Performance Evaluation of an Indoor Positioning Scheme Using Infrared Motion Sensors

Abstract
:1. Introduction
2. Related Works
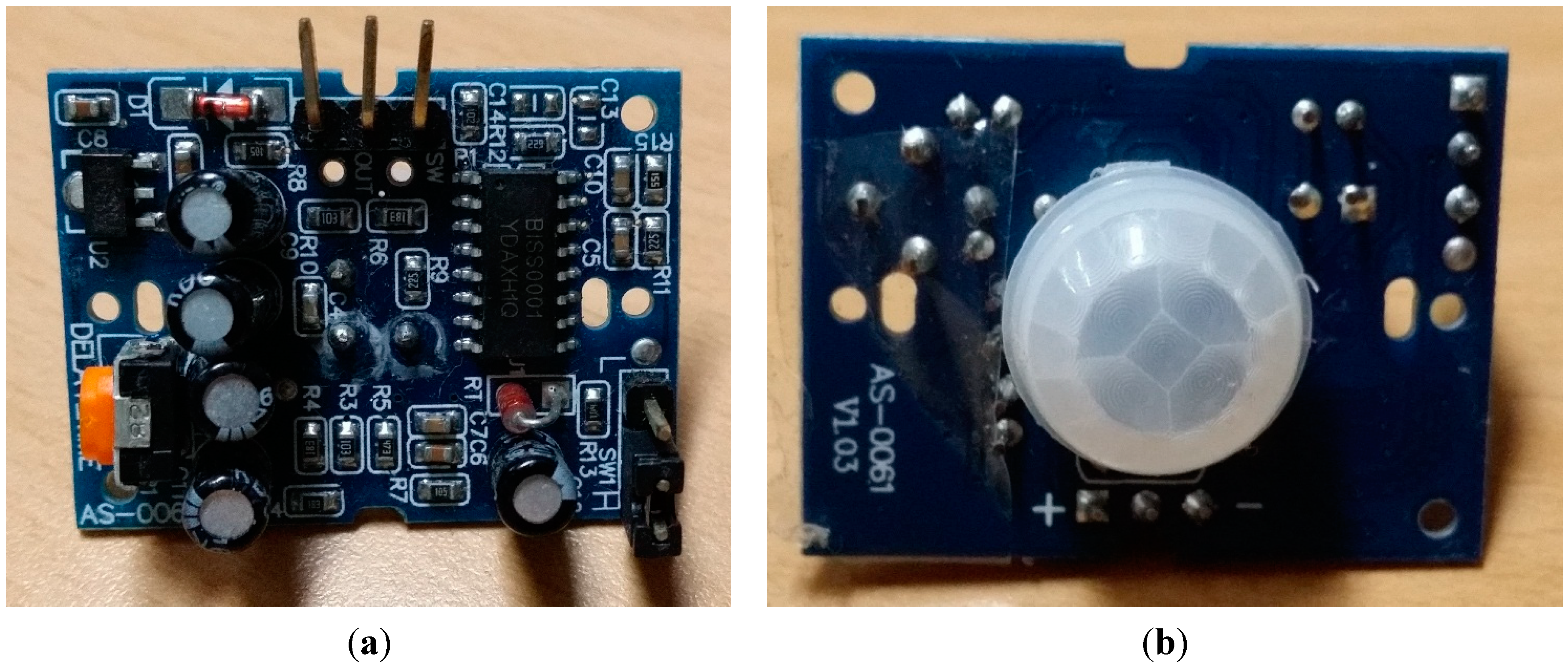
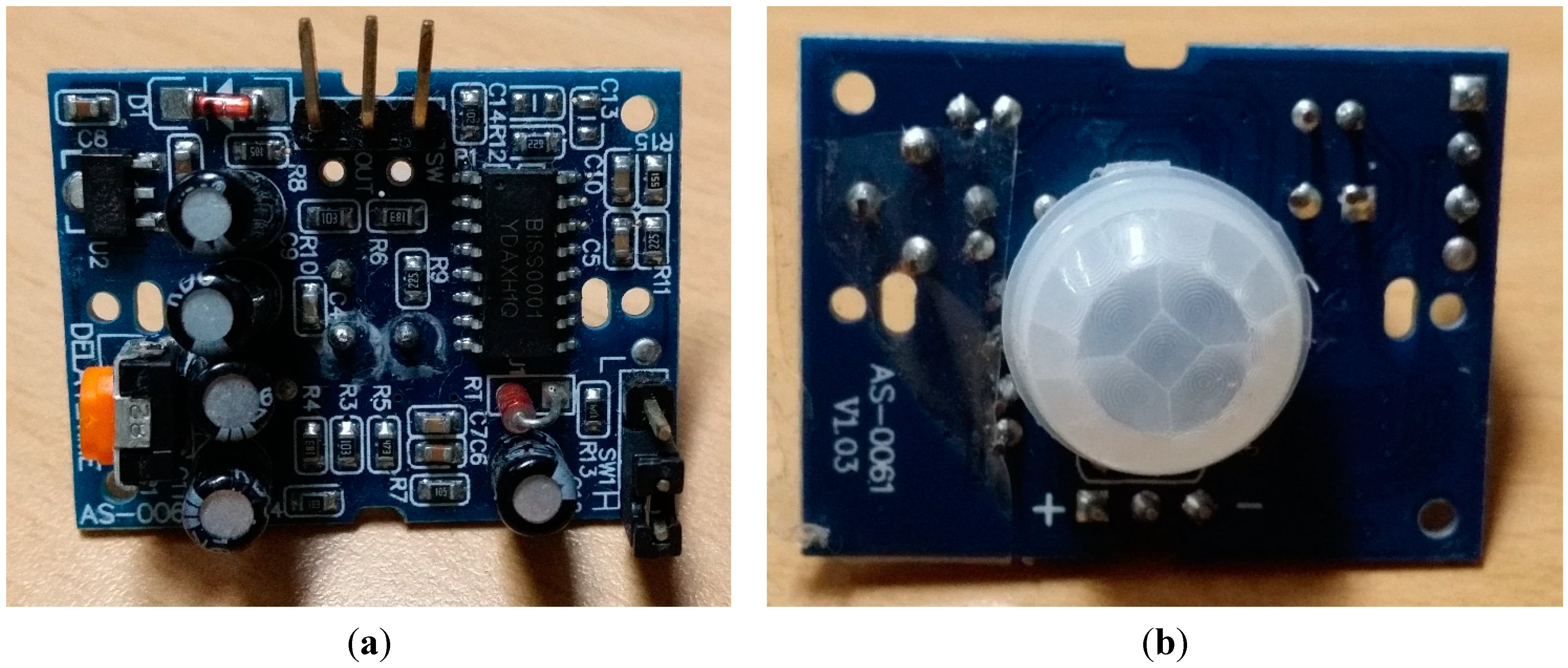
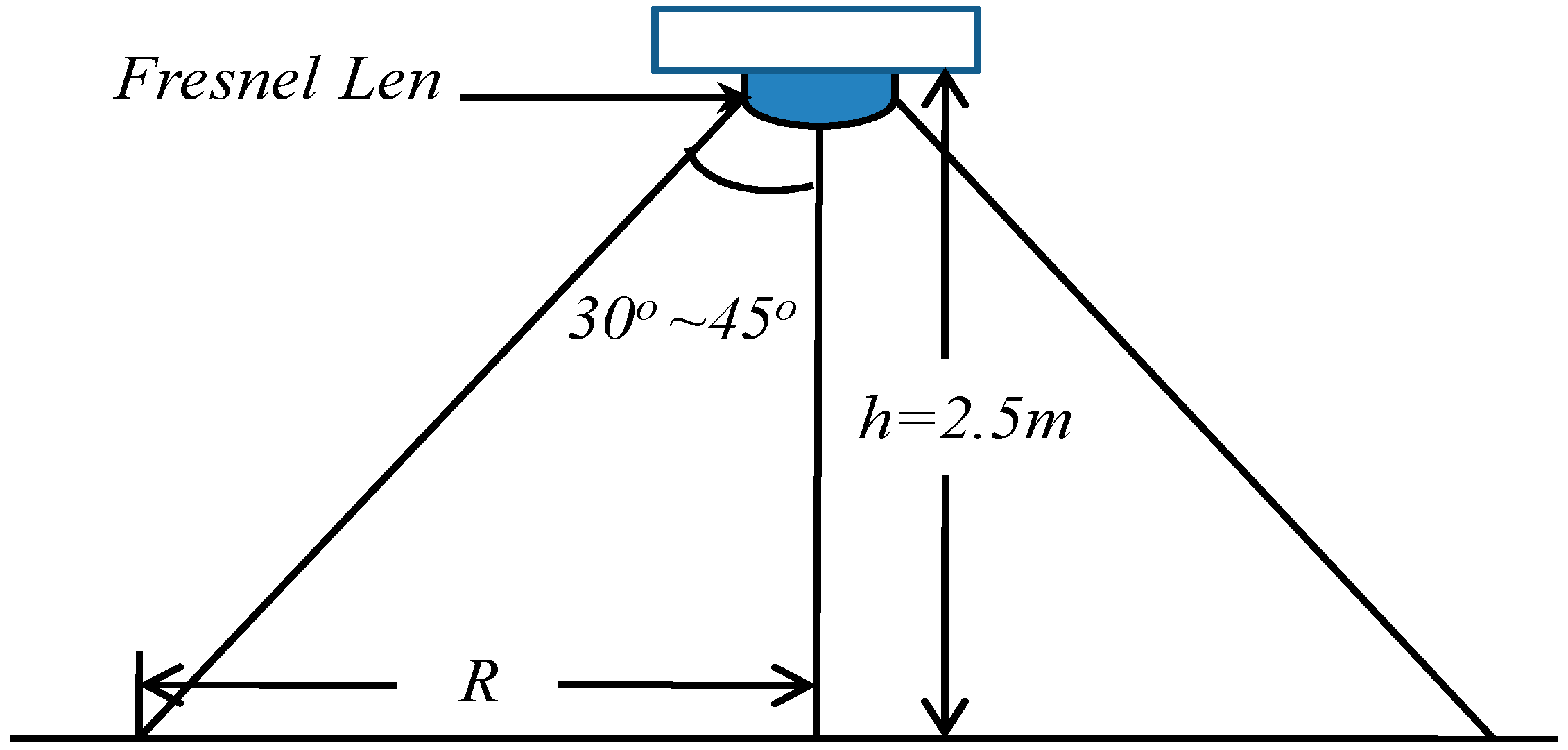
2.1. Positioning Scheme using PIR Sensors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Compact size | 24 × 32 mm |
| DC Supply current | 5–20 V |
| Current drain | 50 µA |
| Voltage output | High/Low level signal: 3.3 V |
| Delay time | 5 s–18 min |
| Infrared sensor | dual element, low noise, high sensitivity |
| Operation temperature | −15–70 ˚C |
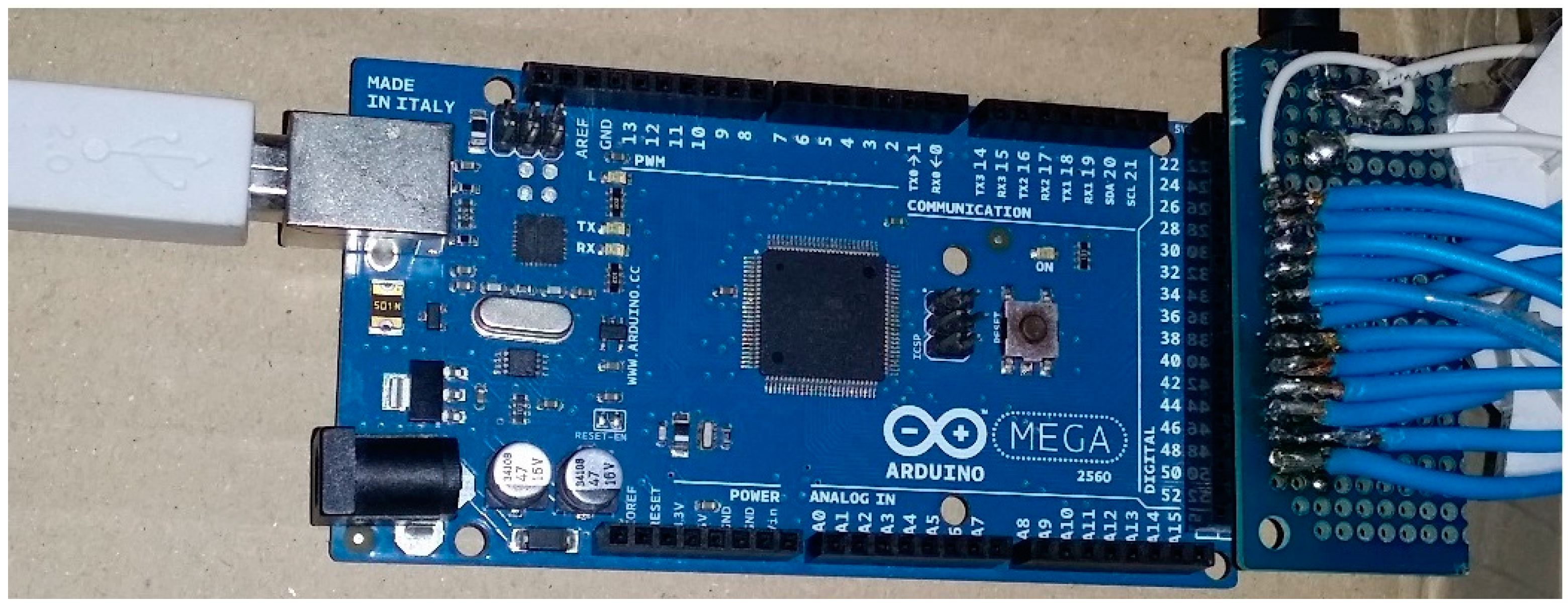
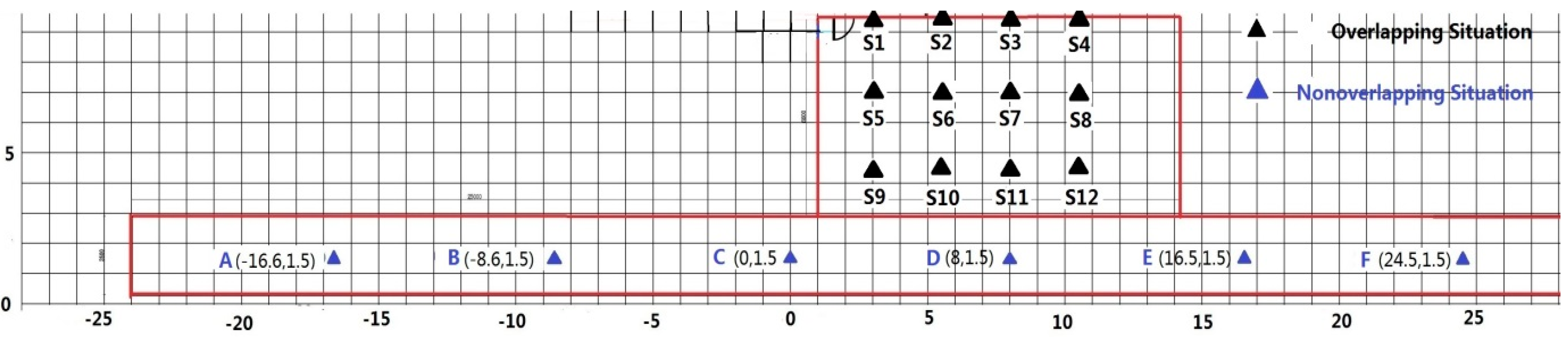
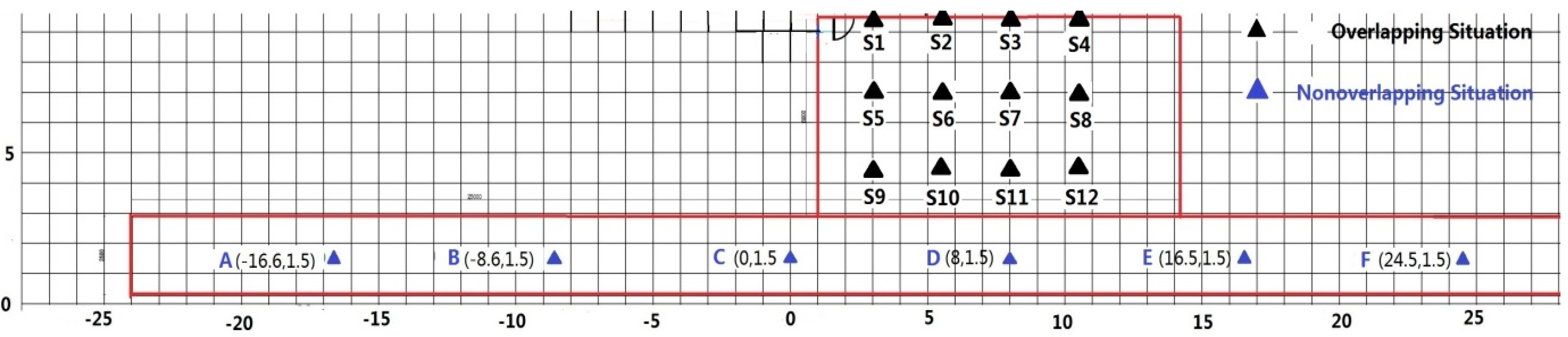
2.2. Experimental Environments
3. Performance Evaluation of Proposed Scheme
3.1. Non-Overlapping Situation
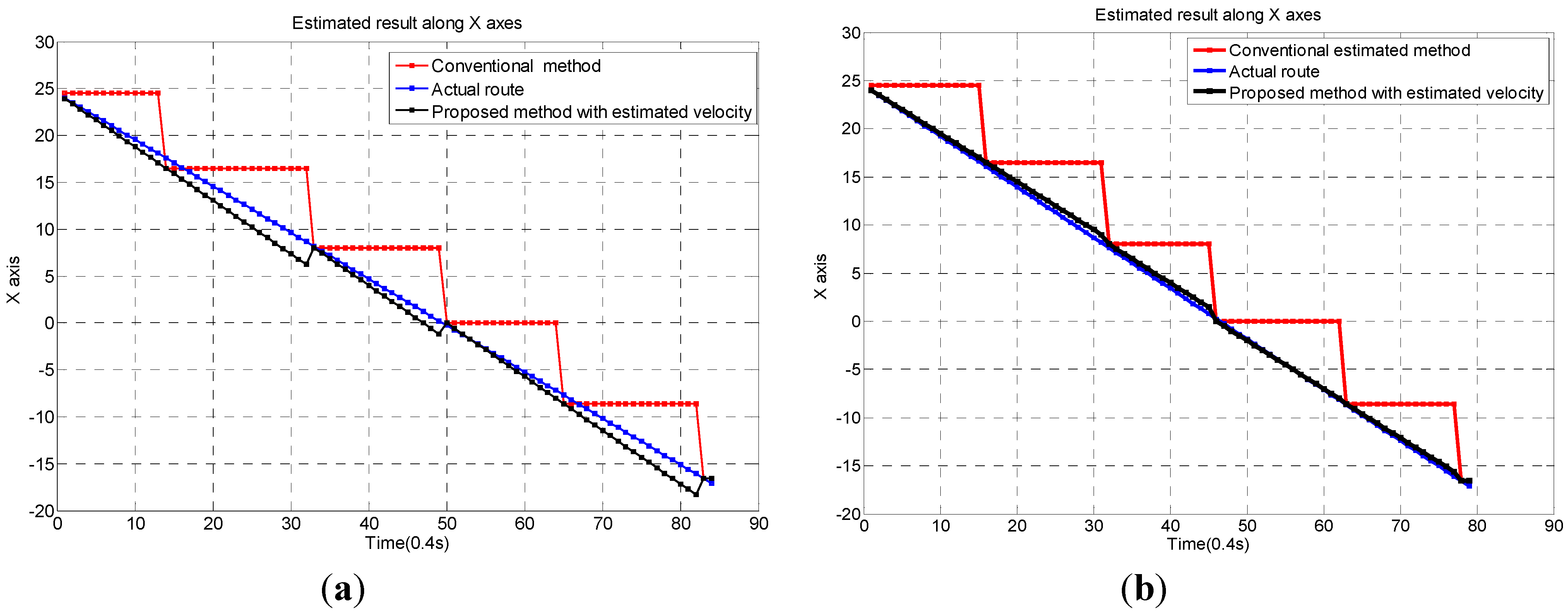
| Route A➔B➔C➔D➔E➔F | Conventional method | Proposed method |
|---|---|---|
| Person 1 | 3.5263 | 0.3940 |
| Person 2 | 3.9418 | 0.3504 |
3.2. Overlapping Situation
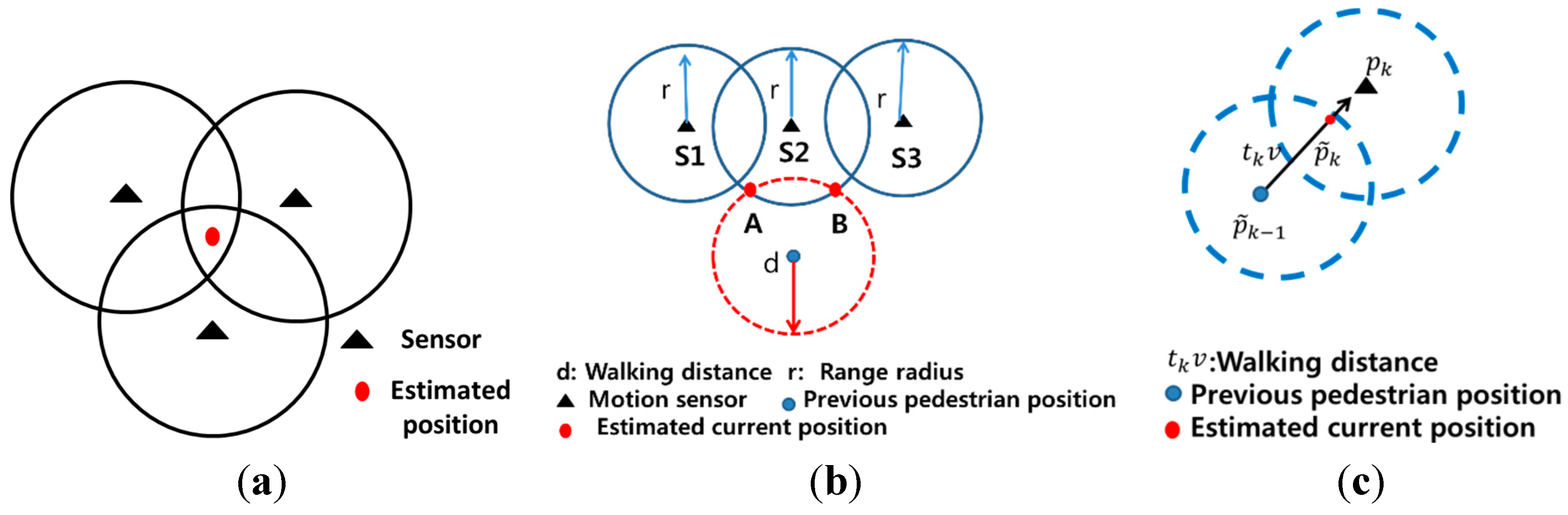
3.2.1. Proximate Method
| Time period, tk, tk+1 | Estimated position |
|---|---|
 | 2pk−1/3 + pk/3 |
 | pk−1/3 + 2pk/3 |
 | pk |
 | pk+1/5 + 2(pk−1 + pk)/5 |
 | pk−1/5 + 2(pk + pk+1)/5 |
 | 1/2(pk + pk+1) |
3.2.2. Circ-Circ Method
3.2.3. Kalman Filter Approach




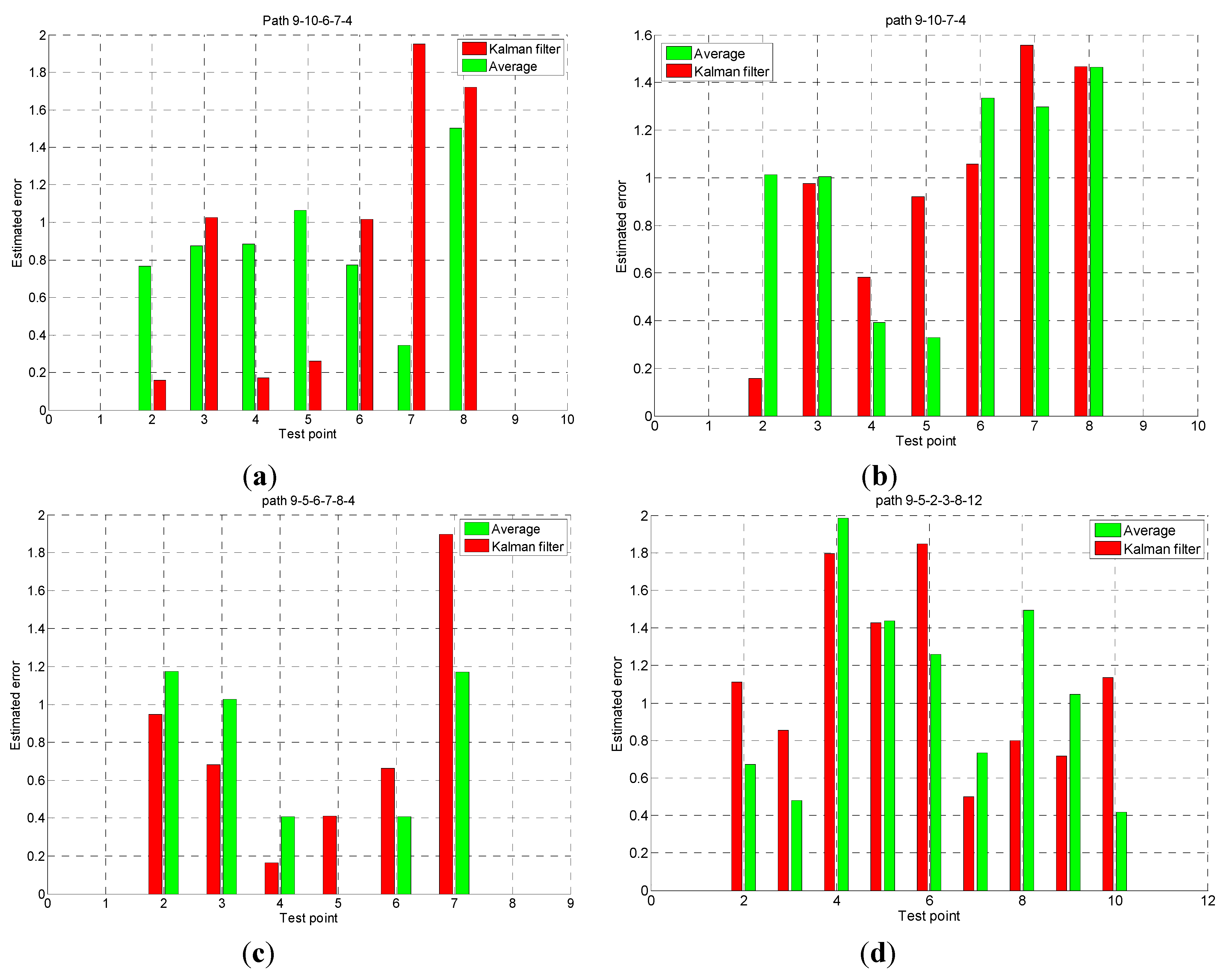
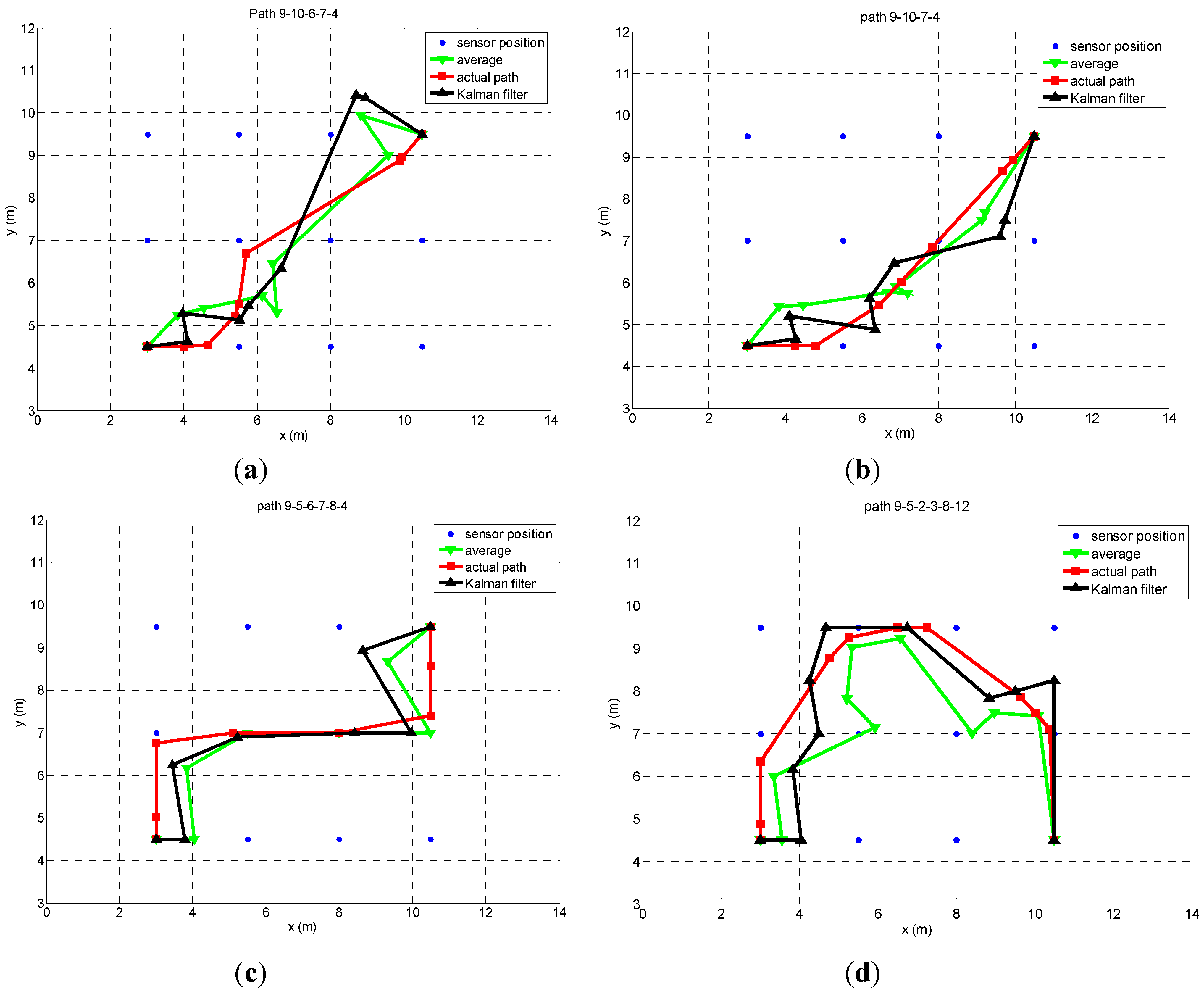
3.2.4. Tracking performance of Overlapping Situation
| Route | Circ-circ method | Proximate method | Average method | Kalman filter |
|---|---|---|---|---|
| 9➔10➔6➔7➔4 | 0.8361 | 0.8380 | 0.6895 | 0.7004 |
| 9➔10➔7➔4 | 1.0296 | 0.8269 | 0.7604 | 0.7961 |
| 9➔5➔6➔7➔8➔4 | 0.8690 | 0.7550 | 0.5230 | 0.5959 |
| 9➔5➔2➔3➔8➔12 | 1.250 | 0.9850 | 0.8659 | 0.9260 |

4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Augusto, J.C.; Callaghan, V.; Cook, D.; Kameas, A.; Satoh, I. Intelligent Environments: A Manifesto. Human-Centric Comput. Inf. Sci. 2013, 3, 1–18. [Google Scholar]
- Hong, S.; Chang, J. A New k-NN Query Processing Algorithm based on Multicasting-based Cell Expansion in Location-based Services. J. Converg. 2013, 2, 5–10. [Google Scholar]
- Kim, H.I.; Kim, Y.K.; Chang, J.W. A Grid-based Cloaking Area Creation Scheme for Continuous LBS Queries in Distributed Systems. J. Converg. 2013, 1, 24–30. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. 2007, 6, 1067–1080. [Google Scholar]
- Lin, T.; Lin, P. Performance comparison of indoor positioning techniques based on location fingerprinting in wireless networks. In Proceedings of International Conference on Wireless Networks, Communications and Mobile Computing, Hawaii, HI, USA, 13–16 June 2007; pp. 1569–1574.
- Kolodziej, K.W.; Hjelm, J. Local Positioning Systems: LBS Applications and Services; CRC Press: New York, NY, USA, 2010. [Google Scholar]
- Dubey, T.; Sahu, O.P. Self-Localized Packet Forwarding in Wireless Sensor Networks. J. Inf. Process. Syst. 2013, 3, 477–488. [Google Scholar]
- Liu, Y.; Yang, Z. Location, Localization and Localizability; Springer: New York, NY, USA, 2011. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, C.; Zhou, B.; Kim, N.; Kim, Y. Performance Evaluation of an Indoor Positioning Scheme Using Infrared Motion Sensors. Information 2014, 5, 548-557. https://doi.org/10.3390/info5040548
Jing C, Zhou B, Kim N, Kim Y. Performance Evaluation of an Indoor Positioning Scheme Using Infrared Motion Sensors. Information. 2014; 5(4):548-557. https://doi.org/10.3390/info5040548
Chicago/Turabian StyleJing, Changqiang, Biao Zhou, Nammoon Kim, and Youngok Kim. 2014. "Performance Evaluation of an Indoor Positioning Scheme Using Infrared Motion Sensors" Information 5, no. 4: 548-557. https://doi.org/10.3390/info5040548
APA StyleJing, C., Zhou, B., Kim, N., & Kim, Y. (2014). Performance Evaluation of an Indoor Positioning Scheme Using Infrared Motion Sensors. Information, 5(4), 548-557. https://doi.org/10.3390/info5040548