
Double-Layer Mobile Edge Computing-Enabled Power Line Inspection in Smart Grid Networks


Abstract
:1. Introduction
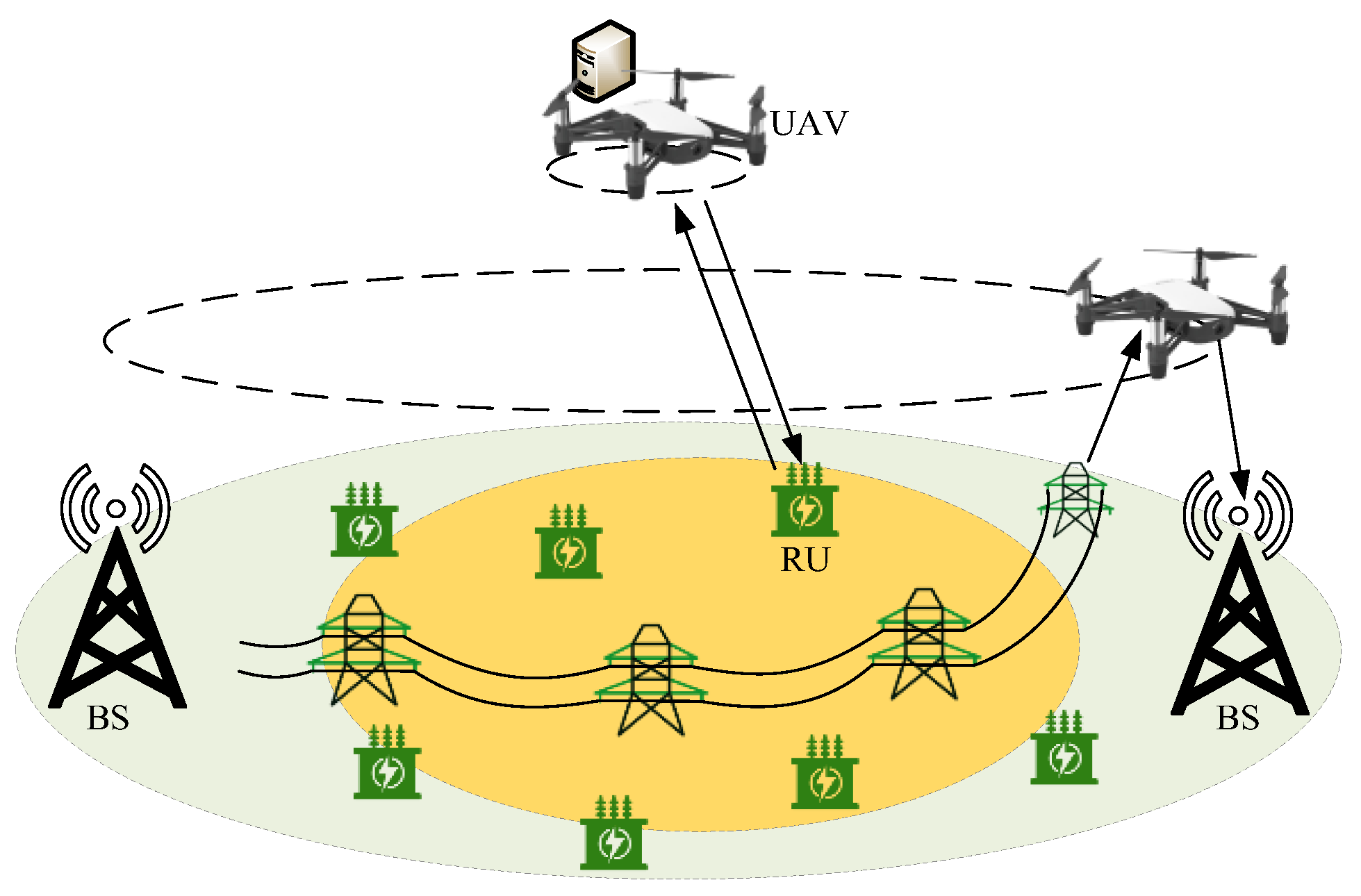
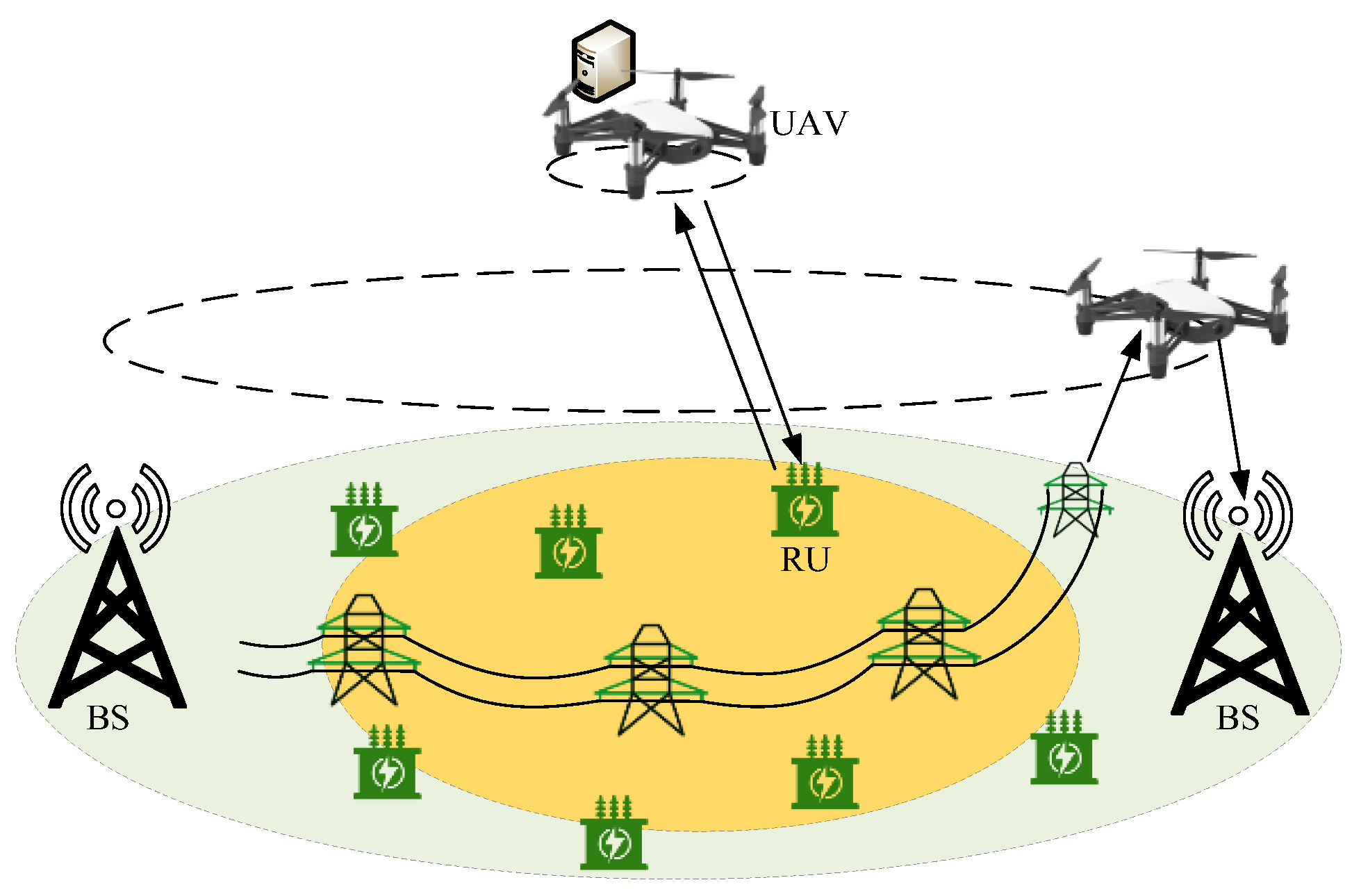
- A double-layer MEC-enabled power line inspection scheme is proposed in this paper. In the upper-level layer, several UAVs equipped with MEC servers can locally process inspection videos with higher propriety, while the remaining tasks with lower priority can be processed by the terrestrial base stations.
- An integer linear programming problem is formulated to jointly optimize the accessed RUs’ priority and the transmission energy consumption. The problem is solved by the proposed alternating optimization algorithm.
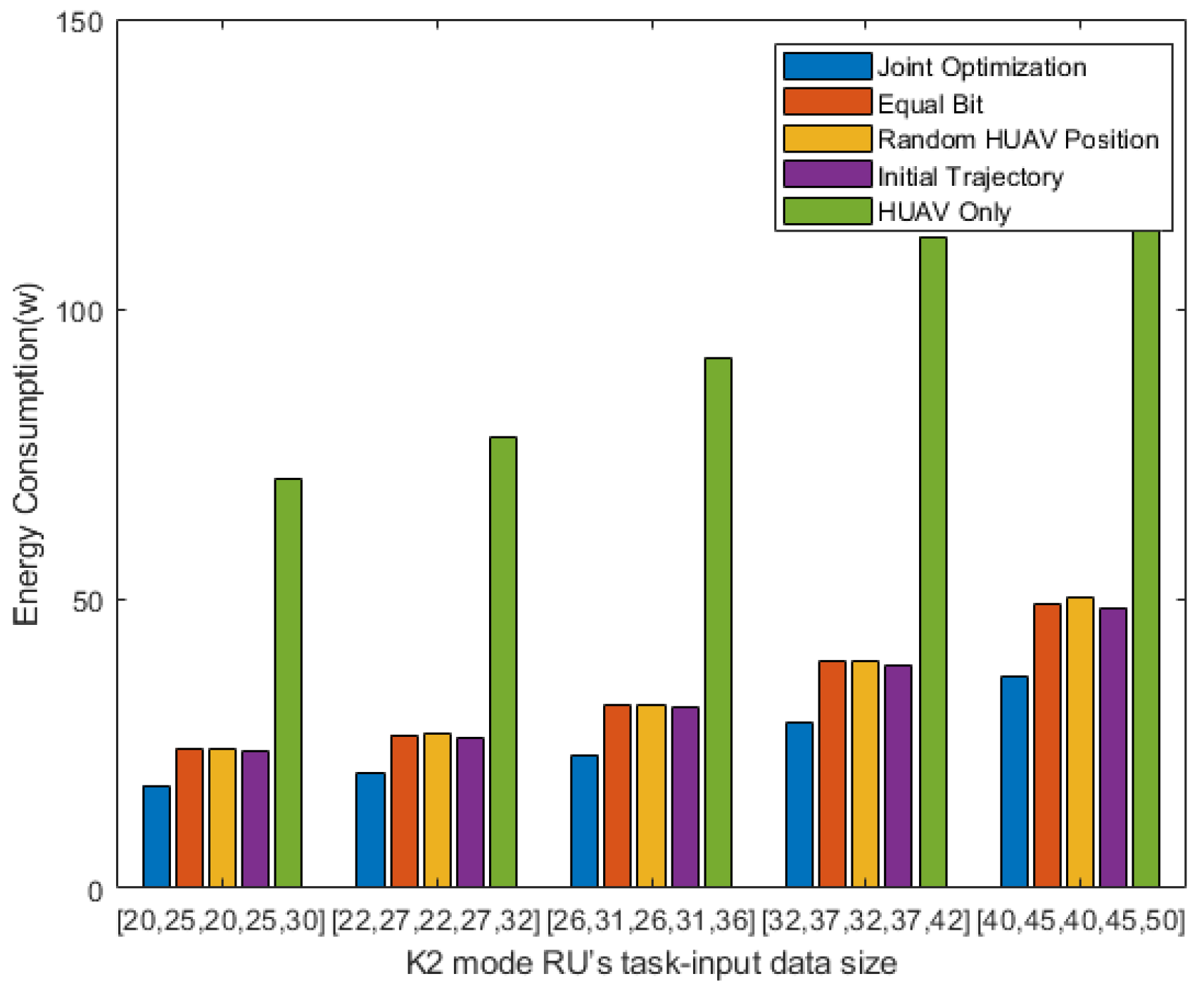
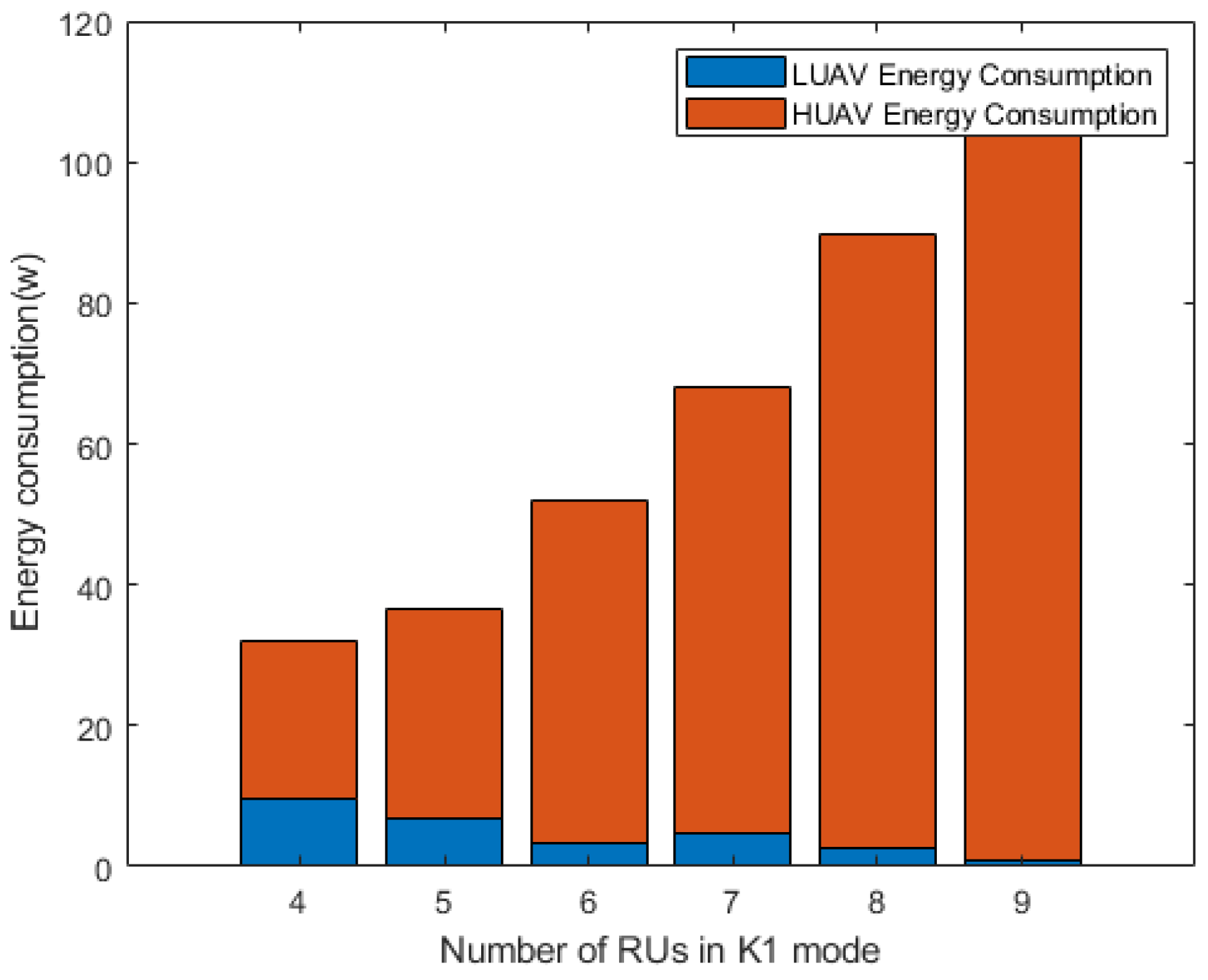
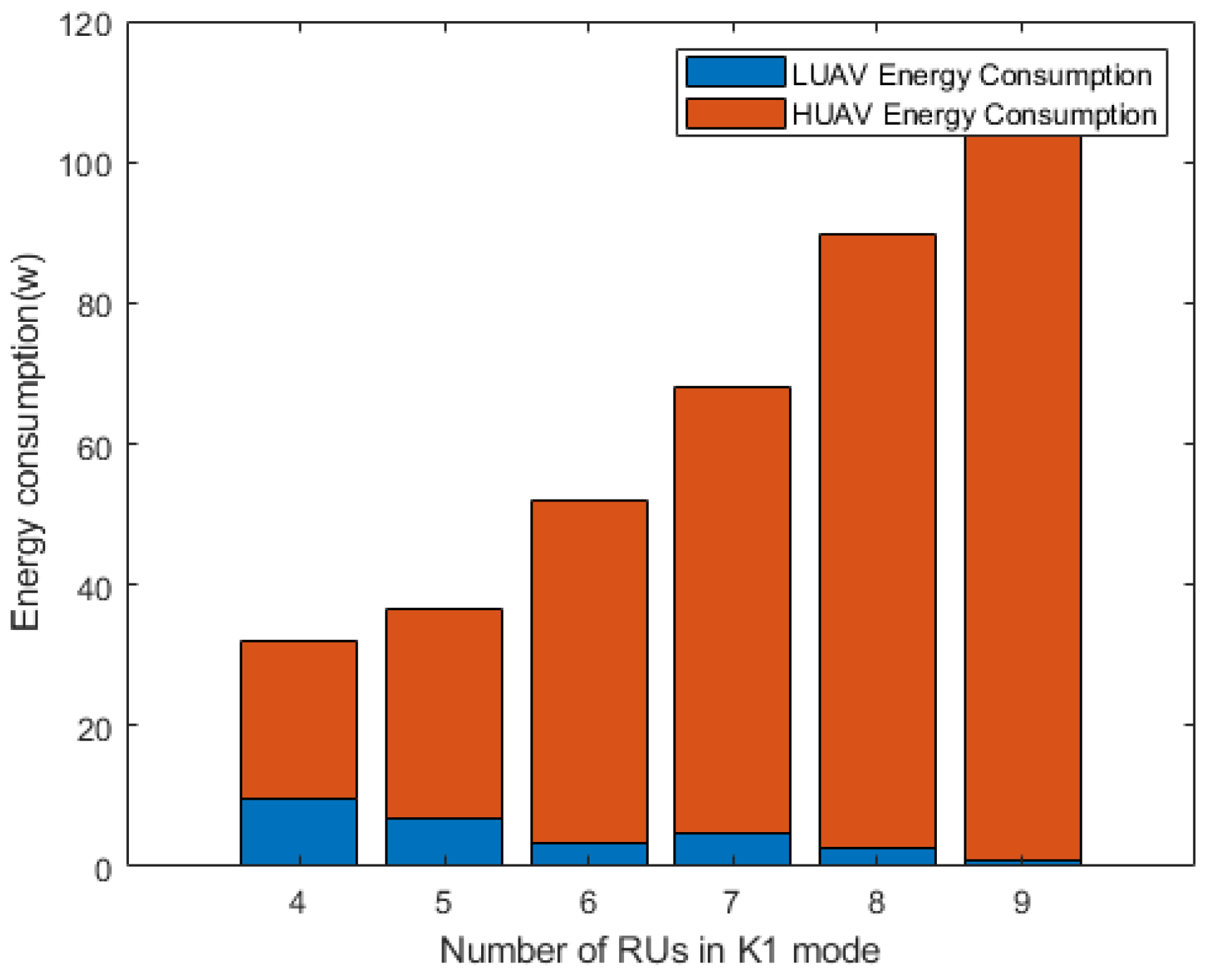
- The results of the simulation show that the proposed scheme can significantly reduce the energy consumption of the considered system.
2. Related Works
3. System Model
3.1. Communication Model
3.2. Computing Model
- (1)
- Offloading to Upper UAV
- (2)
- Offloading to Lower UAV
4. Problem Formulation
5. Proposed Algorithm
5.1. Resource Allocation of Upper UAV
5.2. Location Optimization of Upper UAV
5.3. Joint Optimization of Lower UAVs
- (1)
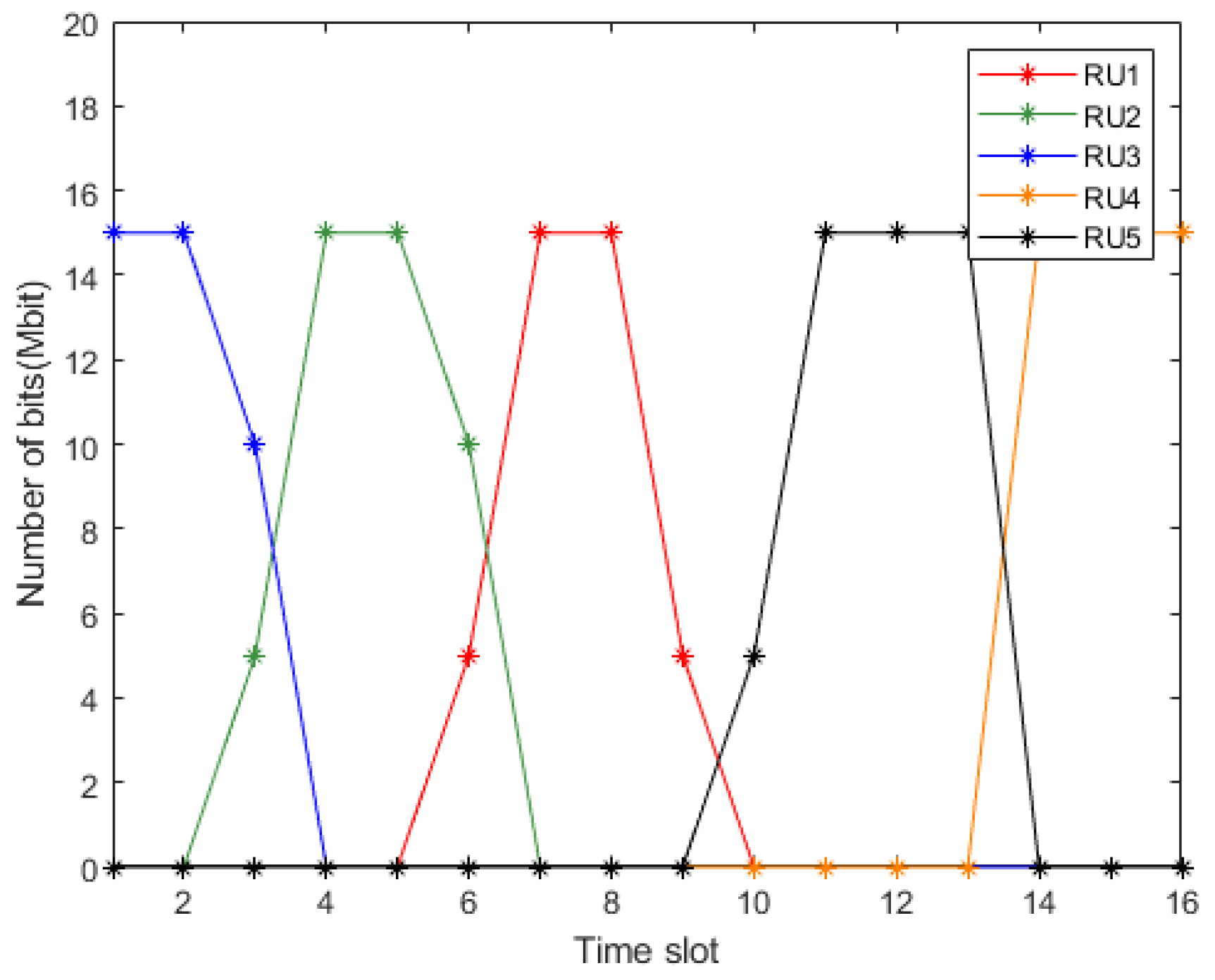
- Bit optimization sub-problem
| Algorithm 1. Time Resource Allocation Optimization. |
| 1: Initialize , the error tolerance threshold , and index of iteration ; 2: The energy distribution of the upper UAV is obtained by (13); 3: The position of the upper UAV is obtained by (14), and then the minimum energy consumption of the upper UAV is obtained; 4: repeat 5: Obtain with thorough (16); Obtain with thorough (18) ; until . |
- (2)
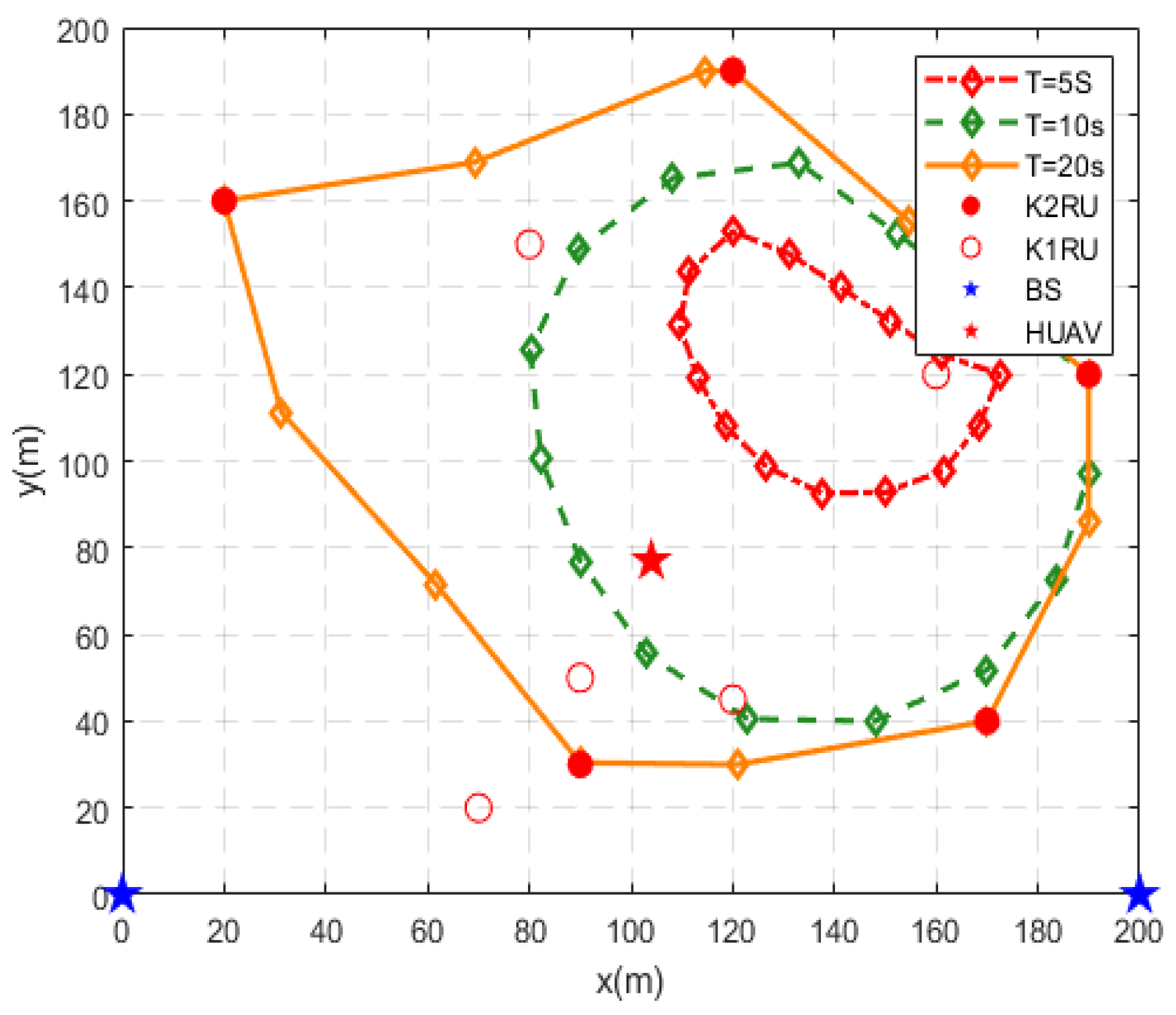
- Trajectory optimization sub-problem
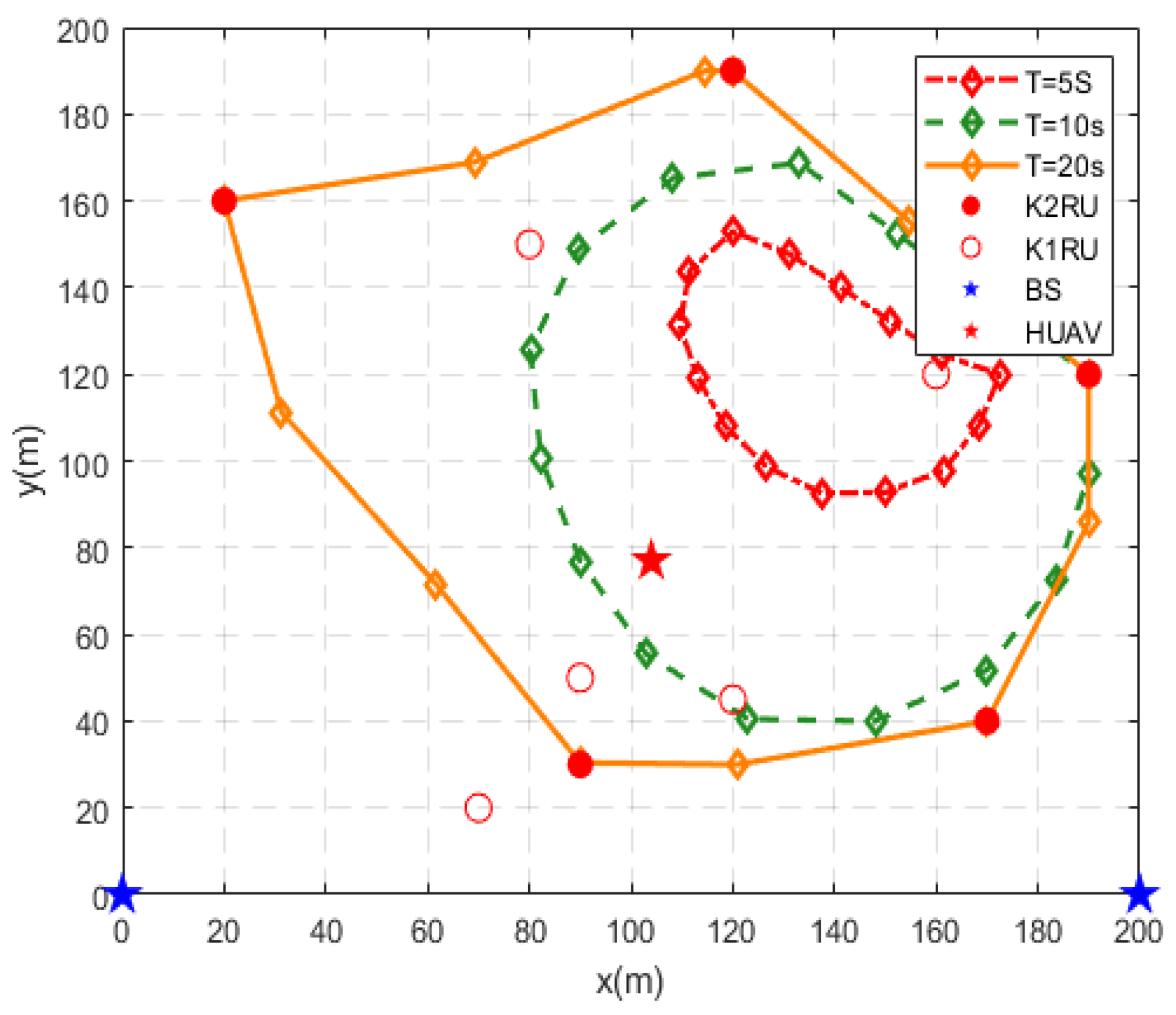
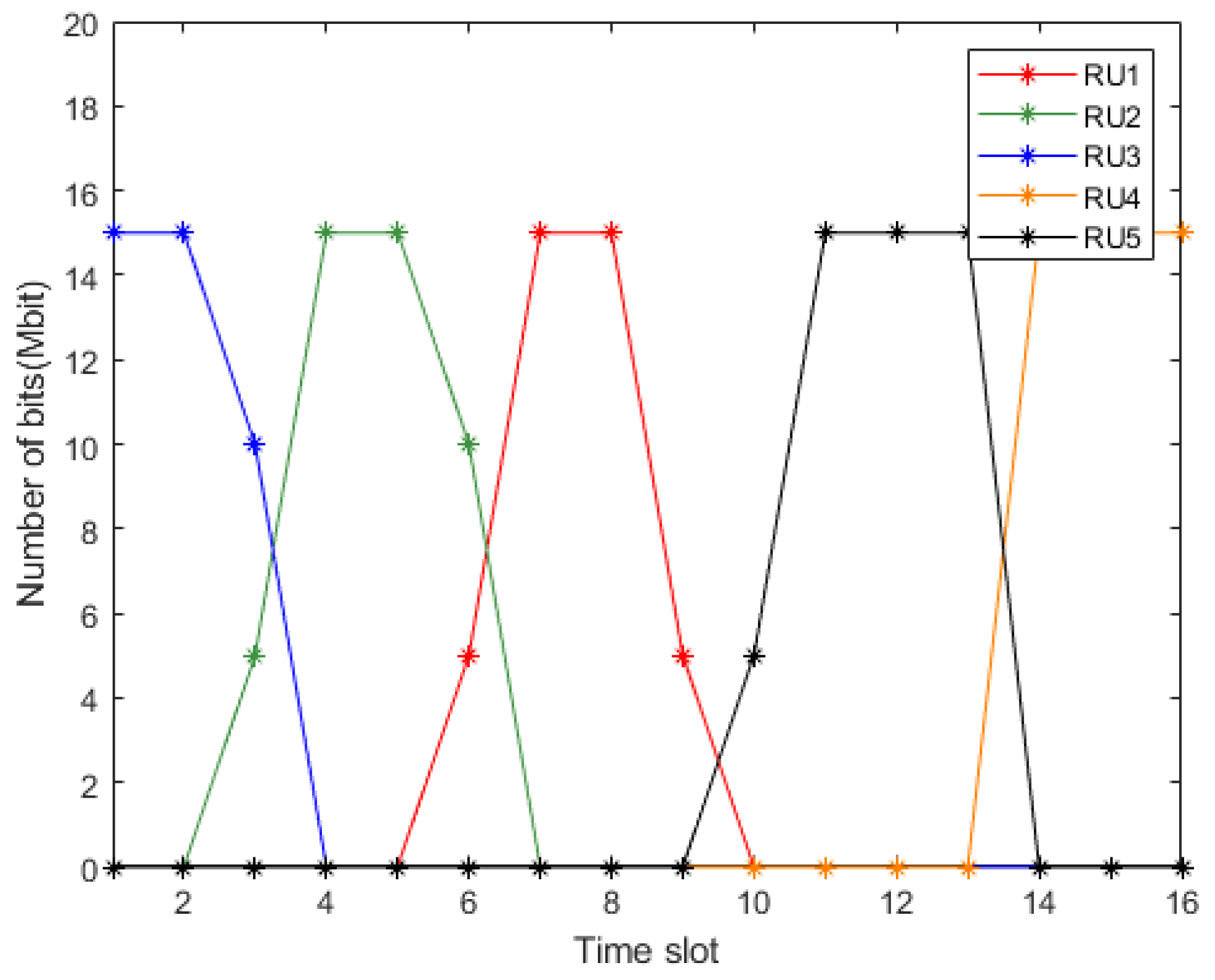
6. Simulation Results and Discussions
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Li, H.; Shou, G.; Hu, Y.; Guo, Z. Mobile Edge Computing: Progress and Challenges. In Proceedings of the 2016 4th IEEE International Conference on Mobile Cloud Computing, Services, and Engineering (MobileCloud), Oxford, UK, 29 March–1 April 2016; pp. 83–84. [Google Scholar]
- Abbas, N.; Zhang, Y.; Taherkordi, A.; Skeie, T. Mobile Edge Computing: A Survey. IEEE Internet Things J. 2018, 5, 450–465. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Zhang, C.; Xu, C.; Xiong, F.; Zhang, Y.; Umer, T. Energy-Efficient Industrial Internet of UAVs for Power Line Inspection in Smart Grid. IEEE Trans. Ind. Inform. 2018, 14, 2705–2714. [Google Scholar] [CrossRef] [Green Version]
- Han, R.; Wen, Y.; Bai, L.; Liu, J.; Choi, J. Rate Splitting on Mobile Edge Computing for UAV-Aided IoT Systems. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 1193–1203. [Google Scholar] [CrossRef]
- Yu, Z.; Gong, Y.; Gong, S.; Guo, Y. Joint Task Offloading and Resource Allocation in UAV-Enabled Mobile Edge Computing. IEEE Internet Things J. 2020, 7, 3147–3159. [Google Scholar] [CrossRef]
- Yang, L.; Yao, H.; Wang, J.; Jiang, C.; Benslimane, A.; Liu, Y. Multi-UAV-Enabled Load-Balance Mobile-Edge Computing for IoT Networks. IEEE Internet Things J. 2020, 7, 6898–6908. [Google Scholar] [CrossRef]
- Wang, J.; Liu, K.; Pan, J. Online UAV-Mounted Edge Server Dispatching for Mobile-to-Mobile Edge Computing. IEEE Internet Things J. 2020, 7, 1375–1386. [Google Scholar] [CrossRef]
- Liu, Y.; Xiong, K.; Ni, Q.; Fan, P.; Ben Letaief, K. UAV-Assisted Wireless Powered Cooperative Mobile Edge Computing: Joint Offloading, CPU Control, and Trajectory Optimization. IEEE Internet Things J. 2020, 7, 2777–2790. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, Y.; Hu, R.Q.; Qian, Y. Computation Rate Maximization in UAV-Enabled Wireless-Powered Mobile-Edge Computing Systems. IEEE J. Sel. Areas Commun. 2018, 36, 1927–1941. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Li, X.; Luo, C.; Ji, H.; Zhang, H. Energy-Efficient Power, Position and Time Control in UAV-Assisted Wireless Networks. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Number of RUs | |
| The size of input data on RU | |
| The number of CPU cycles required to compute 1 bit on RU | |
| The maximum tolerated delay of RU | |
| Priority value of RU | |
| Number of BSs | |
| Access mode parameter | |
| The transmission power of RU | |
| Number of time slots | |
| The noise power | |
| The channel power gain | |
| Coordinate parameters | |
| The altitude of UAV | |
| The flight period of UAV | |
| The duration of a time slot | |
| The maximum flight speed of UAV | |
| Wireless channel gain | |
| The position of UAV at time slot | |
| The transmission rate | |
| Energy consumption |
| Parameters | Value |
|---|---|
| Number of ground RUs | 10 |
| Number of BSs | 2 |
| Number of UAVs | 2 |
| RU’s status input data size range | from 30 to 50 Mbits |
| RU’s required CPU cycles per bit range | from 100 to 300 cycles/bit [9] |
| RU’s priority range | from 1 to 10 |
| RU’s transmission power | 30 dbm |
| Number of time slots | 16 [9] |
| The noise power | −100 dB [10] |
| The channel power gain at a reference distance of d0 = 1 m | −50 dB [9] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Zhang, X.; Xiao, H.; Li, Z.; Zhang, H. Double-Layer Mobile Edge Computing-Enabled Power Line Inspection in Smart Grid Networks. Information 2022, 13, 167. https://doi.org/10.3390/info13040167
Liu S, Zhang X, Xiao H, Li Z, Zhang H. Double-Layer Mobile Edge Computing-Enabled Power Line Inspection in Smart Grid Networks. Information. 2022; 13(4):167. https://doi.org/10.3390/info13040167
Chicago/Turabian StyleLiu, Shimin, Xinhe Zhang, Hailong Xiao, Ziqi Li, and Heli Zhang. 2022. "Double-Layer Mobile Edge Computing-Enabled Power Line Inspection in Smart Grid Networks" Information 13, no. 4: 167. https://doi.org/10.3390/info13040167
APA StyleLiu, S., Zhang, X., Xiao, H., Li, Z., & Zhang, H. (2022). Double-Layer Mobile Edge Computing-Enabled Power Line Inspection in Smart Grid Networks. Information, 13(4), 167. https://doi.org/10.3390/info13040167