
A Dynamic Event-Triggered Secure Monitoring and Control for a Class of Discrete-Time Markovian Jump Systems: A Plug-and-Play Architecture

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Markovian jump systems pose significant challenges for attack monitoring and control due to their stochastic nature and abrupt structural changes. The primary challenge can be divided into two parts: first, designing an event-triggered estimator capable of simultaneously reconstructing system states and estimating attack signals; and second, developing an attack-tolerant controller to ensure the stability of Markovian jump systems across different operational modes, even in the presence of deception attacks.
- (2)
- Designing a dynamic event-triggered transmission mechanism with the corresponding attack estimator involves optimizing resource utilization by transmitting data only when necessary, while ensuring accurate attack estimation. A significant challenge arises from the inherent nature of event-triggered transmission, which can directly impact the real-time capabilities of attack monitoring. Unlike time-driven data transmission, event-triggered schemes may introduce delays or missed detections, potentially compromising the ability of the attack detector to respond promptly to attacks.
- (3)
- The third challenge focuses on constructing a PnP monitoring and control framework that can be integrated seamlessly into existing Markovian jump systems without modifying their original control structure. This involves designing PnP modules for attack detection and attack-tolerant control that can be independently developed and easily incorporated. The challenge lies in ensuring that the integration can not disrupt the existing nominal controller while enhancing the security of system.
- (1)
- A new attack reconstruction method is proposed to estimate both the system state and deception attacks. Based on this estimator, an attack-tolerant controller is designed to stabilize the considered Markovian jump systems subject to actuator attacks. Sufficient conditions for the mean-square boundedness of both estimation errors and the closed-loop system dynamics are presented and rigorously proved.
- (2)
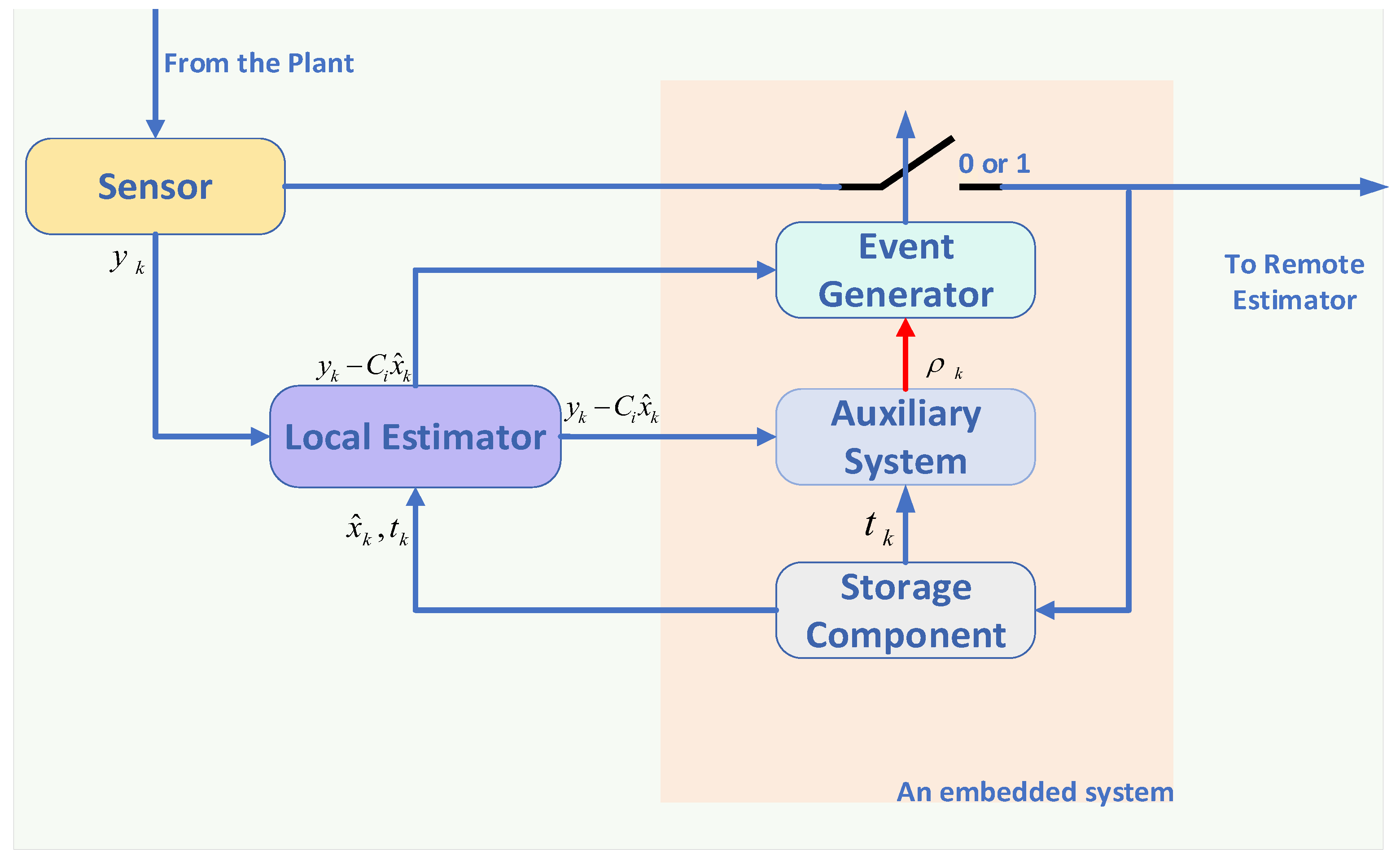
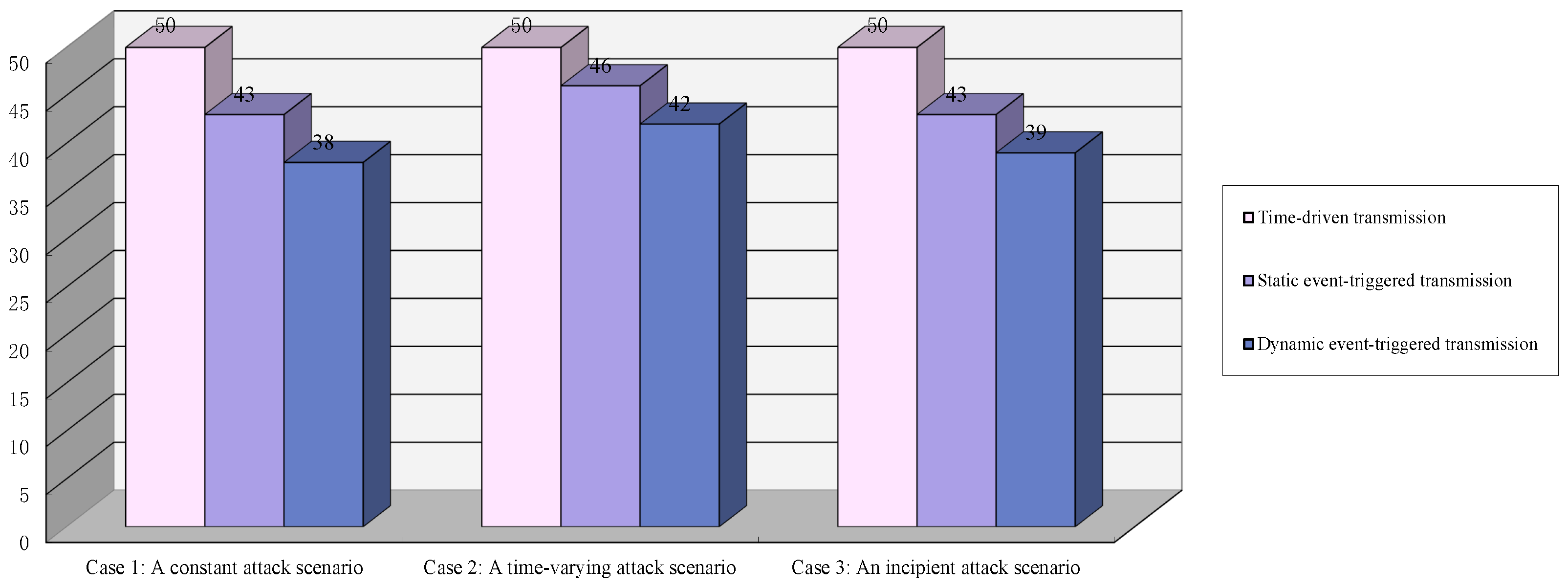
- A dynamic event-triggered transmission scheme is employed for communication between the sensor and remote estimator. This incorporates the event-triggered threshold parameter that is dynamically adjusted in order to achieve a balance between network load and the desired estimator accuracy. Furthermore, the proposed event-triggered attack monitoring strategy ensures the timely detection and alerting of deception attacks, significantly enhancing real-time monitoring capabilities.
- (3)
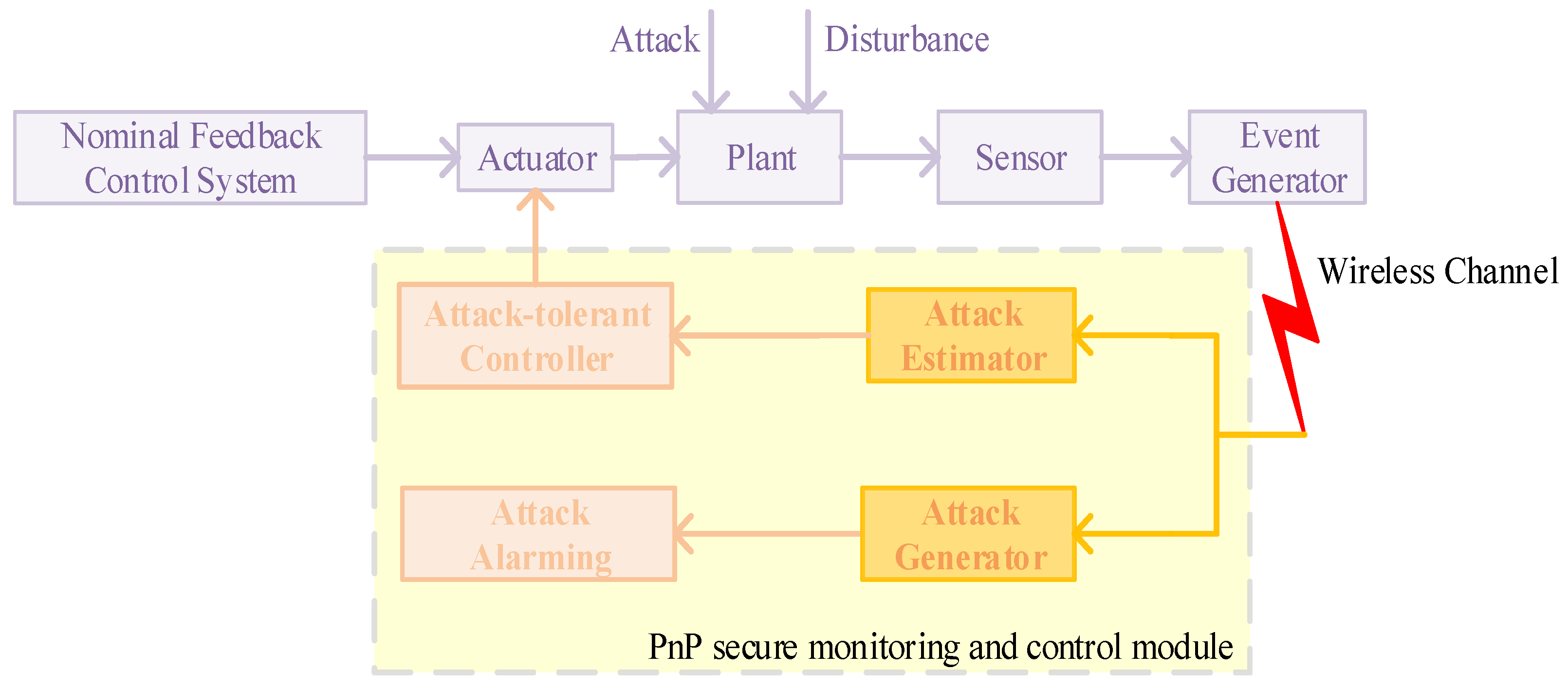
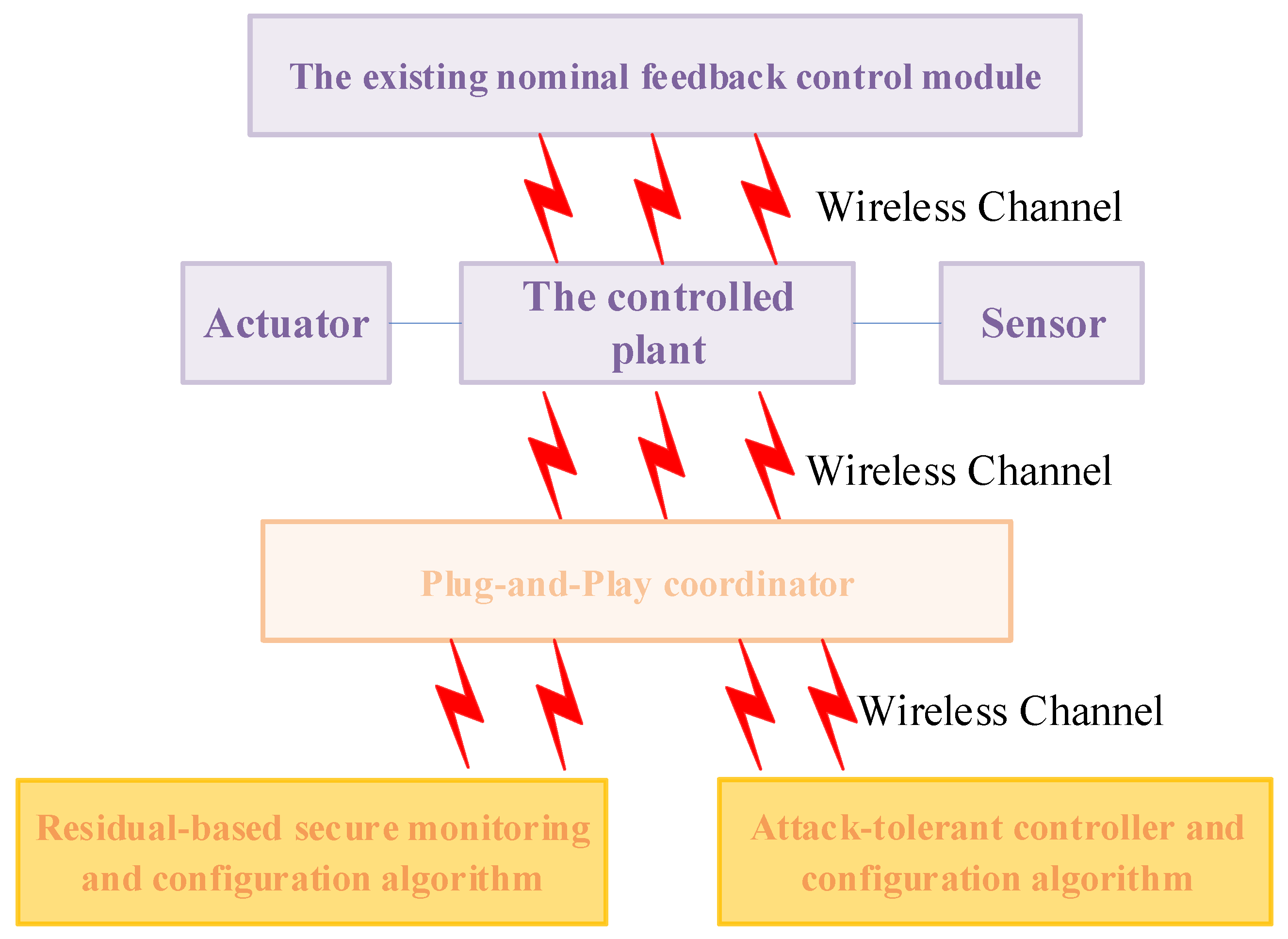
- A PnP secure monitoring and control architecture is presented in this work, which provides a reliable design approach for Markovian jump systems subject to potential deception attacks. The proposed PnP architecture is constructed to seamlessly integrate with existing control systems, enhancing system security without modifying or replacing the original control structure.
2. Model Description
3. Dynamic Event-Triggered Attack-Tolerant Control
3.1. A Dynamic Event-Triggered Sensor Data Transmission Scheme
- Case 1: For , the event generator determines that measurement information should be transmitted over the communication network, and the corresponding communication error is zero (i.e., ). Lemma 1 guarantees that . Therefore, the following inequality holds:where the initial condition .
3.2. Attack Estimator
3.3. Attack-Tolerant Controller
| Algorithm 1 Recursive algorithm of the attack estimation and attack-tolerant control |
Set the initial conditions: , , , and ;
|
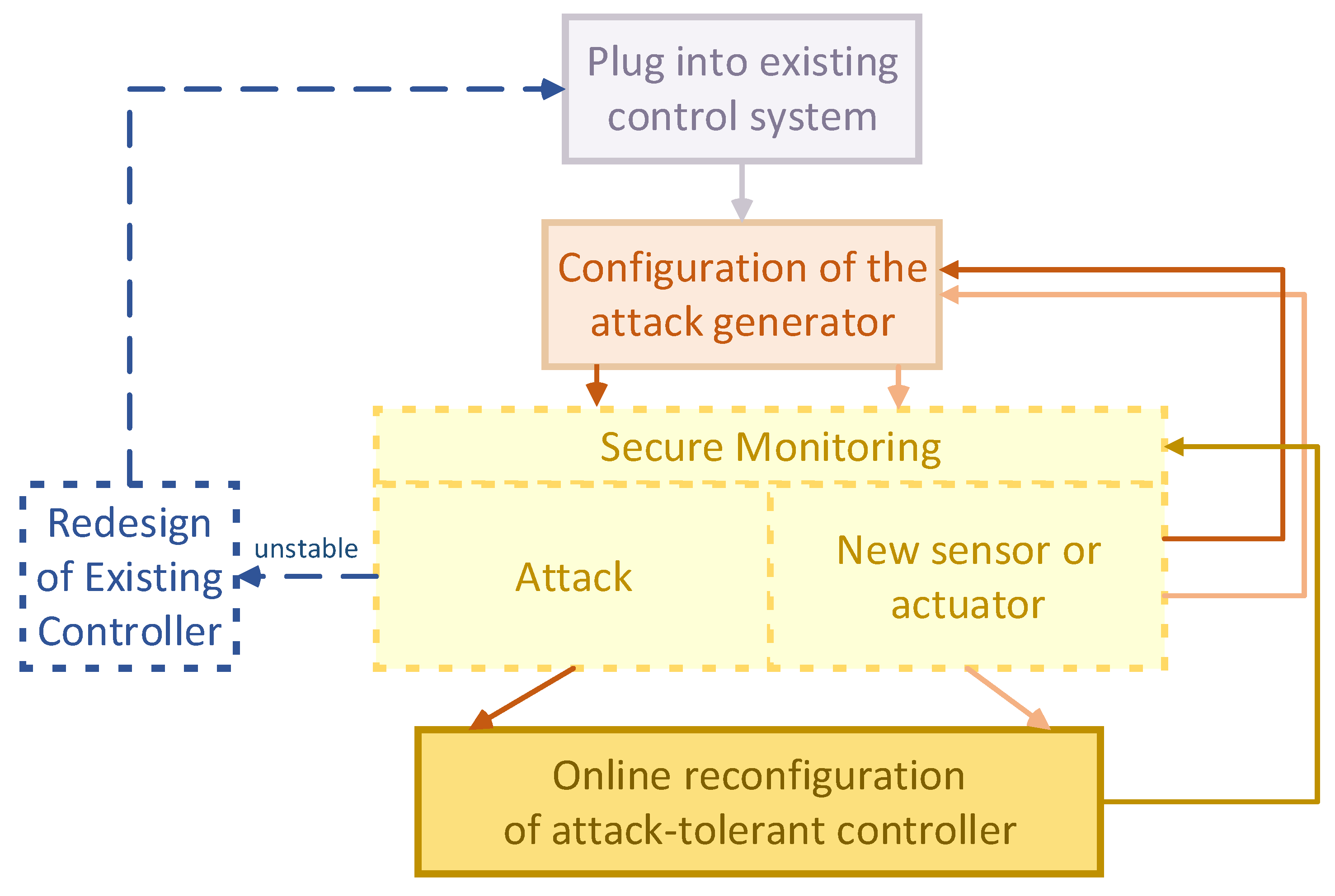
4. The Plug-and-Play Secure Monitoring and Control Architecture
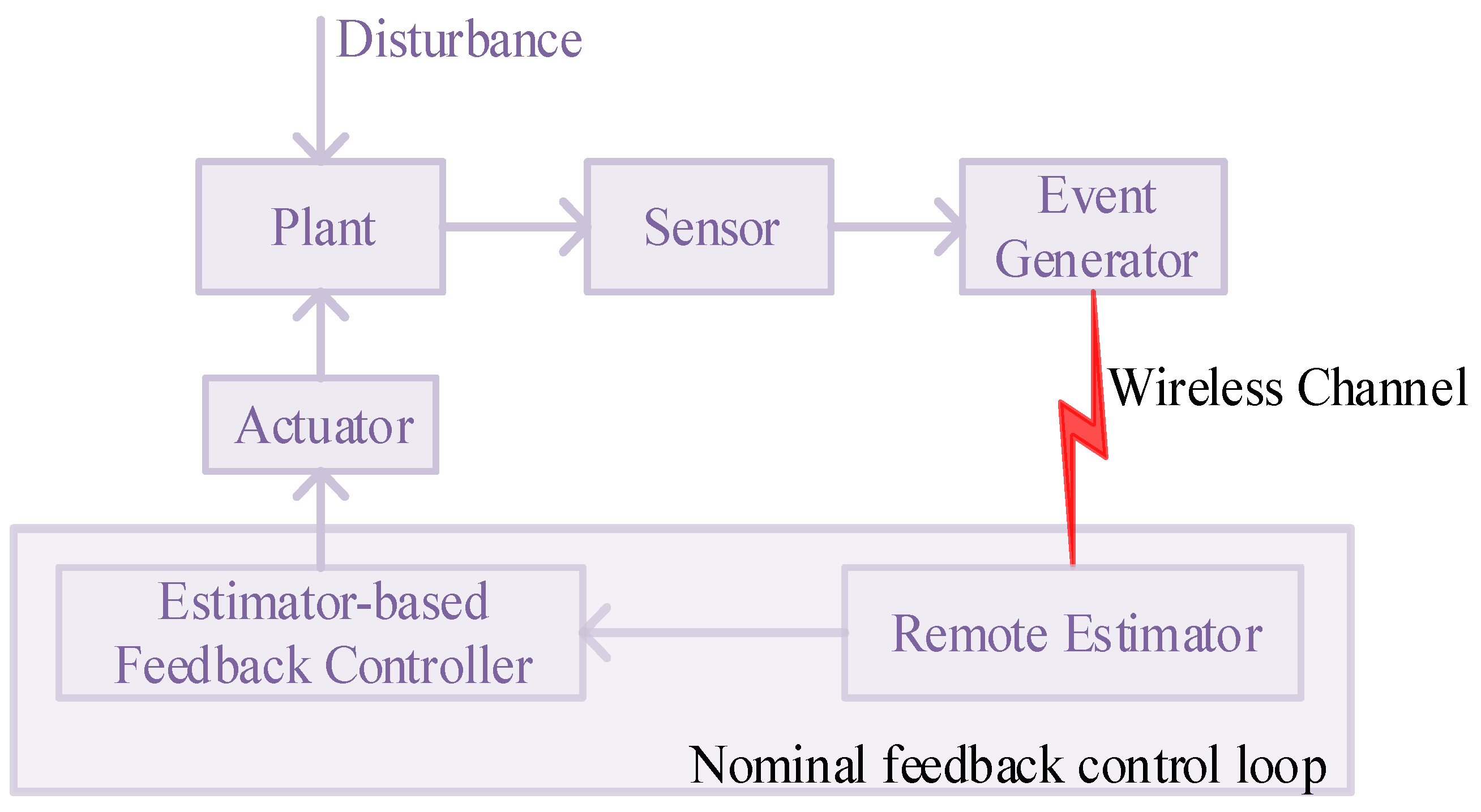
4.1. Nominal Feedback Control
4.2. Attack Monitoring Strategy
| Algorithm 2 Event-triggered attack monitoring strategy |
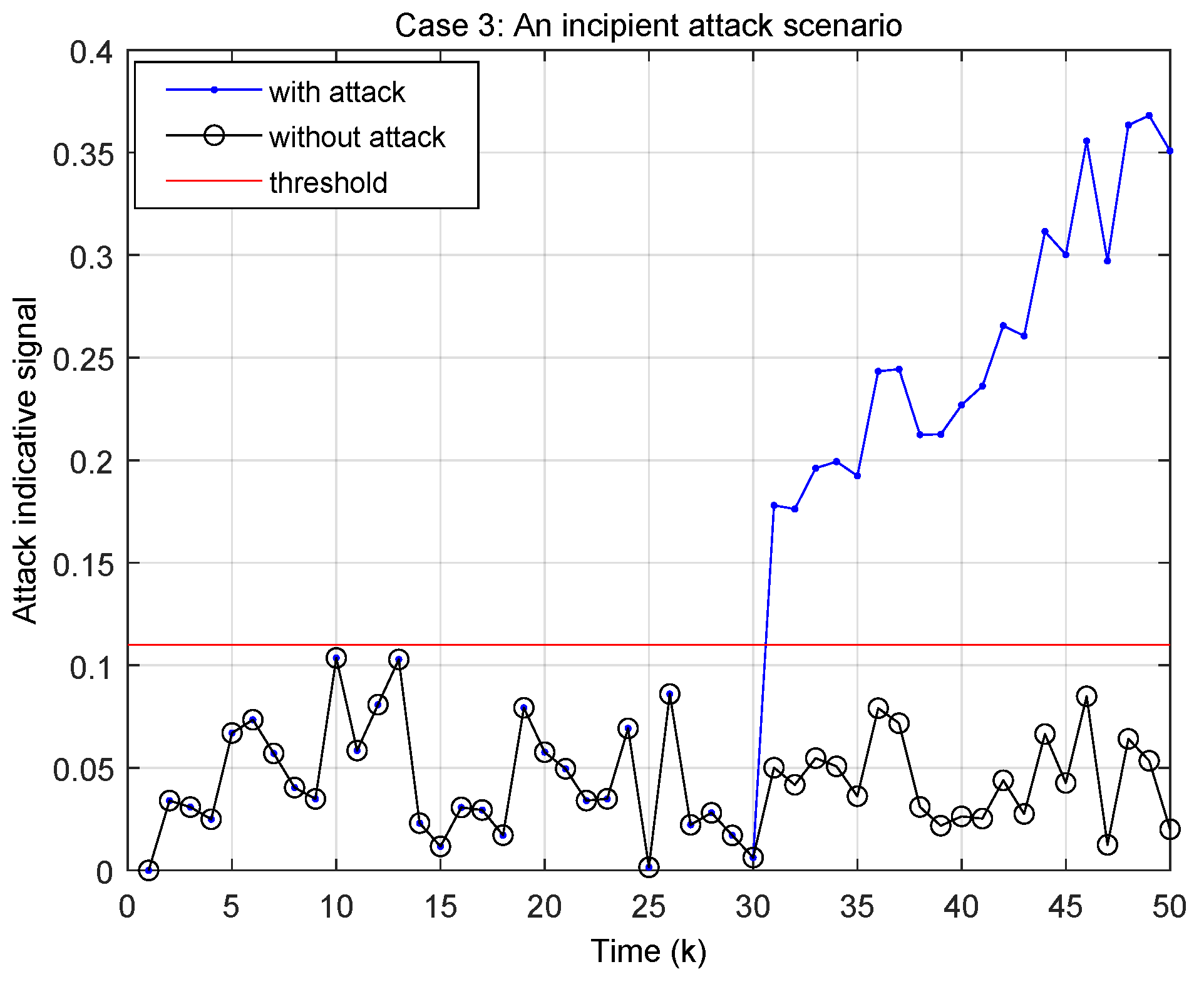
| Step 1 Estimator design: A series of state estimators, as defined in Equation (47), are designed to provide estimates of the system state . Step 2 Residual calculation: Attack residuals, denoted as , are computed based on Equation (63). A small threshold, , is established to distinguish between normal and anomalous residual values. Step 3 Attack detection: If the calculated residual is below the threshold (), the system is considered to be in an attack-free mode and no attack alarm is generated. Step 4 Event-triggered data transmission: When the attack monitor enters an attack-free mode, an event-triggered mechanism (6) determines whether to transmit sensor measurements to the remote estimator. If the event condition is met (i.e., ), data are transmitted; otherwise, data transmission is prohibited to conserve energy. Step 5 Attack alarm: If the calculated residual exceeds or equals the threshold (i.e., ), a deception attack is declared, and an attack alarm is activated. To facilitate attack detection, sensor measurements are transmitted to the remote estimator, bypassing the event-triggered condition (6). |
4.3. Plug-and-Play Operations
- (1)
- The secure monitoring and control are seamlessly integrated within a unified framework.
- (2)
- The residual-based monitoring module and the attack-tolerant controller exhibit the “plug-in” and “plug-out” ability, allowing for flexible system configuration. The design objectives for robustness and tolerance are separated: the robustness of the closed-loop can be improved through the design of , as detailed in Theorem 4, while the tolerance performance can be enhanced by designing the , as established in Theorem 2. Furthermore, the design of avoids the modification of the existing control system.
- (3)
- The architecture accommodates the integration of new sensors or actuators through straightforward reconfiguration of the “plug-in” components, preserving closed-loop stability.
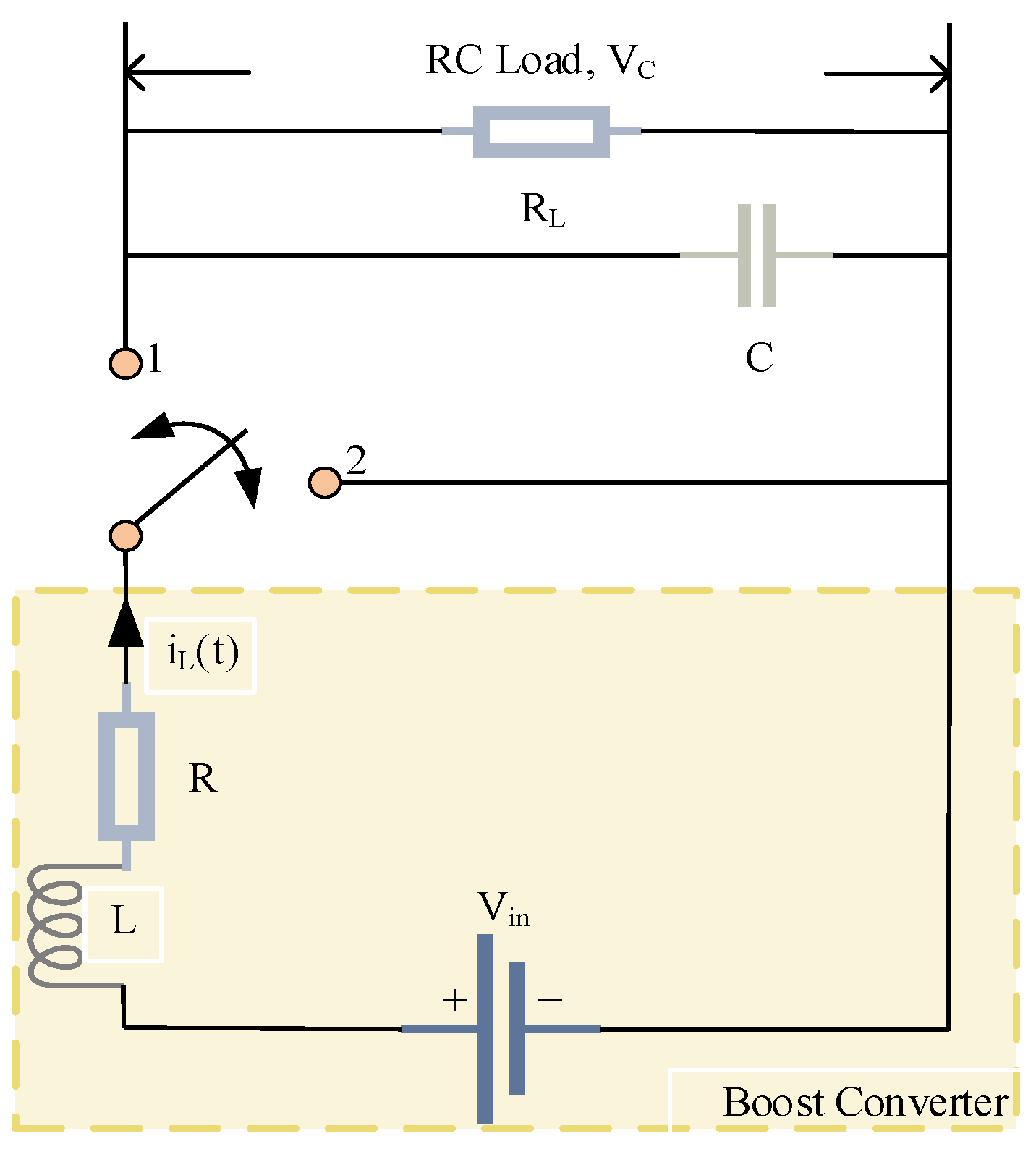
5. Case Study: PWM-Driven Boost Converter
5.1. PWM-Driven Boost Converter: Description and Modeling
- (1)
- Mode 1
- (2)
- Mode 2
- (1)
- Mode 1
- (2)
- Mode 2
5.2. PWM-Driven Boost Converter: Experimental Results and Analysis
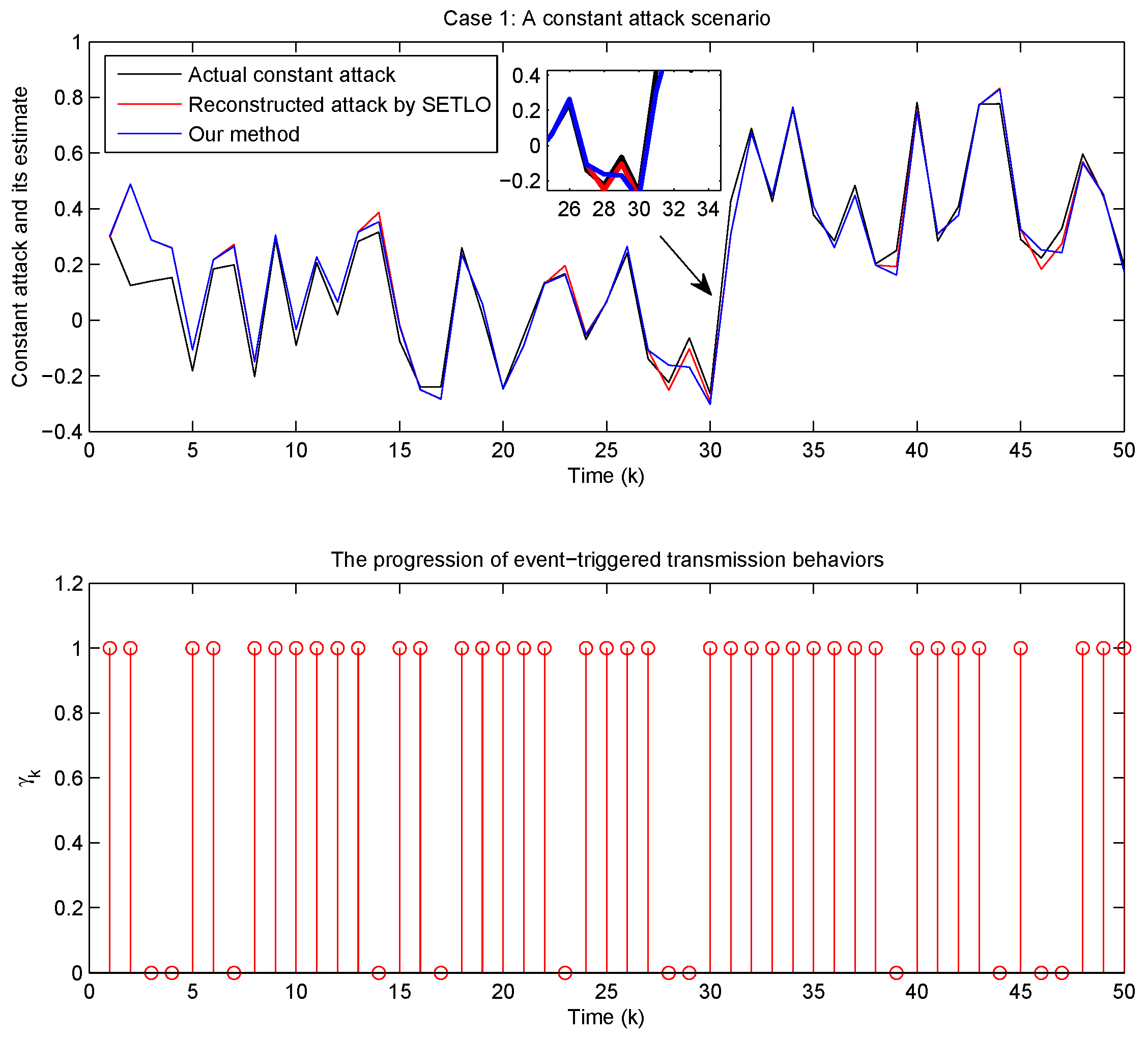
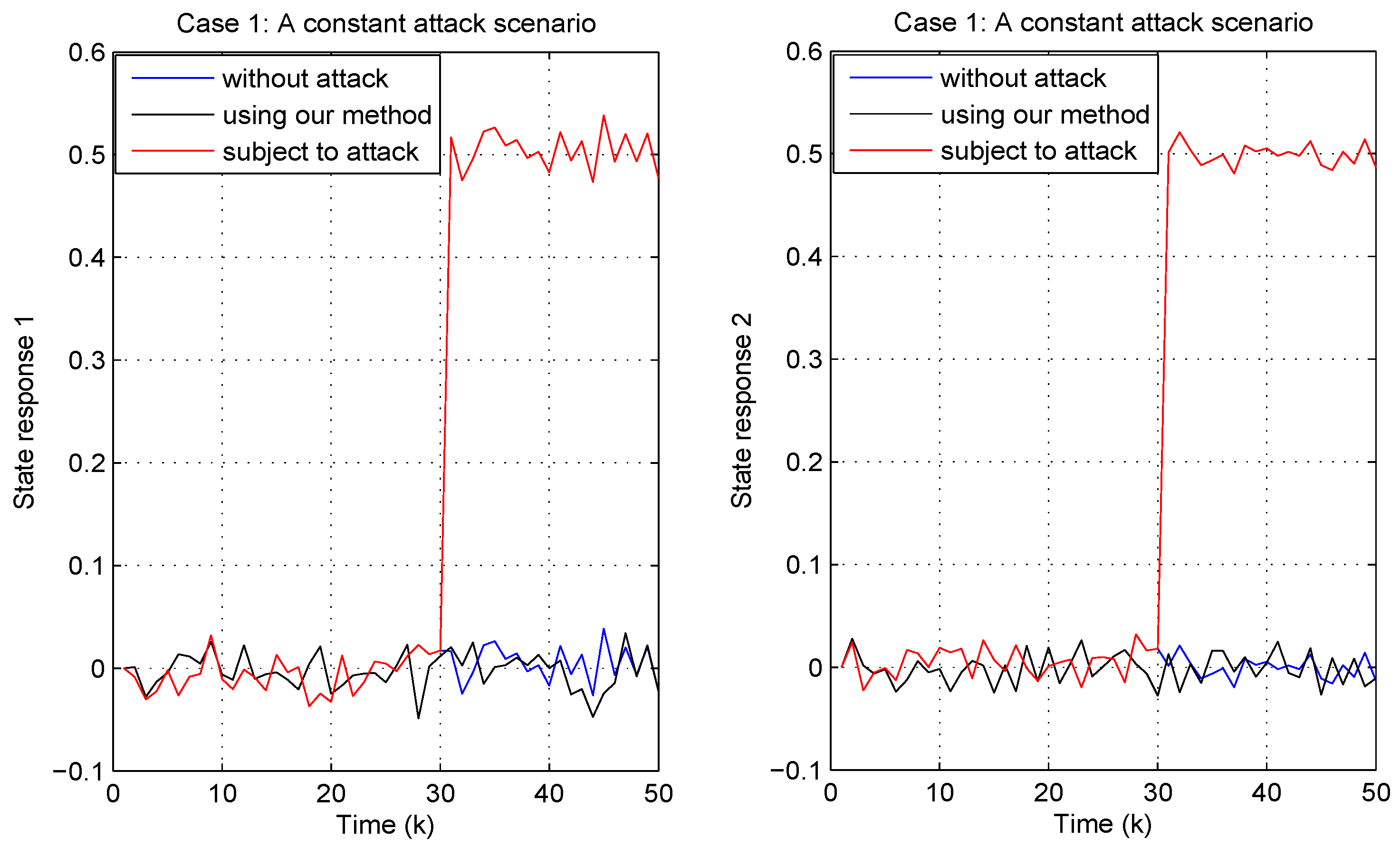
- Case 1: A constant attack scenario
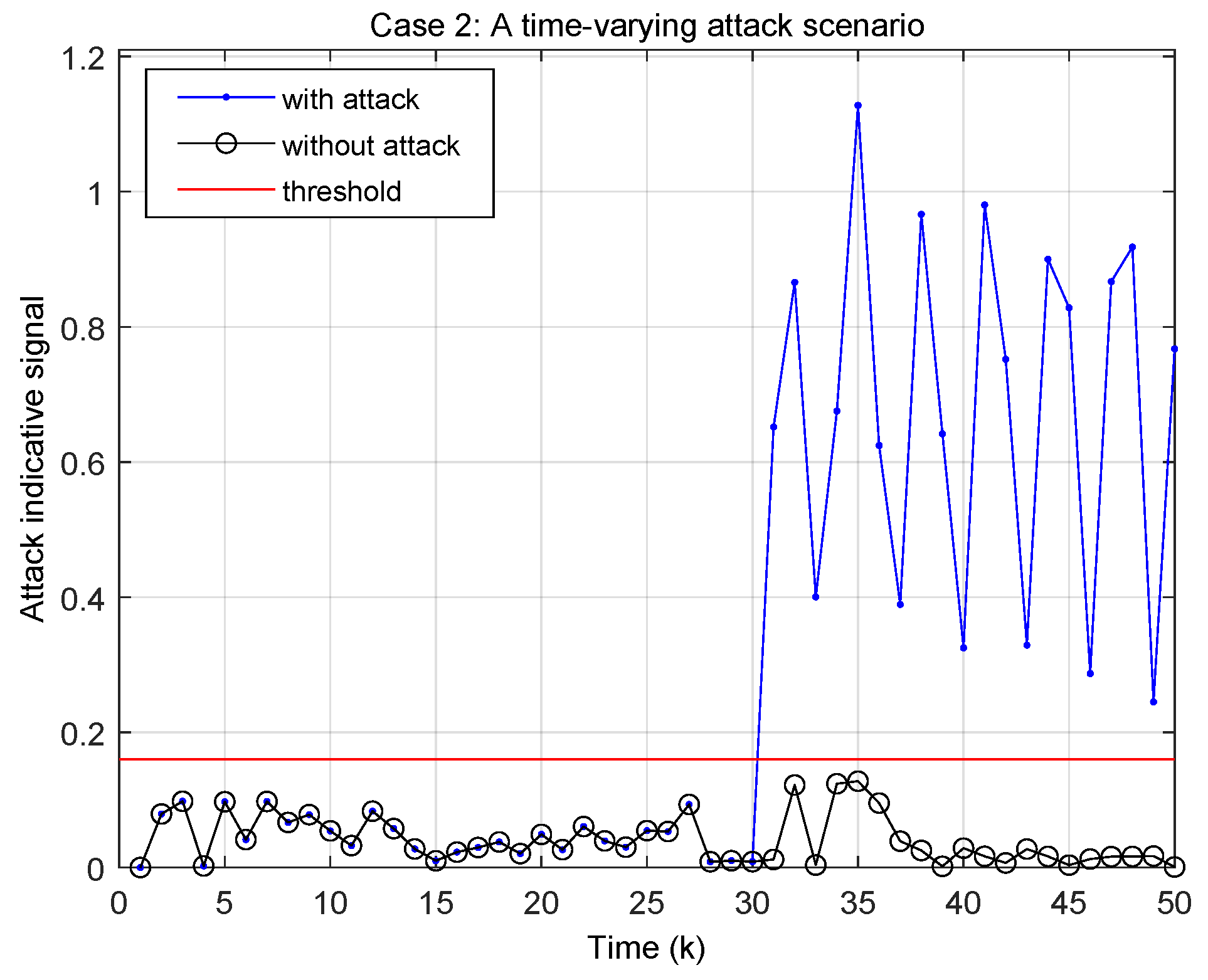
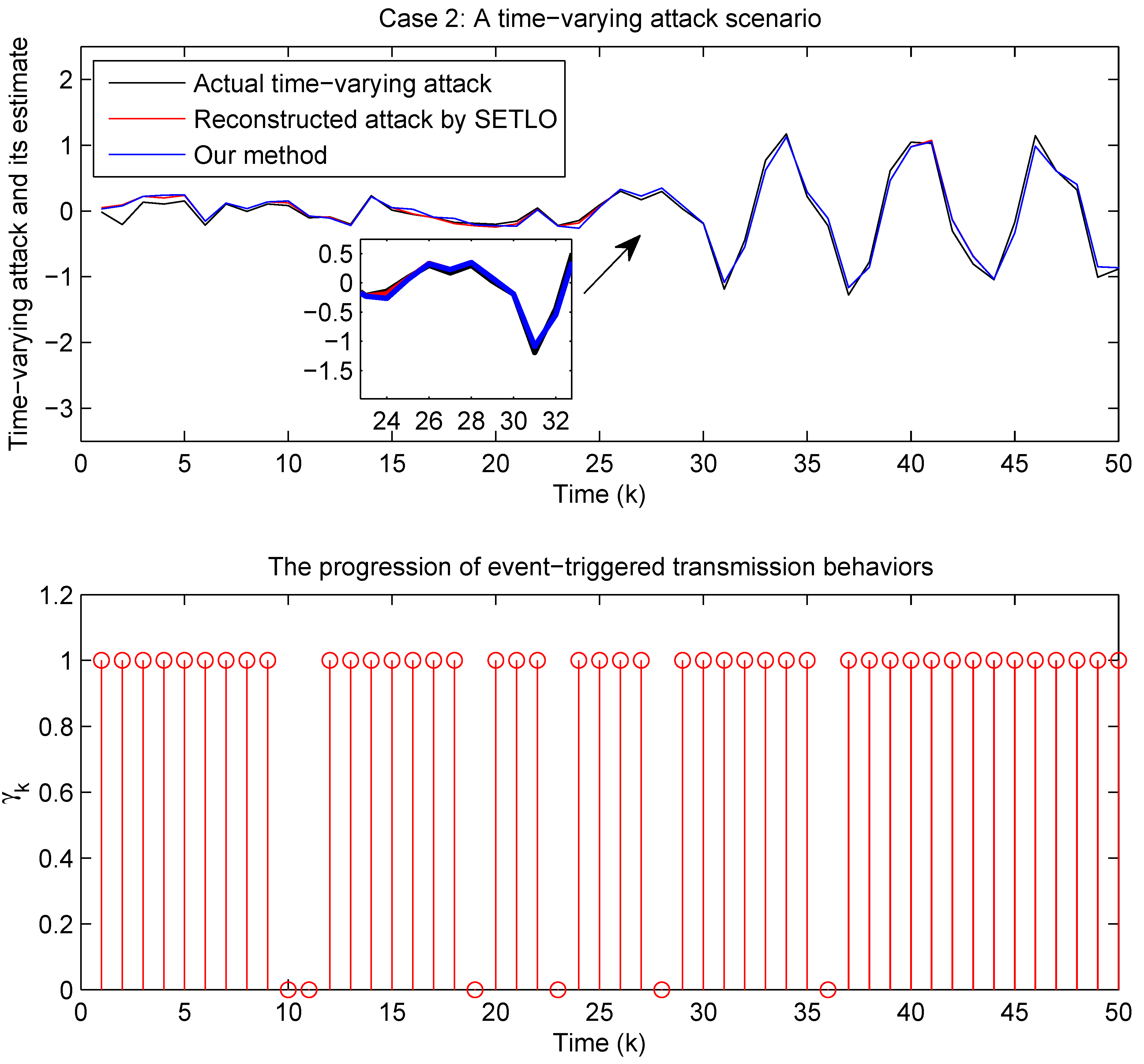
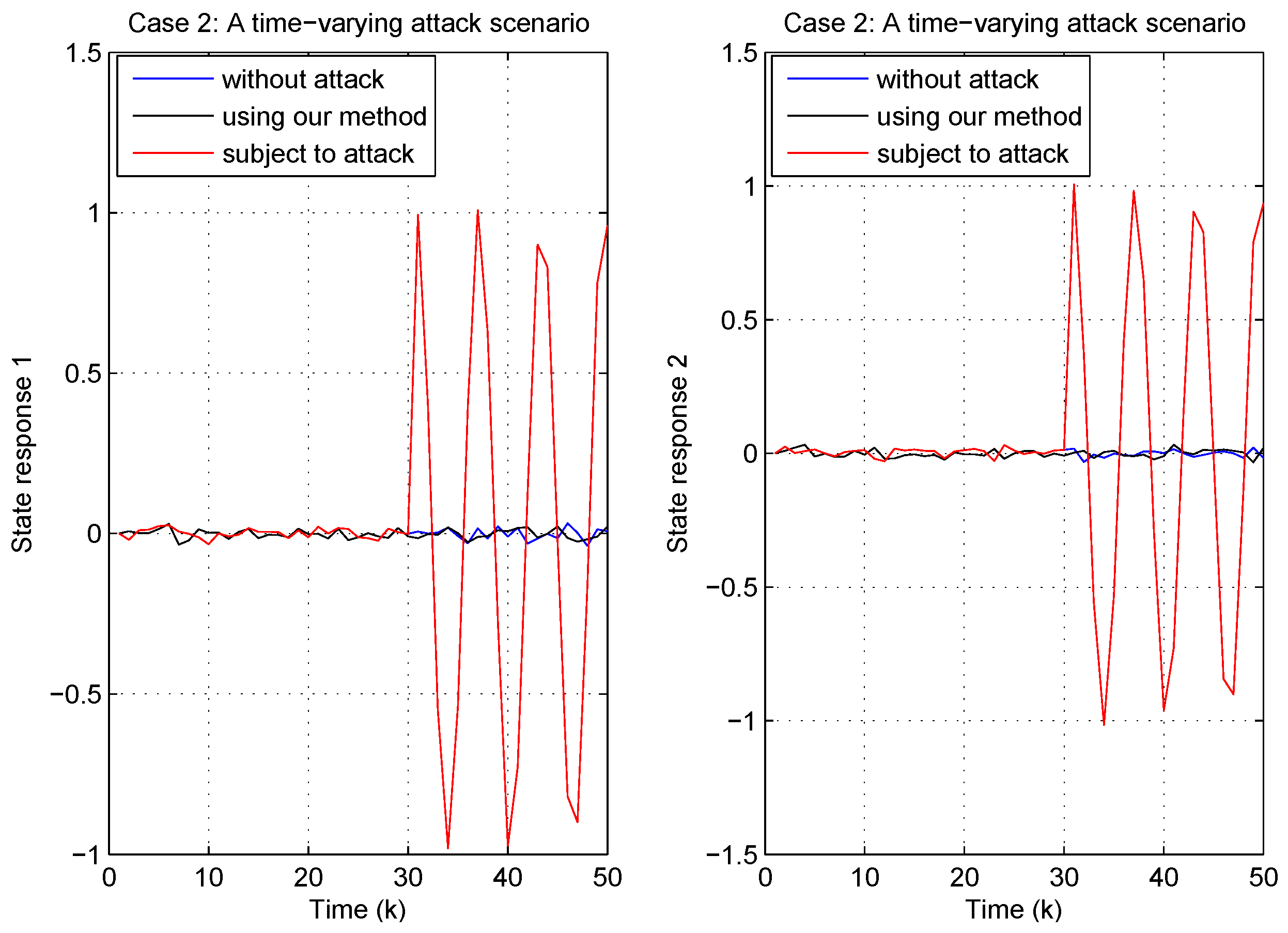
- Case 2: A time-varying attack scenariowhere we model a more dynamic threat environment. The attack parameters fluctuate over time and follow predetermined patterns. This scenario tests the ability of our algorithm to adapt to attacks and remain stable under changing attack conditions.
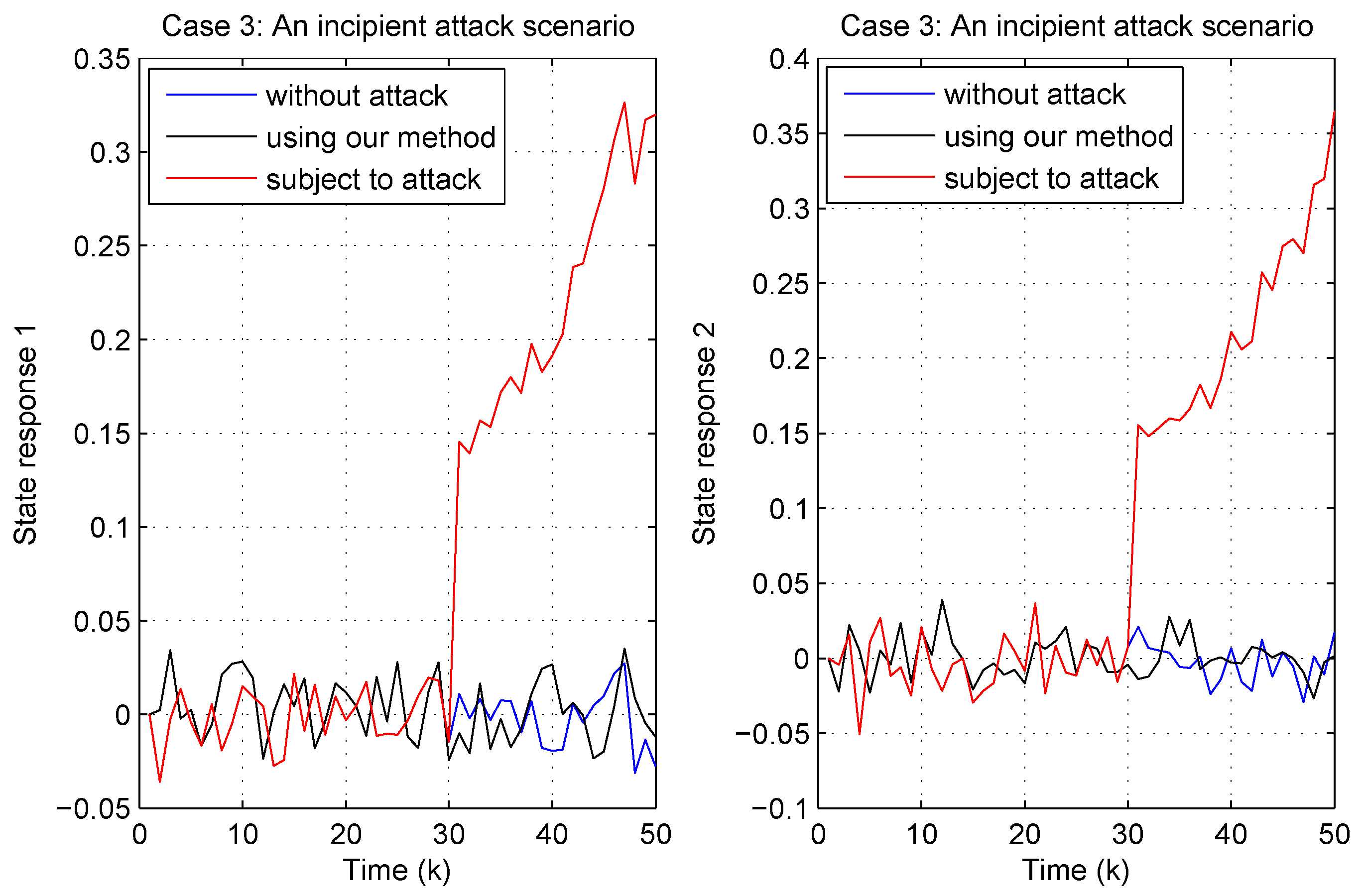
- Case 3: An incipient attack scenario
5.2.1. Experiment I: Performance Evaluation of Attack Detection
5.2.2. Experiment II: Performance Assessment of Attack Reconstruction
5.2.3. Experiment III: Performance Examination of Attack-Tolerant Control
6. Conclusions and Future Work
- The introduced event-triggered attack monitoring strategy guarantees real-time attack detection and alarm, thereby enhancing monitoring capability.
- The proposed PnP architecture integrates with existing control systems without modifying or replacing the original control structure, extending its applicability in practical scenarios.
- The design problems of the attack estimator and attack-tolerant controller can be reformulated into linear matrix inequalities, which can be conveniently solved using mathematical software, thus reducing the complexity of the design process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jamwal, A.; Agrawal, R.; Sharma, M.; Giallanza, A. Industry 4.0 technologies for manufacturing sustainability: A systematic review and future research directions. Appl. Sci. 2021, 11, 5725. [Google Scholar] [CrossRef]
- Jiang, Y.; Yin, S.; Dong, J.; Kaynak, O. A review on soft sensors for monitoring, control, and optimization of industrial processes. IEEE Sens. J. 2020, 21, 12868–12881. [Google Scholar] [CrossRef]
- Ghelani, D. Cyber security, cyber threats, implications and future perspectives: A Review. TechRxiv 2022. [Google Scholar] [CrossRef]
- Jiang, Y.; Yin, S.; Kaynak, O. Data-driven monitoring and safety control of industrial cyber-physical systems: Basics and beyond. IEEE Access 2018, 6, 47374–47384. [Google Scholar] [CrossRef]
- Zhu, F.; Peng, L.; Yang, R. Event-triggered distributed filtering for Markov jump systems over sensor networks. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 1482–1493. [Google Scholar] [CrossRef]
- Shi, P.; Li, F. A survey on Markovian jump systems: Modeling and design. Int. J. Control Autom. Syst. 2015, 13, 1–16. [Google Scholar] [CrossRef]
- Wen, J.; Peng, L.; Nguang, S.K. Stochastic finite-time boundedness on switching dynamics Markovian jump linear systems with saturated and stochastic nonlinearities. Inf. Sci. 2016, 334, 65–82. [Google Scholar] [CrossRef]
- Wen, J.; Nguang, S.K.; Shi, P.; Nasiri, A. Robust H∞ Control of Discrete-Time Nonhomogenous Markovian Jump Systems via Multistep Lyapunov Function Approach. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 1439–1450. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, W.; Wu, Y. Event-Triggered Fault Estimation and Fault Tolerance for Cyber-Physical Systems with False Data Injection Attacks. Actuators 2023, 12, 197. [Google Scholar] [CrossRef]
- Jiang, Y.; Wu, S.; Yang, H.; Luo, H.; Chen, Z.; Yin, S.; Kaynak, O. Secure data transmission and trustworthiness judgement approaches against cyber-physical attacks in an integrated data-driven framework. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 7799–7809. [Google Scholar] [CrossRef]
- Wu, S.; Jiang, Y.; Luo, H.; Zhang, J.; Yin, S.; Kaynak, O. An integrated data-driven scheme for the defense of typical cyber-physical attacks. Reliab. Eng. Syst. Saf. 2022, 220, 108257. [Google Scholar] [CrossRef]
- Yang, H.; Yin, S.; Han, H.; Sun, H. Sparse actuator and sensor attacks reconstruction for linear cyber-physical systems with sliding mode observer. IEEE Trans. Ind. Inform. 2021, 18, 3873–3884. [Google Scholar] [CrossRef]
- Han, Z.; Zhang, S.; Jin, Z.; Hu, Y. Secure state estimation for event-triggered cyber-physical systems against deception attacks. J. Frankl. Inst. 2022, 359, 11155–11185. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, Q.G.; Feng, G.; Shi, Y.; Vasilakos, A.V. A survey on attack detection, estimation and control of industrial cyber–physical systems. ISA Trans. 2021, 116, 1–16. [Google Scholar] [CrossRef]
- Mazunga, F.; Nechibvute, A. Ultra-low power techniques in energy harvesting wireless sensor networks: Recent advances and issues. Sci. Afr. 2021, 11, e00720. [Google Scholar] [CrossRef]
- Sah, D.K.; Amgoth, T. Renewable energy harvesting schemes in wireless sensor networks: A survey. Inf. Fusion 2020, 63, 223–247. [Google Scholar] [CrossRef]
- Girard, A. Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control 2014, 60, 1992–1997. [Google Scholar] [CrossRef]
- Zhu, F.; Liu, X.; Peng, L. Adaptive consensus-based distributed H∞ filtering with switching topology subject to partial information on transition probabilities. Appl. Math. Comput. 2021, 411, 126534. [Google Scholar]
- Ma, L.; Wang, Z.; Cai, C.; Alsaadi, F.E. Dynamic Event-Triggered State Estimation for Discrete-Time Singularly Perturbed Systems with Distributed Time-Delays. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 3258–3268. [Google Scholar] [CrossRef]
- Ma, L.; Wang, Z.; Cai, C.; Alsaadi, F.E. A dynamic event-triggered approach to H∞ control for discrete-time singularly perturbed systems with time-delays and sensor saturations. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6614–6625. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Z.; Yan, H.; Yang, F.; Zhou, X. Adaptive Event-Triggered Transmission Scheme and H∞ Filtering Co-Design Over a Filtering Network with Switching Topology. IEEE Trans. Cybern. 2019, 49, 4296–4307. [Google Scholar] [CrossRef] [PubMed]
- Huo, M.; Luo, H.; Wang, X.; Yang, Z.; Kaynak, O. Real-time implementation of plug-and-play process monitoring and control on an experimental three-tank system. IEEE Trans. Ind. Inform. 2020, 17, 6448–6456. [Google Scholar] [CrossRef]
- Wang, H.; Luo, H.; Jiang, Y.; Xu, X.; Li, X. A data-driven distributed control method for performance optimization of interconnected industrial processes. In Proceedings of the 2022 4th International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 24–27 August 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Wang, H.; Luo, H.; Ren, L.; Huo, M.; Jiang, Y.; Kaynak, O. Data-Driven Design of Distributed Monitoring and Optimization System for Manufacturing Systems. IEEE Trans. Ind. Inform. 2024, 20, 9455–9464. [Google Scholar] [CrossRef]
- Luo, H.; Yang, X.; Krueger, M.; Ding, S.X.; Peng, K. A plug-and-play monitoring and control architecture for disturbance compensation in rolling mills. IEEE/ASME Trans. Mechatron. 2016, 23, 200–210. [Google Scholar] [CrossRef]
- Tarn, T.J.; Rasis, Y. Observers for nonlinear stochastic systems. IEEE Trans. Autom. Control 1976, 21, 441–448. [Google Scholar] [CrossRef]
- Li, S.; Chen, Y.; Zhan, J. Event-triggered consensus control and fault estimation for time-delayed multi-agent systems with Markov switching topologies. Neurocomputing 2021, 460, 292–308. [Google Scholar] [CrossRef]
- Li, Y.; Peng, L. Event-triggered fault estimation for stochastic systems over multi-hop relay networks with randomly occurring sensor nonlinearities and packet dropouts. Sensors 2018, 18, 731. [Google Scholar] [CrossRef]
- Gao, Y.; Li, Y.; Peng, L. Event-triggered fault tolerant control for a class of state saturated systems subject to deception attacks. Trans. Inst. Meas. Control 2020, 42, 1935–1945. [Google Scholar] [CrossRef]
- Li, Y.; Li, P.; Chen, W. An energy-efficient data transmission scheme for remote state estimation and applications to a water-tank system. ISA Trans. 2017, 70, 494–501. [Google Scholar] [CrossRef]
- Ando, T. Generalized Schur complements. Linear Algebra Its Appl. 1979, 27, 173–186. [Google Scholar] [CrossRef]
- Vadi, S.; Bayindir, R.; Toplar, Y.; Colak, I. Induction motor control system with a Programmable Logic Controller (PLC) and Profibus communication for industrial plants—An experimental setup. ISA Trans. 2022, 122, 459–471. [Google Scholar] [CrossRef]
- Turcato, A.C.; Negri, L.H.B.L.; Dias, A.L.; Sestito, G.S.; Flauzino, R.A. A cloud-based method for detecting intrusions in profinet communication networks based on anomaly detection. J. Control Autom. Electr. Syst. 2021, 32, 1177–1188. [Google Scholar] [CrossRef]
- Fikriyadi, F.; Ritzkal, R.; Prakosa, B.A. Security Analysis of Wireless Local Area Network (WLAN) Network with the Penetration Testing Method. J. Mantik 2020, 4, 1658–1662. [Google Scholar]
- AlZawaideh, A.; Boiko, I. Analysis of a sliding mode DC–DC boost converter through LPRS of a nonlinear plant. IEEE Trans. Power Electron. 2020, 35, 12321–12331. [Google Scholar] [CrossRef]
- Chen, W.; Saif, M. An iterative learning observer for fault detection and accommodation in nonlinear time-delay systems. Int. J. Robust Nonlinear Control. IFAC-Affil. J. 2006, 16, 1–19. [Google Scholar] [CrossRef]
- Jia, Q.; Chen, W.; Zhang, Y.; Li, H. Fault reconstruction and fault-tolerant control via learning observers in Takagi–Sugeno fuzzy descriptor systems with time delays. IEEE Trans. Ind. Electron. 2015, 62, 3885–3895. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Li, Y.; Hua, Z.; Chen, J.; Wu, Y. A Dynamic Event-Triggered Secure Monitoring and Control for a Class of Discrete-Time Markovian Jump Systems: A Plug-and-Play Architecture. Information 2024, 15, 649. https://doi.org/10.3390/info15100649
Gao Y, Li Y, Hua Z, Chen J, Wu Y. A Dynamic Event-Triggered Secure Monitoring and Control for a Class of Discrete-Time Markovian Jump Systems: A Plug-and-Play Architecture. Information. 2024; 15(10):649. https://doi.org/10.3390/info15100649
Chicago/Turabian StyleGao, Yi, Yunji Li, Ziyan Hua, Junjie Chen, and Yajun Wu. 2024. "A Dynamic Event-Triggered Secure Monitoring and Control for a Class of Discrete-Time Markovian Jump Systems: A Plug-and-Play Architecture" Information 15, no. 10: 649. https://doi.org/10.3390/info15100649
APA StyleGao, Y., Li, Y., Hua, Z., Chen, J., & Wu, Y. (2024). A Dynamic Event-Triggered Secure Monitoring and Control for a Class of Discrete-Time Markovian Jump Systems: A Plug-and-Play Architecture. Information, 15(10), 649. https://doi.org/10.3390/info15100649