
Contour Extraction Based on Adaptive Thresholding in Sonar Images


Abstract
:1. Introduction
1.1. Sonar Mapping Systems
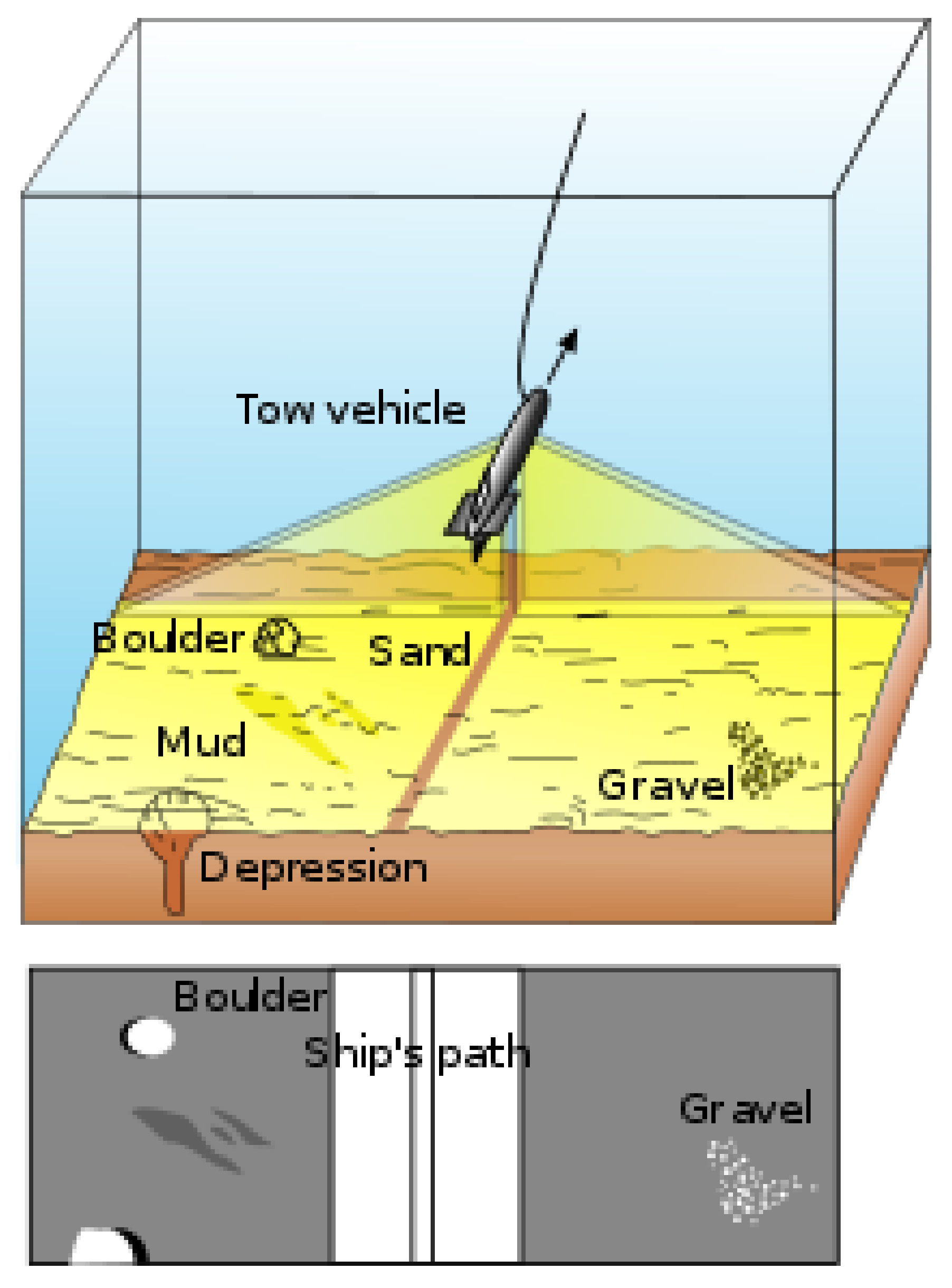
1.2. How Side-Scan Sonars Work
1.3. Frequencies Used
1.4. Side-Scan Sonar Applications
1.5. Objective and Paper Organization
2. Literature Review and Reseach Problems
2.1. Related Work
2.2. Problems in Side-Scan Sonar Research
2.2.1. Sound Problems
- 1.
- Signal degeneration in the ocean is due to:
- (a)
- refraction of sound;
- (b)
- attenuation of sound;
- (c)
- reflection from surface and bottom and Lloyd mirror effect;
- (d)
- signal fluctuation.
- 2.
- Scattering of sound in the ocean is due to [29]:
- (a)
- dependence on the properties of the sound source;
- (b)
- dependence on time;
- (c)
- distribution of the scatterers in the ocean;
- (d)
- frequency and coherence characteristics of the scattered sound.
Especially the single transmitter/single receiver systems face two common problems:- (a)
- the system response is range variant;
- (b)
- the range curvature effect also called range migration [10].
- 3.
- 4.
- The interference of the returned echoes, due to multiple reflections, each with different received frequency and power, fades and distorts the signal.
2.2.2. Illumination Problems
2.2.3. Other Problems
- 1.
- Camera jitter. In real surveillance applications, the camera itself moves frequently. Hence, the pixel correspondence between the background and the image changes frequently [31] resulting in artifacts appearing as extra noise.
- 2.
- Rapid changes in temperature (thermocline zone) or salinity (halocline zone) or the presence of strong chemical gradients (chemocline zone) reduce the scan range and distort the image. These phenomena take place below the surface zone (typically, at depths of 1000 m or more) [32].
- 3.
- Ocean instabilities like waves, water currents, wind, etc. [10].
3. Contour Extraction Using Conventional Methods
3.1. Using Popular Thresholding Methods
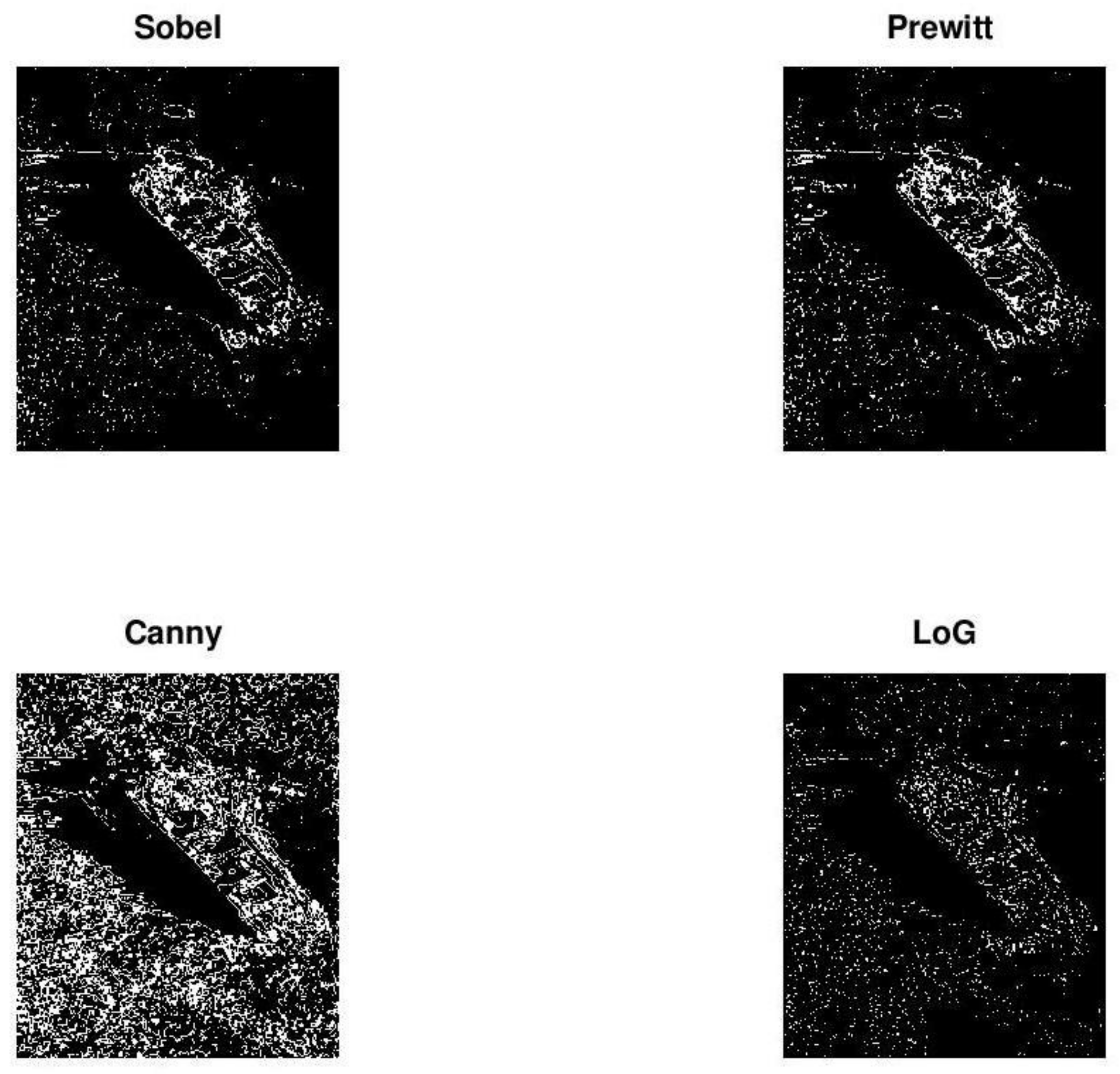
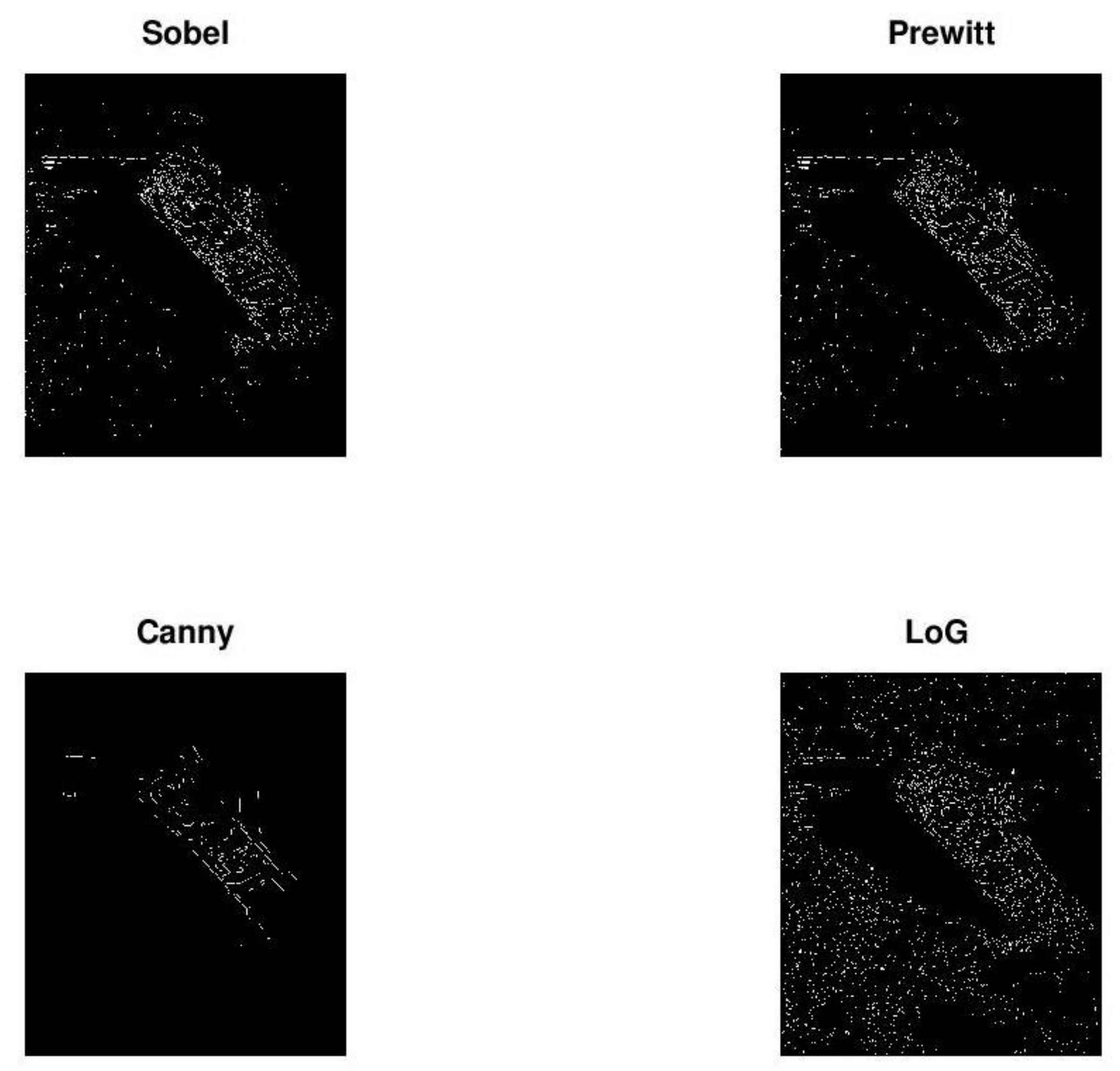
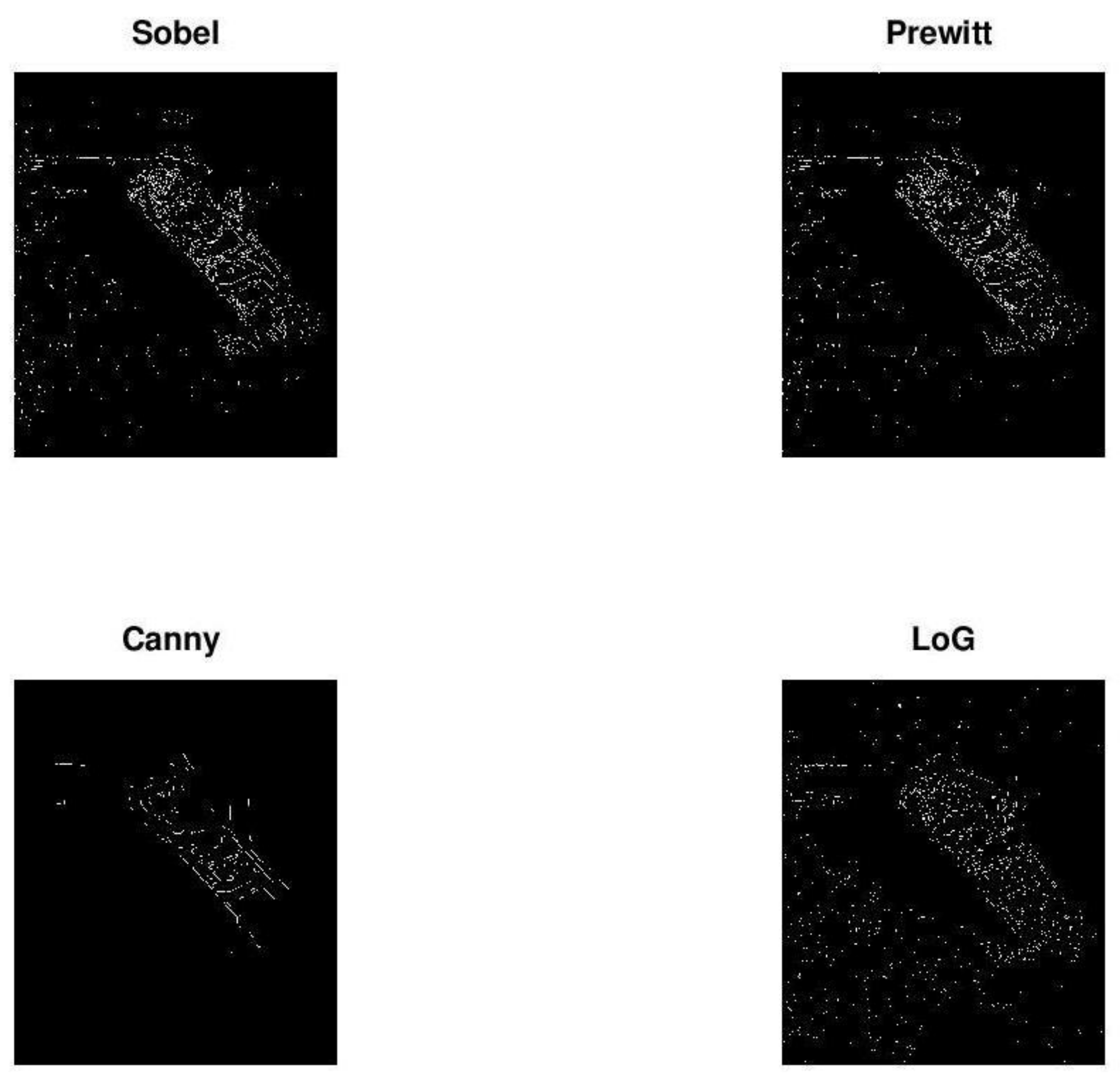
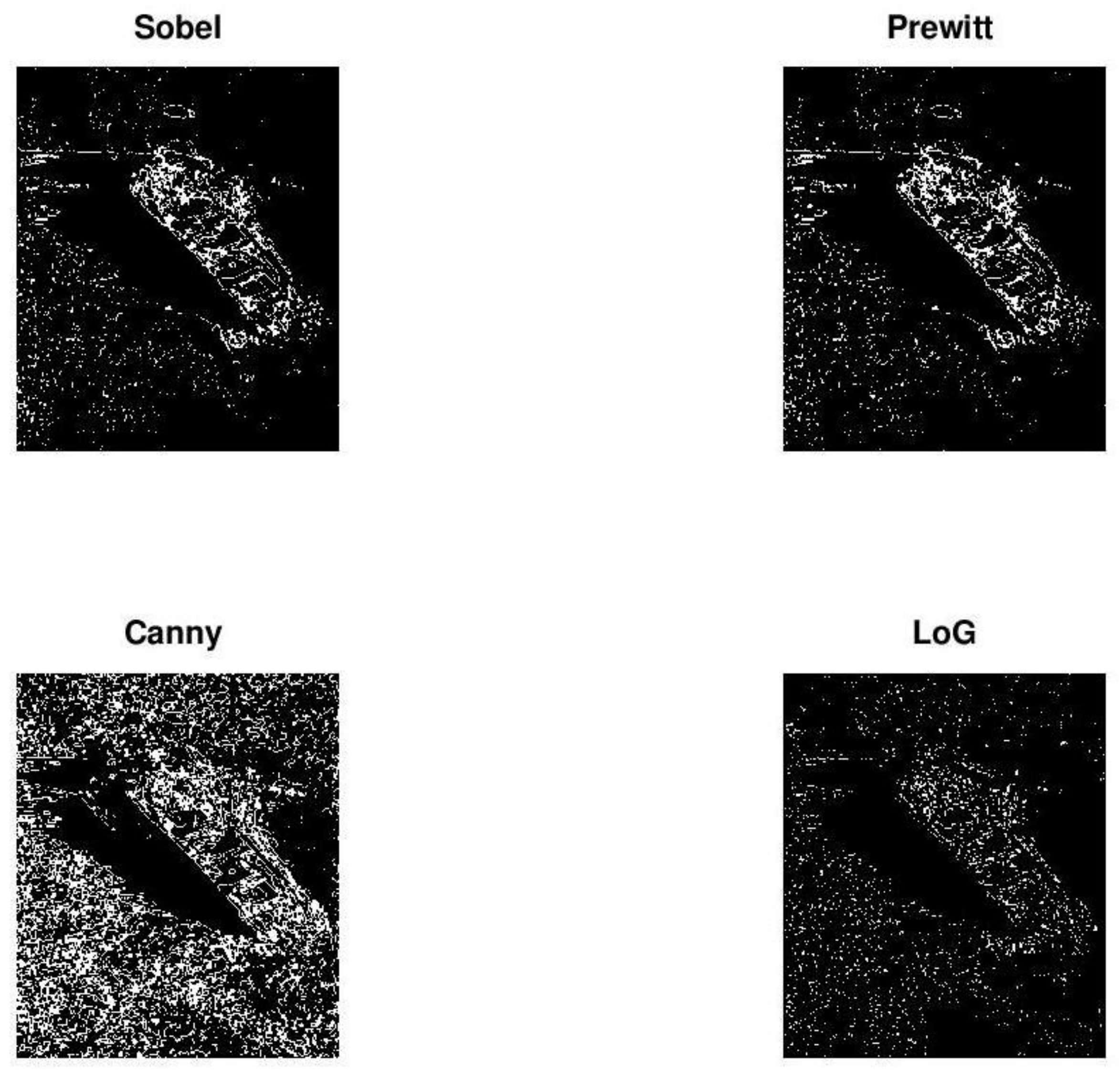
3.2. Using Edge Detection Filters
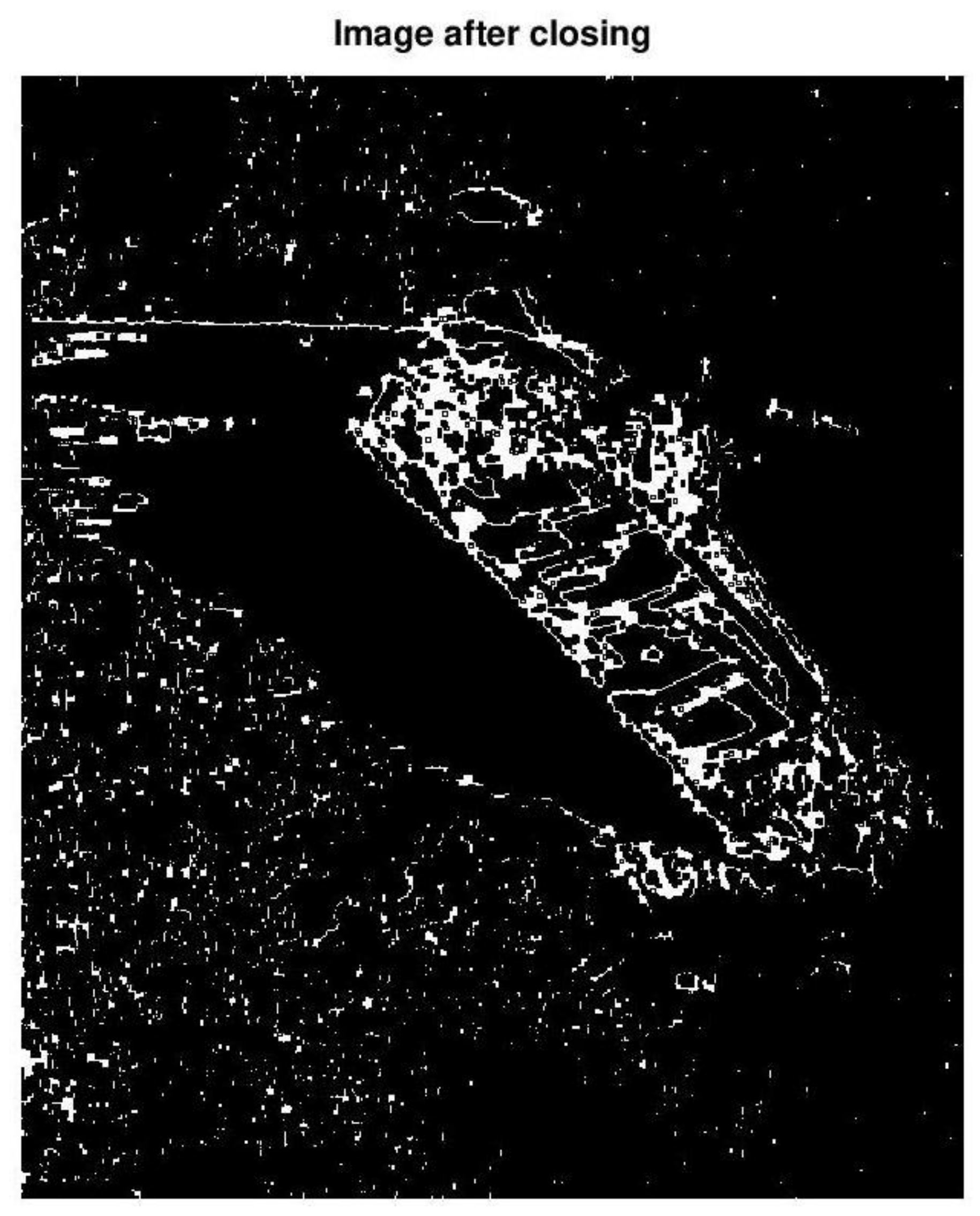
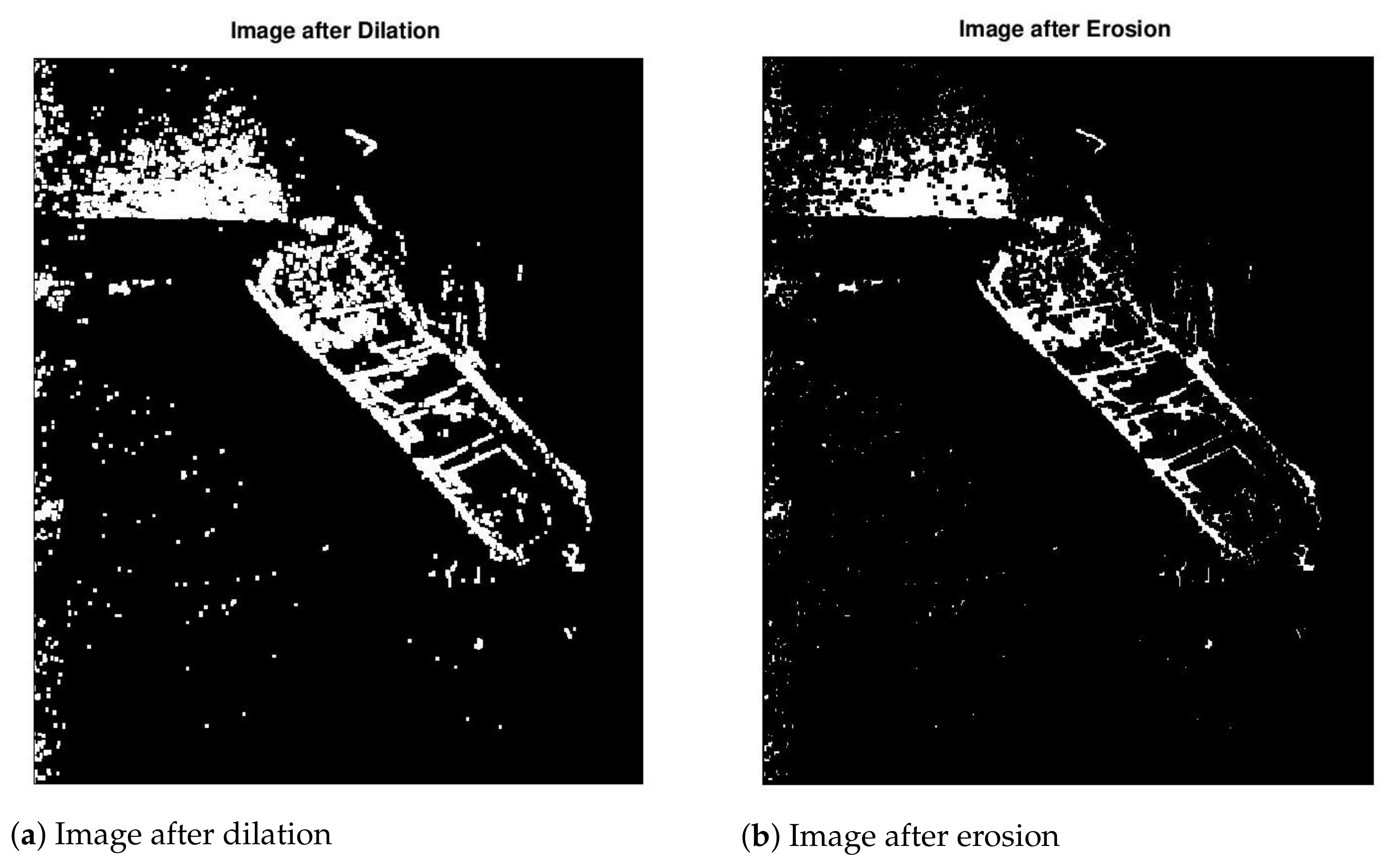
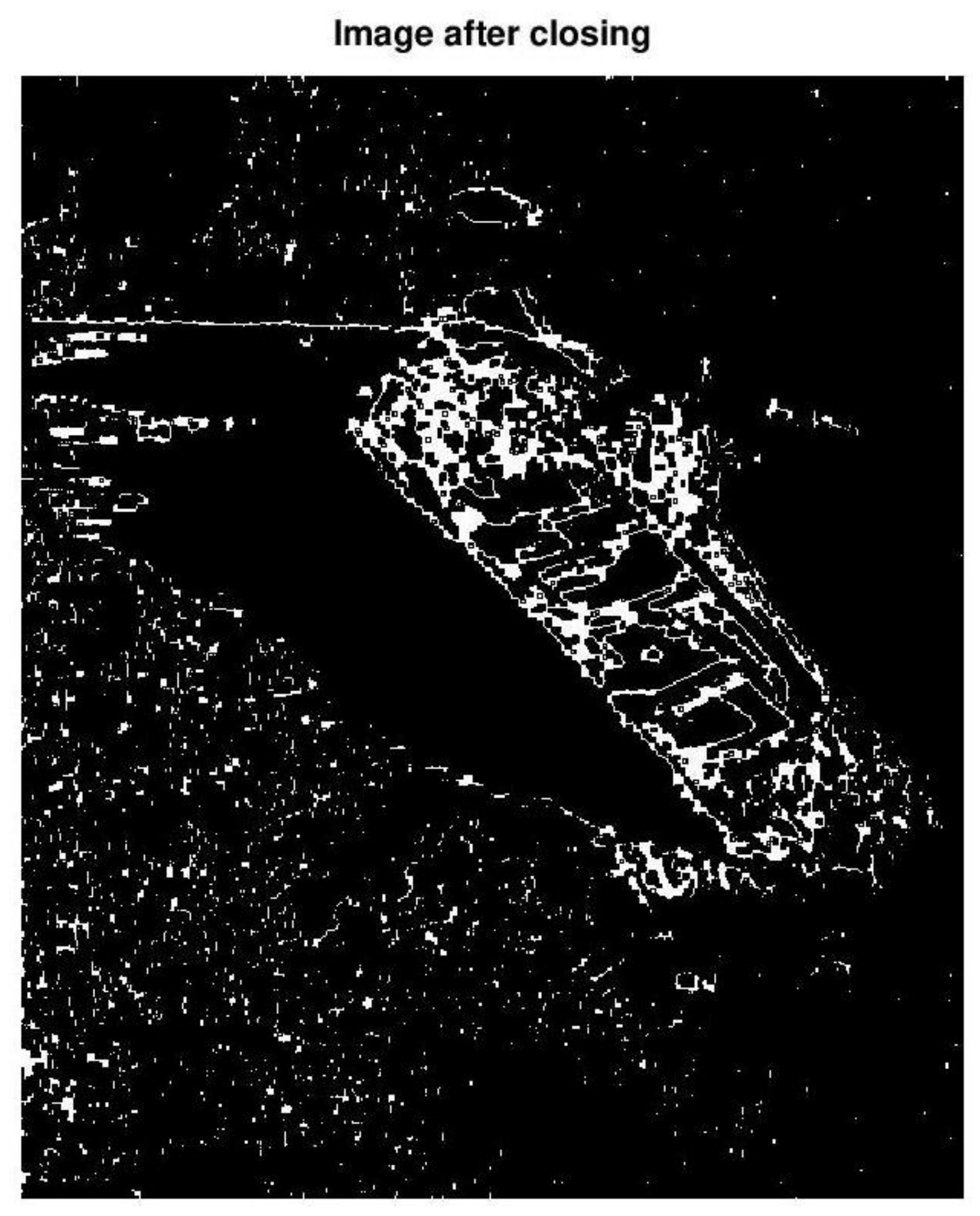
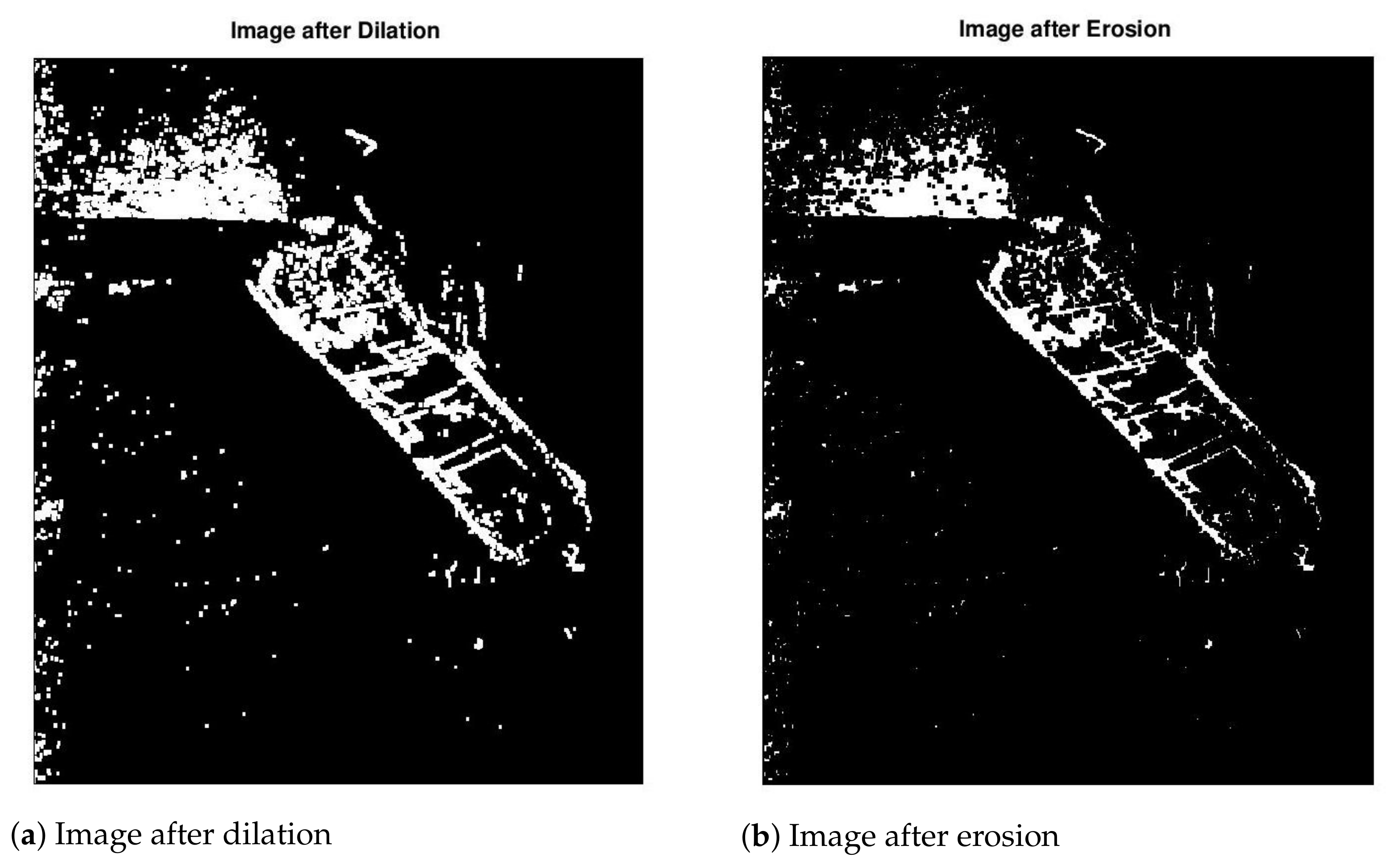
3.3. Using Morphological Transformations
4. Methodology—Proposed Solution
4.1. The Concept
4.2. Locating Peaks and Valleys
- 1.
- The sum of two or more separate non-Gaussian distributions, each with their own mode, may not produce a distribution with distinct modes.
- 2.
- The histogram is very rough (unsmooth), containing many local minima and maxima. To get around this, the histogram should be smoothed before trying to isolate the separate modes.
4.3. The Process
- 1.
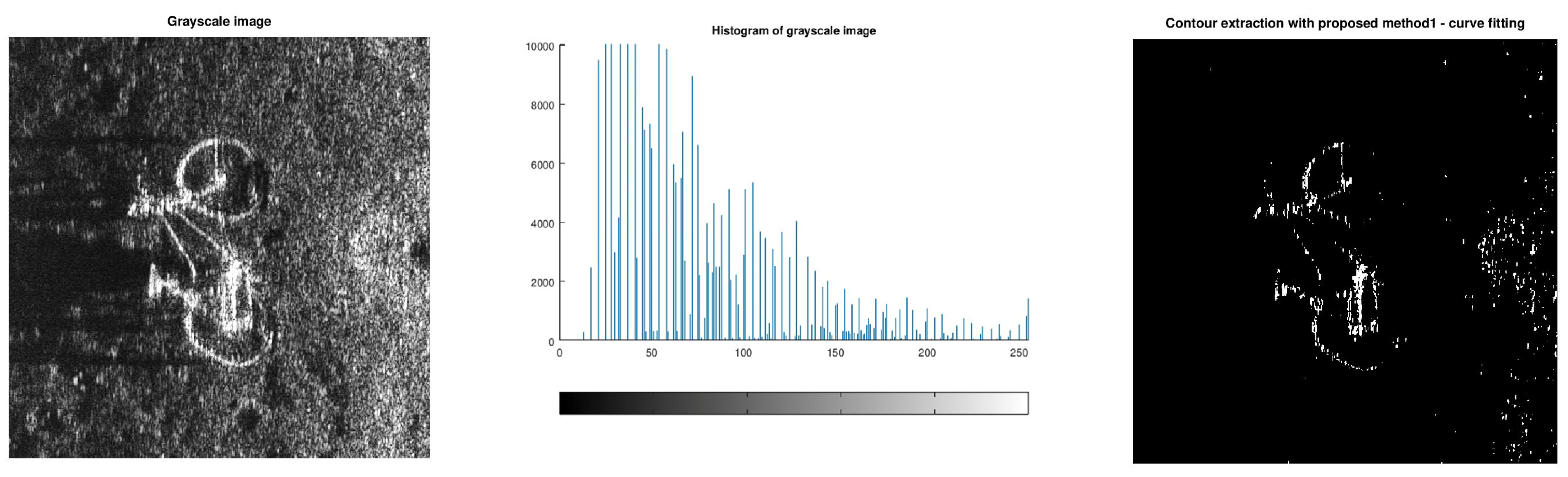
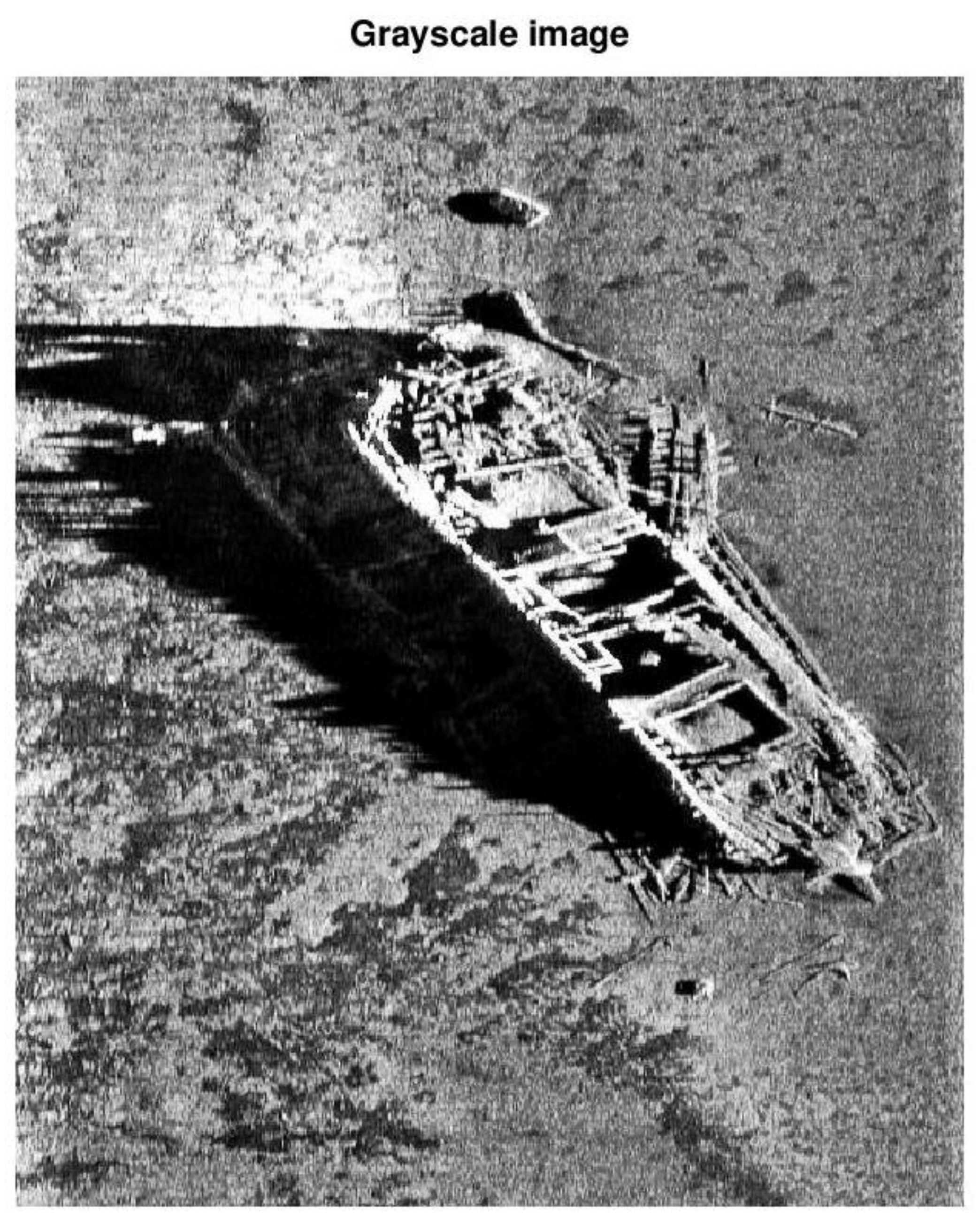
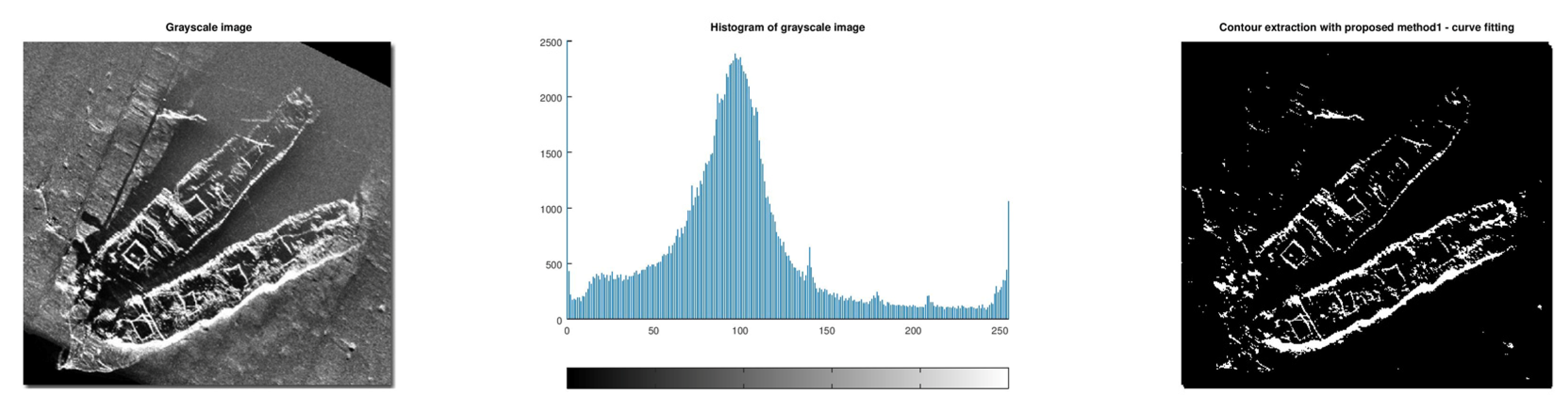
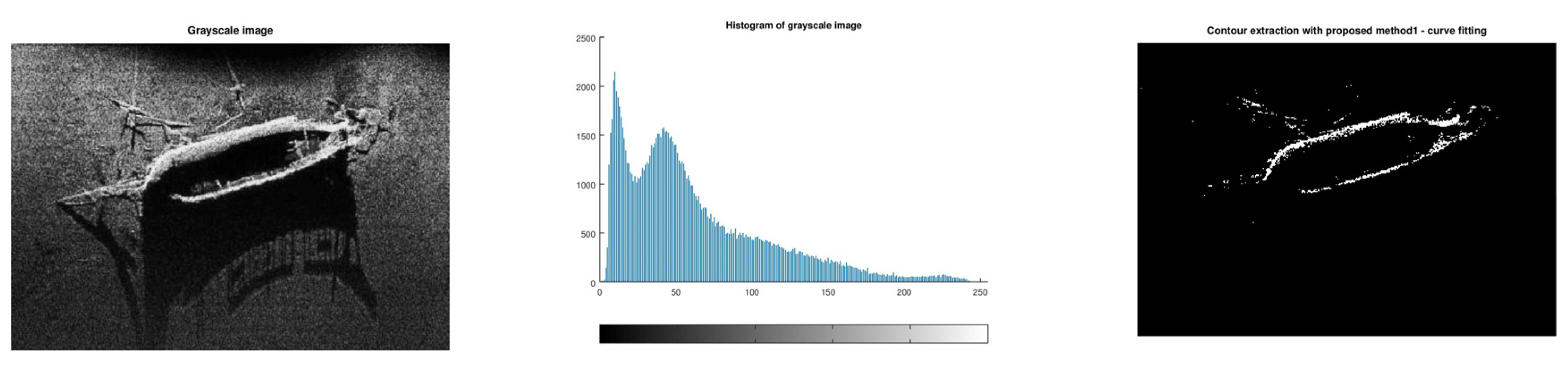
- Input the grayscale SSS image to process.
- 2.
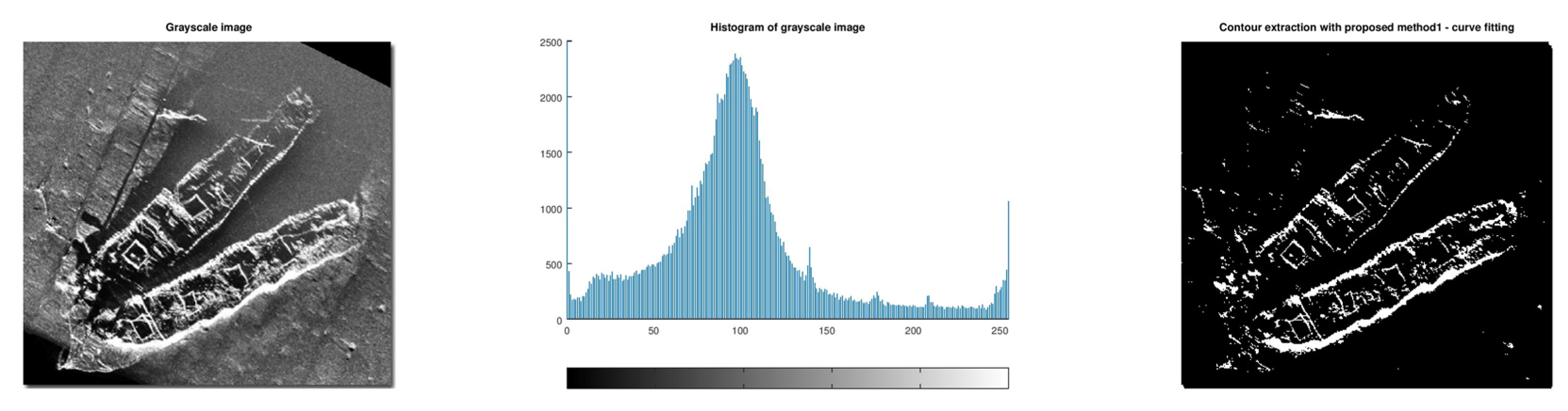
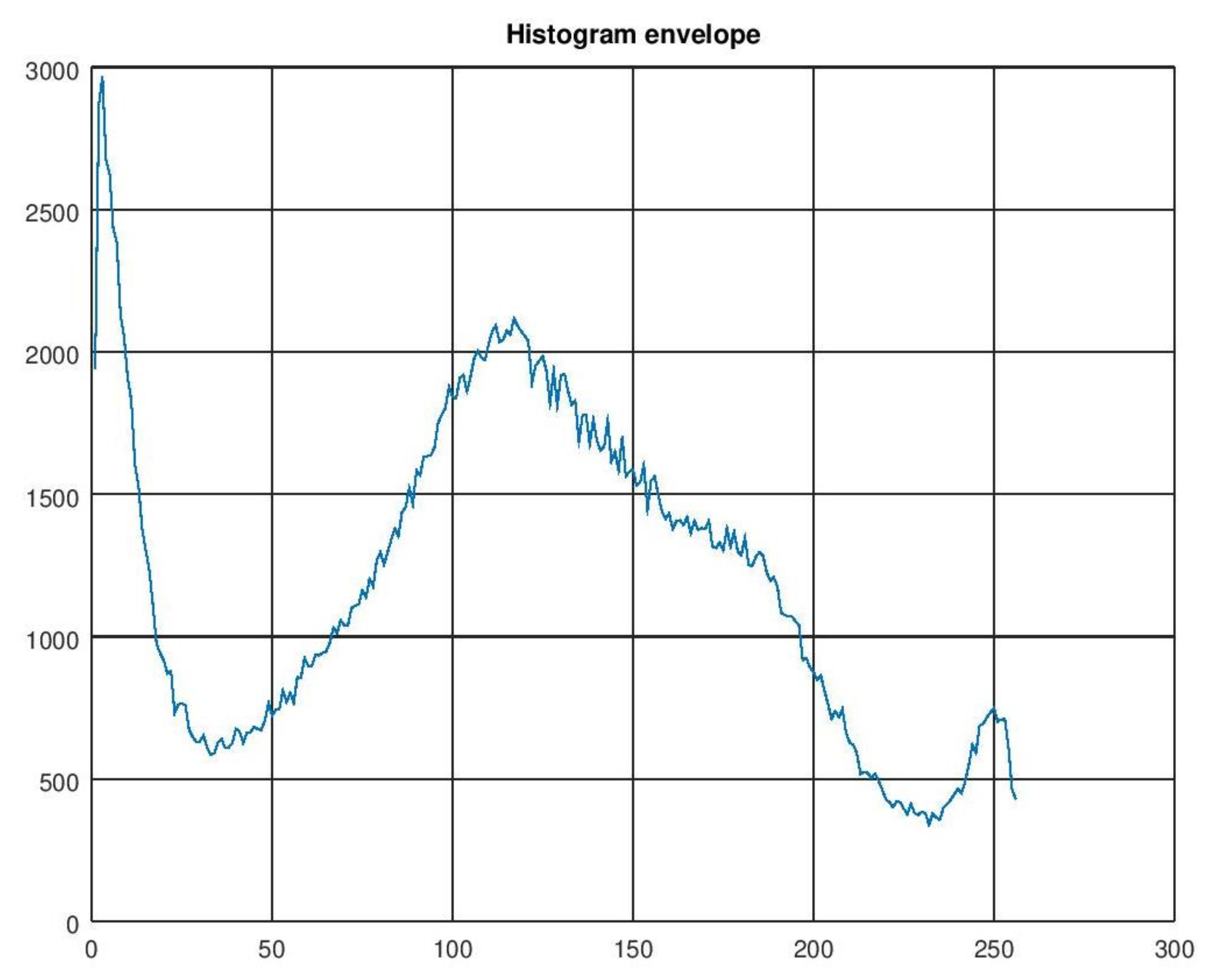
- The histogram of the original grayscale image is computed.
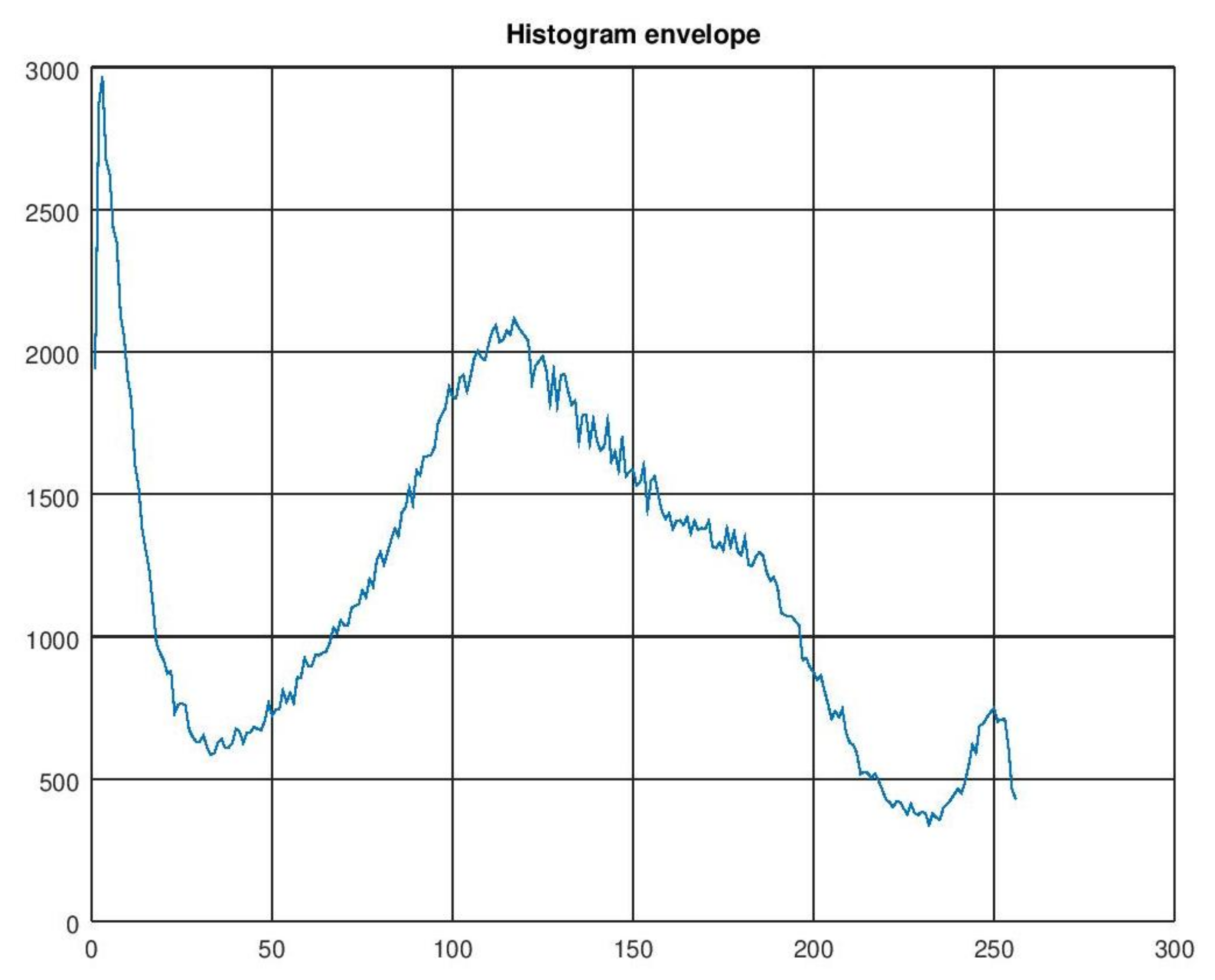
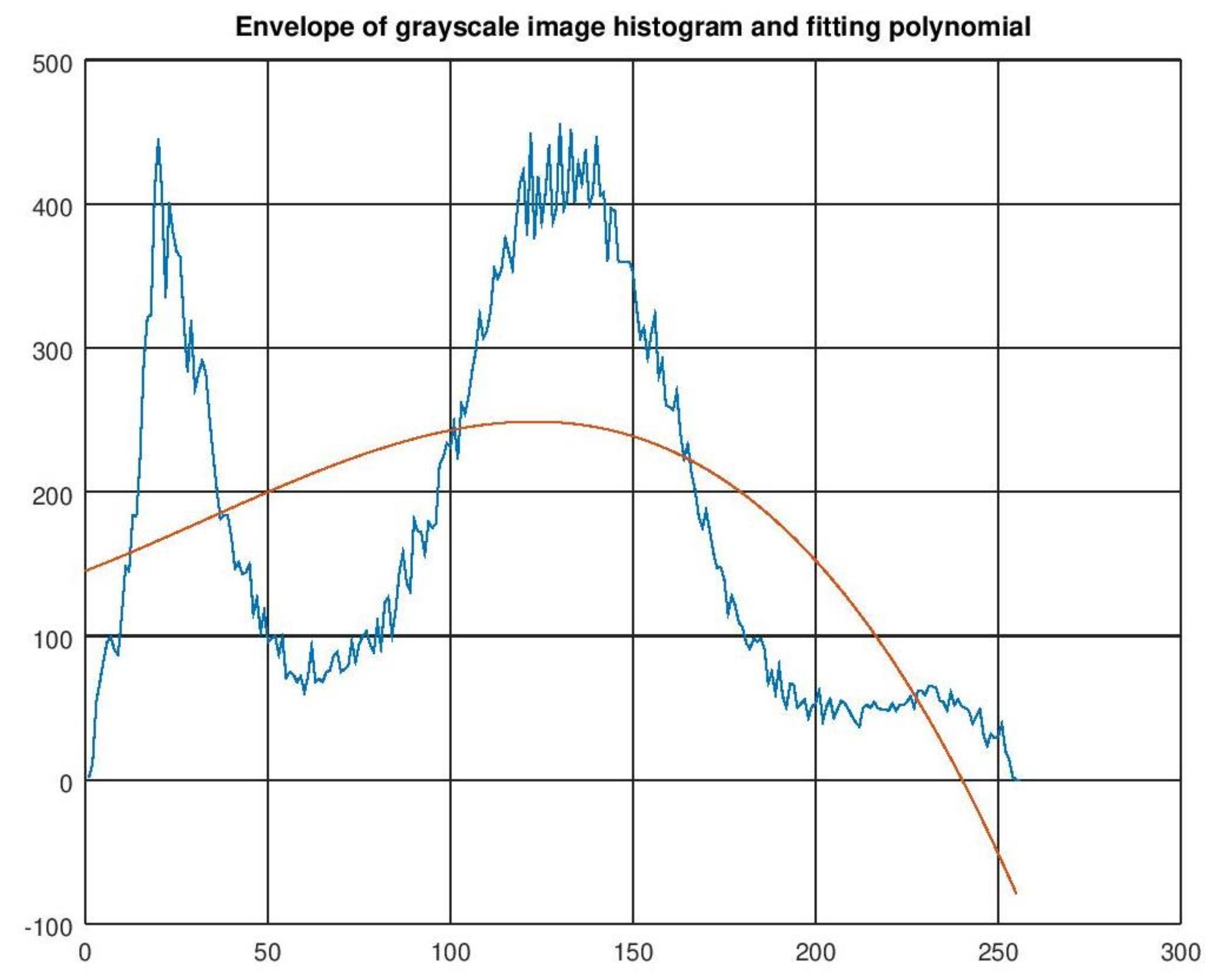
- 3.
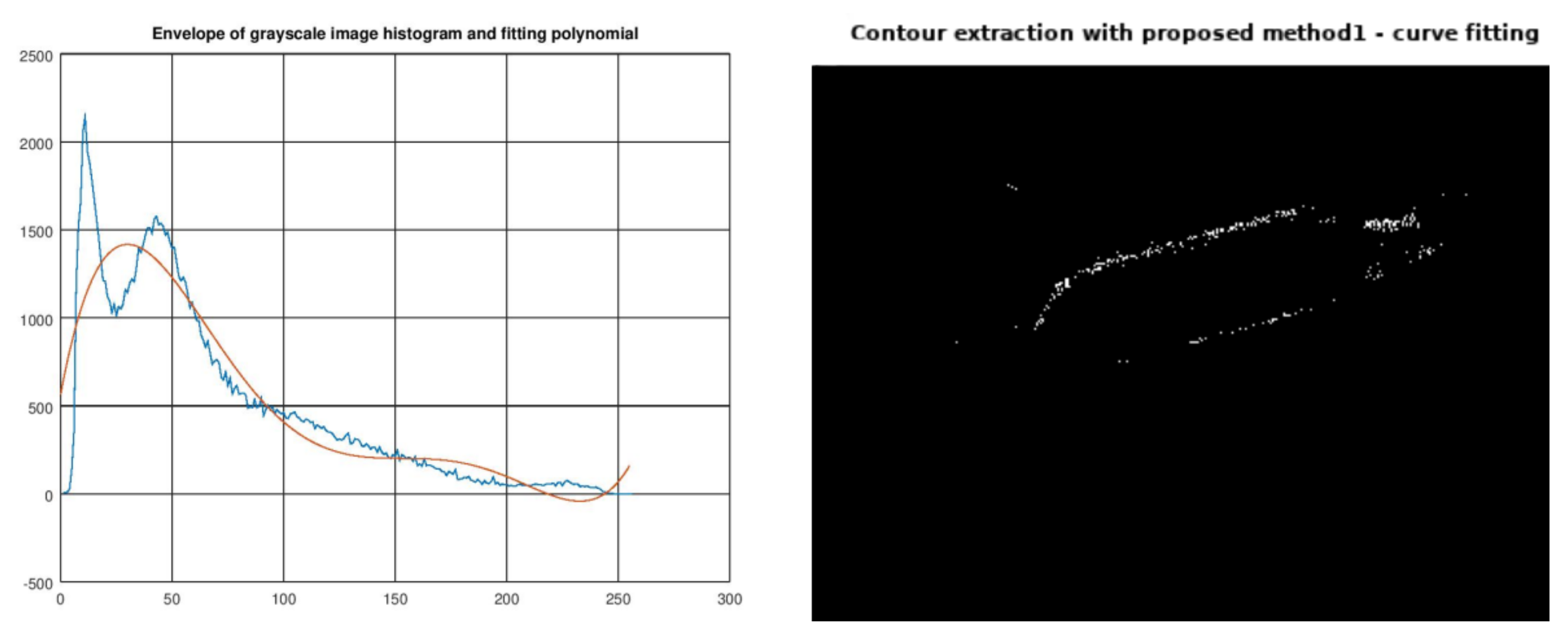
- Calculate the envelope of the histogram.
- 4.
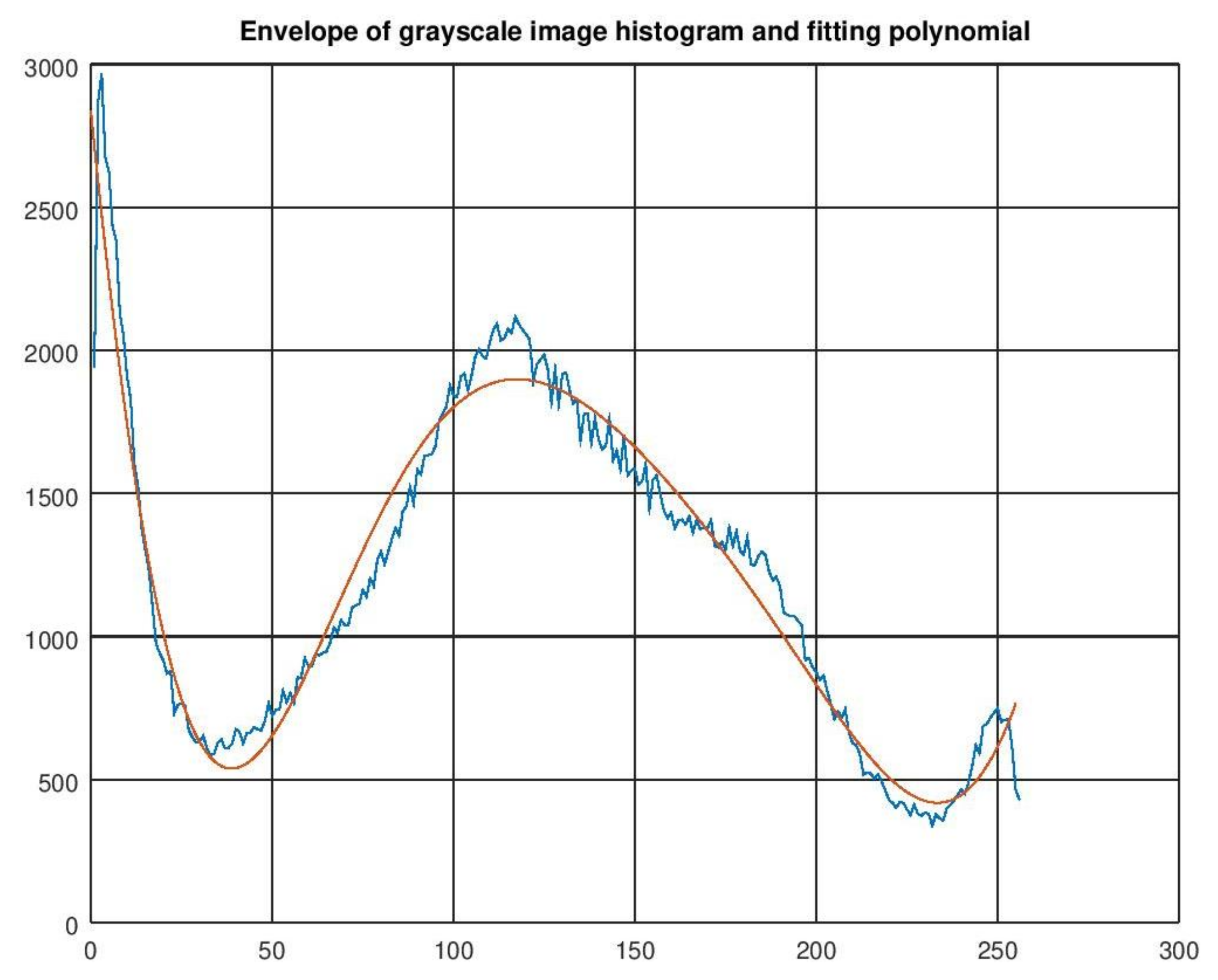
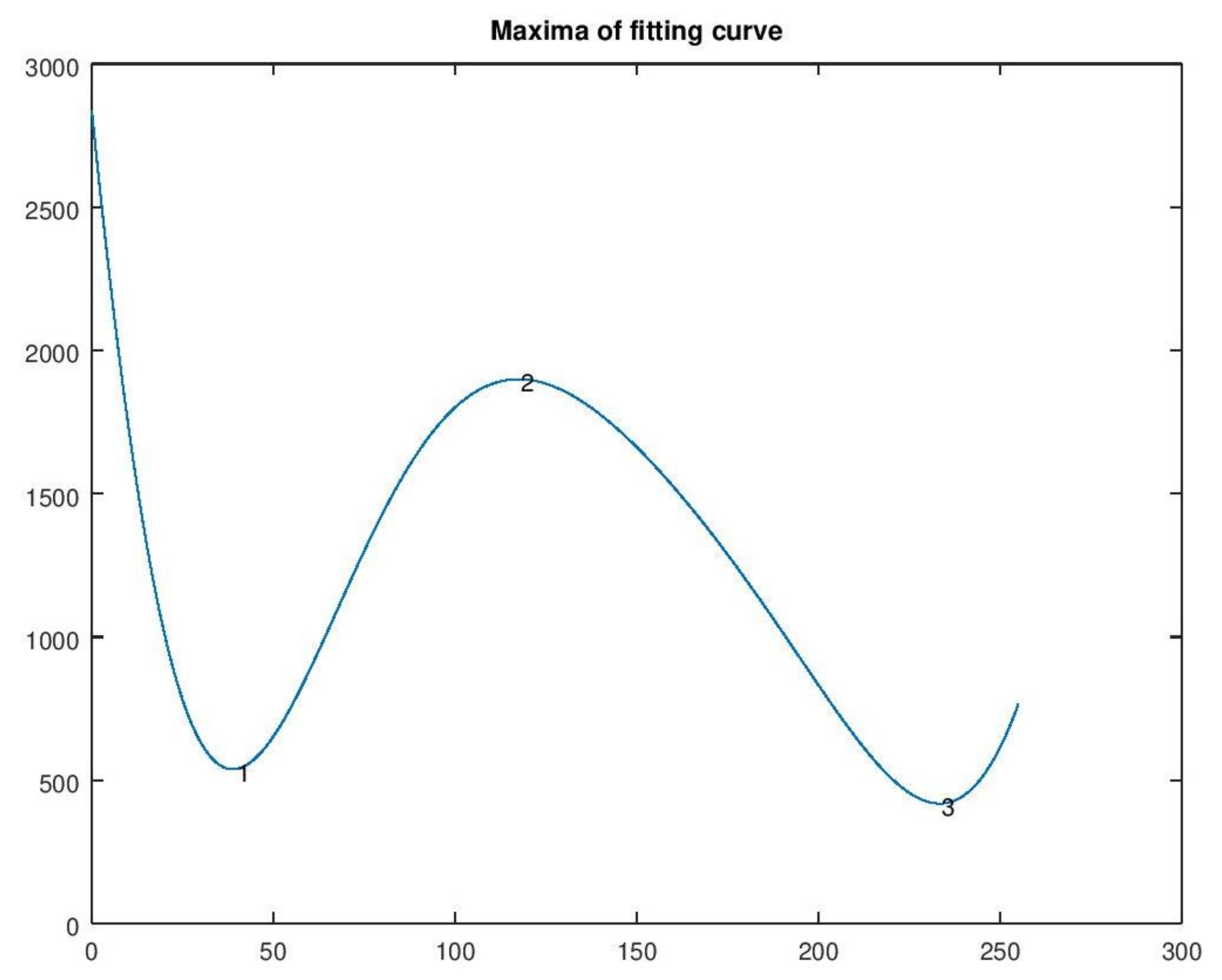
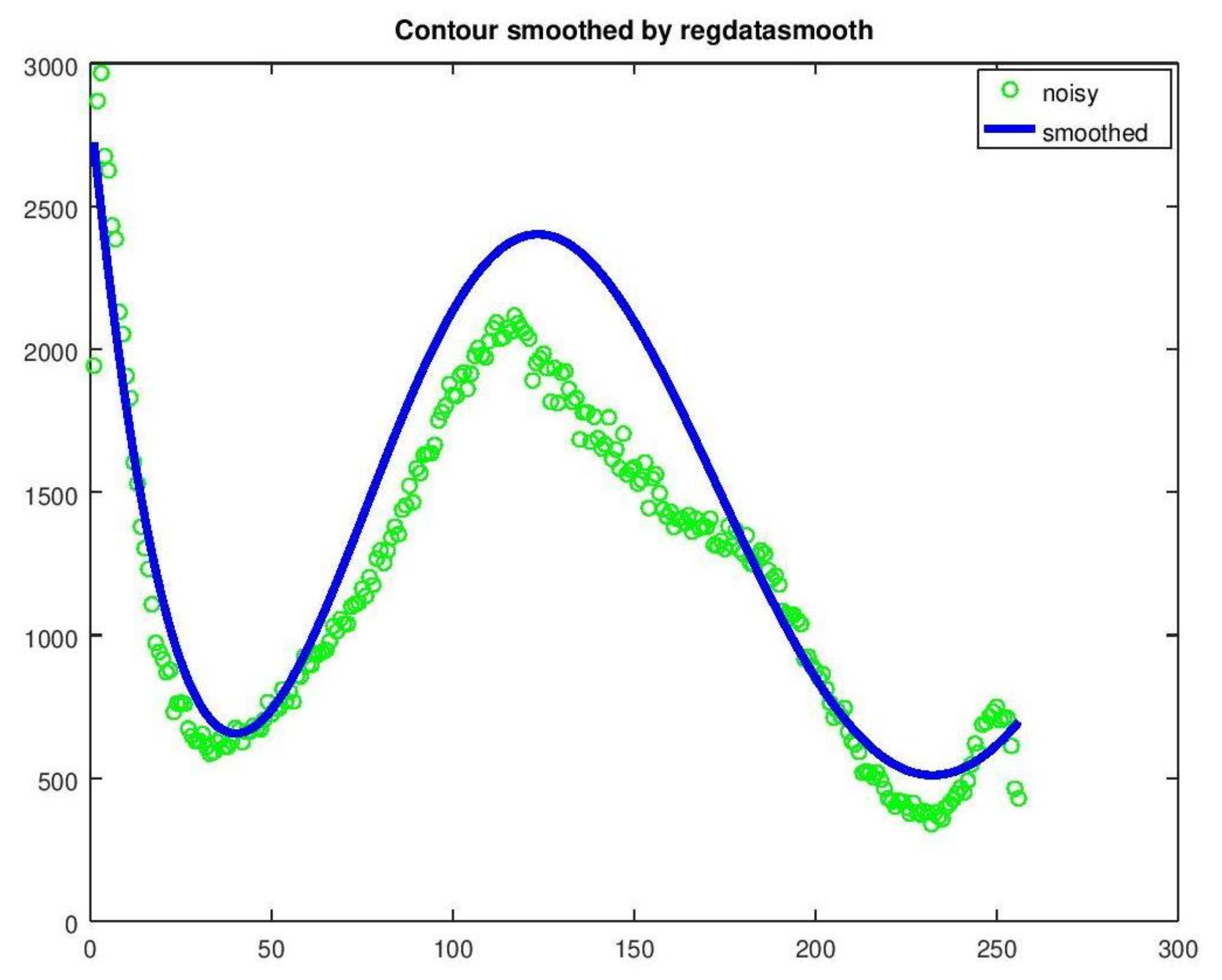
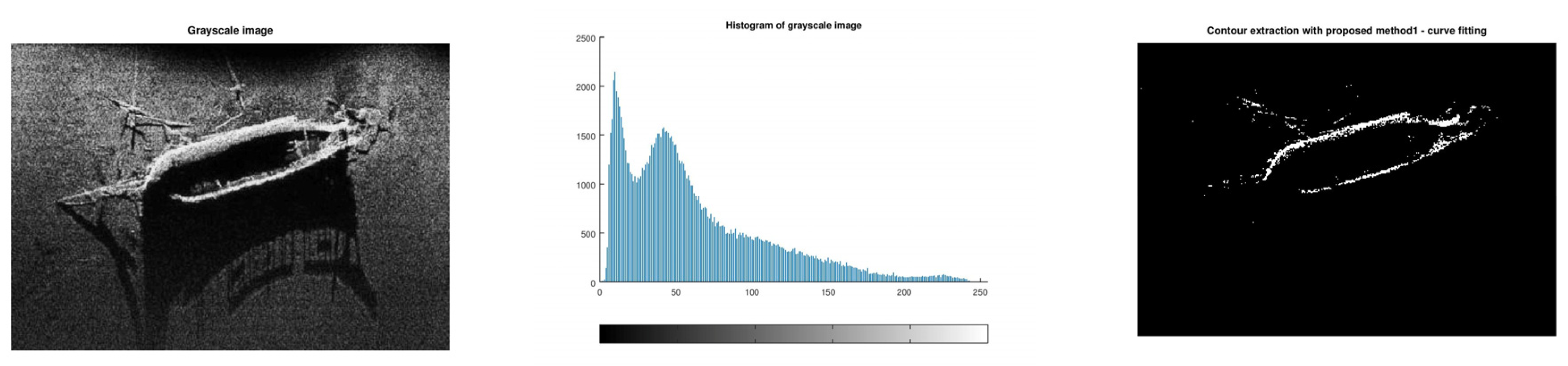
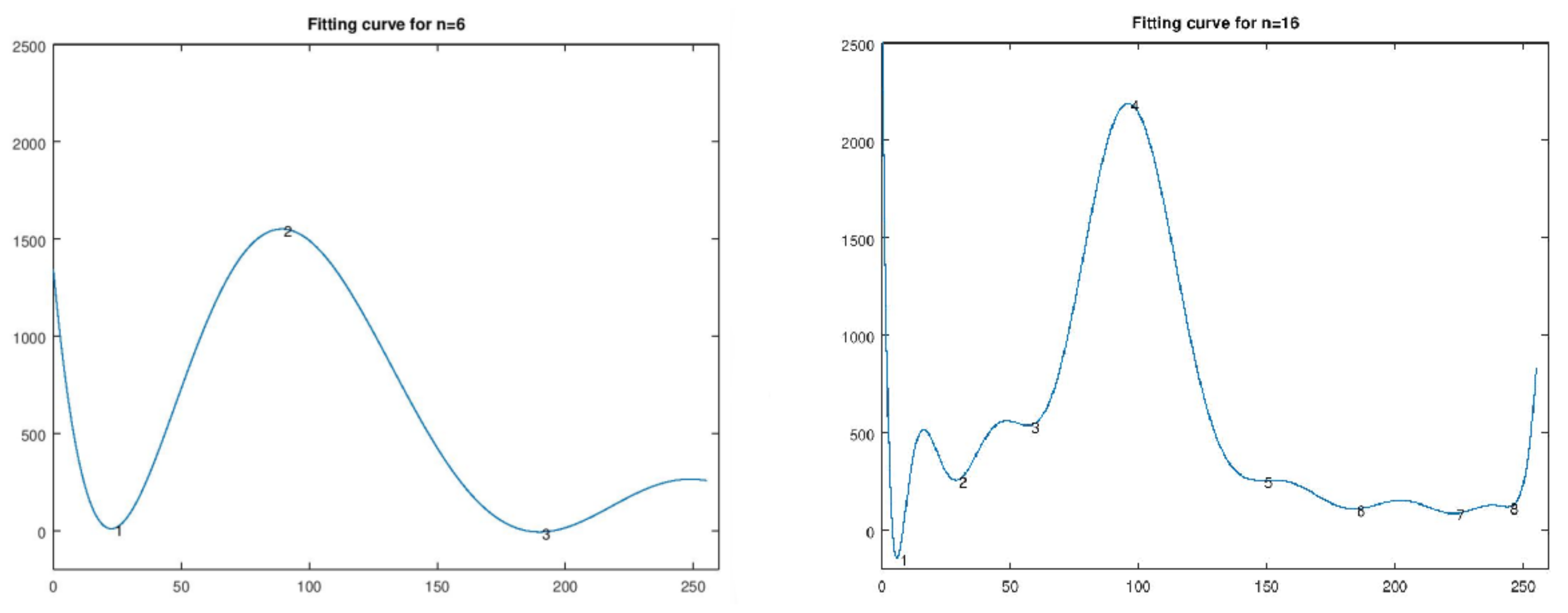
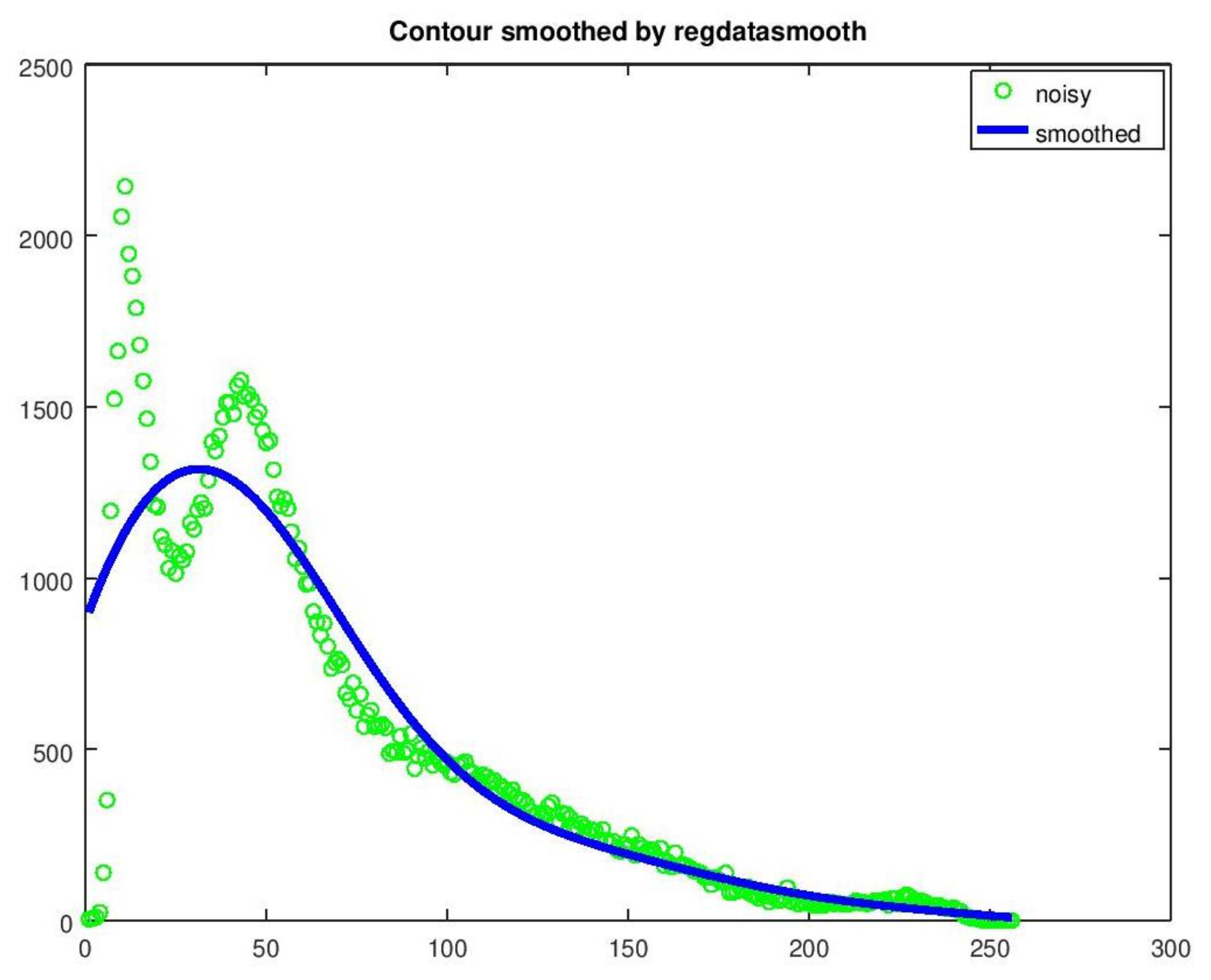
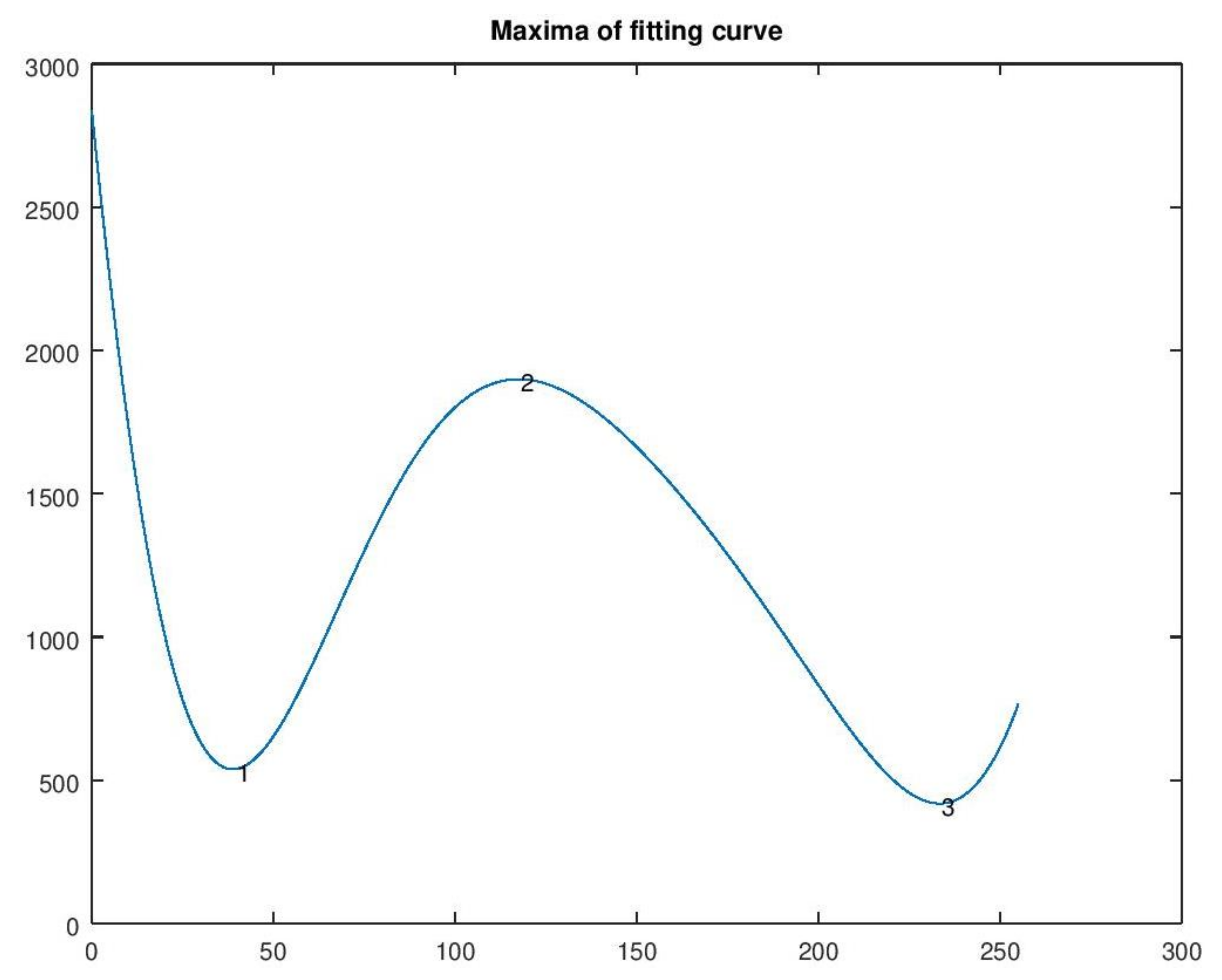
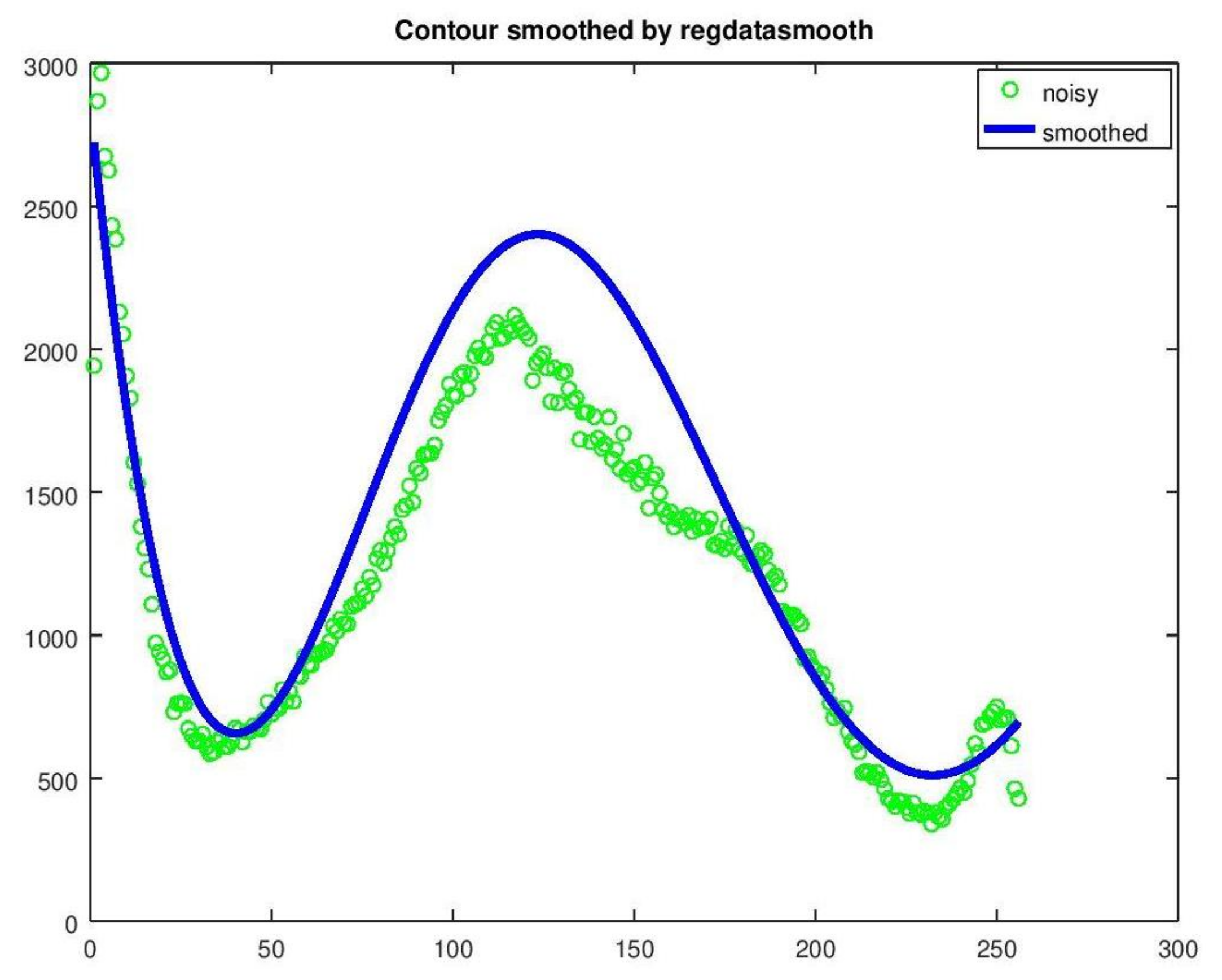
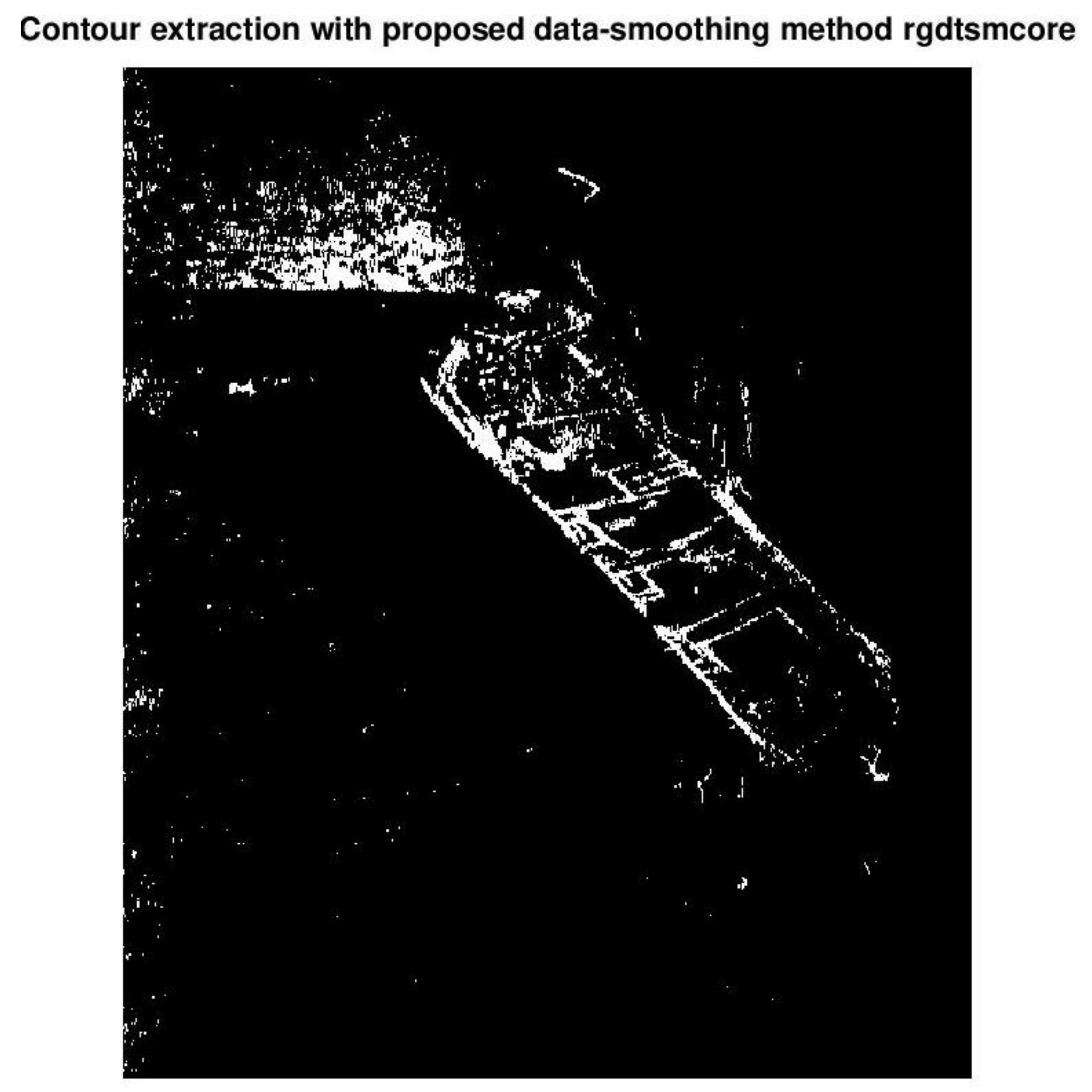
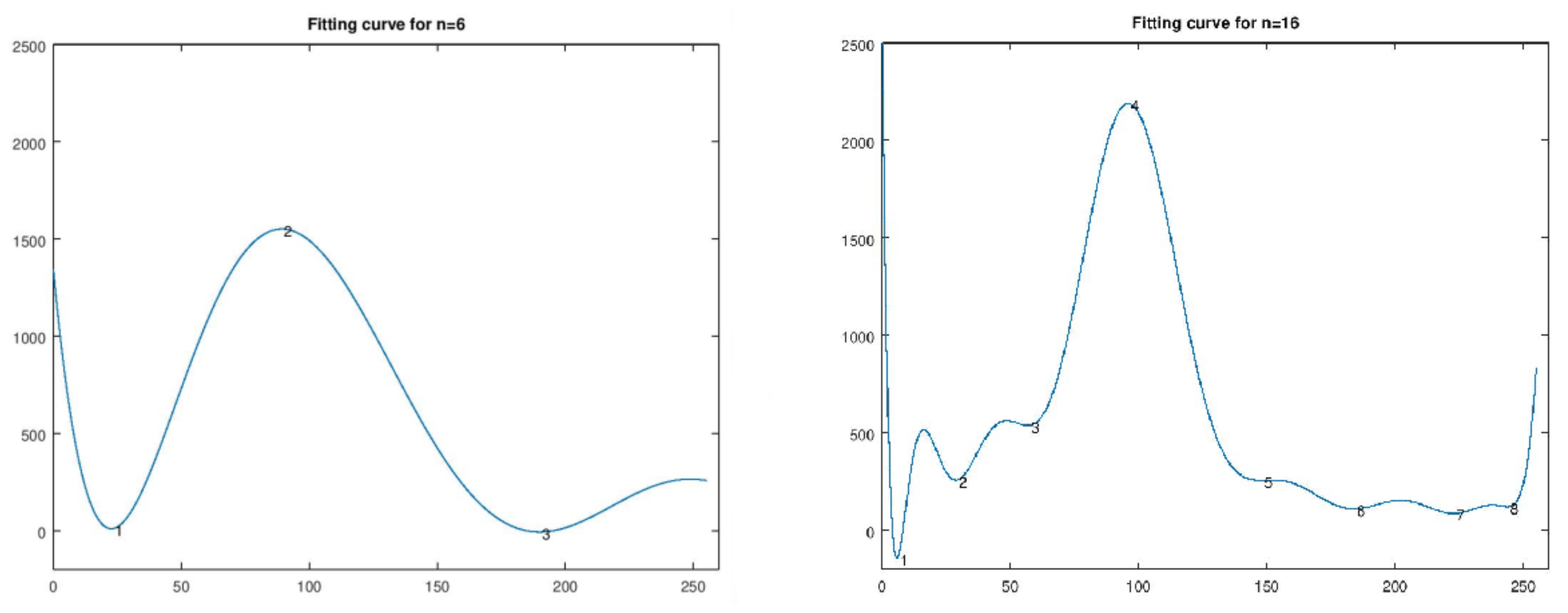
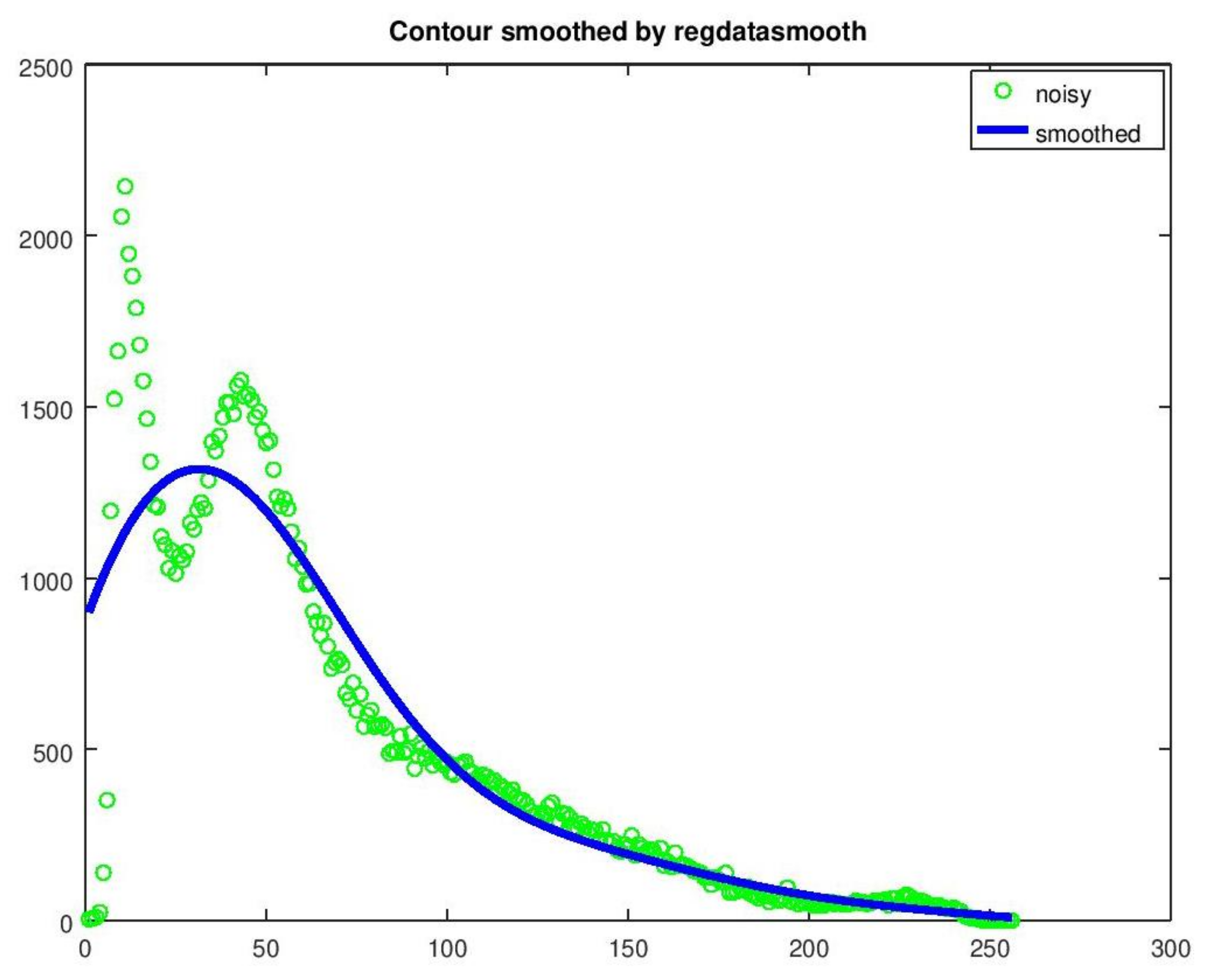
- The envelope of the histogram is approximated by two methods. In method 1 we use polynomial curve fitting. This process resolves noisy histograms resulting in few maxima and minima. In method 2, data smoothing algorithms produce a smooth curve from the envelope of the histogram.
- 5.
- The maxima and minima of the above curves are calculated. The abscissas (x-values) of peaks and valleys are then computed.
- 6.
- The optimal threshold is the valley before the rightmost peak (mode) of the histogram.
- 7.
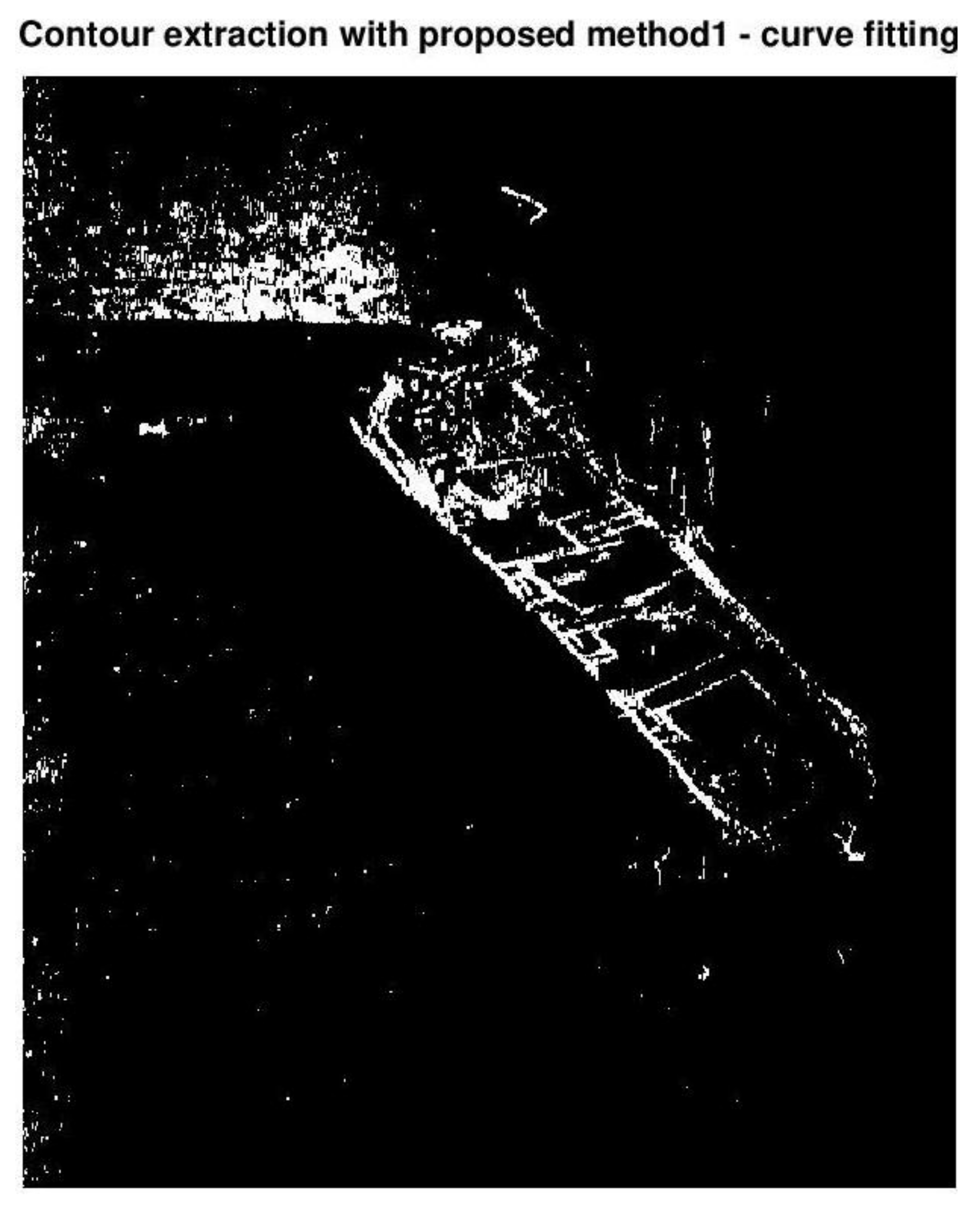
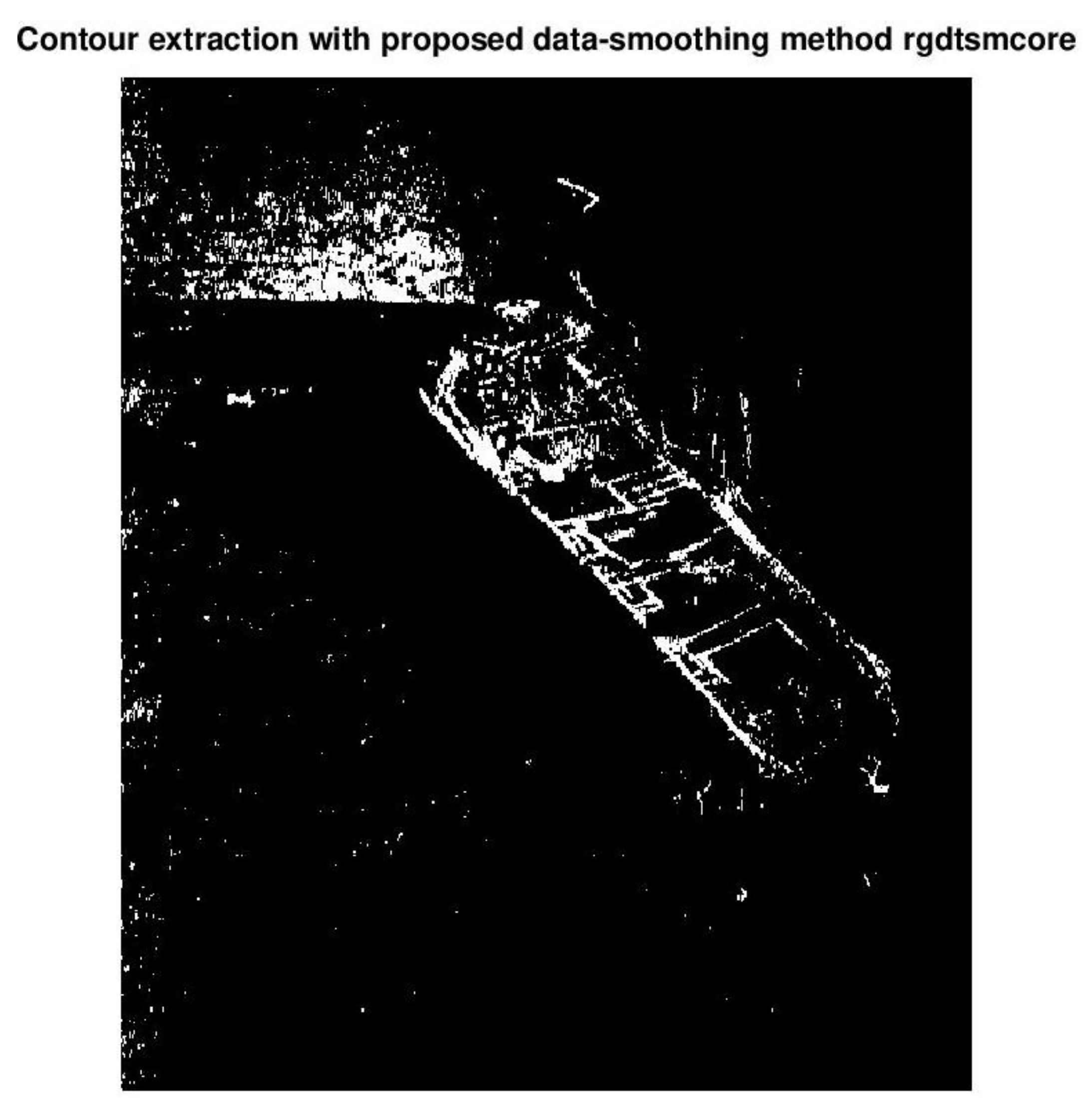
- Convert the grayscale SSS image into a binary image using the optimal threshold. Experimentally, it turns out that the optimal threshold value produces few white pixels (2–5%) which represent the foreground object (not just its edges) and filters out the background noise and hard shadows.
5. Results
5.1. Method 1: Curve Fitting
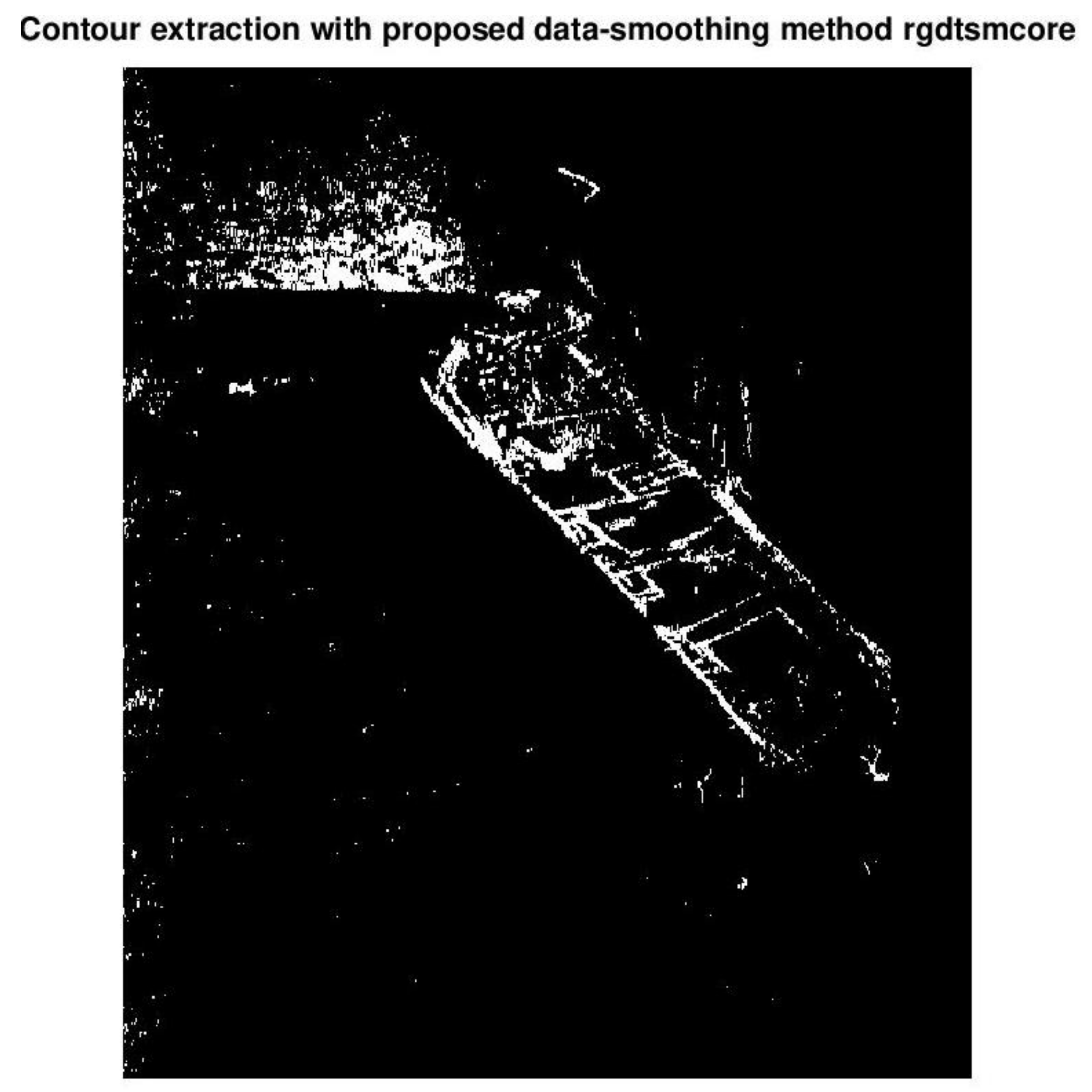
5.2. Method 2: Data Smoothing
5.3. Comparison with Other Methods
5.4. Further Contour Enhancement
5.5. Other Test Images
5.5.1. Test Image Frank Palmer
5.5.2. Test image Shipwreck World
5.5.3. Test Image Boat
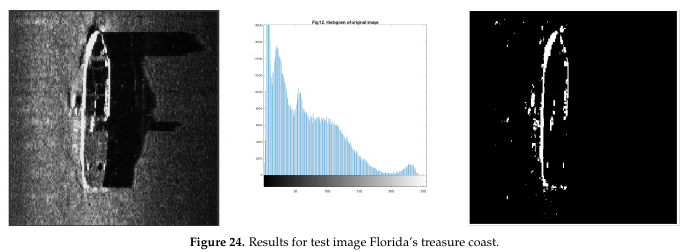
5.5.4. Test Image Florida’s Treasure Coast
5.5.5. Test Image Bike
6. Discussion
6.1. Performance of Method 1
6.2. Performance of Method 2
6.3. Comparison of the Proposed Methods
6.4. Limitations of the Proposed Algorithm and Future Research
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SSS | Side-Scan Sonar |
| PSNR | Peak Signal to Noise Ratio |
| LoG | Laplacian of Gaussian |
References
- Blondel, P. The Handbook of Sidescan Sonar; Springer: New York, NY, USA, 2009. [Google Scholar]
- Chang, Y.-C.; Hsu, S.-K.; Tsai, C.-H. Sidescan Sonar Image Processing: Correcting Brightness Variation and Patching Gaps. J. Mar. Sci. Technol. 2010, 18, 785–789. [Google Scholar] [CrossRef]
- Wikipedia: Side-Scan Sonar. Available online: https://en.wikipedia.org/wiki/Side-scan_sonar (accessed on 18 August 2021).
- Dura, E. Image Processing Techniques for the Detection and Classification of Man Made Objects in Side-Scan Sonar Images. In Sonar Systems; InTech: London, UK, 2011. [Google Scholar]
- Bai, Y.; Bai, Q. Subsea Surveying, Positioning, and Foundation. In Subsea Engineering Handbook; Gulf Professional Publishing: Oxford, UK, 2019. [Google Scholar]
- Galvez, D.S.; Papenmeier, S.; Hass, H.C.; Bartholomae, A.; Fofonova, V.; Wiltshire, K.H. Detecting shifts of submarine sediment boundaries using side-scan mosaics and GIS analyses. Mar. Geol. 2020, 430. [Google Scholar] [CrossRef]
- Fakiris, E.; Blondel, P.; Papatheodorou, G.; Christodoulou, D.; Dimas, X.; Georgiou, N.; Kordella, S.; Dimitriadis, C.; Rzhanov, Y.; Geraga, M.; et al. Multi-Frequency, Multi-Sonar Mapping of Shallow Habitats—Efficacy and Management Implications in the National Marine Park of Zakynthos, Greece. Remote. Sens. 2019, 11, 461. [Google Scholar] [CrossRef] [Green Version]
- Tian, W.-M. Side-scan sonar techniques for the characterization of physical properties of artificial benthic habitats. Braz. J. Oceanogr. 2011, 59, 77–90. [Google Scholar] [CrossRef]
- Westley, K.; McNeary, R. Archaeological applications of low-cost integrated Sidescan sonar/single-beam echosounder Systems in Irish Inland Waterways. Archaeol. Prospect. 2017, 24, 37–57. [Google Scholar] [CrossRef] [Green Version]
- Silva, S.R. (Ed.) Advances in Sonar Technology; In-Teh: Rijeka, Croatia, 2009. [Google Scholar]
- Marques, O. Practical Image and Video Processing Using MATLAB; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Nixon, M.S.; Aguado, A.S. Feature Extraction and Image Processing, 2nd ed.; Elsevier Ltd.: London, UK, 2008. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Mukherjee, A.; Kanrar, S. Enhancement of Image Resolution by Binarization. Int. J. Comput. Appl. 2010, 10. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Liao, P.-S.; Chen, T.-S.; Chung, P.-C. A Fast Algorithm for Multilevel Thresholding. J. Inf. Sci. Eng. 2001, 17, 713–727. [Google Scholar]
- Yuan, X.; Martínez, J.-F.; Eckert, M.; López-Santidrián, L. An Improved Otsu Threshold Segmentation Method for Underwater Simultaneous Localization and Mapping-Based Navigation. Sensors 2016, 16, 1148. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- MATLAB Image Processing Toolbox, User’s Guide, Version 5. Available online: http://www.mathworks.com/access/helpdesk/help/toolbox/images (accessed on 29 July 2021).
- Octave Image Package. Available online: https://octave.sourceforge.io/image (accessed on 29 July 2021).
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using MATLAB; Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Singh, T.R.; Roy, S.; Singh, O.I.; Sinam, T.; Singh, K.M. A New Local Adaptive Thresholding Technique in Binarization. Int. J. Comput. Sci. 2011, 8, 271–277. [Google Scholar]
- Arora, S.; Acharya, J.; Verma, A.; Panigrahi, P.K. Multilevel thresholding for image segmentation through a fast statistical recursive algorithm. Pattern Recognit. Lett. 2008, 29, 119–125. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.C.; Wang, L.L. A fast multilevel thresholding method based on lowpass and highpass filtering. Pattern Recognit. Lett. 1977, 18, 1469–1478. [Google Scholar] [CrossRef]
- Whatmough, R.J. Automatic threshold selection from a histogram using the exponential hull. Graph. Models Image Process. 1991, 53, 592–600. [Google Scholar] [CrossRef]
- Sri Veera Sagar, C.; Rama Devi, K. A new approach of edge detection in SAR images using region-based active contours. Int. J. Res. Eng. Technol. 2013, 2, 308–313. [Google Scholar]
- Sezgin, M.; Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13, 146–165. [Google Scholar]
- Chaki, N.; Shaikh, S.H.; Saeed, K. A comprehensive survey on image binarization techniques. Explor. Image Binariz. Tech. 2014, 5–15. [Google Scholar] [CrossRef]
- More, P.K.; Dighe, D.D. A Review on Document Image Binarization Technique for Degraded Document Images. Int. Res. J. Eng. Technol. 2016, 3, 1132–1138. [Google Scholar]
- Klaucke, I. Sidescan Sonar. In Submarine Geomorphology, Springer Geology; Springer International Publishing AG: Bavaria, Germany, 2018. [Google Scholar] [CrossRef]
- Bergmann, P.G. Problems in Sonar Data Research. J. Acoust. Soc. Am. 1947, 19, 726. [Google Scholar] [CrossRef]
- Vijayan, M.; Mohan, R. Background Modeling Using Deep-Variational Autoencoder. In Proceedings of the Intelligent Systems Design and Applications, Vellore, India, 6–8 December 2018; Volume 940. [Google Scholar]
- Granéli, E.; Granéli, W. Nitrogen in Inland Seas. In Nitrogen in the Marine Environment, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2008; Available online: https://www.sciencedirect.com/topics/engineering/halocline (accessed on 17 August 2021).
- Soille, P. Morphological Image Analysis; Principles and Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Programmer All. Implementation of Corrosion Expansion Algorithm Based on MATLAB. Available online: https://www.programmerall.com/article/16271296042 (accessed on 16 August 2021).
- MATLAB. Types of Morphological Operations. Available online: https://www.mathworks.com/help/images/morphological-dilation-and-erosion.html (accessed on 18 August 2021).
- Mathworks MATLAB Polyfit Function. Available online: https://www.mathworks.com/help/matlab/ref/polyfit.html (accessed on 30 July 2021).
- Octave Polyfit Function. Available online: https://octave.sourceforge.io/octave/function/polyfit.html (accessed on 23 August 2021).
- Mathworks MATLAB Polyval Function. Available online: https://www.mathworks.com/help/matlab/ref/polyval.html (accessed on 30 July 2021).
- Octave Polyval Function. Available online: https://octave.sourceforge.io/octave/function/polyval.html (accessed on 23 August 2021).
- Octave Regdatasmooth Function. Available online: https://octave.sourceforge.io/data-smoothing/function/regdatasmooth.html (accessed on 29 July 2021).
- Octave Rgdtsmcore Function. Available online: https://octave.sourceforge.io/data-smoothing/function/rgdtsmcore.html (accessed on 29 July 2021).
- Octave Data-Smoothing Package. Available online: https://octave.sourceforge.io/data-smoothing/overview.html (accessed on 29 July 2021).
- Khidkikar, M.; Balasubramanian, R. Segmentation and Classification of Side-Scan Sonar Data. In Proceedings of the Intelligent Robotics and Applications, Montreal, QC, Canada, 3–5 October 2012. [Google Scholar]
- Reed, S.; Petillot, Y.; Bell, J. An Automatic Approach to the Detection and Extraction of Mine Features in Sidescan Sonar. IEEE J. Ocean. Eng. 2003, 28, 90–105. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Process |
|---|---|
| 1 | Input grayscale image |
| 2 | Compute the histogram |
| 3 | Calculate the envelope of the histogram |
| 4 | Approximate the envelope with a curve |
| 5 | Compute minima (valleys) of the curve |
| 6 | Compute optimal threshold |
| 7 | Produce binary image |
| Otsu | Optimal | Gonzalez | Curve Fitting | Regdatasmooth | Rgdtsmcore |
|---|---|---|---|---|---|
| 110 | 111 | 111 | 234 | 232 | 236 |
| 0.43137 | 0.43628 | 0.43628 | 0.91765 | 0.9098 | 0.9255 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andreatos, A.; Leros, A. Contour Extraction Based on Adaptive Thresholding in Sonar Images. Information 2021, 12, 354. https://doi.org/10.3390/info12090354
Andreatos A, Leros A. Contour Extraction Based on Adaptive Thresholding in Sonar Images. Information. 2021; 12(9):354. https://doi.org/10.3390/info12090354
Chicago/Turabian StyleAndreatos, Antonios, and Apostolos Leros. 2021. "Contour Extraction Based on Adaptive Thresholding in Sonar Images" Information 12, no. 9: 354. https://doi.org/10.3390/info12090354
APA StyleAndreatos, A., & Leros, A. (2021). Contour Extraction Based on Adaptive Thresholding in Sonar Images. Information, 12(9), 354. https://doi.org/10.3390/info12090354