
Robustness Analysis of an Electrohydraulic Steering Control System Based on the Estimated Uncertainty Model



Abstract
:1. Introduction
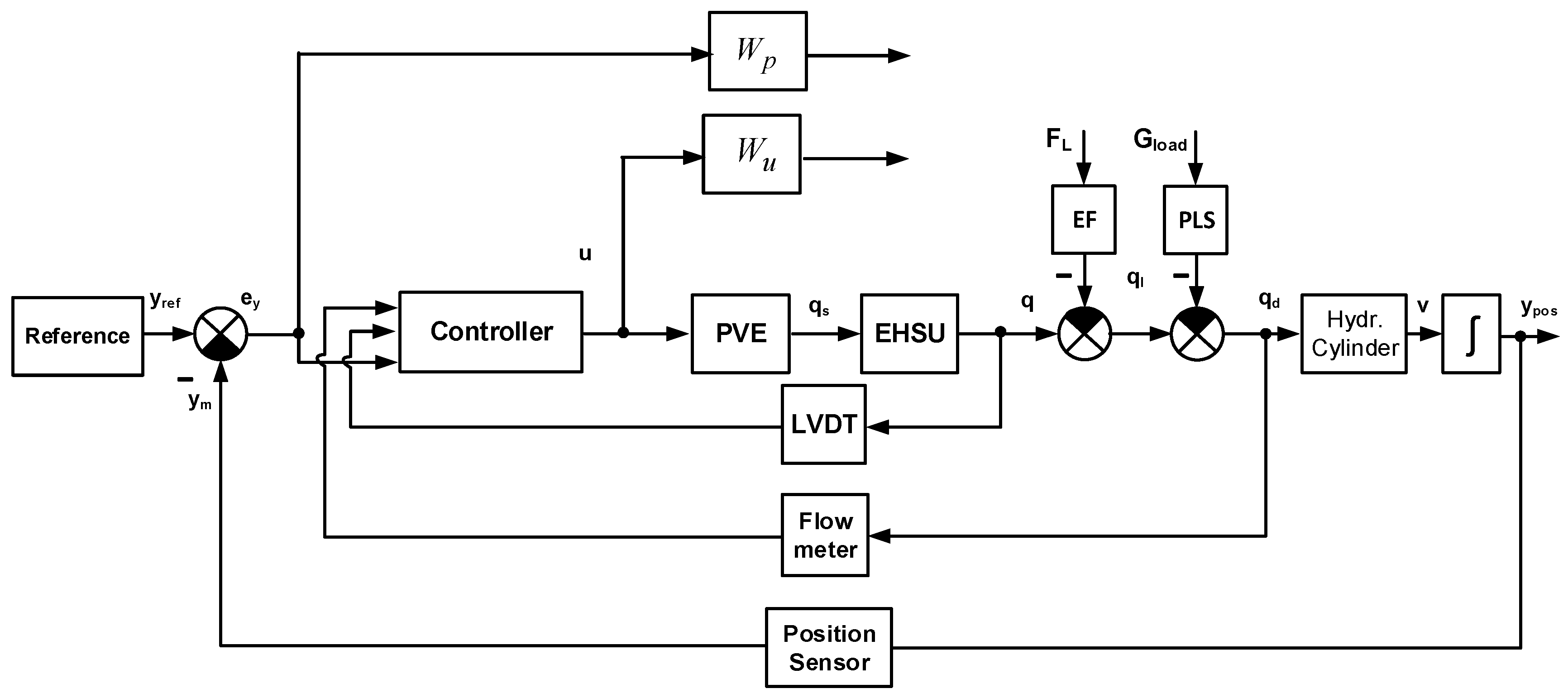
2. Nominal Servo System Model
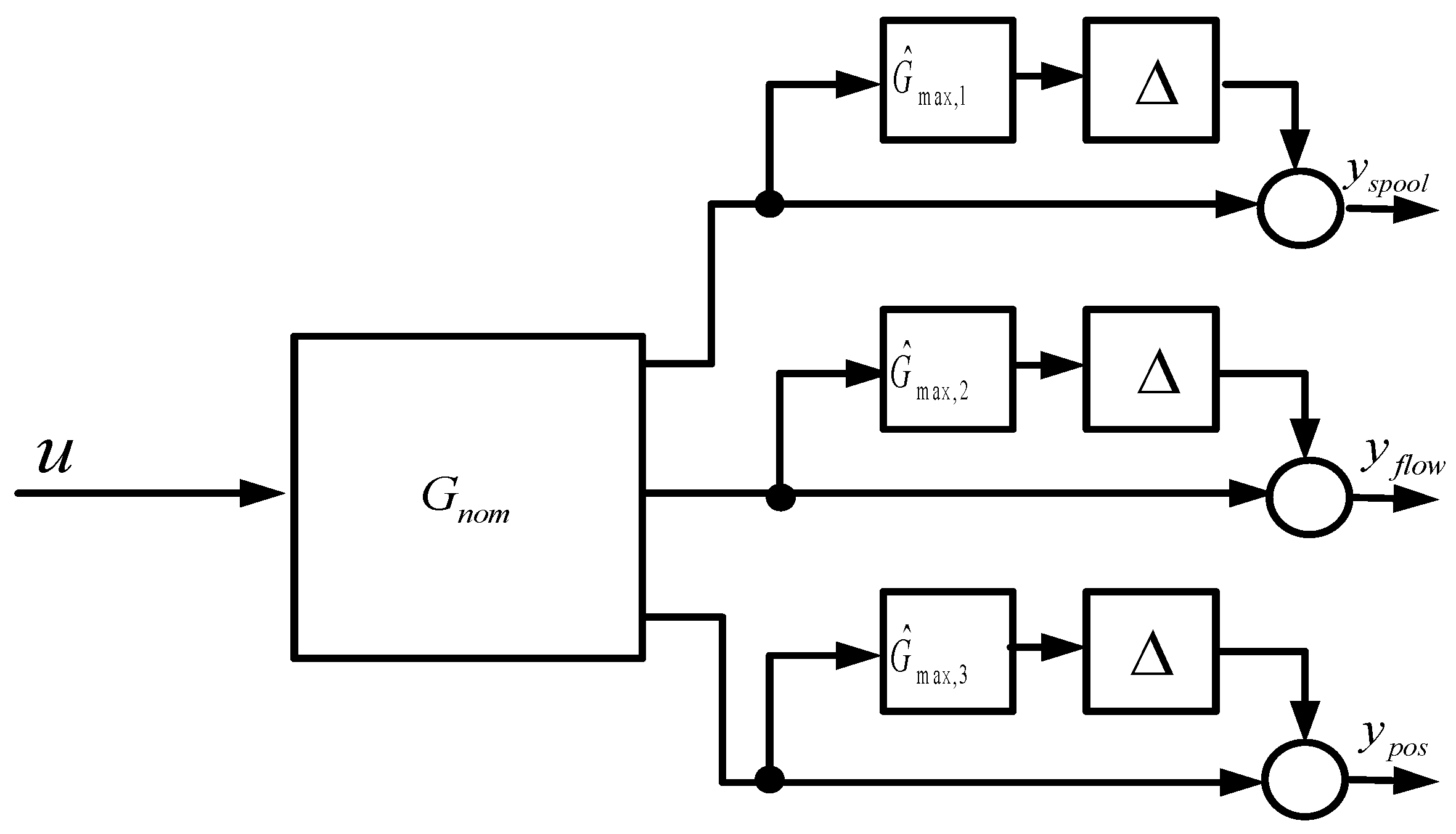
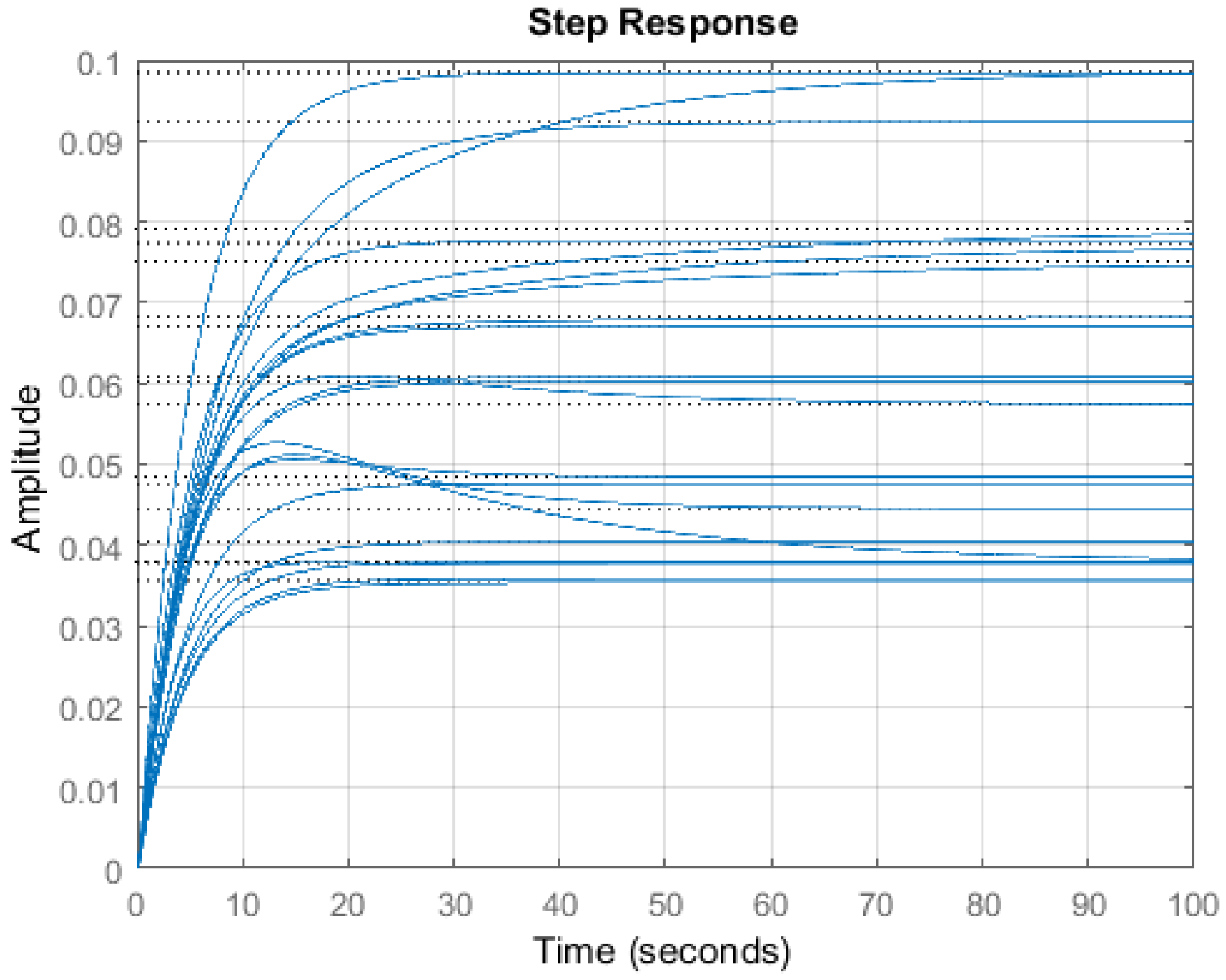
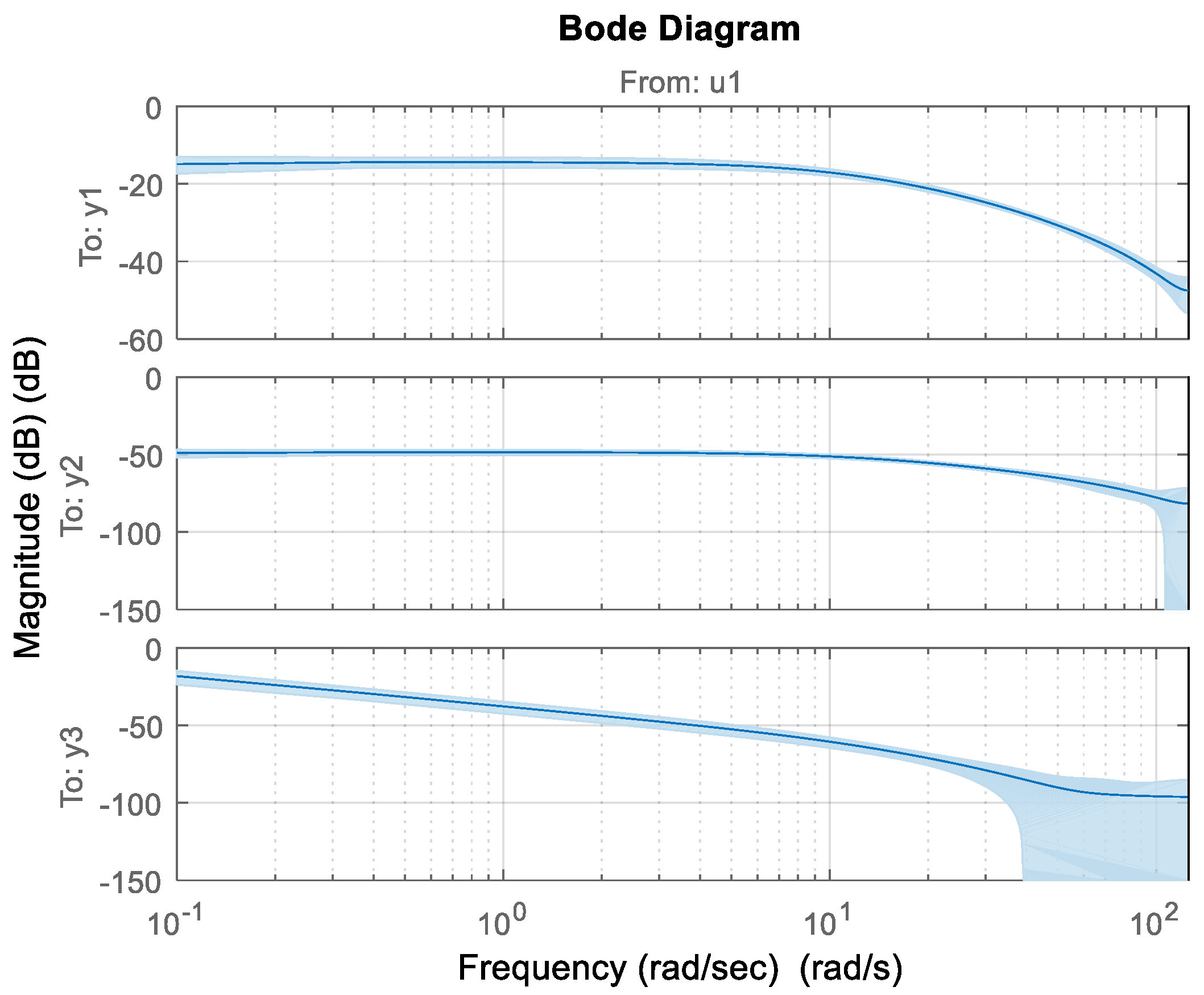
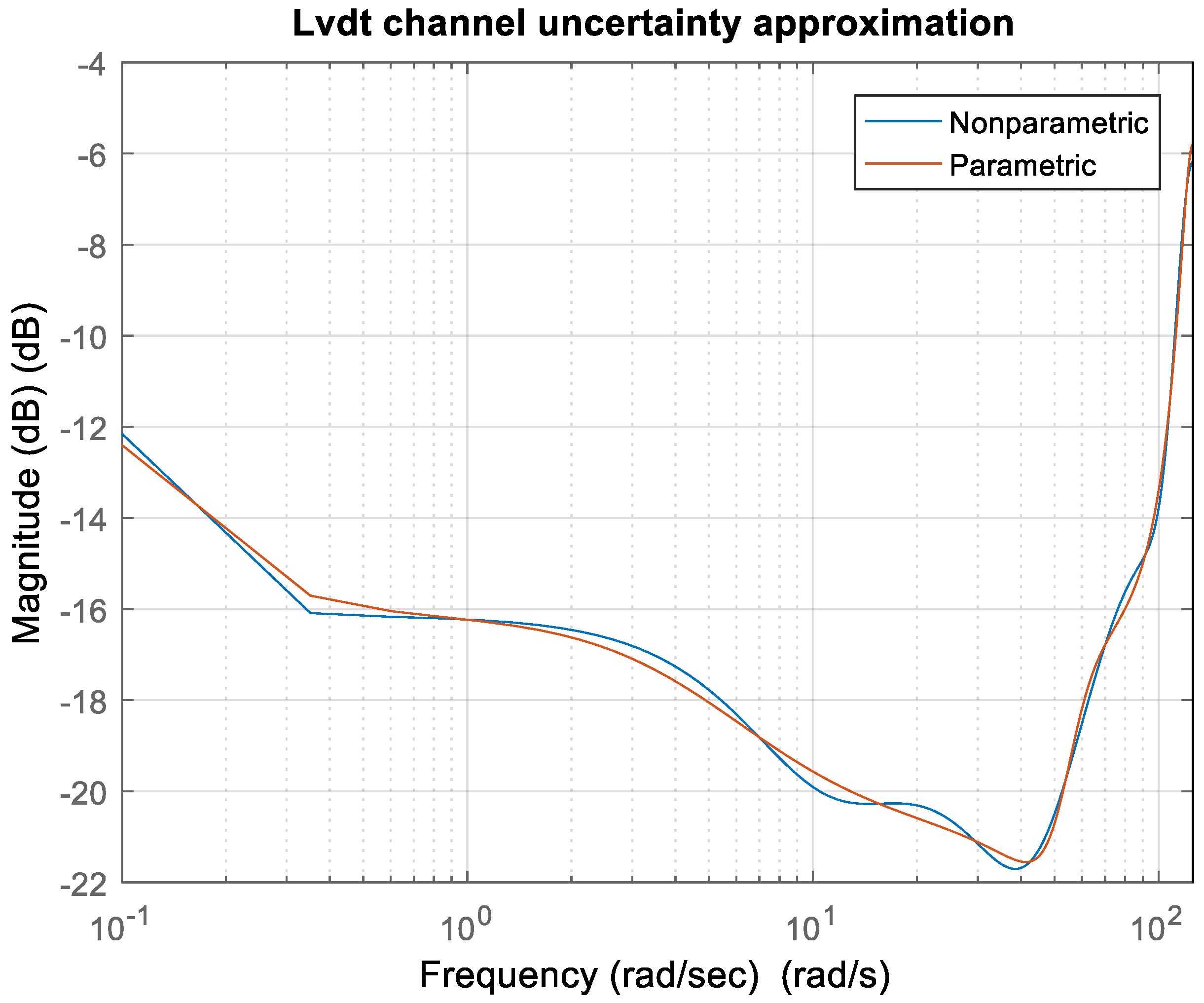
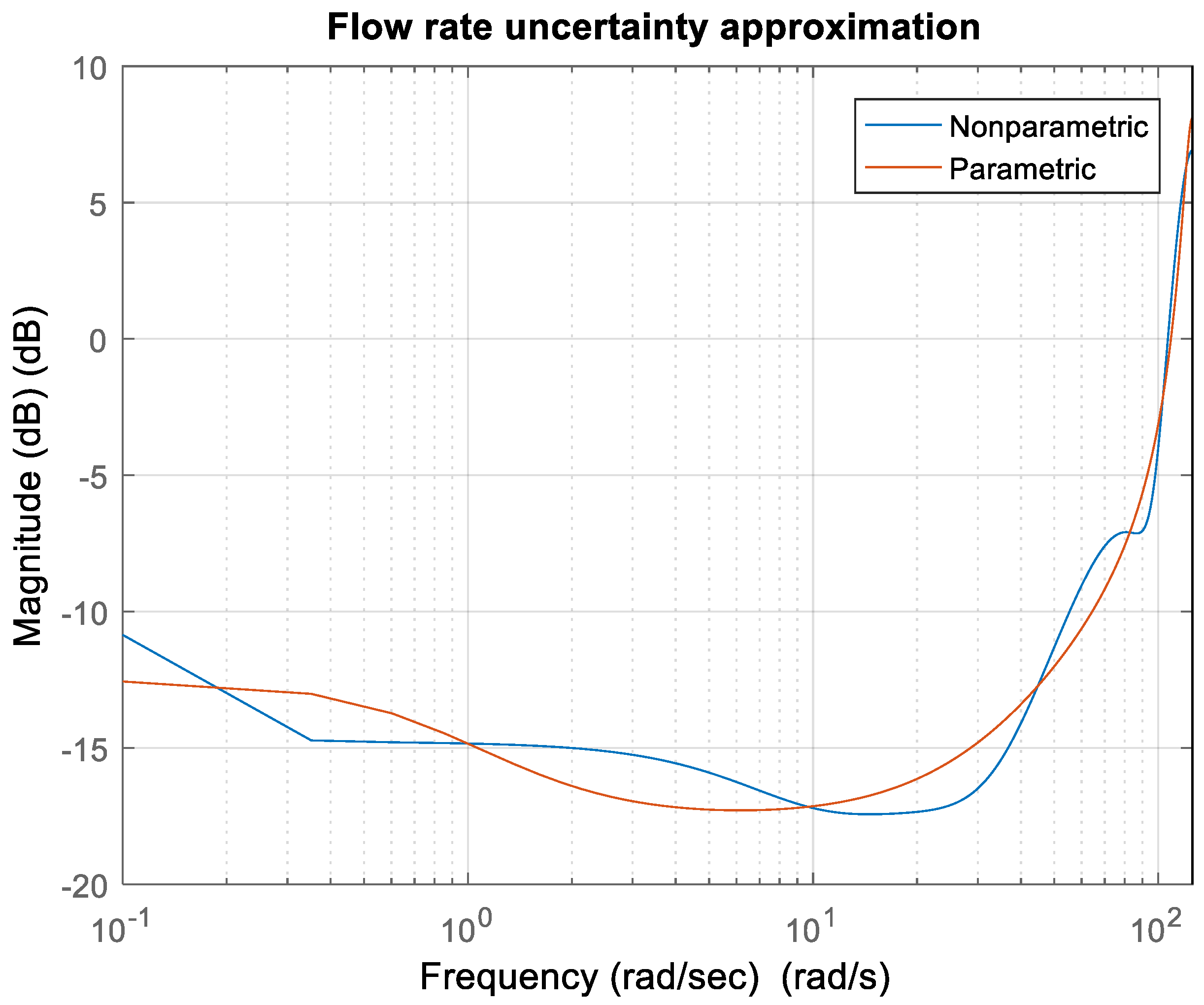
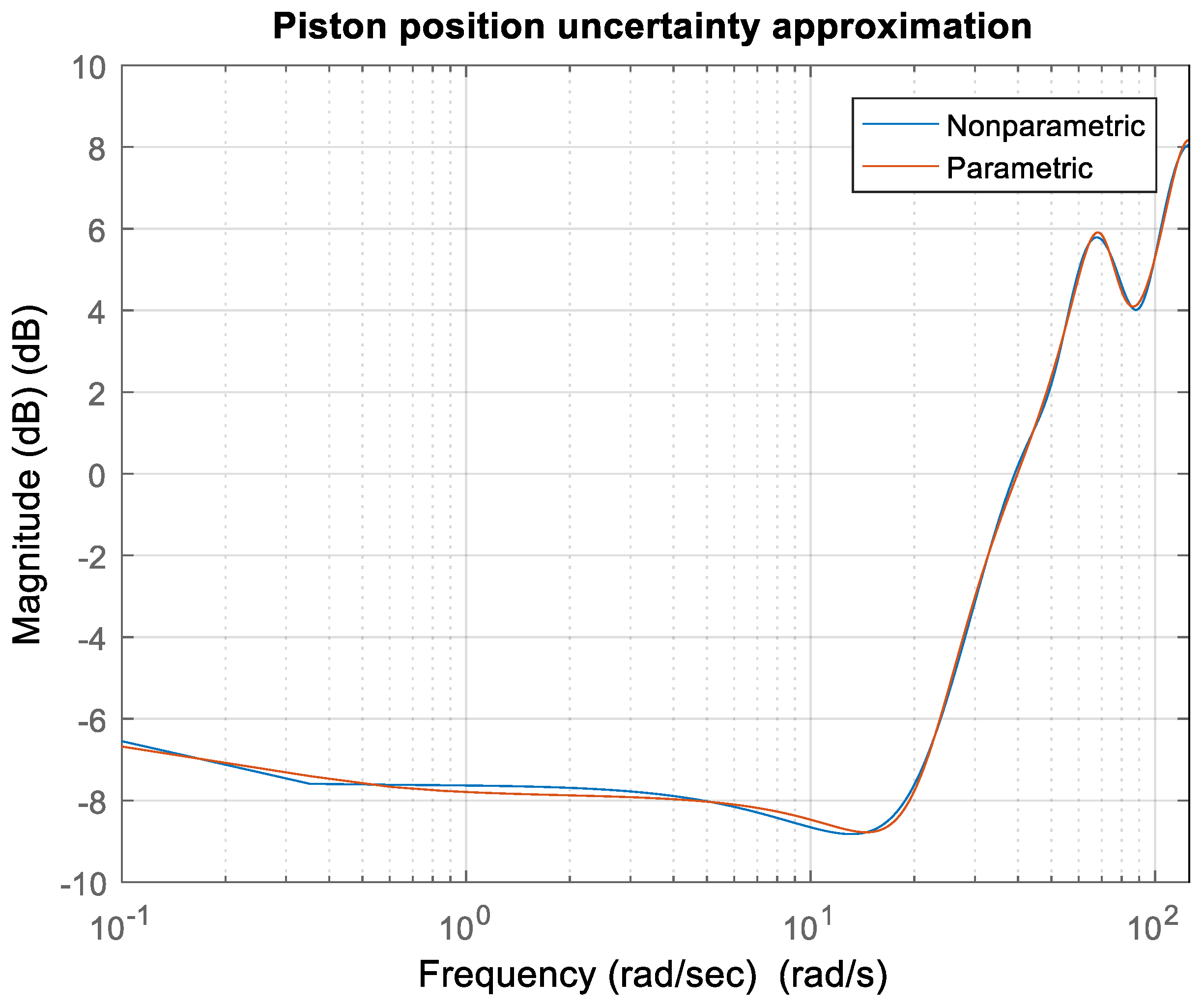
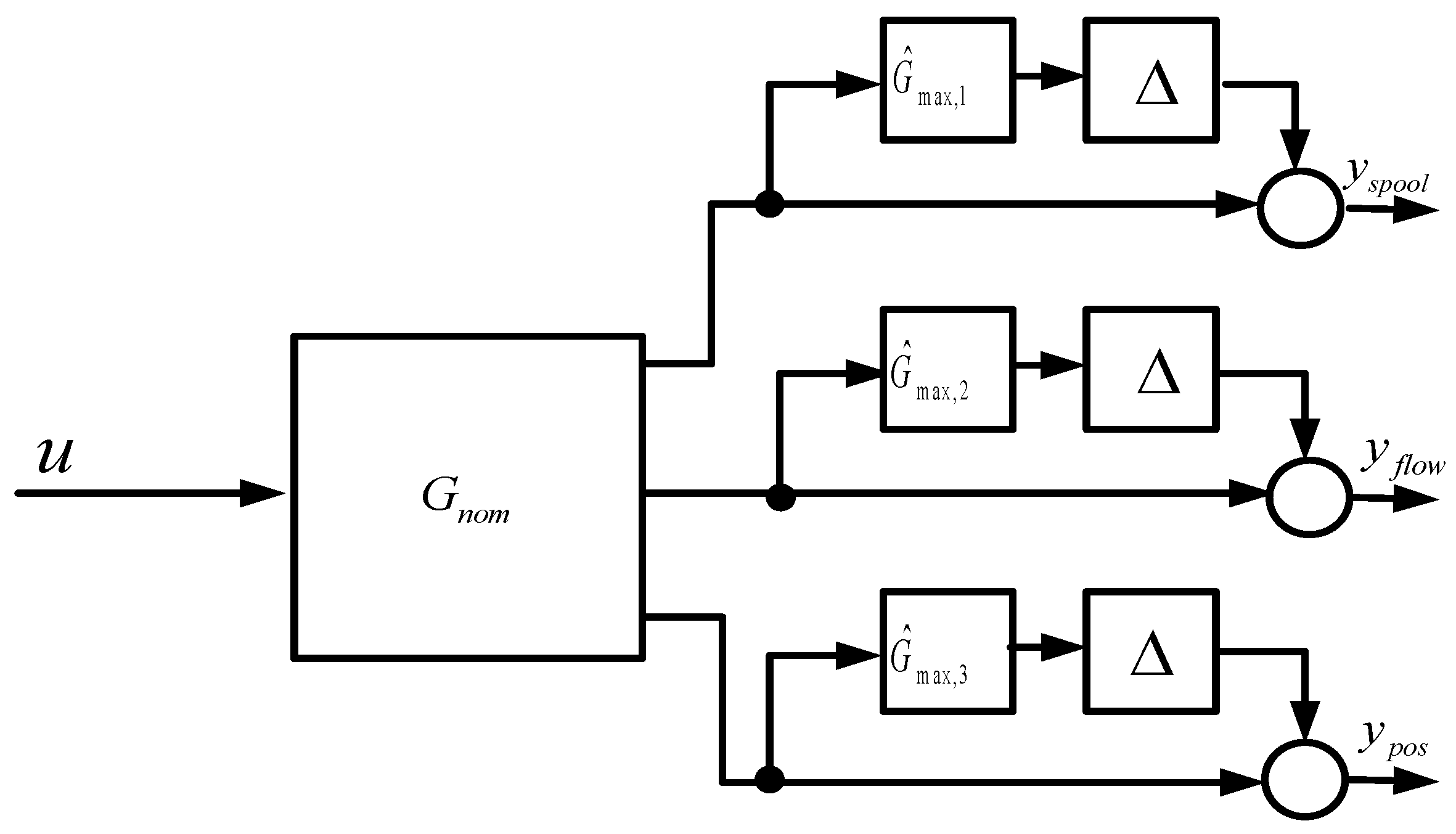
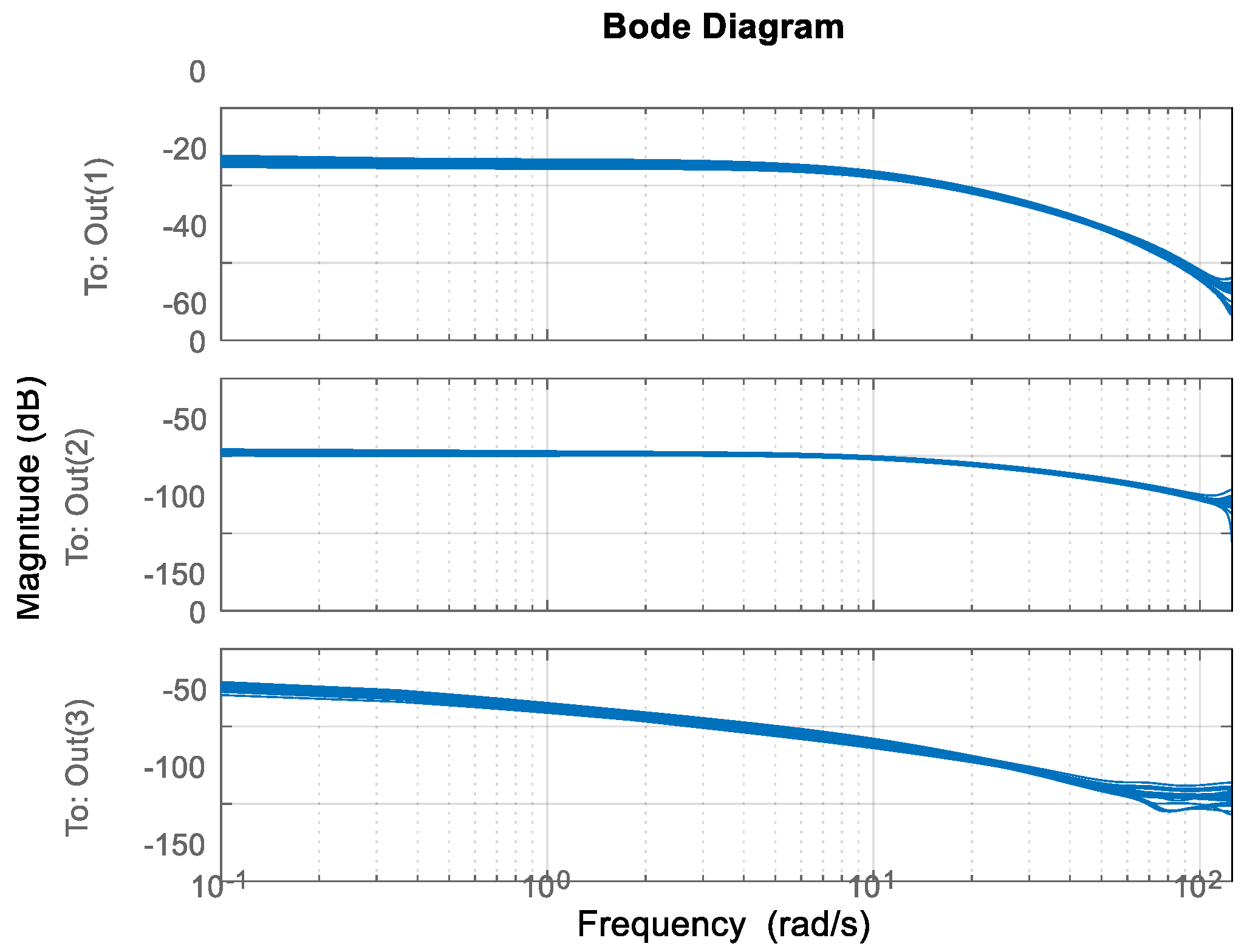
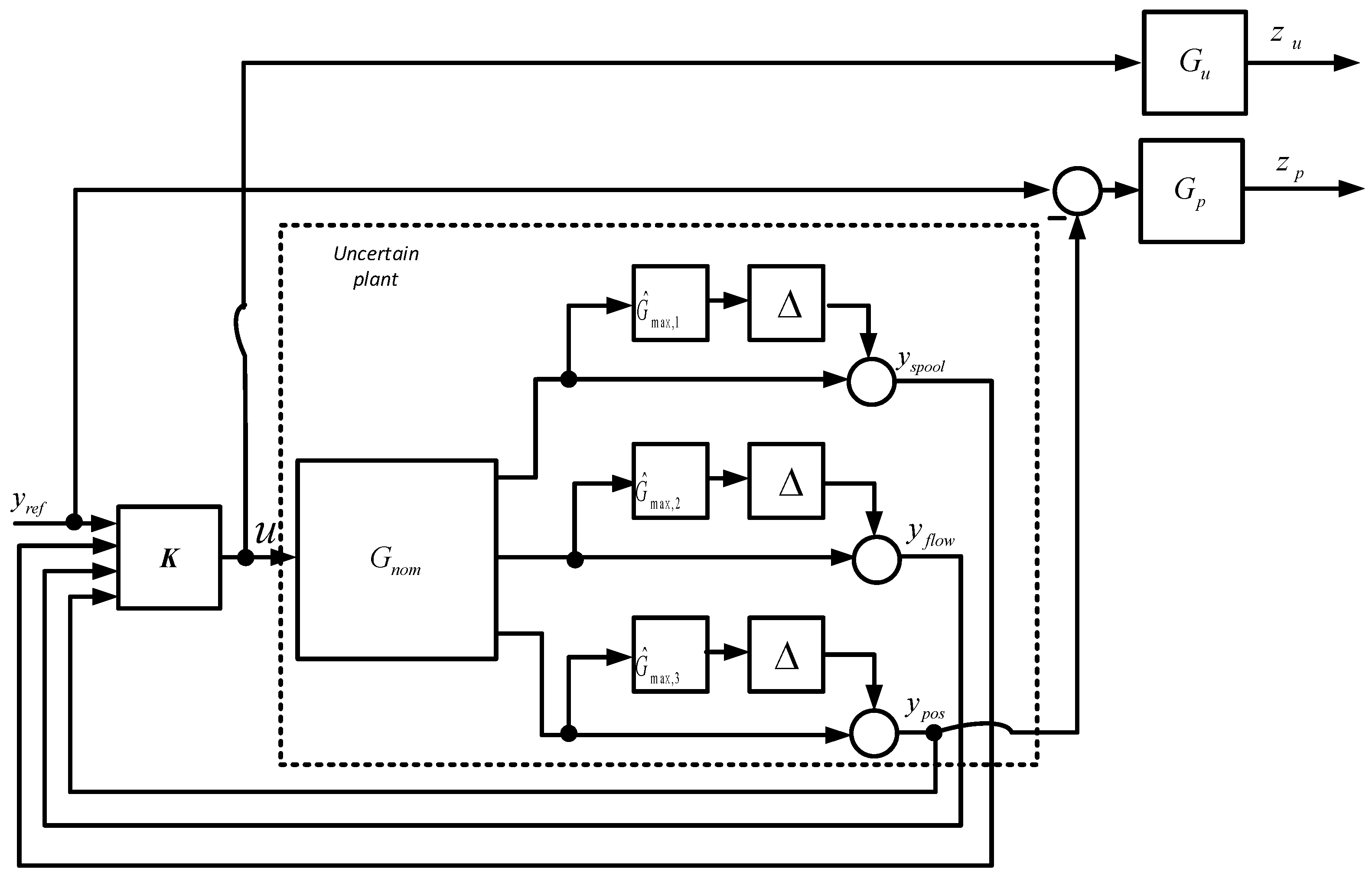
3. Uncertainty Servo System Model
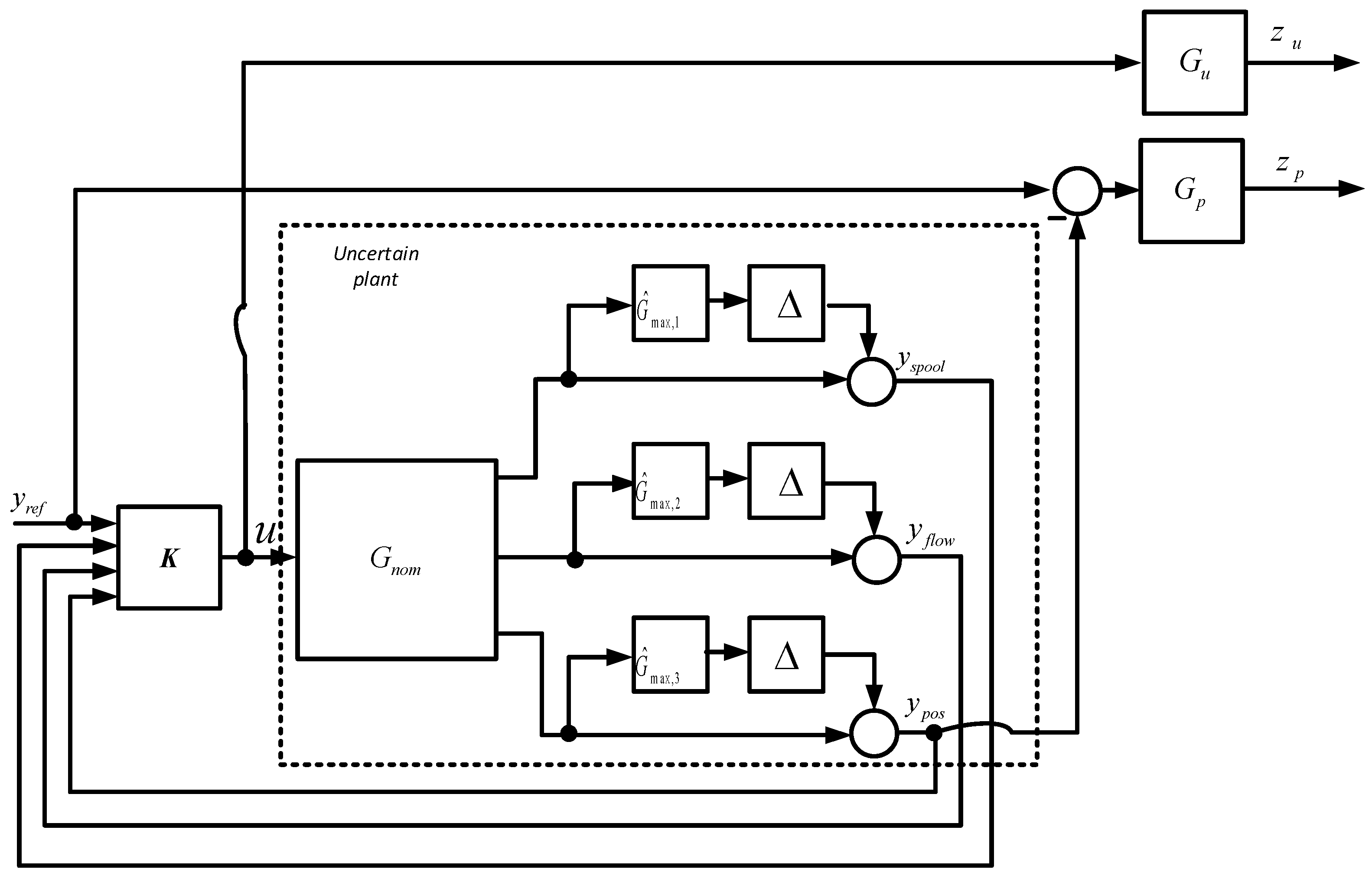
4. Design of LQG and H∞ Controllers
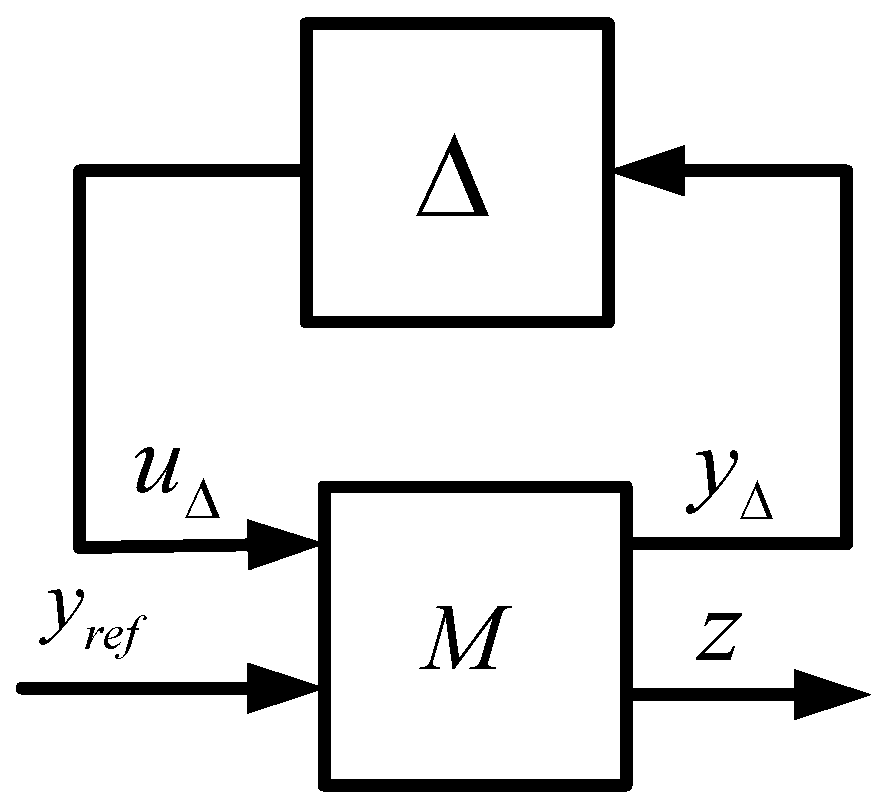
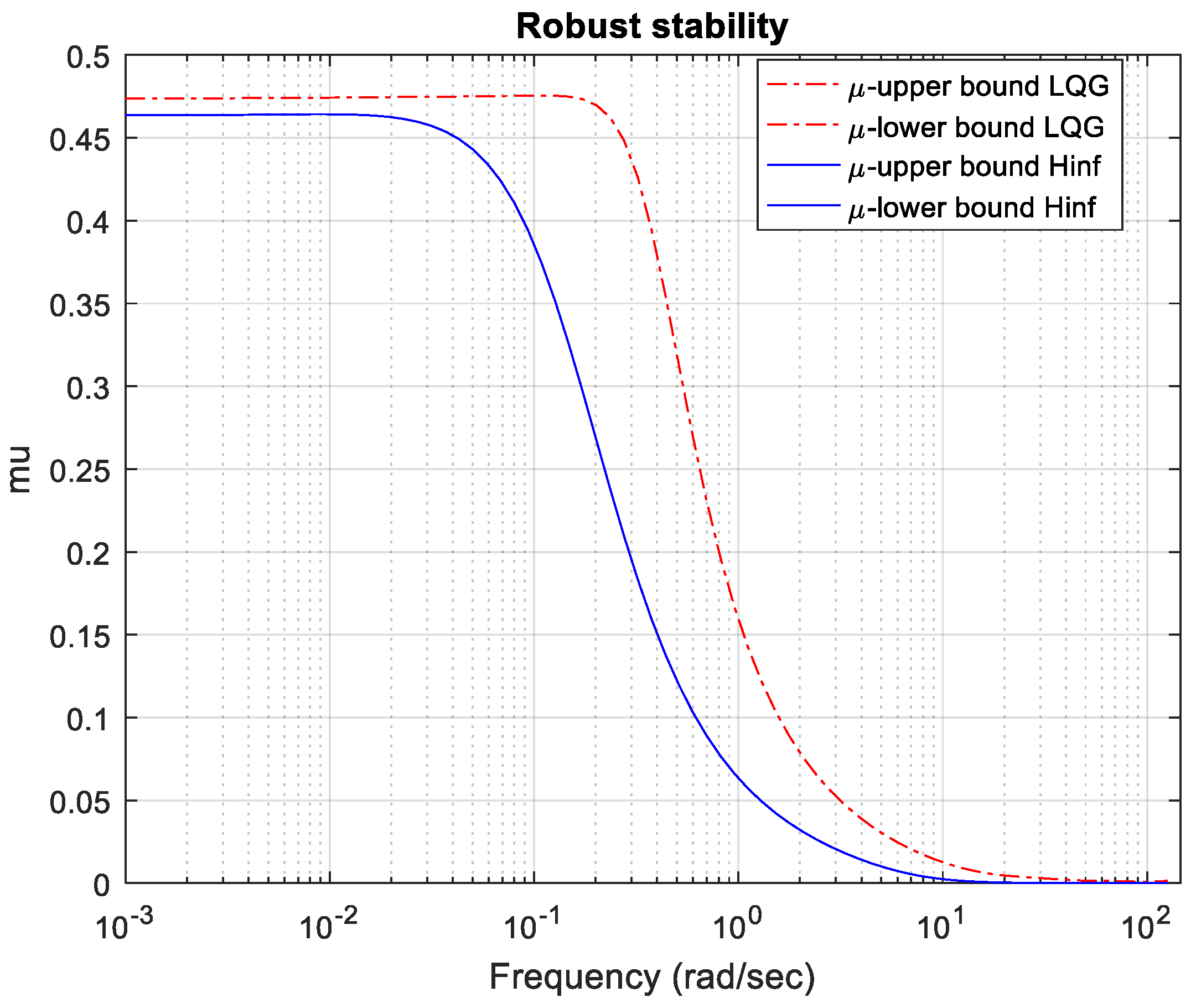
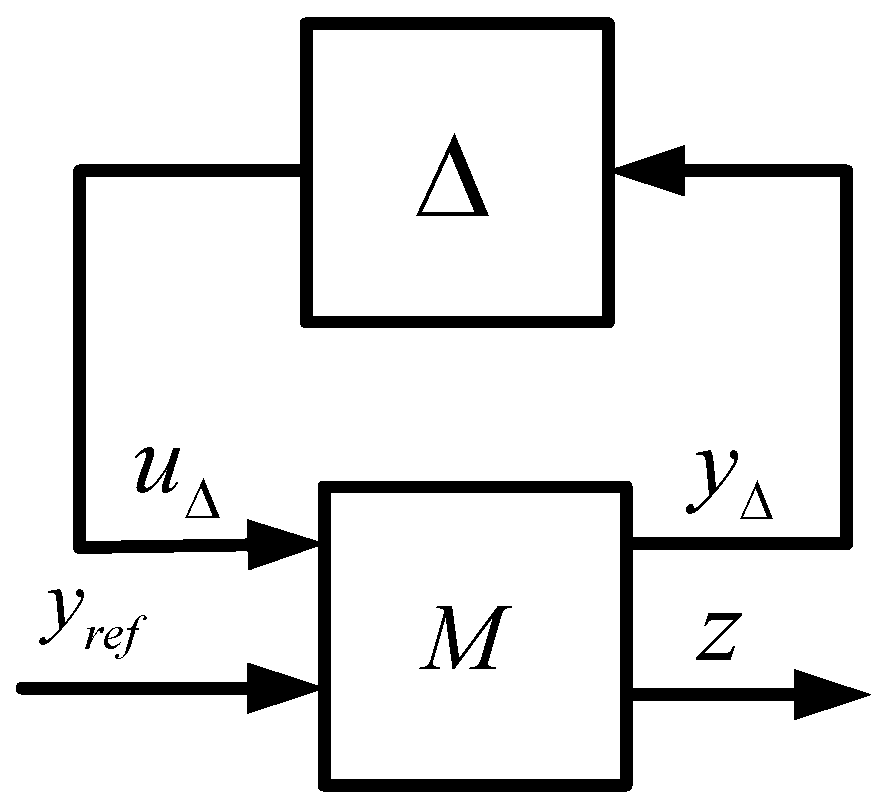
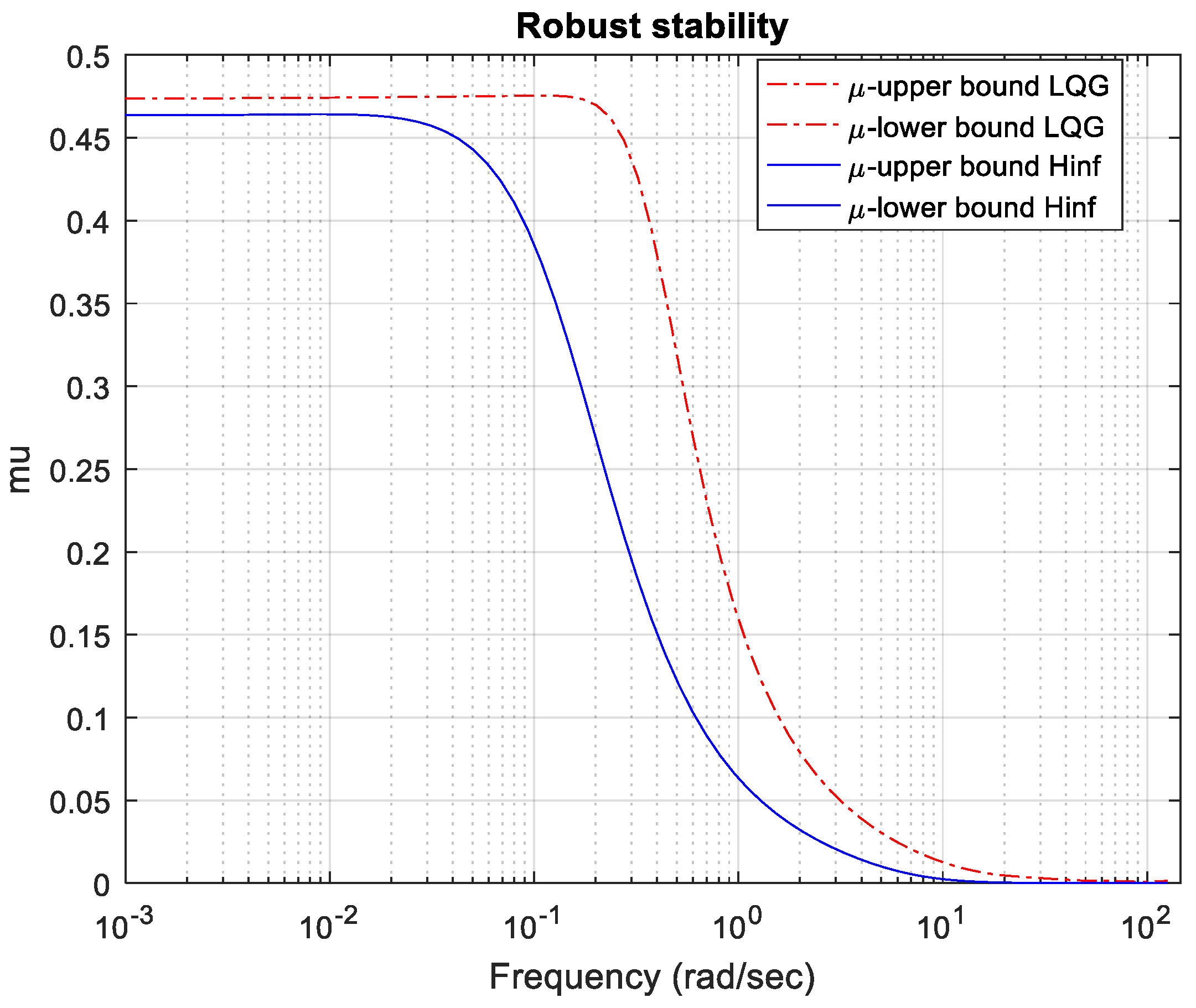
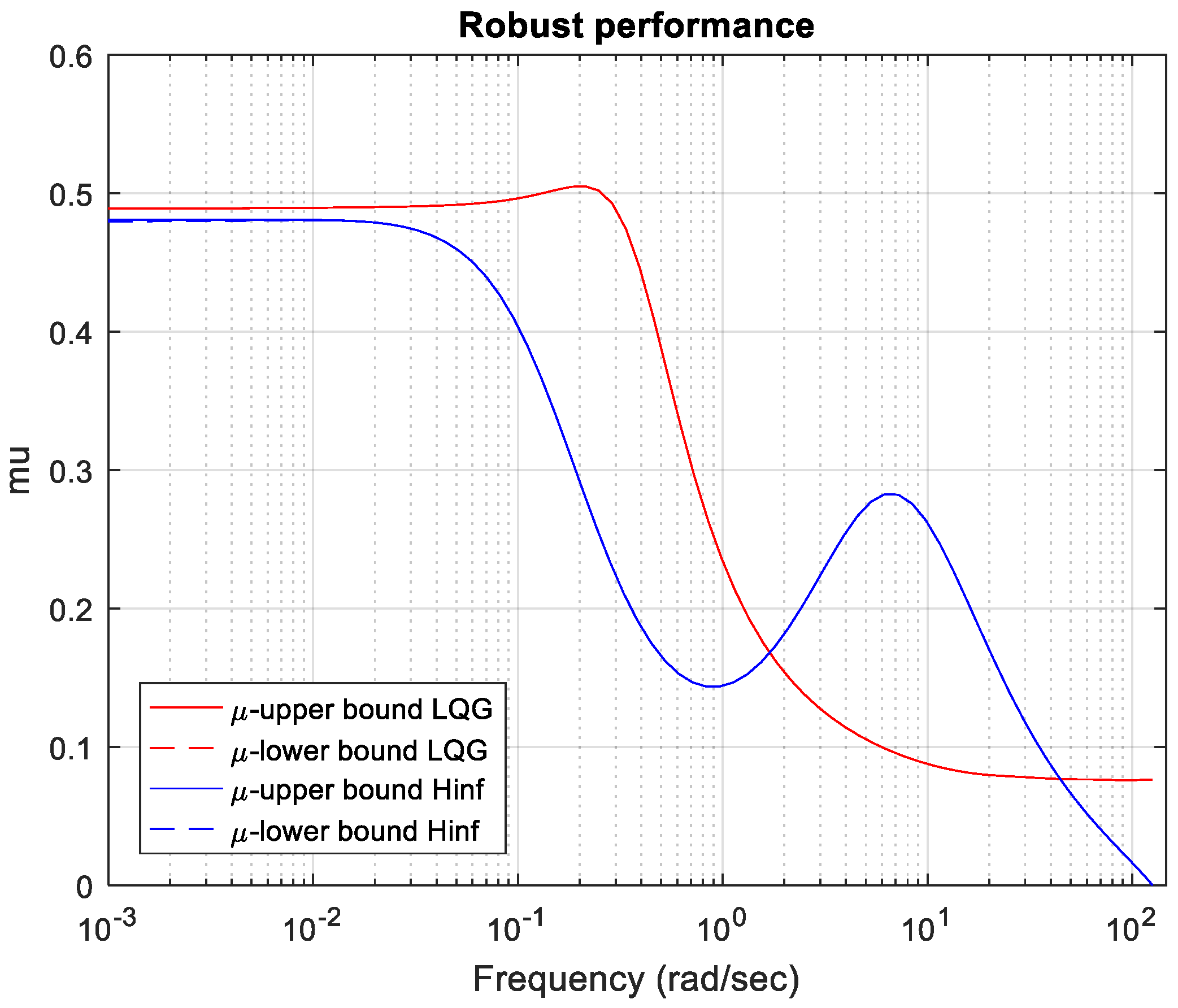
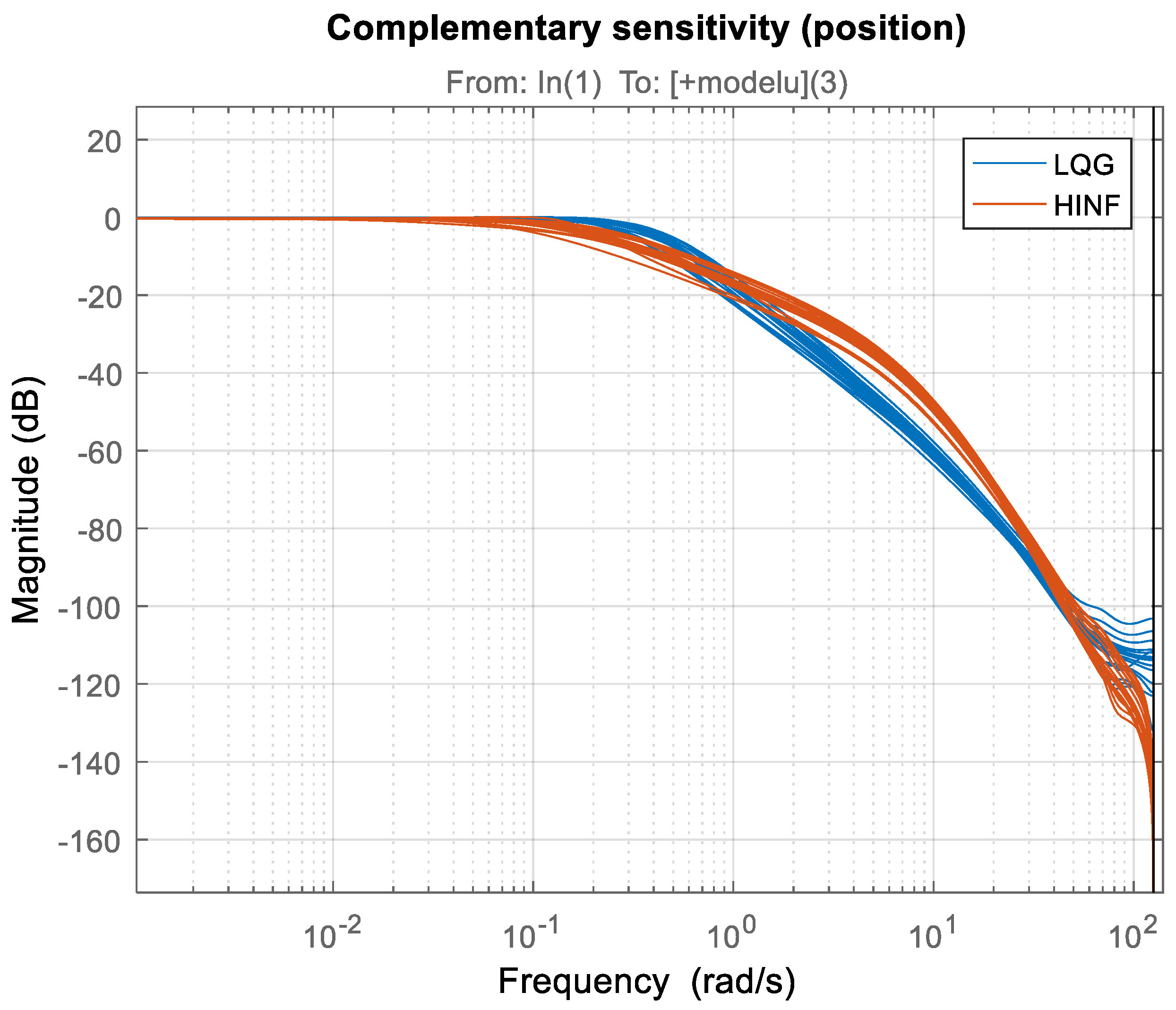
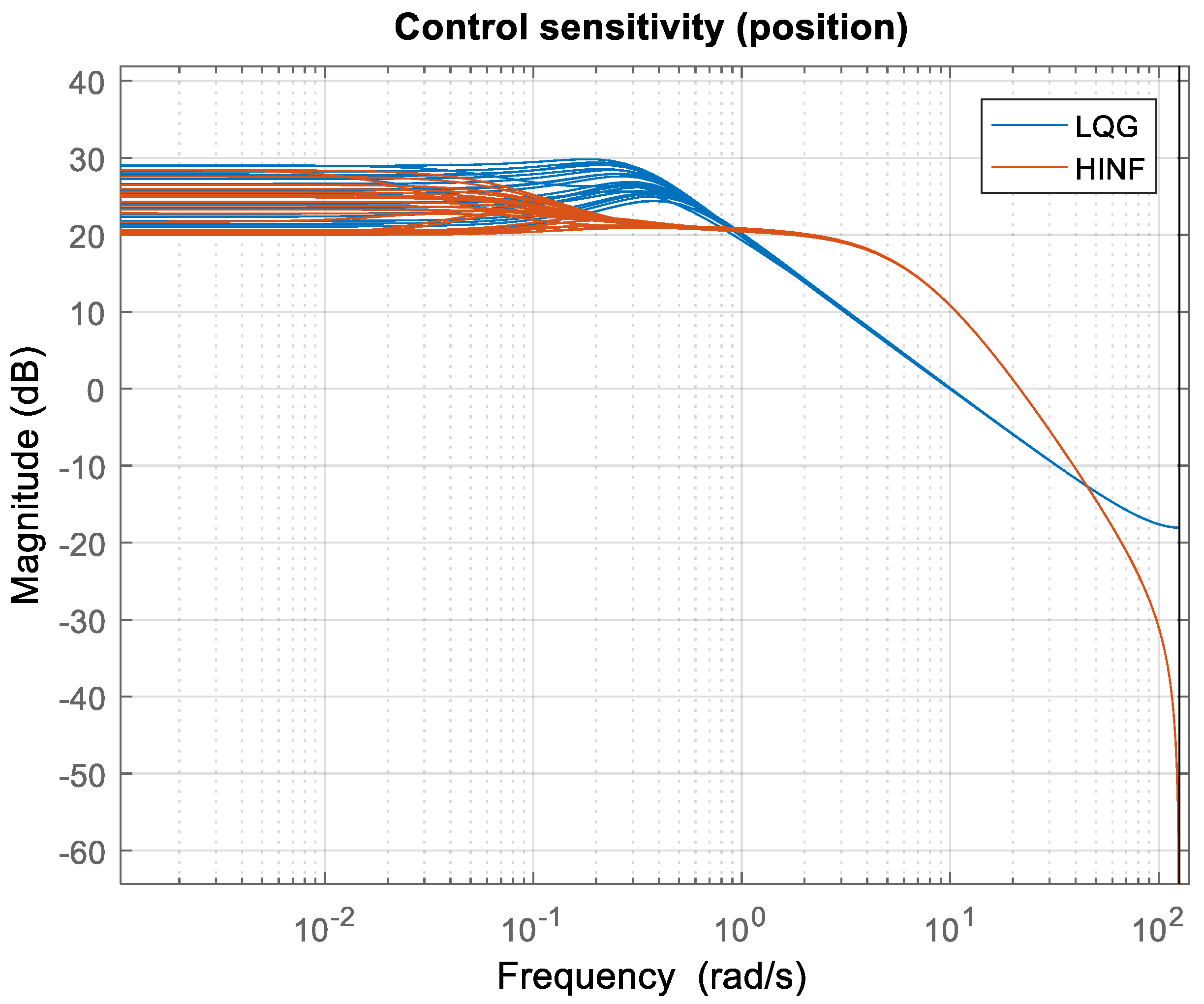
5. Robust Stability and Robust Performance Analysis
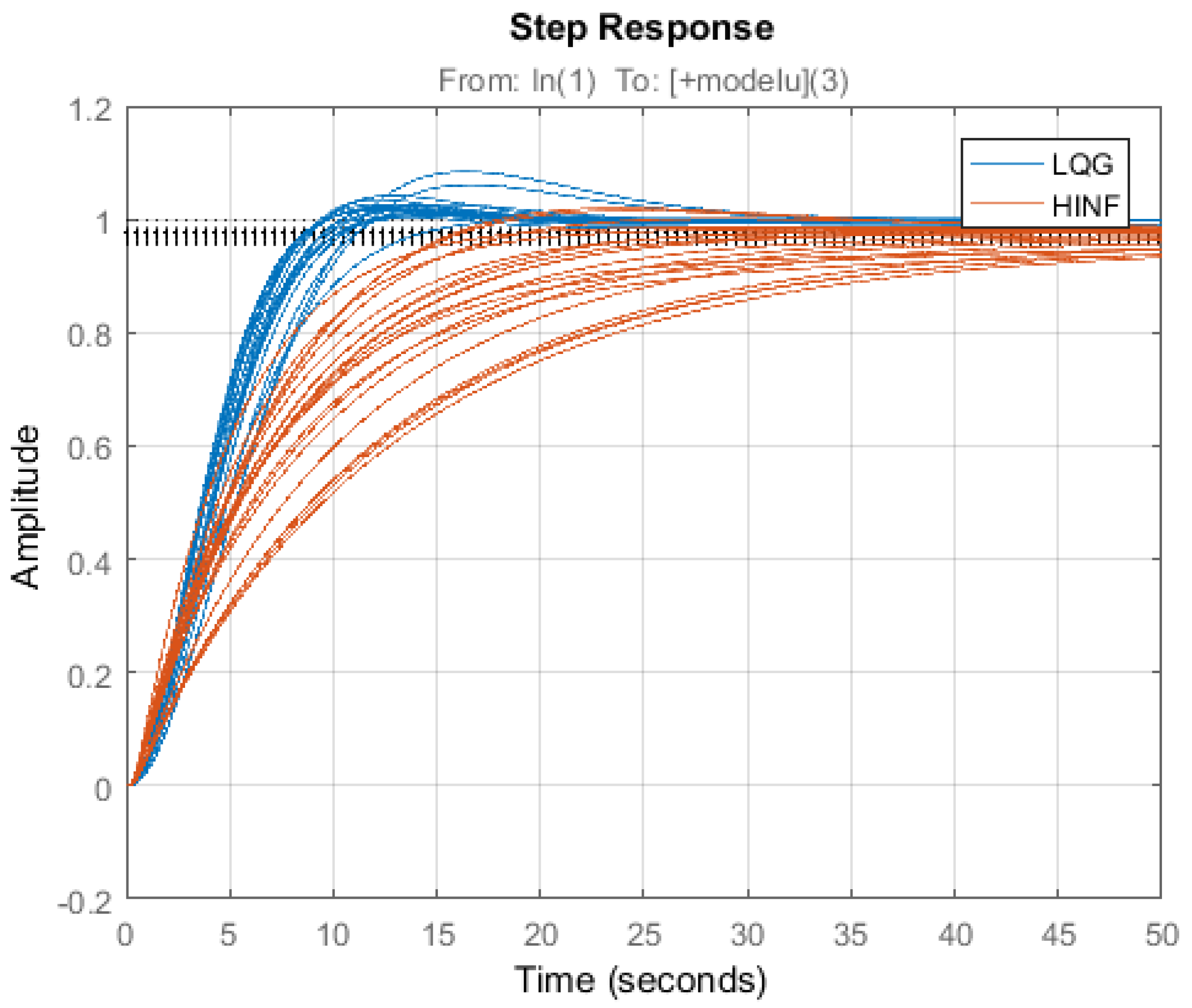
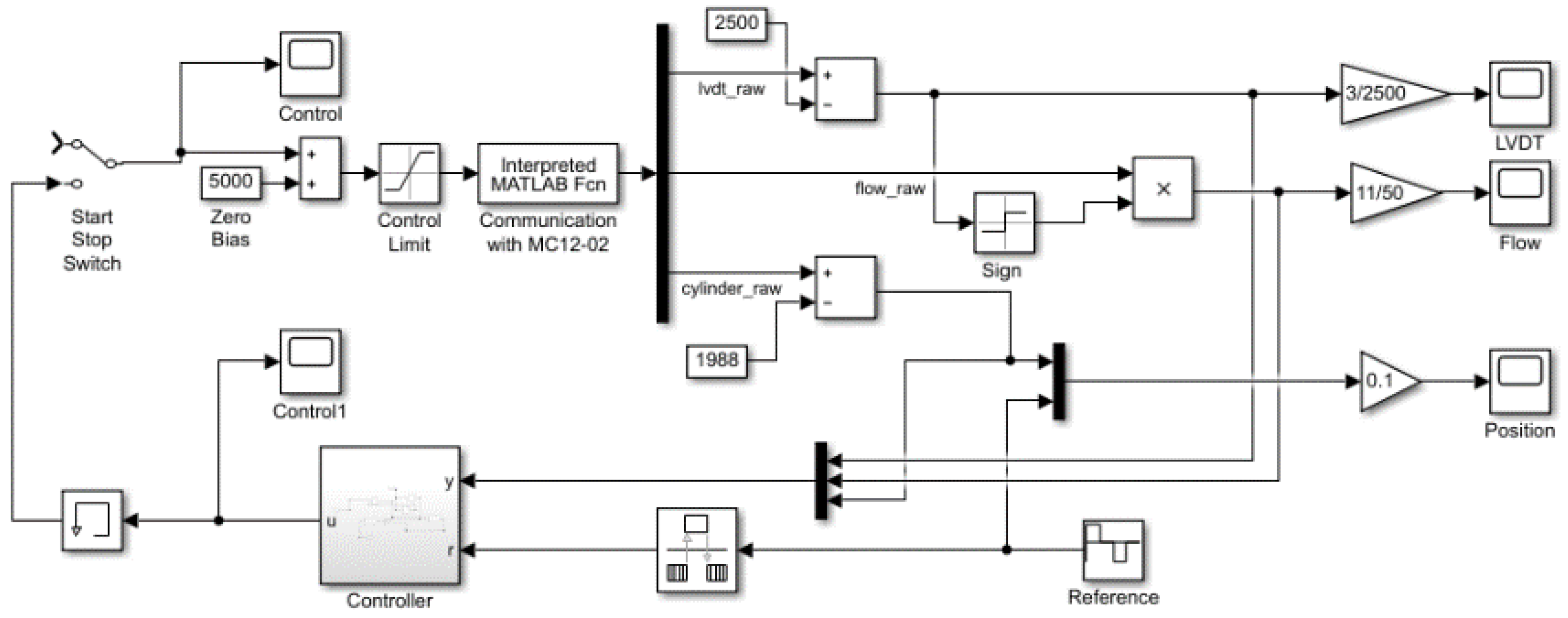
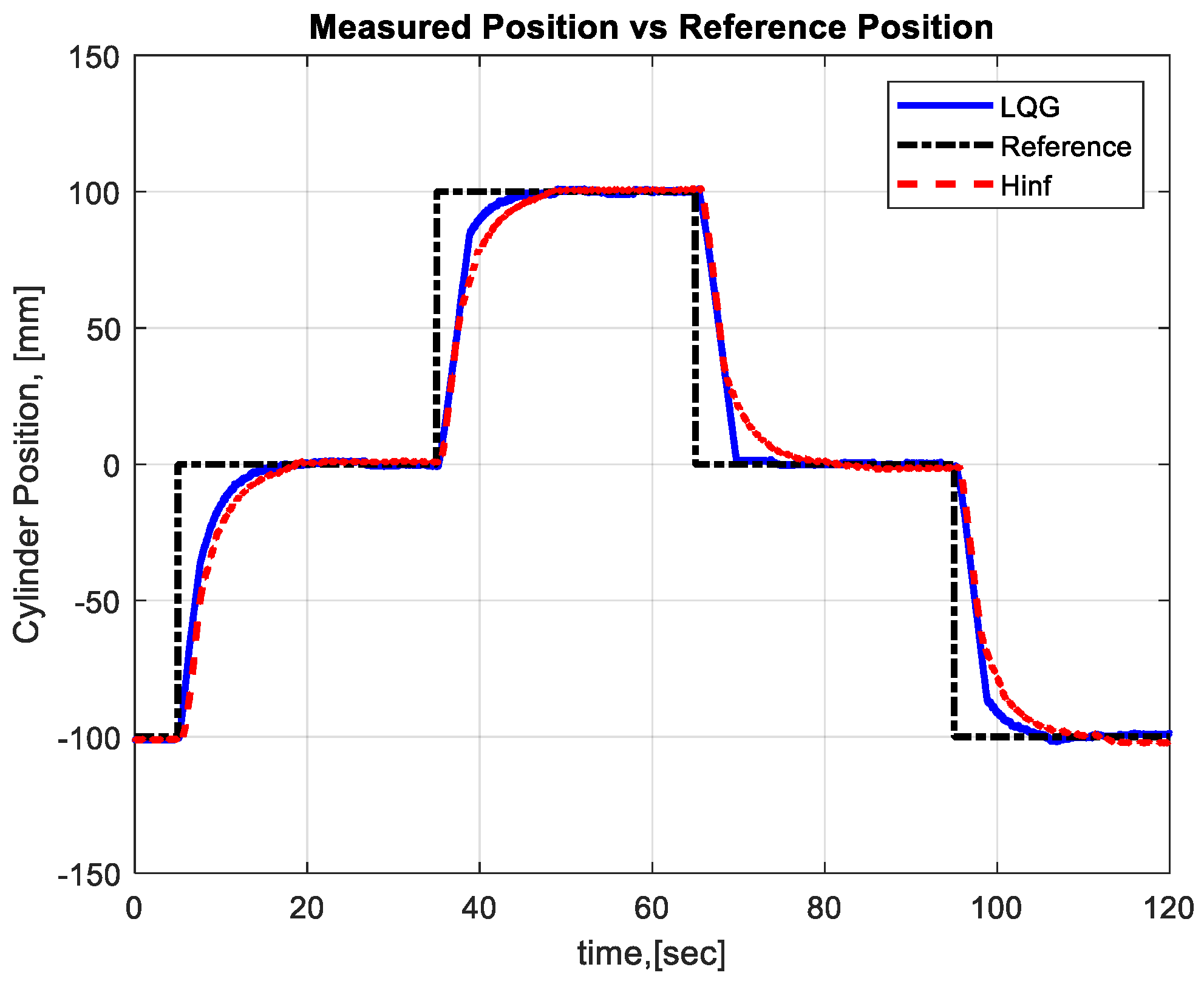
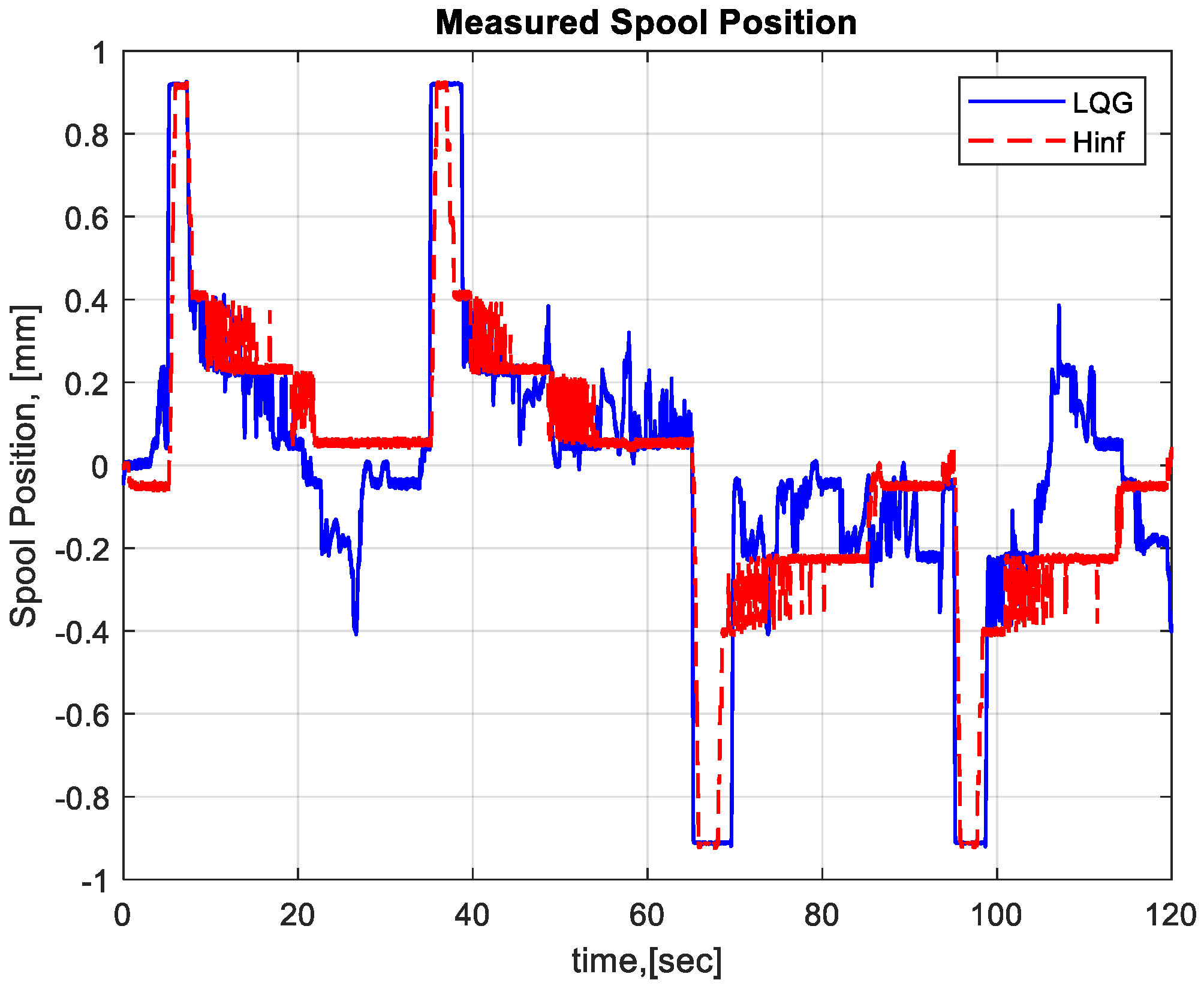
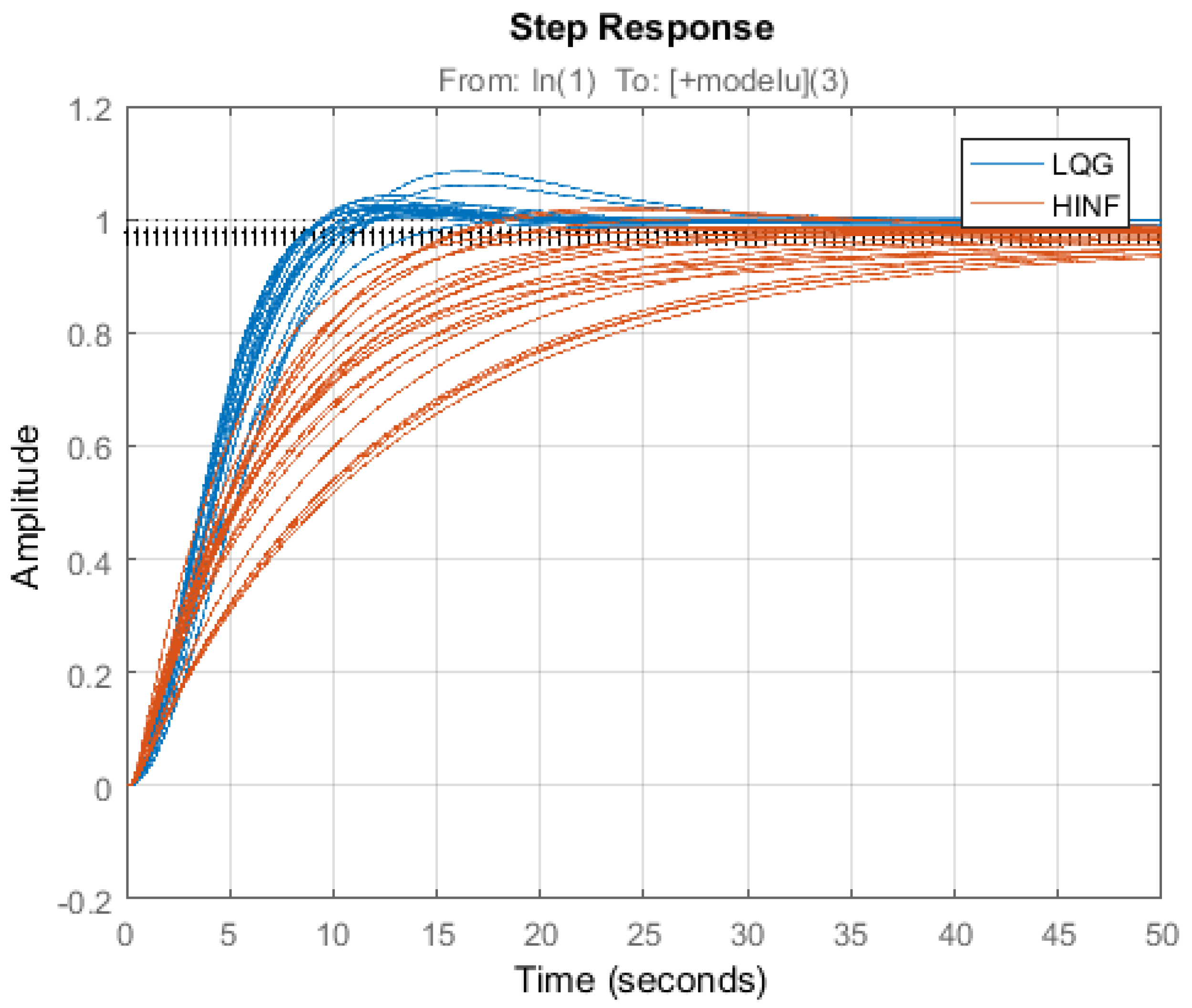
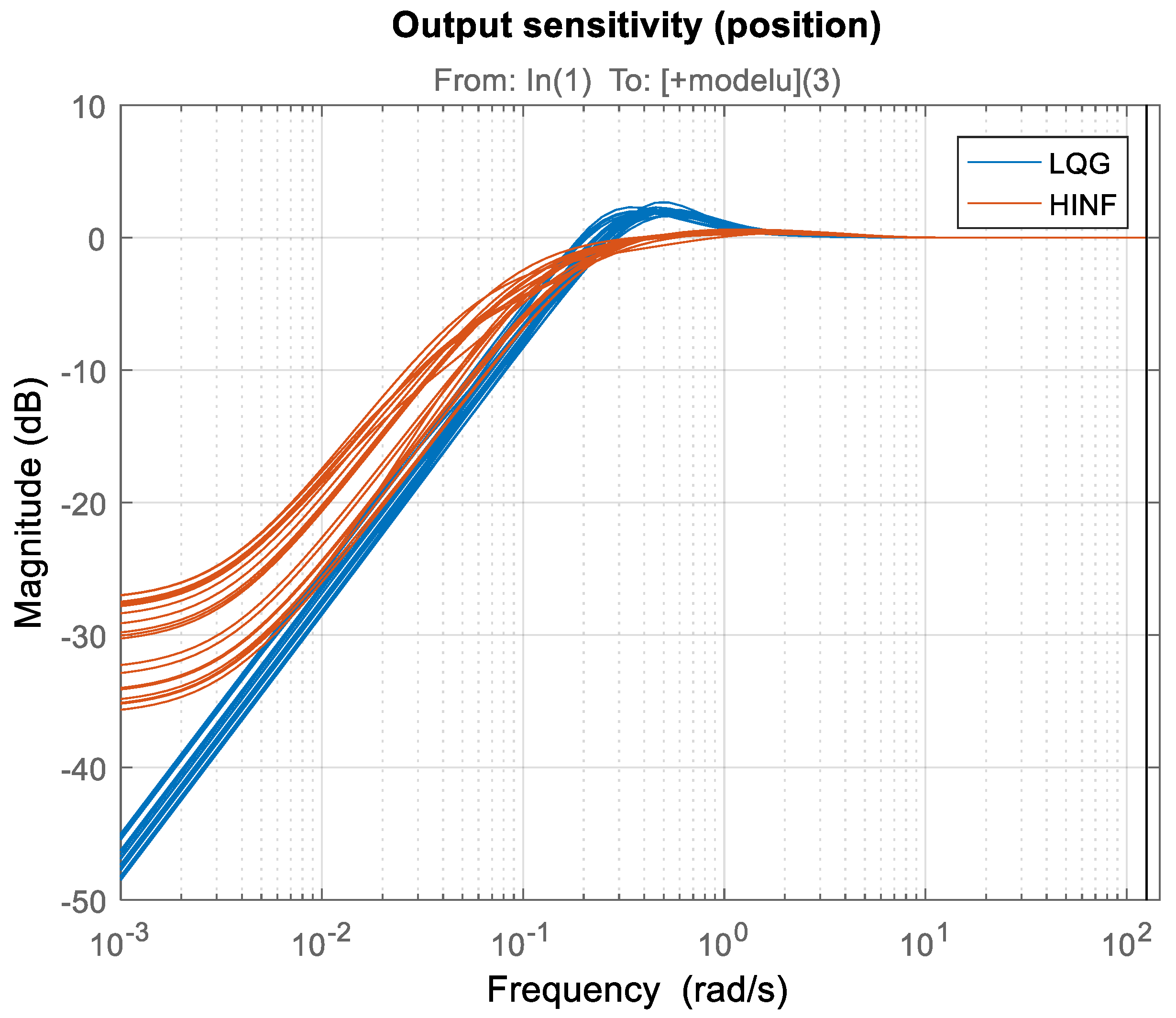
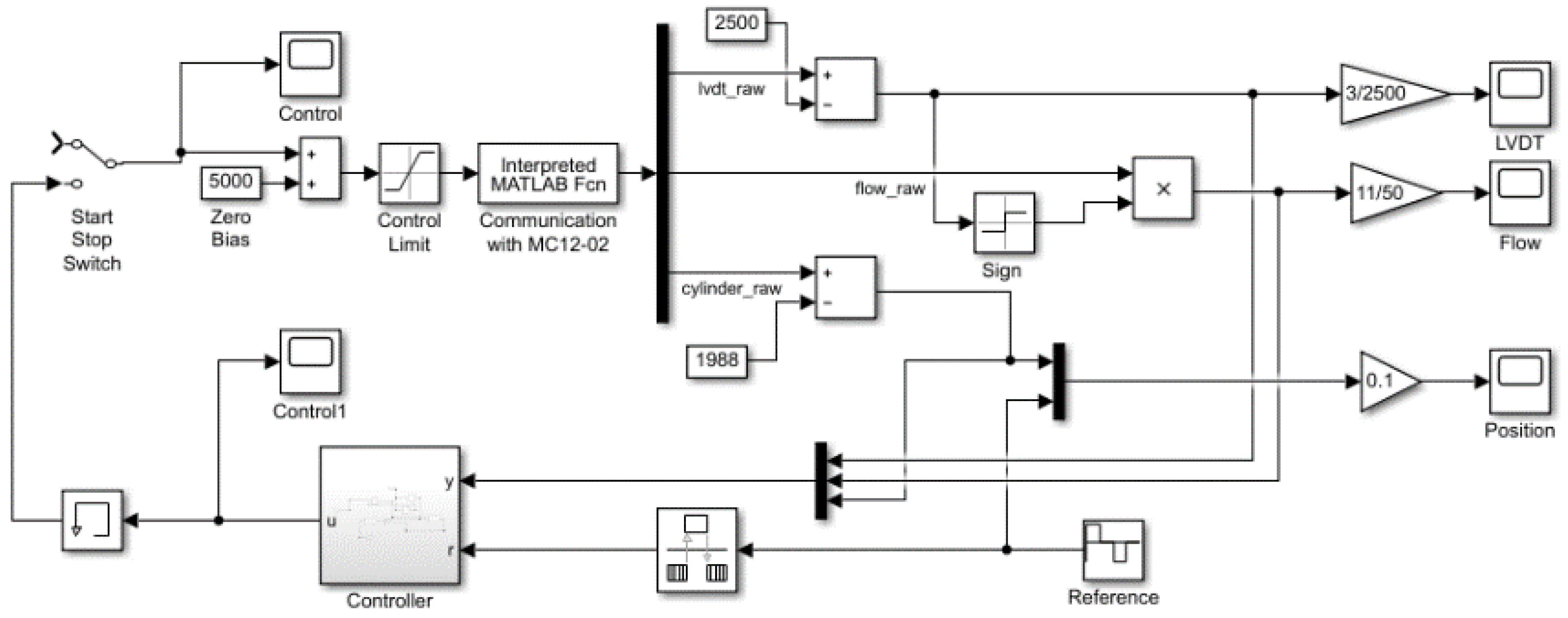
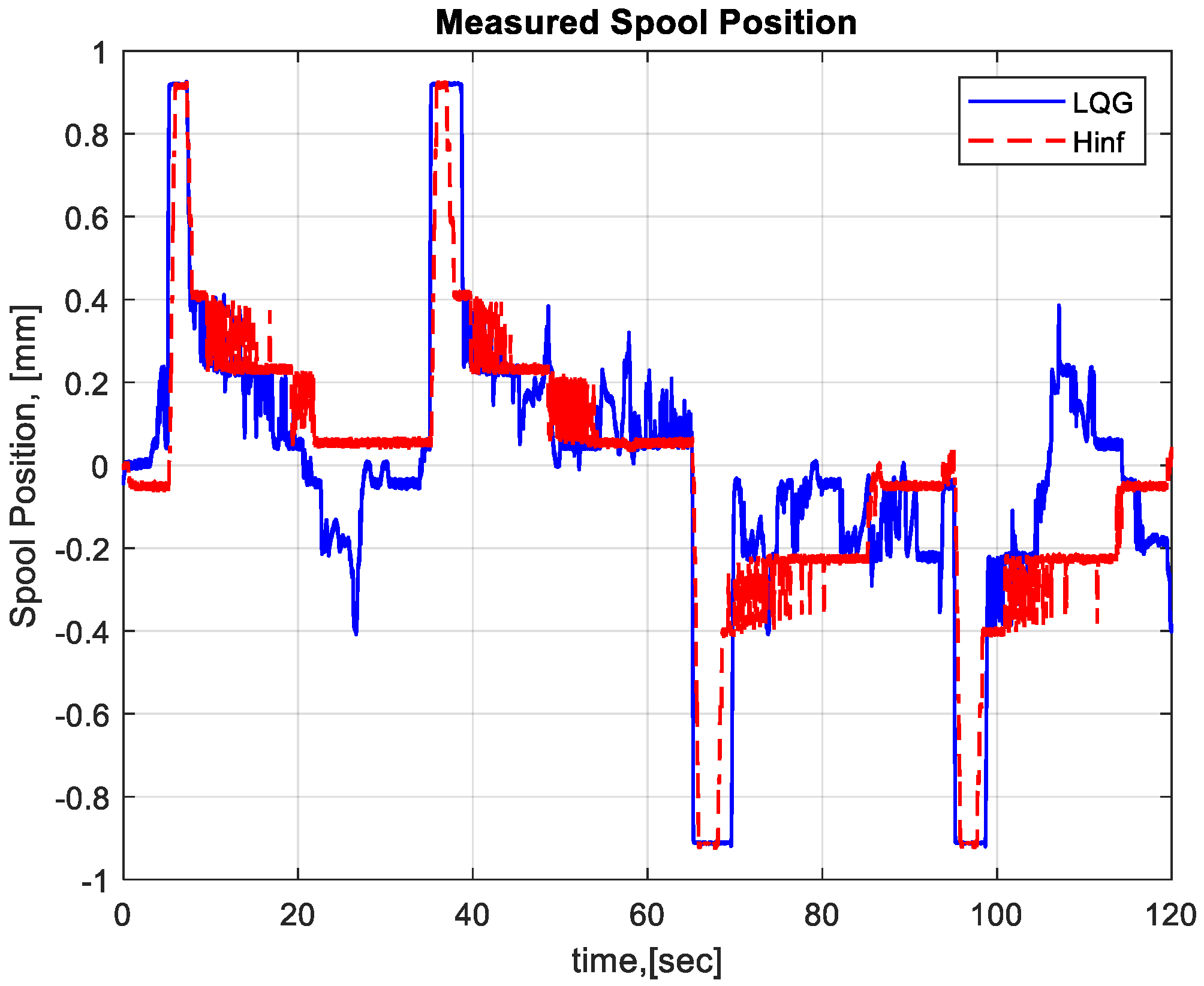
6. Experimental Results for Performance Verification
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Milić, V.; Šitum, Ž.; Essert, M. Robust H∞ position control synthesis of an electro-hydraulic servo system. ISA Trans. 2010, 49, 535–542. [Google Scholar] [CrossRef] [PubMed]
- Proca, A.; Keyhani, A. Identification of Power Steering System Dynamic Models. Mechatronics 1998, 8, 255–270. [Google Scholar] [CrossRef]
- Más, F.; Zhang, Q.; Hansen, A.C. Mechatronics and Intelligent Systems for Off-Road Vehicles; Springer: London, UK, 2010. [Google Scholar]
- Qiu, H.; Zhang, Q. Feedforward-plus-proportional-integral-derivative controller for an off-road vehicle electrohydraulic steering system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 2003, 375–382. [Google Scholar] [CrossRef]
- Atherton, D.P.; Majhi, S. Limitations of PID Controllers. In Proceedings of the 1999 American Control Conference, San Diego, CA, USA, 2–4 June 1999; Volume 6, pp. 3343–3847. [Google Scholar]
- Åström, K.; Hägglund, T. The Future of PID Control. Control Eng. Pract. 2001, 9, 1163–1175. [Google Scholar] [CrossRef]
- Jin, Z.; Zhang, L.; Zhang, J.; Khajepour, A. Stability and optimized H∞ control of tripped and untripped vehicle rollover. Veh. Syst. Dyn. 2016, 54, 1405–1427. [Google Scholar] [CrossRef]
- Wang, C.; Deng, K.; Zhao, W.; Zhou, G.; Zhou, D. Stability control of steer by wire system based on μ synthesis robust control. Sci. China Technol. Sci. 2017, 60, 16–26. [Google Scholar] [CrossRef]
- Min, Y.; Quan, W.; Shengjie, J. Robust H2/H∞ Control for the Electrohydraulic Steering System of a Four-Wheel Vehicle. Math. Probl. Eng. 2014, 4, 1–12. [Google Scholar]
- Zhao, W.; Li, Y.; Wang, C.; Zhao, T.; Gu, X. H∞ control of novel active steering integrated with electric power steering function. J. Cent. South Univ. 2013, 20, 2151–2157. [Google Scholar] [CrossRef]
- Dannöhl, C.; Müller, S.; Ulbrich, H. H∞-control of a rack-assisted electric power steering system. Int. J. Veh. Mech. Mobil. 2012, 50, 527–544. [Google Scholar] [CrossRef]
- Petkov, P.; Slavov, T.S.; Kralev, J. Design of Embedded Robust Control Systems Using MATLAB®/Simulink®; The Institution of Engineering and Technology: London, UK, 2018. [Google Scholar]
- Mitov, A.L.; Kralev, J.; Slavov, T.S.; Angelov, I.L. Reference Tracking LQG Control of Electrohydraulic Servo System for Mobile Machines. In Proceedings of the 10th IEEE International Conference on Intelligent Systems, Varna, Bulgaria, 26–28 June 2020; pp. 475–480. [Google Scholar]
- Mitov, A.L.; Kralev, J.; Slavov, T.S.; Angelov, I.L. Design of H-infinity Tracking Controller for Application in Autonomous Steering of Mobile Machines. In Proceedings of the 19th International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 20–22 May 2020; pp. 871–876. [Google Scholar]
- Mitov, A.; Slavov, T.; Kralev, J.; Angelov, I. Lecture Notes of the Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering, LNICST. In Robust Stability and Performance Investigation of Electrohydraulic Steering Control System; Springer: Berlin/Heidelberger, Germany, 2021; Volume 382, pp. 386–400. [Google Scholar]
- Danfoss Inc. OSPE Steering Valve. Technical Information. 11068682. November 2016. Available online: https://www.sauerbibus.de/fileadmin/editors/countries/sab/Produkte/Danfoss_Neu/Lenkungskomponenten/OSPE_Steering_Valve_Technical_Information_englisch.pdf (accessed on 25 September 2021).
- Angelov, I.; Mitov, A. Test Bench for Experimental Research and Identification of Electrohydraulic Steering Units. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 225–236. [Google Scholar]
- Mitov, A.L.; Kralev, J.; Slavov, T.S.; Angelov, I.L. SIMO System Identification of Transfer Function Model for Electrohydraulic Power Steering. In Proceedings of the 16th International Conference on Electrical Machines, Drives and Power Systems (ELMA), Sofia, Bulgaria, 6–8 June 2019; pp. 130–135. [Google Scholar]
- Slavov, T.S.; Mitov, A.L.; Kralev, J. Advanced Embedded Control of Electrohydraulic Power Steering System. Cybern. Inf. Technol. 2020, 20, 105–121. [Google Scholar] [CrossRef]
- Mitov, A.L.; Slavov, T.S.; Kralev, J.; Angelov, I.L. Comparison of Robust Stability for Electrohydraulic Steering Control System Based on LQG and H-infinity Controller. In Proceedings of the 42st International Conference on Telecommunications and Signal Processing TSP, Budapest, Hungary, 1–3 July 2019; pp. 712–715. [Google Scholar]
- The Mathworks Inc. Control System Toolbox. In User’s Guide; The Mathworks Inc.: Portola Valley, CA, USA, 2016. [Google Scholar]
- Goodwin, G.; Graebe, S.; Salgado, M. Control System Design; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- The Mathworks Inc. Robust Control Toolbox. In User’s Guide; The Mathworks Inc.: Portola Valley, CA, USA, 2016. [Google Scholar]
- Zhou, K.; Doyle, J. Robust and Optimal Control; Prentice Hall International: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Danfoss Inc. Plus+1 Controllers MC012-020 and 022. Data Sheet, 11077167. September 2013. Available online: https://www.danfoss.com/en/products/dps/electronic-controls/controllers/plus1-controllers/plus1-mc-microcontrollers/#tab-documents (accessed on 25 September 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| dB | dB | rad/s | rad/s | % | % | s | s | mm | mm | |
|---|---|---|---|---|---|---|---|---|---|---|
| LQG | 2.5 | 1.8 | 0.36 | 0.27 | 6.5 | 0.1 | 16.00 | 12.00 | 12.07 | 10.61 |
| 0.5 | 0.3 | 0.2 | 0.1 | 0 | 0 | 30 | 16.4 | 14.79 | 11.12 |
| % | s | mm | |
|---|---|---|---|
| LQG | 0 | 10.00 | 732.5 |
| 0 | 14.4 | 885.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitov, A.; Slavov, T.; Kralev, J. Robustness Analysis of an Electrohydraulic Steering Control System Based on the Estimated Uncertainty Model. Information 2021, 12, 512. https://doi.org/10.3390/info12120512
Mitov A, Slavov T, Kralev J. Robustness Analysis of an Electrohydraulic Steering Control System Based on the Estimated Uncertainty Model. Information. 2021; 12(12):512. https://doi.org/10.3390/info12120512
Chicago/Turabian StyleMitov, Alexander, Tsonyo Slavov, and Jordan Kralev. 2021. "Robustness Analysis of an Electrohydraulic Steering Control System Based on the Estimated Uncertainty Model" Information 12, no. 12: 512. https://doi.org/10.3390/info12120512
APA StyleMitov, A., Slavov, T., & Kralev, J. (2021). Robustness Analysis of an Electrohydraulic Steering Control System Based on the Estimated Uncertainty Model. Information, 12(12), 512. https://doi.org/10.3390/info12120512