Planning of Vehicle Routing with Backup Provisioning Using Wireless Sensor Technologies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Critical stops are stops where there is a high probability of overcrowding occurrences. Based on the load information collected and stored at the monitoring platform, a manager may classify a stop as critical or not. Such an evaluation may change after some months. That is, planned routes remain unchanged for a long period until the manager decides to re-plan them, which should happen if stops considered to be critical have changed.
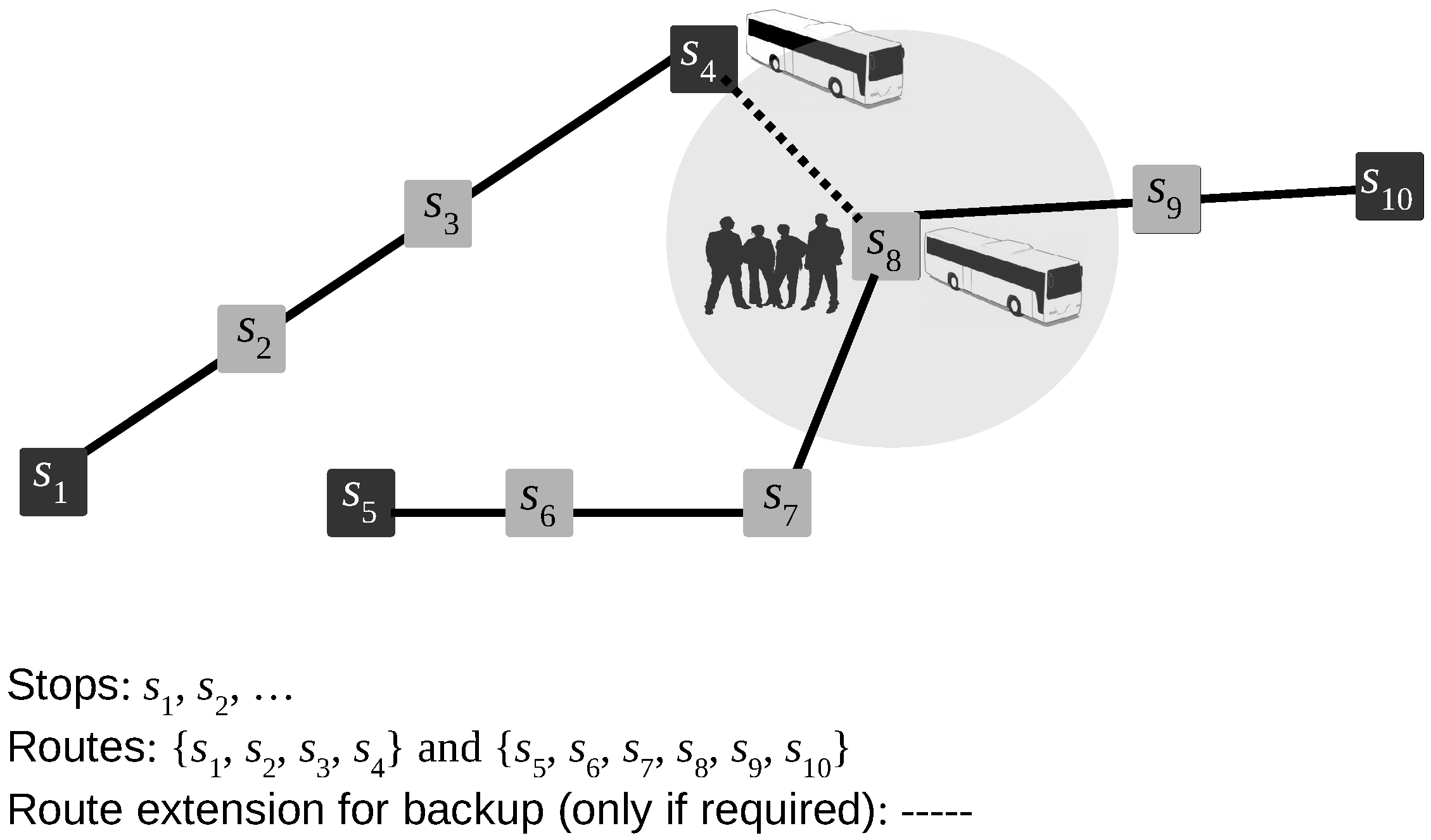
- Backup is provided only if necessary. That is, the fact that vehicle loads change along the day is naturally addressed since backup is activated only in the case of overcrowding. Otherwise, backup is not provided.
- Schedules are not included in route planning because the problem would become too complex to solve, requiring much extra information (e.g., number of vehicles, drivers and their availability, company serving period, etc.). However, schedules can be easily applied after route planning. The only requirement is that the expected time of arrival of vehicle , to its final destination, must be approximately equal to the arrival of vehicle , to the critical stop, for to be able to provide backup to (multiple similar schedules throughout the day can be defined). If is overcrowded, can go to the critical station because it has finished its route. If no overcrowding is detected, then backup is not required, although routes were prepared for that purpose.
2. State of the Art
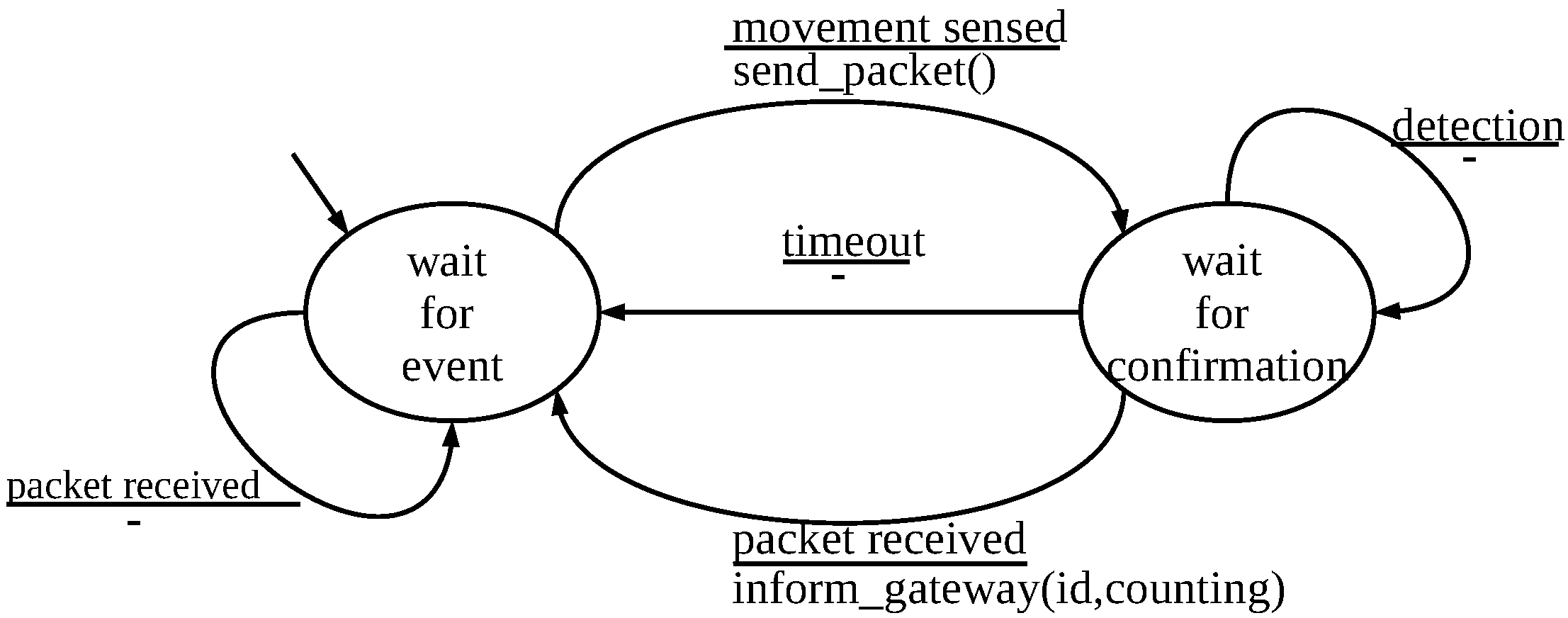
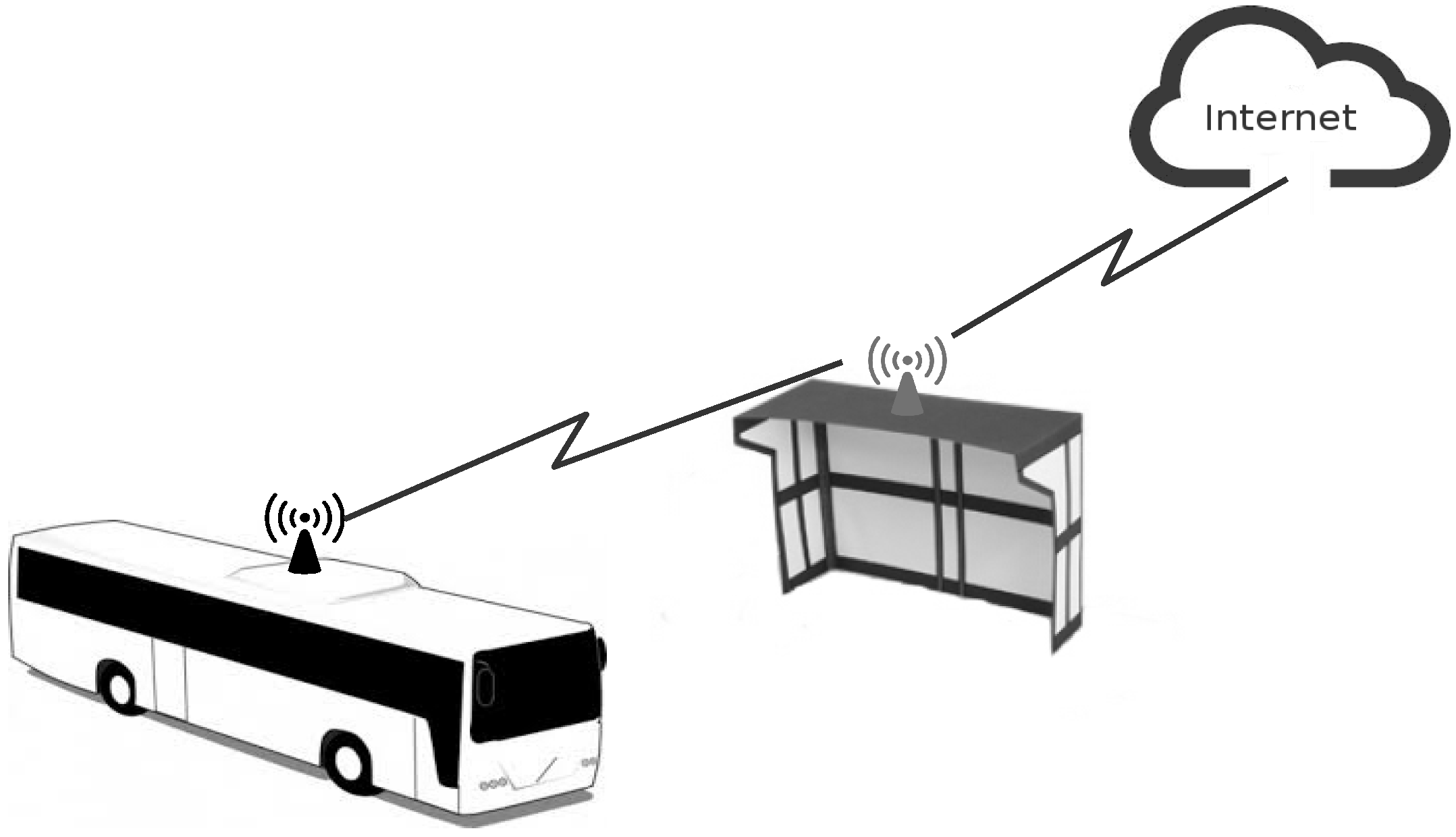
3. Wireless Sensor Infrastructure and Data Collection
3.1. The Infrastructure
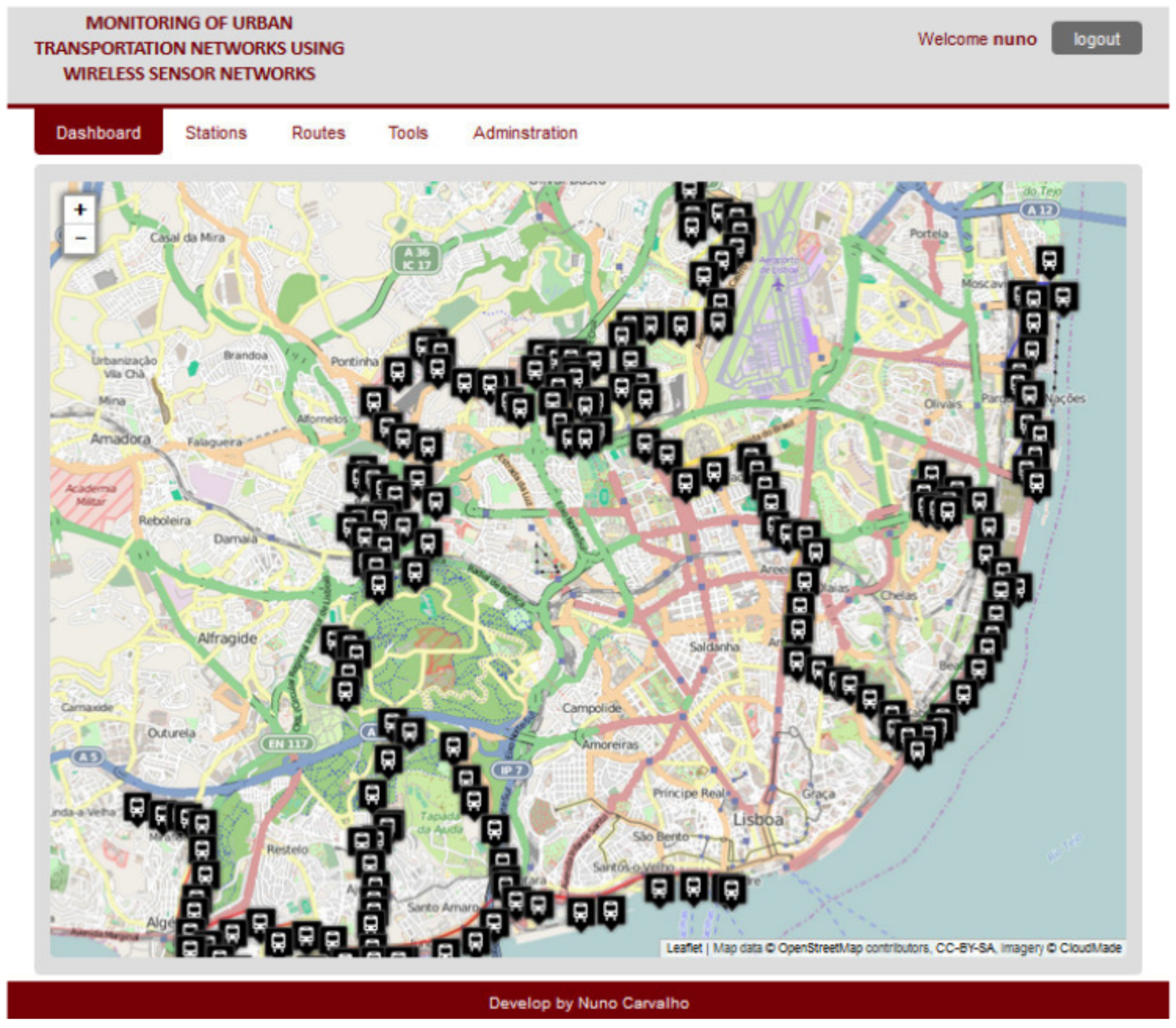
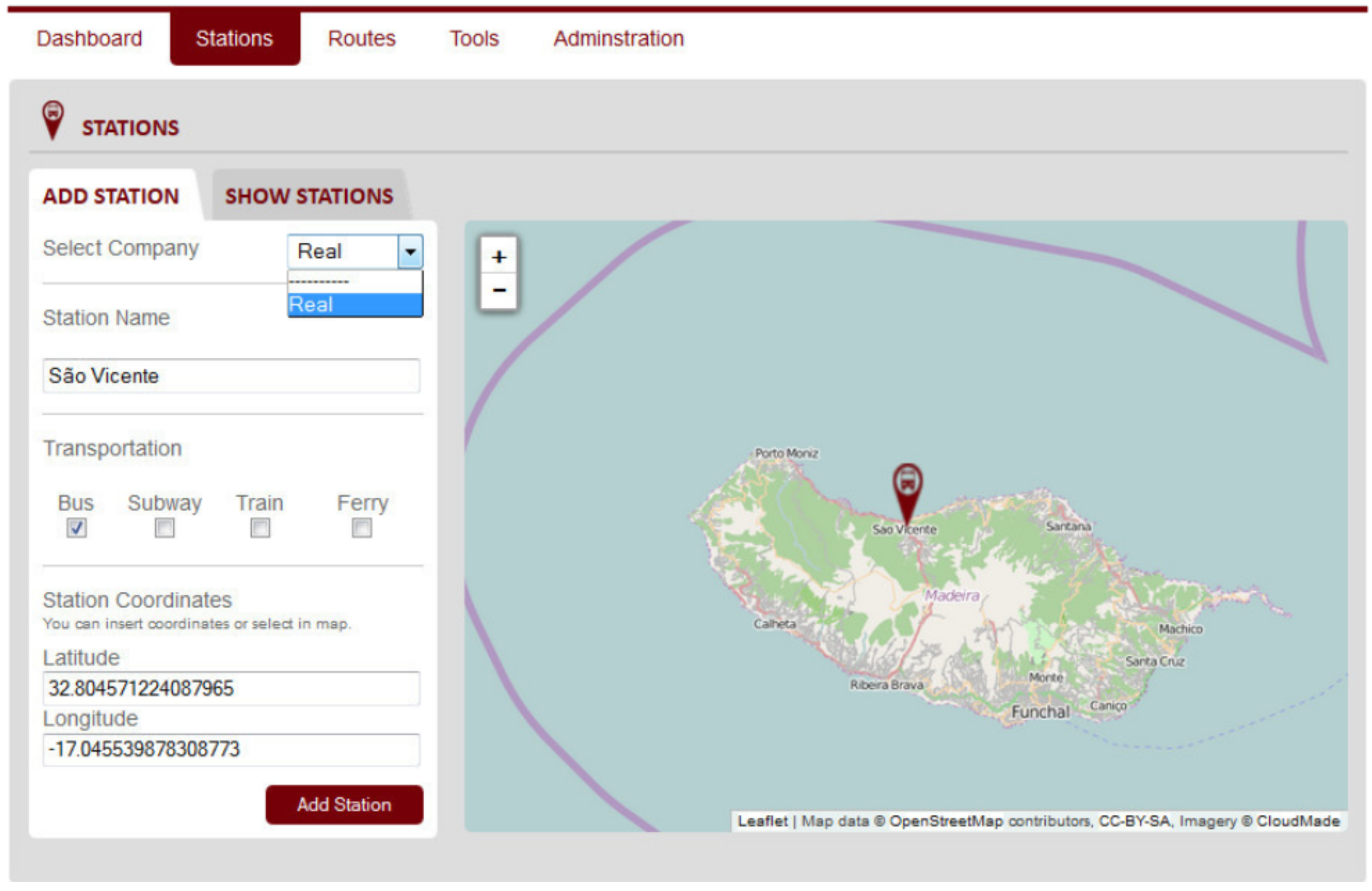
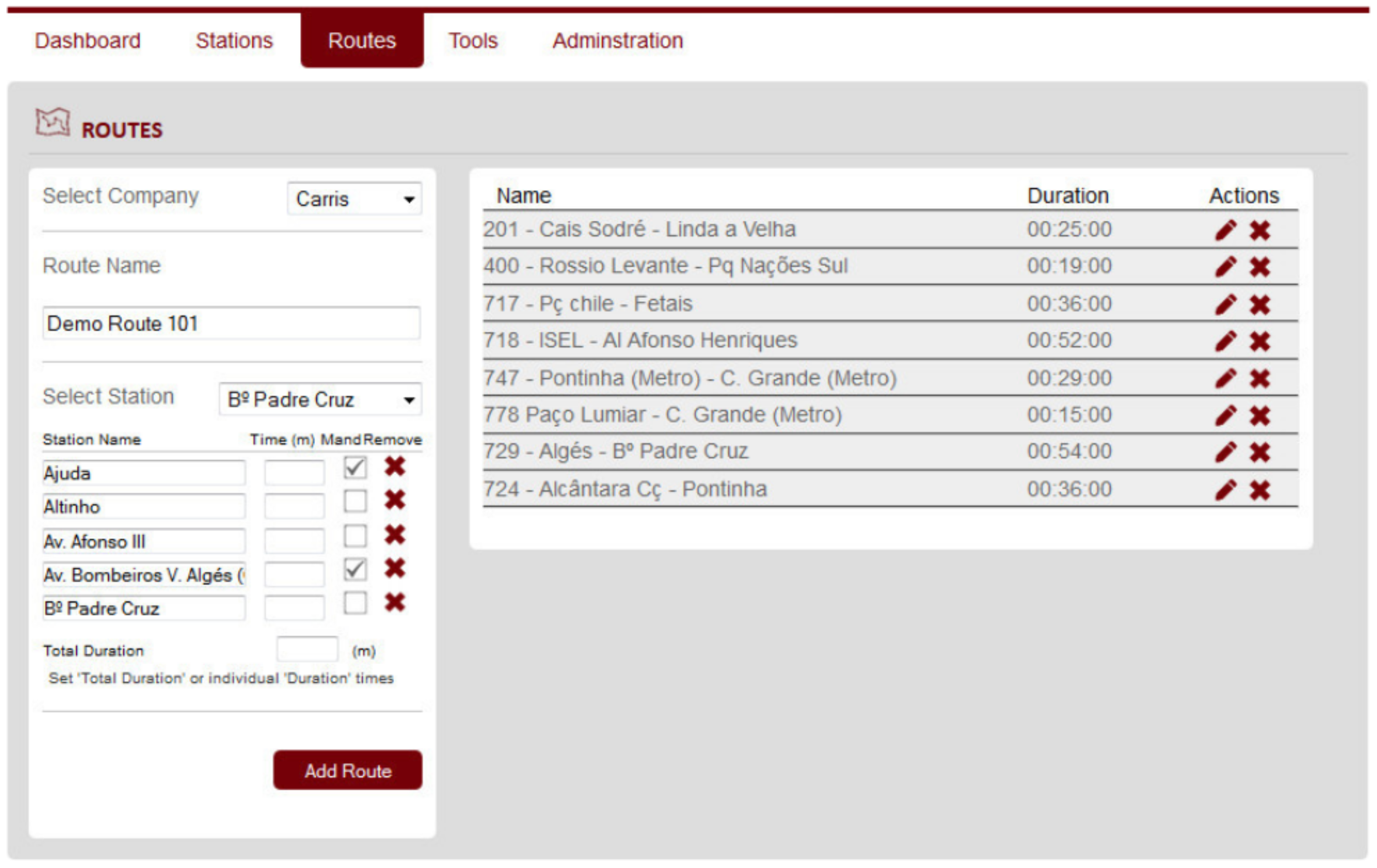
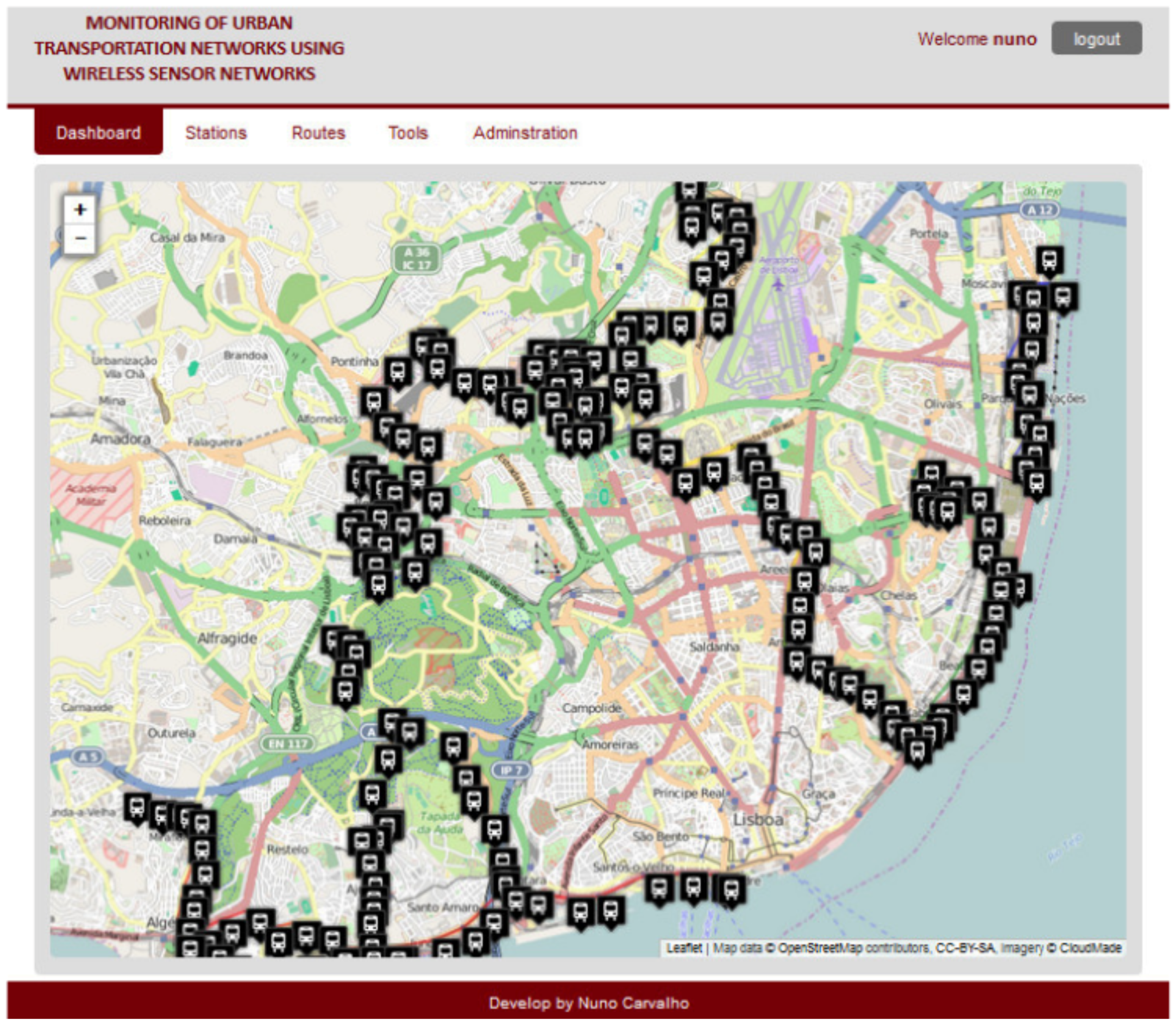
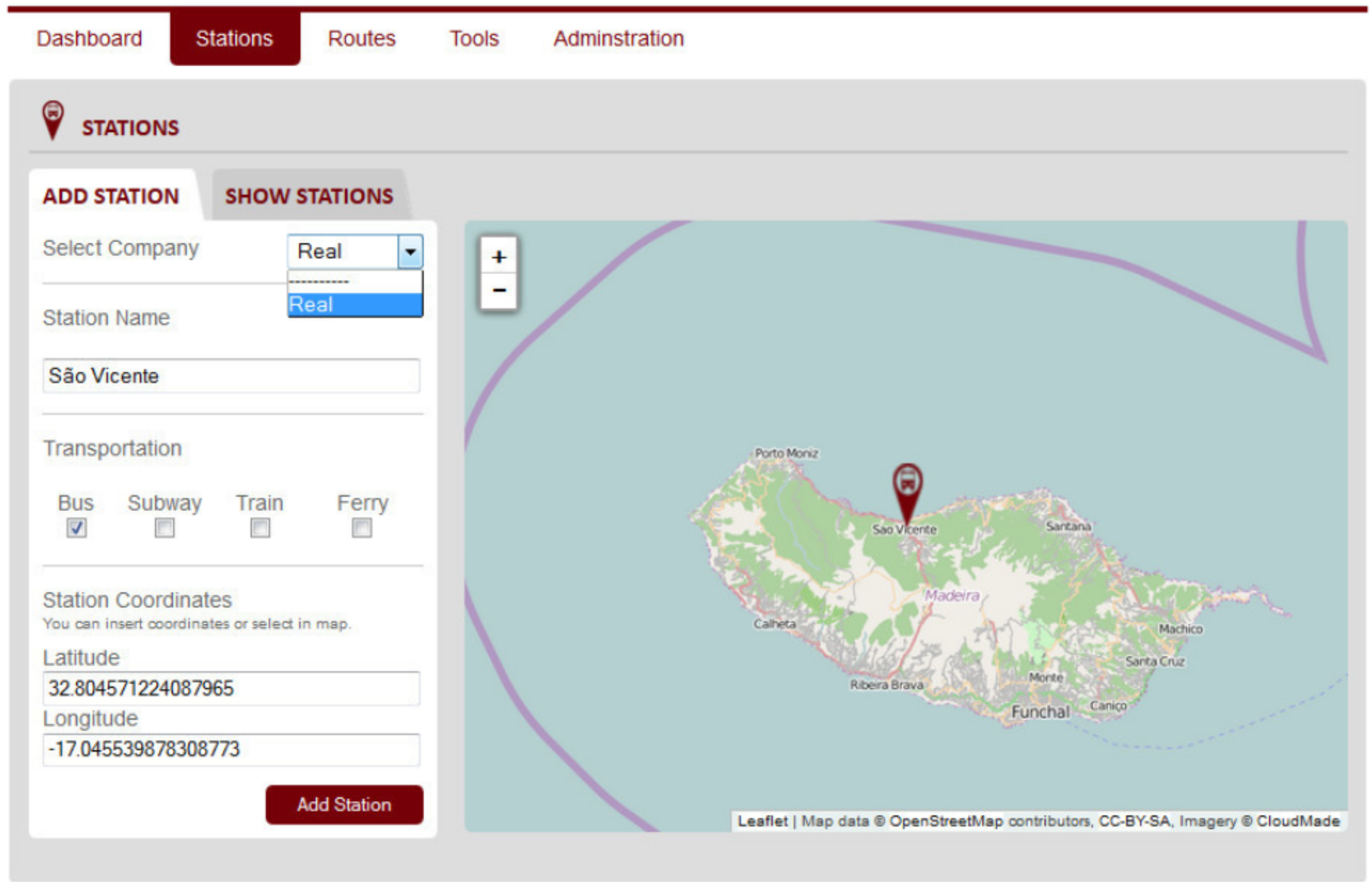
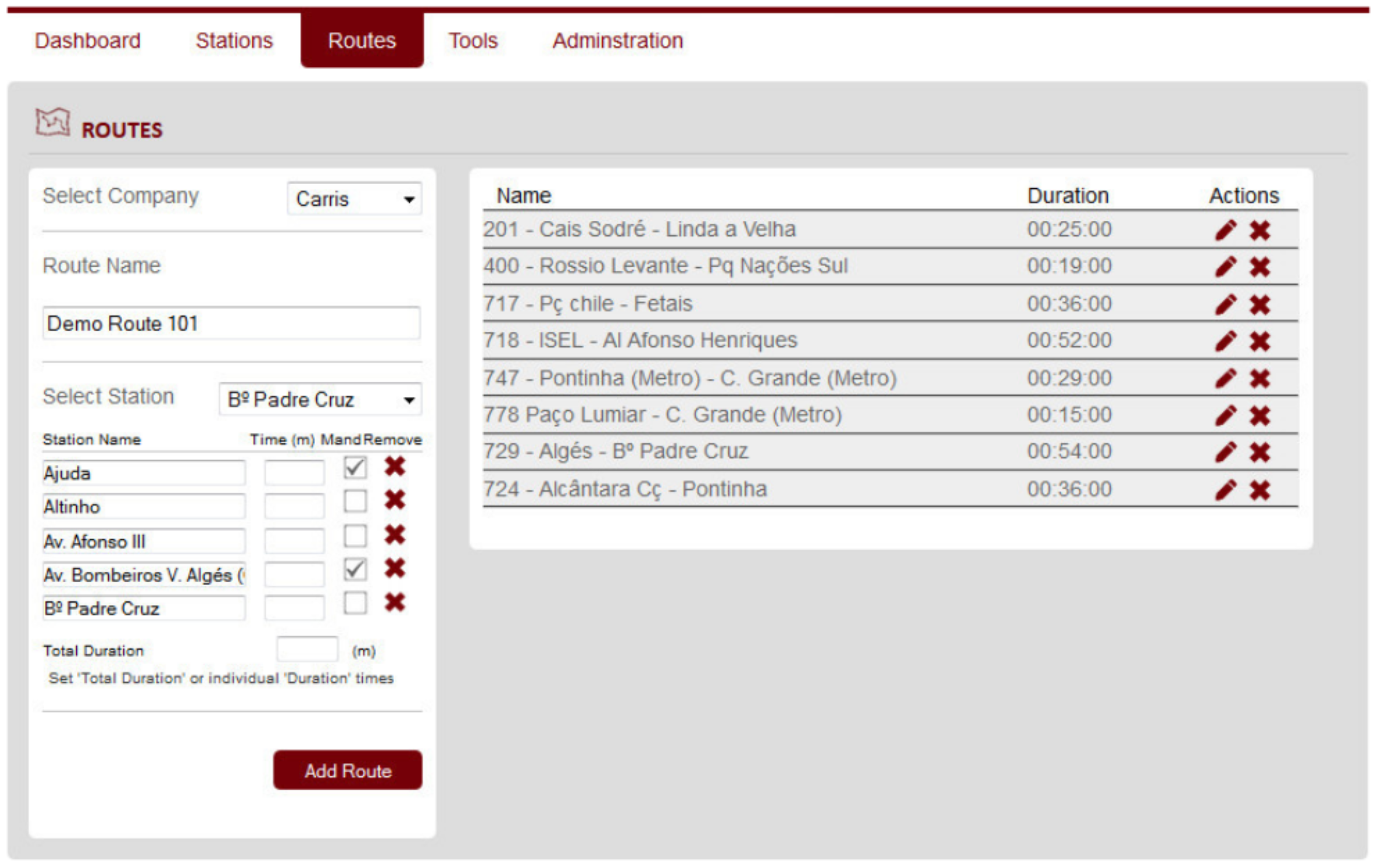
3.2. The Monitoring Tool
4. Problem Statement
4.1. Notation and Definitions
4.2. Problem Definition
4.3. Problem Mathematical Formalization
| One if route selects stop to become its final destination, , zero otherwise. | |
| One if route includes going directly from stop to , zero otherwise. | |
| When ensuring that the time window associated with mandatory stop s, with time window info , of route r is not violated, this will be the time value at . Note that to control if a time window is not violated, is first stored in , will be decreased at nodes traversed and cannot be negative when reaching destination s. |
5. Heuristic Approach
- Building route framework: Here, the concern is to build the basis framework for route construction, where all stops are visited only once while not violating time window constraints.
- Extension for backup inclusion: After the basis framework, routes are extended for backup provisioning to be ensured.
- Applying local search procedures: Inter- and intra-route exchanges of non-mandatory stops are applied for the improvement of the solution.
5.1. Building Route Framework
| Neighborhood for the pair of consecutive mandatory stops and of route . Used to evaluate the possibility of inserting a stop between and . | |
| Cost of inserting a specific stop between the pair of stops and of route . Used when building neighborhoods. | |
| Specific subset of all of the neighborhoods. |
| List of stops for each route . | |
| Destination stop for each route . |
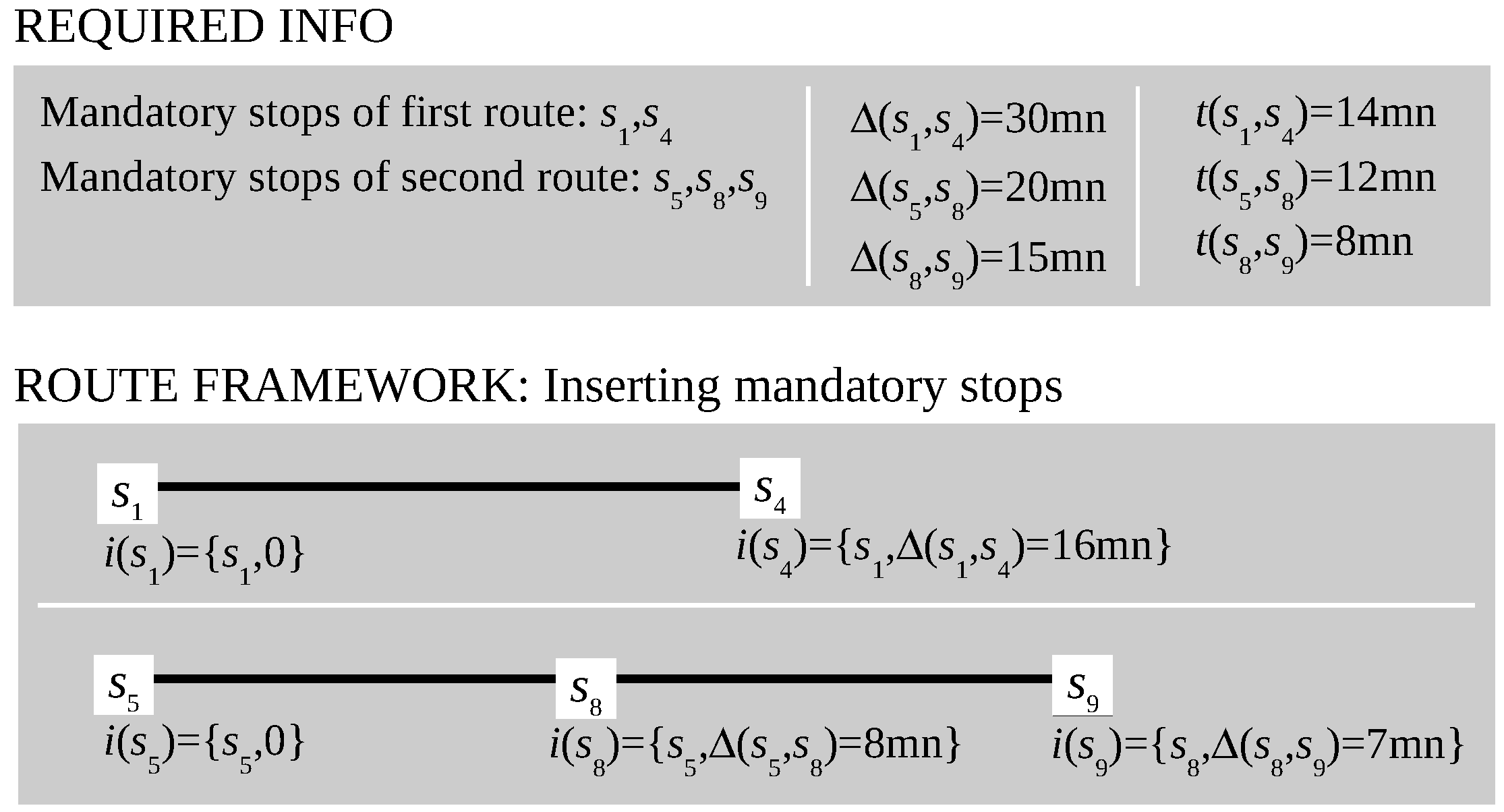
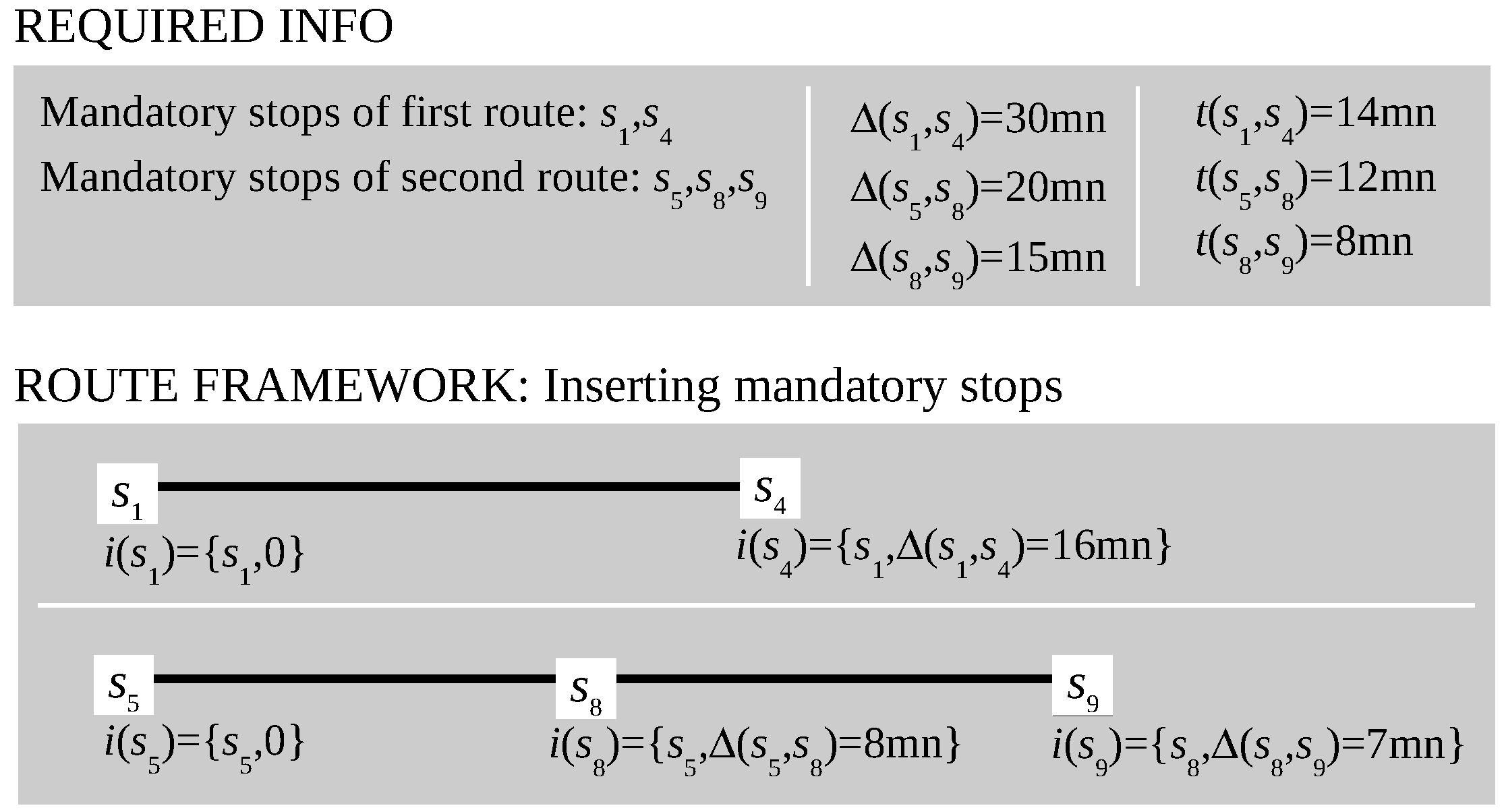
5.1.1. Inserting Mandatory Stops
| Algorithm 1: Procedure for the insertion of mandatory stops. |
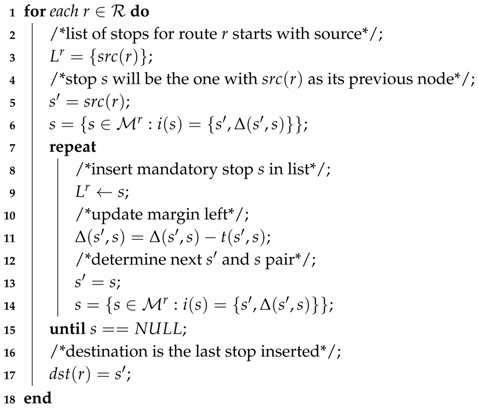 |
5.1.2. Inserting Non-Mandatory Stops
| Algorithm 2: Procedure for neighborhood formation. |
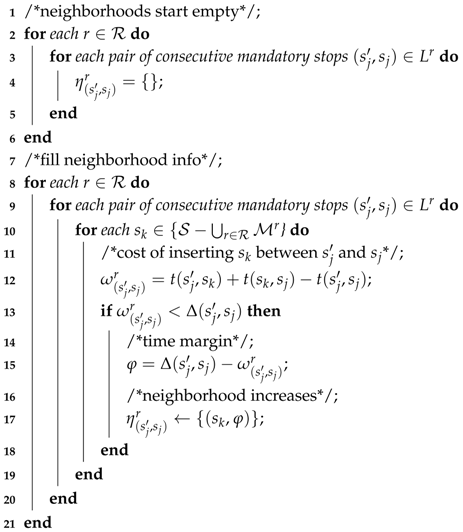 |
| Algorithm 3: Procedure for the insertion of stops using neighborhood info. |
 |
| Algorithm 4: Procedure for the insertion of the remaining stops. |
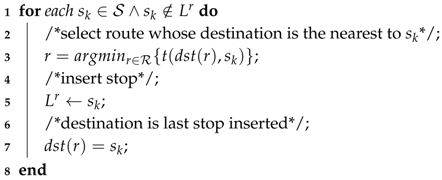 |
5.2. Extension for Backup Inclusion
| Time it takes for backup to arrive at . | |
| List of stops resulting from a shortest path calculation. |
| Backup for stop . | |
| Final list of stops for every route , after extending. | |
| Final destinations for every route , after extending. |
| Algorithm 5: Procedure to extend the route framework and incorporate backup provisioning. |
 |
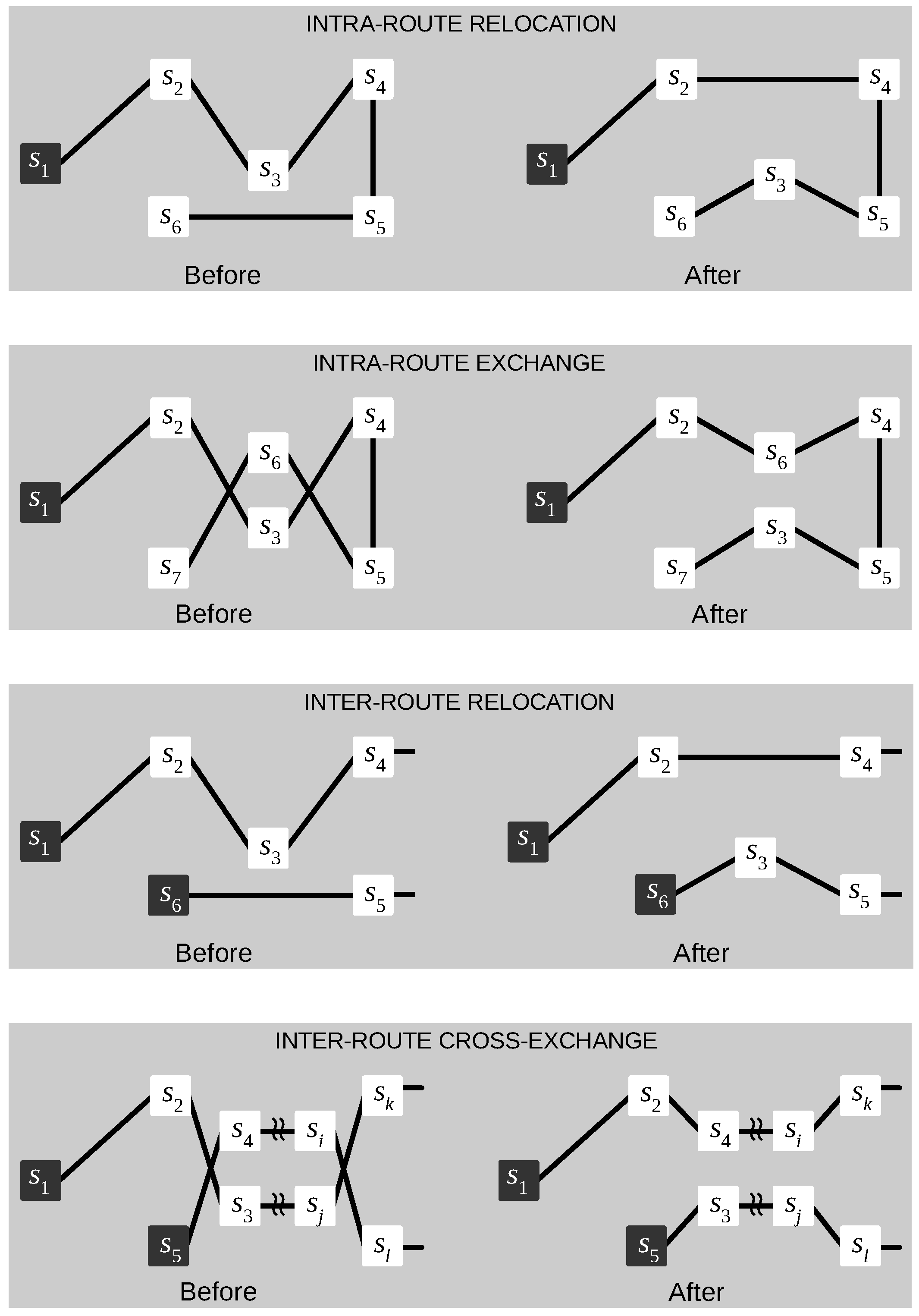
5.3. Applying Local Search Procedures
5.3.1. Intra-Route Relocation
5.3.2. Intra-Route Exchange
5.3.3. Inter-Route Relocation
5.3.4. Inter-Route Cross-Exchange
6. Performance Analysis
6.1. Assumptions
- To define the total number of routes in , the solutions provided by the best known heuristic results were used. In such solutions, if m vehicles leave a specific depot, then m routes starting at that depot will be included in . This choice is based on the fact that such best known solutions provide good upper bounds on the number of routes required to cover all stops. Therefore, it is not necessary to consider all vehicles available per depot (info provided by MDVRP instances).
- Considering a specific depot and the m routes starting at , determined as stated previously, the mandatory stops of these routes will include and the m stops farther away from , one for each route. That is, each route has two mandatory stops, the depot and one of the m stops.
- Due to the way mandatory stops have been defined, a reasonable time window for a mandatory stop s at route r will be:where is the total duration of route r, provided by the best known results, and is the service time at stop . That is, the average total service time per route is removed from the total duration of the route, since service time is not relevant for our VRwBP problem. This result must be divided by two because the total duration of routes includes returning to the depot, and this must not be considered when defining the time windows of mandatory stops.
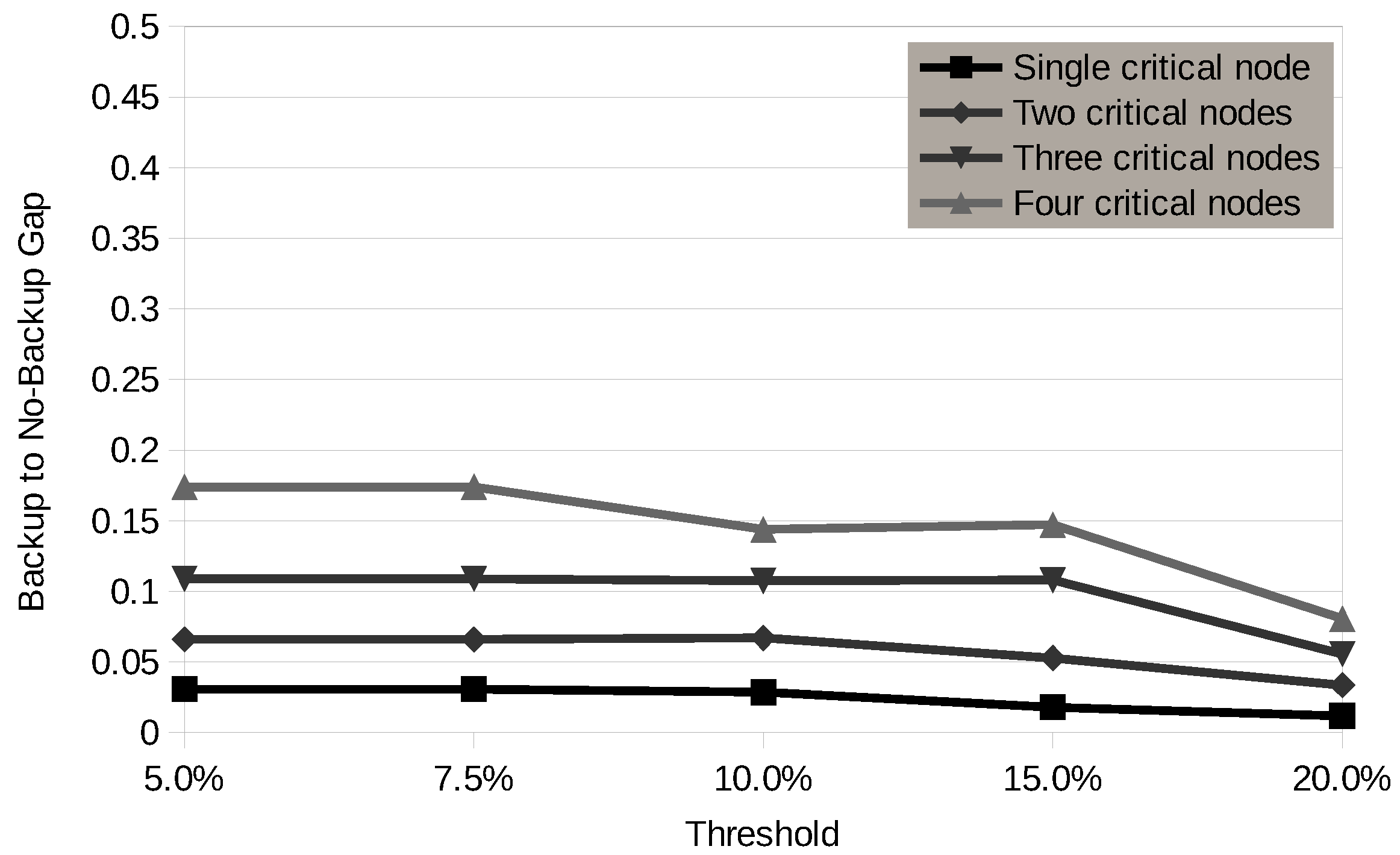
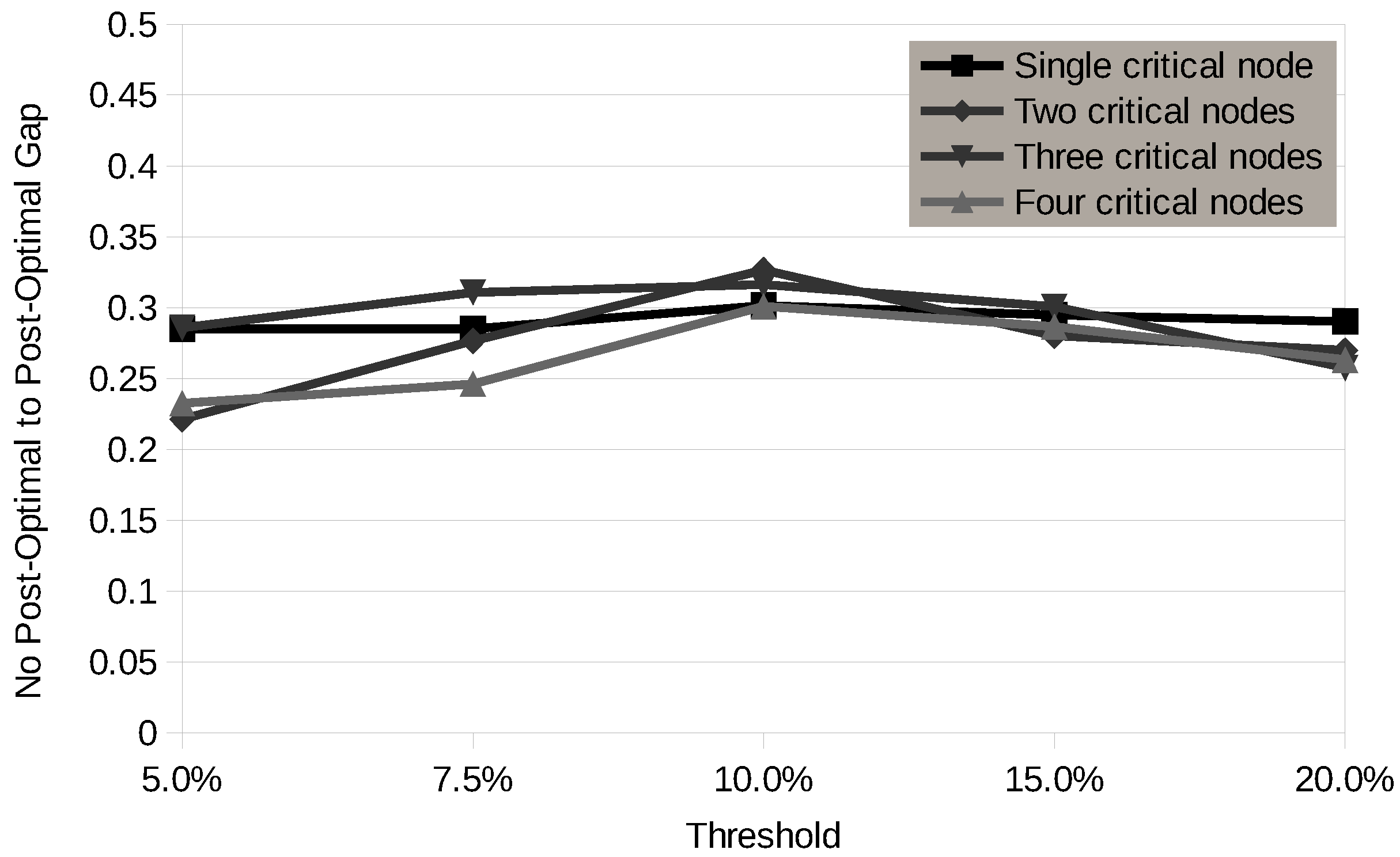
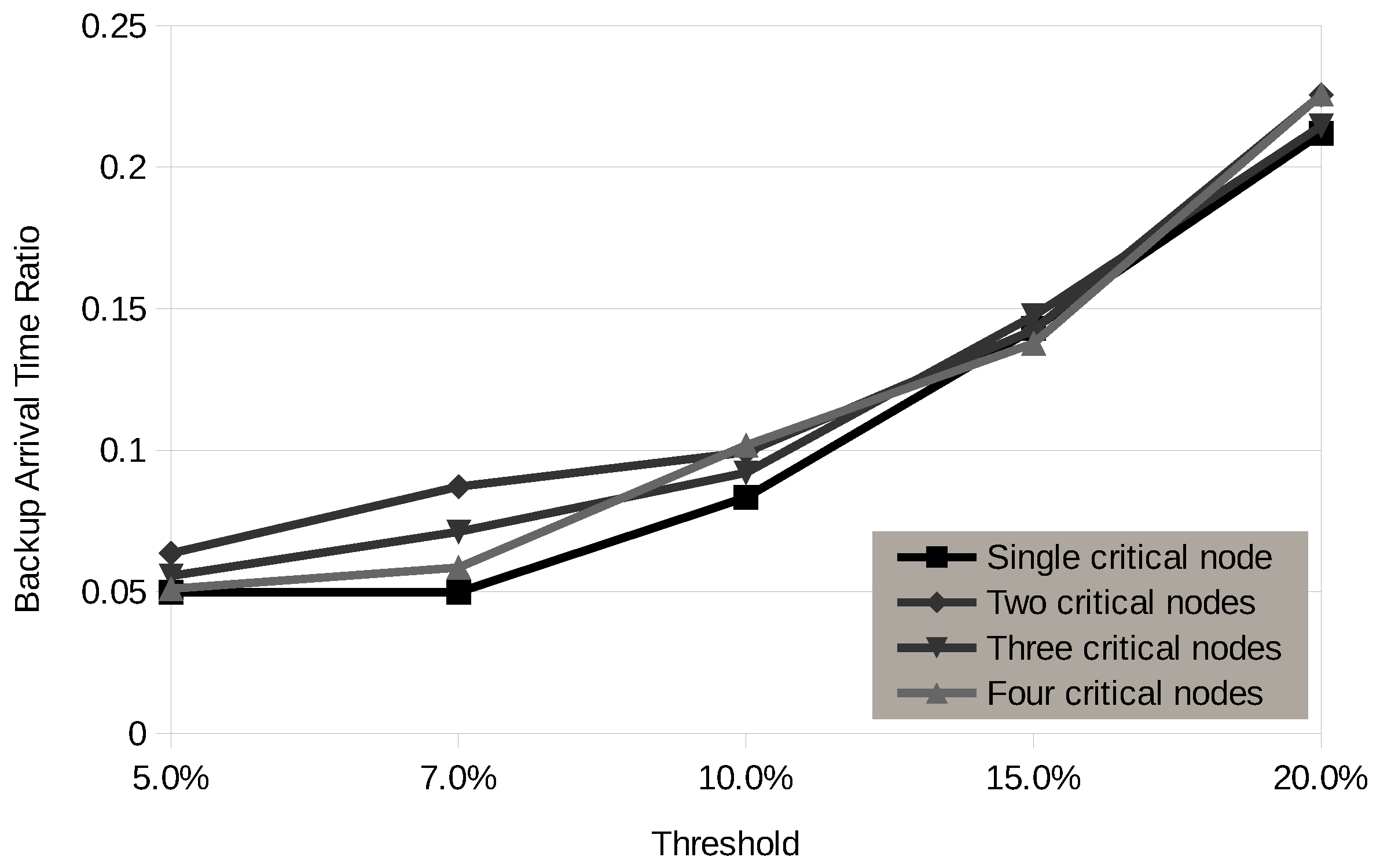
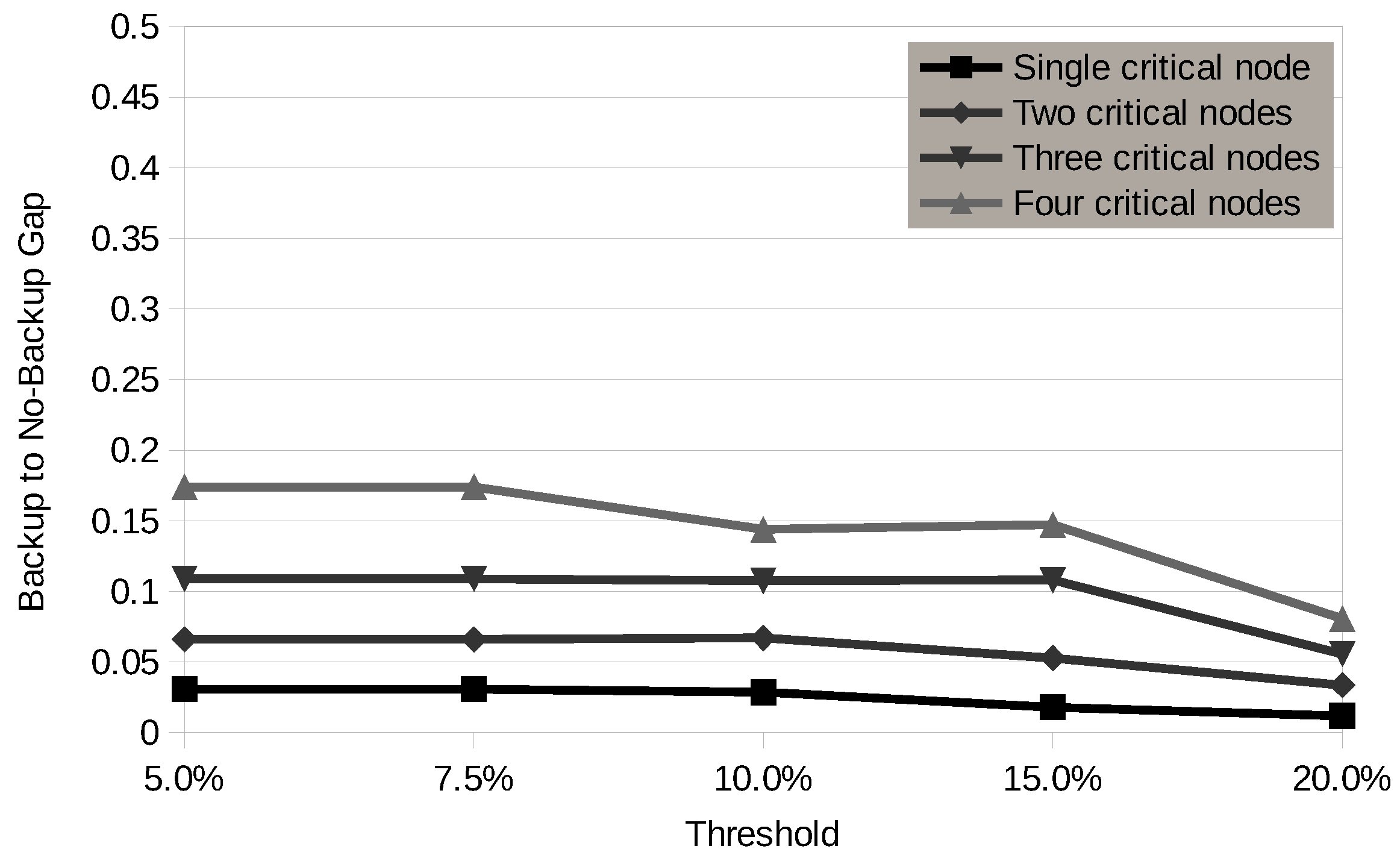
- Critical stops are the ones having more demand. More specifically, tests were done with including a single critical stop (the one with highest demand value), two critical stops, and so on, until a maximum of critical stops, assuming that no two stops belong to the same route of the best known results.
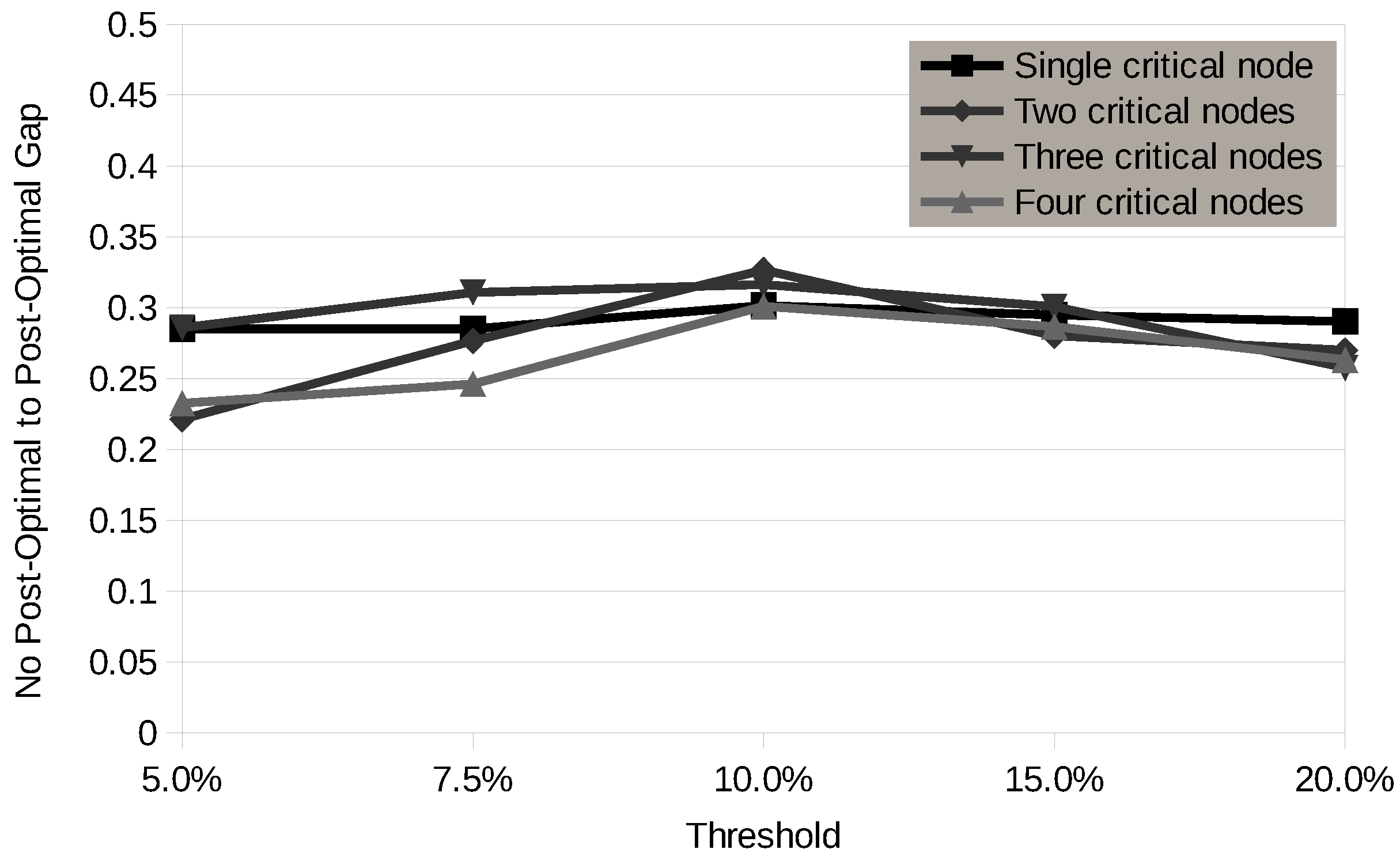
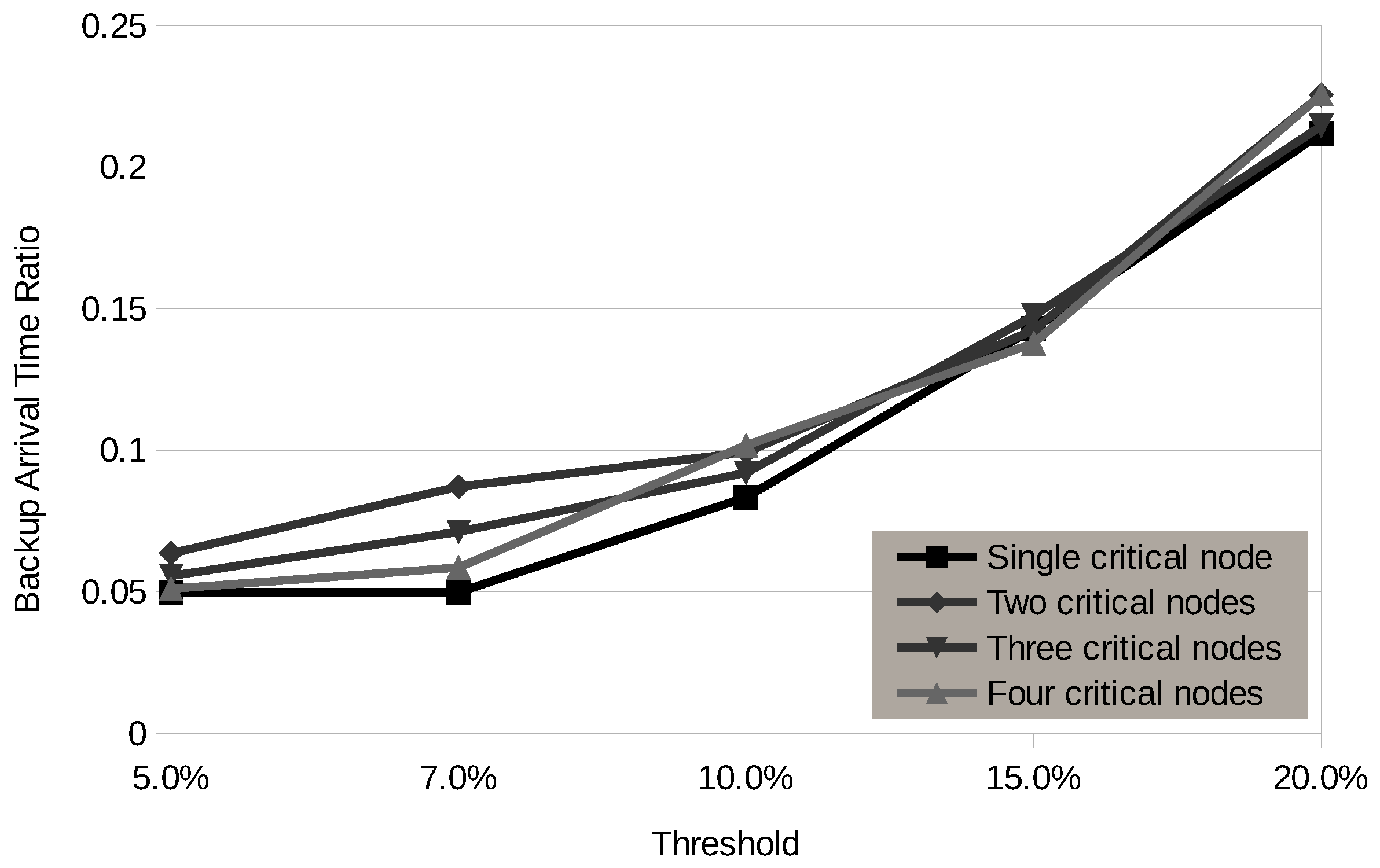
- The threshold of a critical node , denoted by , will be a percentage of ’s route duration, i.e., route of the best known results where is inserted. Thus, , . Different percentage values will be tested.
6.2. Impact Analysis of Backup Provisioning and Local Search Procedures
6.3. Quality of Heuristic Solutions
6.4. Overall Perception
- Backup provisioning allows fast response to overload and reduces waiting times for customers;
- Extension of routes to incorporate a backup can be done while serving stops with more needs;
- Backup provisioning avoids more schedules/vehicles/drivers, reducing costs;
- The extra traversal by a vehicle providing backup is only done in case of need, namely when sensors detect overcrowding in a critical stop. This is a flexible and cost-effective solution for transportation network enhancement.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless Sensor Network Survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Zheng, J.; Jamalipour, A. Wireless Sensor Networks, a Networking Perspective, 1st ed.; Wiley-IEEE Press: New York, NY, USA, 2009. [Google Scholar]
- Härri, J.; Filali, F.; Bonnet, C. Mobility Models for Vehicular Ad Hoc Networks. IEEE Commun. Surv. Tutor. 2009, 11, 19–41. [Google Scholar] [CrossRef]
- Zhang, G.; Xu, Y.; Wang, X.; Tian, X.; Liu, J.; Gan, X.; Yu, H.; Qian, L. Multicast Capacity for VANETs with Directional Antenna and Delay Constraint. IEEE J. Select. Areas Commun. 2012, 30, 818–833. [Google Scholar] [CrossRef]
- Restuccia, F.; Das, S.K. Optimizing the Lifetime of Sensor Networks with Uncontrollable Mobile Sinks and QoS Constraints. ACM Trans. Sens. Netw. 2016, 12, 2. [Google Scholar] [CrossRef]
- Carvalho, N.; Schütz, G.; Correia, N. Vehicle Routing with Backup Provisioning Using Wireless Sensor Infrastructure. In Proceedings of the IEEE International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 647–652. [Google Scholar]
- Yeun, L.C.; Ismail, W.R.; Omar, K.; Zirour, M. Vehicle Routing Problem: Models and Solutions. J. Q. Meas. Anal. 2008, 4, 205–218. [Google Scholar]
- Cordeau, J.F.; Laporte, G. The Dial-a-Ride Problem: Models and Algorithms. Ann. Oper. Res. 2007, 153, 29–46. [Google Scholar] [CrossRef]
- Li, F.; Golden, B.; Wasil, E. The Open Vehicle Routing Problem: Algorithms, Large-Scale Test Problems, and Computational Results. Comput. Oper. Res. 2007, 34, 2918–2930. [Google Scholar] [CrossRef]
- López-Sánchez, A.; Hernández-Díaz, A.; Vigo, D.; Caballero, R.; Molina, J. A multi-start algorithm for a balanced real-world Open Vehicle Routing Problem. Eur. J. Oper. Res. 2014, 238, 104–113. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 3rd ed.; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Marinakis, Y.; Marinaki, M. A Bumble Bees Mating Optimization algorithm for the Open Vehicle Routing Problem. Swarm Evol. Comput. 2014, 15, 80–94. [Google Scholar] [CrossRef]
- Liu, J.; Fang, Y. Urban Traffic Control System Based on Wireless Sensor Networks. In Proceedings of the IEEE International Conference on Information Acquisition, Weihai, China, 20–23 August 2006; pp. 295–300. [Google Scholar]
- Wu, Z.; Chu, H.; Pan, Y.; Yang, X. Bus Priority Control System Based on Wireless Sensor Network (WSN) and Zigbee. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, 13–15 December 2006; pp. 148–151. [Google Scholar]
- Cai, C.Q.; Zhang, Z.; Ji, S.D. The Intelligent Bus Scheduling Based on Zigbee. In Proceedings of the 7th International Conference on Computer Science Education, Melbourne, Australia, 14–17 July 2012; pp. 1002–1005. [Google Scholar]
- Pun-Cheng, L.S.C. An Interactive Web-Based Public Transport Enquiry System With Real-Time Optimal Route Computation. IEEE Trans. Intell. Transp. Syst. 2012, 13, 983–988. [Google Scholar] [CrossRef]
- Zhou, Y.; Lee, G.M. A Lagrangian Relaxation-Based Solution Method for a Green Vehicle Routing Problem to Minimize Greenhouse Gas Emissions. Sustainability 2017, 9, 776. [Google Scholar] [CrossRef]
- Qin, J.; Ye, Y.; Rong Cheng, B.; Zhao, X.; Ni, L. The Emergency Vehicle Routing Problem with Uncertain Demand under Sustainability Environments. Sustainability 2017, 9, 288. [Google Scholar] [CrossRef]
- Lavanya, G.; Preethy, W.; Shameem, A.; Sushmitha, R. Passenger Bus Alert System for Easy Navigation of Blind. In Proceedings of the IEEE International Conference on Circuits, Power and Computing Technologies, Nagercoil, India, 20–21 March 2013; pp. 798–802. [Google Scholar]
- Zhou, L.; Feng, L.; Gupta, A.; Ong, Y.S.; K. Liu, C.C.; Sha, E.; Yang, B.; Yan, B.W. Solving Dynamic Vehicle Routing Problem Via Evolutionary Search with Learning Capability. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), San Sebastián, Spain, 5–8 June 2017; pp. 890–896. [Google Scholar]
- Gutierrez, V.; Izaguirre, M.; Perez, J.; Munoz, L.; Lopez, D.; Sanchez, M. Ambient Intelligence in Intermodal Transport Services: A Practical Implementation in Road Logistics. In Proceedings of the 4th International Conference on Sensor Technologies and Applications (SENSORCOMM), Venice, Italy, 18–25 July 2010; pp. 203–209. [Google Scholar]
- Wang, Y.; Ho, O.; Huang, G.; Li, D.; Huang, H. Study on RFID-Enabled Real-Time Vehicle Management System in Logistics. In Proceedings of the International Conference on Automation and Logistics, Qingdao, China, 1–3 September 2008; pp. 2234–2238. [Google Scholar]
- Wang, Y.; Ho, O.K.; Huang, G.Q.; Li, D. Study on Vehicle Management in Logistics Based on RFID, GPS and GIS. Int. J. Internet Manuf. Serv. 2008, 1, 294–304. [Google Scholar] [CrossRef]
- Carić, T.; Galić, A.; Fosin, J.; Gold, H.; Reinholz, A. A Modelling and Optimization Framework for Real-World Vehicle Routing Problems; InTechOpen: Rijeka, Croatia, 2008. [Google Scholar]
- Networking and Emerging Optimization Research Group. Available online: http://neo.lcc.uma.es/vrp/vrp-instances/multiple-depot-vrp-instances/ (accessed on 26 November 2015).
- Liu, R.; Jiang, Z.; Geng, N. A Hybrid Genetic Algorithm for the Multi-Depot Open Vehicle Routing Problem. OR Spectr. 2014, 36, 401–421. [Google Scholar] [CrossRef]

© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Correia, N.; Carvalho, N.; Schütz, G. Planning of Vehicle Routing with Backup Provisioning Using Wireless Sensor Technologies. Information 2017, 8, 94. https://doi.org/10.3390/info8030094
Correia N, Carvalho N, Schütz G. Planning of Vehicle Routing with Backup Provisioning Using Wireless Sensor Technologies. Information. 2017; 8(3):94. https://doi.org/10.3390/info8030094
Chicago/Turabian StyleCorreia, Noélia, Nuno Carvalho, and Gabriela Schütz. 2017. "Planning of Vehicle Routing with Backup Provisioning Using Wireless Sensor Technologies" Information 8, no. 3: 94. https://doi.org/10.3390/info8030094
APA StyleCorreia, N., Carvalho, N., & Schütz, G. (2017). Planning of Vehicle Routing with Backup Provisioning Using Wireless Sensor Technologies. Information, 8(3), 94. https://doi.org/10.3390/info8030094