Neutrosophic Similarity Score Based Weighted Histogram for Robust Mean-Shift Tracking


Abstract
:1. Introduction
2. Problem Formulation
2.1. Traditional Mean-Shift Tracker
2.2. Neutrosophic Similarity Score
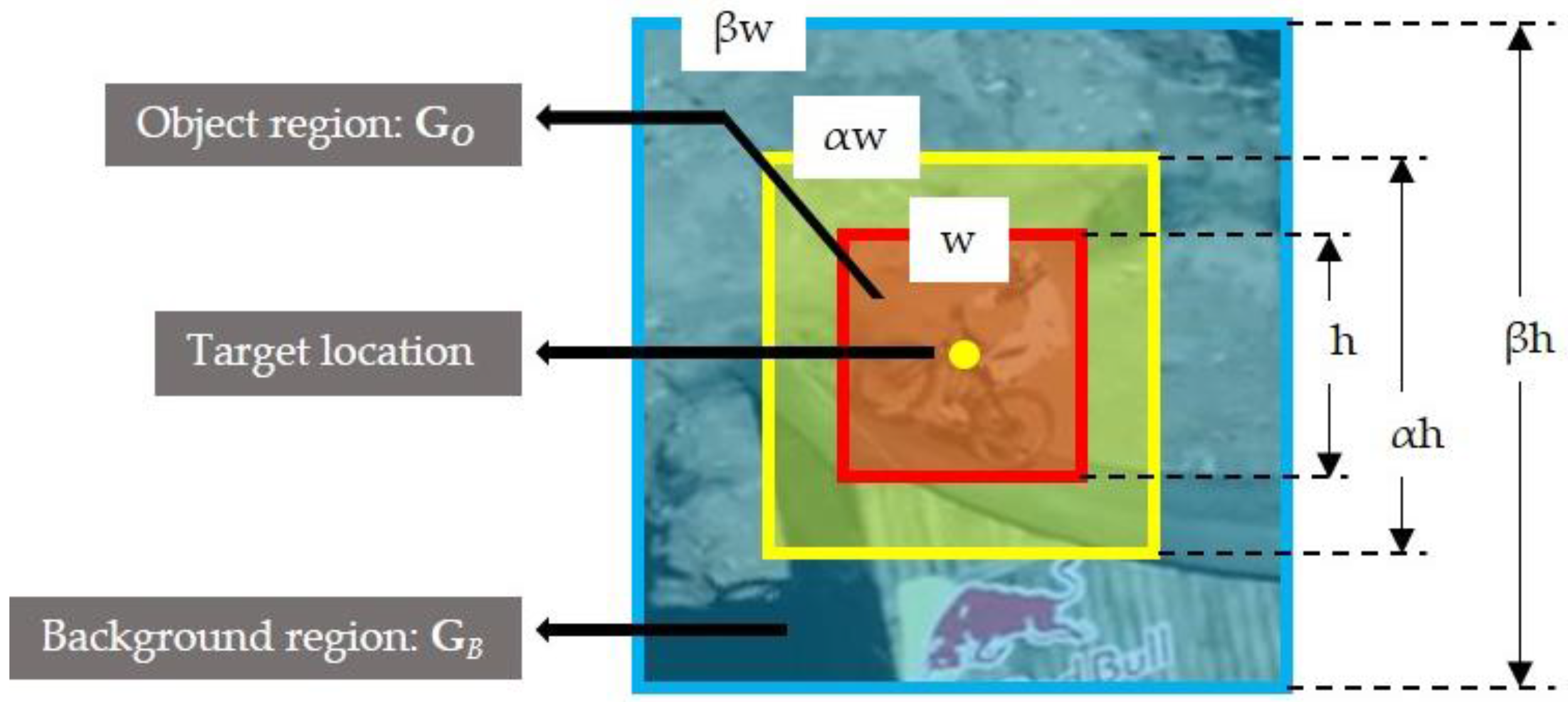
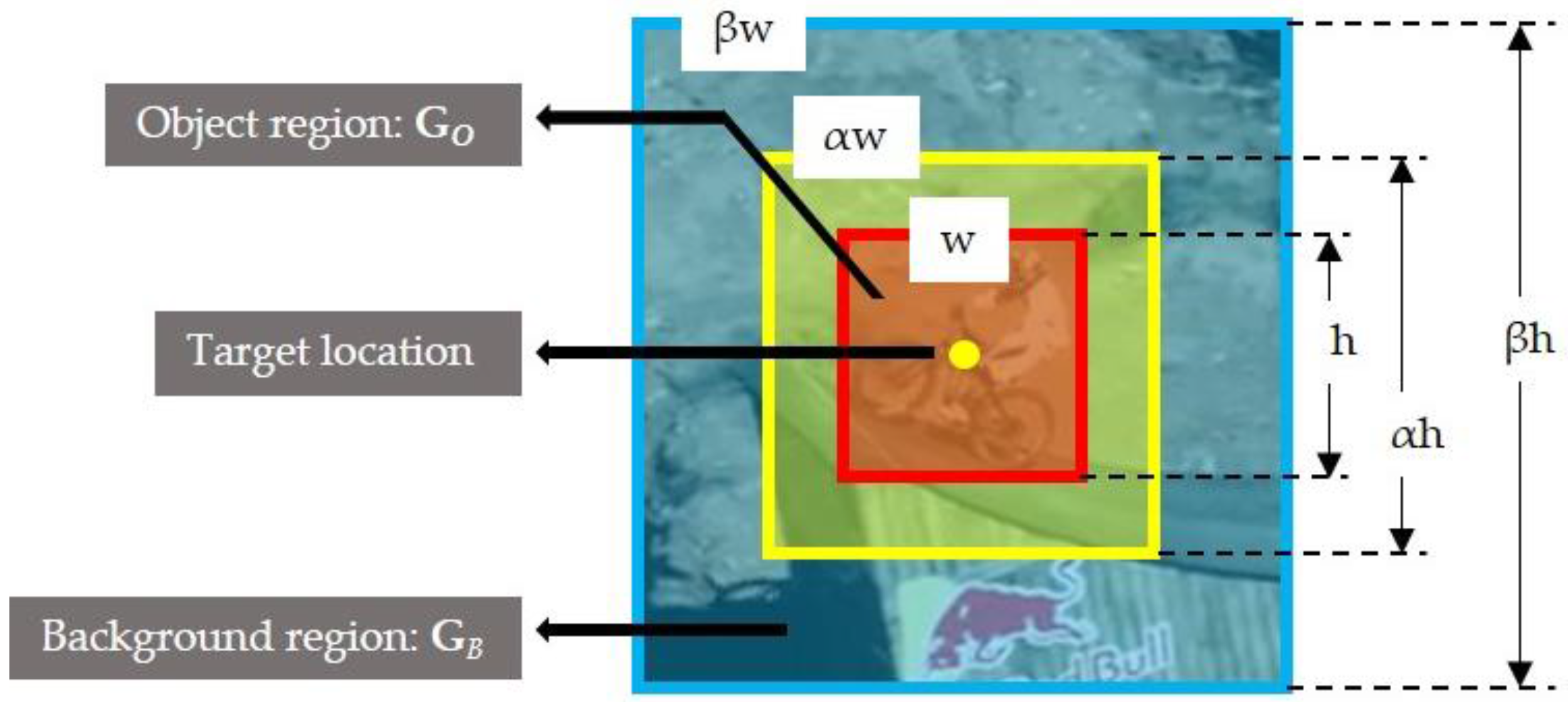
2.3. Calculate the Neutrosophic Weight Histogram
2.4. Neutrosophic Weighted Mean-Shift Tracker
- Step 1:
- Read the first frame and select an object on the image plane as the target to be tracked.
- Step 2:
- Calculate the object feature histogram and object background feature histogram by using Equation (1).
- Step 3:
- Employ the location in the previous frame as the starting location for searching the new target location in the current frame.
- Step 4:
- Based on the mean-shift algorithm and neutrosophic weight histogram, derive the new location of the object according to Equation (19) and Equation (5) as follows:
- Step 5:
- If , stop. Otherwise, set and go to Step 4.
- Step 6:
- Derive according to Equation (14) and then update object background feature histogram when the Bhattacharyya coefficient , where is the corresponding feature histogram in the current background region GB.
3. Experiment Results and Analysis
3.1. Setting Parameters
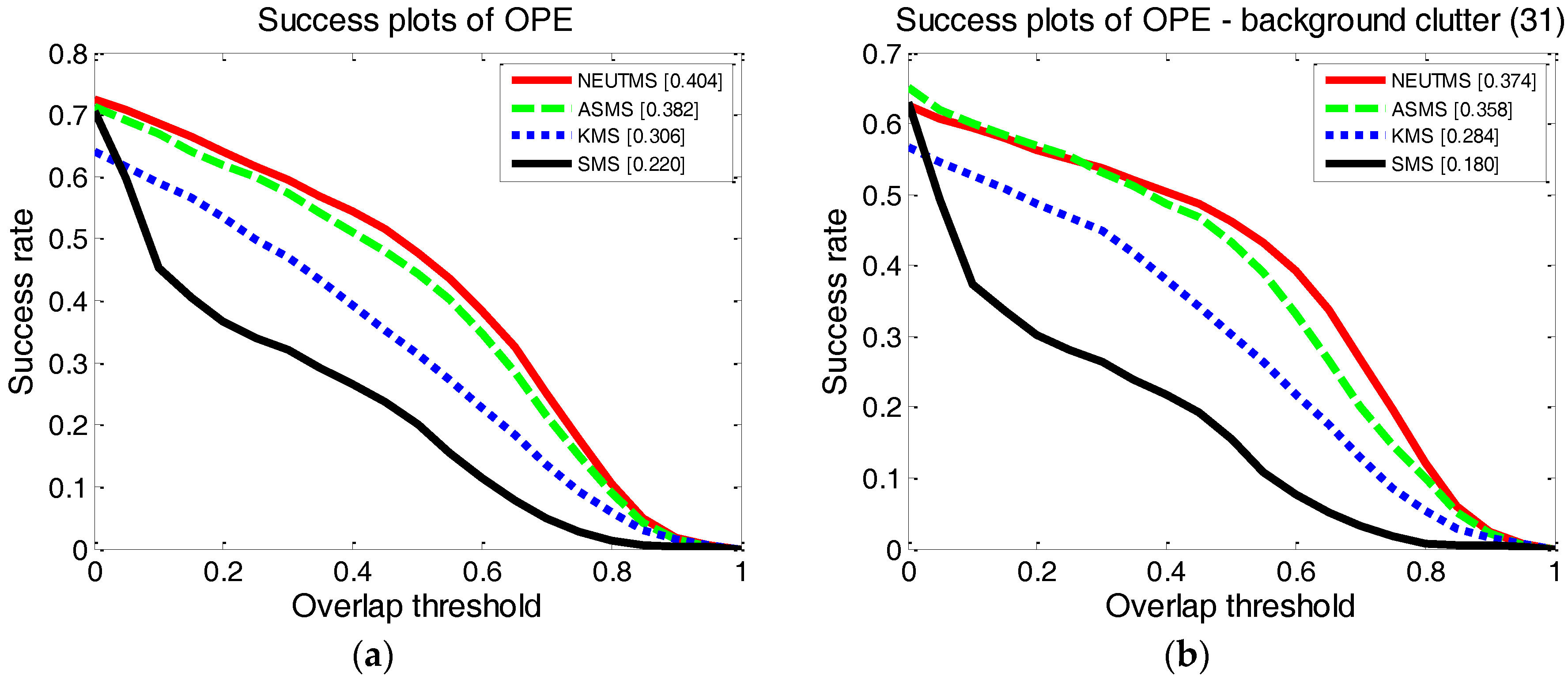
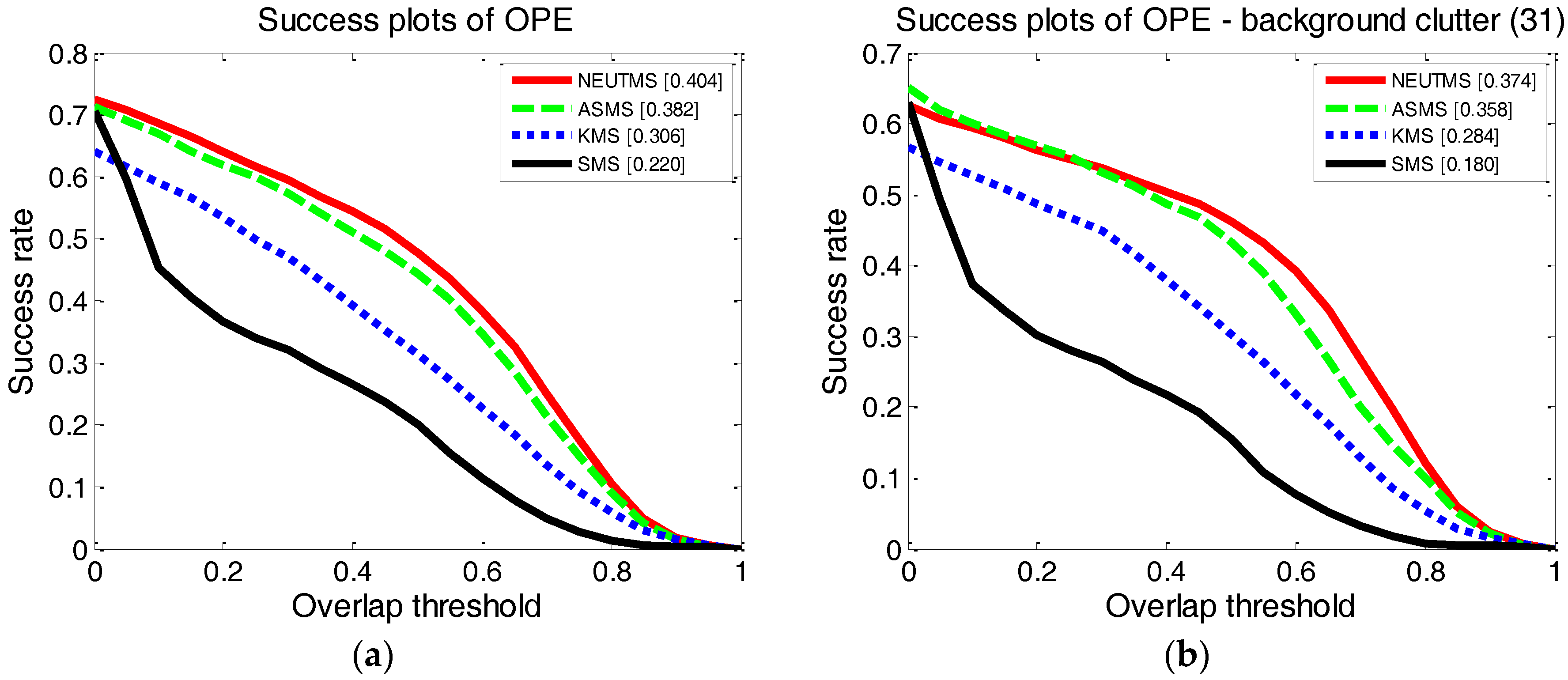
3.2. Evaluation Criteria
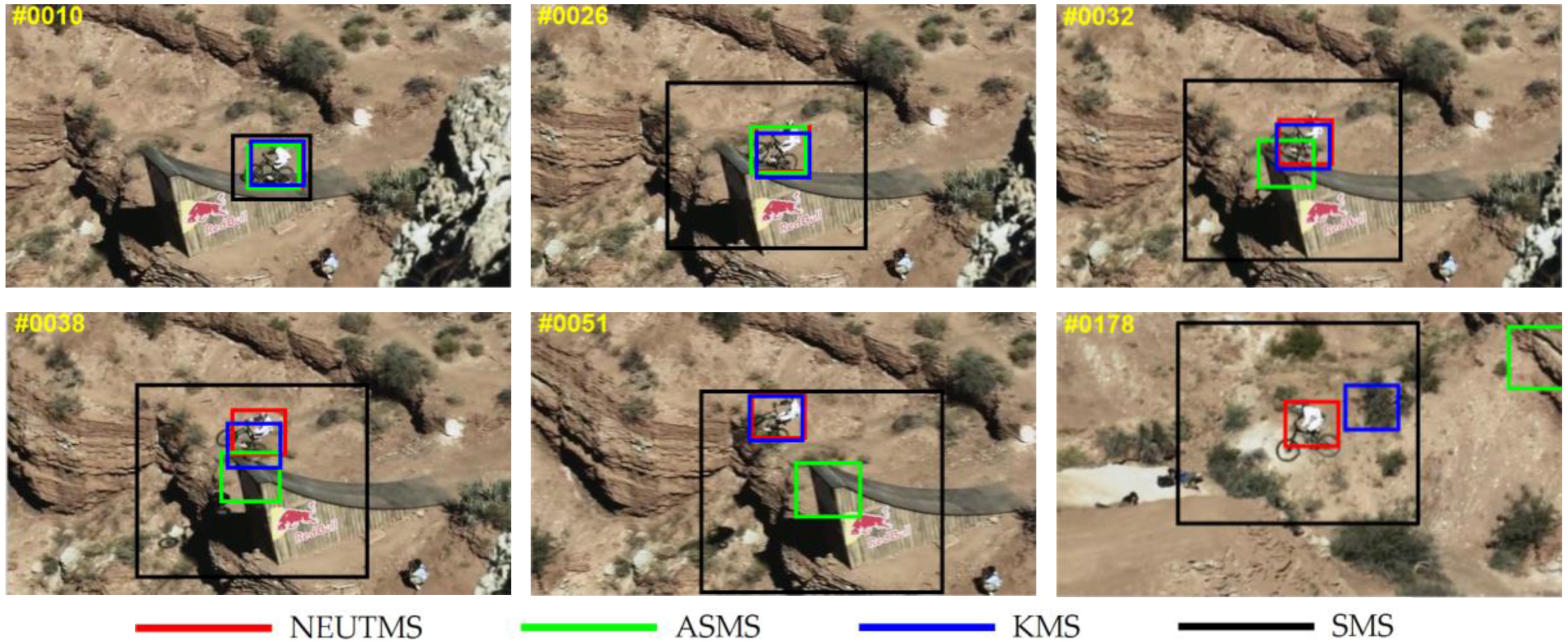
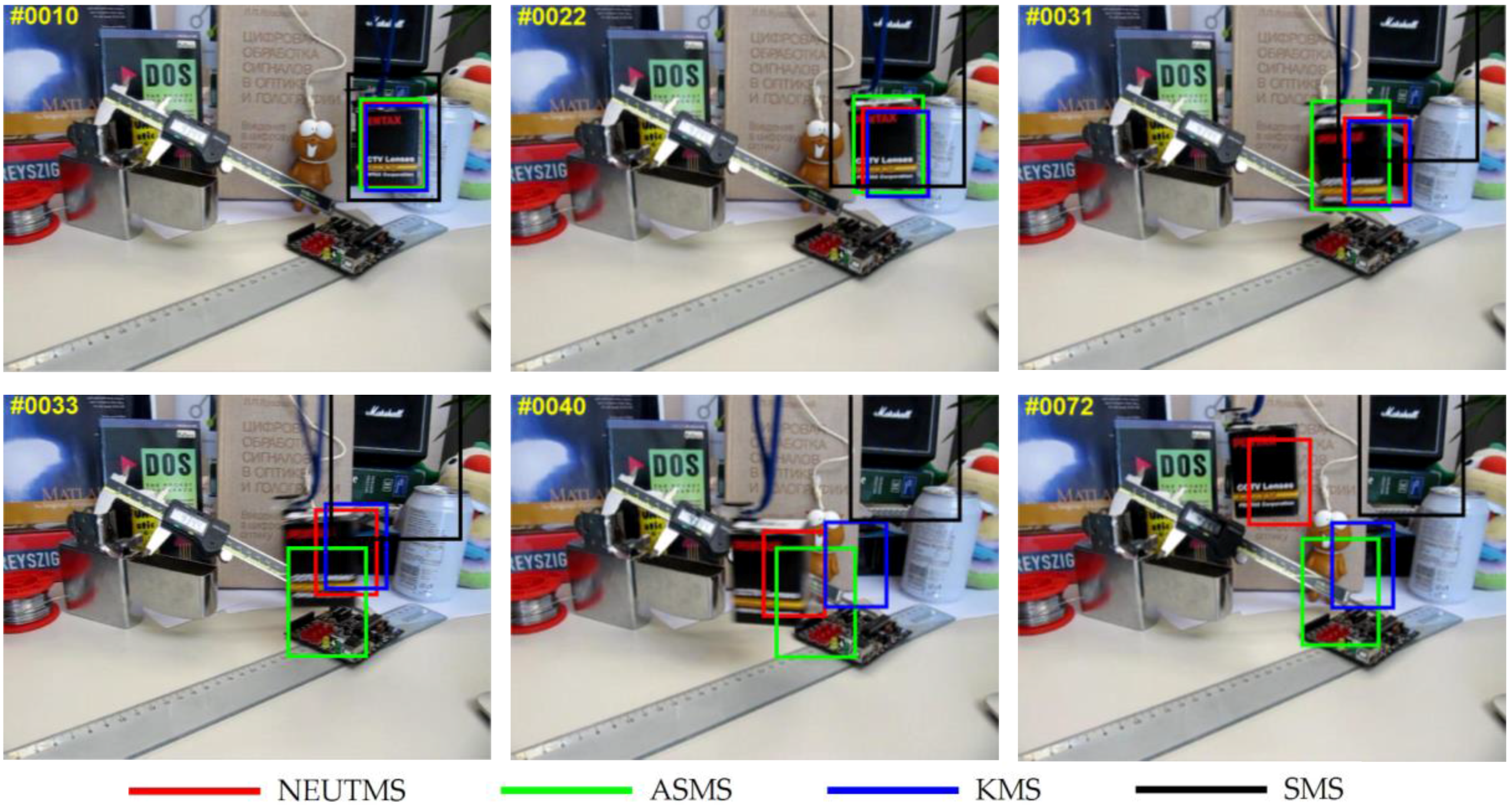
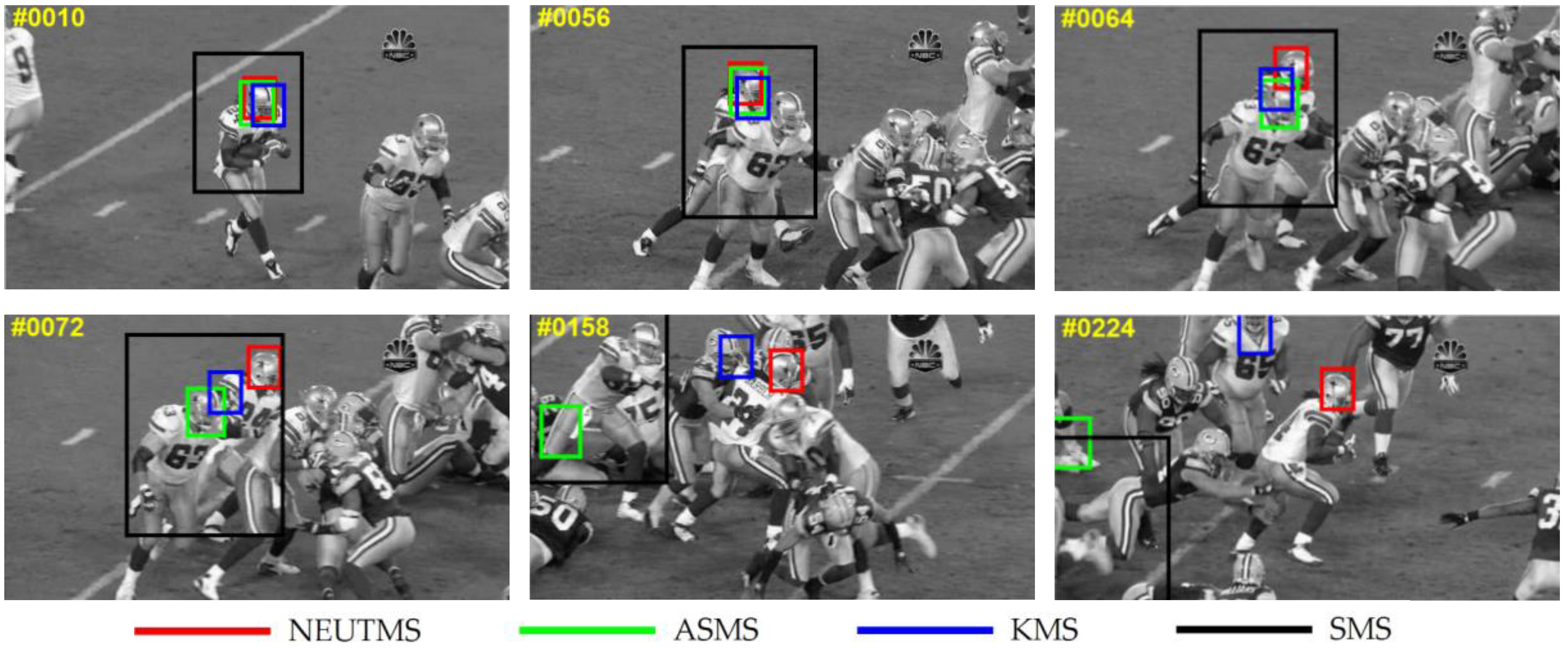
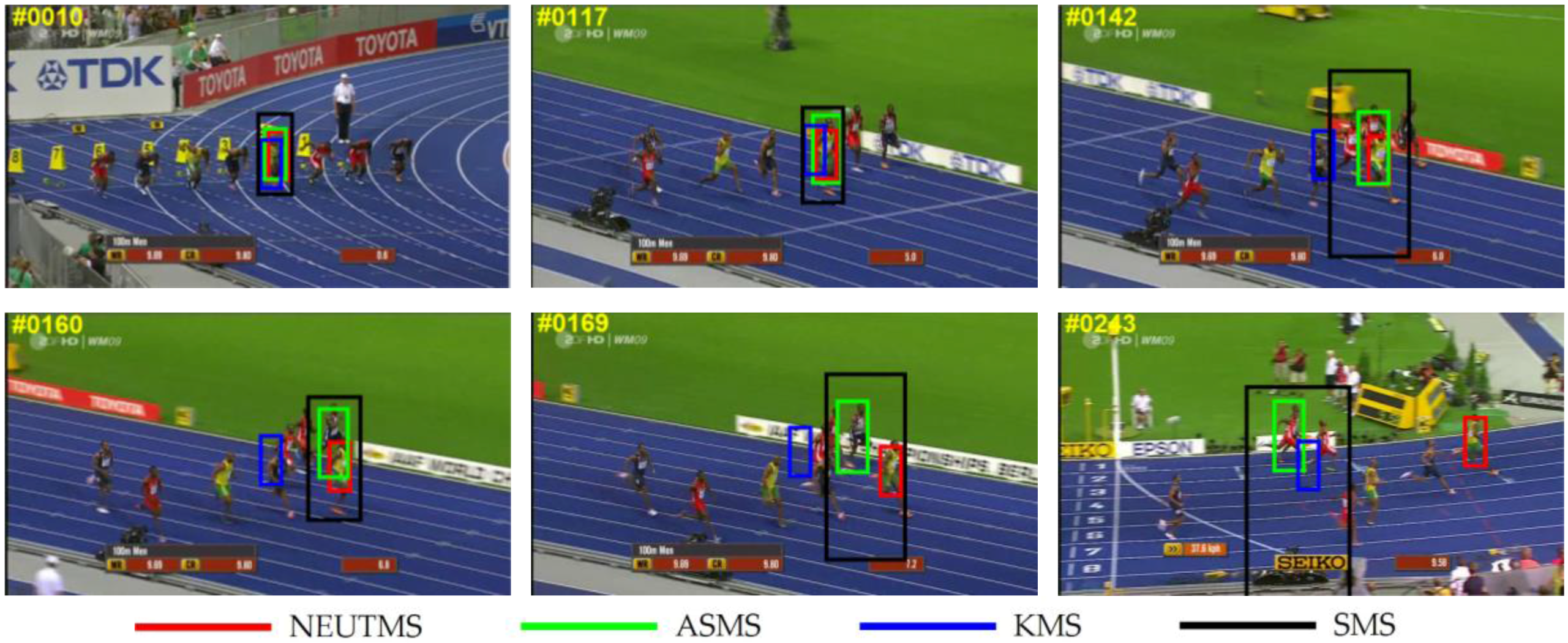
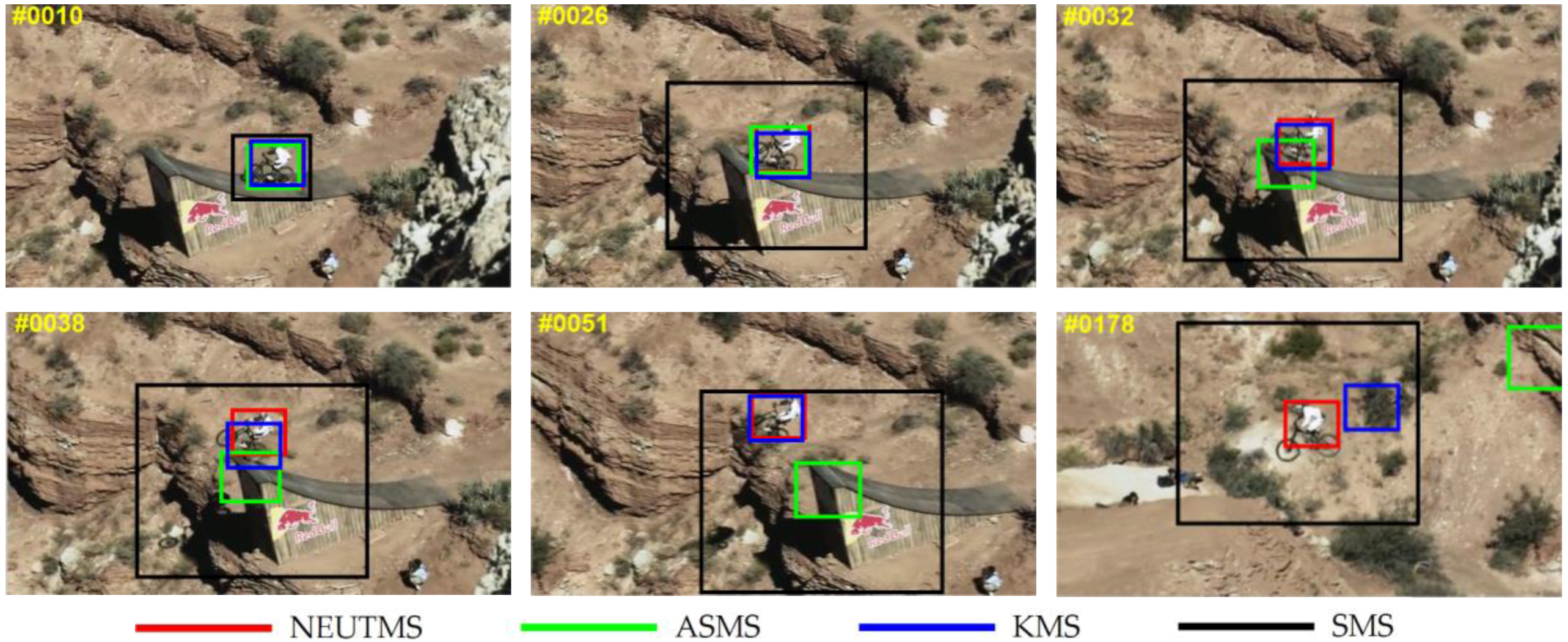
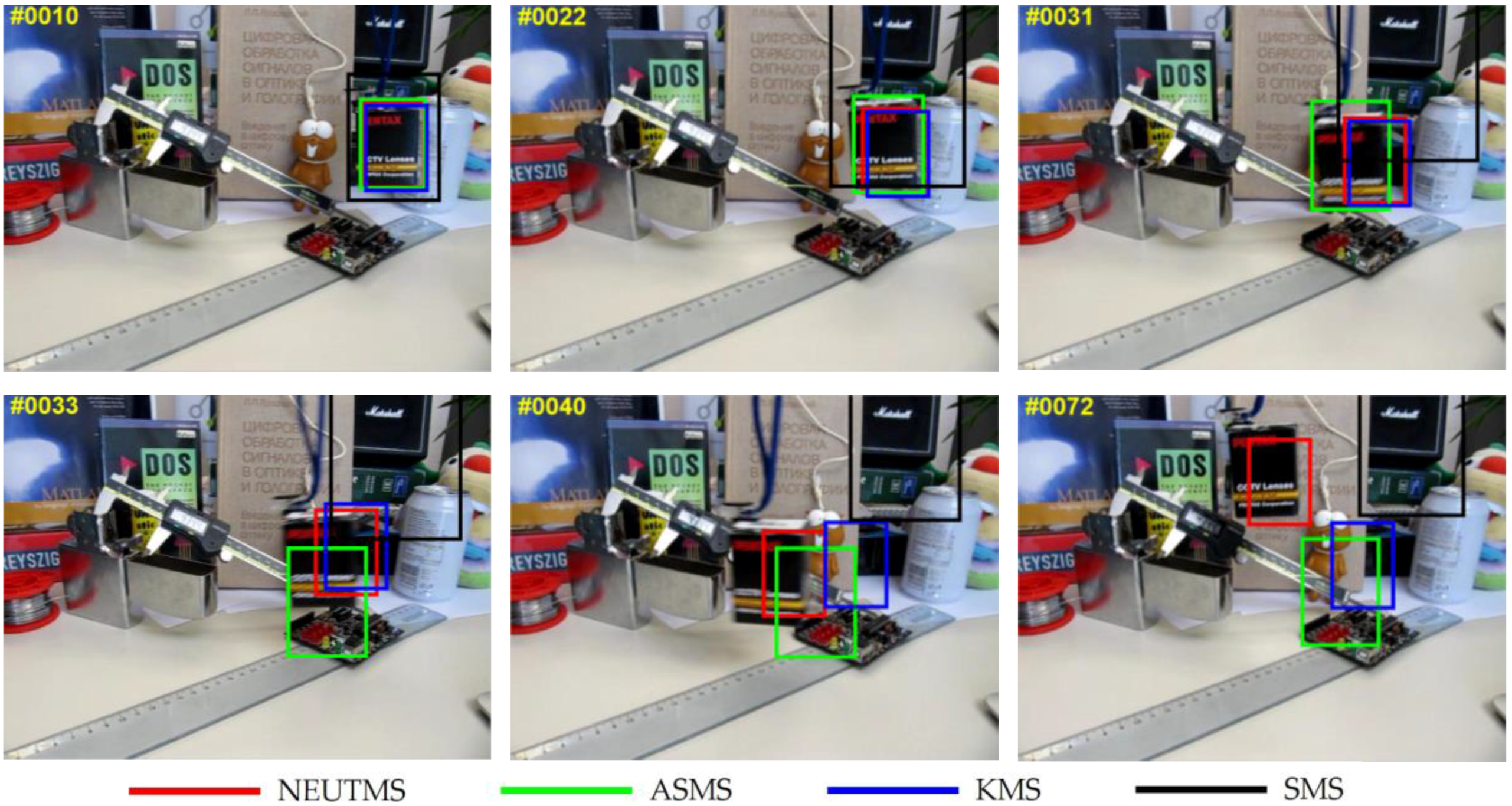
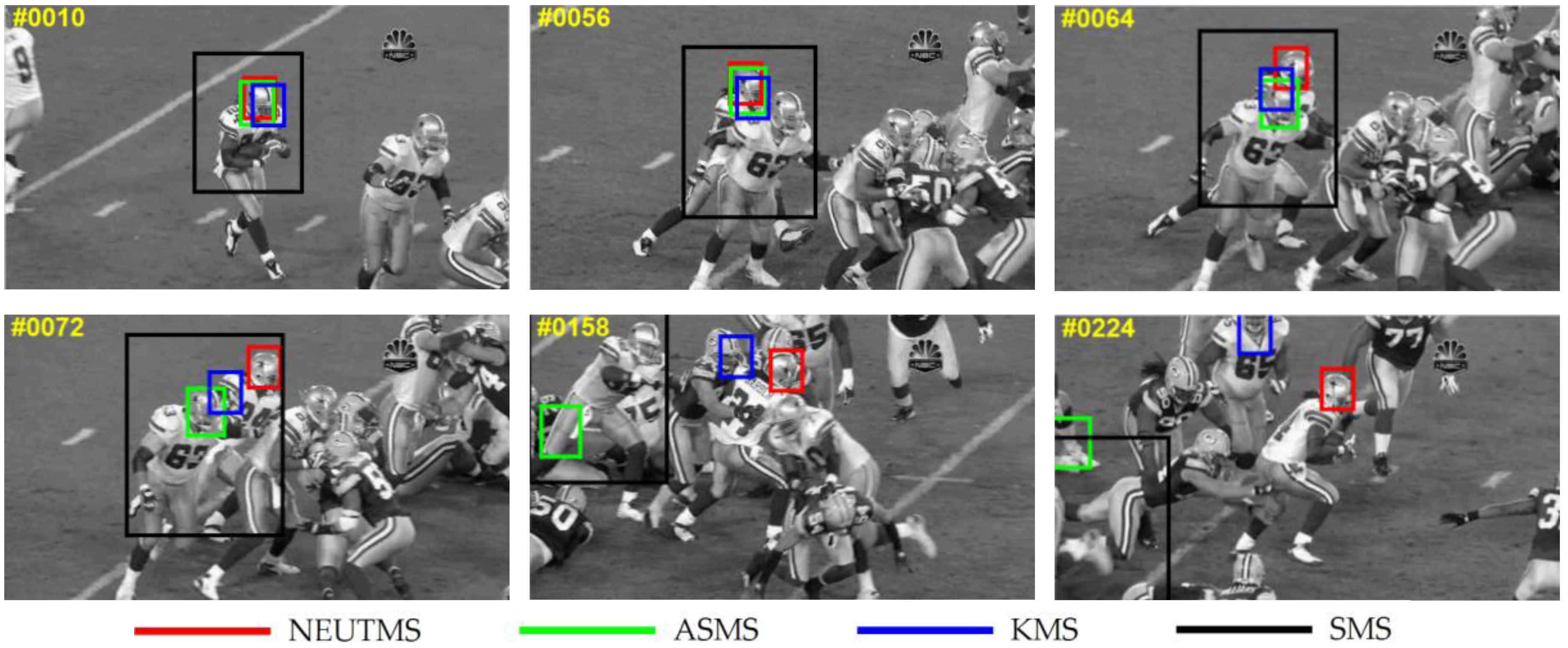
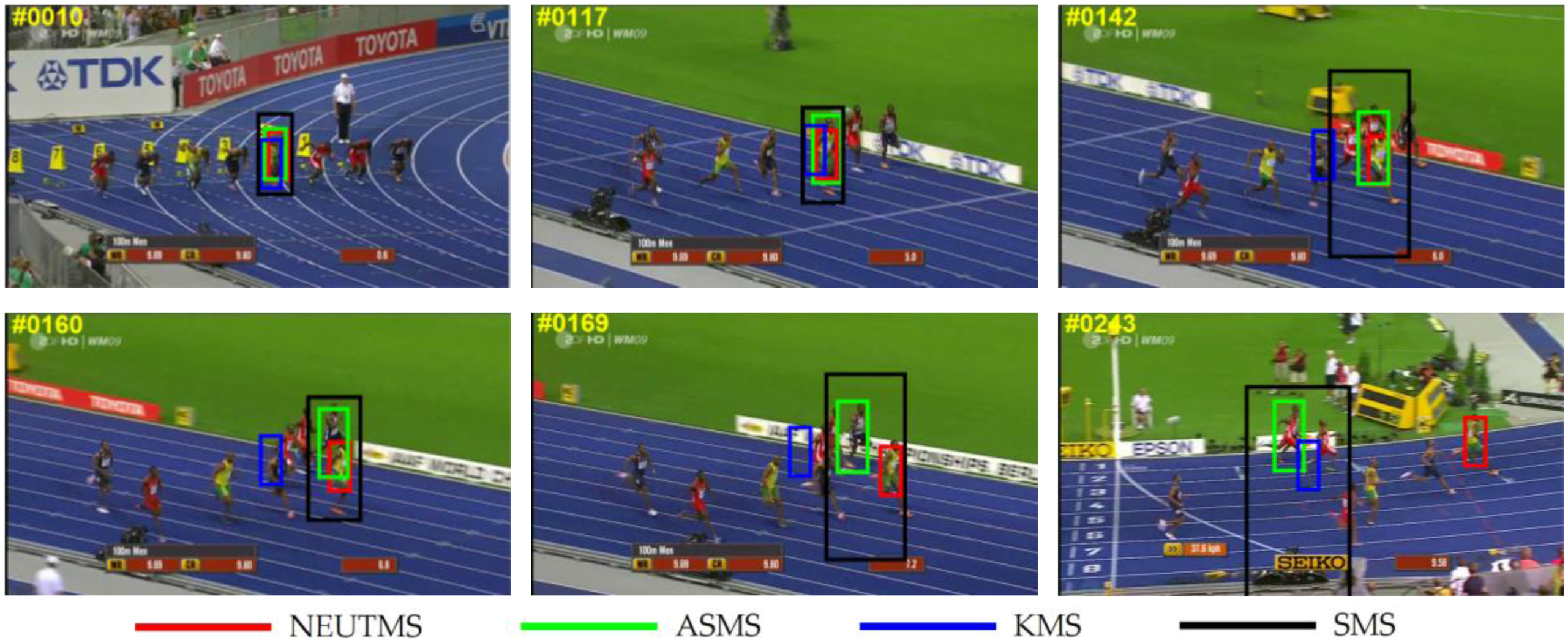
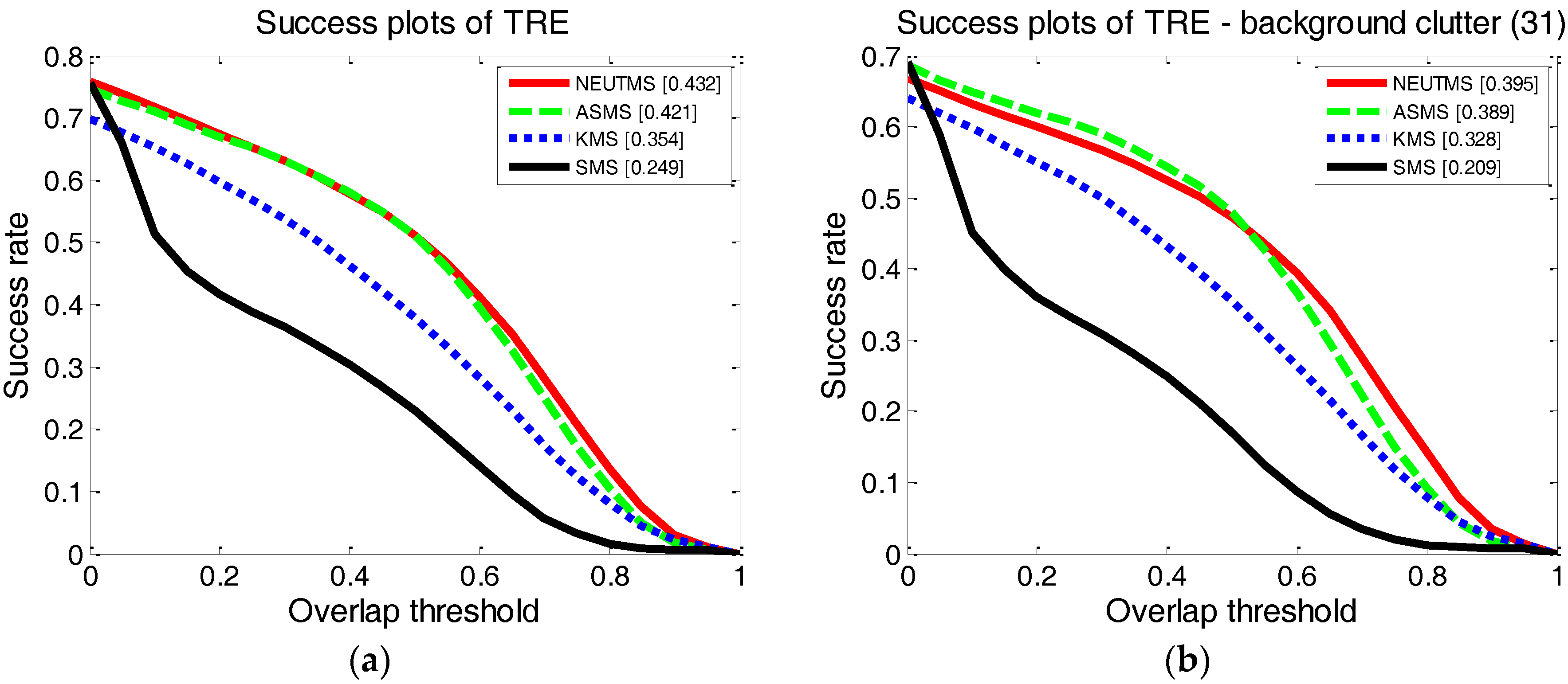
3.3. Tracking Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yilmaz, A.; Javed, O.; Shah, M. Object tracking: A survey. ACM Comp. Surv. 2006, 38, 13. [Google Scholar] [CrossRef]
- Wu, Y.; Lim, J.; Yang, M.H. Online object tracking: A benchmark. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 2411–2418. [Google Scholar]
- Smeulders, A.W.M.; Chu, D.M.; Cucchiara, R.; Calderara, S.; Dehghan, A.; Shah, M. Visual tracking: An experimental survey. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1442–1468. [Google Scholar] [PubMed]
- Grabner, H.; Bischof, H. On-line boosting and vision. In Proceedings of the IEEE Conference on Computer Vision Pattern Recognition (CVPR), New York, NY, USA, 17–22 June 2006; pp. 260–267. [Google Scholar]
- Grabner, H.; Leistner, C.; Bischof, H. Semi-supervised on-line boosting for robust tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Marseille, France, 12–18 October 2008; Forsyth, D., Torr, P., Zisserman, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 234–247. [Google Scholar]
- Babenko, B.; Ming-Hsuan, Y.; Belongie, S. Robust object tracking with online multiple instance learning. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1619–1632. [Google Scholar] [CrossRef] [PubMed]
- Kaihua, Z.; Lei, Z.; Ming-Hsuan, Y. Fast compressive tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 2002–2015. [Google Scholar]
- Comaniciu, D.; Ramesh, V.; Meer, P. Real-time tracking of non-rigid objects using mean shift. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Hilton Head Island, SC, USA, 15 June 2000; pp. 142–149. [Google Scholar]
- Comaniciu, D.; Ramesh, V.; Meer, P. Kernel-based object tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 564–577. [Google Scholar] [CrossRef]
- Leichter, I. Mean shift trackers with cross-bin metrics. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 695–706. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C. Video Object Tracking Using Sift and Mean Shift. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2011. [Google Scholar]
- Bousetouane, F.; Dib, L.; Snoussi, H. Improved mean shift integrating texture and color features for robust real time object tracking. Vis. Comput. 2013, 29, 155–170. [Google Scholar] [CrossRef]
- Vojir, T.; Noskova, J.; Matas, J. Robust scale-adaptive mean-shift for tracking. Pattern Recognit. Lett. 2014, 49, 250–258. [Google Scholar] [CrossRef]
- Collins, R.T. Mean-shift blob tracking through scale space. In Proceedings of the IEEE Conference on Computer Vision Pattern Recognition (CVPR), Madison, WI, USA, 18–20 June 2003; p. 234. [Google Scholar]
- Lindeberg, T. Scale-Space Theory in Computer Vision; Kluwer Academic: Norwell, MA, USA, 1994; pp. 349–382. [Google Scholar]
- Smarandache, F. Neutrosophy: Neutrosophic Probability, Set and Logic; American Research Press: Rehoboth, DE, USA, 1998; p. 105. [Google Scholar]
- Guo, Y.; Şengür, A. A novel image segmentation algorithm based on neutrosophic similarity clustering. Appl. Soft Comp. 2014, 25, 391–398. [Google Scholar] [CrossRef]
- Anter, A.M.; Hassanien, A.E.; ElSoud, M.A.A.; Tolba, M.F. Neutrosophic sets and fuzzy c-means clustering for improving CT liver image segmentation. Adv. Intell. Syst. Comput. 2014, 303, 193–203. [Google Scholar]
- Karabatak, E.; Guo, Y.; Sengur, A. Modified neutrosophic approach to color image segmentation. J. Electron. Imag. 2013, 22, 4049–4068. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, L.; Cheng, H.D. A neutrosophic approach to image segmentation based on watershed method. Signal Process. 2010, 90, 1510–1517. [Google Scholar] [CrossRef]
- Guo, Y.; Şengür, A.; Ye, J. A novel image thresholding algorithm based on neutrosophic similarity score. Measurement 2014, 58, 175–186. [Google Scholar] [CrossRef]
- El-Hefenawy, N.; Metwally, M.A.; Ahmed, Z.M.; El-Henawy, I.M. A review on the applications of neutrosophic sets. J. Comput. Theor. Nanosci. 2016, 13, 936–944. [Google Scholar] [CrossRef]
- Guo, Y.; Sengur, A. A novel 3D skeleton algorithm based on neutrosophic cost function. Appl. Soft Comput. 2015, 36, 210–217. [Google Scholar] [CrossRef]
- Hu, K.; Ye, J.; Fan, E.; Shen, S.; Huang, L.; Pi, J. A novel object tracking algorithm by fusing color and depth information based on single valued neutrosophic cross-entropy. J. Intell. Fuzzy Syst. 2017, 32, 1775–1786. [Google Scholar] [CrossRef]
- Guo, Y.; Sengur, A. NCM: Neutrosophic c-means clustering algorithm. Pattern Recognit. 2015, 48, 2710–2724. [Google Scholar] [CrossRef]
- Biswas, P.; Pramanik, S.; Giri, B.C. Topsis method for multi-attribute group decision-making under single-valued neutrosophic environment. Neural Comput. Appl. 2015, 27, 727–737. [Google Scholar] [CrossRef]
- Kharal, A. A neutrosophic multi-criteria decision making method. New Math. Nat. Comput. 2014, 10, 143–162. [Google Scholar] [CrossRef]
- Ye, J. Single valued neutrosophic cross-entropy for multicriteria decision making problems. Appl. Math. Model. 2014, 38, 1170–1175. [Google Scholar] [CrossRef]
- Majumdar, P. Neutrosophic sets and its applications to decision making. Adapt. Learn. Optim. 2015, 19, 97–115. [Google Scholar]
- Ye, J. Multicriteria decision-making method using the correlation coefficient under single-valued neutrosophic environment. Int. J. Gen. Syst. 2013, 42, 386–394. [Google Scholar] [CrossRef]
- Wang, H.; Smarandache, F.; Zhang, Y.; Sunderraman, R. Single valued neutrosophic sets. Multisp. Multistruct. 2010, 4, 410–413. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Target | Challenges | Frames |
|---|---|---|---|
| Board | board | SV, MB, FM, OPR, OV, BC | 698 |
| Bolt2 | human | DEF, BC | 293 |
| Box | box | IV, SV, OCC, MB, IPR, OPR, OV, BC, LR | 1161 |
| ClifBar | book | SV, OCC, MB, FM, IPR, OV, BC | 472 |
| Coupon | coupon | OCC, BC | 327 |
| Crowds | human | IV, DEF, BC | 347 |
| Car2 | car | IV, SV, MB, FM, BC | 913 |
| Car1 | car | IV, SV, MB, FM, BC, LR | 1020 |
| Human3 | human | SV, OCC, DEF, OPR, BC | 1698 |
| Car24 | car | IV, SV, BC | 3059 |
| Challenge | BC | FM | MB | DEF | IV | IPR | LR | OCC | OPR | OV | SV | Total |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NEUTMS | 0.374 | 0.409 | 0.408 | 0.444 | 0.306 | 0.365 | 0.235 | 0.413 | 0.422 | 0.380 | 0.340 | 0.404 |
| ASMS | 0.358 | 0.436 | 0.406 | 0.399 | 0.338 | 0.346 | 0.271 | 0.387 | 0.393 | 0.413 | 0.390 | 0.382 |
| KMS | 0.284 | 0.325 | 0.322 | 0.302 | 0.292 | 0.277 | 0.185 | 0.315 | 0.315 | 0.369 | 0.290 | 0.306 |
| SMS | 0.180 | 0.255 | 0.222 | 0.219 | 0.193 | 0.184 | 0.131 | 0.251 | 0.235 | 0.274 | 0.242 | 0.220 |
| Challenge | BC | FM | MB | DEF | IV | IPR | LR | OCC | OPR | OV | SV | Total |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NEUTMS | 0.395 | 0.422 | 0.418 | 0.480 | 0.361 | 0.402 | 0.252 | 0.432 | 0.442 | 0.392 | 0.366 | 0.432 |
| ASMS | 0.389 | 0.442 | 0.434 | 0.453 | 0.392 | 0.401 | 0.271 | 0.416 | 0.437 | 0.418 | 0.387 | 0.421 |
| KMS | 0.328 | 0.346 | 0.342 | 0.371 | 0.328 | 0.334 | 0.237 | 0.361 | 0.363 | 0.357 | 0.320 | 0.354 |
| SMS | 0.209 | 0.274 | 0.243 | 0.277 | 0.224 | 0.220 | 0.153 | 0.281 | 0.268 | 0.258 | 0.247 | 0.249 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, K.; Fan, E.; Ye, J.; Fan, C.; Shen, S.; Gu, Y. Neutrosophic Similarity Score Based Weighted Histogram for Robust Mean-Shift Tracking. Information 2017, 8, 122. https://doi.org/10.3390/info8040122
Hu K, Fan E, Ye J, Fan C, Shen S, Gu Y. Neutrosophic Similarity Score Based Weighted Histogram for Robust Mean-Shift Tracking. Information. 2017; 8(4):122. https://doi.org/10.3390/info8040122
Chicago/Turabian StyleHu, Keli, En Fan, Jun Ye, Changxing Fan, Shigen Shen, and Yuzhang Gu. 2017. "Neutrosophic Similarity Score Based Weighted Histogram for Robust Mean-Shift Tracking" Information 8, no. 4: 122. https://doi.org/10.3390/info8040122
APA StyleHu, K., Fan, E., Ye, J., Fan, C., Shen, S., & Gu, Y. (2017). Neutrosophic Similarity Score Based Weighted Histogram for Robust Mean-Shift Tracking. Information, 8(4), 122. https://doi.org/10.3390/info8040122