An Accurate GNSS-Based Redundant Safe Braking System for Urban Elevated Rail Maglev Trains


 , and
, and
Abstract
:1. Introduction
2. Related Work
3. Redundant Autonomous Safe Braking System
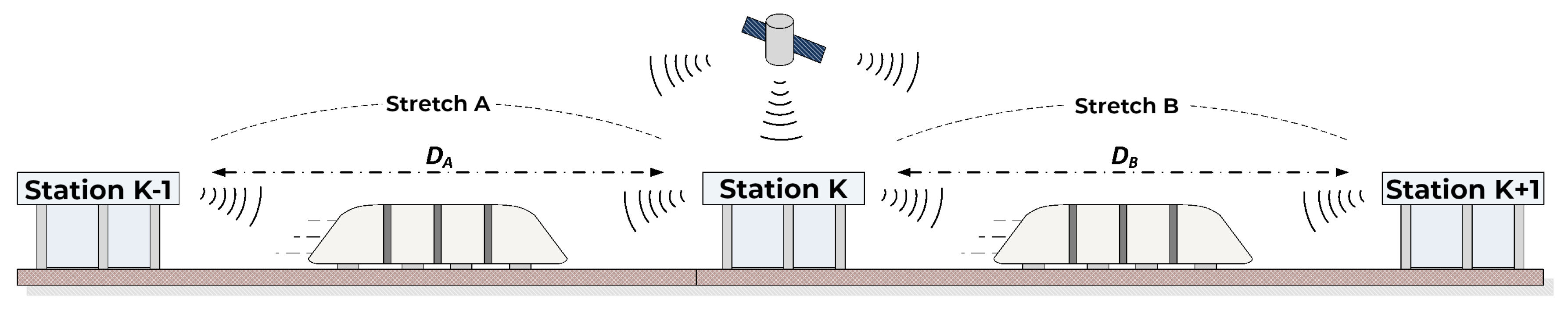
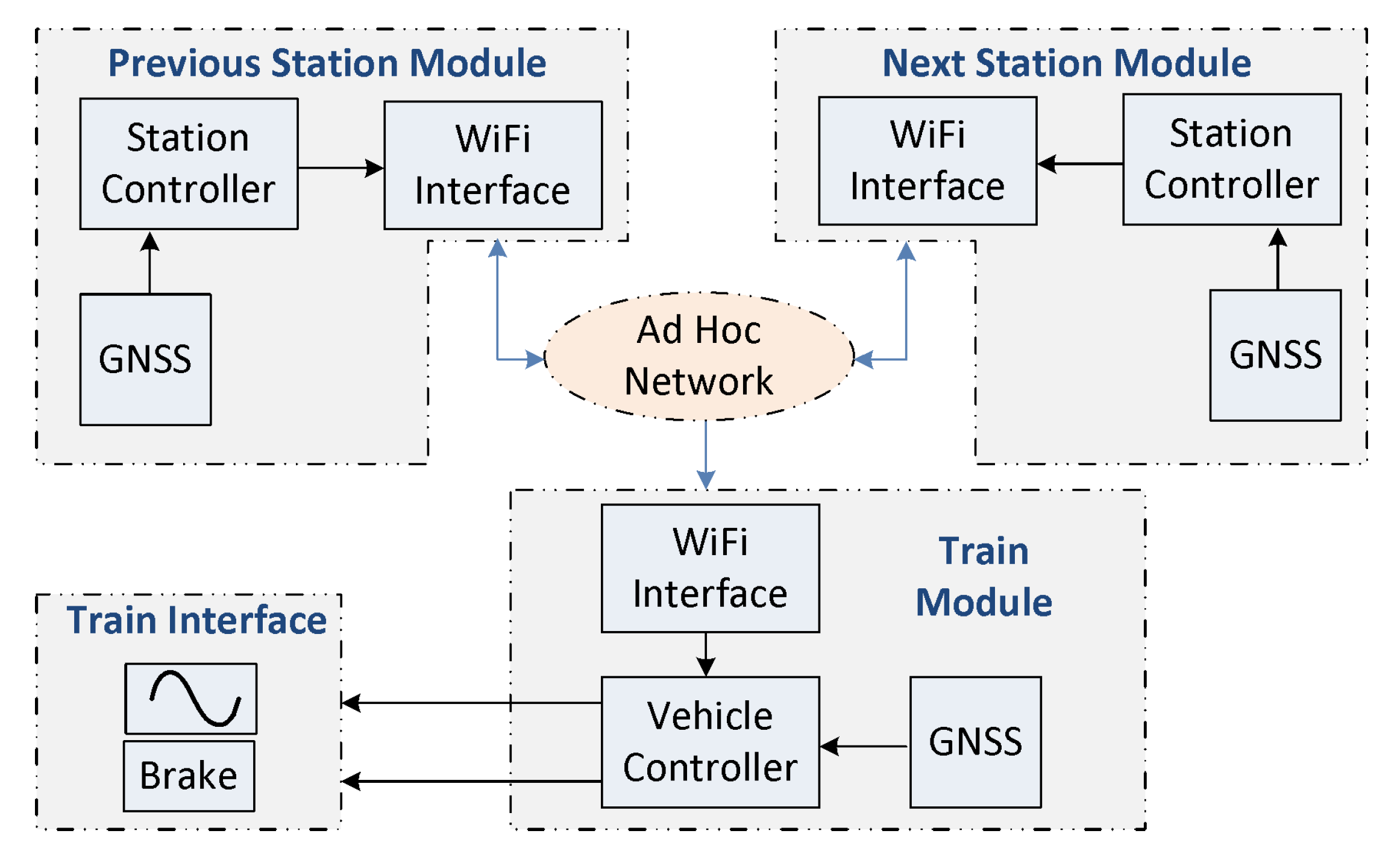
3.1. System Description
3.2. RASBS Positioning Design
3.3. Determination
3.4. Hardware Description
4. RASBS Operation
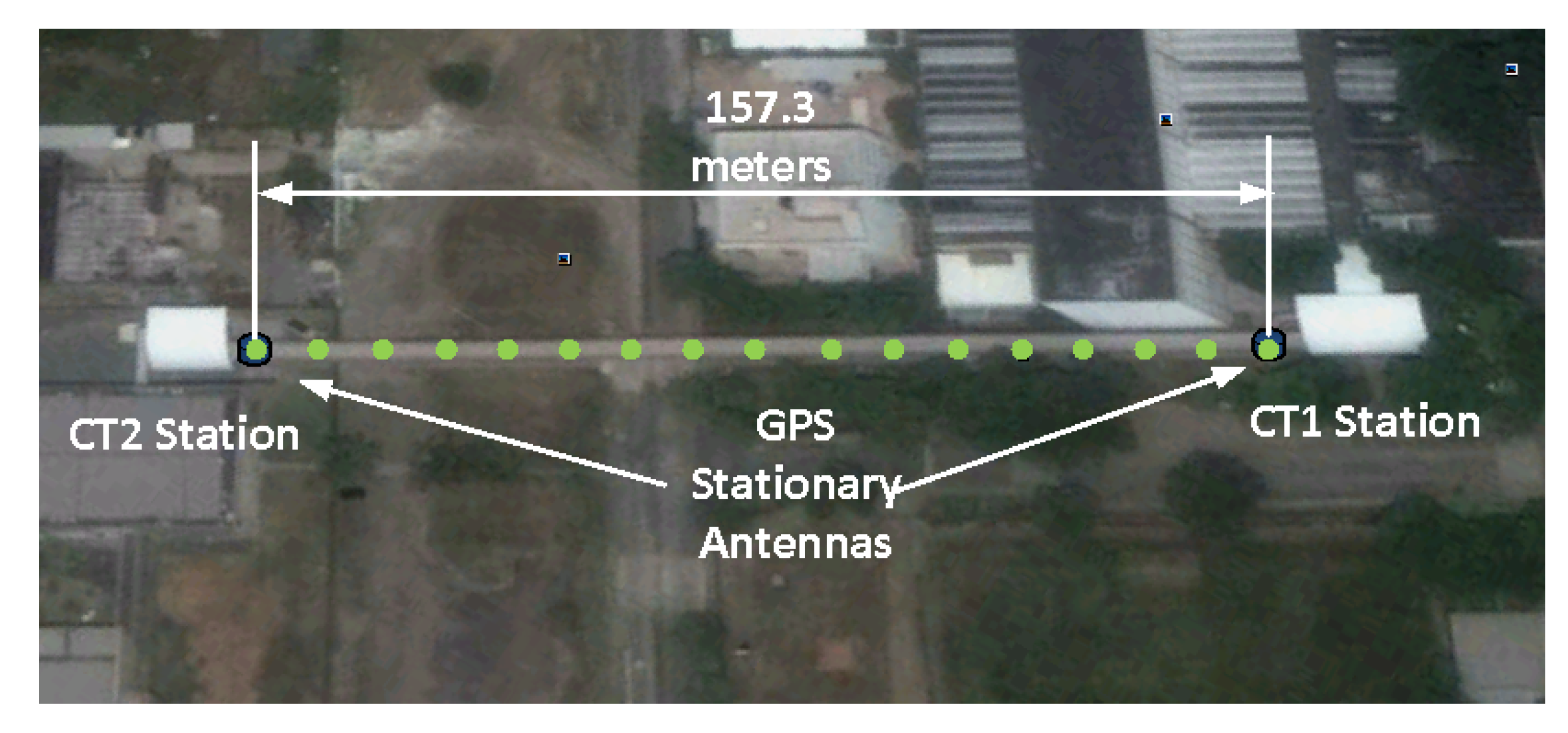
4.1. CT1 Controller Description
- Latitude—latitude of CT1 station, in decimal degrees;
- Longitude—longitude of CT1 station, in decimal degrees;
- Time—UTC time provided by GPS satellite, given in the format HH:MM:SS;
- PDOP— Position Dilution Of Precision, provided by GPS receiver;
- HDOP—Horizontal Dilution Of Precision, provided by the GPS receiver.
4.2. CT2 Controller Description
| Algorithm 1:CT2 Module Procedure. |
 |
4.3. Vehicle Controller Description
| Algorithm 2:Vehicle Module Procedure. |
 |
| Algorithm 3:GPS update rate error correction. |
 |
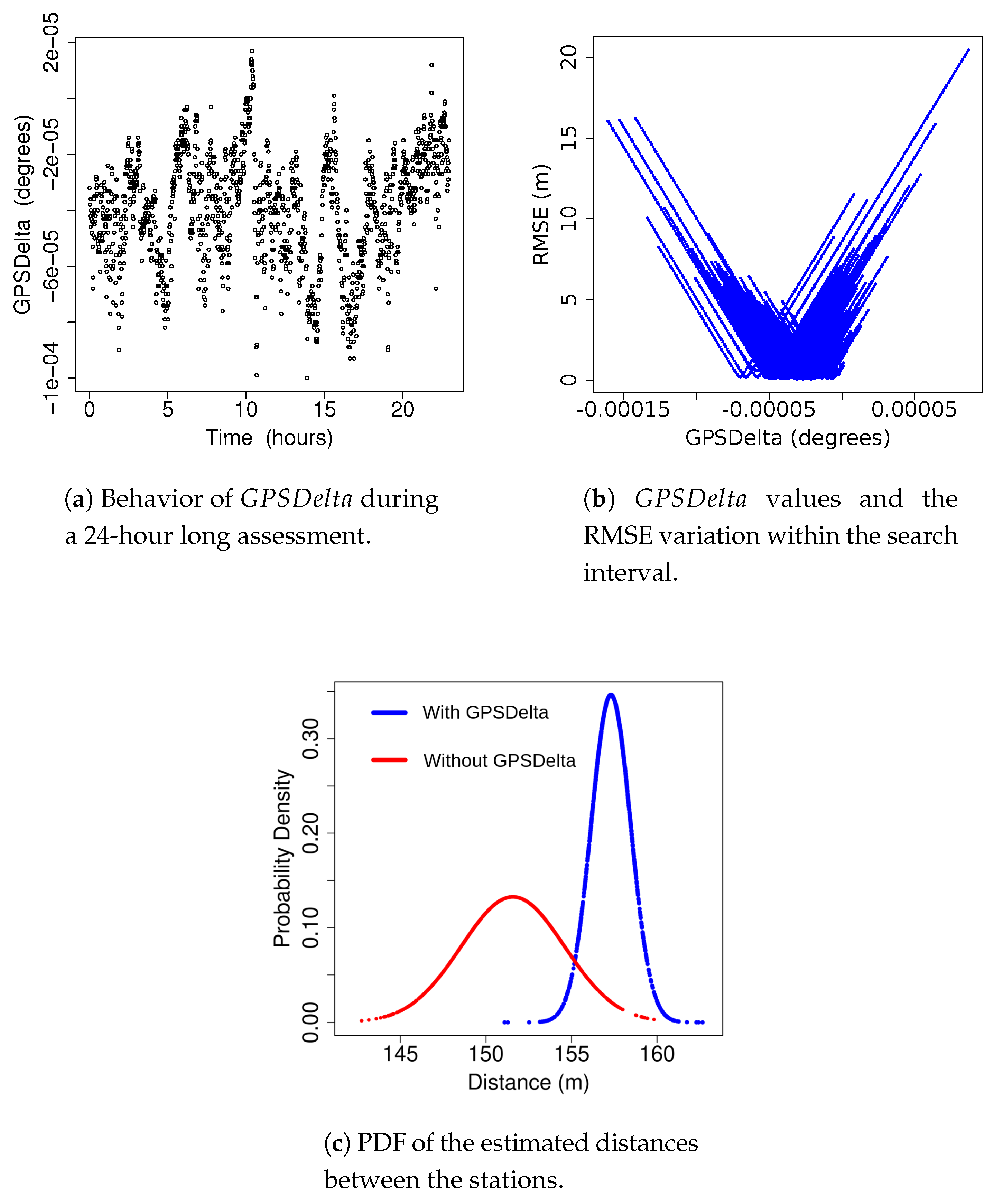
5. Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shladover, S.E. Connected and automated vehicle systems: Introduction and overview. J. Intell. Transp. Syst. 2018, 22, 190–200. [Google Scholar] [CrossRef]
- Shafiq, Z.; Khan, L.U.; Mahmud, S.A.; Khan, G.M. Context-Aware Cooperative Collision Avoidance Vehicle Braking Alert System for VANET. In Proceedings of the 3rd International Conference on Context-Aware Systems and Applications, Dubai, UAE, 15–16 October 2014; pp. 92–96. [Google Scholar]
- Lin, C.F.; Juang, J.C.; Li, K.R. Active collision avoidance system for steering control of autonomous vehicles. IET Intell. Transp. Syst. 2014, 8, 550–557. [Google Scholar] [CrossRef]
- Summerfield, C.; Greig, D. Precise positioning services in the rail sector. In Technical Report, Department of Innovation, Industry, Climate Change Science, Research and Tertiary Education; ACIL Allen Consulting: Melbourne, Australia, 2013. [Google Scholar]
- Kim, K.; Seol, S.; Kong, S.H. High-speed train navigation system based on multi-sensor data fusion and map matching algorithm. Int. J. Control Autom. Syst. 2015, 13, 503–512. [Google Scholar] [CrossRef]
- Sotelo, G.G.; de Andrade, R.; Dias, D.H.N.; Ferreira, A.C.; Costa, F.; Machado, O.J.; de Oliveira, R.A.H.; Santos, M.D.A.; Stephan, R.M. Tests With One Module of the Brazilian Maglev-Cobra Vehicle. IEEE Trans. Appl. Supercond. 2013, 23, 3601204. [Google Scholar] [CrossRef]
- de Oliveira, R.A.H.; Berger, D.; Schultz, L.; Stephan, R.M.; Ferreira, A.C. Finite element analysis of the forces developed on linear induction motors. In Proceedings of the IEEE 13th Brazilian Power Electronics Conference and 1st Southern Power Electronics Conference (COBEP/SPEC), Fortaleza, Brazil, 29 November–2 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Yamamoto, H.; Sasaki, T.; Sugahara, H. Application of GPS to Train Control Systems for Secondary Lines. Q. Rep. RTRI 2010, 51, 196–204. [Google Scholar] [CrossRef]
- Liu, J.; Tang, T.; Gai, B.; Wang, J.; Chen, D. Integrity assurance of GNSS-based train integrated positioning system. Sci. China Technol. Sci. 2011, 54, 1779–1792. [Google Scholar] [CrossRef]
- Roth, J.; Schaich, T.; Trommer, G.F. Cooperative GNSS-based method for vehicle positioning. Gyroscopy Navig. 2012, 3, 245–254. [Google Scholar] [CrossRef]
- Williams, T.; Alves, P.; Lachapelle, G.; Basnayake, C. Evaluation of GPS-based methods of relative positioning for automotive safety applications. Transp. Res. Part C Emerg. Technol. 2012, 23, 98–108. [Google Scholar] [CrossRef]
- Ivis, F. Calculating Geographic Distance: Concepts and Methods. Available online: https://www.lexjansen.com/nesug/nesug06/dm/da15.pdf (accessed on 15 November 2020).
- Bensky, A. Wireless Positioning Technologies and Applications; Artech House, Inc.: Norwood, MA, USA, 2007. [Google Scholar]
- SiRF Technology, Inc. NMEA Reference Manual. Available online: http://www.sirf.com (accessed on 3 November 2019).
- Trivedi, K. Probability and Statistics with Reliability, Queuing, and Computer Science Applications, 2nd ed.; Wiley: Hoboken, NJ, USA, 2001. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Description |
|---|---|
| GNSS Receiver | U-Blox EVK-7P kit |
| WiFi Interface | TP-LINK TL-WN722N |
| Controllers | Raspberry Pi Model B+ v1.2 |
| Distance CT1–CT2 | Mean | SD | 95% C.I. |
|---|---|---|---|
| Without GPSDelta | 151.13 | 3.15 | 6.18 |
| With GPSDelta | 157.31 | 1.24 | 2.43 |
| Direction | Mean | SD | 99% C.I. |
|---|---|---|---|
| CT1 to CT2 | 18.81 | 0.16 | 0.47 |
| CT2 to CT1 | 62.26 | 0.19 | 0.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neto, J.B.P.; Gomes, L.d.C.; Campista, M.E.M.; Costa, L.H.M.K. An Accurate GNSS-Based Redundant Safe Braking System for Urban Elevated Rail Maglev Trains. Information 2020, 11, 531. https://doi.org/10.3390/info11110531
Neto JBP, Gomes LdC, Campista MEM, Costa LHMK. An Accurate GNSS-Based Redundant Safe Braking System for Urban Elevated Rail Maglev Trains. Information. 2020; 11(11):531. https://doi.org/10.3390/info11110531
Chicago/Turabian StyleNeto, João Batista Pinto, Lucas de Carvalho Gomes, Miguel Elias Mitre Campista, and Luís Henrique Maciel Kosmalski Costa. 2020. "An Accurate GNSS-Based Redundant Safe Braking System for Urban Elevated Rail Maglev Trains" Information 11, no. 11: 531. https://doi.org/10.3390/info11110531
APA StyleNeto, J. B. P., Gomes, L. d. C., Campista, M. E. M., & Costa, L. H. M. K. (2020). An Accurate GNSS-Based Redundant Safe Braking System for Urban Elevated Rail Maglev Trains. Information, 11(11), 531. https://doi.org/10.3390/info11110531