1. Introduction
The transportation sector is undergoing a radical transformation with the emergence of autonomous vehicles (AV), which offer many benefits, such as reducing accidents, enhancing mobility, and saving lives [
1]. However, a major challenge is to ensure the safety and reliability of AVs, which face various difficulties in their operation. AVs must deal with complex and dynamic road situations requiring high-level decision-making and coordination. Furthermore, AVs are exposed to the risk of misinformation attacks that can tamper with their sensors and communication systems. Therefore, it is vital to develop efficient methods to verify the correctness and security of AVs under different conditions and scenarios.
One of the main issues related to AVs is their ability to handle complex road situations, such as crowded urban intersections, unpredictable pedestrian behavior, and harsh weather conditions [
2]. These situations require AVs to make quick decisions based on a large amount of sensory data, such as camera images, radar signals, and lidar scans [
3]. The complexity of these situations and the possibility of misinterpretations highlight the need for strong verification mechanisms to validate the decision-making processes of AVs [
4].
Another important challenge stems from the vulnerability of AVs to misinformation, both deliberate and accidental [
5]. Malicious actors could exploit weaknesses in AV systems to manipulate their sensors or inject false data, potentially leading to disastrous accidents. Accidental misinformation could result from errors in data collection or processing, introducing inaccuracies that could jeopardize the safety of AV operations [
6]. Addressing these challenges requires a comprehensive approach that includes strong cybersecurity measures, rigorous data validation protocols, and continuous monitoring of AV performance [
7].
The manuscript is organized to thoroughly address the evolving landscape of autonomous vehicles (AVs) with a primary focus on safety implications for pedestrians and passengers. The introduction sets the context by emphasizing the transformative potential of AVs and introduces the main concern of safety in the face of complex road scenarios and misinformation threats. The literature review surveys recent developments in AV technology and examines existing studies on safety concerns, establishing the need for a strong verification mechanism. A detailed case study scenario is presented to illustrate the challenges faced by AV, emphasizing the potential impact of misinformation on decision-making.
The conceptual framework section explains the integration of the stop, investigate the source, find better coverage, and trace claims (SIFT) method into AV safety protocols, providing a theoretical basis for its application. Challenges and opportunities in implementing the SIFT method are discussed, highlighting real-time processing challenges and opportunities for refinement. The conclusion synthesizes key findings and underscores the significance of the SIFT method in addressing AV safety concerns, while the future directions section suggests avenues for further research, including ongoing refinement of the SIFT method and collaborative efforts to establish standardized safety protocols for the automotive industry. The manuscript is supported by a solid reference section, grounding the analysis in existing scholarship and research.
This article aims to explore the application of the SIFT method to enhance AV safety protocols. The objective is to investigate how the SIFT method can be leveraged to improve the reliability and trustworthiness of AV systems, particularly in complex traffic scenarios. The scope of this research includes examining the conceptual framework of the SIFT method, its potential benefits in AV safety, and its implications for the development of more robust and secure AV systems.
This paper is organized into seven sections, providing a comprehensive exploration of the role of SIFT in AVs. The introduction sets the stage, followed by a thorough literature review of existing research on AVs in
Section 2. A case study is then presented to illustrate the practical implementation of AV safety using SIFT in
Section 3. The conceptual framework section, which outlines the key components and mechanisms involved in integrating the SIFT method into AV safety, is described in
Section 4. The challenges and limitations of AV are discussed in
Section 5, followed by an examination of the promising potentials and future directions of this field in
Section 6. Finally, the conclusion summarizes the key findings and implications of the research in
Section 7. The list of abbreviations and acronyms used in this study can be found in
Appendix A,
Table A1.
2. Literature Review
AVs are vehicles that can drive themselves without human intervention, using sensors, cameras, artificial intelligence, and other technologies to sense and navigate the environment. AVs have the potential to enhance road safety, mobility, efficiency, and sustainability, as well as to decrease traffic congestion, fuel consumption, and emissions [
8]. However, AVs also encounter many technical, ethical, and social challenges that need to be resolved before they can be widely adopted and trusted by the public. In this study, we will review several of the recent developments in AV technology, discuss the features that contribute to safety and efficiency, and evaluate the existing studies on AV safety concerns, emphasizing the importance of addressing misinformation [
9]. One of the major developments in AV technology is the creation of high-performance computing platforms that can process large amounts of data from multiple sensors and cameras, and run complex algorithms and machine-learning models to enable real-time decision-making and control [
10].
For example, NVIDIA’s DRIVE (Santa Clara, CA, United States) platform is a scalable and modular system that can support various levels of automation, from driver assistance to fully autonomous driving [
11]. The platform integrates hardware, software, and cloud services to provide a comprehensive solution for AV development and deployment. Another important development in AV technology is the improvement of sensor fusion and perception capabilities, which enable AVs to detect and recognize objects, lanes, traffic signs, and signals, and to estimate their position, speed, and orientation [
12]. Sensor fusion is the process of combining and integrating data from different sensors, such as cameras, radars, lidars, and ultrasonic sensors, to create a more accurate and robust representation of the surrounding environment. Perception is the process of interpreting and understanding the sensor data and generating a semantic map that can be used for planning and control. For example, Waymo’s AVs use a combination of sensors and deep neural networks to perceive and classify various road agents, such as vehicles, pedestrians, cyclists, and animals, and to predict their future behavior and intentions [
13,
14].
A third significant development in AV technology is the enhancement of communication and coordination capabilities, which enable AV to exchange information and cooperate with other vehicles, infrastructure, and road users. Communication and coordination can improve the safety, efficiency, and reliability of AVs, as well as their social acceptance and integration (see
Figure 1). For example, vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication can enable AVs to share their location, speed, direction, and intention, and to receive traffic and road condition information, such as traffic lights, speed limits, and road hazards [
15,
16]. Vehicle-to-pedestrian (V2P) and vehicle-to-everything (V2X) communication can enable AVs to interact and negotiate with pedestrians, cyclists, and other road users, and to use external signals, such as sounds, lights, and gestures, to convey their actions and intentions. Despite these developments, AV technology still faces many safety challenges and concerns, such as dealing with complex and dynamic road situations, ensuring the reliability and security of the systems, and addressing the ethical and legal implications of the technology [
17,
18].
Moreover, AV technology is also vulnerable to misinformation attacks, which are strategic deception campaigns that involve media manipulation and internet manipulation to disseminate misleading information, aiming to confuse, paralyze, and polarize an audience [
19]. Misinformation attacks can undermine the trust and confidence in AV technology and pose threats to democratic governance and the integrity of electoral processes. Therefore, it is essential to develop efficient methods to verify the correctness and security of AVs under various conditions and scenarios and combat the misinformation and disinformation campaigns that target AV technology and its stakeholders [
20].
The literature review explores recent advancements in AV technology, highlighting their potential benefits, such as enhanced safety and efficiency, while addressing associated challenges. Key developments include high-performance computing platforms, improved sensor fusion and perception capabilities, and enhanced communication and coordination features. Despite progress, safety concerns persist, compounded by the threat of misinformation attacks. We propose a novel conceptual framework and case study scenario to illustrate AV challenges, emphasizing the impact of misinformation on decision-making. Additionally, we advocate for the integration of the SIFT method into AV safety protocols, discussing implementation challenges and opportunities for refinement. This research presents a pioneering effort to address AV safety and misinformation concerns comprehensively.
4. Conceptual Framework: Integrating the SIFT Method into AV Safety Protocols
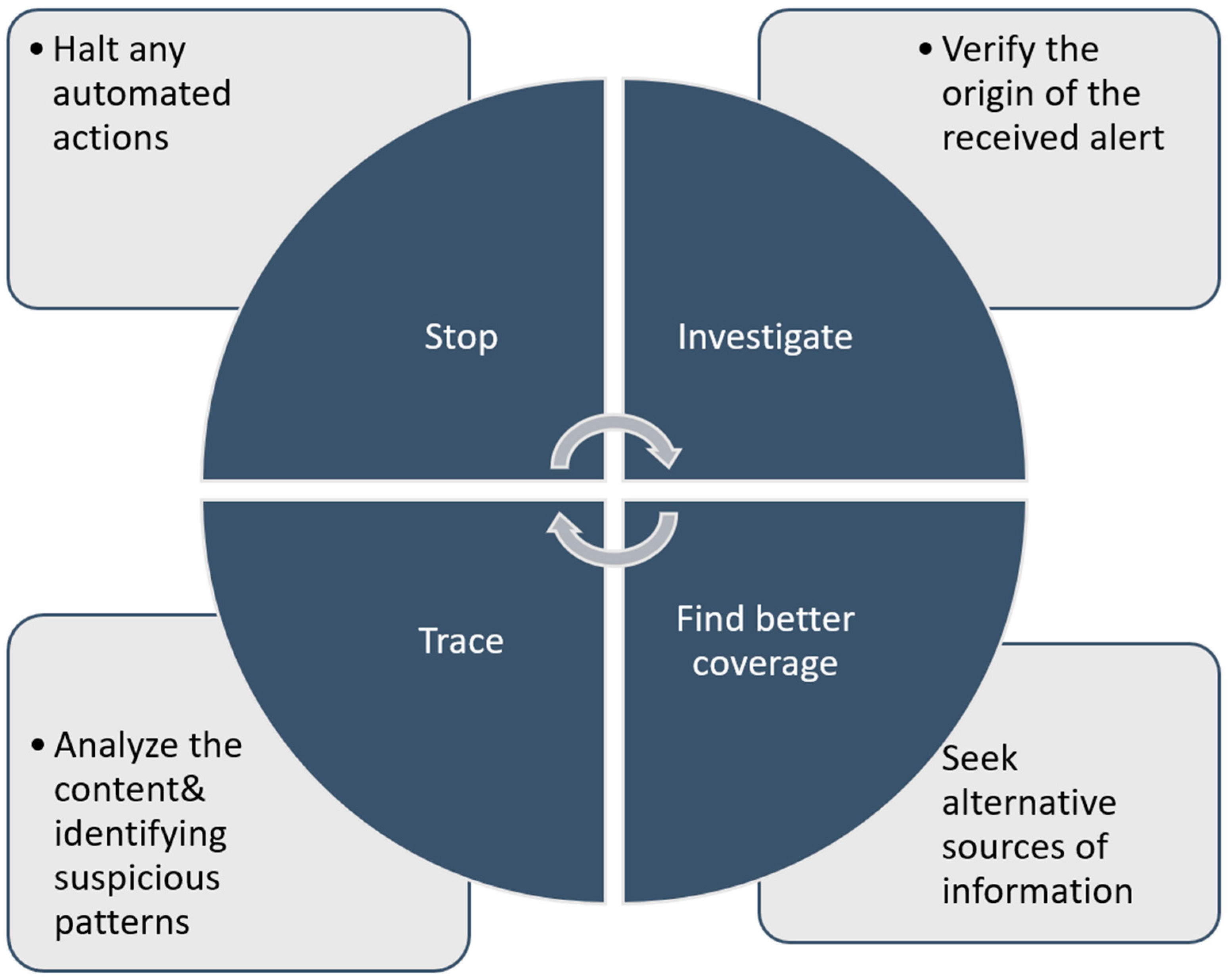
An AV is navigating along a highway when it receives a fake news alert indicating an impending road closure. The AV, designed to prioritize safety, reacts by slowing down and eventually coming to a complete stop, triggering an unnecessary traffic jam. The SIFT method is a short list of four moves to verify the reliability of a source of information before using it in your research. The SIFT method is a technique that can be integrated into AV safety protocols to prevent misinformation or fake news from affecting the AV’s decision-making and behavior. The following diagram illustrates how the SIFT method can be applied in the scenario of an AV receiving a deceptive fake news alert indicating an impending road closure. To integrate the SIFT method into AV safety protocols to effectively combat misinformation and ensure seamless autonomous driving operations (see
Figure 2).
Stop: When AV receives a potentially misleading alert, it should stop any automated actions based on the alert. This temporary pause allows for a more in-depth investigation of the information’s validity. AVs should not immediately react to the information, but pause and check its emotions and biases. The AV should ask itself whether it knows the information source and if it has any information about the claim’s credibility or the website’s reputation. If not, the AV should use the other moves to evaluate the information.
Investigate: The AV should use its network connectivity and access to reputable news sources to verify the origin of the received alert. This involves cross-checking the information with multiple sources and identifying the credibility of the source. The AV should investigate the source of the information and consider the creator’s expertise and agenda. The AV should look at what others have said about the source and compare it with other sources that are known to be reliable and trustworthy. AVs should also check the date and timeliness of the information and see if it is consistent with the current situation and context.
Find Better Coverage: The AV should actively look for alternative sources of information to corroborate or refute the received alert. This may involve accessing real-time traffic updates, consulting official traffic advisories, or engaging with other connected vehicles. AVs should look for better or other coverage of the same claim or topic and see if there is a consensus or a controversy among different sources. The AV should also look for sources that provide evidence, data, and analysis to support or refute the claim and avoid sources that rely on opinions, emotions, and anecdotes. AVs should also be aware of the quality and diversity of the sources and avoid sources that are biased, incomplete, or misleading.
Trace: AVs should analyze the content of the received alert, identifying any suspicious patterns, inconsistencies, or grammatical errors. This can help flag potential misinformation and inform further investigation. AVs should trace the information back to the original source and see the original context and purpose of the information. The AV should also verify the accuracy and validity of the information and see if it has been altered, manipulated, or fabricated. The AV should also consider the implications and consequences of the information and see if it is relevant, useful, and ethical for the AV’s goals and tasks.
A sample scenario for AVs is navigating through a busy city street when it encounters a situation that requires it to make a critical decision. The vehicle’s sensors detect a pedestrian crossing the street outside of a designated crosswalk. The vehicle’s software must quickly assess the situation and determine the appropriate course of action.
Stop: The autonomous vehicle’s system immediately stops the vehicle to avoid a potential collision with the pedestrian. This is a crucial first step in the SIFT process, as it ensures the safety of the situation before proceeding.
Investigate the source: The vehicle’s sensors and cameras begin to gather information about the situation. It checks the status of the pedestrian, the traffic around the area, and any other relevant data to understand the context of the event.
Find better coverage: The vehicle’s system searches for additional sources of information, such as nearby security cameras or crowd-sourced data, to get a more comprehensive understanding of the situation. This helps the vehicle make a more informed decision.
Trace claims, quotes, and media to the original context: The vehicle’s system cross-references the information it has gathered with any available data, such as traffic reports, social media posts, or news articles, to trace the claims and validate the information. This ensures that the vehicle’s decision is based on reliable and accurate data.
Based on the information gathered through the SIFT process, the AV’s software can then make a decision on how to proceed, such as yielding to the pedestrian, adjusting its speed, or even communicating with the pedestrian to coordinate a safe crossing.
This SIFT-based scenario shows how an AV can utilize a structured approach to gather and analyze information, ensuring that its decision-making process is informed, and reliable, and ultimately prioritizes the safety of all road users.
Figure 3 shows the conceptual framework of implementing the SIFT method, consisting of information inflow, SIFT method application, decision modulation, communication protocols, continuous monitoring and learning, and the hybrid human–AV collaboration. The inclusion of the hybrid element is necessary due to the inherent nature of AVs, which are typically designed to make decisions in simple and straightforward scenarios. Therefore, in complex scenarios requiring quick and precise decisions, human input becomes essential to supplement the AV’s decision-making process.
Information inflow: In the proposed conceptual framework, the information inflow component acknowledges the continuous stream of data received by the AV from various sensors, communication systems, and external sources, including the infotainment system. This stage marks the initiation of potential misinformation entry points into the AV system.
SIFT Method Application: As deceptive information is detected, the SIFT method becomes a crucial layer in the AV’s decision-making process. The stop, investigate the source, find better coverage, and trace claims steps are systematically applied. AVs are programmed to halt immediate reactions, initiate an investigation into the source of the information, cross-reference data with multiple reliable sources, and verify the claims against a comprehensive database of accurate road conditions.
Decision Modulation: Following the application of the SIFT method, the decision modulation phase involves adapting the AV’s response based on the verified information. This step ensures that the AV makes decisions aligned with accurate data, mitigating the risk of unwarranted slowdowns or stops caused by misinformation. This adaptive approach safeguards the overall traffic flow and prevents unnecessary disruptions.
Communication Protocols: To further fortify AV safety protocols, effective communication protocols are established. This involves the transmission of verified information not only to the AV itself but also to other vehicles in the vicinity. This proactive sharing of accurate data contributes to collective awareness, preventing the spread of misinformation-induced disruptions throughout the traffic ecosystem.
Continuous Monitoring and Learning: The framework incorporates continuous monitoring and learning mechanisms, allowing AVs to adapt to evolving challenges. The system continuously refines its response strategies based on real-time data, user feedback, and the efficacy of previous decisions. This iterative learning process enhances the resilience of AVs against emerging threats, such as deceptive information.
Human–AV Collaboration: Acknowledging the role of human drivers in mixed traffic scenarios, the human–AV collaboration element fosters communication between AVs and human-driven vehicles. This collaborative approach ensures that human drivers are aware of the AV’s verified information, promoting smooth interaction and preventing the worsening of traffic congestion caused by misinformation-induced reactions.
The AV can avoid being misled by misinformation or fake news and make informed and rational decisions that enhance its safety and performance by leveraging the SIFT method. This methodology equips the AV with robust mechanisms to scrutinize and validate incoming information, discerning reliable sources from potentially deceptive ones. By employing the SIFT method, the AV can effectively sift through a plethora of data points, ensuring that only accurate and pertinent information informs its decision-making process. Consequently, this empowers the AV to navigate complex road scenarios with heightened discernment, minimizing the risk of erroneous actions caused by misleading information.
Moreover, the application of the SIFT method extends beyond individual AVs, fostering a networked environment where vehicles can communicate and coordinate seamlessly. Through the SIFT framework, AVs can exchange verified information with one another, facilitating collaborative decision-making and enhancing overall road safety. Furthermore, the SIFT method enables AVs to interact with human drivers and other road users in a transparent and trustworthy manner. By providing reliable insights and maintaining open lines of communication, AVs can build trust and confidence among stakeholders, fostering acceptance and integration of AV technology into the broader transportation ecosystem.
5. Challenges
Challenges facing the rapid evolution of AVs has triggered a wave of anticipation and excitement, holding the promise of a safer, more efficient, and more accessible transportation system. However, this transformative technology is not without its challenges, particularly in ensuring the robustness and safety of AVs in complex and unpredictable real-world driving environments. Robust verification mechanisms are essential to address the challenges posed by complex road scenarios and the vulnerability of AVs to misinformation.
These mechanisms should encompass a comprehensive approach that includes rigorous testing, validation, and certification procedures. Extensive simulations and real-world testing are essential to evaluate the performance of AVs in a wide range of scenarios, including challenging and unpredictable environments. Additionally, robust cybersecurity measures are necessary to protect AV systems from cyberattacks and misinformation. By employing advanced encryption techniques and access control protocols, AV systems can be safeguarded against unauthorized access and manipulation of critical data. Moreover, educating the public about the limitations and potential risks of AV technology is essential to foster trust and responsible use.
The SIFT method, a valuable technique for verifying the reliability of information sources, introduces challenges within the context of AV safety. One notable challenge is real-time processing, as the method requires the AV to perform multiple steps, such as investigating the source and tracing claims, which may consume time and computational resources. In scenarios demanding quick decision-making, the AV must navigate the trade-off between speed and accuracy, prioritizing the most relevant and urgent information sources. Another challenge involves adapting to dynamic road conditions. The SIFT method requires considering the context and situation of information, but the unpredictable nature of road conditions, including traffic flow and weather, necessitates the AV’s ability to swiftly adapt and update its verification results.
Seamless integration with existing AV systems is a crucial consideration for implementing the SIFT method. Compatibility with perception, decision-making, and communication modules without compromising safety standards poses a significant challenge, requiring a careful balance to avoid disruptions to the AV’s core functions. Additionally, the method must contend with the challenge of processing a high volume of information generated by sensors and communication systems in AVs. Efficient algorithms and optimized processing capabilities are essential to manage this data load while maintaining computational efficiency.
Misinformation comes in diverse forms, including text, images, and multimedia content, posing a challenge for the primarily digitally-focused SIFT method. Adapting to these various misinformation sources and developing algorithms capable of identifying and verifying misinformation in different formats is essential, given the evolving tactics employed by malicious actors. Furthermore, the success of the SIFT method hinges on user understanding and acceptance. Convincing stakeholders within the AV industry and the general public of its effectiveness and fostering trust are crucial steps in ensuring successful implementation. Overcoming skepticism and building confidence in the method’s capabilities are integral to its adoption.
Lastly, ethical and legal considerations emerge with the implementation of the SIFT method. As this method involves the collection and analysis of vast amounts of data, privacy concerns become paramount. It is essential to ensure responsible information use, requiring a meticulous delineation of verification boundaries and strict adherence to data protection regulations. This includes obtaining informed consent from individuals whose data is being utilized and implementing robust security measures to safeguard sensitive information from unauthorized access or misuse. Striking a delicate balance between effectively preventing misinformation and upholding privacy rights is imperative for the ethical deployment of the SIFT method in the context of AV safety. This entails transparent communication with stakeholders about data collection and usage practices, as well as ongoing monitoring and assessment of ethical implications to ensure alignment with societal values and legal frameworks.





 ,
, 

{kind=link}
{kind=link}
{kind=link}