The Effects of a Predictive HMI and Different Transition Frequencies on Acceptance, Workload, Usability, and Gaze Behavior during Urban Automated Driving

Abstract
1. Introduction
1.1. Background
1.2. Aims and Objectives
- What are the effects of different RtI frequencies on workload, acceptance, usability, trust, and subjective time use in urban automated driving?
- Can potential negative effects of a less capable car automation be mitigated by a predictive HMI?
- What are the effects of different RtI frequencies and a predictive HMI on NDRA engagement?
2. Materials and Methods
2.1. Driving Simulation and Automated Driving System
2.2. Study Design and Procedure
2.3. Test Track and System Limits
2.4. Human–Machine Interfaces
2.5. Dependent Variables
2.6. Sample Characteristics
3. Results
3.1. Acceptance, Usability, Trust, and Subjective Use of Travel Time
3.2. Workload
3.3. NDRA Engagement
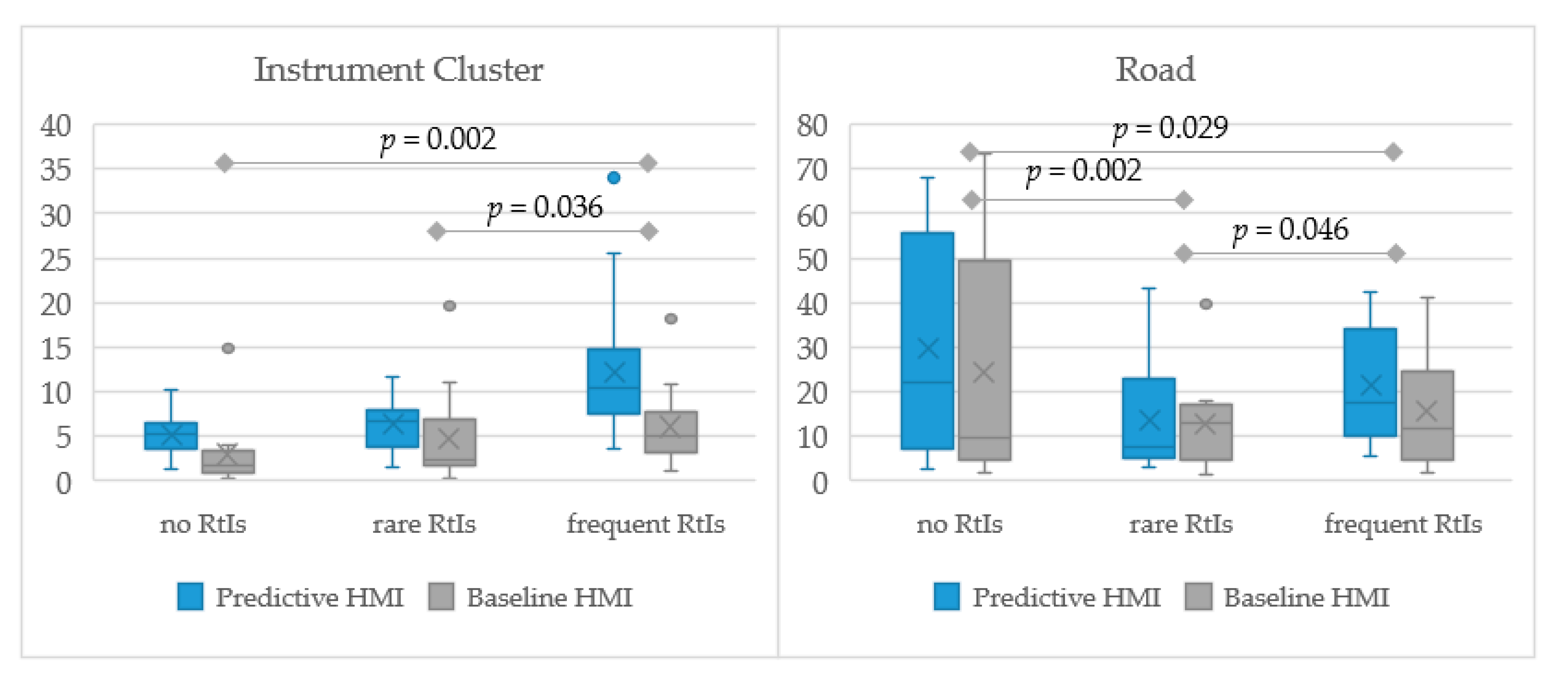
3.4. Eye-Tracking Data
3.5. Post-Study Questionnaire
4. Discussion and Future Work
4.1. HMI Concepts
4.2. Transition Frequency
4.3. Limitations and Future Research
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tesla. Future of Driving. Available online: https://www.tesla.com/autopilot?redirect=no (accessed on 19 November 2019).
- On-Road Automated Driving Committee. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2018. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 30 January 2020).
- Naujoks, F.; Wiedemann, K.; Schoemig, N. The Importance of Interruption Management for Usefulness and Acceptance of Automated Driving. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Oldenburg, Germany, 24–27 September 2017; pp. 254–263. [Google Scholar]
- Huemer, A.K.; Vollrath, M. Ablenkung durch fahrfremde Tätigkeiten: Machbarkeitsstudie. Bericht zum Forschungsprojekt FE 82.376/2009. Mensch und Sicherheit. 2012, M 225, 7–92. [Google Scholar]
- König, M.; Neumayr, L. Users’ resistance towards radical innovations: The case of the self-driving car. Transp. Res. Part F Traff. Psychol. Behav. 2017, 44, 42–52. [Google Scholar] [CrossRef]
- AutoScout24 GmbH. Unser Auto von morgen 2011. Studie zu den Wünschen der Deutschen an das Auto von morgen. 2011. Available online: http://about.autoscout24.com/de-de/au-press/2011_as24_studie_auto_v_morgen.pdf (accessed on 30 January 2020).
- Susilo, Y.O.; Lyons, G.; Jain, J.; Atkins, S. Rail Passengers’ Time Use and Utility Assessment. Transp. Res. Rec. 2013, 2323, 99–109. [Google Scholar] [CrossRef]
- Llaneras, R.E.; Salinger, J.; Green, C.A. Human Factors Issues Associated with Limited Ability Autonomous Driving Systems: Drivers’ Allocation of Visual Attention to the Forward Roadway. In Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design 2013. Driving Assessment Conference, Bolton Landing, NY, USA, 17–20 June 2013; pp. 92–98. [Google Scholar]
- Naujoks, F.; Purucker, C.; Neukum, A. Secondary task engagement and vehicle automation–Comparing the effects of different automation levels in an on-road experiment. Transp. Res. Part F Traff. Psychol. Behav. 2016, 38, 67–82. [Google Scholar] [CrossRef]
- Feldhütter, A.; Hecht, T.; Kalb, L.; Bengler, K. Effect of prolonged periods of conditionally automated driving on the development of fatigue: With and without non-driving-related activities. Cogn. Tech. Work. 2018, 21, 33–40. [Google Scholar] [CrossRef]
- Zeeb, K.; Buchner, A.; Schrauf, M. What determines the take-over time? An integrated model approach of driver take-over after automated driving. Accid. Anal. Prev. 2015, 78, 212–221. [Google Scholar] [CrossRef]
- Holländer, K.; Pfleging, B. Preparing Drivers for Planned Control Transitions in Automated Cars. In Proceedings of the 17th International Conference on Mobile and Ubiquitous Multimedia, Cairo, Egypt, 25–28 November 2018. [Google Scholar]
- Naujoks, F.; Forster, Y.; Wiedemann, K.; Neukum, A. A human-machine interface for cooperative highly automated driving. In Advances in Human Aspects of Transportation; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Richardson, N.T.; Flohr, L.; Michel, B. Takeover Requests in Highly Automated Truck Driving: How Do the Amount and Type of Additional Information Influence the Driver–Automation Interaction? MTI 2018, 2, 68. [Google Scholar] [CrossRef]
- Wandtner, B.; Schömig, N.; Schmidt, G. Secondary task engagement and disengagement in the context of highly automated driving. Transp. Res. Part F Traff. Psychol. Behav. 2018, 58, 253–263. [Google Scholar] [CrossRef]
- Naujoks, F.; Befelein, D.; Wiedemann, K.; Neukum, A. A review of non-driving-related tasks used in studies on automated driving. In Proceedings of the 8th Conference on Applied Human Factors and Ergonomics (AHFE). 8th Conference on Applied Human Factors and Ergonomics, Los Angeles, CA, USA, 17–21 July 2017; pp. 525–537. [Google Scholar]
- Pfleging, B.; Rang, M.; Broy, N. Investigating user needs for non-driving-related activities during automated driving. In Proceedings of the 15th International Conference on Mobile and Ubiquitous Multimedia (MUM), Rovaniemi, Finland, 12–15 December 2016; pp. 91–99. [Google Scholar]
- Sommer, K. Continental Mobilitätsstudie. Available online: http://www.contionline.com/generator/www/com/de/continental/presseportal/allgemein/elekt romobilitaet/workshop_2011_12_15/download/studie_de.pdf (accessed on 30 January 2020).
- Thalys. Umfrage im Auftrag von Thalys: Wie reisen Europäer? Studie unter europäischen Reisenden zeigt länderspezifische Unterschiede und Gemeinsamkeiten im Reiseverhalten. Köln, 2013. Available online: https://docplayer.org/39039121-Umfrage-im-auftrag-von-thalys-wie-reisen-europaeer.html (accessed on 30 January 2020).
- Metz, B.; Landau, A.; Just, M. Frequency of secondary tasks in driving–Results from naturalistic driving data. Saf. Sci. 2014, 68, 195–203. [Google Scholar] [CrossRef]
- Large, D.; Burnett, G.; Morris, A.; Muthumani, A.; Matthias, R. Design Implications of Drivers’ Engagement with Secondary Activities During Highly-Automated Driving – A Longitudinal Simulator Study. In Proceedings of the Road Safety and Simulation International Conference (RSS) 2017. Road Safety and Simulation International Conference (RSS), The Hague, Netherlands, 17–19 October 2017; pp. 1–10. [Google Scholar]
- Hecht, T.; Feldhütter, A.; Draeger, K.; Bengler, K. What do you do? An analysis of non-driving related activities during a 60 minutes conditionally automated highway drive. In Proceedings of the 2019 International Conference on Human Interaction and Emerging Technologies IHIET 2019, Nice, France, 22–24 August 2019. [Google Scholar]
- Hecht, T.; Darlagiannis, E.; Bengler, K. Non-driving Related Activities in Automated Driving–An Online Survey Investigating User Needs. In International Conference on Human Systems Engineering and Design: Future Trends and Applications; Springer: Cham, Switzerland, 2019; Volume 1026, pp. 182–188. [Google Scholar]
- Andreassi, S. Patience is a virtue: Waiting for fully autonomous vehicles to hit the road. Available online: https://www.embedded-computing.com/embedded-computing-design/patience-is-a-virtue-waiting-for-fully-autonomous-vehicles-to-hit-the-road# (accessed on 19 November 2019).
- Lv, C.; Cao, D.; Zhao, Y.; Auger, D.J.; Sullman, M.; Wang, H.; Dutka, L.M.; Skrypchuk, L.; Mouzakitis, A. Analysis of autopilot disengagements occurring during autonomous vehicle testing. IEEE/CAA J. Autom. Sinica. 2018, 5, 58–68. [Google Scholar] [CrossRef]
- Janssen, C.P.; Iqbal, S.T.; Kun, A.L.; Donker, S.F. Interrupted by my car? Implications of interruption and interleaving research for automated vehicles. Int. J. Hum. Comput. Stud. 2019, 130, 221–233. [Google Scholar] [CrossRef]
- Altmann, E.M.; Trafton, J.G. Task Interruption. Resumption Lag and the Role of Cues. 2004. Available online: http://www.dtic.mil/dtic/tr/fulltext/u2/a480333.pdf (accessed on 30 January 2020).
- Edwards, M.B.; Gronlund, S.D. Task interruption and its effects on memory. Mem. 1998, 6, 665–687. [Google Scholar] [CrossRef] [PubMed]
- Bailey, B.P.; Konstan, J.A. On the need for attention-aware systems: Measuring effects of interruption on task performance, error rate, and affective state. Comput. Human. Behav. 2006, 22, 685–708. [Google Scholar] [CrossRef]
- Speier, C.; Valacich, J.S.; Vessey, I. The Influence of Task Interruption on Individual Decision Making: An Information Overload Perspective. Decis. Sci. 1999, 30, 337–360. [Google Scholar] [CrossRef]
- Weigl, M.; Müller, A.; Vincent, C.; Angerer, P.; Sevdalis, N. The association of workflow interruptions and hospital doctors’ workload: A prospective observational study. BMJ Qual. Saf. 2012, 21, 399–407. [Google Scholar] [CrossRef]
- Heath, C.; Larrick, R.P.; Wu, G. Goals as reference points. Cogn. Psychol. 1999, 38, 79–109. [Google Scholar] [CrossRef]
- Muraven, M.; Tice, D.M.; Baumeister, R.F. Self-control as a limited resource: Regulatory depletion patterns. J. Pers. Soc. Psychol. 1998, 74, 774. [Google Scholar] [CrossRef]
- Trafton, J.G.; Altmann, E.M.; Brock, D.P.; Mintz, F.E. Preparing to resume an interrupted task: Effects of prospective goal encoding and retrospective rehearsal. Int. J. Hum. Comput. Stud. 2003, 58, 583–603. [Google Scholar] [CrossRef]
- Monk, C.A.; Trafton, J.G.; Boehm-Davis, D.A. The effect of interruption duration and demand on resuming suspended goals. J. Exp. Psychol. Appl. 2008, 14, 299–313. [Google Scholar] [CrossRef]
- Schömig, N.; Metz, B. Three levels of situation awareness in driving with secondary tasks. Saf. Sci. 2013, 56, 44–51. [Google Scholar] [CrossRef]
- Beggiato, M.; Hartwich, F.; Schleinitz, K.; Krems, J.; Othersen, I.; Petermann-Stock, I. What would drivers like to know during automated driving? Information needs at different levels of automation. 7. Tagung Fahrerassistenzsysteme. 2015. Available online: https://mediatum.ub.tum.de/doc/1285216/file.pdf (accessed on 30 January 2020).
- Danner, S.; Pfromm, M.; Limbacher, R.; Bengler, K. Information needs regarding the purposeful activation of automated driving functions—an exploratory study. Available online: https://www.researchgate.net/profile/Simon_Danner5/publication/338712235_Information_needs_regarding_the_purposeful_activation_of_automated_driving_functions-an_exploratory_study/links/5e26d10ea6fdcc38d24e09a7/Information-needs-regarding-the-purposeful-activation-of-automated-driving-functions-an-exploratory-study.pdf (accessed on 30 January 2020).
- Körber, M.; Prasch, L.; Bengler, K. Why Do I Have to Drive Now? Post Hoc Explanations of Takeover Requests. Hum. Factors 2018, 60, 305–323. [Google Scholar] [CrossRef] [PubMed]
- Feierle, A.; Bücherl, F.; Hecht, T.; Bengler, K. Evaluation of Display Concepts for the Instrument Cluster in Urban Automated Driving. In Proceedings of the International Conference on Human Systems Engineering and Design: Future Trends and Applications, Munich, Germany, 16–18 September 2019. [Google Scholar]
- Brooke, J. SUS - A quick and dirty usability scale. Usability Eval. Ind. 1998, 189, 4–7. [Google Scholar]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. In Advances in Psychology; north-holland publishing company: Amsterdam, The Netherlands, 1988. [Google Scholar]
- van der Laan, J.D.; Heino, A.; de Waard, D. A simple procedure for the assessment of acceptance of advanced transport telematics. Transp. Res. Part C Emerg. Technol. 1997, 5, 1–10. [Google Scholar] [CrossRef]
- Harwell, M.R.; Rubinstein, E.N.; Hayes, W.S.; Olds, C.C. Summarizing Monte Carlo Results in Methodological Research: The One- and Two-Factor Fixed Effects ANOVA Cases. J. Educ. Stat. 2016, 17, 315–339. [Google Scholar] [CrossRef]
- EN ISO 15007-1:2014: Road vehicles - Measurement of driver visual behaviour with respect to transport information and control systems - Part 1: Definitions and parameters; Beuth Verlag GmbH: Berlin, Germany, 2015; Available online: https://www.iso.org/ru/standard/56621.html (accessed on 30 January 2020).
- Hergeth, S.; Lorenz, L.; Vilimek, R.; Krems, J.F. Keep Your Scanners Peeled: Gaze Behavior as a Measure of Automation Trust During Highly Automated Driving. Hum. Factors 2016, 58, 509–519. [Google Scholar] [CrossRef]
- Stapel, J.; Mullakkal-Babu, F.; Happee, R. Driver Behavior and Workload in an On-road Automated Vehicle. In Proceedings of the Road Safety and Simulation International Conference (RSS) 2017, Road Safety and Simulation International Conference (RSS), The Hague, The Netherlands, 17–19 October 2017. [Google Scholar]
- Bohrmann, D.; Bengler, K. Reclined Posture for Enabling Autonomous Driving. In Human Systems Engineering and Design II; Ahram, T., Karwowski, W., Pickl, S., Taiar, R., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 169–175. ISBN 978-3-030-27928-8. [Google Scholar]
- Kindelsberger, J.; Fridman, L.; Glazer, M.; Reimer, B. Designing Toward Minimalism in Vehicle HMI. arXiv 2018, arXiv:1805.02787. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Database | Variable | Data Collection |
|---|---|---|
| Subjective data | Usability | System Usability Scale (SUS) |
| Workload | NASA-RTLX | |
| Acceptance | Van der Laan Acceptance Questionnaire | |
| Trust | Single-Item (7 Likert) | |
| Use of travel time | Single-Item (7 Likert) | |
| Objective data | Attention Ratio Monitoring Ratio | Remote eye-tracking system (Dikablis) Remote eye-tracking system (Dikablis) |
| Behavior | NDRA participation rate | GoPro camera |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hecht, T.; Kratzert, S.; Bengler, K. The Effects of a Predictive HMI and Different Transition Frequencies on Acceptance, Workload, Usability, and Gaze Behavior during Urban Automated Driving. Information 2020, 11, 73. https://doi.org/10.3390/info11020073
Hecht T, Kratzert S, Bengler K. The Effects of a Predictive HMI and Different Transition Frequencies on Acceptance, Workload, Usability, and Gaze Behavior during Urban Automated Driving. Information. 2020; 11(2):73. https://doi.org/10.3390/info11020073
Chicago/Turabian StyleHecht, Tobias, Stefan Kratzert, and Klaus Bengler. 2020. "The Effects of a Predictive HMI and Different Transition Frequencies on Acceptance, Workload, Usability, and Gaze Behavior during Urban Automated Driving" Information 11, no. 2: 73. https://doi.org/10.3390/info11020073
APA StyleHecht, T., Kratzert, S., & Bengler, K. (2020). The Effects of a Predictive HMI and Different Transition Frequencies on Acceptance, Workload, Usability, and Gaze Behavior during Urban Automated Driving. Information, 11(2), 73. https://doi.org/10.3390/info11020073