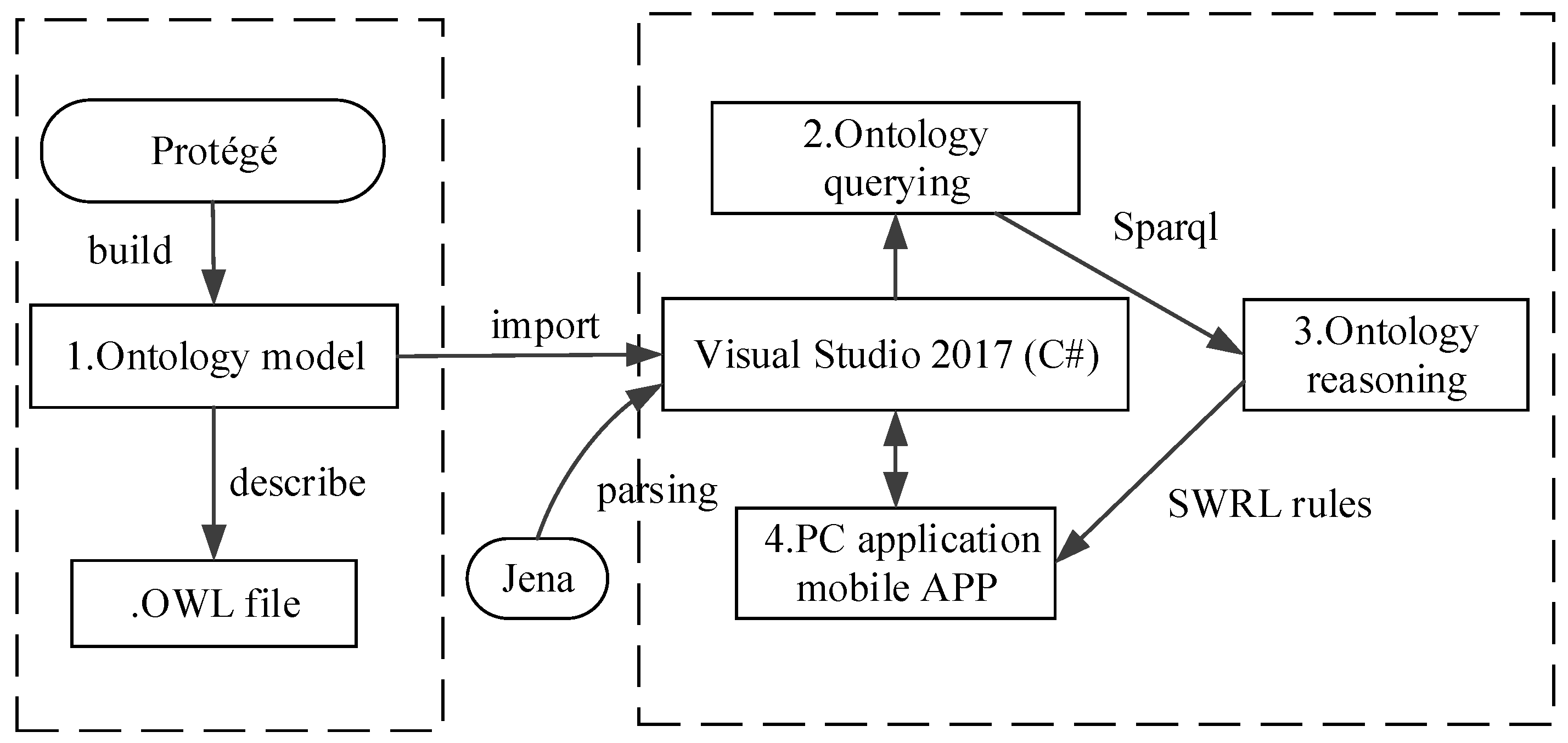
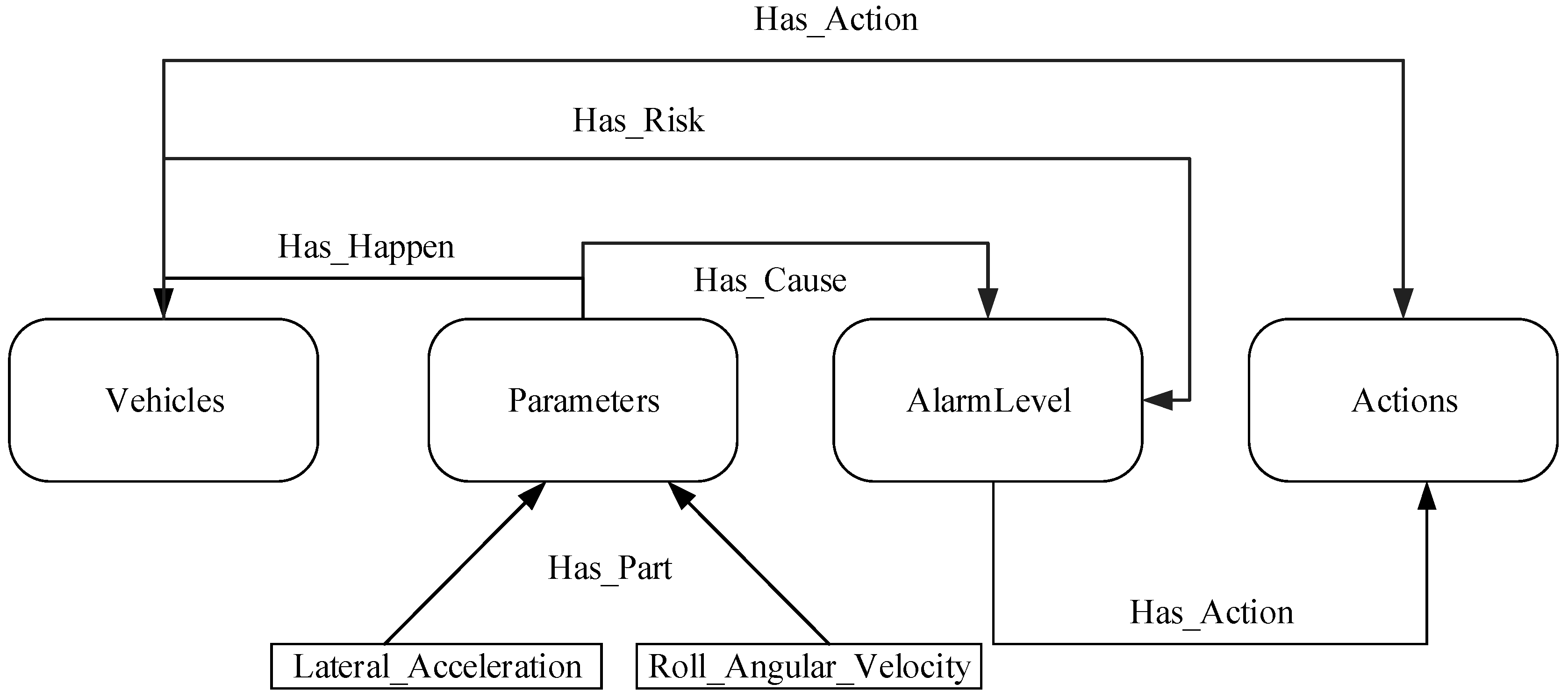
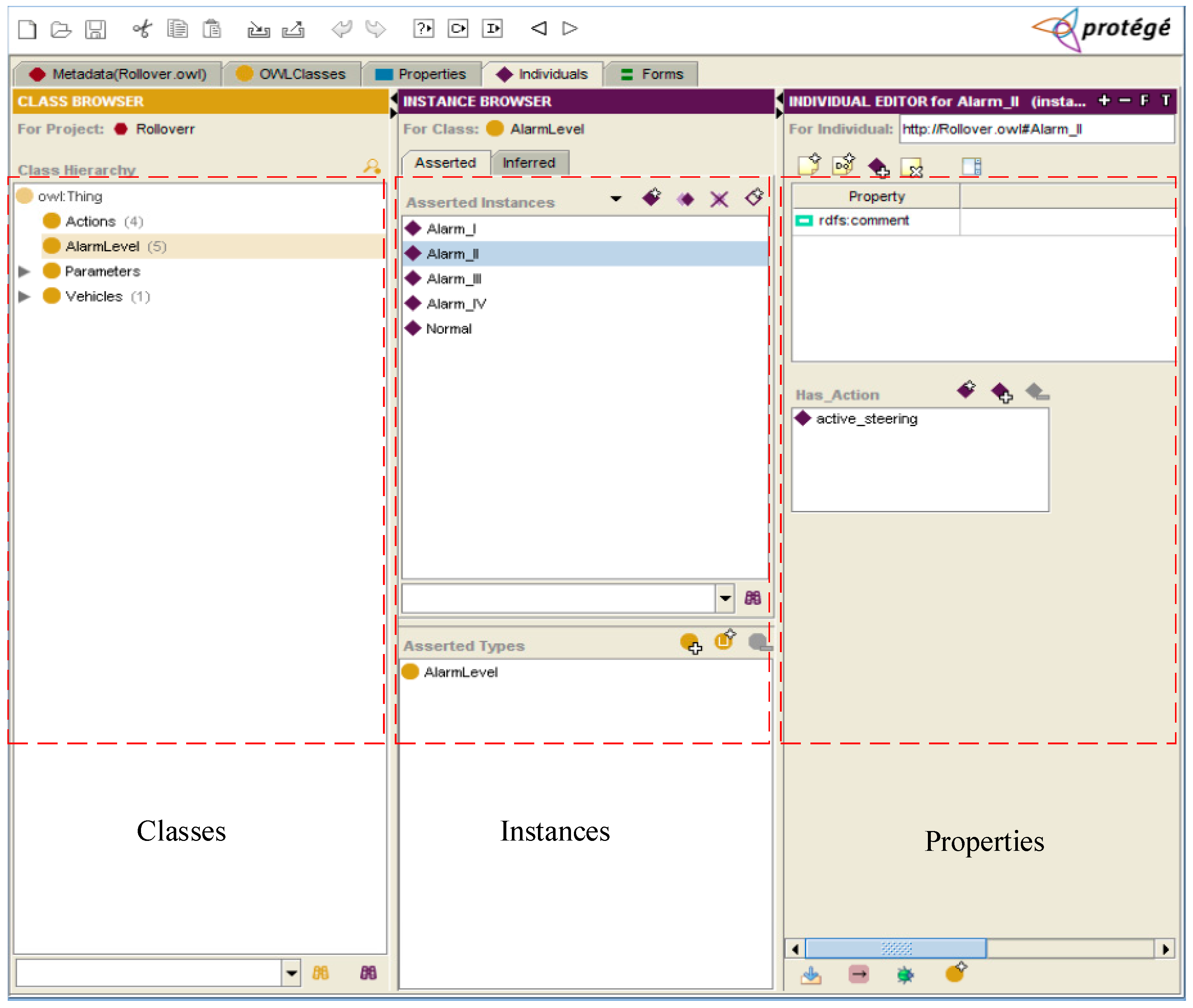
3.1. Ontology-Based Knowledge Modeling Process
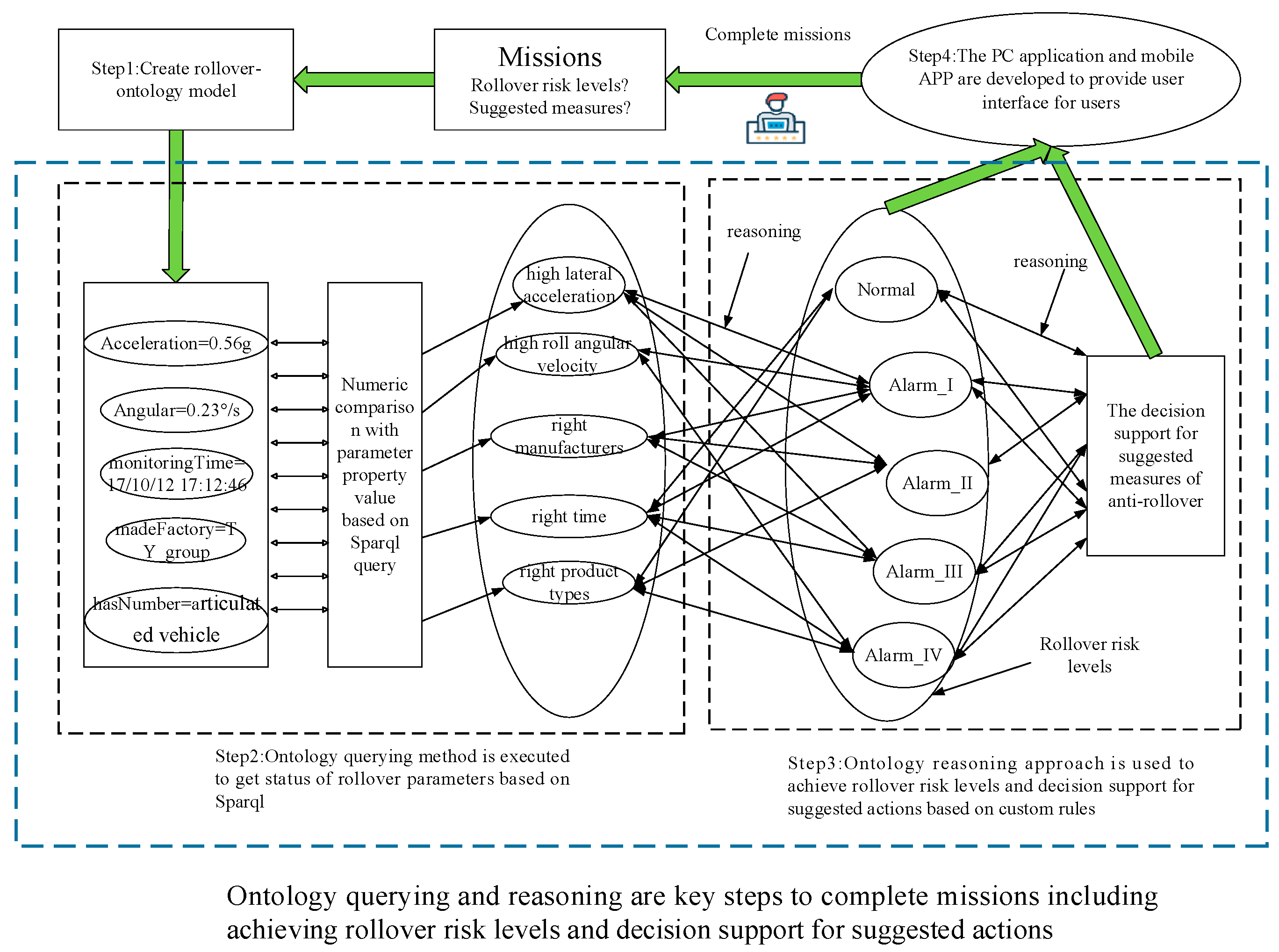
3.2. Ontology Querying and Reasoning Methods
3.2.1. Ontology Querying Based on SPARQL
3.2.2. Assessment and Decision Support of Rollover Risk on the Basis of Ontology Reasoning
- (1)
- C (? x): If x is an instance of the class C or is the value of its data property, then C (? x) is valid.
- (2)
- P (? x, y): If x and y are associated with the property P, then P (? x, y) is valid.
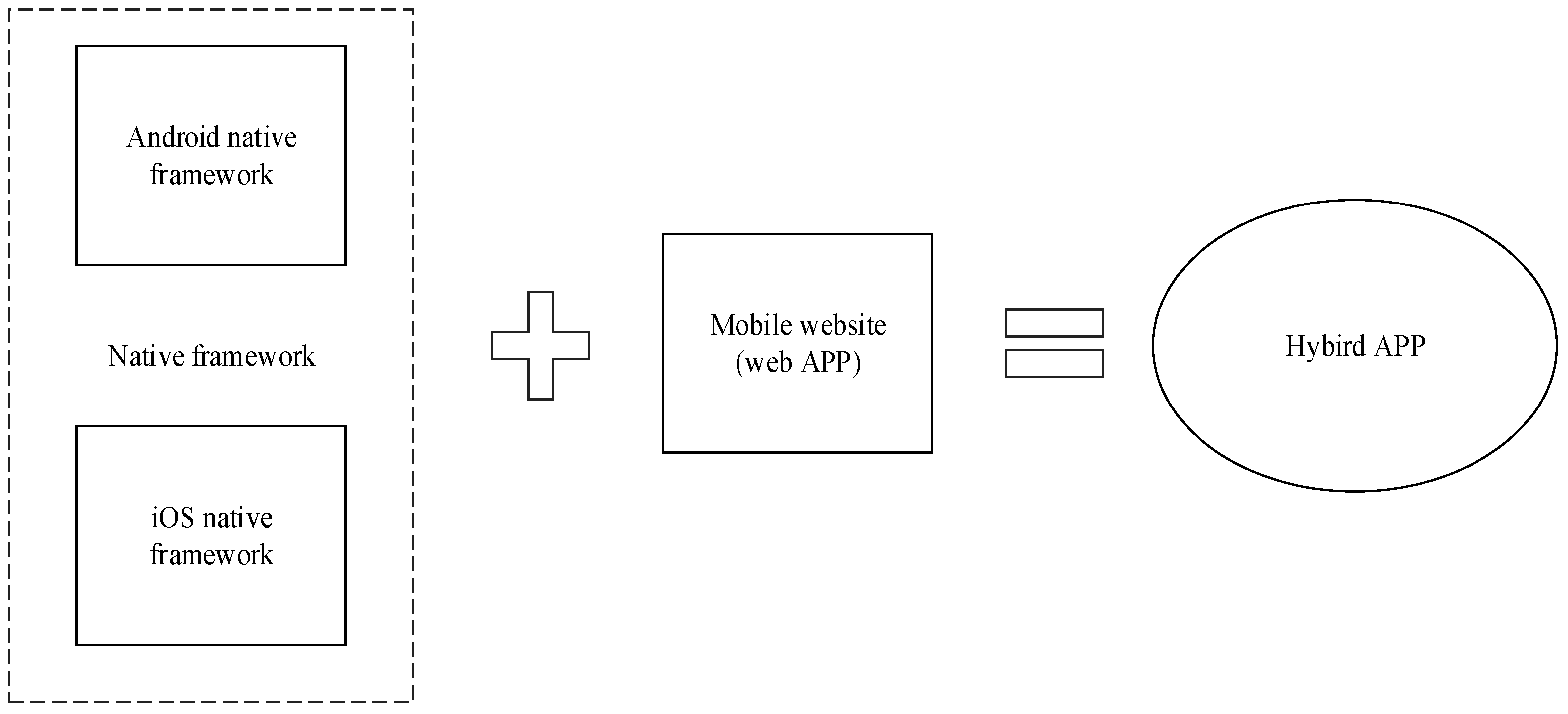
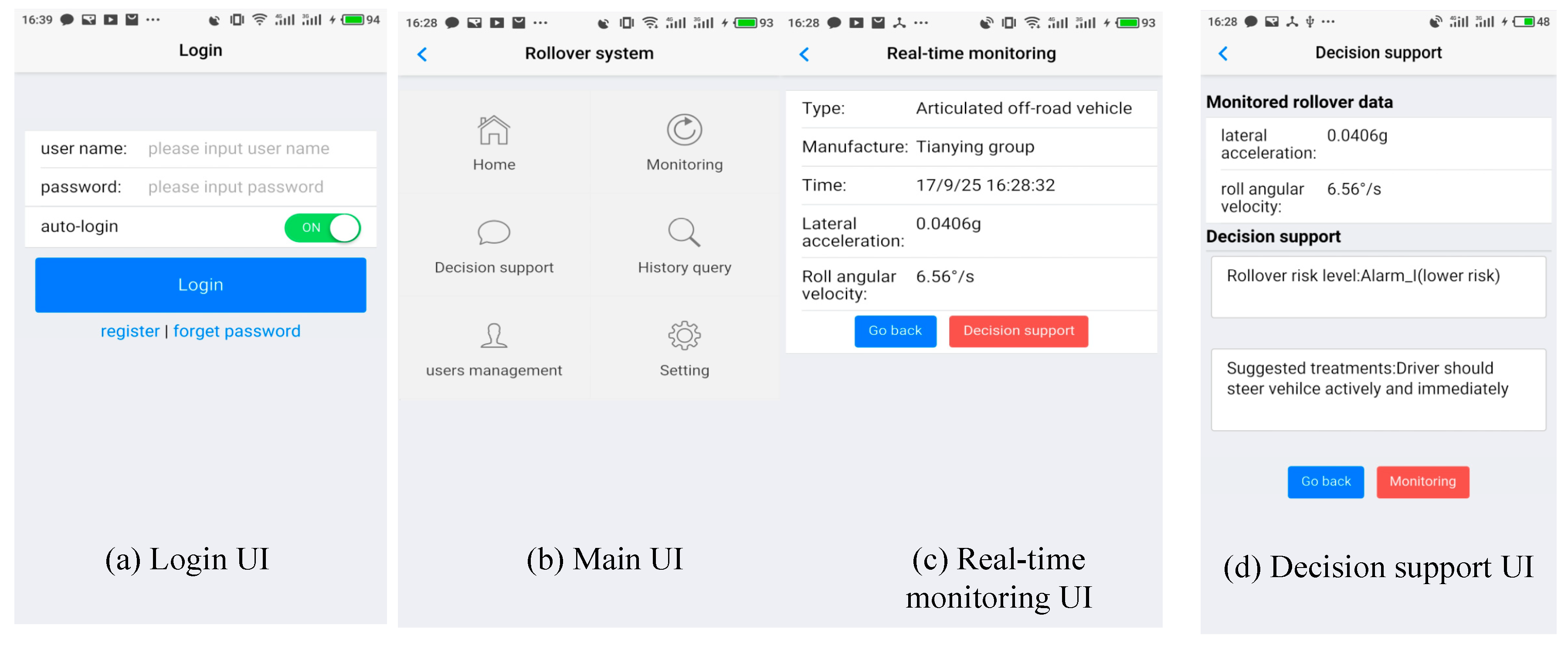
4. The Design of the PC and Mobile APPs
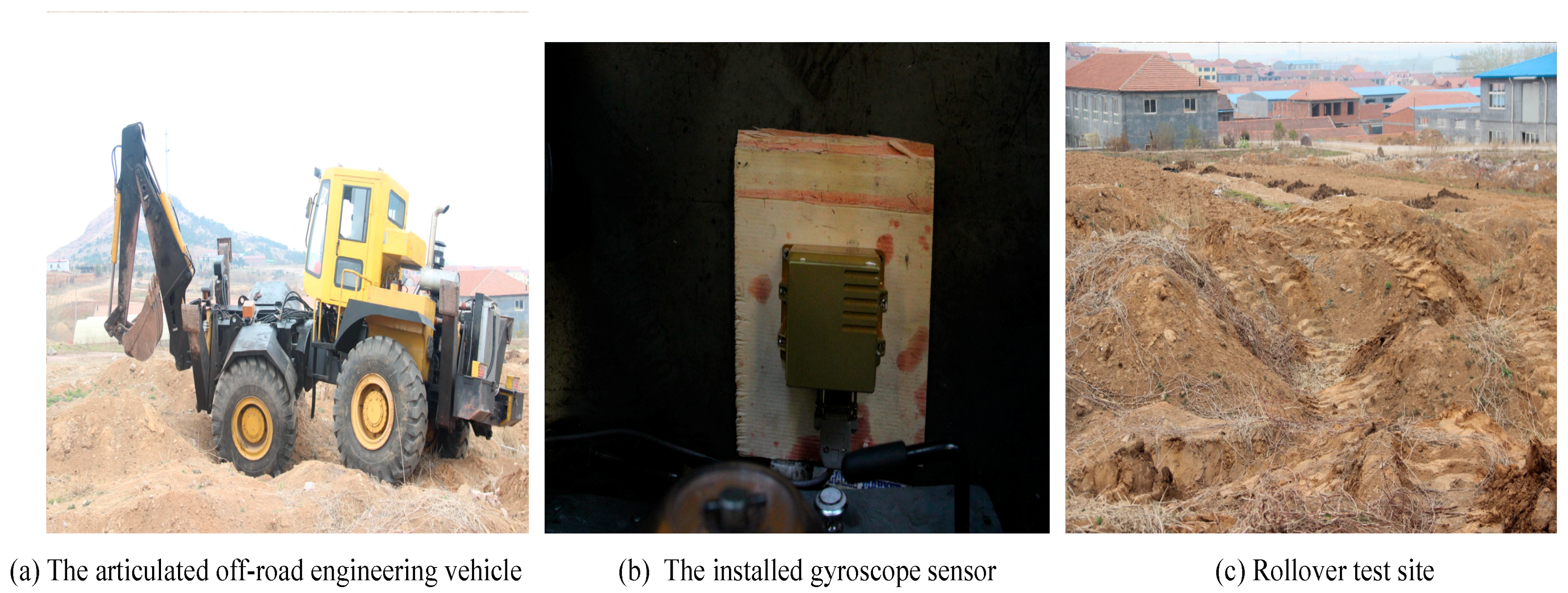
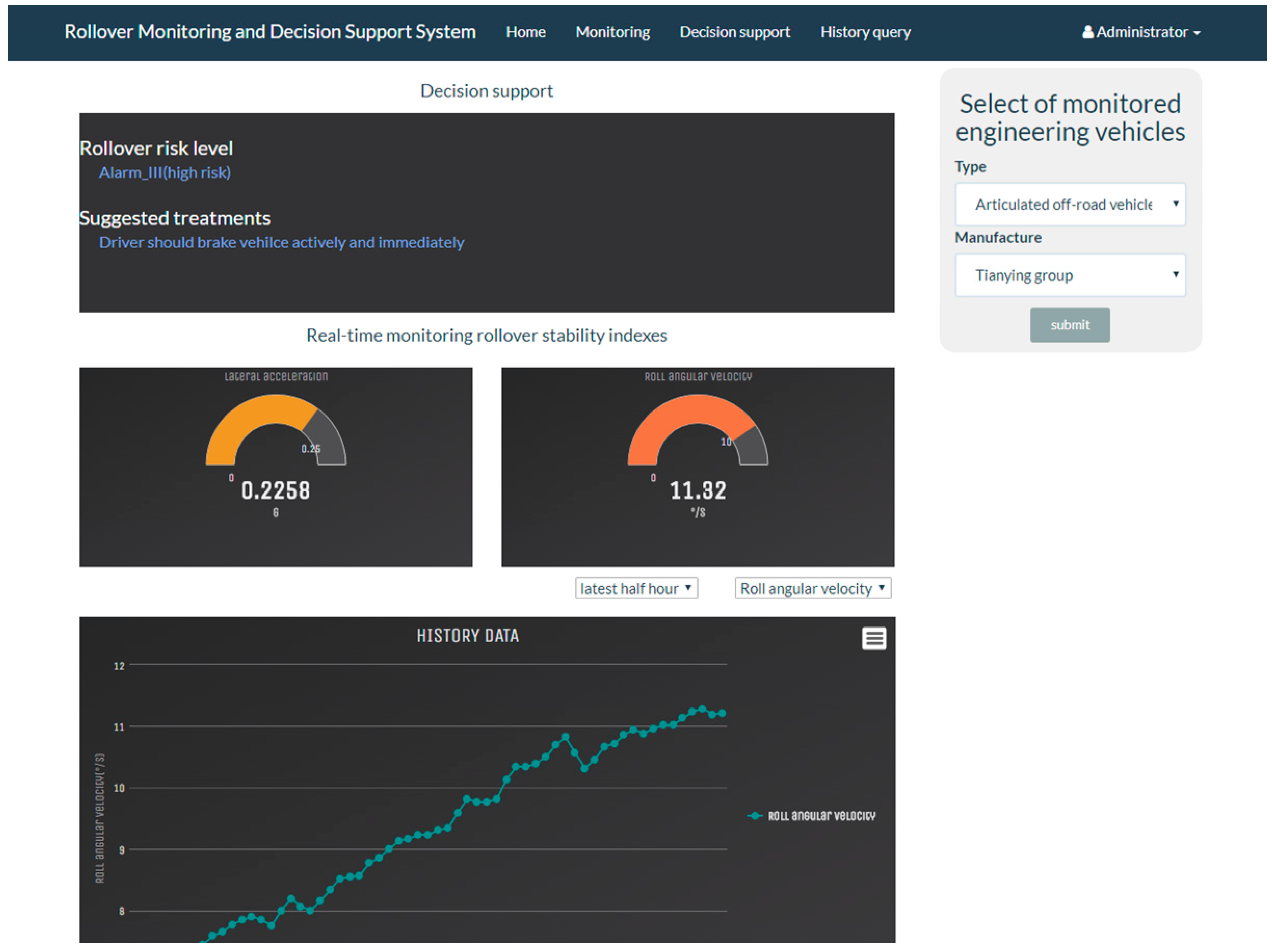
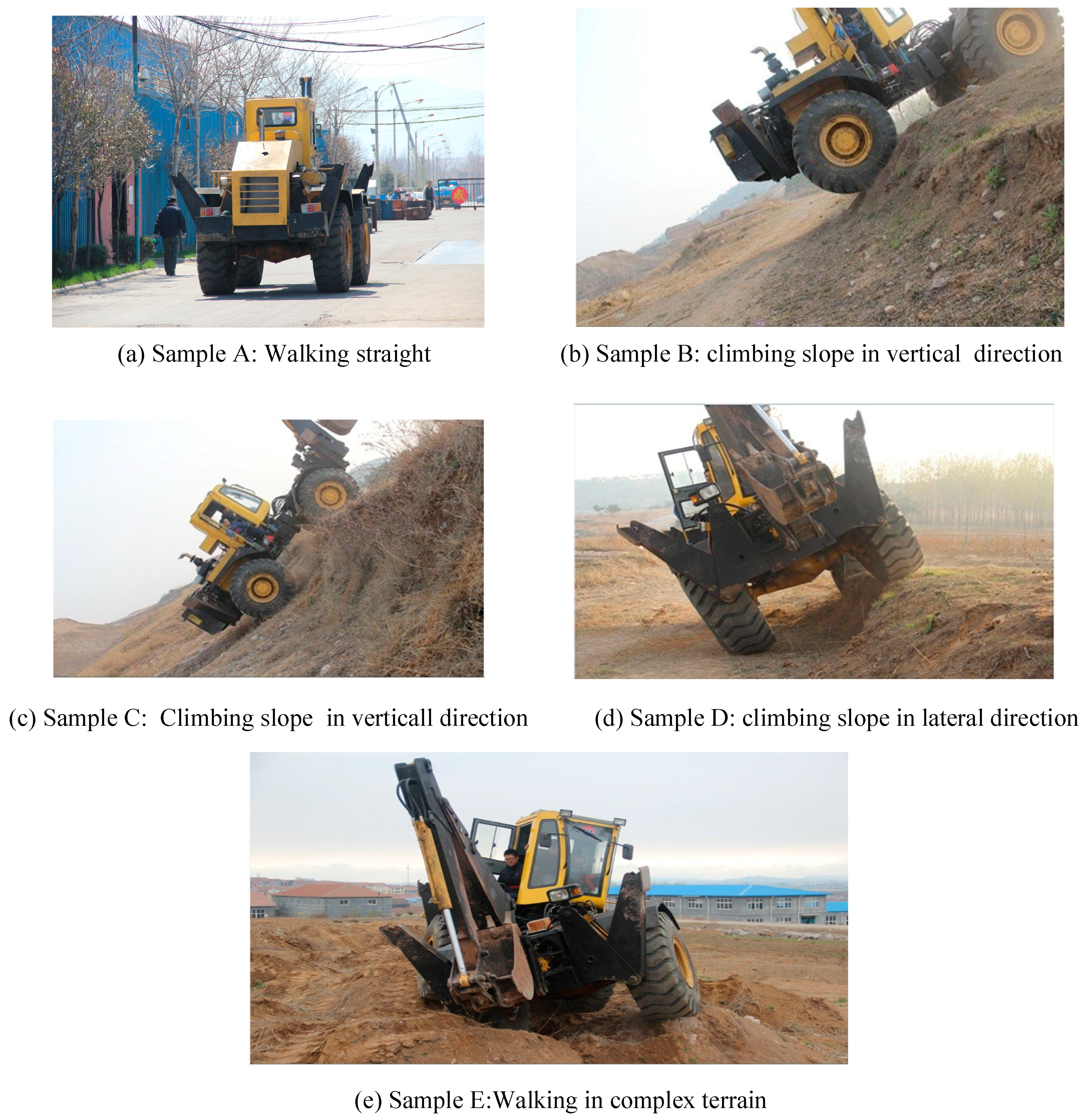
5. Validation of Rollover Monitoring and Decision Support System
6. Conclusions
- High flexibility and expandability. The ontology model in our proposed system can express various rollover stability indexes of all engineering vehicles with different granularity. Moreover, the classes, properties, individuals in the ontology model, and reasoning rules can be continually updated and enhanced. Hence, the ontology-based method presented in this paper is highly expansible, can be used to develop a rollover monitoring and decision support system for all kinds of engineering machinery, and even has the potential to be applied in water quality monitoring and fire monitoring.
- Knowledge integration and sharing. In our paper, ontology not only enables the computer to easily understand and integrate knowledge, but it also eliminates the ambiguity and heterogeneity of concept expression. Further, all represented knowledge can be interweaved together in the ontology model, which achieves the sharing and reusing of rollover knowledge. Such shared and reused rollover knowledge not only saves research resources, but it is also helpful to provide a knowledge basis for developers.
- Manages conveniently. In our work, the PC and mobile APPs have been developed to provide a unified platform for users including drivers, the administrator, and the public safety department. Users can monitor the rollover situation and obtain decision support effectively only via the Internet. Consequently, the model is not only good for enhancing the rollover management’s efficiency, but it contributives to rollover information shared by corporations and the government.
- (1)
- Rollover reasoning rules and monitored parameters need to be further added to obtain more detailed and useful decision results, such as specific steering angle, steering direction, braking time, and so forth.
- (2)
- The network condition may be poor because of relatively remote working sites of the engineering vehicle. In this context, the data monitoring node cannot transfer rollover data to the system database, and the PC and mobile APPs will be unable to work properly. In the future, an ontology-based reasoning APP that is equipped with liquid crystal display (LCD) will be inserted into the data monitoring node to inform drivers of the decision results when the network has no signal.
- (3)
- Drivers may not be able to execute suggestions of the ontology-based decision results accurately and rapidly; thus, the anti-rollover controller will be developed in the next step. In this way, the decision results in this paper can feedback the controller, and then the controller can actively control engineering vehicles to avoid rollover.
- (4)
- The main purpose of this paper is to apply ontology technology to solve the problems of rollover monitoring and decision making, but it neglects the application of relevant algorithms to obtain a more reasonable and accurate risk level. This paper only judges the rollover risk level on the basis of data states of parameters, and the related algorithm will be used to calculate the rollover risk level in the future.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Hyun, D.; Langari, R. Modeling to Predict Rollover Threat of Tractor-Semitrailers. Veh. Syst. Dyn. 2003, 39, 401–414. [Google Scholar] [CrossRef]
- Li, X.; Wang, G.; Yao, Z.; Yang, Y. Research on Lateral Stability and Rollover Mechanism of Articulated Wheel Loader. Math. Comput. Model. Dyn. Syst. 2014, 20, 248–263. [Google Scholar] [CrossRef]
- Li, X.; Wu, Y.; Zhou, W.; Yao, Z. Study on Roll Instability Mechanism and Stability Index of Articulated Steering Vehicles. Math. Probl. Eng. 2016, 2016, 1–15. [Google Scholar] [CrossRef]
- Liu, J.; Ayers, P.D. Off-road Vehicle Rollover and Field Testing of Stability Index. J. Agric. Saf. Health 1999, 5, 59–71. [Google Scholar] [CrossRef]
- Acharya, D.; Kumar, V.; Gaddis, G.M. A Mobile System for Detecting and Notifying Vehicle Rollover Events. In Proceedings of the 15th International Conference on Advanced Computing and Communications, Assam, India, 18–21 December 2007; pp. 268–273. [Google Scholar]
- Li, H.; Zhao, Y.; Wang, H.; Lin, F. Design of an Improved Predictive LTR for Rollover Warning Systems. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 3779–3791. [Google Scholar] [CrossRef]
- Carpenter, E.G. System and Method for Providing Emergency Warnings for a Rollover Vehicle. U.S. Patent US20080291003A1, 2011. [Google Scholar]
- Zhu, T.; Zong, C.; Wu, B.; Sun, Z. Rollover Warning System of Heavy Duty Vehicle Based on Improved TTR Algorithm. J. Mech. Eng. 2011, 47, 88–94. [Google Scholar] [CrossRef]
- Elhdad, R.; Chilamkurti, N.; Torabi, T. An Ontology-based Framework for Process Monitoring and Maintenance in Petroleum Plant. J. Loss Prev. Process Ind. 2013, 26, 104–116. [Google Scholar] [CrossRef]
- Verstichel, S.; Ongenae, F.; Loeve, L.; Vermeulen, F.; Dings, P.; Dhoedt, B.; Dhaene, T.; Turck, F.D. Efficient Data Integration in the Railway Domain through an Ontology-based Methodology. Transp. Res. Part C 2011, 19, 617–643. [Google Scholar] [CrossRef]
- Chira, O.; Chira, C.; Roche, T.; Tormey, D.; Brennan, A. An Agent-based Approach to Knowledge Management in Distributed Design. J. Intell. Manuf. 2006, 17, 737–750. [Google Scholar] [CrossRef]
- Panetto, H.; Dassisti, M.; Tursi, A. ONTO-PDM: Product-driven Ontology for Product Data Management Interoperability within Manufacturing Process Environment. Adv. Eng. Inform. 2012, 26, 334–348. [Google Scholar] [CrossRef]
- Wang, Y.; Yi, J.; Zhu, X.; Luo, J.; Ji, B. Developing an Ontology-Based Cold Chain Logistics Monitoring and Decision System. J. Sens. 2015, 2015, 1–8. [Google Scholar] [CrossRef]
- Huang, X.; Yi, J.; Chen, S.; Zhu, X. A Wireless Sensor Network-based Approach with Decision Support for Monitoring Lake Water Quality. Sensors 2015, 15, 29273–29296. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Yi, J.; Huang, X.; Chen, S. An Ontology-based Knowledge Modelling Approach for River Water Quality Monitoring and Assessment. In Proceedings of the 20th International Conference on Knowledge Based and Intelligent Information and Engineering Systems, York, UK, 5–7 September 2016; pp. 335–344. [Google Scholar]
- Niaraki, A.S.; Kim, K. Ontology based Personalized Route Planning System Using a Multi-criteria Decision Making Approach. Expert Syst. Appl. 2009, 36, 2250–2259. [Google Scholar] [CrossRef]
- Haghighi, P.D.; Burstein, F.; Zaslavsky, A.; Arbon, P. Development and Evaluation of Ontology for Intelligent Decision Support in Medical Emergency Management for Mass Gatherings. Decis. Support Syst. 2013, 54, 1192–1204. [Google Scholar] [CrossRef]
- Garrido, J.; Requena, I. Proposal of Ontology for Environmental Impact Assessment: An Application with Knowledge Mobilization. Expert Syst. Appl. 2011, 38, 2462–2472. [Google Scholar] [CrossRef]
- Chen, S.; Yi, J.; Jiang, H.; Zhu, X. Ontology and CBR Based Automated Decision-making Method for the Disassembly of Electromechanical Products. Adv. Eng. Inform. 2016, 30, 564–584. [Google Scholar] [CrossRef]
- Mohammad, M.A.; Kaloskampis, I.; Hicks, Y.; Setchi, R. Ontology-based Framework for Risk Assessment in Road Scenes Using Videos. In Proceedings of the 19th International Conference on Knowledge Based and Intelligent Information and Engineering Systems, Singapore, 7–9 September 2015; pp. 1532–1541. [Google Scholar]
- Scheuer, S.; Haase, D.; Meyer, V. Towards a Flood Risk Assessment Ontology—Knowledge Integration into a Multi-criteria Risk Assessment Approach. Comput. Environ. Urban Syst. 2013, 37, 82–94. [Google Scholar] [CrossRef]
- Corry, E.; Pauwels, P.; Hu, S.; Keane, M.; O’Donnell, J. A Performance Assessment Ontology for the Environmental and Energy Management of Buildings. Autom. Constr. 2015, 57, 249–259. [Google Scholar] [CrossRef]
- Ion, S.; Bogdan, I. Source Code Plagiarism Detection Method Using Protégé Built Ontologies. Inform. Econ. J. 2013, 17, 75–86. [Google Scholar]
- Alderfer, C.P. Clarfying the Meaning of Mentor—Protégé Relationships. Consult. Psychol. J. Pract. Res. 2014, 66, 6–19. [Google Scholar] [CrossRef]
- Yang, D.; Miao, R.; Wu, H.; Zhou, Y. Product Configuration Knowledge Modeling Using Ontology Web Language. Expert Syst. Appl. 2009, 36, 4399–4411. [Google Scholar] [CrossRef]
- Yang, D.; Dong, M.; Miao, R. Development of a Product Configuration System with an Ontology-based Approach. Comput.-Aided Des. 2008, 40, 863–878. [Google Scholar] [CrossRef]
- Shekarpour, S.; Auer, S.; Ngomo, A.-C.N.; Gerber, D.; Hellmann, S.; Stadler, C. Generating SPARQL Queries Using Templates. Web Intell. Agent Syst. 2013, 11, 283–295. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Data Property | Domains | Ranges | Description |
|---|---|---|---|---|
| 1 | hasMaxValue | Parameters | float | Indicate maximum value of parameters in the normal range |
| 2 | hasMinValue | Parameters | float | Indicate minimum value of parameters in the normal range |
| 3 | monitoringTime | Parameters | datetime | Record monitoring time of parameters |
| 4 | madeFactory | Vehicles | string | Indicate manufacturers of engineering vehicles |
| 5 | hasNumber | Vehicles | string | Record product types of monitored engineering vehicles |
| No. | Rule |
|---|---|
| rule1 | Vehicles (? x) ^ Parameters (? y) ^ Has_Happen (? y, ? x) ^ Has_Cause (? y, ? z)—>Has_Risk (? x, ? z) |
| rule2 | Vehicles (? x) ^ Parameters (? y) ^ Has_Happen (? y, ? x) ^ Has_Cause (? y, ? z) ^ Has_Action (? z, ? m)—>Has_Action (? x, ? m) |
| Parameter | Sample A | Sample B | Sample C | Sample D | Sample E |
|---|---|---|---|---|---|
| Lateral acceleration (g) | 0.0006 | 0.0406 | 0.2094 | 0.2258 | 0.2948 |
| Roll angular velocity (°/s) | 0.02 | 6.56 | 8.44 | 11.32 | 12.98 |
| Monitoring time | 17/9/23 14:46:39 | 17/9/25 16:28:32 | 17/9/26 09:05:27 | 17/9/28 11:10:55 | 17/9/27 17:20:43 |
| Type | Articulated off-road vehicle | Articulated off-road vehicle | Articulated off-road vehicle | Articulated off-road vehicle | Articulated off-road vehicle |
| Manufacturer | Tianying group | Tianying group | Tianying group | Tianying group | Tianying group |
| Rollover risk level | Normal | Alarm_I | Alarm_II | Alarm_III | Alarm_IV |
| Suggested treatments | Normal driving | Active steering | Active steering | Active braking | Stop driving |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Liu, X.; Zhou, C. Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles. Information 2018, 9, 112. https://doi.org/10.3390/info9050112
Xu F, Liu X, Zhou C. Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles. Information. 2018; 9(5):112. https://doi.org/10.3390/info9050112
Chicago/Turabian StyleXu, Feixiang, Xinhui Liu, and Chen Zhou. 2018. "Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles" Information 9, no. 5: 112. https://doi.org/10.3390/info9050112
APA StyleXu, F., Liu, X., & Zhou, C. (2018). Developing an Ontology-Based Rollover Monitoring and Decision Support System for Engineering Vehicles. Information, 9(5), 112. https://doi.org/10.3390/info9050112