Abstract
A new era of the fifth-generation (5G) networks is realized to satisfy user demands on higher data rate and massive connectivity for information sharing and utilization. The vertical applications such as vehicle-to-everything (V2X) communications, industrial automation, smart factory, smart farm and smart cities require ultra-fast communications and wide service range. Coverage extension is a key issue to support the required demands on higher performance, but requires an additional deployment of base or relay stations. Therefore, an efficient solution needs to be cost-effective and easy, in order to deploy more stations. An unmanned aerial vehicle (UAV) has been considered as a candidate to overcome these issues because it is much more cost-effective than the ground stations and does not require network or cell replanning, thereby enhancing the network coverage without additional excessive deployment procedures of the existing networks. UAVs will play important roles in 5G and beyond networks assisting as macro base stations, relay stations, small cells, or a moving aggregator. The performance of UAV wireless networks highly depends on the position or the trajectory of UAVs and the resource managements of entire networks. Recently, there have been extensive studies on performance analysis, UAV deployment, UAV trajectory and resource management of UAV wireless networks to achieve the required demands on performance. This paper surveys research conducted for the UAV deployment and trajectory to construct UAV wireless networks for the coverage extension, the throughput improvement and the resource management for different use cases and scenarios, so as to encourage further studies in this area.
1. Introduction
The global mobile data traffic reaches 77 exabytes per month in 2022, and annual traffic will be almost one zettabyte [1]. In addition, with the proliferation of wireless devices such as smartphones and tablets, 12.3 billion devices exceeding the world’s population by one and a half times are expected to be wirelessly connected through the Internet of Things (IoT) and machine-to-machine (M2M) communications for information sharing and utilization [1]. In addition, the mobile network speed becomes 28.5 Mbits in 2022 [1]. The Third Generation Partnership Project (3GPP) Long Term Evolution (LTE) and LTE-Advanced systems, known as the fourth-generation (4G) networks, have been deployed to provide the unprecedented data rate and quality of service (QoS). 4G networks currently have responsibility for 54% of connections, but 71% of total traffic, and 4G connections will generate nearly twice the average connections by the third-generation (3G) networks [1]. However, the existing LTE-Advanced systems cannot meet the demands on ultra-high data rate to support emerging applications.
Unlike the wireless communication systems up to 4G LTE-Advanced, the fifth-generation (5G) technologies have been developed to support the unprecedented use cases and applications requiring ultra-reliable high speed and low latency communications and massive connectivity. To this end, the International Telecommunication Union (ITU) recommends three usage scenarios for IMT-2020 and beyond; enhanced Mobile Broadband (eMBB), Ultra-Reliable and Low Latency Communications (uRLLC) and Massive Machine Type Communications (mMTC), and eight key performance indicators (KPIs) as 5G requirements [2]. The key technologies for 5G networks have been developed and studied by researchers and experts from the organizations, institutes, and companies all over the world. Specially, 3GPP approved the first 5G New Radio (NR) non-standalone (NSA) specifications, and completed Release 15 including NR standalone (SA) specifications in 2018. The third 5G standard, 3GPP Release 17, reached stage 3 functional freeze in March 2022, which indicates the system design completion, and is expected to further enhance system performance and expand into new vertical applications. Coverage enhancements and broadcast/multicase expansion are the key 5G milestone in 3GPP Release 17 to enhance the capacity of 5G networks [3].
Communications service providers commercially launched 5G networks in 2019, and the first 5G device was released in early 2020. 5G networks are expected to support 12% of mobile traffic by the end of 2022, and will drive the enormous amount of traffic through its connectivity with large bandwidth (i.e., 100 MHz) and ultra low laency (i.e., one millisecond) [1]. 5G networks will take over more portion of mobile traffic from 4G networks, and the amount of mobile data traffic through 5G connectivity will increase exponentially. To satisfy user demands on higher data rate and massive connectivity for information delivery, coverage extension is a key as pointed out in 3GPP Release 17 for enhancing 5G capability. The coverage extension can be realized with additional base or relay stations in 5G networks. However, the deployment of ground base or relay stations is costly due to cell reorganization to optimize the location of existing stations along with new stations to provide a required QoS. Hence, a smart solution for coverage extension and capacity enhancement is being highly required.
With the development of sophisticated technologies, an unmanned aerial vehicle (UAV) has been advanced in recent years, achieving light weight, high flexibility and longer battery life [4]. Such advances make UAVs be utilized in a wide range of applications such as military, public safety and civil applications [5,6,7,8,9,10]. Moreover, much attention has been paid to utilizing UAVs in 5G and beyond networks to enhance the capacity due to its swift deployment, low maintenance costs and high mobility [11]. In addition, since deploying UAV into wireless communication networks does not require a cell reorganization, UAVs can provide a viable solution for the purpose into existing networks. However, UAV wireless networks still leave many issues to be resolved for stable and reliable services [12]. Unlike other wireless networks such as Mobile Ad hoc Networks (MANETs) and Vehicular Ad hoc Networks (VANETs), the rapid changes in the network topology, including the number of nodes and links in operation and the relative positions of nodes, require special attention. The routing protocol cannot be implemented by simple proactive or reactive manner because the UAV wireless network needs to be reorganized repeatedly when a UAV is out of service. Furthermore, an instantaneous management of users’ links transferring from an inactive UAV to an active UAV is challenging [13]. Lastly, UAV wireless networks require energy efficiency to prolong the lifetime of networks [12].
Most of the issues are related to the configuration of UAV wireless networks because it determines a communications link condition, an optimal routing protocol and an efficient energy management of networks. In other words, the performance of UAV wireless networks depends on the position of UAVs, which changes the channel conditions between ground node and UAV or between UAVs. Therefore, optimal UAV deployment can maximize the service coverage, the overall throughput and the lifetime of networks when UAVs are deployed as aerial base or relay stations in wireless communication networks. In addition, the data collection from massive sensors through IoT and M2M communications is crucial to realize upcoming vertical applications such as smart factory, smart farm and smart city. To this end, UAVs are being used as the UAV aggregator in wireless sensor networks to collect data from and disseminate information to sensors. However, the energy efficiency and mission complete time are major issues in wireless sensor networks to prolong the network lifetime and to save the power at both sensors and UAV, hence the studies on UAV trajectory, along which UAV flies have been paid attention to minimize energy consumption in wireless sensor networks.
There have been extensive studies on optimal UAV deployment and trajectory to extend cell coverage, improve throughput, reduce energy consumption, and ensure reliable connectivity of UAV wireless networks. These can provide the desired solutions on not only 5G, but beyond 5G networks to extend the service coverage, thereby enhancing the overall capacity. In this paper, we provide extensive survey on research conducted for UAV deployment and trajectory to enhance the capacity of UAV wireless networks and to manage them efficiently, so as to encourage further studies on UAV wireless networks. Current challenges and future research directions are summarized at the end of this paper.
Our paper is organized as follows. Section 2 addresses use cases, practical applications and characteristics of UAV wireless networks. In Section 3, we present the studies on UAV deployment and trajectory to extend the coverage and improve the performance of UAV wireless networks, and Section 4 summarizes the lessons learned from the survey. Section 5 provides open problems and future research issues on UAV wireless networks, and Section 6 concludes the paper.
2. UAV in Wireless Communication Networks
A cost-effective and swift deployment, a strong line-of-sight (LoS) communication link and a high mobility make UAVs a promising component of 5G and beyond networks for the capacity enhancement over existing networks. This section presents channel characteristics of UAV wireless networks, UAV use cases in 5G networks and their practical applications.
2.1. Channel Characteristics
A major difference between aerial UAV stations and ground stations is channel characteristics because a strong LoS link dominates the channel conditions in UAV wireless networks. In addition, the performance of UAV wireless networks depends heavily on channel variation as UAVs move. Therefore, the channel characteristics of UAV wireless networks should be considered to optimally deploy UAVs, thereby guaranteeing the required QoS of applications. Generally, UAV wireless networks consist of two dominant channels, air-to-ground (i.e., UAV-to-ground node) and air-to-air (i.e., UAV-to-UAV) channels.
2.1.1. Air-to-Ground Channel
An air-to-ground channel includes a strong LoS link, but not always due to shadowing by obstacles such as buildings and trees. The mobility of UAV also causes the shadowing when it flies, therefore, it is essential to model an air-to-ground channel properly to evaluate the performance of UAV wireless networks. Ref. [14] introduces the LoS probability as
to reflect a LoS component on channel modeling, where a and b are the environmental parameters such as suburban, urban, dense urban, and high-rise urban; is an elevation angle between UAV and ground node. The evaluation angle is defined as , where h is the UAV altitude and r is the horizontal distance between UAV and ground node. Note that increases as becomes large. The non-LoS probability is . The pathloss for LoS link and for non-LoS link can be expressed in the dB scale as [14]
respectively, where FSPL represents the free space pathloss, d is the distance between UAV and ground node, f is the system frequency, c is the speed of light, and and are the excessive pathloss for LoS and non-LoS links, respectively. The resulting average pathloss is
and the air-to-ground channel gain G can be defined as
where is the channel gain when the distance between UAV and ground node is same as the reference distance.
Based on the probabilistic channel model, the air-to-ground channel has been expressed in a different way to reflect the link characteristics more accurately. Ref. [15] presents the impact of shadowing effects by buildings on non-LoS links along with the LoS probability. Ref. [16] utilizes the two-ray ground reflection model to construct a base model of data transmission from UAV to ground station and to allocate radio resources efficiently. A link budget calculation between UAV and ground station is considered in [17] to determine the feasible frequency band, propagation loss, antenna gain, and so on. Ref. [18] proposes an height-dependent small-scale fading and pathloss exponent model to reflect the combination of LoS and multipath scatters along with a Rician model. A statistical propagation model to predict an air-to-ground pathloss between UAV and terrestrial terminal is proposed in [19], and an air-to-ground propagation channel model for an ultra-wideband (UWB) is introduced in [20]. The air-to-ground channel model varies with environments and system parameters, hence, comprehensive measurements and calculations should be conducted for various UAV scenarios.
2.1.2. Air-to-Air Channel
The LoS link dominates an air-to-air channel characteristic, which reduces the impact of multipath fading. A small-scale fading can be neglected, hence a pathloss-dependent large-scale fading with LoS probability can be considered to model an air-to-air channel. Such a channel characteristic allows for the mmWave protocol, which is a new radio protocol in 5G networks [5], to be applied in UAV wireless networks, which achieves a higher capacity of the UAV-to-UAV wireless link, thereby easily co-operating in 5G networks. However, further studies are needed to properly model an air-to-air link and select suitable communication protocols for a given air-to-air channel characteristic.
2.2. Use Cases of UAV Wireless Networks
The major three use cases of UAV in wireless communication networks have been considered as follows: (1) UAV base station (BS) to provide a wireless service within a certain target area [21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41], (2) UAV relay station (RS) to set up wireless links to distant users with no direct connectivity from base station or command center [42,43,44,45,46,47], and (3) UAV aggregator to disseminate an information to or collect a data from the distributed sensors or devices [48,49,50,51,52,53,54,55,56,57], as shown in Figure 1. The first two use cases utilize a static UAV as aerial BS and RS, but a mobile UAV for a moving aggregator, in general.
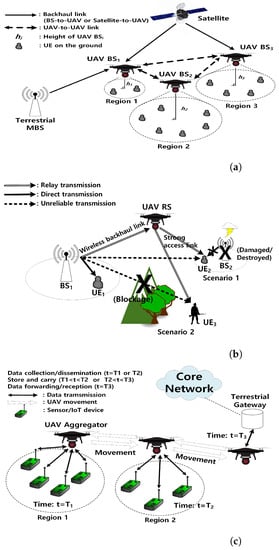
Figure 1.
UAV Use Cases. (a) UAV base station: Multiple UAVs can cover the emergency or disaster area as aerial BSs where no terrestrial BS is available. A terrestrial MBS or a satellite can provide wireless backhaul links to UAV BSs, and UAV BSs can adjust their positions for performance maximization of networks utilizing UAV-to-UAV links. Note that the coverage area of aerial UAV BSs varies with the altitude of UAVs. (b) UAV relay station: UAV RS can extend a terrestrial BS coverage by utilizing a strong air-to-ground LoS link. Scenario 1 considers , who cannot be served by due to natural disaster or destroyed infrastructure. The distant cannot provide a reliable communication link to due to severe pathloss attenuations. in Scenario 2 cannot have a direct link from due to severe blockage. For both scenarios, UAV RS can provide a reliable communication link to or , where it receives a signal from through a wireless backhaul link, and then forwards the received signal to or via a strong air-to-ground LoS access link. (c) UAV aggregator: UAV aggregator flies over sensors or IoT devices to collect data from or disseminate information to them. The mobility of UAV and delay-tolerant transmission (i.e., store-carry-and-forward transmission) can save the transmit power at sensor/IoT devices. A reliable data delivery from sensor/IoT devices to core network is guaranteed, and vice versa.
2.2.1. UAV Base Station
UAV BS assists the existing networks in extending service coverage and provides reliable and seamless connectivity to user equipments (UEs). UAV BS can set a backhaul link from satellite, nearby terrestrial macro base station (MBS) or adjacent UAVs. UAV BS can support the emergency area where the communication infrastructures are damaged or destroyed by natural disasters, hence, the temporary communications are needed, and the extremely crowd area such as sports stadium where the additional links are needed due to base station offloading. This is addressed in [58], as one of the key scenarios that 5G networks should guarantee. Therefore, UAV BS can provide not only the extended coverage [30], but also the improved throughput of the network [26] along with the fast deployment [31]. However, the interference between UAVs and the existing wireless networks should be precisely considered to guarantee the performance of the entire networks [59].
2.2.2. UAV Relay Station
UAV RS provides a wireless connectivity to isolated users or user groups, who do not have a direct communication link from a BS or a transmitter, without sacrificing the performance of networks, thereby enhancing the capacity of the overall networks [44]. The UAV relay network (URN) can be constructed with single or multiple UAVs, but the number of UAVs, the topology and the routing protocol for a reliable relay communication, and an efficient power consumption should be optimized for applications [43,44]. URN is suitable for military communications or emergency responses where the temporary communications between command center and operators are essential. The outage probability of access links should be considered to provide a reliable relay connectivity to mission critical operators [43,44].
2.2.3. UAV Aggregator
UAV aggregator flies around the sky to disseminate (collect) information to (from) the distributed wireless devices such as sensors. Data should be delay-tolerant, which allows the traveling of data within a given latency. Monitoring for public safety or agriculture is an example [51]. The minimization of power consumption is a key challenge to prolong the lifetime of UAV-enabled networks for IoT applications and M2M communications [48].
2.3. Practical Applications of UAV Wireless Networks
2.3.1. Civil and Public Safety Communications
One of the main applications that have attracted considerable attention is civil and public safety. Since 2006, the public safety departments in U.S. have accelerated the acquisition of UAVs on their missions, and currently more than 347 state and local police, sheriff, fire, and emergency units have acquired UAVs [60]. UAVs cannot only provide a reliable communication link, but also help locate a suspect during a pursuit or assisting firefighters at a warehouse fire. In addition, supporting reliable communication links to victims on the disaster-affected area is critical [21], with a minimum number of UAVs for fast and efficient operations [22]. Mapping UAVs to a destroyed area is presented in [30], and further analysis including UAV mobility [26] and genetic algorithm for the deployment of multiple UAVs [25] are considered to improve the throughput without performance degradation of networks. In addition, supporting user connectivity in crowded places such as sports stadiums, open festivals, shopping malls, and other public events is one of main requirements for 5G networks [58,61] because the required average user data rates during busy periods for the shopping mall and stadium are 1.07 (0.7) Mbps for downlink (uplink) and 0.3–3 Mbps for both downlink and uplink, respectively. The study on modeling the crowd traffic is performed to deal with the supply-demand mismatch [62], and the reduction of traffic congestion by utilizing UAV relay system is presented in [63]. The flexible modeling for UAV wireless networks to support public safety communications or crowd areas is necessary to mitigate an interference from other users and guarantee the required QoS; hence, the optimal deployment of UAV is critical to achieve the requirements for a given scenario.
2.3.2. IoT and Wireless Sensor Networks
A UAV can play an important role in IoT networks where small wireless devices such as sensors are connected, and these devices cannot transmit over a long distance due to battery constraints [64]. IMT-2020 and beyond for 5G network and METIS, the EU flagship 5G project, are required to provide the connectivity for devices per 1 [2] and for 300,000 devices within one cell [61], respectively. In IoT networks, UAV can act as a static aerial BS for a small range of IoT communications, or as a moving aggregator to collect (deliver) a data from (to) IoT devices [48,52,65,66]. Several challenges have been presented to utilize UAVs in IoT networks for ensuring a reliable connectivity to a moving IoT gateway [65], collecting data successfully from the distributed sensors [52], reducing energy assumption or shortening response time [66], and minimizing the transmit power at IoT devices by optimal clustering and trajectory of UAVs [48]. Most importantly, the deployment of a static UAV BS and the trajectory of a mobile UAV aggregator are the main issues to efficiently construct IoT networks and prolong the service time to disseminate (collect) data to (from) the distributed IoT devices or sensors.
3. UAV Deployment and Trajectory
As explained in previous sections, UAV will be a key component in 5G and beyond networks due to its cost-effective and fast deployment along with its unique channel characteristics. However, to extend the coverage or improve the throughput of 5G and the beyond networks, it is necessary to analyze the performance of UAV wireless networks considering the constraints on UAV such as limited resources. The channel conditions change as the position of UAV changes, hence, it could enhance or degrade the performance of UAV wireless networks. Therefore, the deployment of UAV is the first step to construct an optimal UAV network configuration. In addition, UAV could be static at a given position, or move around a target area. The optimal trajectory of UAV is a main issue on mobile UAV use cases to reduce the energy consumption and prolong the lifetime of operation. In this section, we survey the recent research on UAV deployment and trajectory conducted for the best utilization of static and mobile UAVs in wireless communication networks.
3.1. A Static UAV
Single or multiple UAVs can be deployed as a BS or a RS in UAV wireless networks. In these use cases, static UAVs are efficient to reduce the energy consumption and to provide the seamless wireless services on a given area or to user groups. Multiple UAV networks have the advantage over single UAV networks. If single UAV networks experience a link interruption, the whole networks become unavailable. However, multiple UAV networks are resilient to the link disruption because they can reconstruct the networks and find other routes to deliver information to the destination. In addition, multiple UAV networks based on mesh networks are capable of self-reorganization to improve the reliability of the whole networks [7]. If they do not fly over a wide area, multiple UAVs are assumed to be static even though re-positioning or self-reorganization during the operation is performed. In this section, we review the literature on the deployment of UAVs for both single and multiple UAV networks.
3.1.1. UAV BS
Multiple UAVs are deployed as aerial BSs in UAV wireless networks, and such networks applied for different target purposes such as the coverage maximization and the throughput maximization with the minimum number of UAVs.
To achieve wider coverage of the networks, Ref. [21] considers a tactical mission in disaster scenarios and proposes a self-deployment based on the Jaccard distance and artificial intelligence algorithms to serve the maximum number of victims while maintaining a seamless connectivity. Ref. [22] proposes the algorithm to cover a given disaster area with least BSs while satisfying all bandwidth requirements. The algorithm allows for overlapping the coverage area of each UAV, and is tested on both randomly generated map and on the real Hurricane Katrina post-disaster map. Ref. [23] investigates the downlink coverage performance of a drone small cell (DSC) and derives the optimal DSC altitude to maximize the ground coverage and to minimize the required transmit power for a single DSC. This study is extended to two DSCs scenario for a certain geographical area with/without interference considerations. The optimal distance between DSCs is derived for the maximum coverage. The downlink coverage probability of UAVs as a function of the altitude and the antenna gain is derived in [24] to determine the minimum number of UAVs needed to guarantee a target coverage probability for a given geographical area. Authors use the circle packing theory to position UAVs for the maximum coverage area.
To improve the throughput and capacity of the networks, ref. [25] utilizes a genetic algorithm (GA) to optimize the position of UAVs, thereby maximizing the fifth-percentile throughput of the network over a given geographical area, and its objective function is represented as
where is the function of the fifth-percentile throughput at the individual locations of each UAV . Further, Ref. [26] analyzes the throughput gains by exploiting the mobility of UAVs, and then deploys UAV BSs by the brute force search at the optimized locations where both throughput coverage and fifth-percentile spectral efficiency of the network are improved. In [27], the multiple UAVs are deployed to guarantee the required QoS for different user distributions when the co-channel interference exists. First, the mean-shift algorithm and global positioning system (GPS) based prior information of users’ positions are utilized to find x-y coordinates of UAVs supporting the maximum number of users. Then, the successive convex optimization and block coordinate descent technique are applied to jointly optimize UAVs altitude and transmit power. The two-step algorithm achieves the QoS requirement by maximizing the system throughput for all ground users, thereby obtaining 100% coverage probability and fairness among users. Ref. [28] proposes the distributed algorithm to achieve 100% spectral efficiency of DSCs for a realistic drone speed, height, and user traffic model with dynamic repositioning, but without an additional energy consumption. Ref. [29] utilizes K-means clustering and a stable marriage approach for associations between UAVs and users, and proposes the particle swarm optimization (PSO) based approach to maximize the spectral efficiency considering co-channel interference from other UAVs while guaranteeing the minimum required QoS. Ref. [30] maps UAVs to high demand area by providing solutions to the MBS decision and cooperative UAV allocation problems to increase the capacity and coverage of the wireless communication networks. In [31], the positioning objective is formulated as a minimax facility problem, which is solved by the concept of entropy nets. The proposed placement and distribution of cooperative UAVs in the heterogeneous networks optimize the overall network delay. Ref. [32] investigates the user-demand-based UAV assignment problem over a given geographical area requiring high traffic demands. A neural-based cost function is evaluated to match UAV to a particular geographical area. Ref. [33] investigates the average spectral efficiency depending on the movements of UAV BSs in vertical and horizontal directions. It shows that keeping all UAVs at a fixed altitude outperforms altering the altitude of UAVs flexibly when considering energy consumption on UAV movements. Ref. [34] targets to achieve a load balance in wireless networks. The raw dataset of students’ access in wireless network on campus is utilized to predict the number of served users in the area. ARIMA and XGBoost models are applied to linear and non-linear predictions respectively, for the estimation of the number of served uses in the next 24 h. Based on the prediction, UAV BSs are deployed to achieve the load balance.
The minimum number of UAVs to construct UAV wireless networks has been derived to manage them efficiently. Ref. [35] proposes a polynomial-time algorithm with successive spiral UAV placement to cover all UEs on the ground, but without considering the height of UAVs. Ref. [36] aims at finding the positions of UAVs and the minimum number of UAVs in target areas with various user densities using a heuristic algorithm. In [37], the miminum number of UAVs is first derived to cover the disaster area by the K-means clustering algorithm considering users’ bandwidth constraints. Then, the algorithm for rapid deployment of UAVs is proposed to minimize the maximum deployment delay of UAVs.
Even though multiple UAV networks are more reliable than single UAV wireless networks, there have been applications utilizing single UAV wireless networks and the related studies to improve the coverage and the performance along with the efficient management. Ref. [38] proposes an optimal placement algorithm for UAV BS to maximize the number of covered users utilizing the minimum transmit power. Two dimensional deployment problem is decoupled into the vertical and horizontal dimensions, and the UAV BS deployment in the horizontal dimension is modeled as a circle placement problem and a smallest enclosing circle problem. Ref. [39] formulates a three-dimensional placement problem to maximize the number of covered users by UAV, which reduces to a mixed integer non-linear problem (MINLP) by using a one-dimensional bisection search and is solved with the interior point optimizer. The benefit of repositioning UAV BS is explored in [40] to improve the spectral efficiency by placing the UAV BS closer to UEs. The algorithm to autonomously control the repositioning of UAV BS depending on users’ activities and movements is proposed, and it achieves 10.5% spectral efficiency gain without an additional energy consumption of UAV. Ref. [41] considers a single UAV to provide a wireless connectivity to indoor users inside a high-rise building under disaster situations. It introduces two cases of practical interest and provides an efficient UAV placement to minimize the total transmit power required to cover the entire high-rise building. Ref. [18] analyzes both power and sum-rate capacity gains of UAV BS and represents the trade-off between them. It proposes an altitude dependent performance model, and determines an optimal altitude range. Within the optimal altitude range, the height of UAV BS is adapted to optimize the sum-rate or the power, respectively.
3.1.2. UAV RS
Compared with UAV BS, there have been less studies on UAV RS due to the limited capacity to provide a wireless connectivity to a small amount of user groups. However, it is also important on mission-critical communications such as military and first responder communications. Ref. [42] considers the placement of multiple UAVs as a facility location problem (FLP) to improve the connectivity by grouping mobile UEs to the corresponding UAV with the shortest distance, thereby maximizing the capacity of the downlink. Ref. [43] proposes a UAV deployment algorithm for multiple UAV relay systems to maximize an average data rate of UEs and to provide a reliable relay connectivity to an isolate UE simultaneously. The minimum number of UAVs and the minimum number of transmission time slots to improve an average data rate are derived, and the performance comparison between multiple UAVs and single UAV relay systems with respect to the position of an isolated UE is presented. Ref. [44] applies a non-orthogonal transmission at BS in a single UAV relay system to increase the signal to interference plus noise ratio (SINR) at UEs within BS coverage. A joint resource allocation algorithm is proposed to optimize the transmit period and power of signals at both BS and UAV. The proposed algorithm maximizes the overall throughput of UEs while guaranteeing a seamless UAV relay transmission by analyzing the outage probability and utilizing the power control strategy. This study is extended in [45], where the minimum required transmission time slots between terrestrial BS and UAV and between UAV and an isolated user are first determined, and the feasible area within that UAV can be deployed is reduced. The proposed UAV deployment and time allocation algorithm achieves a fast and optimal UAV deployment due to the small feasible search area. Ref. [46] investigates how the type of wireless backhaul links (i.e., network-centric or user-centric) would affect the number of covered users. The optimal three-dimensional (3D) backhaul-aware placement of a single UAV RS is obtained to maximize both the total number of served users and sum-rates. The robustness of the network is also examined with respect to the user distributions. A sum-rate maximization for UAV-enabled two-way relay systems is considered in [47], where the local optimal solution for joint optimization of time slot pairing, transmit power allocation, and the UAV deployment is obtained.
3.2. A Mobile UAV
3.2.1. UAV Aggregator
A mobile UAV has attracted attention on IoT applications and wireless sensor networks to collect a data from or to disseminate an information to devices or sensors as a moving aggregator [48,49,50,51,52,53,54,55,56,57]. To efficiently utilize UAVs, optimal deployment or trajectory and energy efficiency of UAVs should be considered, and these are the main challenges of the UAV aggregator to prolong the lifetime of networks and maintain stable systems. Ref. [48] investigates the optimal trajectory and deployment of multiple UAVs to enable reliable uplink communications for data collection from IoT devices with a minimum energy consumption by properly clustering IoT devices and serving each cluster with one UAV. This study is extended in [49] to jointly optimize the 3D placement and the mobility of the UAVs, UAV-device association, and uplink power control. The proposed approach achieves the reduction of total transmit power of IoT devices by 45% and the improvement of system reliability by 28% compared with static UAV BSs. Ref. [50] minimizes the mission completion time to find a target (e.g., set a coverage area) and to setup a communication link (e.g., network connectivity) by prioritizing coverage or connectivity depending on the mission demands. Ref. [51] addresses the capacity and delay of UAV wireless networks with multiple UAVs to monitor the 3D environment, and derives the capacity and delay scaling laws of UAV wireless networks with a mobility pattern information. UAVs deliver a delay-tolerant data with a store-carry-and-forward (SCF) method when UAVs return to control station to charge the battery. The capacity of the networks increases and the delay decreases as more UAVs are deployed. Ref. [52] applies a Markov chain to model the irregular mobility of a single UAV for data collection from sensors. It also investigates the success probability of information transmission depending on the distance between UAV and sensors. Ref. [53] jointly optimizes the sensors’ wake-up schedule and UAV’s trajectory to minimize the maximum energy consumption at sensors to prolong the network lifetime. Ref. [54] explores a UAV as a SCF node to enhance the availability of delivery path and to reduce the end-to-end packet delivery delay for VANET, which is one of the major vertical applications in 5G networks. In [55], wireless sensor network (WSN) is used to monitor animals. To determine the best monitoring scheme under different environments, it investigates the average energy consumption and the buffer capability of two proposed data collection systems, which determines the UAV trajectory. Ref. [56] formulates the data collection utility maximixation problem (UMP) to improve the data collection efficiency and considers it jointly on the determination of UAV trajectory. The cooperative trajectory planning algorithm in large-scale WSN is proposed in [57] to minimize the total mission time to collect data. It first divides the overall mission area into subregions where UAV can stay for data collection. In this study, a battery-carrying truck is considered as a mobile recharging station, and follows UAV. The proposed algorithm also takes the position of the truck into account for the determination of UAV trajectory because the distance between UAV and truck affects the mission completion time when UAV is out of battery. From the literature review, it is obvious that the UAV trajectory in IoT and wireless sensor networks targets to minimize the energy consumption and mission time to prolong the network lifetime.
3.2.2. UAV BS/RS
A mobile UAV as UAV BS or RS could not be the proper choice in terms of energy efficiency. To this end, there have been little studies on mobile UAV BS or RS. Ref. [67] introduces a simple circular UAV trajectory and maximizes the energy efficiency of UAV by jointly optimizing UAV’s flight radius and speed. In [68], the coexistence of UAV and device-to-device (D2D) communication networks is considered for the downlink transmission. The minimum number of stop points of UAV to completely cover the area is derived using the disk covering problem and the outage probability of D2D devices. Ref. [69] solves the throughput maximization problem in mobile relaying systems by optimizing the transmit powers, the relay trajectory and the information-causality constraint at the relay. It demonstrates that the throughput-optimal power allocations at source and relay node follow a staircase water filling structure over time. In addition, the throughput is further improved by optimizing the UAV’s trajectory by successive convex optimization when power allocations are given. Ref. [70] studies UAV-enabled mobile relaying systems to assist the information transmission from a ground source to a ground destination when a direct link between them is blocked. The spectrum efficiency and energy efficiency are maximized by jointly optimizing the time allocations for UAV’s relaying along with its flying speed and trajectory.
4. Summary and Lessons Learned
The extensive survey of recent works on the UAV deployment and trajectory in wireless communication networks is summarized in Table 1, Table 2 and Table 3. It is observed that early studies on the coverage maximization of multiple UAV wireless networks in Table 1 do not consider unique characteristics of UAV wireless networks such as an air-to-ground channel and interferences between UAVs, but only focus on covering a given area [21,22]. Refs. [23,24] consider those characteristics with altering the altitude of UAVs to minimize the transmit power at UAVs. On the other hand, most research on the performance enhancement of multiple UAV wireless networks do not consider optimizing the altitude of individual UAVs, but all UAVs at a fixed height. UAV wireless networks at a fixed height could outperform those with the altitude flexibility in some scenarios when the resources are properly managed [33]. However, it is essential to optimize the altitude of the individual UAV to best utilize UAV wireless networks, which is a challenging problem due to a high computational complexity. As in Table 2, single UAV wireless networks, such as UAV BS or RS, mostly consider the variation of the height of UAV to achieve the target performance because it requires much less computational complexity compared with multiple UAV wireless networks. The UAV aggregator in Table 3 selects a flexible trajectory of UAV to maximize the energy efficiency to prolong the lifetime of networks and maintain reliable systems. As introduced in this paper, there have been lots of studies on the deployment and trajectory of UAVs; however, it is still in its infancy and further research on various scenarios should be achieved to satisfy a target performance for their use cases.

Table 1.
Deployment of multiple UAVs.
Table 2.
Deployment of single UAV.
Table 3.
Trajectory of mobile UAVs.
The optimal deployment or trajectory of UAVs in the literature targets to maximize either the coverage or the throughput of networks with consideration of the altitude flexibility, interferences from UAVs and air-to-ground channels. However, to best utilize UAVs in wireless communication networks, it is essential to jointly consider the resource allocations of transmit power and time at UAVs and ground nodes in the entire networks including scheduling methods and UAV-UEs associations, along with the deployment of UAVs. However, there have been very few studies on optimal resource allocations for UAV wireless networks [44]. Further research on optimal resource allocations for various scenarios should be conducted, and they can be further extended to the joint optimization of UAV deployment and resource allocations to maximize both coverage and throughput of UAV wireless networks. This is challenging, but determines key features on the construction of UAV wireless networks.
5. Open Problems and Future Opportunities for UAV Wireless Networks
In the previous sections, we have presented studies on UAV deployment and trajectory for UAV use cases in wireless communication networks including channel characteristics, and summarized the main lessons learned from this survey. Despite extensive studies on UAV deployment and trajectory in wireless communication networks, there are still many open problems to be investigated and future opportunities to make solutions. Most of the research introduced in this survey proposes the optimal UAV deployment or trajectory algorithm to achieve their target performance; however, it requires a computational complexity to derive the optimal result, thereby limiting their practical utilization in a real world. Recently, the machine learning (ML) framework is integrated into UAV wireless networks and expected to provide solutions for channel modeling, throughput enhancement, and complexity reduction along with UAV deployment and trajectory. Open problems, future opportunities, and applications of ML techniques for solutions are presented in the next section.
5.1. Channel Characteristics
The proper channel model in wireless communication networks is most important factor to accurately evaluate and estimate the network performance [15]. In particular, the channel characteristics of UAV wireless networks are quite different from those of the traditional ground-based networks due to the dominance of air-to-air and air-to-ground links [72]. Furthermore, compared to the air-to-air link, which composes of strong LoS communication channels, an air-to-ground link is prone to experience the blockage, thereby requiring an accurate air-to-ground channel model to construct optimal UAV wireless networks. However, the channel characteristics of air-to-ground link vary with the UAV altitude, elevation angle between UAV and ground node, environment, and so on. Therefore, comprehensive measurements in various enviroments considering the effects of key factors is essential for air-to-ground channel model. Clearly, it is challenging to find a generic air-to-ground channel model.
Recent studies provide valuable insights into air-to-ground channel characteristics that are useful to derive a generic air-to-ground channel model. The work in [73] provides a comprehensive review on the air-to-ground channel model and a brief description for air-to-ground channel measurement plans and the modeling campaign. Another study in [74] provides a comprehensive survey on air-to-ground propagation along with large-scale and small-scale fading models. In [75], both measurement-based models for path loss, delay spread and correlations among signals, and statistical models for the air-to-ground channel are provided. It reveals that the small-scale fading in air-to-ground link can be characterized by the Rician fading model, where the Rician K-factor depends on the elevation angle and the UAV altitude. There are some measurement-based models [76,77,78] that can determine some key factors for air-to-ground channel characteristics, but still cannot capture all variations under different environments. To overcome this issue, the study in [79] applies the unsupervised learning clustering technology to air-to-ground channel modeling. It derives the 3D temporary channel model based on received signal strength (RSS) measurements, and adapts an online learning approach. An online learning approach allows dynamic changes on network topology to be considered on the 3D temporary channel model, thereby significantly increasing the accuracy of the channel model. ML framework on air-to-ground channel model can enhance the accuracy; however, more research to realize practical air-to-ground communication link is necessary.
5.2. UAV Deployment and Trajectory
We have surveyed recent studies on UAV deployment and trajectory in this paper to construct UAV wireless networks. As discussed in Section 4, the key consideration for UAV deployment on UAV wireless networks is coverage and throughput enhancement while there is a network lifetime for UAV trajectory. There have been lots of studies on UAV deployment and trajectory, but it has still open problems because it depends on environments, users’ location, air-to-ground channel characteristics, and so on. Moreover, an air-to-ground channel characteristic is a function of UAV altitude, hence, the modeling of air-to-ground link and UAV deployment influence each other. Furthermore, the users’ mobility and resource management have not been jointly considered on UAV deployment, which restricts actual use in a real environment. Considering all key factors on UAV deployment to optimize the performance of UAV wireless networks is a challenging task. When deploying multiple UAVs, it becomes more challenging.
Other technologies on communication systems can be coupled with UAV deployment and trajectory to further improve the performance of UAV wireless networks. In [80], the cognitive radio (CR) technology is integrated into micro UAV-based communications to improve the spectral efficiency, and the UAV position and tranmit power are jointly optimized to minimize the UAV flying time, thereby achieving the energy efficiency at the same time. Ref. [81] also considers UAV-enabled CR networks and optimizes the UAV trajectory and transmit power while maximizing the average secrecy rate of the secondary network to improve the security on communications via UAV. Ref. [82] deals with the resouce allocation for the transmit power and channel time allocations for secondary ground user to maximize the total network throughput. The stationary UAV positions to hover and transmit are determined where the required throughput and no interference from the primary network on individual secondary ground user are guaranteed. Ref. [83] proposes the interference management framework for UAV-assisted networks based on the power control and UAV clustering, which could be combined with UAV deployment and trajectory to further improve the QoS in UAV wireless networks. In addition, non-orthogonal multiple access (NOMA) is applied in [84] to maximize the sum-rate of network by jointly optimizing the UAV deployment and power allocation. It has been well known that superposition-coded signal transmission and successive interference cancellation (SIC) in non-orthogonal transmission achieve superior performance over orthoghonal transmission. A millimeter wave (mmWave) communication is considered in UAV wireless networks, and [85] provides reviews on research achievements for mmWave communications in UAV wireless networks as well as the technical advantages and challenges. Due to the characteristics of mmWave communications such as high FSPL, atmospheric attenuation, and blockage effect, mmWave communications are suitable for air-to-air links between UAVs. In addition, NOMA and mmWave communications are the key protocols in 5G stadards, therefore, they enable UAV wireless networks to be integrated with 5G and beyond wireless networks to support the required performance demands. In [86], a simultaneous wireless information and power transfer (SWIFT) is employed in UAV-enabled two-way relay systems to harvest energy through the power splitting (PS) scheme. This study proposes PS factor optimization along with beamforming to maximize the sum-retained energy at two user equipments, and is extended in [87], considering multiple user equipments.
ML techniques are also integrated into the construction of UAV wireless networks, specially UAV deployment and trajectory to satisfy the required performance. In [88], the joint optimization of multiple UAVs deployment and power control is proposed to maximize the sum trasmit rate and to satisfy the users’ rate requirement. Both users’ position and UAVs’ deployment are obtained by ML techniques, which are echo state network (ESN) based predetion algorhtim and multi-agent Q-learning-based placement algorithm, respectively. In [89], the optimal deployment of UAV BS for communication service to multiple users is proposed to maximize the sum trasmit rate using Q-learning. The algorithm can learn the network topology with no explicit information of the environment to improve the network performance. The integration of ML techniques into UAV wireles networks increases as it can provide an efficient solution for complicated problems considering multi-factors. Q-learning, artificial neural network (ANN), deep Q-network (DQN) are applied in [90,91,92,93] to improve the throughput, sum rate, and spectral efficiency of UAV wireless networks thereby extending the service coverage and enhancing the network capacity, however, more research on various environments should be conducted for practical implementation.
6. Conclusions
The UAV is integrated into 5G and beyond networks to extend the coverage and improve the throughput as base or relay stations to support the higher data rate and massive connectivity. The performance of UAV wireless networks highly depends on their configuration, hence, the optimal deployment of UAV is a major issue along with the efficient utilization of radio resources. The literature on UAV deployment and trajectory is investigated and categorized as static and mobile UAVs for three different use cases. Open problems and future research directions are summarized to obtain realistic channel characteristics between UAV and ground nodes, and UAV deployment and trajectory for practical implemeatation. In addition, key technologies on communication systems are discussed as an additional factor on UAV deployment and trajectory for performance improvement. ML techniques are also expected to provide solutions for multi-factor problems in UAV wireless networks; however, the integration of ML techniques into UAV wireless networks should be widely conducted to achieve a target performance under various environments. In this paper, the communication aspect for UAV deployment and trajectory is only considered to construct UAV wireless networks; however, the limitation on the UAV itself, such as battery shortage and operation under a GPS-denied environment, should be considered for practical uses.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The author declares no conflict of interest.
References
- Cisco. Cisco Visual Networking Index: Global Mobile Data Traffic Forecast Update, 2017–2022; White Paper; Cisco: San Jose, CA, USA, 2019. [Google Scholar]
- ITU-R M. [IMT.VISION]. IMT Vision—Framework and Overall Objectives of the Future Development of IMT for 2020 and Beyond; Recommendation ITU-R M.2083; ITU: Geneva, Switzerland, 2015. [Google Scholar]
- 3GPP TS 38 Series. Available online: http://www.3gpp.org/DynaReport/38-series.htm (accessed on 1 April 2022).
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015. [Google Scholar]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless Communications with Unmanned Aerial Vehicles: Opportunities and Challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R.M. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C.; Han, Z.; Ren, Y.; Maunder, R.G.; Hanzo, L. Taking Drones to the Next Level: Cooperative Distributed Unmanned-Aerial-Vehicular Networks for Small and Mini Drones. IEEE VEhicular Technol. Mag. 2017, 12, 73–82. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Taleb, T.; Arouk, O. Low-Altitude Unmanned Aerial Vehicles-Based Internet of Things Services: Comprehensive Survey and Future Perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Li, Y.; Cai, L. UAV-Assisted Dynamic Coverage in a Heterogeneous Cellular System. IEEE Netw. 2017, 31, 56–61. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP Altitude for Maximum Coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Holis, J.; Pechac, P. Elevation Dependent Shadowing Model for Mobile Communications via High Altitude Platforms in Built-Up Areas. IEEE Trans. Antennas Propag. 2008, 56, 1078–1084. [Google Scholar] [CrossRef]
- Kawamoto, Y.; Nishiyama, H.; Kato, N.; Ono, F.; Miura, R. An efficient throughput-aware resource allocation technique for data transmission in unmanned aircraft systems. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Medina-Pazmiño, W.; Jara-Olmedo, A.; Valencia-Redrován, D. Analysis and determination of minimum requirements for a data link communication system for unmanned aerial vehicles- UAV’s. In Proceedings of the 2016 IEEE Ecuador Technical Chapters Meeting (ETCM), Guayaquil, Ecuador, 12–14 October 2016. [Google Scholar]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Joint Sum-Rate and Power Gain Analysis of an Aerial Base Station. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM) Workshops, Washington, DC, USA, 4–8 December 2016. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference (GLOBECOM), Austin, TX, USA, 8–12 December 2014. [Google Scholar]
- Khawaja, W.; Guvenc, I.; Matolak, D. UWB Channel Sounding and Modeling for UAV Air-to-Ground Propagation Channels. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016. [Google Scholar]
- Sánchez-García, J.; García-Campos, J.M.; Toral, S.L.; Reina, D.G.; Barrero, F. An Intelligent Strategy for Tactical Movements of UAVs in Disaster Scenarios. Int. J. Distrib. Sens. Netw. 2016, 12, 8132812. [Google Scholar] [CrossRef]
- Košmerl, J.; Vilhar, A. Base stations placement optimization in wireless networks for emergency communications. In Proceedings of the 2014 IEEE International Conference on Communications (ICC) Workshops, Sydney, Australia, 10–14 June 2014. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone Small Cells in the Clouds: Design, Deployment and Performance Analysis. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient Deployment of Multiple Unmanned Aerial Vehicles for Optimal Wireless Coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Merwaday, A.; Tuncer, A.; Kumbhar, A.; Guvenc, I. Improved Throughput Coverage in Natural Disasters: Unmanned Aerial Base Stations for Public-Safety Communications. IEEE Veh. Technol. Mag. 2016, 11, 53–60. [Google Scholar] [CrossRef]
- Merwaday, A.; Guvenc, I. UAV Assisted Heterogeneous Networks for Public Safety Communications. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015. [Google Scholar]
- Valiulahi, I.; Masouros, C. Multi-UAV Deployment for Throughput Maximization in the Presence of Co-Channel Interference. IEEE Internet Things J. 2021, 8, 3605–3618. [Google Scholar] [CrossRef]
- Fotouhi, A.; Ding, M.; Hassan, M. Dynamic base station repositioning to improve spectral efficiency of drone small cells. In Proceedings of the 2017 IEEE 18th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Macau, China, 12–15 June 2017. [Google Scholar]
- Hydher, H.; Jayakody, D.N.K.; Hemachandra, K.T.; Samarasinghe, T. Intelligent UAV Deployment for a Disaster-Resilient Wireless Network. Sensors 2020, 20, 6140. [Google Scholar] [CrossRef]
- Sharma, V.; Srinivasan, K.; Chao, H.-C.; Hua, K.-L.; Cheng, W.-H. Intelligent Deployment of UAVs in 5G Heterogeneous Communication Environment for Improved Coverage. J. Netw. Comput. Appl. 2017, 85, 94–105. [Google Scholar] [CrossRef]
- Sharma, V.; Sabatini, R.; Ramasamy, S. UAVs Assisted Delay Optimization in Heterogeneous Wireless Networks. IEEE Commun. Lett. 2016, 20, 2526–2529. [Google Scholar] [CrossRef]
- Sharma, M.; Bennis, M.; Kumar, R. UAV-Assisted Heterogeneous Networks for Capacity Enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210. [Google Scholar] [CrossRef]
- Gruber, M. Role of altitude when exploring optimal placement of UAV access points. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016. [Google Scholar]
- Hu, J.; Zhang, H.; Liu, Y.; Li, X.; Ji, H. An Intelligent UAV Deployment Scheme for Load Balance in Small Cell Networks Using Machine Learning. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference, Marrakesh, Morocco, 15–18 April 2019. [Google Scholar]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement Optimization of UAV-Mounted Mobile Base Stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the Number and 3D Placement of Drone Base Stations in Wireless Cellular Networks. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, USA, 18–21 September 2016. [Google Scholar]
- Qu, H.; Zhang, W.; Zhao, J.; Luan, Z.; Chang, C. Rapid Deployment of UAVs Based on Bandwidth Resources in Emergency Scenarios. In Proceedings of the 2020 Information Communication Technologies Conference (ICTC), Nanjing, China, 29–31 May 2020. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D placement of an aerial base station in next generation cellular networks. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar]
- Fotouhi, A.; Ding, M.; Hassan, M. Dynamic Base Station Repositioning to Improve Performance of Drone Small Cells. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM) Workshops, Washington, DC, USA, 4–8 December 2016. [Google Scholar]
- Shakhatreh, H.; Khreishah, A.; Ji, B. Providing wireless coverage to high-rise buildings using UAVs. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Wang, H.; Huo, D.; Alidaee, B. Position Unmanned Aerial Vehicles in the Mobile Ad Hoc Network. J. Intell. Robot. Syst. 2014, 74, 455–464. [Google Scholar] [CrossRef]
- Han, S.I.; Baek, J.; Han, Y. Deployment of Multi-layer UAV Relay System. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018. [Google Scholar]
- Baek, J.; Han, S.I.; Han, Y. Optimal Resource Allocation for Non-orthogonal Transmission in UAV Relay Systems. IEEE Wirel. Commun. Lett. 2018, 7, 356–359. [Google Scholar] [CrossRef]
- Han, S.I.; Baek, J. Optimal UAV Deployment and Resource Management in UAV Relay Networks. Sensors 2021, 21, 6878. [Google Scholar] [CrossRef]
- Kalantari, E.; Shakir, M.Z.; Yanikomeroglu, H.; Yongacoglu, A. Backhaul-aware robust 3D drone placement in 5G+ wireless networks. In Proceedings of the 2017 IEEE International Conference on Communications (ICC) Workshops, Paris, France, 21–25 May 2017. [Google Scholar]
- Lu, K.; Wu, F.; Xiao, L.; Liang, Y.; Yang, D. Sum-rate maximization for UAV-enabled two-way relay systems. Digit. Commun. Netw. 2022, in press. [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Internet of Things: Can UAVs Provide an Energy-Efficient Mobile Architecture? In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Unmanned Aerial Vehicles (UAVs) for Energy-Efficient Internet of Things Communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Brown, T.X.; Bettstetter, C. Multi-objective UAV path planning for search and rescue. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Wei, Z.; Wu, H.; Huang, S.; Feng, Z. Scaling Laws of Unmanned Aerial Vehicle Network with Mobility Pattern Information. IEEE Commun. Lett. 2017, 21, 1389–1392. [Google Scholar] [CrossRef]
- Arvanitaki, A.; Pappas, N. Modeling of a UAV-based data collection system. In Proceedings of the 2017 IEEE 22nd International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Scania, Sweden, 19–21 June 2017. [Google Scholar]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-Efficient Data Collection in UAV Enabled Wireless Sensor Network. IEEE Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef]
- Fawaz, W.; Atallah, R.; Assi, C.; Khabbaz, M. Unmanned Aerial Vehicles as Store-Carry-Forward Nodes for Vehicular Networks. IEEE Access 2017, 5, 23710–23718. [Google Scholar] [CrossRef]
- Vera-Amaro, R.; Rivero-Ángeles, M.E.; Luviano-Juárez, A. Data Collection Schemes for Animal Monitoring Using WSNs-Assisted by UAVs: WSNs-Oriented or UAV-Oriented. Sensors 2020, 20, 262. [Google Scholar] [CrossRef]
- Chen, M.; Liang, W.; Das, S.K. Data Collection Utility Maximization in Wireless Sensor Networks via Efficient Determination of UAV Hovering Locations. In Proceedings of the 2021 IEEE International Conference on Pervasive Computing and Communications (PerCom), Kassel, Germany, 22–26 March 2021. [Google Scholar]
- Zhu, Y.; Wang, S. Efficient Aerial Data Collection With Cooperative Trajectory Planning for Large-Scale Wireless Sensor Networks. IEEE Trans. Commun. 2022, 70, 433–444. [Google Scholar] [CrossRef]
- Osseiran, A.; Boccardi, F.; Braun, V.; Kusume, K.; Marsch, P.; Maternia, M.; Queseth, O.; Schellmann, M.; Schotten, H.; Taoka, H.; et al. Scenarios for 5G mobile and wireless communications: The vision of the METIS project. IEEE Commun. Mag. 2014, 52, 26–35. [Google Scholar] [CrossRef]
- Der Bergh, B.V.; Chiumento, A.; Pollin, S. LTE in the Sky: Trading off Propagation Benefits with Interference Costs for Aerial Nodes. IEEE Commun. Mag. 2016, 54, 44–50. [Google Scholar] [CrossRef]
- Gettinger, D. Drones at Home: Public Safety Drones; Center for the Study of the Drone at Bard College: Annandale-On-Hudson, NY, USA, 2017. [Google Scholar]
- ICT-317669 METIS Project. Scenarios, Requirements and KPIs for 5G Mobile and Wireless System. Available online: https://cordis.europa.eu/docs/projects/cnect/9/317669/080/deliverables/001-METISD11v1pdf.pdf (accessed on 1 April 2022).
- Yang, P.; Cao, X.; Yin, C.; Xiao, Z.; Xi, X.; Wu, D. Proactive Drone-Cell Deployment: Overload Relief for a Cellular Network Under Flash Crowd Traffic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2877–2892. [Google Scholar] [CrossRef]
- Jaziri, A.; Nasri, R.; Chahed, T. Congestion mitigation in 5G networks using drone relays. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016. [Google Scholar]
- Lien, S.Y.; Chen, K.C.; Lin, Y. Toward ubiquitous massive accesses in 3GPP machine-to-machine communications. IEEE Commun. Mag. 2011, 49, 66–74. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T.; Song, J. Connection steering mechanism between mobile networks for reliable UAV’s IoT platform. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Ouahouah, S.; Taleb, T.; Song, J.; Benzaid, C. Efficient offloading mechanism for UAVs-based value added services. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Zeng, Y.; Zhang, R. Energy-Efficient UAV Communication With Trajectory Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned Aerial Vehicle With Underlaid Device-to-Device Communications: Performance and Tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput Maximization for UAV-Enabled Mobile Relaying Systems. IEEE Trans. Commun. 2016, 64, 4983–4996. [Google Scholar] [CrossRef]
- Zhang, J.; Zeng, Y.; Zhang, R. Spectrum and energy efficiency maximization in UAV-enabled mobile relaying. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017. [Google Scholar]
- Series, M. Guidelines for Evaluation of Radio Interface Technologies for IMT-Advanced. Report ITU, no. 2135-1. 2009. Available online: https://www.semanticscholar.org/paper/Guidelines-for-evaluation-of-radio-interface-for/e025b7586cdffb99a281e65211bd13b1d9f6d7b8 (accessed on 1 April 2022).
- 3GPP TR 36.777. Enhanced LTE Support for Aerial Vehicles. 2017. Available online: https://arxiv.org/pdf/1805.00826 (accessed on 1 April 2022).
- Matolak, D.W. Air-ground channels & models: Comprehensive review and considerations for unmanned aircraft systems. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012. [Google Scholar]
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.-C.; Schneckenberger, N. A survey of Air-to-Ground Propagation Channel Modeling for Unmanned Aerial Vehicles. IEEE Commun. Surv. Tutor. 2019, 21, 2361–2391. [Google Scholar] [CrossRef]
- Matolak, D.W.; Sun, R. Air–Ground Channel Characterization for Unmanned Aircraft Systems-Part I: Methods, Measurements, and Models for Over-Water Settings. IEEE Trans. Veh. Technol. 2017, 66, 26–44. [Google Scholar] [CrossRef]
- Daniel, K.; Putzke, M.; Dusza, B.; Wietfeld, C. Three dimensional channel characterization for low altitude aerial vehicles. In Proceedings of the 2010 IEEE International Symposium on Wireless Communication Systems, York, UK, 19–22 September 2010. [Google Scholar]
- Yanmaz, E.; Kuschnig, R.; Bettstetter, C. Channel measurements over 802.11a-based UAV-to-ground links. In Proceedings of the 2011 IEEE GLOBECOM Workshops, Houston, TX, USA, 5–9 December 2011. [Google Scholar]
- Sasloglou, K.; Glover, I.A.; Gazis, V.; Kikiras, P.; Mathioudakis, K.; Andonovic, I. Empirical channel models for optimized communications in a network of unmanned ground vehicles. In Proceedings of the 2013 IEEE International Symposium on Signal Processing and Information Technology, Athens, Greece, 12–15 December 2013. [Google Scholar]
- Wang, J.; Li, Y.; Adege, A.B.; Wang, L.; Jeng, S.; Chen, J. Machine Learning Based Rapid 3D Channel Modeling for UAV Communication Networks. In Proceedings of the 2019 IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2019. [Google Scholar]
- Ghorbel, M.B.; Ghazzai, H.; Kadri, A.; Hossain, M.J.; Menouar, H. Energy-Efficient Management of Unmanned Aerial Vehicles for Underlay Cognitive Radio Systems. IEEE Trans. Green Commun. Netw. 2017, 1, 434–443. [Google Scholar]
- Zhou, Y.; Zhou, F.; Zhou, H.; Ng, D.W.K.; Hu, R.Q. Robust Trajectory and Transmit Power Optimization for Secure UAV-Enabled Cognitive Radio Networks. IEEE Trans. Commun. 2020, 68, 4022–4034. [Google Scholar] [CrossRef]
- Nobar, S.K.; Ahmed, M.H.; Morgan, Y.; Mahmoud, S.A. Resource Allocation in Cognitive Radio-Enabled UAV Communication. IEEE Trans. Cogn. Commun. Netw. 2022, 8, 296–310. [Google Scholar] [CrossRef]
- Zhang, J.; Chuai, G.; Gao, W. Power Control and Clustering-Based Interference Management for UAV-Assisted Networks. Sensors 2020, 20, 3864. [Google Scholar] [CrossRef]
- Liu, X.; Wang, J.; Zhao, N.; Chen, Y.; Zhang, S.; Ding, Z.; Yu, F.R. Placement and Power Allocation for NOMA-UAV Networks. IEEE Wirel. Commun. Lett. 2019, 8, 965–968. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, H.; Hou, S.; Zhao, Z.; Xu, H.; Wu, X.; Xu, Q.; Zhang, R. A Survey on 5G Millimeter Wave Communications for UAV-Assisted Wireless Networks. IEEE Access 2019, 7, 117460–117504. [Google Scholar] [CrossRef]
- Wang, J.; Wang, G.; Chen, G.; Li, B.; Zhou, R.; Zhang, R. Design and optimization for UAV-enabled two-way relaying system with SWIPT. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 214. [Google Scholar] [CrossRef]
- Wang, J.; Li, B.; Wang, G.; Hu, Y.; Schmeink, A. Robust Design for UAV-Enabled Multiuser Relaying System with SWIPT. IEEE Trans. Green Commun. Netw. 2021, 5, 1293–1305. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory Design and Power Control for Multi-UAV Assisted Wireless Networks: A Machine Learning Approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef]
- Bayerlein, H.; De Kerret, P.; Gesbert, D. Trajectory Optimization for Autonomous Flying Base Station via Reinforcement Learning. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018. [Google Scholar]
- Colonnese, S.; Cuomo, F.; Pagliari, G.; Chiaraviglio, L. Q-SQUARE: A Q-learning approach to provide a QoE aware UAV flight path in cellular networks. Ad Hoc Netw. 2019, 91, 101872. [Google Scholar] [CrossRef]
- Dai, H.; Zhang, H.; Hua, M.; Li, C.; Huang, Y.; Wang, B. How to Deploy Multiple UAVs for Providing Communication Service in an Unknown Region? IEEE Wirel. Commun. Lett. 2019, 8, 1276–1279. [Google Scholar] [CrossRef]
- Jailton, J.; Carvalho, T.; Araújo, J.; Francês, R. Relay positioning strategy for traffic data collection of multiple unmanned aerial vehicles using hybrid optimization systems: A FANET-based case study. Wirel. Commun. Mob. Comput. 2017, 2017, 11. [Google Scholar] [CrossRef]
- Wu, J.; Yu, P.; Feng, L.; Zhou, F.; Li, W.; Qiu, X. 3D aerial base station position planning based on deep Q-network for capacity enhancement. In Proceedings of the 2019 IFIP/IEEE Symposium on Integrated Network and Service Management (IM), Arlington, VA, USA, 8–12 April 2019. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).