This section analyzes the dynamics of a system that comprises two interactive oscillating agents. The stability of the system is then characterized in terms of key parameters including the separation between the oscillation centers and the level of interaction gain. An oscillating agent is noted for its circular motion and range-maintaining property. In the following section, an oscillating agent is assumed to be governed by the following equation of motion:
where
is the position of the agent in
,
is a skew symmetric matrix that characterizes the rotation,
is the oscillation center, and
is the control input. If the initial condition of
is not the same as the oscillation center
, then, in the absence of control input, the position of the agent in the steady state is known to be given by
for some
. This corresponds to an oscillatory trajectory centering at
with radius 1. In practice, an agent that undergoes an oscillatory motion can be used for patrolling, search, and area defense applications. It is noted that the oscillation frequency and radius of the oscillating agent can be adjusted by scaling the matrix
as
for some
and replacing the term
in (
1) as
for some
, respectively. In the paper, we consider the agent in (
1) and it is pointed out that the results can be generalized to agents with different oscillation frequency and radius. The above oscillating agent model can be used to describe the behavior of a fixed-wing aircraft under coordinated fixed-altitude flight or a wheeled robot under constant turning condition. In other words, the agent is capable of exhibiting a circular motion; the paper aims to investigate the emergent behavior under interaction.
The paper attempts to investigate the dynamics and motions of two oscillating agents when they are coupled in the sense that the control input of an agent is affected by the relative position with respect to another agent. More precisely, suppose that
and
are the oscillation centers of the two agents at
and
, respectively. Under the aforementioned control strategy, the motions of the agents are governed by
where
k is the interaction or control gain. In this formulation, the motion of the agent is affected by the self-oscillating component and the interaction component, which is characterized as a linear function of the line-of-sight vector. Clearly, if the interaction gain
k is zero, then the two agents oscillate about their respective centers independently. As will be discussed in the paper, a change in the interaction gain may result in a change in the number of equilibrium points and stability properties. The agents may then undergo limit-cycle or stationary motions, depending on the selection of the interaction gain. Further, the setting of the oscillation centers may also affects the results. An application scenario of the results is for the control center to dispatch two agents to cover an area. The two agents can interact in an event to autonomously gain dense coverage of certain region or remain at fixed points to meet some surveillance or monitoring requirements.
2.1. Analysis of Fixed Points
The fixed points of (
4a) and (
4b) are determined by finding constant
and
, in the sense that
and
. This can be equivalently stated as
Equation (
5) is independent of the vector
and will be used to establish a relationship between
and
. Further, (
6) will be explored to render a characterization of the equilibrium state. Note that
and
are orthogonal to each other, that is,
; one can thus express
as
for some
and
. From (
7), it can be shown that
Substituting the above expressions (
7) and (
8) into (
5) yields
where
. Combining the above two equations then results in a constraint on
and
:
It is claimed that the only solution to (
11) is
and
. In addition, the equilibrium state of the system is reached at
To see this, let
be the left-hand side of (
11). It is clear that
; that is,
and
constitute a solution of (
11). Let
and
for some
r and
in which
r is assumed to be non-negative. Some manipulations reveal that the function
can be expressed in terms of
r and
as
Thus, the function
is non-negative and the minimal is achieved at
. As a result, the only solution to (
11) is
and
. In view of (
7), (
12) is obtained.
Let
and
; then, (
6) can be rewritten as
Consequently, the vector
is solved from (
13) as
By using the orthogonality property between
and
, one has
Therefore, one can solve
from the cubic polynomial Equation (
15) and determine the equilibrium state
from (
14). It is stressed that any admissible solution
of (
15) is required to be real and non-negative. The number of solutions can indeed be analyzed by examining the intersections between the curve
, which corresponds to the left-hand side of (
15) and the level
for positive
l. This curve
increases from 0 at
and approaches
asymptotically when
l is sufficiently large. Thus, a non-negative solution can always be found.
Let
. There exists three admissible solutions (counting multiplicities) of
in (
15) if
k and
satisfy
and
Otherwise, there is only one real and non-negative solution
to (
15). Indeed, for the cubic function
, its critical points which are
l such that the slope of the function is zero, i.e.,
, are given by
Clearly, if the critical points are not real or are negative, then the curve
is monotonically increasing for
and there exists only one solution. Further, it can be shown that the point
which satisfies
is the bound on
k. In other words, if
, the polynomial
is monotonically increasing for positive
l and there is one intersection at
with the level
. Moreover, if (
16) is satisfied, it is known that the local maximal of
occurs at the critical point
, while the local minimum occurs at
. There will be only one solution if
or
. On the other hand, the cubic function intersects the level
three times if
Substituting
and
into (
18) yields (
17).
The number of solutions depends on the selection of the interaction gain
k and the distance between the oscillation centers
.
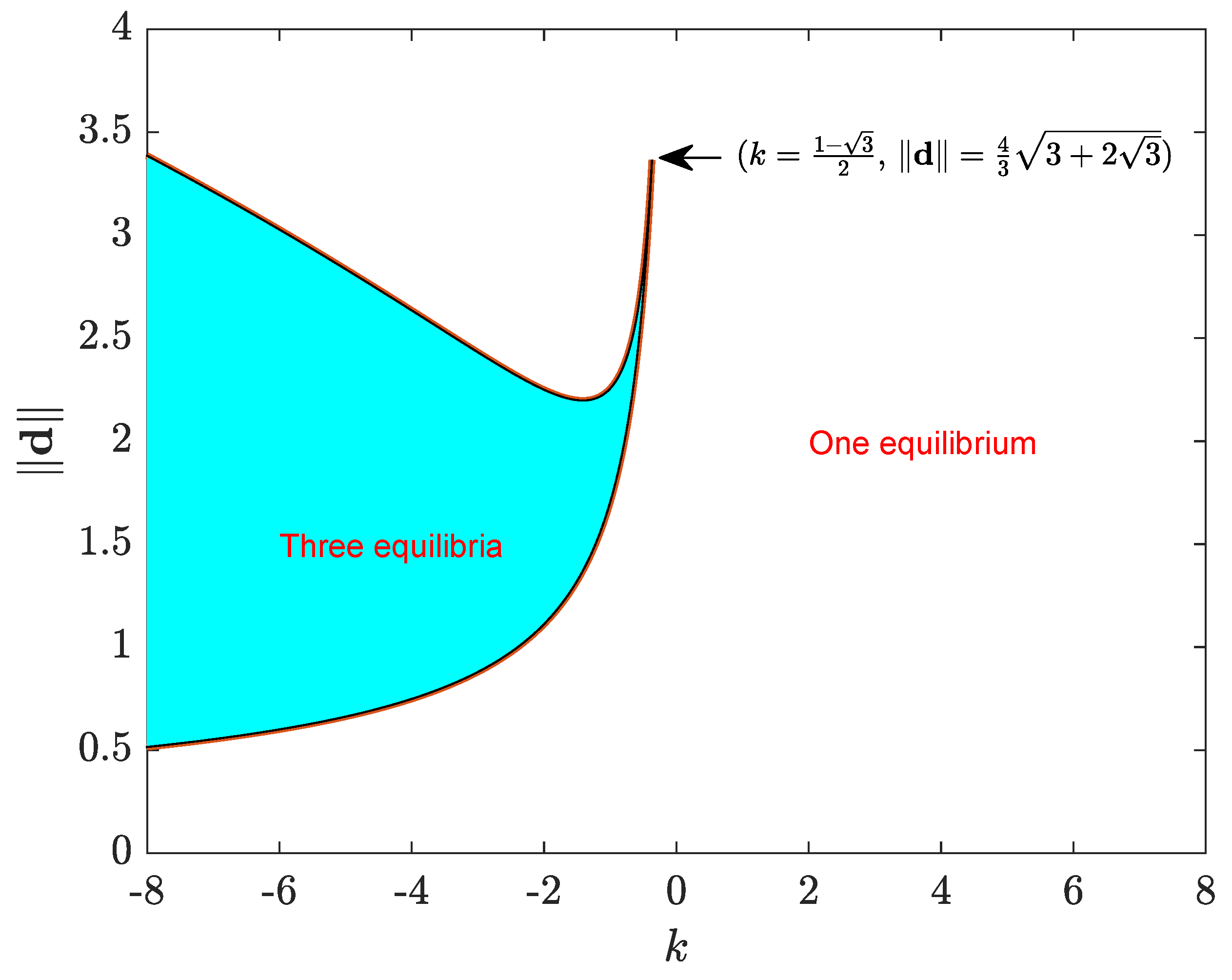
Figure 1 depicts the diagram of number of equilibrium points as a function of
k and
. It is found that, for a given
, a small change of the interaction gain
k may result in a drastic change of the number of equilibrium points. This figure can serve in the bifurcation analysis as a variation of the parameter
k or
crosses the boundary may lead to a change of the number of equilibrium points and, hence, the behavior of the system. The pivot point in the diagram is at
and
. At this pivot point, (
15) has three identical solutions as the equation can be factorized as
.
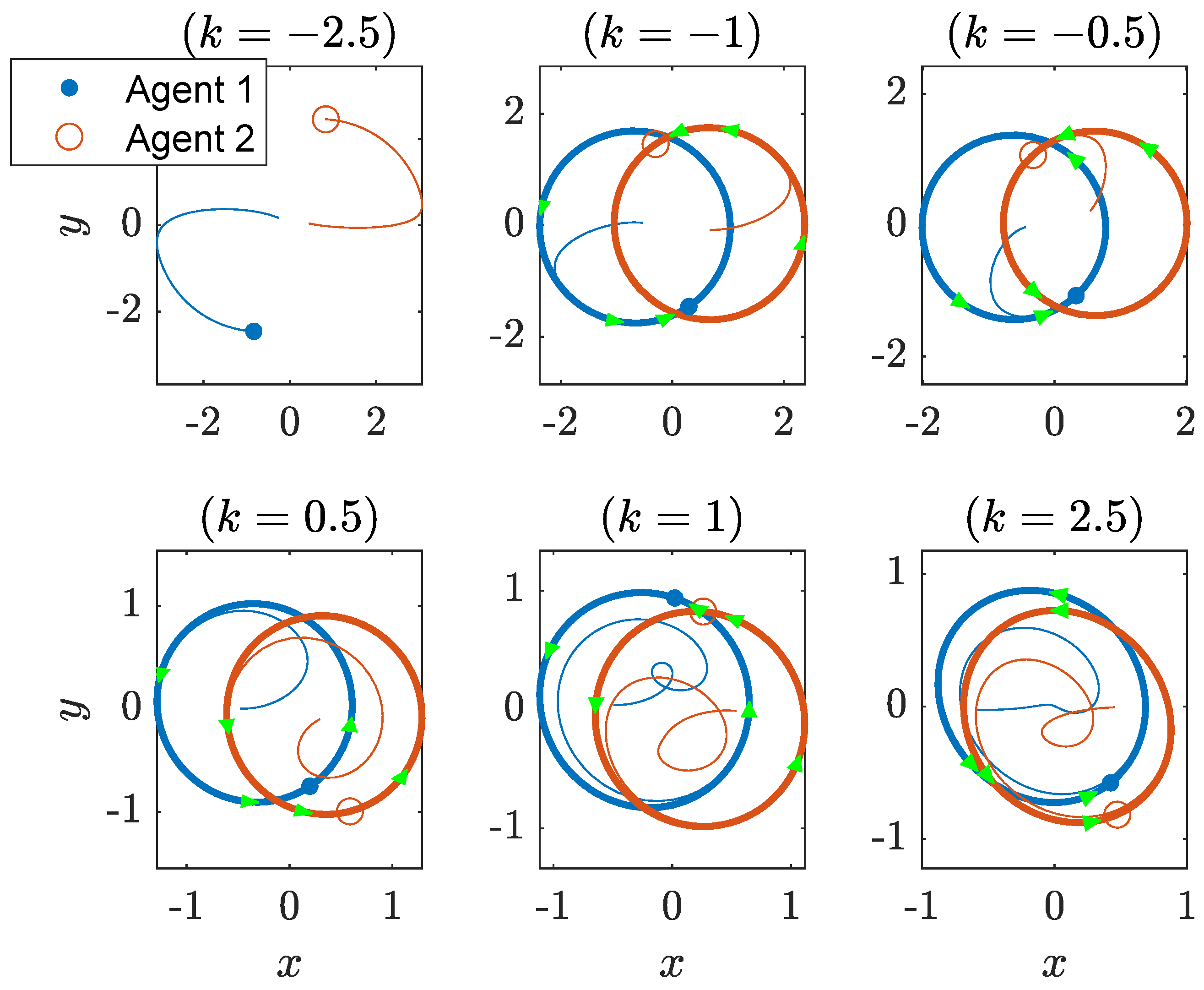
Figure 1 also illustrates that the behavior of the system may differ significantly as the sign of
k is changed. In the positive extreme when
, the solution
is approximately
and the corresponding
, from (
14), becomes
. Recall that the equilibrium state of the first agent at
is given by
, while that of the second agent at
is
. As a result, if
, then the equilibrium states of the two agents approach each other. In contrast, in the negative extreme when
, there are three equilibrium points. Through a perturbation analysis, it can be shown that the three solutions can be approximated, respectively, as
Some computations reveal that the corresponding equilibrium points are, respectively,
Note that the first equilibrium point is the same as the equilibrium point when
. The remaining two equilibrium points are related in the sense that their sum is
and their difference is
. The sum does not vary when
k is negative and large.
2.2. Stability Analysis
The subsection proceeds to analyze the stability of the system. Around the equilibrium, the perturbed state vectors are defined as
Some manipulations reveal that the dynamic equations in terms of the perturbed state vectors are
where
stands for the identity matrix. The local stability can thus be assessed in terms of the linearized model by neglecting the high order terms. From (
21a) and (
21b), the linearized model is given by
The system matrix
is similar to
. Thus, the stability is governed by the following two matrices:
and
.
Theorem 1. The equilibrium point is stable if k and the corresponding satisfy the following three conditions
- 1.
- 2.
- 3.
Proof. The sub-matrices of the system dynamics bear the form for some . It can be shown that the characteristic polynomial of is given by where and are components of . As , the characteristic polynomial can be rewritten as . The roots of the characteristic polynomial are then evaluated as . Hence, the eigenvalues of the matrix are given by and those of the matrix are . The system at the equilibrium point is stable if the eigenvalues have negative real parts. As the eigenvalues differ by in their real parts, it can then be deduced that under , the equilibrium is stable if and only if the real part of is negative. On the other hand, if , the stability is assured if and only if the real part of is negative. One can further categorize the situations by examining whether is greater than 1 or whether the eigenvalues are real. Four cases and stability criteria can then be established:
- 1.
and . Stable if .
- 2.
and . Stable if .
- 3.
and . Stable if .
- 4.
and . Stable if .
A further analysis reveals that the stability condition in case 1 is automatically satisfied. Combining the conditions in cases 2, 3, and 4, the three conditions in the statement of the theorem are obtained. □
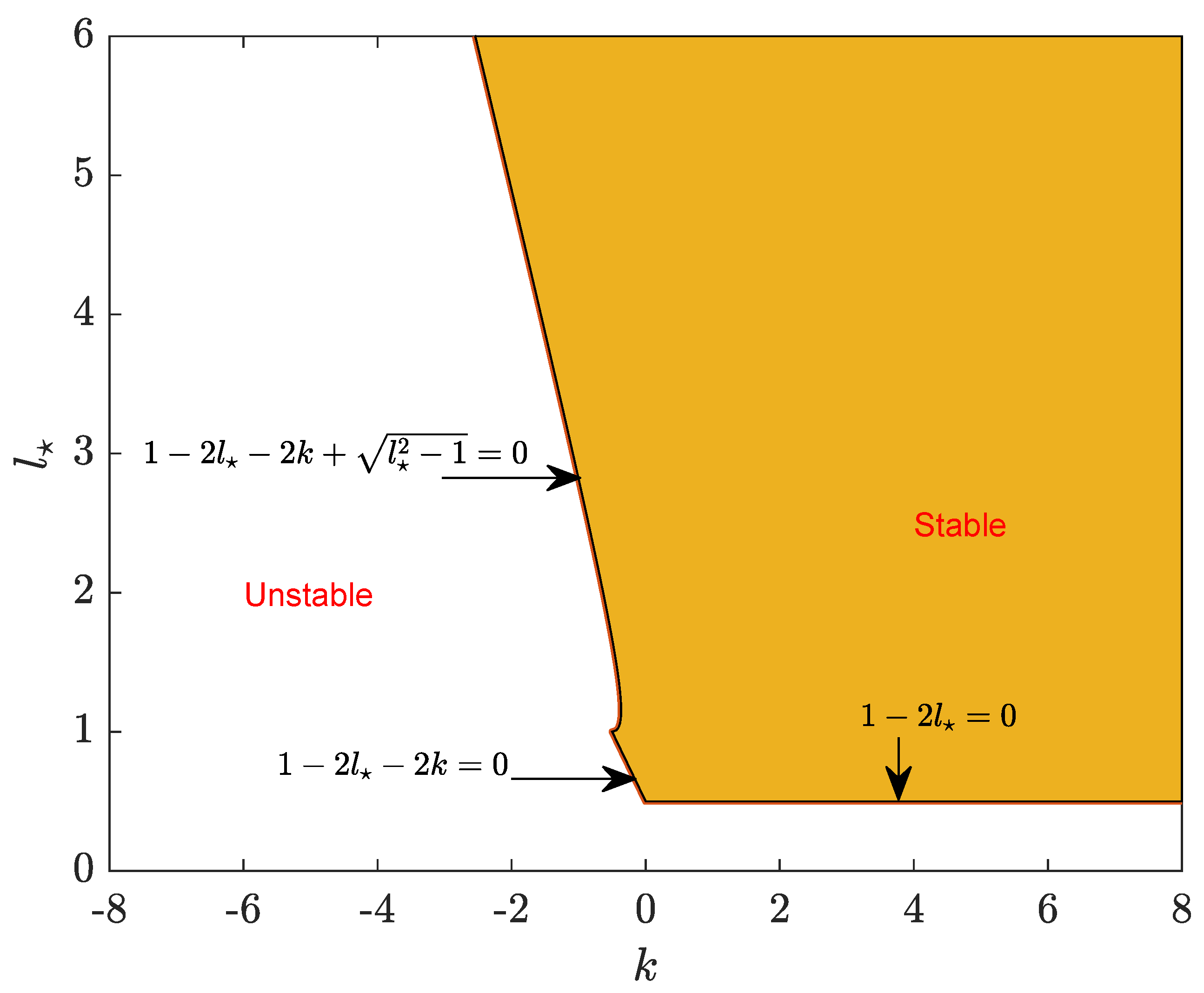
Figure 2 depicts the stability region of
k and
, as stated in Theorem 1. The figure also illustrates the curve on the boundary as discussed. If
, then the applicable criterion for the stability assessment is
. It is noted that, if
and
, then the eigenvalues are
and
. If the interaction gain
k is negative, then the equilibrium is stable only when
is sufficiently large.
Figure 2 also depicts that the pivot point
which satisfies
and there is one eigenvalue that is located at 0. The two corner points in the figure
and
are the intersections of the curve
with
and
, respectively. At the cusp
, the eigenvalues are 0, 0,
, and
and the system is marginally stable. Note that the other corner point
can never be reached in practice. Indeed, when
k is zero, the corresponding
for achieving equilibrium is
. Apparently, the point
is in the unstable region in the figure. It is nevertheless important to note that even though the stability region in the (
k,
) plane appears to be connected, the fact that the segment with
in the stable region cannot be realized implies that the stability region is in fact disconnected. This will further discussed in the following.
Theorem 1 provides criteria on k and for the assessment of local stability. It is desired to establish bounds in terms of k and for the evaluation of stability. This issue will be addressed by considering attractive interaction in which k is positive and repulsive interaction in which , respectively.
In the attractive interaction scenario, it is known that there exists only one solution of
in (
15). Further, the stability is assured if
. Re-examining (
15), it can be deduced that
if and only if
The stability criterion thus is restated as the condition on the interaction gain
k and the separation between the two oscillation centers
.
The situation becomes more subtle under repulsive interaction as there may exist three equilibrium points. The objective is to determine the combination of
k and
, such that there exists at least one stable equilibrium point. To this end, the approach is to characterize the condition that the real part of
is less than zero in terms of
k and
through (
15). Recall that the above stability condition can be cast into two cases depending on whether
is greater than 1. Consider the region in the
plane which is governed by
,
, and
. This region is indeed the triangle formed by
,
, and
. Substituting the expressions into (
15), the following inequality on
k and
is obtained.
In other words, under repulsive interaction, there exists a stable equilibrium point if (
24) is satisfied. A similar manner can be adopted to account for the region governed by
,
and
. It turns out that the bound is
This is one of the bounds in (
17) for the existence of three equilibrium points. To see this, note that if (
25) is satisfied, there then exists a solution
of (
15) and
. For such an
and with
, the conditions in Theorem 1 are met and the stability is assured. The above results are summarized in terms the following theorem.
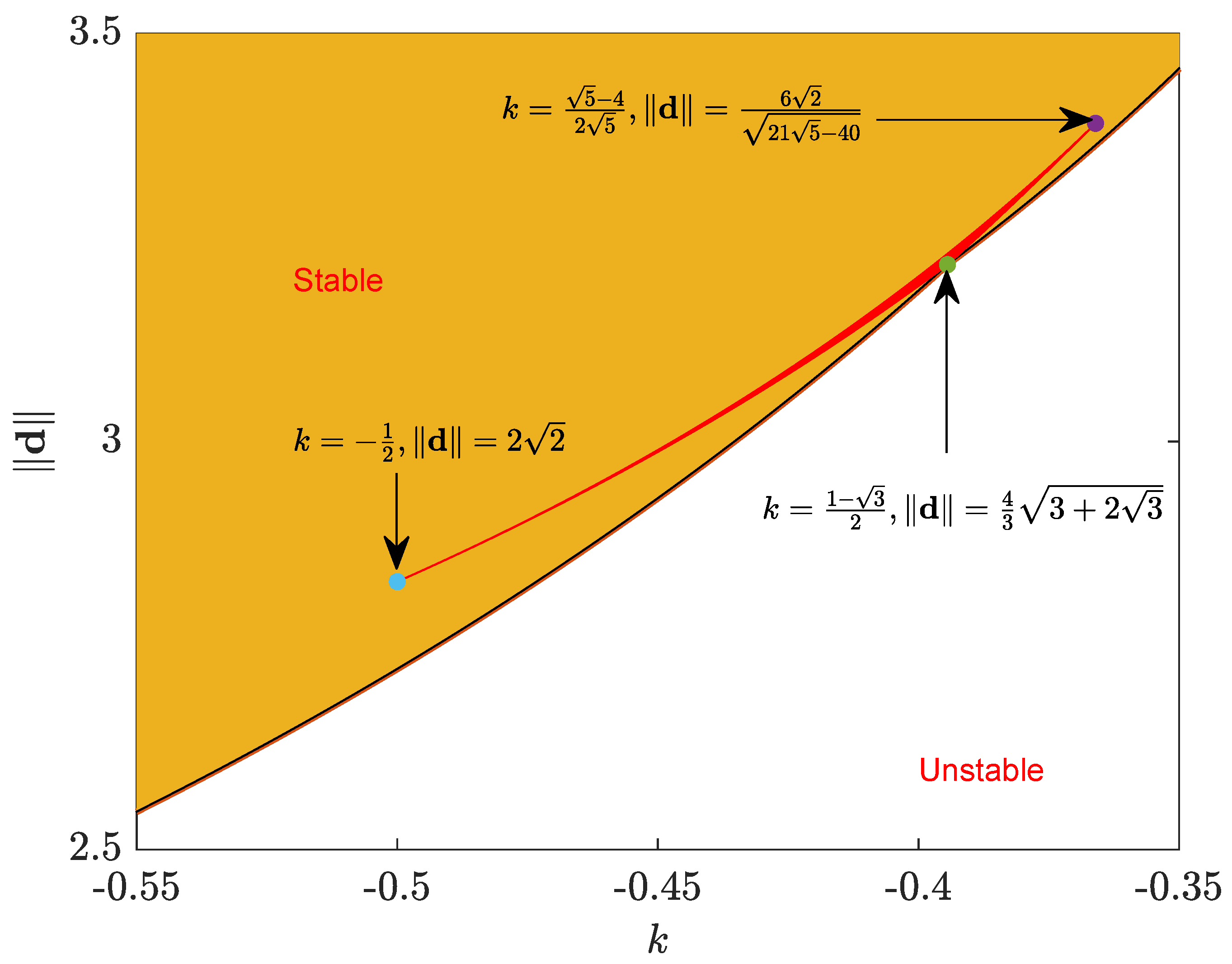
Theorem 2. If , then the equilibrium point is stable if and only if (23) is satisfied. If , there exists at least one stable equilibrium point if (24) or (25) holds. Figure 3 depicts the region of the combination of
k and
, such that there exists at least one equilibrium point that is stable. The stability region is divided into attractive and repulsive interaction sub-regions. The boundary of the attractive sub-region is governed by (
23). A point with
and
is highlighted as this
is the minimal separation distance between two oscillation centers under attractive interaction for the equilibrium point to be stable. In other words, if the separation is less than this minimal distance, there does not exist a stable equilibrium point under
. Another point that is worth mentioning is the point with
and
. For any combination of
k and
, if
and
, the resulting system has one equilibrium point and this equilibrium point is stable. In contrast, the boundaries of the repulsive sub-region are determined by (
24) and (
25). This sub-region under
is established by checking
to be greater than the minimum of
and
for
. These two boundaries intersect at
and
as marked in the figure. When
, the boundary is governed by (
24). On the other hand, when
, it is (
25) that determines the boundary.
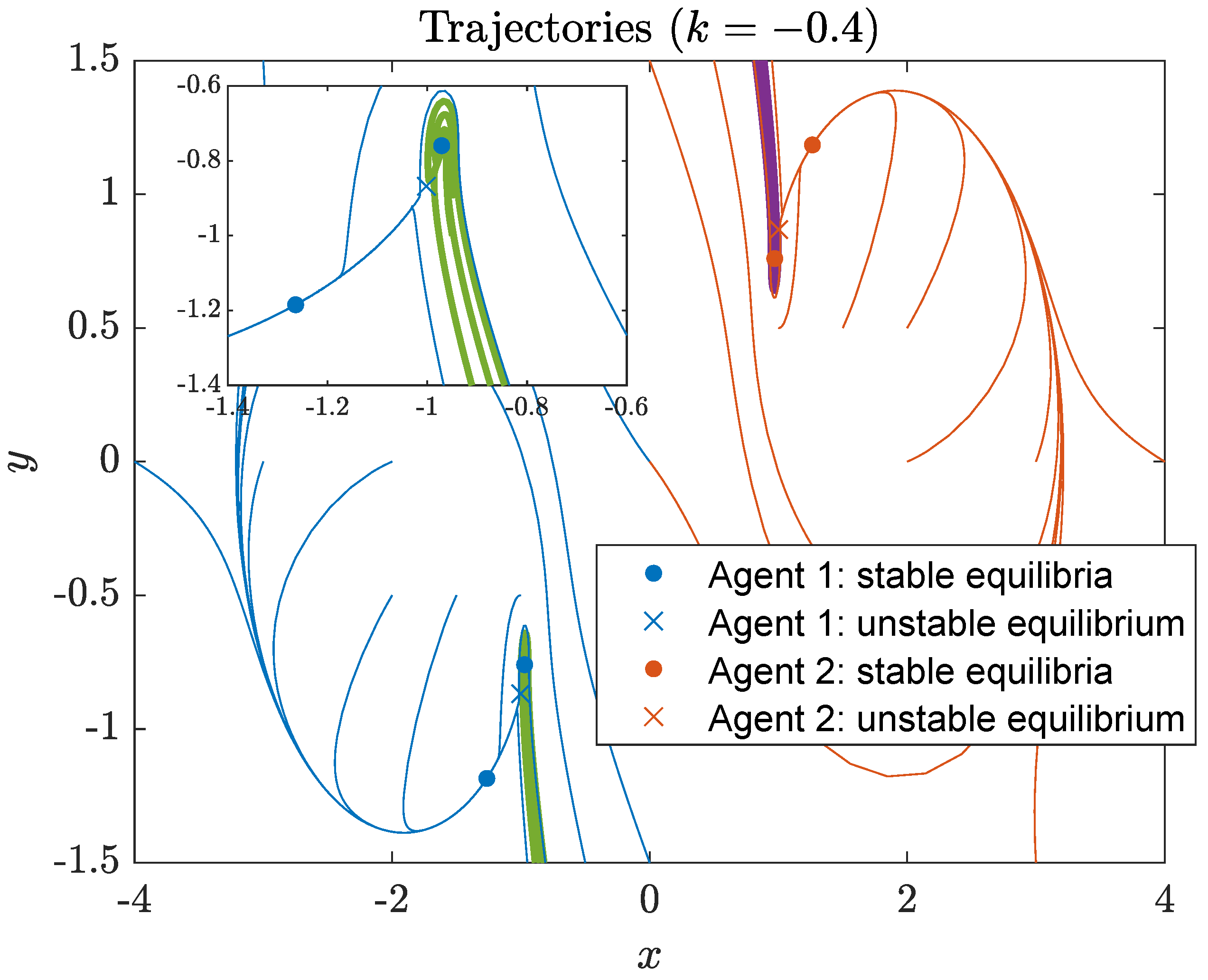
It is observed that some combination of
k and
results in a system that contains more than one stable equilibrium points. This combination of
is located in the intersection of (
16), (
17), and (
24). This region is characterized by three intersection points:
,
, and
. The first intersection point is the pivot point discussed in (
16) and (
17), the second intersection point is the as mentioned in the previous paragraph, and the last intersection point is the intersection of
and
. Note that the last intersection point corresponds to the cusp in
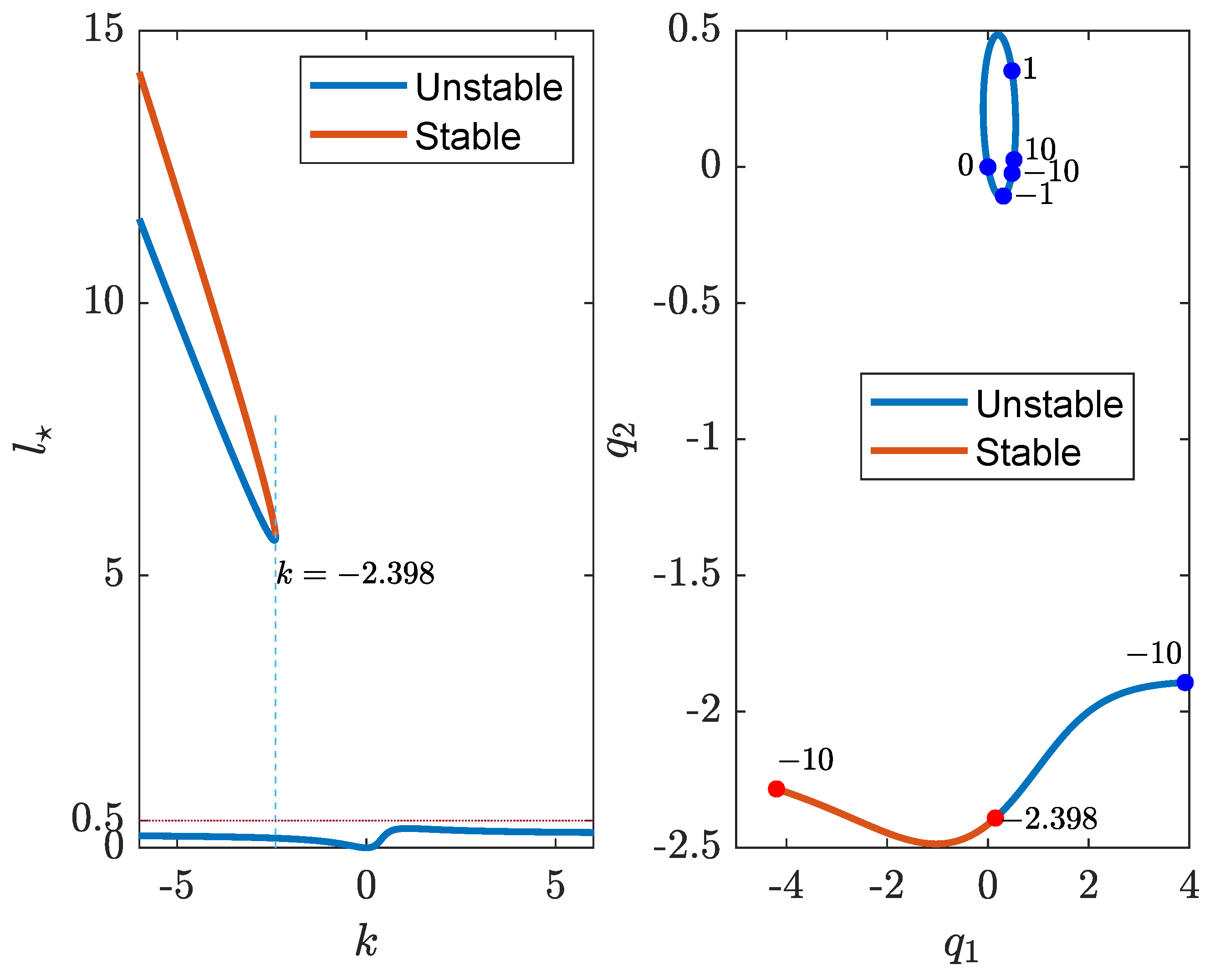
Figure 2. The region is marked in red in
Figure 4 in which the combination of
k and
results in two stable equilibrium points. As an example, the point
results in a system with two stable equilibrium points. The first stable equilibrium point is characterized by
,
, and the eigenvalues are
,
,
, and
. The eigenvalues of the second stable equilibriums point are located at
and
with
and
. Therefore, the behavior of the agents may be highly complex if the parameters are selected to be around this region.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}