
An Improved Complete Coverage Path Planning Method for Intelligent Agricultural Machinery Based on Backtracking Method


Abstract
:1. Introduction
1.1. Research Advances of Complete Coverage Path Planning
1.2. Brief Analysis of the CCPP Research
2. Related Technology
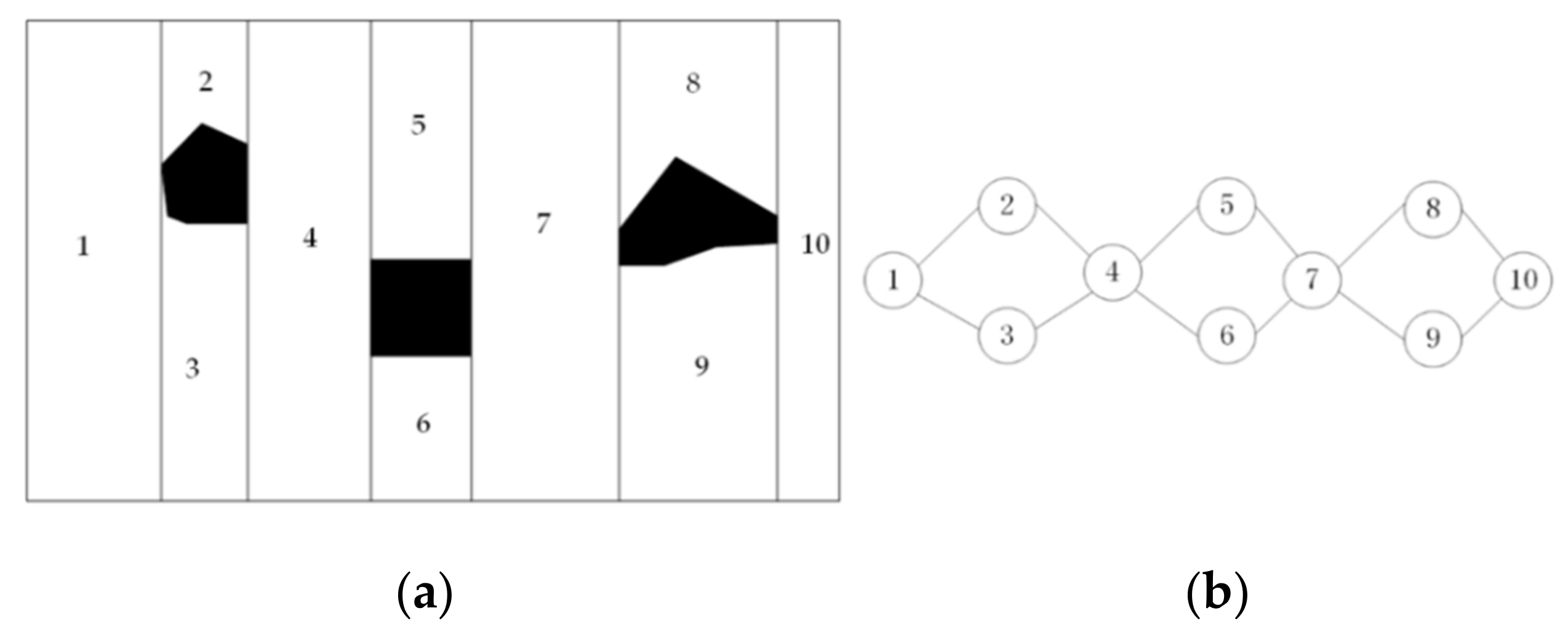
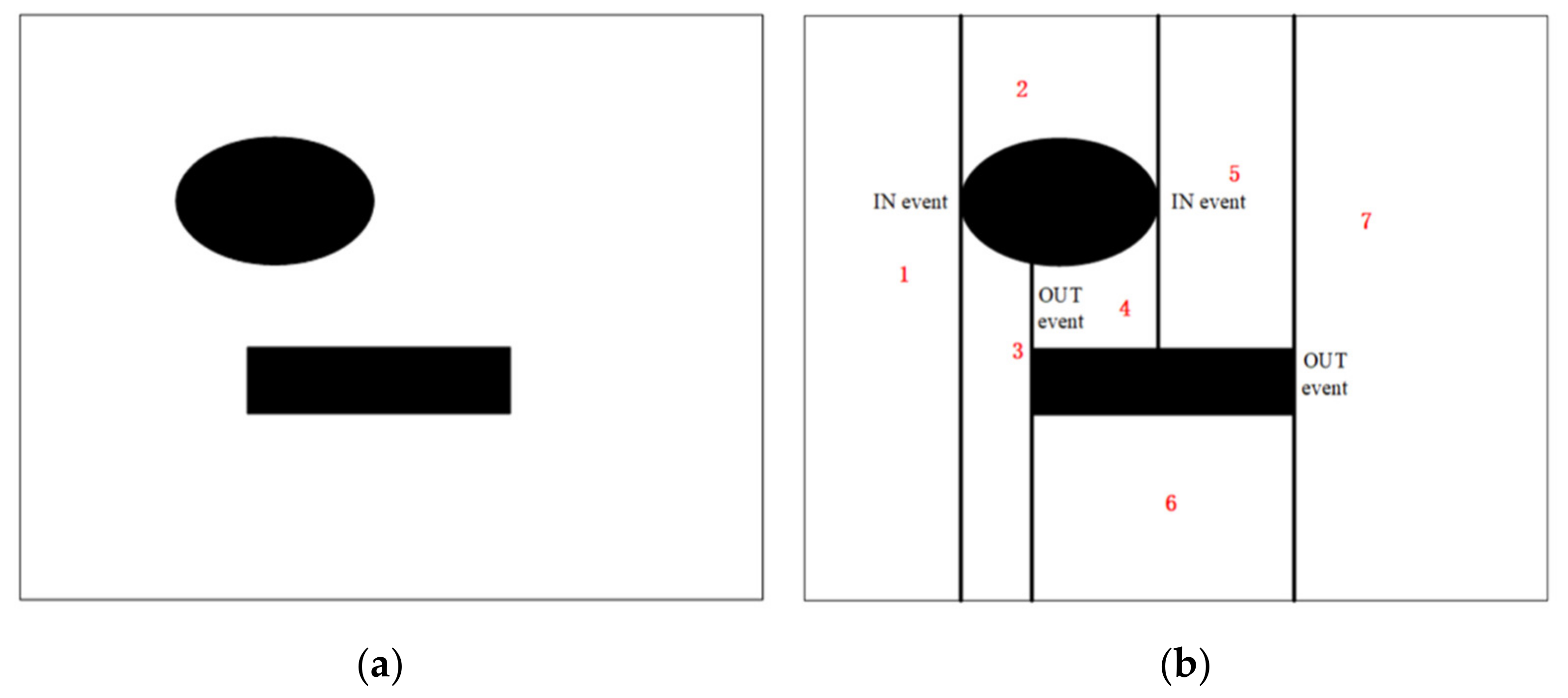
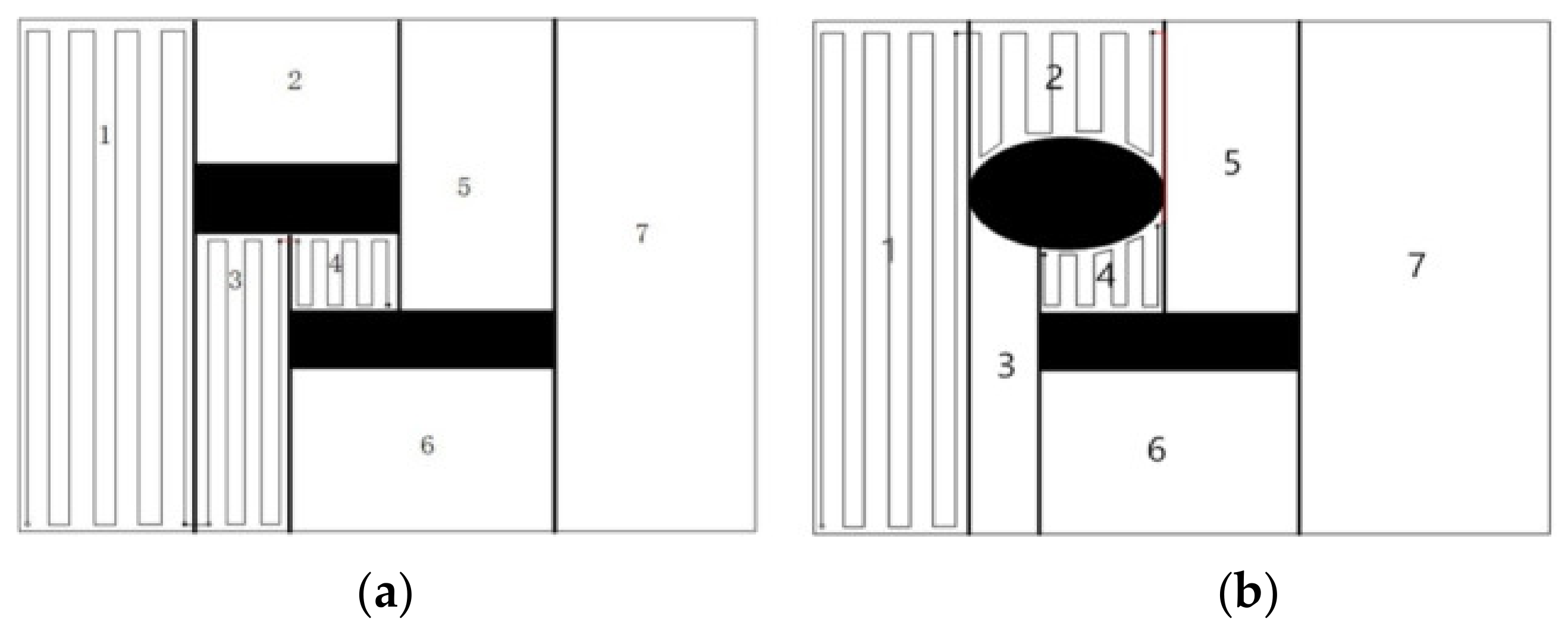
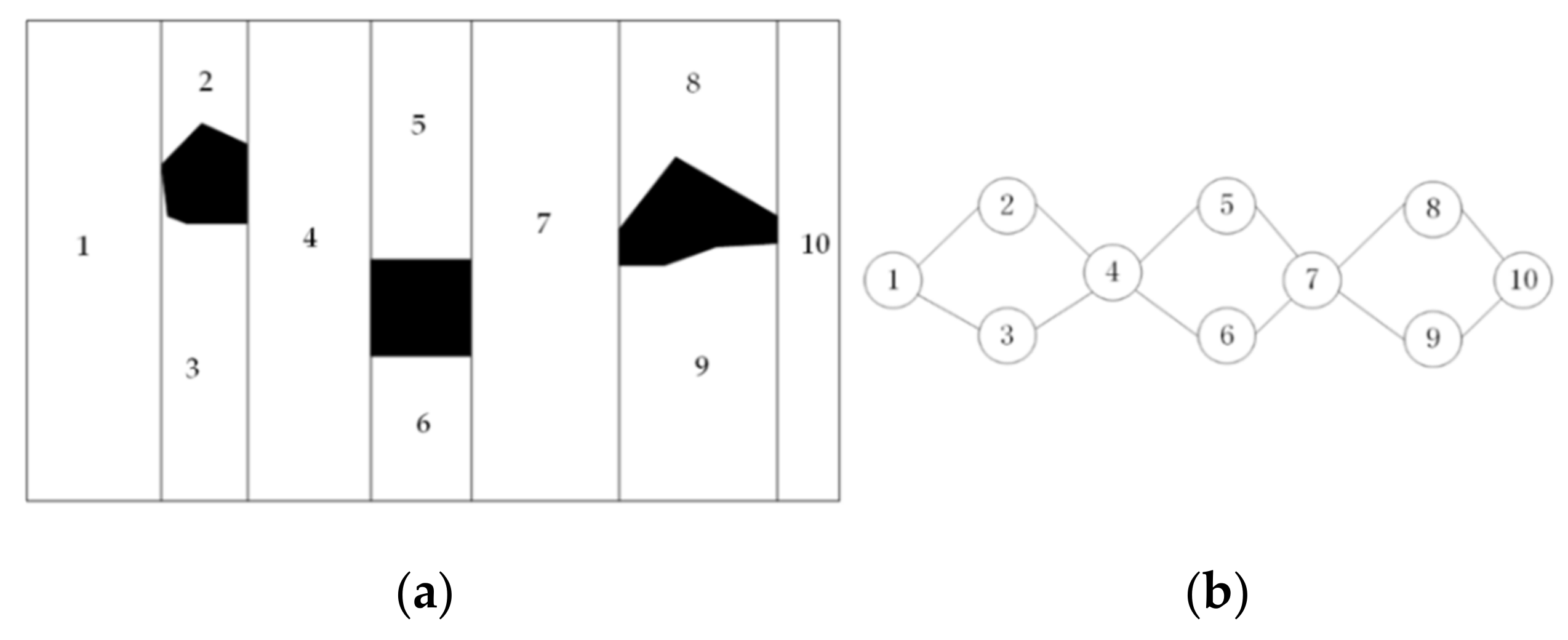
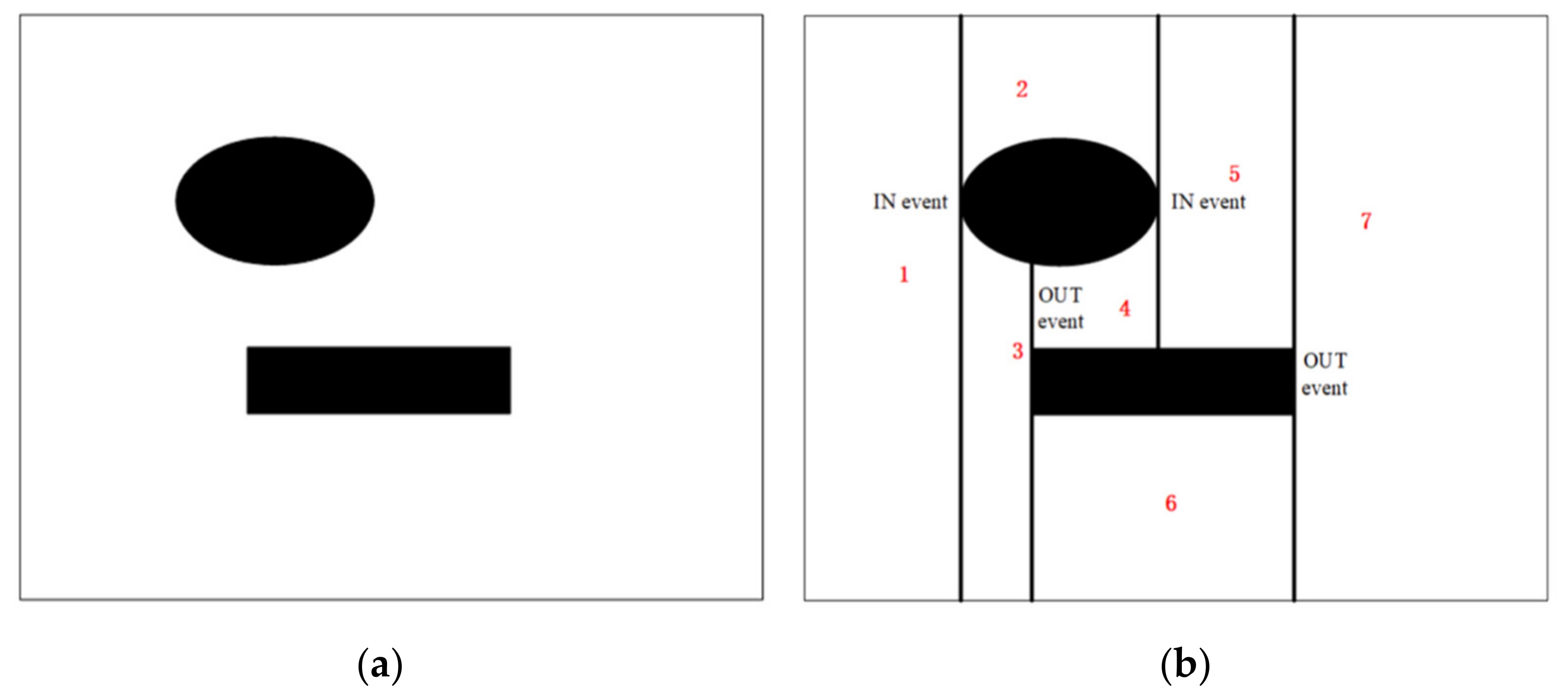
2.1. Morse Decomposition Method
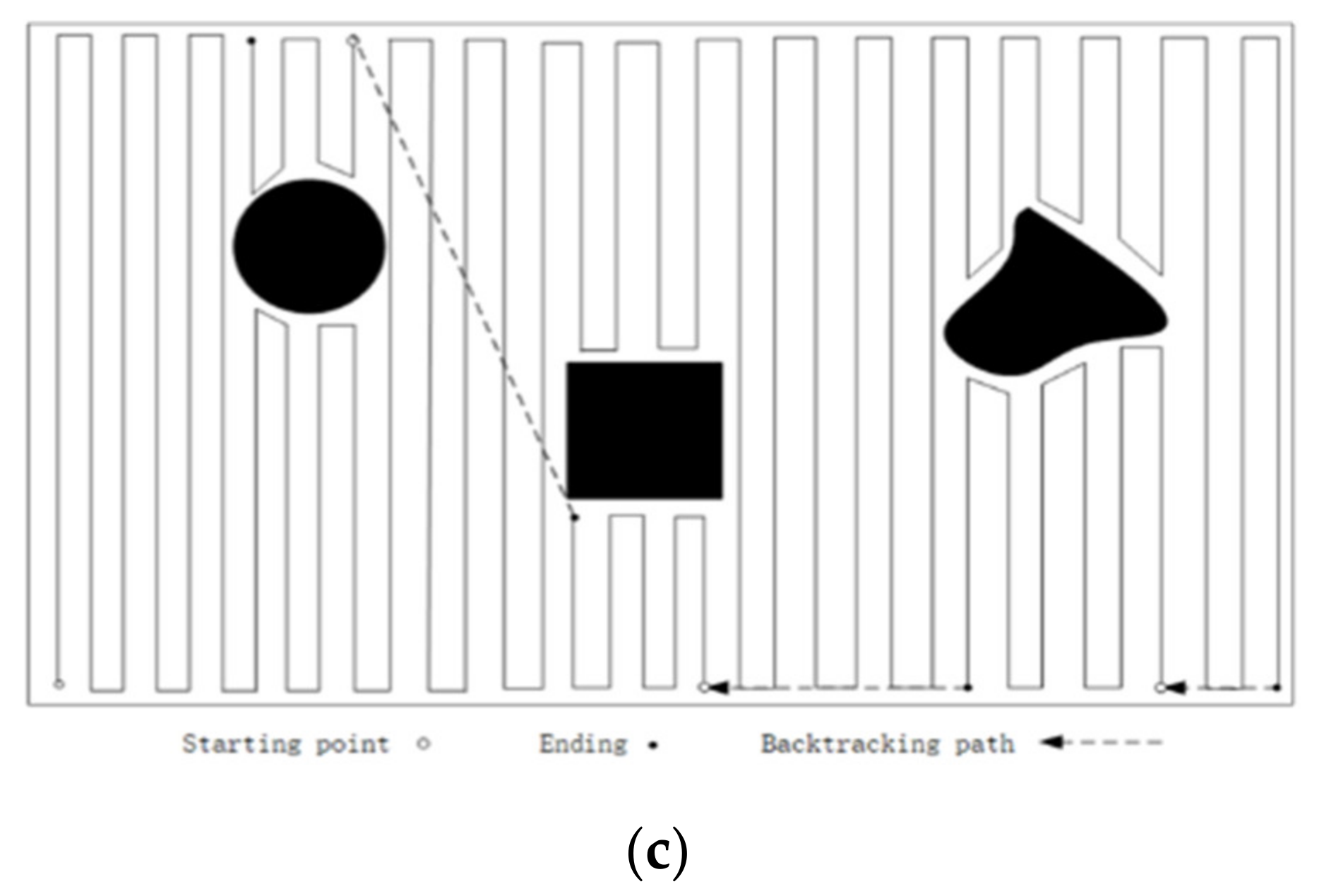
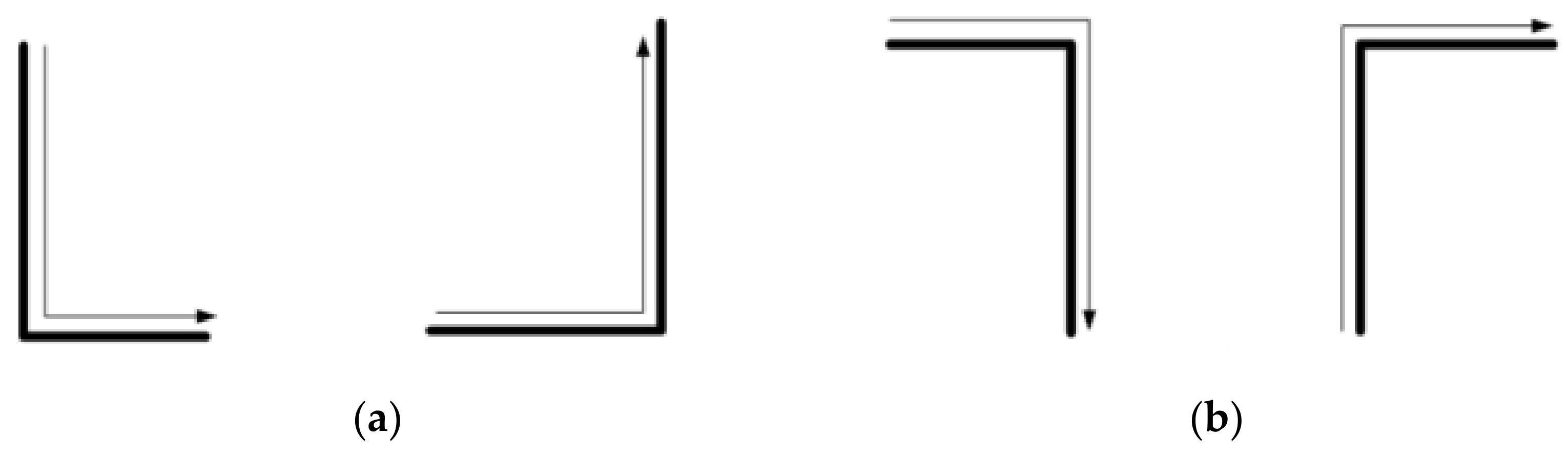
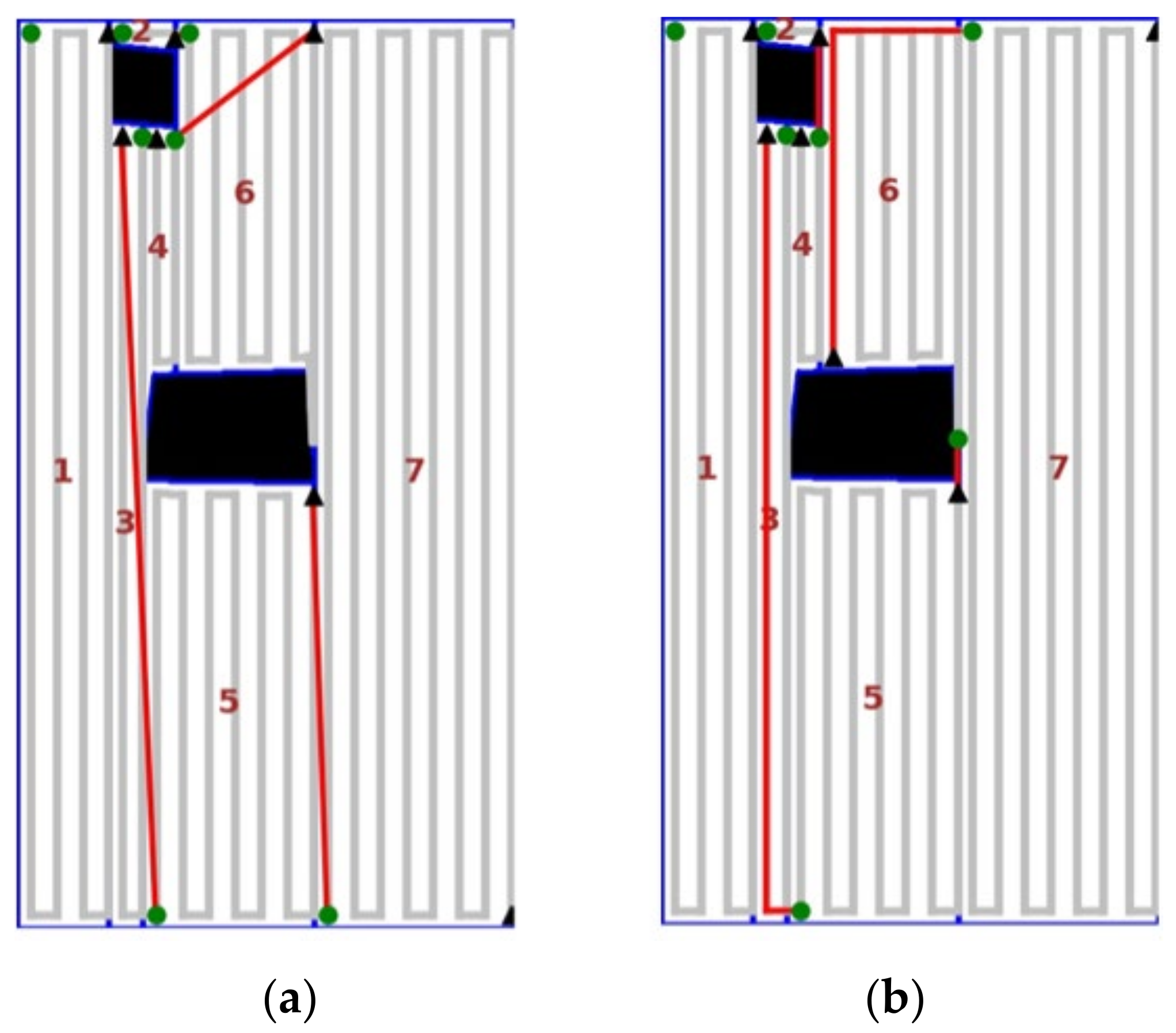
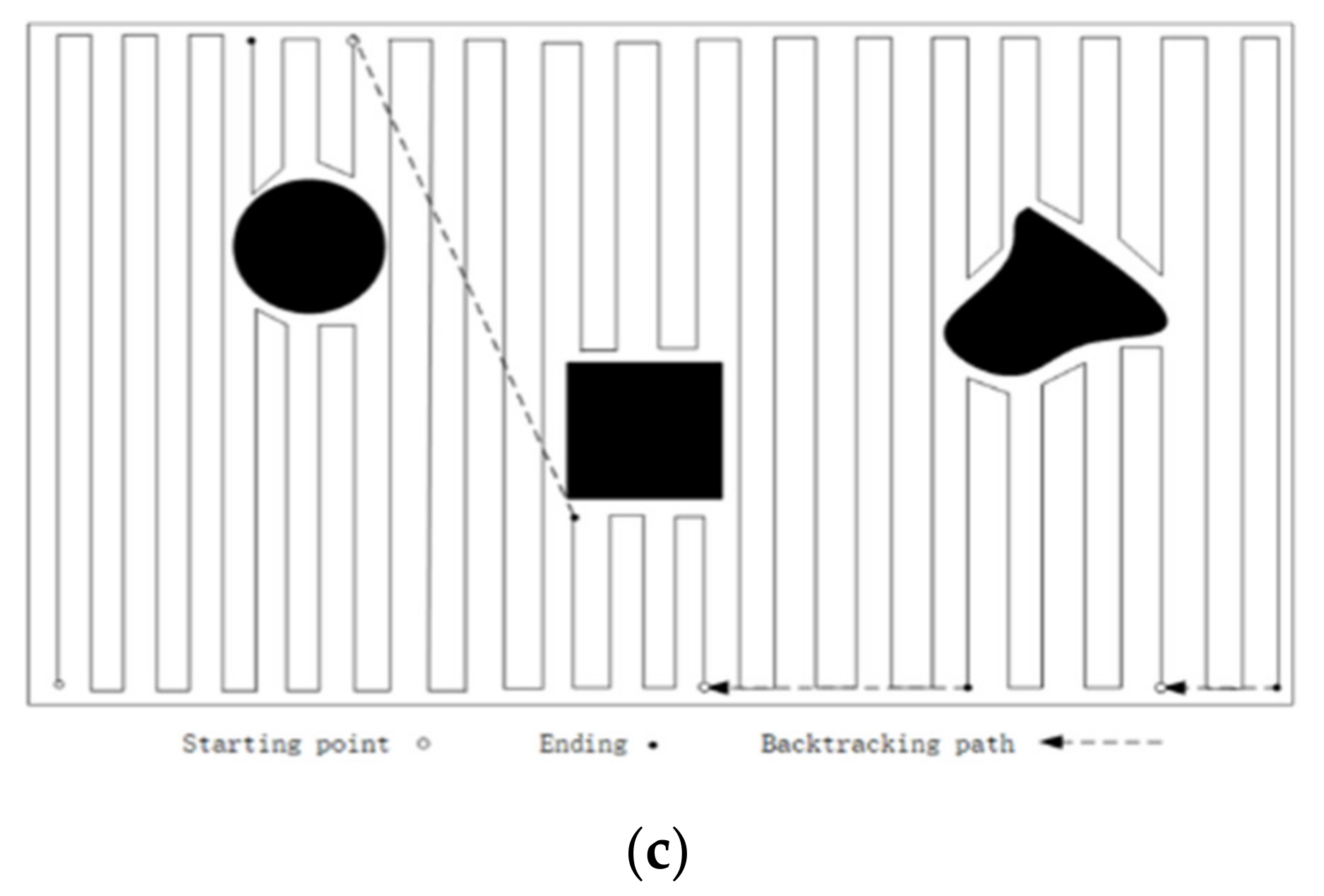
2.2. Backtracking Method
3. Complete Coverage Path Planning with Improved Backtracking Method
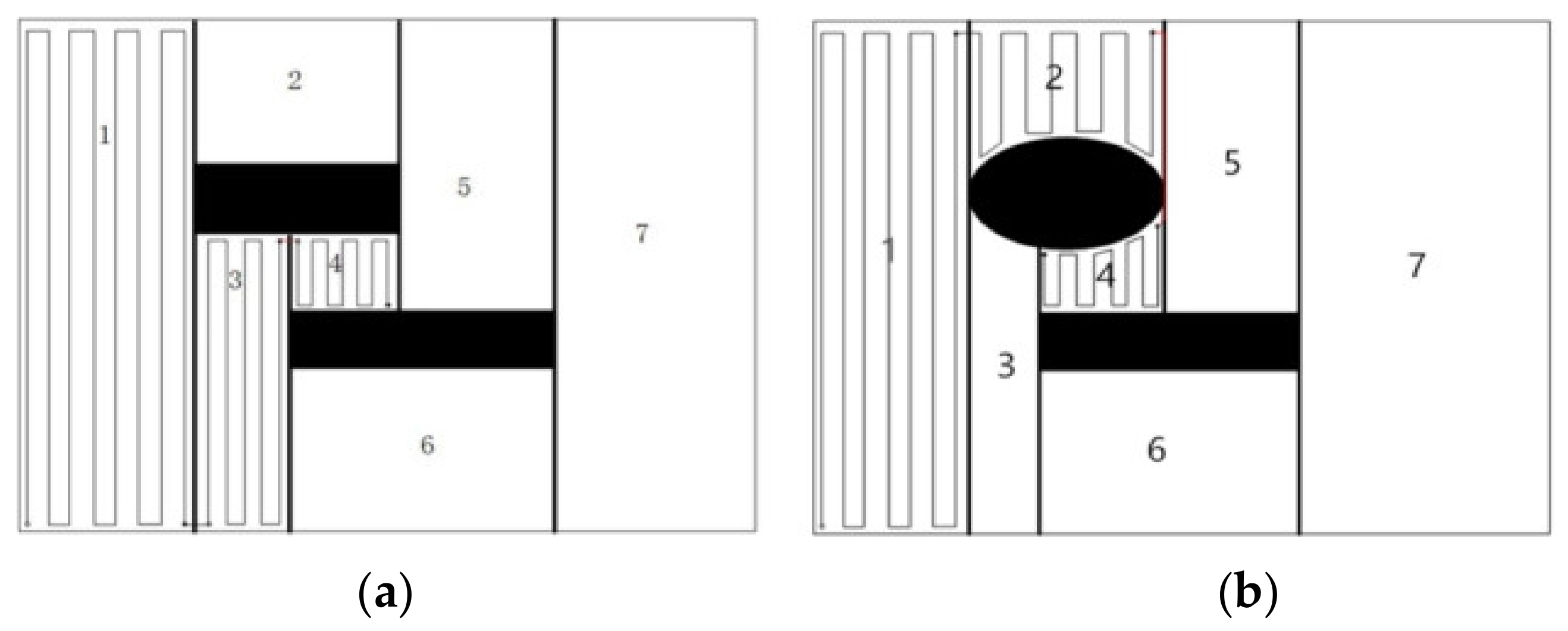
3.1. Regional Decomposition Strategy Based on Morse Theory
| Algorithm 1: Procedure for Morse decomposition |
| BEGIN |
| Input: farmlandmap.jpg |
| Image = mpimg.imread (‘ farmlandmap.jpg’) |
| H,W = image.shape //Length and width of map |
| binary_image = (image > 127) //Binarization |
| Connectivity = 0 //Connectivity |
| connectivity_parts = [] |
| For x in range(binary_image.shape [1]) do |
| current_slice ← binary_image[:, x] |
| connectivity, connective_parts ← calculate_connectivity(current_slice) //Return |
| connectivity and the number of connected regions |
| END For |
| For i in range(last_connectivity) do |
| IF np.sum(adjacency_matrix[i, :]) > 1 THEN //In event |
| For j in range(connectivity) do |
| IF adjacency_matrix[i, j] THEN |
| total_cells_number ← total_cells_number + 1 |
| current_cells[j] ← total_cells_number |
| END IF |
| END For |
| ND IF |
| END For |
| For j in range(connectivity) do |
| IF np.sum(adjacency_matrix[:, j]) > 1 THEN //Out event |
| total_cells_number ← total_cells_number + 1 |
| current_cells[j] ←total_cells_number |
| ELSEIF np.sum(adjacency_matrix[:, j]) = 0 THEN //In event |
| total_cells_number ← total_cells_number + 1 |
| current_cells[j] ← total_cells_number |
| END IF |
| last_connectivity ← connectivity |
| last_cells ← current_cells |
| END For |
| pickle.dump([decomposed, total_cells_number, cells], open(ccpp_test +”/decomposed_result”, “wb”)) //Save partition file |
| decomposed_image = np.zeros([H, W, 3], dtype = np.uint8) //Show split result |
| decomposed_image[decomposed > 0, :] = [255, 255, 255] |
| Output: decomposition_farmlandmap.jpg |
| END Morse decomposition |
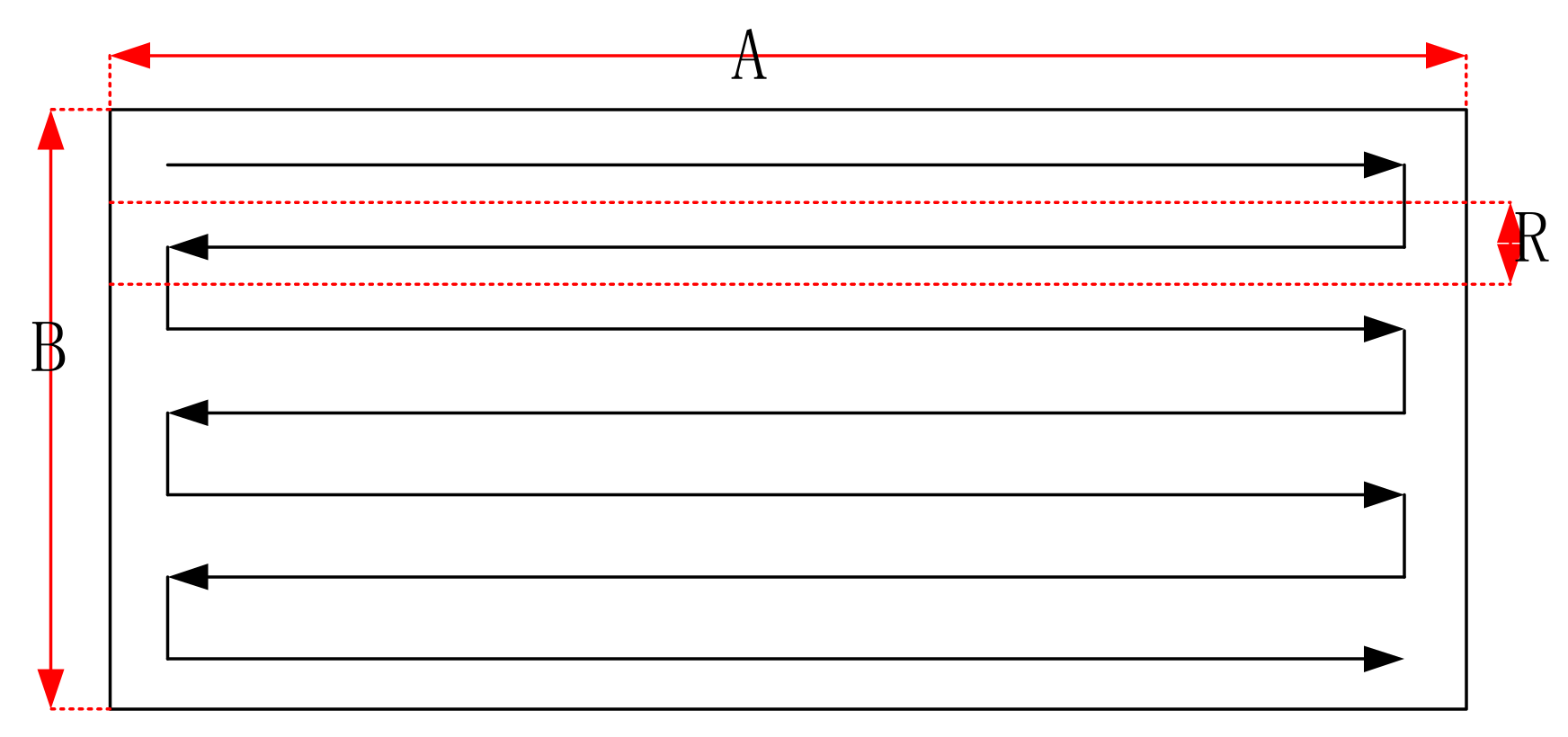
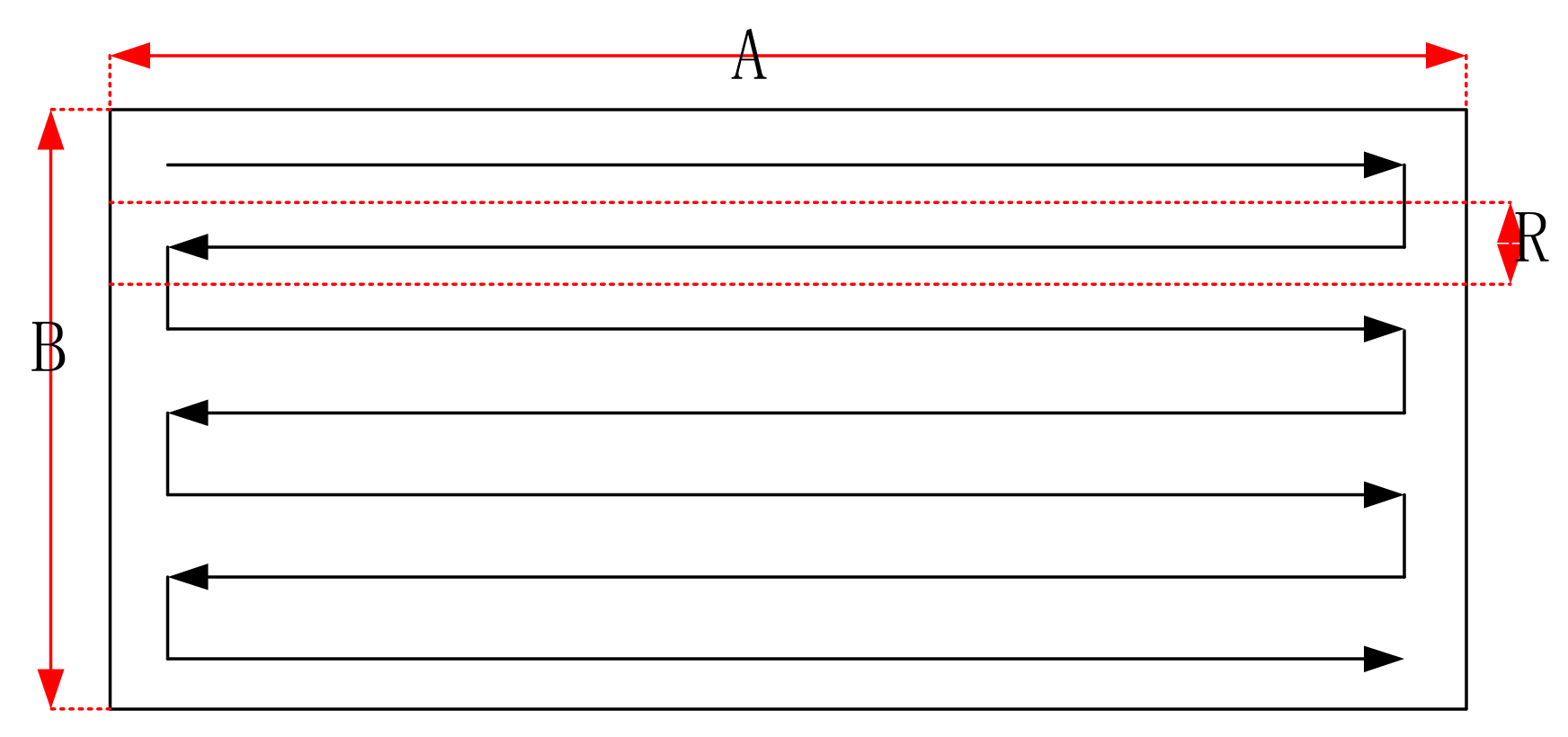
3.2. Complete Coverage Path Planning Method in Sub-Region
3.3. Sub-Region Connection Strategy
3.3.1. Create a Backtracking List
3.3.2. Backtracking Point Selection Principle
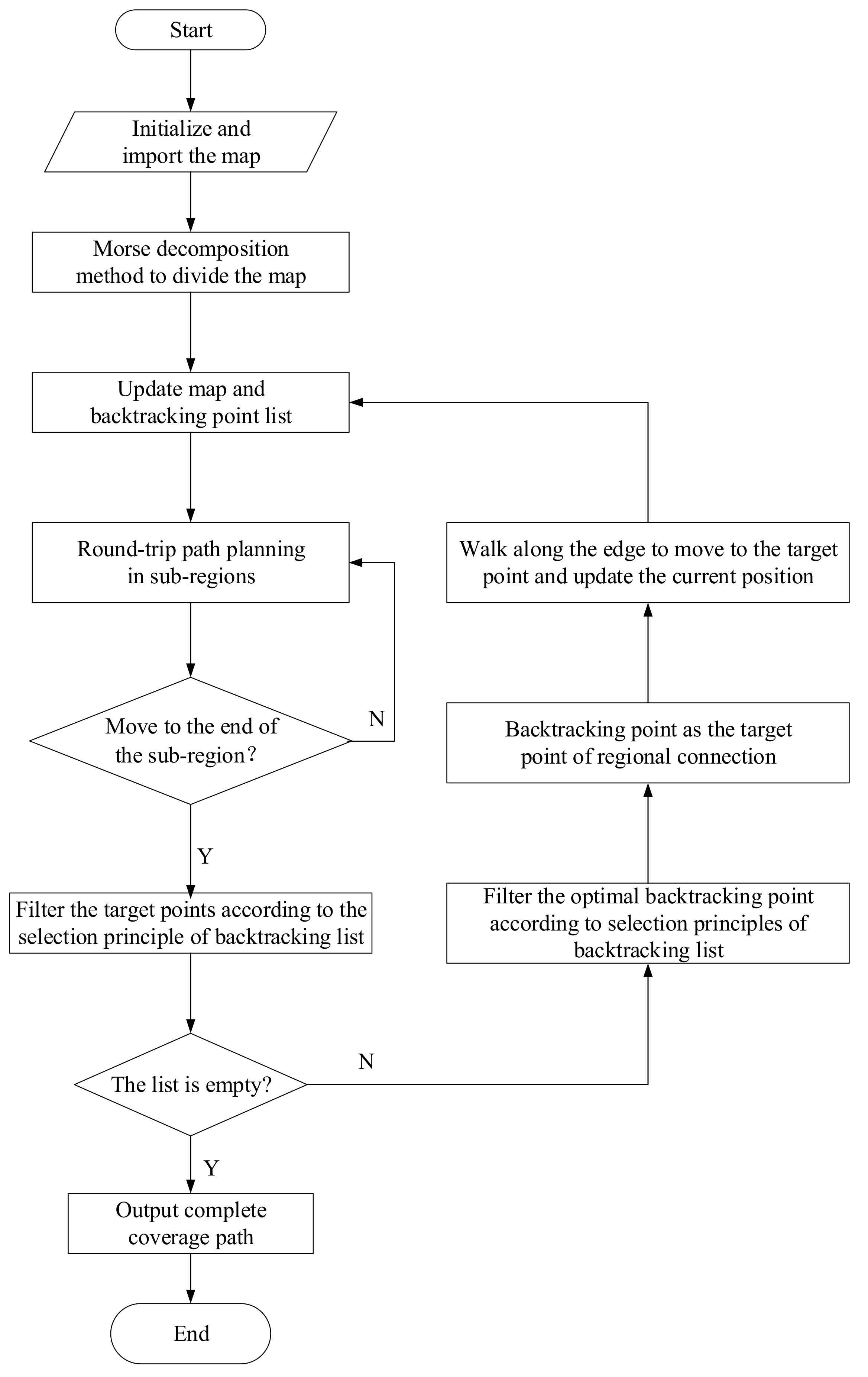
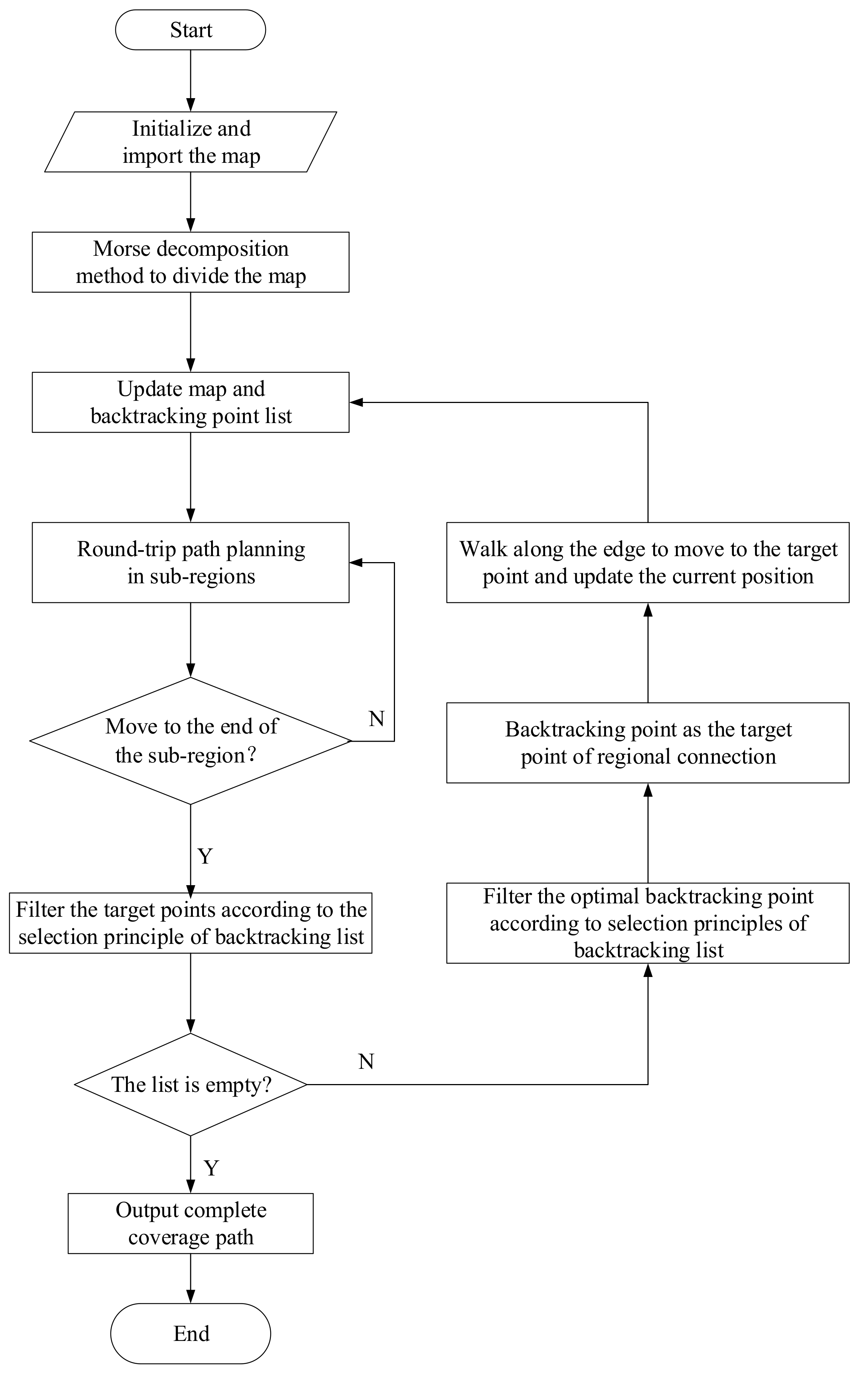
3.4. Method Integration
4. Experiment and Analysis
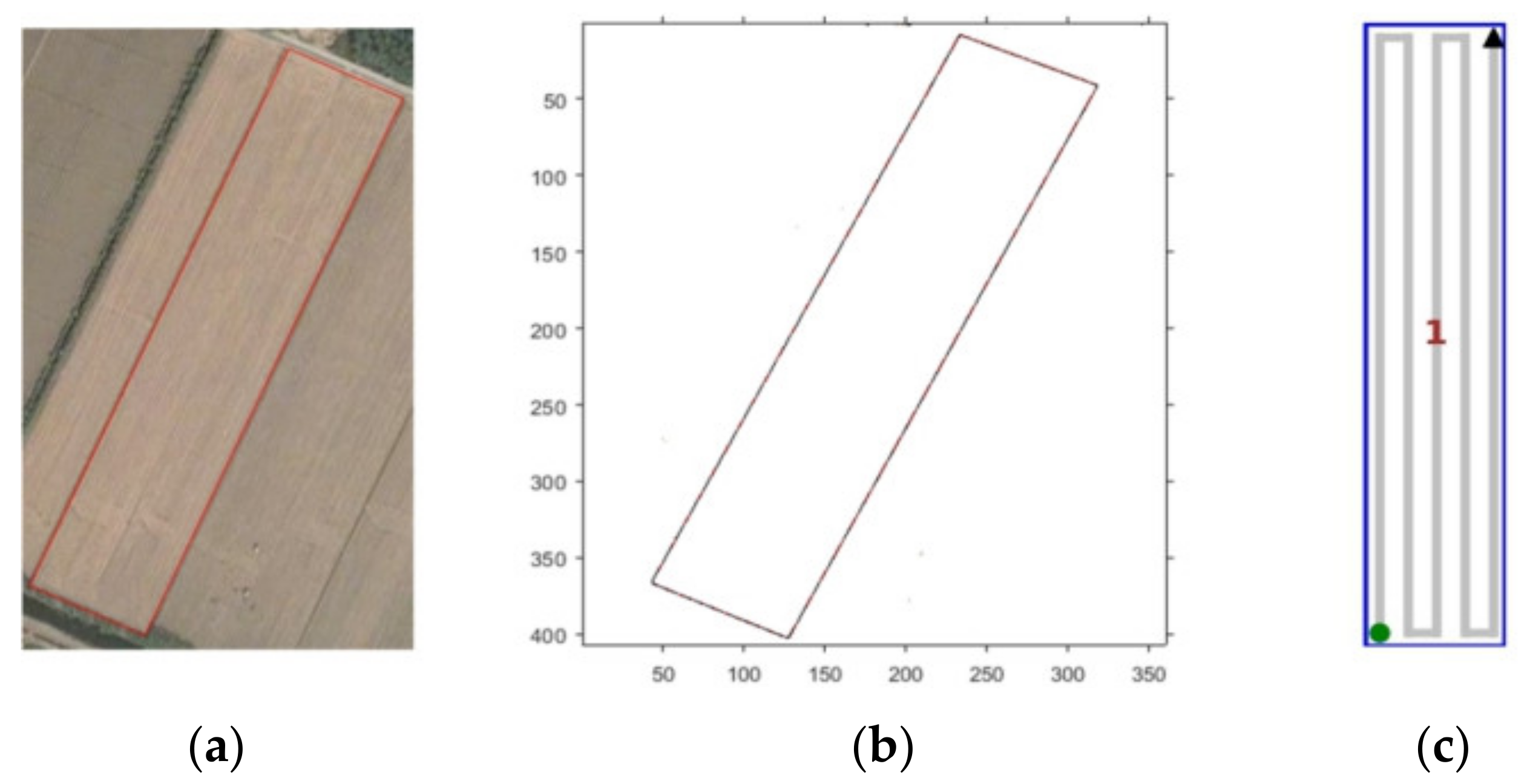
4.1. Experimental Design
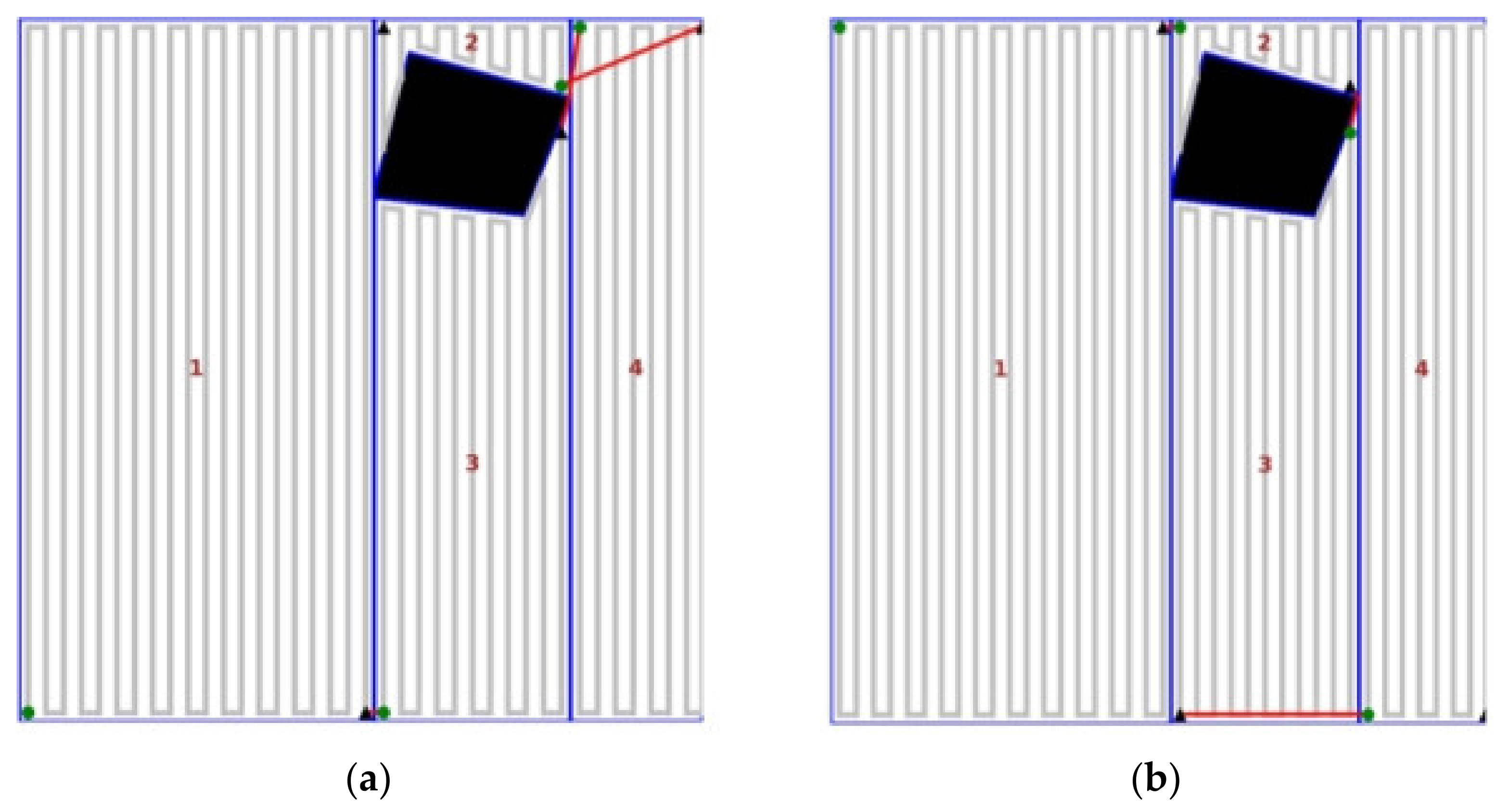
4.2. Complete Coverage Path Planning Simulation Based on Backtracking Method
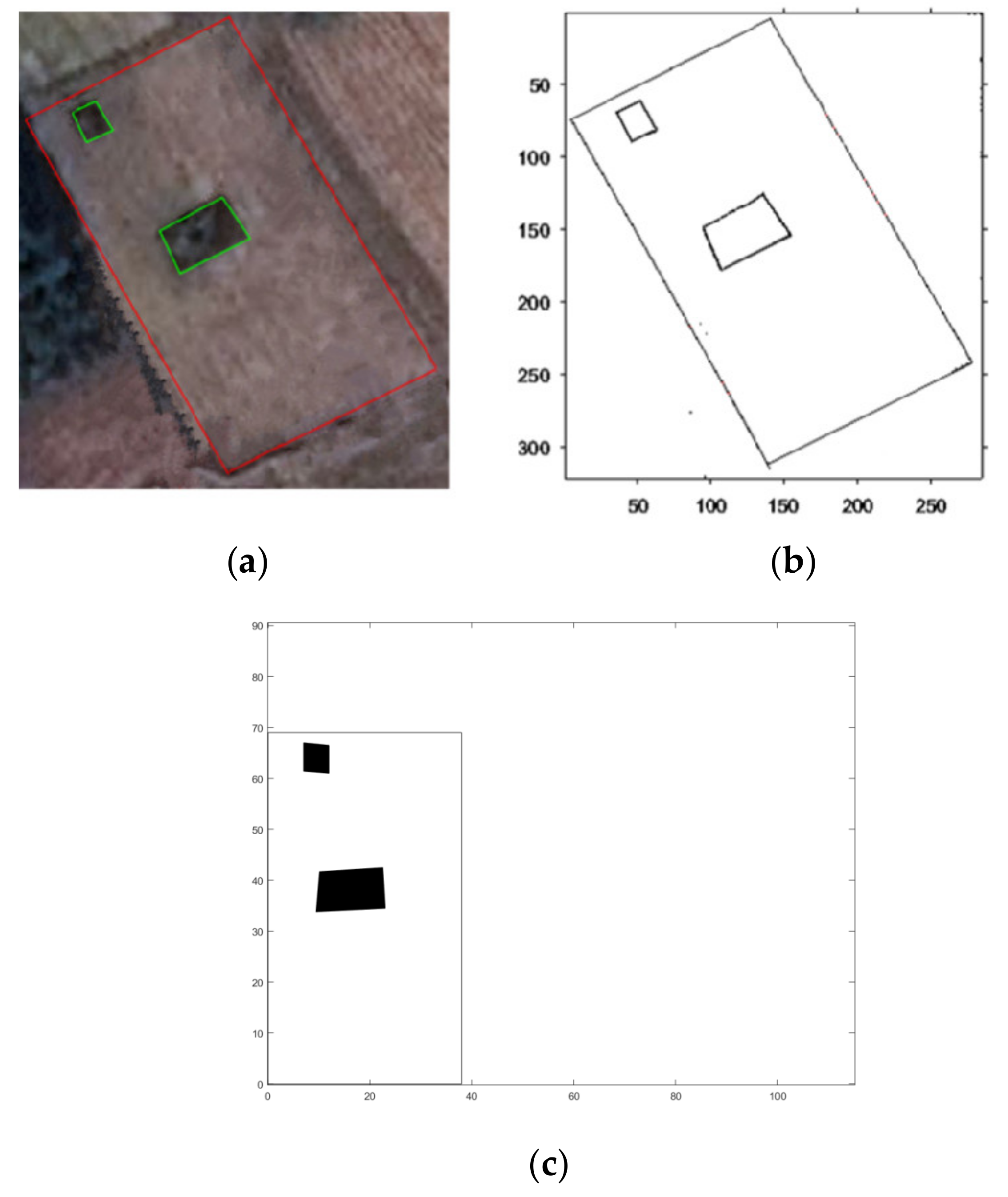
4.2.1. Coordinate System Transformation
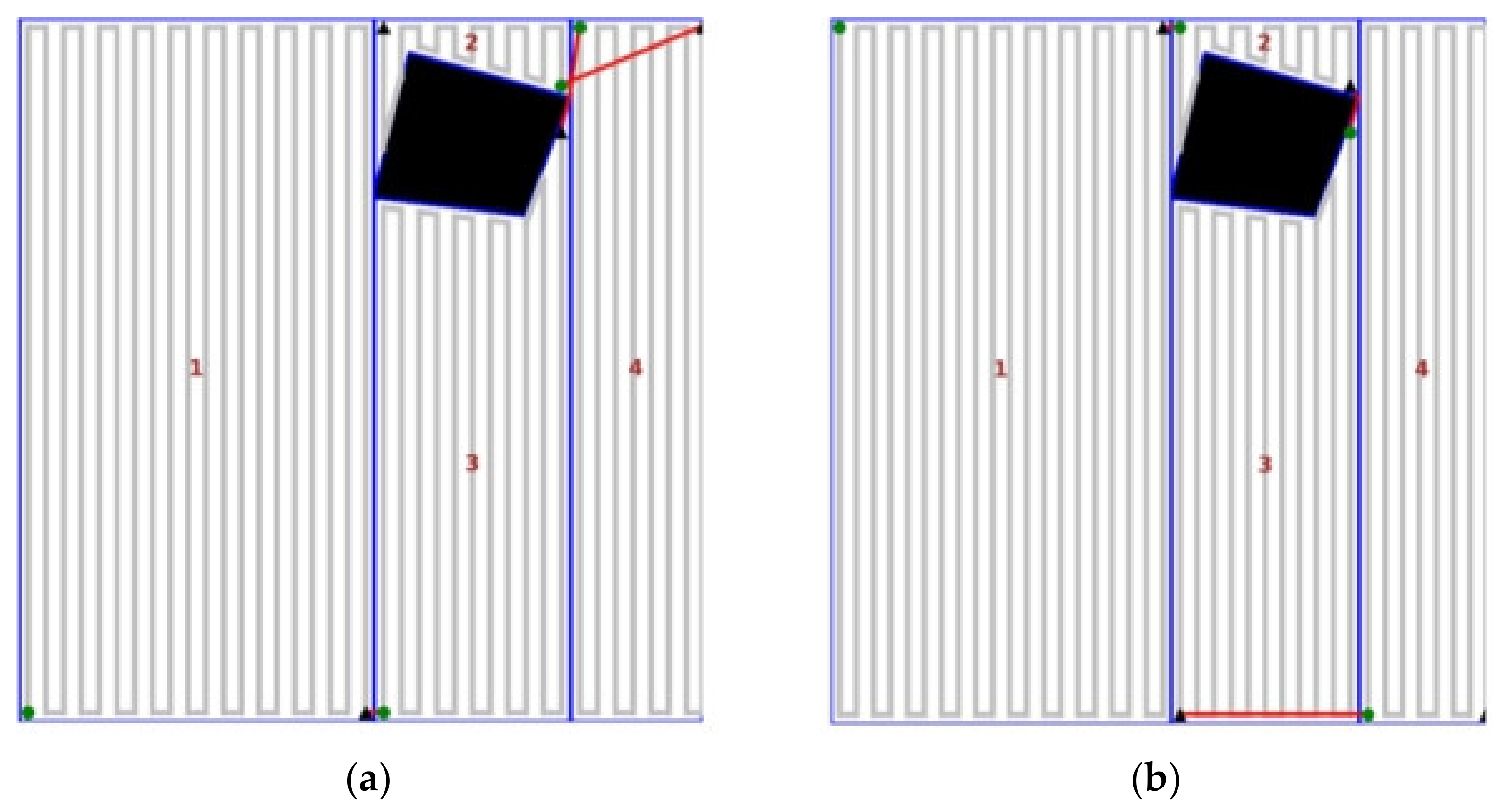
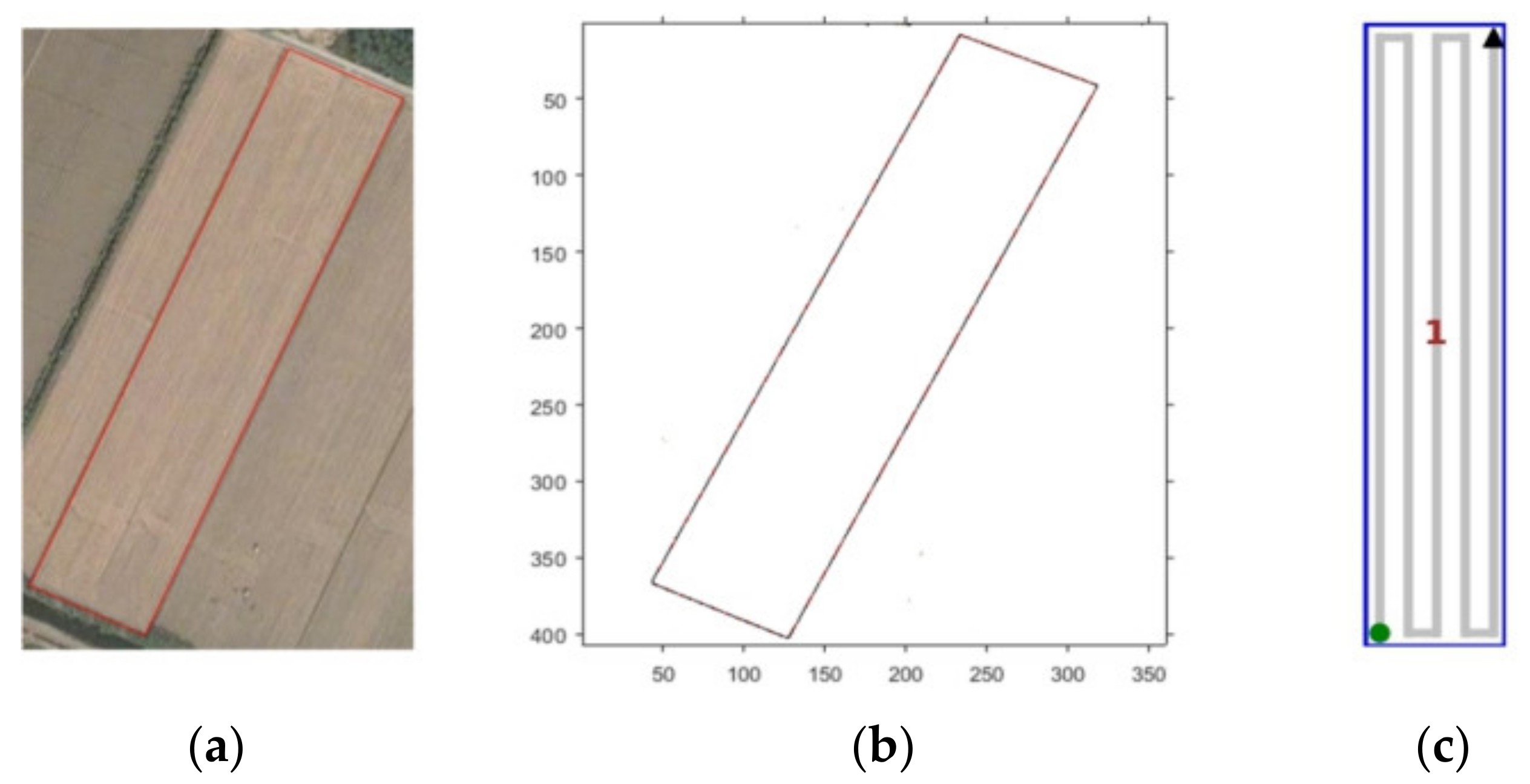
4.2.2. Complete Coverage Path Planning in Simple Regions
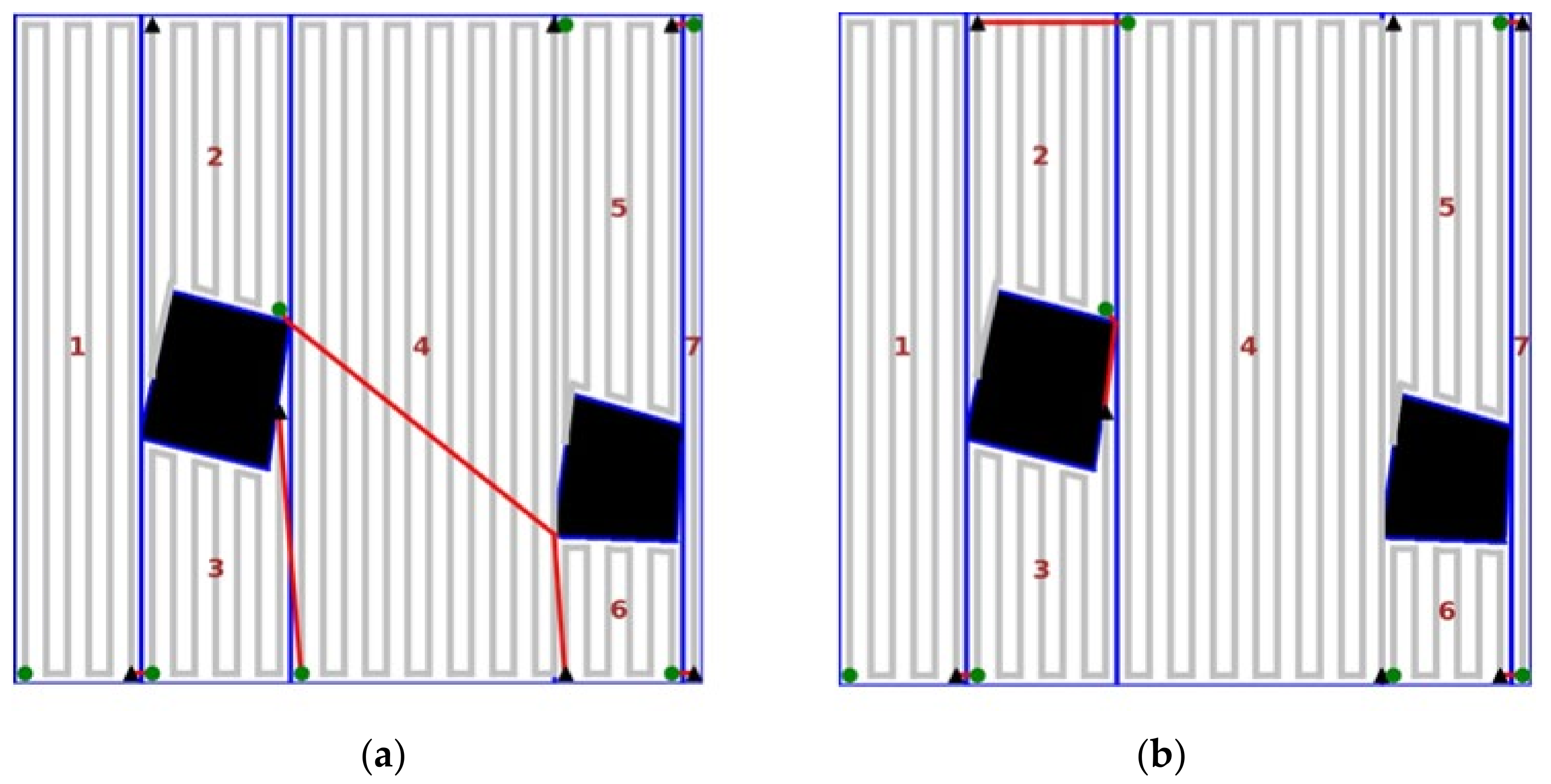
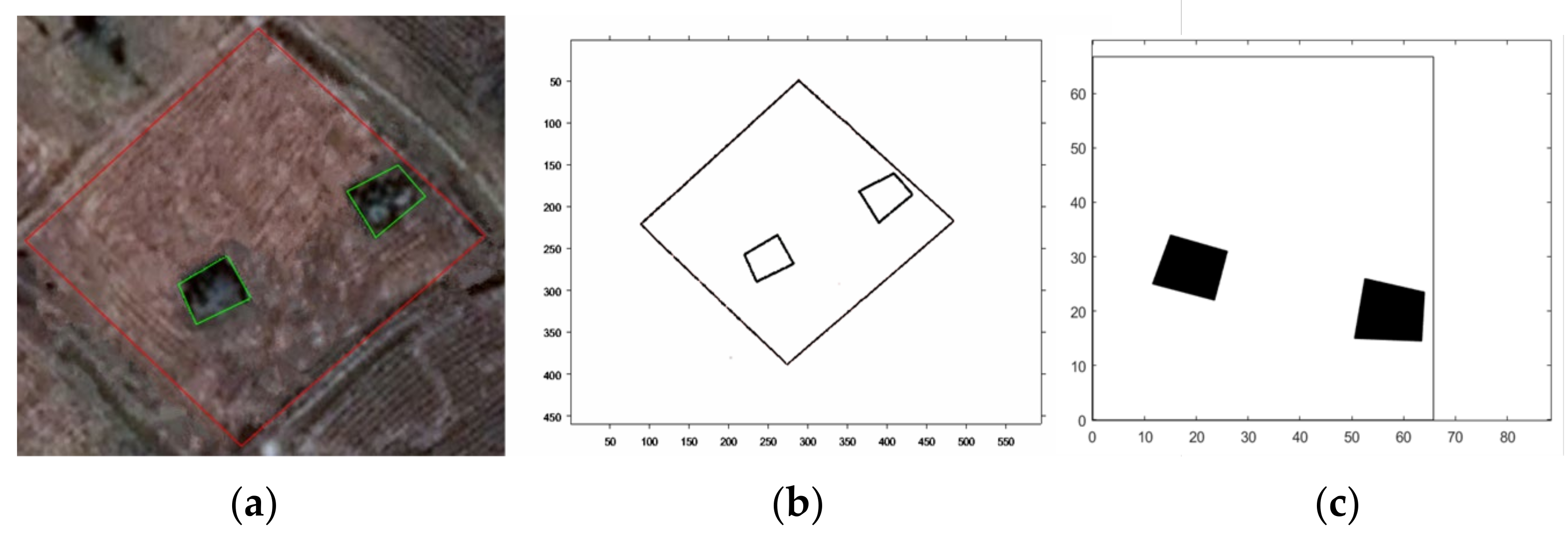
4.2.3. Complete Coverage Path Planning in Complex Regions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, C.L.; Lin, H.Z.; Li, Y.M.; Gong, L.; Miao, Z.H. Analysis on Status and Development Trend of Intelligent Control Technology for Agricultural Equipment. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar]
- Le, A.V.; Ku, P.C.; Than, T.T.; Huu, K.N.N.; Shi, Y.; Mohan, R.E. Realization Energy Optimization of Complete Path Planning in Differential Drive Based Self-Reconfigurable Floor Cleaning Robot. Energies 2019, 12, 1136. [Google Scholar] [CrossRef] [Green Version]
- Morimoto, E.; Hayashi, K. Design of smart agriculture Japan model. Adv. Anim. Biosci. 2017, 8, 713–717. [Google Scholar] [CrossRef]
- Xie, B.; Wu, Z.B.; Mao, E.R. Development and prospect of key technologies on agricultural tractor. Trans. Chin. Soc. Agric. Mach. 2018, 4, 1–17. [Google Scholar]
- Du, Y.F.; Fu, S.H.; Mao, E.R.; Zhu, Z.X.; Li, Z. Development Situation and Prospects of Intelligent Design for Agricultural Machinery. Trans. Chin. Soc. Agric. Mach. 2019, 50, 1–17. [Google Scholar]
- Zhang, M.; Ji, Y.H.; Li, S.C.; Cao, R.Y.; Xu, H.Z.; Zhang, Z.Q. Research Progress of Agricultural Machinery Navigation Technology. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar]
- Dong, S.; Yuan, Z.H.; Gu, C.; Yang, F. Research on intelligent agricultural machinery control platform based on multi-discipline technology integration. Trans. Chin. Soc. Agric. Eng. 2017, 33, 1–11. [Google Scholar]
- Xu, B.; Xu, M.; Chen, L.P.; Tan, Y. Review on Coverage Path Planning Algorithm for Intelligent Machinery. Comput. Meas. Control 2016, 24, 1–5. [Google Scholar]
- Ma, Y.F.; Sun, H.; Ye, P.; Li, C. Mobile robot multi-resolution full coverage path planning algorithm. In Proceedings of the 2018 5th International Conference on Systems and Informatics (ICSAI), Nanjing, China, 10–12 November 2018; pp. 120–125. [Google Scholar]
- Peng, Y.; Bao, L.Z.; Qu, D.; Xie, Y.M. Global Path Planning Algorithm of Multi-Bug. Trans. Chin. Soc. Agric. Mach. 2020, 51, 375–384. [Google Scholar]
- Oksanen, T.; Visala, A. Coverage path planning algorithms for agricultural field machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Deng, Y.; Yang, G.W.; Cui, X.M.; Wu, S.L. Application of Improved Back Propagation Neural Network in Mowing Robot’s Path Planning. Appl. Mech. Mater. 2014, 602, 916–919. [Google Scholar] [CrossRef]
- Khan, A.; Noreen, I.; Ryu, H.; Doh, N.L.; Habib, Z. Online complete coverage path planning using two-way proximity search. Intell. Serv. Robot. 2017, 10, 229–240. [Google Scholar] [CrossRef]
- Hong, L.; Jiayao, M.; Weibo, H. Sensor-based complete coverage path planning in dynamic environment for cleaning robot. CAAI Trans. Intell. Technol. 2018, 3, 65–72. [Google Scholar]
- Xu, B. Research on Route Planning for Plant Protection Unmanned Aerial Vehicles. Ph.D. Thesis, China Agricultural University, Beijing, China, 31 May 2017. [Google Scholar]
- Wang, J.; Chen, J.; Cheng, S.; Cheng, S.; Xie, Y. Double Heuristic Optimization Based on Hierarchical Partitioning for Coverage Path Planning of Robot Mowers. In Proceedings of the International Conference on Computational Intelligence and Security, Wuxi, China, 16–19 December 2016; pp. 186–189. [Google Scholar]
- Nakamura, K.; Nakazawa, H.; Ogawa, J.; Naruse, K. Robot sweep path planning with weak field constrains under large motion disturbance. Artif. Life Robot. 2018, 23, 532–539. [Google Scholar] [CrossRef]
- Cao, X.; Yu, A. Complete-coverage path planning algorithm of mobile robot based on belief function. CAAI Trans. Intell. Syst. 2018, 13, 304–321. [Google Scholar]
- Jian, Y.; Gao, B.; Zhang, Y. Study on a complete coverage path planning method for indoor cleaning robots. Transducer Microsyst. Technol. 2018, 37, 32–34. [Google Scholar]
- Liu, C.Q.; Zhao, X.Y.; Du, Y.F.; Cao, C.; Zhu, Z.X.; Mao, E.R. Research on static path planning method of small obstacles for automatic navigation of agricultural machinery. IFAC Pap. 2018, 51, 673–677. [Google Scholar] [CrossRef]
- Li, K.; Chen, Y.F.; Jin, Z.Y.; Liu, T.; Wang, Z.T.; Zhang, J.Z. A complete coverage path planning algorithm based on backtracking method. Comput. Eng. Sci. 2019, 41, 1227–1235. [Google Scholar]
- Chen, C.Y.; Xiong, H.G.; Tao, Y.; Zou, Y.; Fan, R.; Jiang, S. Coverage path planning method for service robot based on efficient template algorithm and dynamic window approach. Chin. High Technol. Lett. 2020, 30, 945–958. [Google Scholar]
- Wang, Y. Complete Coverage Path Planning of Mobile Robot for Abandoned Mine Land. Master’s Thesis, China University of Mining and Technology, Beijing, China, 2020. [Google Scholar]
- Zhou, L.N.; Wang, Y.; Zhang, X.; Yang, C.Y. Complete coverage path planning of mobile robot on abandoned mine land. Chin. J. Eng. 2020, 42, 1200–1228. [Google Scholar]
- Xu, K.B.; Lu, H.Y.; Huang, Y.H.; Shi, J. Robot Path Planning Based on Double-Layer Ant Colony Optimization Algorithm and Dynamic Environment. Acta Electron. Sin. 2019, 47, 2166–2176. [Google Scholar]
- Song, X.R.; Ren, Y.Y.; Gao, S.; Chen, C.B. Survey on Technology of Mobile Robot Path Planning. Comput. Meas. Control 2019, 27, 1–5. [Google Scholar]
- Jeong, S.; Simeone, O.; Kang, J. Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning. IEEE Trans. Veh. Technol. 2017, 67, 2049–2063. [Google Scholar] [CrossRef] [Green Version]
- Samaniego, F.; Sanchis, J.; García, N.S.; Simarro, R. Recursive Rewarding Modified Adaptive Cell Decomposition (RR-MACD): A Dynamic Path Planning Algorithm for UAVs. Electronics 2019, 8, 306. [Google Scholar] [CrossRef] [Green Version]
- Batsai khan, D.; Janchiv, A.; Lee, S.G. Sensor-Based Incremental Boustrophedon Decomposition for Coverage Path Planning of a Mobile Robot. Intell. Syst. Comput. 2013, 12, 621–628. [Google Scholar]
- Blumenthal, A.; Latushkin, Y. The Selgrade Decomposition for Linear Semiflows on Banach Spaces. J. Dyn. Differ. Equ. 2019, 31, 1427–1456. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.T.; Ji, M. Research on Coordinate Transformation from Local Plane Coordinate System to CGCS2000 Based on Plane Four Parameter Model. Bull. Surv. Mapp. 2018, 0, 74–77. [Google Scholar]
- Peng, X.Q.; Gao, J.X.; Wang, J. Research of the Coordinate Conversion between WGS84 and CGCS2000. J. Geod. Geodyn. 2015, 35, 219–221. [Google Scholar]
- Gong, X.C.; Zhiping, L.; Wang, Y.P.; Hao, L.; Wang, N. Comparison of Calculation Methods of Several Coordinate Transformation. J. Geod. Geodyn. 2015, 35, 697–701. [Google Scholar]
- Deng, Y.H. 2D Coordinate Transformations with Improved Total Least Square Method. J. Geod. Geodyn. 2016, 36, 162–166. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
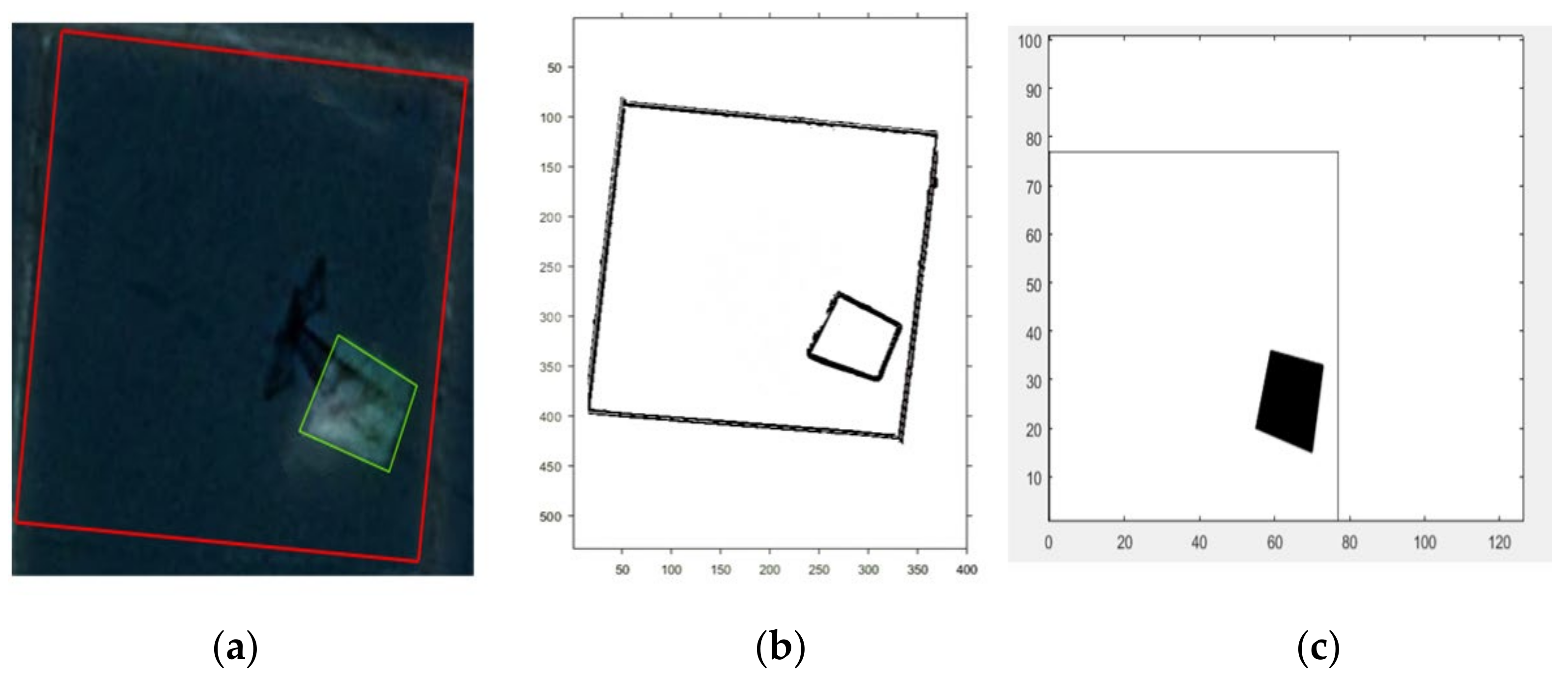
| Geodetic Coordinates of Farmland Area | Plane Coordinates of Farmland Area/m |
|---|---|
| (117.482417, 31.312849) (117.483318, 31.312491) (117.481250, 31.308600) (117.480340, 31.308958) | (10,418,301.47, 3,574,527.66) (10,418,046.35, 3,574,385.17) (10,418,290.09, 3,574,639.22) (10,418,057.64, 3,574,272.57) |
| Geodetic Coordinates of Farmland Area | Geodetic Coordinates of Obstacle |
|---|---|
| (117.522821, 31.334724) (117.523612, 31.334646) (117.523580, 31.333977) (117.522739, 31.334032) | (117.5233953, 31.334298) (117.5235590, 31.334226) (117.5234999, 31.334107) (117.5233149, 31.334163) |
| Plane Coordinates of Farmland Area | Plane Coordinates of Obstacle |
|---|---|
| (10,419,965.04, 3579533.91) (10,419,968.59, 3579611.79) (10,419,929.88, 3579628.13) (10,419,924.50, 3579504.08) | (10,419,946.42, 3,579,585.14) (10,419,943.95, 3,579,605.42) (10,419,936.52, 3,579,598.16) (10,419,937.86, 3,579,575.25) |
| Farmland Mapping Coordinates | Obstacle Mapping Coordinates |
|---|---|
| (0.00, 77.04) (76.29, 77.04) (75.29, 0.00) (0.00, 0.00) | (59.01, 36.20) (73.19, 33.00) (70.10, 15.30) (55.13, 20.00) |
| Geodetic Coordinates of Farmland Area Geodetic | Coordinates of Obstacle 1 | Coordinates of Obstacle 2 |
|---|---|---|
| (117.401770, 32.336933) (117.402282, 32.337332) (117.402810, 32.336922) (117.402242, 32.336562) | (117.402495, 32.337012) (117.402670, 32.337025) (117.402670, 32.337021) (117.402565, 32.336948) | (117.402117, 32.336853) (117.402224, 32.336905) (117.402278, 32.336844) (117.402147, 32.336792) |
| Plane Coordinates of Farmland Area Plane | Coordinates of Obstacle 1 | Coordinates of Obstacle 2 |
|---|---|---|
| (10,475,805.96, 3,563,281.35) (104,75,835.47, 3,563,343.54) (10,475,819.18, 3,563,409.42) (10,475,790.42, 3,563,345.22) | (10,475,820.10, 3,563,370.45) (10,475,823.17, 3,563,391.97) (10,475,822.95, 3,563,391.97) (10,475,817.40, 3,563,379.20) | (10,475,806.03, 3,563,324.24) (10,475,810.41, 3,563,337.31) (10,475,807.66, 3,563,344.09) (10,475,806.94, 3,563,328.07) |
| Farmland Mapping Coordinates Mapping | Coordinates of Obstacle 1 | Coordinates of Obstacle 2 |
|---|---|---|
| (0.00, 66.73) (65.76, 66.73) (65.76, 0.00) (0.00, 0.00) | (50.49, 15.00) (61.50, 14.50) (62.05, 23.50) (52.50, 26.10) | (11.52, 25.10) (23.50, 22.02) (26.00, 31.00) (15.00, 34.10) |
| Geodetic Coordinates of Farmland Area | Geodetic Coordinates of Obstacle 1 | Geodetic Coordinates of Obstacle 2 |
|---|---|---|
| (117.365570, 32.261266) (117.365919, 32.261402) (117.366302, 32.260874) (117.365919, 32.260717) | (117.365646, 32.261252) (117.365689, 32.261280) (117.365715, 32.261234) (117.365671, 32.261215) | (117.365795, 32.261074) (117.365920, 32.261131) (117.365959, 32.261067) (117.365836, 32.261011) |
| Plane Coordinates of Farmland Area Plane | Coordinates of Obstacle1 | Coordinates of Obstacle 2 |
|---|---|---|
| (10,471,027.21, 3,558,980.84) (10,471,039.51, 3,559,023.52) (10,471,014.55, 3,559,071.70) (10,471,000.65, 3,559,024.87) | (10,471,027.42, 3,558,990.27) (10,471,029.57, 3,558,995.50) (10,471,027.29, 3,558,998.72) (10,471,025.63, 3,558,993.32) | (10,471,019.26, 3,559,008.90) (10,471,024.13, 3,559,024.18) (10,471,021.01, 3,559,029.10) (10,471,016.22, 3,559,014.08) |
| Farmland Mapping Coordinates | Mapping Coordinates Obstacle 1 | Mapping Coordinates Obstacle 2 |
|---|---|---|
| (0.00, 69.60) (38.62, 69.60) (38.62, 0.00) (0.00, 0.00) | (7.12, 66.25) (11.80, 62.80) (11.80, 60.60) (7.12, 60.07) | (10.43, 41.70) (22.53, 42.50) (23.50, 34.52) (9.40, 33.81) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Y.; Shao, M.; Wu, Y.; Zhang, X. An Improved Complete Coverage Path Planning Method for Intelligent Agricultural Machinery Based on Backtracking Method. Information 2022, 13, 313. https://doi.org/10.3390/info13070313
Han Y, Shao M, Wu Y, Zhang X. An Improved Complete Coverage Path Planning Method for Intelligent Agricultural Machinery Based on Backtracking Method. Information. 2022; 13(7):313. https://doi.org/10.3390/info13070313
Chicago/Turabian StyleHan, Yonglian, Min Shao, Yunzhi Wu, and Xiaoming Zhang. 2022. "An Improved Complete Coverage Path Planning Method for Intelligent Agricultural Machinery Based on Backtracking Method" Information 13, no. 7: 313. https://doi.org/10.3390/info13070313
APA StyleHan, Y., Shao, M., Wu, Y., & Zhang, X. (2022). An Improved Complete Coverage Path Planning Method for Intelligent Agricultural Machinery Based on Backtracking Method. Information, 13(7), 313. https://doi.org/10.3390/info13070313