Detecting Anomalous Trajectories Using the Dempster-Shafer Evidence Theory Considering Trajectory Features from Taxi GNSS Data



Abstract
1. Introduction
1.1. Purpose and Significance
1.2. Anomalous Trajectory Definition
2. Related Works
3. Anomalous Trajectory Detection Method
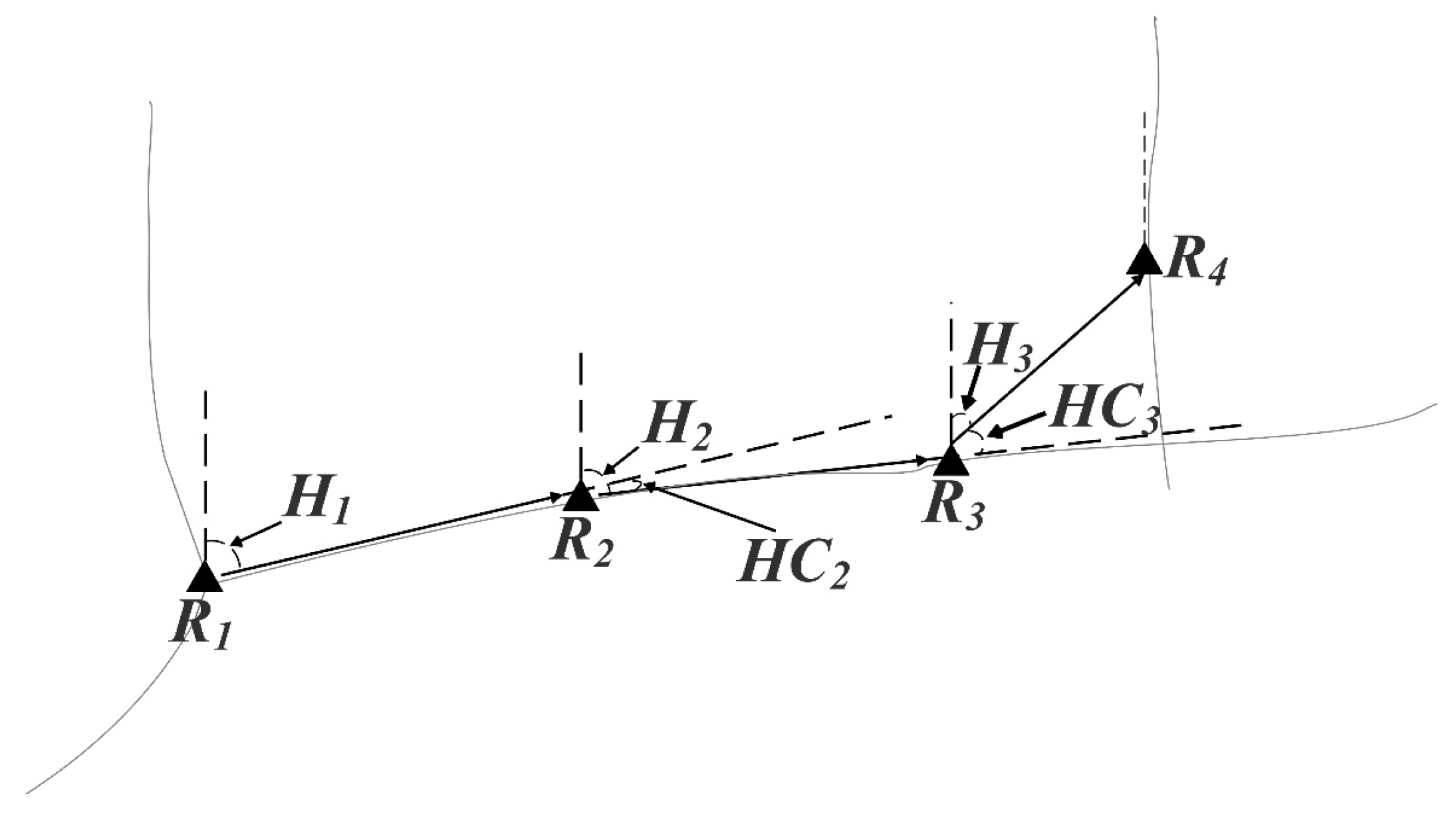
3.1. Trajectory Features Definition
3.2. Dempster-Shafer Evidence Theory
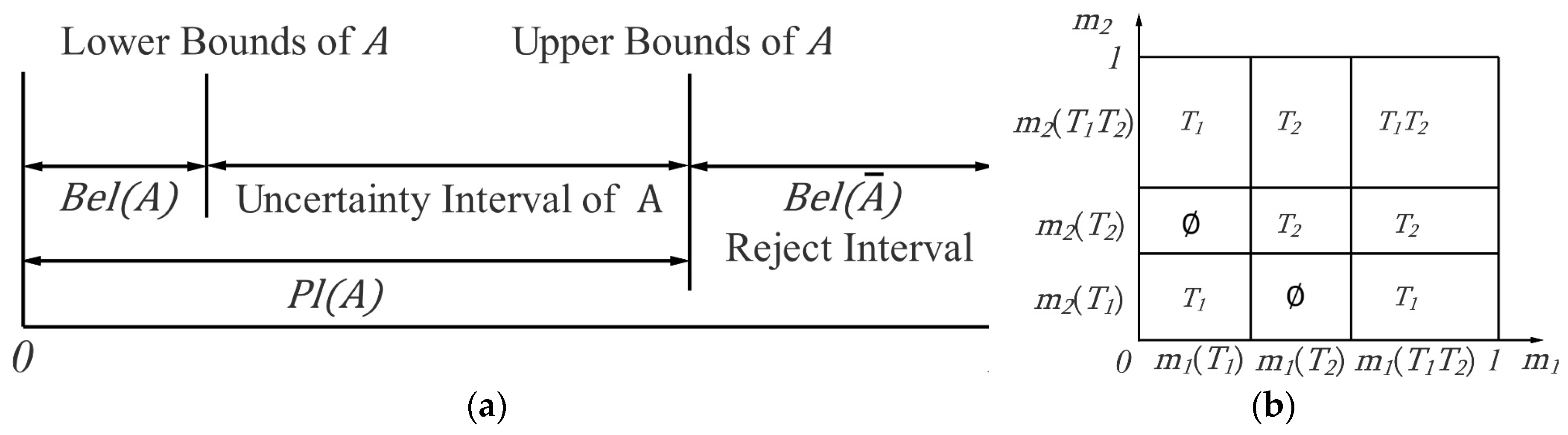
3.2.1. Theory Description
3.2.2. Dempster’s Combinational Rule
3.3. Trajectory Anomaly Hypothesis
4. Experiment of the Proposed Approach
4.1. Data Pre-Processing and Trajectory Extraction
4.2. Parameter Selection and Combination Analysis
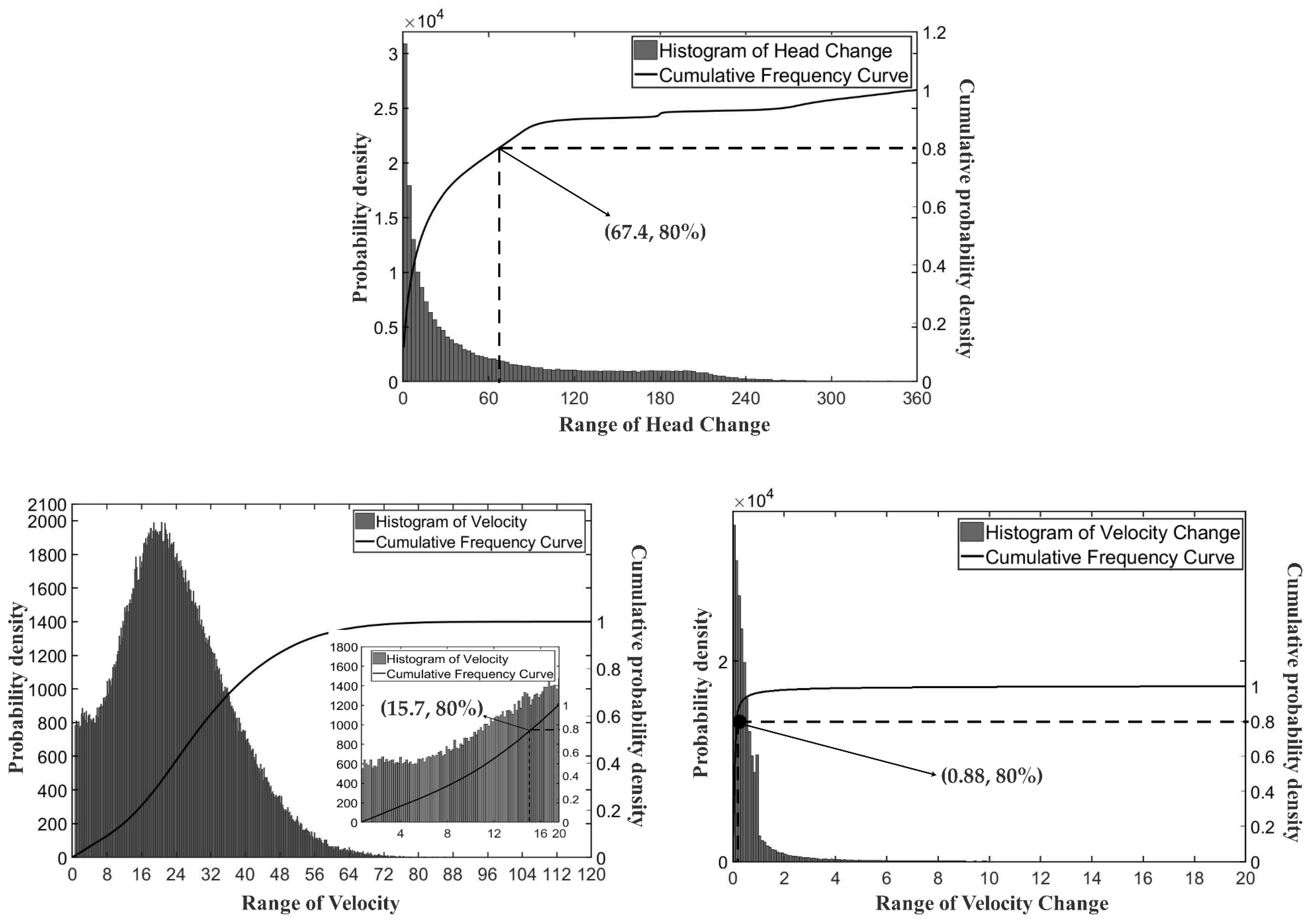
4.2.1. Parameter Selection for , and
4.2.2. Combination Analysis of Trajectory Feature
4.3. Anomalous Trajectory Results and Analysis
4.3.1. Comparison with Clustering Method
4.3.2. Statistical Analysis of the Anomalous Trajectory
4.4. Anomalous Trajectory Interpretation
5. Discussion
6. Conclusions and Future Research
Author Contributions
Funding
Conflicts of Interest
References
- Liu, X.; Ban, Y. Uncovering Spatio-Temporal Cluster Patterns Using Massive Floating Car Data. ISPRS Int. J. Geo-Inf. 2013, 2, 371–384. [Google Scholar] [CrossRef]
- Veloso, M.; Phithakkitnukoon, S.; Bento, C. Urban mobility study using taxi traces. In Proceedings of the 2011 International Workshop on Trajectory Data Mining and Analysis, Beijing, China, 18 September 2011; pp. 23–30. [Google Scholar]
- Matsubara, Y.; Li, L.; Papalexakis, E.; Lo, D.; Sakurai, Y.; Faloutsos, C. F-Trail: Finding Patterns in Taxi Trajectories. In Proceedings of the Pacific-Asia Conference on Knowledge Discovery and Data Mining, Gold Coast, Australia, 14–17 April 2013; pp. 86–98. [Google Scholar]
- Owens, J.; Hunter, A. Application of the self-organising map to trajectory classification. In Proceedings of the Third IEEE International Workshop on Visual Surveillance, Dublin, Ireland, 1 July 2000. [Google Scholar]
- Foresti, G.L.; Mahonen, P.; Regazzoni, C.S. Multimedia Video-Based Surveillance Systems: Requirements, Issues, and Solutions; Springer US: New York, NY, USA, 2000. [Google Scholar]
- Marcenaro, L.; Oberti, F.; Foresti, G.L.; Regazzoni, C.S. Distributed architectures and logical-task decomposition in multimedia surveillance systems. Proc. IEEE 2001, 89, 1419–1440. [Google Scholar] [CrossRef]
- Saul, H.; Junghans, M.; Leich, A. Identifying Hazardous Locations at Intersections by Automatic Traffic Surveillance. Available online: https://uknowledge.uky.edu/cgi/viewcontent.cgi?referer=https://www.google.com/&httpsredir=1&article=2069&context=ktc_researchreports (accessed on 20 September 2018).
- Detzer, S.; Junghans, M.; Kozempel, K.; Saul, H. Analysis of traffic safety for cyclists: The automatic detection of critical traffic situations for cyclists. In Proceedings of the 20th International Conference on Urban Transport and the Environment, Faro Algarve, Portugal, 28–30 May 2004; pp. 491–503. [Google Scholar]
- Junghans, M.; Kozempel, K.; Saul, H. Chances for the evaluation of the traffic safety risk at intersections by novel methods. J. Sci. Pract. Econ. 2015, 1. Available online: https://elib.dlr.de/95641/1/2015_Chances%20for%20the%20evaluation%20of%20the%20traffic%20safey%20risk%20at%20intersections%20by%20novel%20methods%20(Journal%20Transport%20Rossiskoi%20Federazii).pdf (accessed on 20 September 2018).
- Li, Z.; Filev, D.P.; Kolmanovsky, I.; Atkins, E.; Lu, J. A new clustering algorithm for processing GPS-based road anomaly reports with a mahalanobis distance. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1980–1988. [Google Scholar] [CrossRef]
- Chen, Q.; Qiu, Q.; Li, H.; Wu, Q. A neuromorphic architecture for anomaly detection in autonomous large-area traffic monitoring. In Proceedings of the International Conference on Computer-Aided Design, San Jose, CA, USA, 18–21 November 2013; pp. 202–205. [Google Scholar]
- Wang, Y.; Qin, K.; Chen, Y.; Zhao, P.X. Detecting Anomalous Trajectories and Behavior Patterns Using Hierarchical Clustering from Taxi GPS Data. ISPRS Int. J. Geo-Inf. 2018, 7, 25. [Google Scholar] [CrossRef]
- Zhang, D.; Li, N.; Zhou, Z.; Chen, C.; Sun, L.; Li, S. iBAT: detecting anomalous taxi trajectories from GPS traces. In Proceedings of the 13th International Conference on Ubiquitous Computing, Beijing, China, 17–21 September 2011; pp. 99–108. [Google Scholar]
- Chen, C.; Zhang, D.; Castro, P.S.; Li, N.; Sun, L.; Li, S.; Wang, Z. iBOAT: Isolation-Based Online Anomalous Trajectory Detection. IEEE Trans. Intell. Transp. Syst. 2013, 14, 806–818. [Google Scholar] [CrossRef]
- Zhou, Z.; Dou, W.; Jia, G.; Hu, C.; Xu, X.; Wu, X.; Pan, J. A method for real-time trajectory monitoring to improve taxi service using GPS big data. Inf. Manag. 2016, 53, 964–977. [Google Scholar] [CrossRef]
- Lee, J.G.; Han, J.; Li, X. Trajectory Outlier Detection: A Partition-and-Detect Framework. In Proceedings of the 2008 IEEE 24th International Conference on Data Engineering, Cancun, Mexico, 7–12 April 2008; pp. 140–149. [Google Scholar]
- Liu, L.; Qiao, S.; Zhang, Y.; Hu, J. An efficient outlying trajectories mining approach based on relative distance. Int. J. Geogr. Inf. Sci. 2012, 26, 1789–1810. [Google Scholar] [CrossRef]
- Lei, P.R. A framework for anomaly detection in maritime trajectory behavior. Knowl. Inf. Syst. 2016, 47, 189–214. [Google Scholar] [CrossRef]
- Zhu, J.; Jiang, W.; Liu, A.; Liu, G.; Zhao, L. Effective and efficient trajectory outlier detection based on time-dependent popular route. World Wide Web 2016, 20, 111–134. [Google Scholar] [CrossRef]
- Li, X.; Han, J.; Kim, S. Motion-Alert: Automatic Anomaly Detection in Massive Moving Objects. In Proceedings of the International Conference on Intelligence and Security Informatics, San Diego, CA, USA, 23–24 May 2006; pp. 166–177. [Google Scholar]
- Yang, W.; Gao, Y.; Cao, L. TRASMIL: A local anomaly detection framework based on trajectory segmentation and multi-instance learning. Comput. Vis. Image Underst. 2013, 117, 1273–1286. [Google Scholar] [CrossRef]
- Liu, L.X.; Qiao, S.J.; Liu, B.; Le, J.J.; Tang, C.J. Efficient trajectory outlier detection algorithm based on R-Tree. J. Softw. 2009, 20, 2426–2435. [Google Scholar]
- Han, B.; Wang, Z.; Jin, B. An anomaly detection algorithm for taxis based on trajectory data mining and online real-time monitoring. J. Univ. Sci. Technol. China 2016, 46, 247–252. (In Chinese) [Google Scholar]
- Huang, H. Anomalous behavior detection in single-trajectory data. Int. J. Geogr. Inf. Sci. 2015, 29, 2075–2094. [Google Scholar] [CrossRef]
- Ge, Y.; Xiong, H.; Liu, C.; Zhou, Z.H. A Taxi Driving Fraud Detection System. In Proceedings of the 2011 IEEE 11th International Conference on Data Mining, Vancouver, BC, Canada, 11–14 December 2012; pp. 181–190. [Google Scholar]
- Zhou, Y.; Fang, Z.X.; Li, Q.Q.; Guo, S. Anomalous Taxi Trajectory Detection Based on Experiential Constraint Rules and Evidence Theory. Geomat. Inf. Sci. Wuhan Univ. 2016, 41, 797–802. Available online: http://ch.whu.edu.cn/CN/abstract/abstract5466.shtml (accessed on 20 September 2018). (In Chinese).
- Chen, Q.; Whitbrook, A.; Aickelin, U.; Roadknight, C. Data classification using the Dempster-Shafer method. J. Exp. Theor. Artif. Intell. 2014, 26, 493–517. [Google Scholar] [CrossRef]
- Ge, Y.; Liu, C.; Xiong, H.; Chen, J. A taxi business intelligence system. In Proceedings of the 17th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Diego, CA, USA, 21–24 August 2011; pp. 735–738. [Google Scholar]
- Hanssen, T.E.S.; Mathisen, T.A.; Jørgensen, F. Generalized Transport Costs in Intermodal Freight Transport. Procedia-Soc. Behav. Sci. 2012, 54, 189–200. [Google Scholar] [CrossRef]
- Das, R.; Winter, S. Detecting Urban Transport Modes Using a Hybrid Knowledge Driven Framework from GPS Trajectory. ISPRS Int. J. Geo-Inf. 2016, 5, 207. [Google Scholar] [CrossRef]
- Sadilek, A.; Kautz, H. Recognizing multi-agent activities from GPS data. In Proceedings of the Twenty-Fourth AAAI Conference on Artificial Intelligence, Atlanta, GA, USA, 11–15 July 2010; pp. 1134–1139. [Google Scholar]
- Zhao, X.; Cheng, X.; Zhou, J.; Xu, Z.; Dey, N.; Ashour, A.S.; Satapathy, S.C. Advanced Topological Map Matching Algorithm Based on D-S Theory. Arab. J. Sci. Eng. 2017, 43, 3863–3874. [Google Scholar] [CrossRef]
- Xiao, G.; Juan, Z.; Zhang, C. Travel mode detection based on GPS track data and Bayesian networks. Comput. Environ. Urban Syst. 2015, 54, 14–22. [Google Scholar] [CrossRef]
- Pang, L.X.; Chawla, S.; Liu, W.; Zheng, Y. On detection of emerging anomalous traffic patterns using GPS data. Data Knowl. Eng. 2013, 87, 357–373. [Google Scholar] [CrossRef]
- Essa, I. Gaussian process regression flow for analysis of motion trajectories. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 1164–1171. [Google Scholar]
- Ye, F.; Chen, J.; Li, Y.B. Improvement of DS Evidence Theory for Multi-Sensor Conflicting Information. Symmetry 2017, 9, 69. [Google Scholar]
- Dymova, L.; Sevastjanov, L. An interpretation of intuitionistic fuzzy sets in terms of evidence theory: Decision making aspect. Knowl. Based Syst. 2010, 23, 772–782. [Google Scholar] [CrossRef]
- Dong, G.; Kuang, G. Target Recognition via Information Aggregation Through Dempster-Shafer’s Evidence Theory. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1247–1251. [Google Scholar] [CrossRef]
- Talavera, A.; Aguasca, R.; Galván, B.; Cacereño, A. Application of Dempster-Shafer theory for the quantification and propagation of the uncertainty caused by the use of AIS data. Reliab. Eng. Syst. Saf. 2013, 111, 95–105. [Google Scholar] [CrossRef]
- Kong, Q.; Chen, Y.; Liu, Y. An improved evidential fusion approach for real-time urban link speed estimation. In Proceedings of the Intelligent Transportation Systems Conference, Seattle, WA, USA, 30 September–3 October 2007; pp. 562–567. [Google Scholar]
- Zhang, N.; Xu, J.; Lin, P.Q.; Zhang, M. An approach for real-time urban traffic state estimation by fusing multisource traffic data. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; pp. 4077–4081. [Google Scholar]
- Baloian, N.; Frez, J.; Pino, J.A.; Zurita, G. Efficient Planning of Urban Public Transportation Networks. In Proceedings of the International Conference on Ubiquitous Computing and Ambient Intelligence, Puerto Varas, Chile, 1–4 December 2015; pp. 439–448. [Google Scholar]
- De Souza, R.P.; Carmo, L.F.R.C.; Pirmez, L. An enhanced bootstrap method to detect possible fraudulent behavior in testing facilities. Accredit. Qual. Assur. 2017, 22, 21–27. [Google Scholar] [CrossRef]
- Johnson, D.B. A Note on Dijkstra’s Shortest Path Algorithm. J. ACM 1973, 20, 385–388. [Google Scholar] [CrossRef]
- Zhou, D.; Wei, T.; Zhang, H.; Ma, S.; Wei, F. An Information Fusion Model Based on Dempster-Shafer Evidence Theory for Equipment Diagnosis. ASCE-ASME J. Risk Uncertain. Eng. Syst. 2018, 4. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976. [Google Scholar]
- Yager, R.R.; Liu, L. Classic Works of the Dempster-Shafer Theory of Belief Functions; Springer: Berlin, Germany, 2010. [Google Scholar]
- Murphy, C.K. Combining belief functions when evidence conflicts. Decis. Support Syst. 2000, 29, 1–9. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Q.; Chen, Y.; Xie, X.; Ma, W.Y. Understanding mobility based on GPS data. In Proceedings of the International Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; pp. 312–321. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.005 | |||
| 0.005 | 0.005 |
| Vehicle ID | Time | Longitude | Latitude | Direction | ACC | State |
|---|---|---|---|---|---|---|
| 0001 | 00:10:05 | 114 **** | 30 **** | 122 | On | empty |
| 0002 | 00:10:05 | 114 **** | 30 **** | NULL | On | heave |
| 0003 | 00:10:05 | 114 **** | 30 **** | NULL | Off | empty |
| … | … | … | … | … | … | … |
| 0001 | 00:11:05 | 114 **** | 30 **** | NULL | On | heave |
| 0002 | 00:11:05 | 114 **** | 30 **** | 55 | On | empty |
| 0003 | 00:10:05 | 114 **** | 30 **** | 10 | On | heave |
| Index | 2 Features | Index | 3 Features | Index | 4 Features | Index | 5 Features |
|---|---|---|---|---|---|---|---|
| 1 | () | 11 | () | 21 | () | 26 | () |
| 2 | () | 12 | () | 22 | () | ||
| 3 | () | 13 | () | 23 | () | ||
| 4 | () | 14 | () | 24 | () | ||
| 5 | () | 15 | () | 25 | () | ||
| 6 | () | 16 | () | ||||
| 7 | () | 17 | () | ||||
| 8 | () | 18 | () | ||||
| 9 | () | 19 | () | ||||
| 10 | () | 20 | () |
| Trajectory Numbers | Average Time (min) | Average Lengths (km) | Average | Average | Average | Average | Average | |
|---|---|---|---|---|---|---|---|---|
| Anomalous Trajectories | 408 | 5.731 | 2.005 | 0.551 | 0.564 | 0.605 | 0.502 | 0.546 |
| Normal Trajectories | 36,547 | 6.882 | 3.549 | 0.068 | 0.111 | 0.208 | 0.207 | 0.196 |
| All Trajectories | 36,955 | 6.869 | 3.532 | 0.073 | 0.067 | 0.131 | 0.034 | 0.278 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, K.; Wang, Y.; Wang, B. Detecting Anomalous Trajectories Using the Dempster-Shafer Evidence Theory Considering Trajectory Features from Taxi GNSS Data. Information 2018, 9, 258. https://doi.org/10.3390/info9100258
Qin K, Wang Y, Wang B. Detecting Anomalous Trajectories Using the Dempster-Shafer Evidence Theory Considering Trajectory Features from Taxi GNSS Data. Information. 2018; 9(10):258. https://doi.org/10.3390/info9100258
Chicago/Turabian StyleQin, Kun, Yulong Wang, and Bijun Wang. 2018. "Detecting Anomalous Trajectories Using the Dempster-Shafer Evidence Theory Considering Trajectory Features from Taxi GNSS Data" Information 9, no. 10: 258. https://doi.org/10.3390/info9100258
APA StyleQin, K., Wang, Y., & Wang, B. (2018). Detecting Anomalous Trajectories Using the Dempster-Shafer Evidence Theory Considering Trajectory Features from Taxi GNSS Data. Information, 9(10), 258. https://doi.org/10.3390/info9100258