
Interference Management in UAV-Assisted Multi-Cell Networks


Abstract
1. Introduction
- This paper presents the first formulation of the abovementioned fairness-aware sum-rate optimization problem as a mixed-integer non-linear program (MINLP).
- A surrogate mixed-integer linear program (MILP) formulated to tackle the non-convexity in our MINLP is presented. Considering the fact that solving our MILP is challenging in large-scale networks, this paper outlines a GA-based two-stage approach to solve our sum-rate maximization problem efficiently. In Stage-1, we use a genetic algorithm to address the combinatorial challenges of BS sub-band assignment and UAV location selection. In Stage-2, we then solve a linear program to determine the optimal transmit power for both BSs and UAVs.
- This paper presents the first study of the aforementioned problems with the following aspects: (i) the number of BSs, (ii) the coverage area of each cell, and (iii) the number of UE per cell. The results show that our proposed two-stage approach closely approximates the optimal solution in small-scale networks. Critically, it outperforms competitive benchmarks in terms of sum-rate and fairness.
2. Related Works
| Notation | Description | Unit |
| 1. Sets | ||
| Set of BSs | — | |
| Set of UAVs | — | |
| UAVs in cell k | — | |
| Set of UE | — | |
| UE in cell k | — | |
| UE in cell k associated with BS k | — | |
| UE in cell k associated with UAV v | — | |
| Set of sub-bands | — | |
| Set of time slots | — | |
| Candidate locations for UAV v | — | |
| Links between UAV v and UE | — | |
| 2. Constants | ||
| Distance from BS k to UE u | m | |
| Distance from BS k to UAV location | m | |
| Distance from UAV location to UE u | m | |
| Maximum BS transmit power | W | |
| Transmit power of UAV v | W | |
| Noise power | W/Hz | |
| 3. Variables | ||
| Fraction of total power used in slot t | – | |
| Transmit power of BS k in slot t | W | |
| 1 if sub-band s is assigned to BS k | – | |
| 1 if UAV v placed at location | – | |
| 1 if link is active | – | |
3. Preliminaries
3.1. UAV Assignment and Association
3.2. Channel Model
3.3. Data Transmissions
3.3.1. Uncoordinated Slot
3.3.2. Coordinated Slot
3.4. Problem Statement
4. A Genetic Algorithm-Based Solution
- Initialization: GA begins by randomly generating an initial population of chromosomes.
- Selection: It evaluates the fitness scores of each chromosome. It preferentially selects chromosomes with a higher fitness score to form the basis of the next generation and serve as parent chromosomes.
- Crossover: It selects parent chromosomes and combines them via a so-called crossover operation to produce new chromosomes/offspring, aiming to integrate characteristics of existing chromosomes that exhibit higher fitness.
- Mutation: A mutation operation introduces randomness within chromosomes, thereby enhancing the exploration of the solution space and helping to escape local optima.
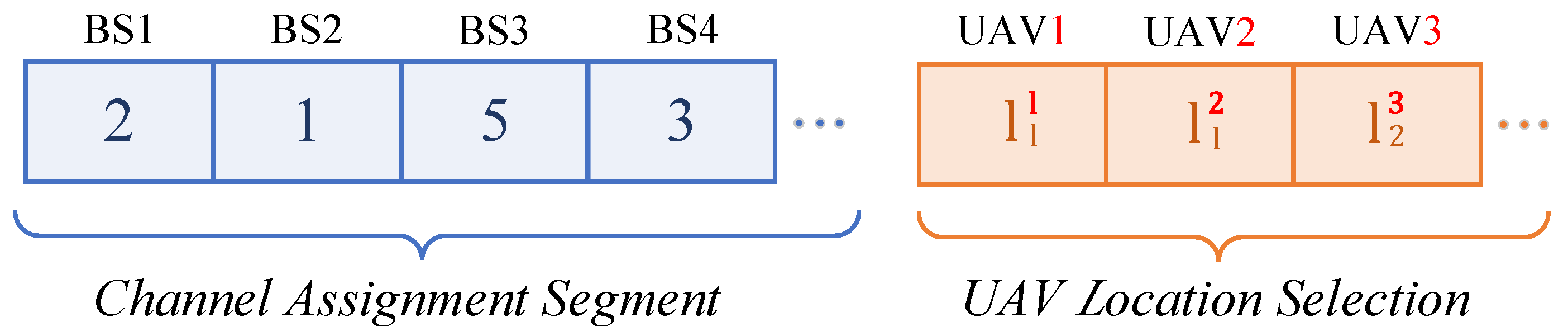
4.1. Genotypes Encoding
4.2. Fitness Evaluation
4.3. Selection
4.4. Crossover
4.5. Mutation
4.6. Population Update
4.7. Discussion
4.8. Computational Complexity Analysis
5. Results
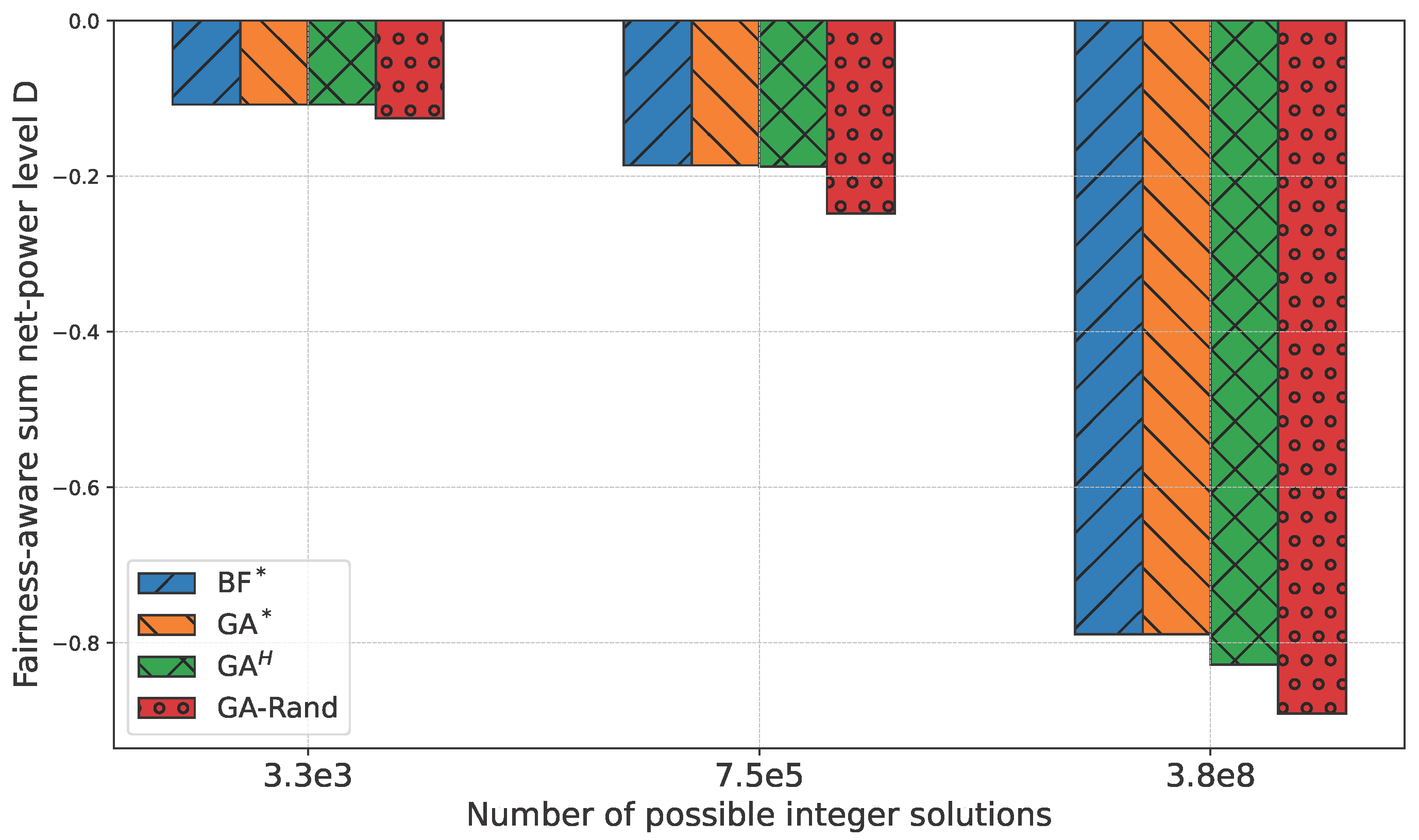
- (brute-force search): It generates exhaustive combinations of both the cell channel assignment and UAV location selection solutions. It then solves each of them using LP (P3) to determine the optimal solution. Note that BF can only be used for small-scale networks.
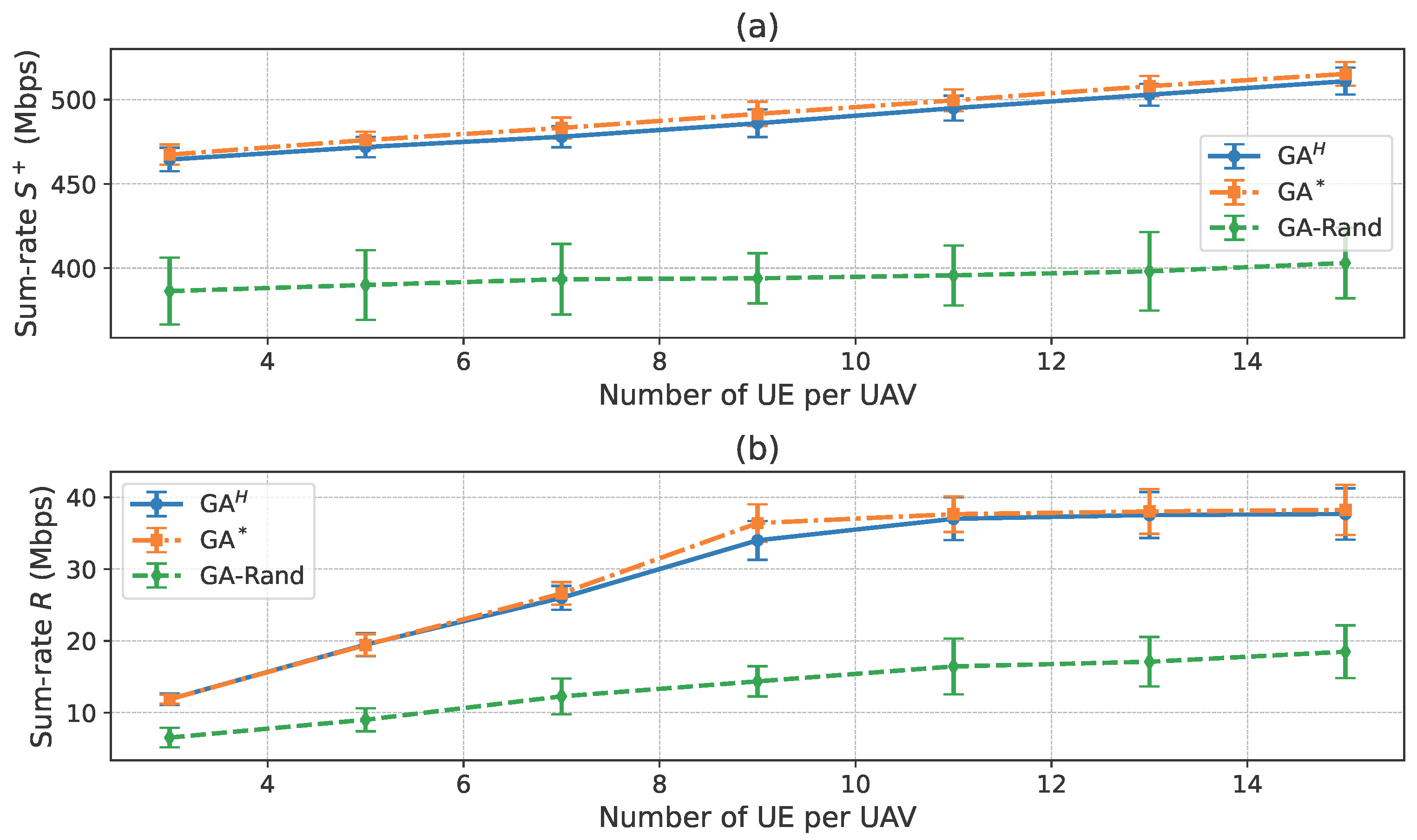
- : It follows the same GA procedure as described in Section 4. However, it solves problem (P2) and uses the resulting objective value as the fitness for a given chromosome. Note that there is a trade-off between computational efficiency and optimality because is required to solve problem (P3) for each chromosome in one population and over all generations.
- GA−Rand: It adopts a standard GA-based approach as outlined in [36] to manage interference levels at UE in dense wireless networks. Briefly, it solves a sub-band allocation problem with the objective of maximizing the minimum SINR among all UE. Since the originally proposed method is not directly applicable to UAV-assisted networks, we extend it by randomly selecting a candidate location for each UAV.
5.1. Optimality Gap
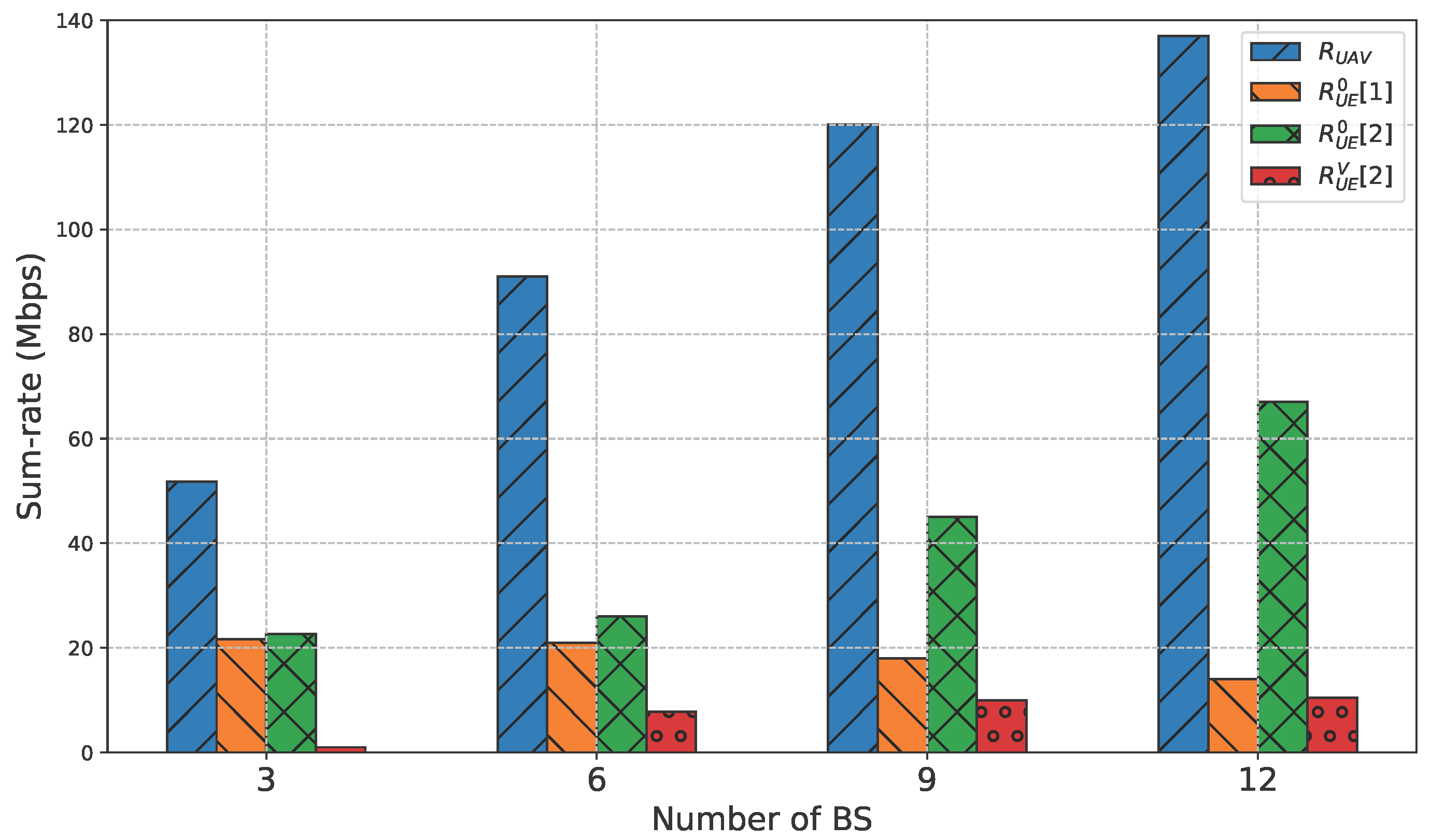
5.2. Number of Base Stations
5.3. Coverage per Cell
5.4. Number of UE per Cell
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tinh, B.T.; Nguyen, L.D.; Kha, H.H.; Duong, T.Q. Practical Optimization and Game Theory for 6G Ultra-Dense Networks: Overview and Research Challenges. IEEE Access 2022, 10, 13311–13328. [Google Scholar] [CrossRef]
- Khorov, E.; Kiryanov, A.; Lyakhov, A.; Bianchi, G. A Tutorial on IEEE 802.11ax High Efficiency WLANs. IEEE Commun. Surv. Tuts. 2019, 21, 197–216. [Google Scholar] [CrossRef]
- López Raventós, Á.; Bellalta, B. Concurrent decentralized channel allocation and access point selection using multi-armed bandits in multi BSS WLANs. Elsevier Comput. Netw. 2020, 180, 107381. [Google Scholar] [CrossRef]
- Gao, H.; Feng, J.; Xiao, Y.; Zhang, B.; Wang, W. A UAV-Assisted Multi-Task Allocation Method for Mobile Crowd Sensing. IEEE Trans. Mob. Comput. 2023, 22, 3790–3804. [Google Scholar] [CrossRef]
- Wu, K.; Chin, K.W.; Soh, S. Multi-UAVs Network Design Algorithms for Computed Rate Maximization. IEEE Trans. Mob. Comput. 2024, 23, 8965–8980. [Google Scholar] [CrossRef]
- Song, Z.; Chin, K.W.; Yang, C.; Ros, M. Methods to Assign UAVs for K-Coverage and Recharging in IoT Networks. IEEE Trans. Mob. Comput. 2024, 23, 2504–2519. [Google Scholar] [CrossRef]
- Forghani, A.; Chin, K.W.; Ros, M. Scheduling Services in Multi-UAVs IoT Networks. IEEE Internet Things J. 2025; Early Access. [Google Scholar] [CrossRef]
- Forghani, A.; Chin, K.W.; Ros, M. Optimizing Virtual Functions Deployment in Multi-UAV IoT Networks. IEEE Internet Things J. 2024, 11, 20367–20378. [Google Scholar] [CrossRef]
- Cui, Y.; Chin, K.W.; Soh, S. Maximizing UAV Tasks Computation Quality in Energy Harvesting IIoT. IEEE Trans. Ind. Inform. 2025, 21, 4447–4456. [Google Scholar] [CrossRef]
- Kim, J.; Park, S.; Jung, S.; Cordeiro, C. Cooperative Multi-UAV Positioning for Aerial Internet Service Management: A Multi-Agent Deep Reinforcement Learning Approach. IEEE Trans. Netw. Serv. Manag. 2024, 21, 3797–3812. [Google Scholar] [CrossRef]
- Hamza, A.S.; Khalifa, S.S.; Hamza, H.S.; Elsayed, K. A survey on inter-cell interference coordination techniques in OFDMA-based cellular networks. IEEE Commun. Surv. Tuts 2013, 15, 1642–1670. [Google Scholar] [CrossRef]
- Kosta, C.; Hunt, B.; Quddus, A.U.; Tafazolli, R. On interference avoidance through inter-cell interference coordination (ICIC) based on OFDMA mobile systems. IEEE Commun. Surv. Tuts 2012, 15, 973–995. [Google Scholar] [CrossRef]
- Chiecochan, S.; Hossain, E.; Diamond, J. Channel Assignment Schemes for Infrastructure-Based 802.11 WLANs: A Survey. IEEE Commun. Surv. Tuts 2010, 12, 124–136. [Google Scholar] [CrossRef]
- Nakashima, K.; Kamiya, S.; Ohtsu, K.; Yamamoto, K.; Nishio, T.; Morikura, M. Deep Reinforcement Learning-Based Channel Allocation for Wireless LANs With Graph Convolutional Networks. IEEE Access 2020, 8, 31823–31834. [Google Scholar] [CrossRef]
- Oh, H.; Jeong, D.G.; Jeon, W.S. Joint Radio Resource Management of Channel-Assignment and User-Association for Load Balancing in Dense WLAN Environment. IEEE Access 2020, 8, 69615–69628. [Google Scholar] [CrossRef]
- Luo, Y.; Chin, K.W. Learning to bond in dense WLANs with random traffic demands. IEEE Trans. Vehic. Tech. 2020, 69, 11868–11879. [Google Scholar] [CrossRef]
- Sarwar, M.Z.; Chin, K.W. On Supporting Legacy and RF Energy Harvesting Devices in Two-Tier OFDMA Heterogeneous Networks. IEEE Access 2018, 6, 62538–62551. [Google Scholar] [CrossRef]
- Chih, T.H.; Su, S.L.; Hung, T.M. Two-phase downlink subcarrier allocation for multicell OFDMA systems. Springer Wirel. Networks 2018, 25, 2081–2090. [Google Scholar] [CrossRef]
- Mei, W.; Wu, Q.; Zhang, R. Cellular-Connected UAV: Uplink Association, Power Control and Interference Coordination. IEEE Trans. Wirel. Commun. 2019, 18, 5380–5393. [Google Scholar] [CrossRef]
- Challita, U.; Saad, W.; Bettstetter, C. Interference Management for Cellular-Connected UAVs: A Deep Reinforcement Learning Approach. IEEE Trans. Wirel. Commun. 2019, 18, 2125–2140. [Google Scholar] [CrossRef]
- Mei, W.; Zhang, R. Cooperative Downlink Interference Transmission and Cancellation for Cellular-Connected UAV: A Divide-and-Conquer Approach. IEEE Trans. Wirel. Commun. 2020, 68, 1297–1311. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Ho, T.M.; Le, L.B.; Girard, A. UAV Trajectory and Sub-channel Assignment for UAV Based Wireless Networks. In Proceedings of the IEEE WCNC, Virtual Conference, Seoul, Republic of Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- He, Y.; Wang, D.; Huang, F.; Zhang, R.; Pan, J. Trajectory Optimization and Channel Allocation for Delay Sensitive Secure Transmission in UAV-Relayed VANETs. IEEE Trans. Veh. Technol. 2022, 71, 4512–4517. [Google Scholar] [CrossRef]
- Zhai, D.; Li, H.; Tang, X.; Zhang, R.; Ding, Z.; Yu, F.R. Height Optimization and Resource Allocation for NOMA Enhanced UAV-Aided Relay Networks. IEEE Trans. Commun 2021, 69, 962–975. [Google Scholar] [CrossRef]
- Liu, X.; Lai, B.; Gou, L.; Lin, C.; Zhou, M. Joint Resource Optimization for UAV-Enabled Multichannel Internet of Things Based on Intelligent Fog Computing. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2814–2824. [Google Scholar] [CrossRef]
- Singh, S.; Kumbhar, A.; Guvenc, I.; Sichitiu, M.L. Distributed Approaches for Inter-Cell Interference Coordination in UAV-Based LTE-Advanced HetNets. In Proceedings of the IEEE 88th VTC, Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar]
- Ahmad, I.; Hussain, S.; Mahmood, S.N.; Mostafa, H.; Alkhayyat, A.; Marey, M.; Abbas, A.H.; Abdulateef Rashed, Z. Co-Channel Interference Management for Heterogeneous Networks Using Deep Learning Approach. Information 2023, 14, 139. [Google Scholar] [CrossRef]
- Lopez-Perez, D.; Guvenc, I.; De la Roche, G.; Kountouris, M.; Quek, T.Q.; Zhang, J. Enhanced intercell interference coordination challenges in heterogeneous networks. IEEE Wirel. Commun. 2011, 18, 22–30. [Google Scholar] [CrossRef]
- Study on Channel Model for Frequencies from 0.5 to 100 Ghz. 2022. Available online: https://www.etsi.org/deliver/etsi_tr/138900_138999/138901/16.01.00_60/tr_138901v160100p.pdf (accessed on 22 December 2024).
- Study on Enhanced LTE Support for Aerial Vehicles. 2017. Available online: https://www.tech-invite.com/3m36/tinv-3gpp-36-777.html (accessed on 22 December 2024).
- Wang, Z. A survey on convex optimization for guidance and control of vehicular systems. Annu. Rev. Control 2024, 57, 100957. [Google Scholar] [CrossRef]
- Lipowski, A.; Lipowska, D. Roulette-wheel selection via stochastic acceptance. Phys. A Stat. Mech. Its Appl. 2012, 391, 2193–2196. [Google Scholar] [CrossRef]
- Bhandari, D.; Murthy, C.A.; Pal, S.K. Genetic Algorithm with Elistist Model and Its Convergence. Int. J. Pattern Recognit. Artif. Intell. 1996, 10, 731–747. [Google Scholar] [CrossRef]
- Hassan, R.; Cohanim, B.; de Weck, O.; Venter, G. A Comparison of Particle Swarm Optimization and the Genetic Algorithm. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005. [Google Scholar]
- Potra, F.A.; Wright, S.J. Interior-point methods. J. Comput. Appl. Math. 2000, 124, 281–302. [Google Scholar] [CrossRef]
- Hu, X.; Ge, S.; Xiao, J. Channel allocation based on genetic algorithm for multiple IEEE 802.15.4-compliant wireless sensor networks. In Proceedings of the ICSPCC, Xiamen, China, 22–25 October 2017. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value(s) | Parameter | Value(s) |
|---|---|---|---|
| K | 5–20 | BS coverage | 20–60 m |
| B | 1 MHz | 4–6 | |
| 5 W | dBm/Hz | ||
| 2–10 | 2–5 | ||
| 5–20 | 100 | ||
| 2 GHz | 200 | ||
| 1.5 m | 25 | ||
| 100–300 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, M.; Ren, H.; Qi, Y.; Wu, T. Interference Management in UAV-Assisted Multi-Cell Networks. Information 2025, 16, 481. https://doi.org/10.3390/info16060481
Jiang M, Ren H, Qi Y, Wu T. Interference Management in UAV-Assisted Multi-Cell Networks. Information. 2025; 16(6):481. https://doi.org/10.3390/info16060481
Chicago/Turabian StyleJiang, Muchen, Honglin Ren, Yongxing Qi, and Ting Wu. 2025. "Interference Management in UAV-Assisted Multi-Cell Networks" Information 16, no. 6: 481. https://doi.org/10.3390/info16060481
APA StyleJiang, M., Ren, H., Qi, Y., & Wu, T. (2025). Interference Management in UAV-Assisted Multi-Cell Networks. Information, 16(6), 481. https://doi.org/10.3390/info16060481