A Heuristic Elastic Particle Swarm Optimization Algorithm for Robot Path Planning


Abstract
:1. Introduction
- (1)
- Using a path planned on a large-scale grid employing the A* algorithm for global guidance, a heuristic elastic particle algorithm, which can overcome the disadvantage that the A* algorithm cannot yield the shortest path, is proposed.
- (2)
- The contraction operation of the elastic particle algorithm yields the globally optimal path, which is composed of locally optimal nodes. This causes the particles to converge rapidly toward the globally optimal path and ensures particle diversity in the iterative process by a rebounding operation. The particle swarm algorithm cannot converge to the globally optimal path, owing to the lack of heuristic information, but the elastic particle algorithm avoids this deficiency successfully.
- (3)
- Based on the global convergence of the A* algorithm and iterative convergence of the PSO algorithm, the path converges to the global optimum while ensuring the real-time performance of the algorithm for robot path planning.
2. A* Algorithm
3. Proposed Algorithm
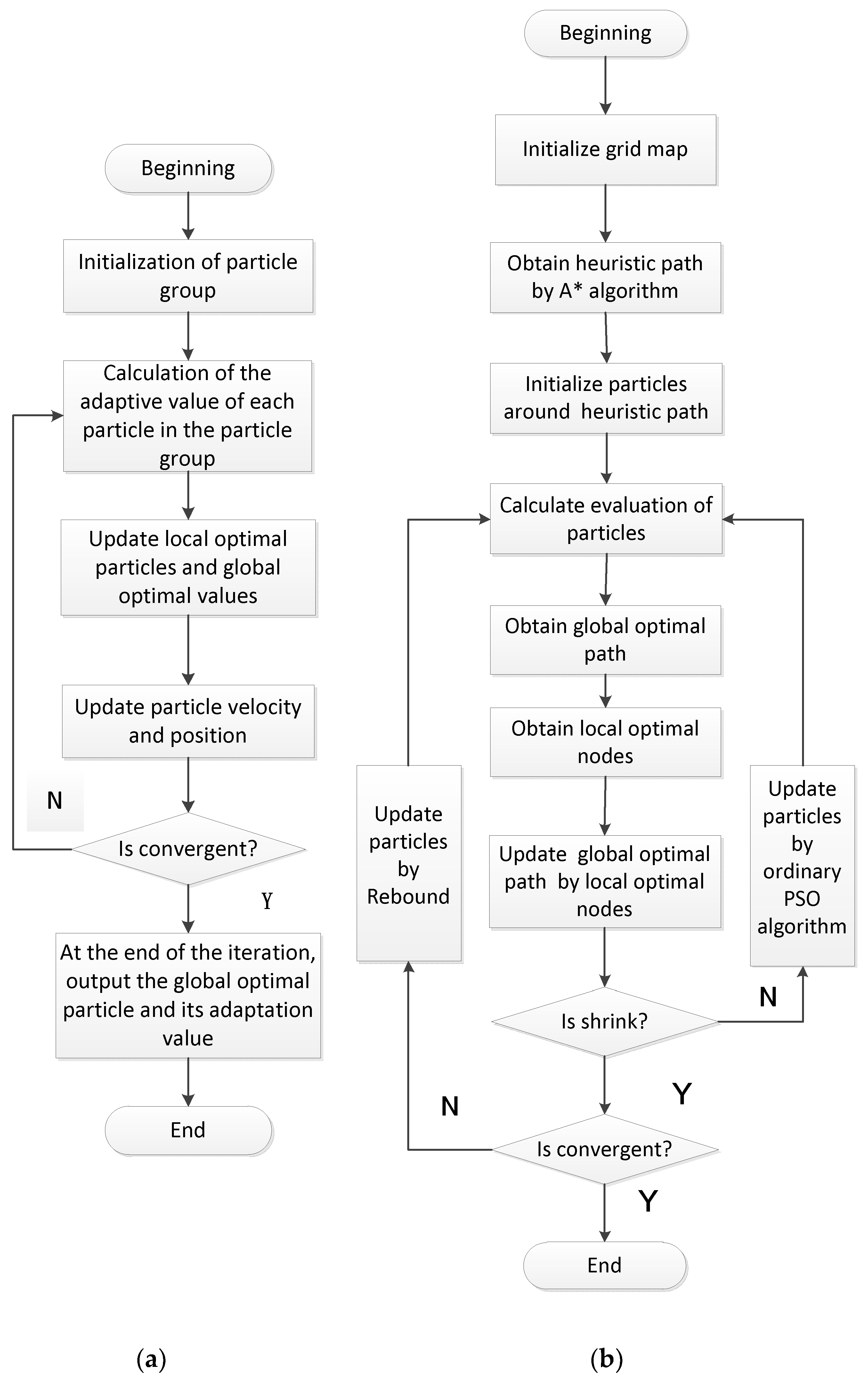
3.1. Standard PSO Algorithm
- Step 1.
- The environment map is built: The environment map is constructed by visual or other methods to obtain the starting position, target position, and obstacle information.
- Step 2.
- The particles are initialized: Parameters of the PSO algorithm are set, as is the initial position and velocity of the particle.
- Step 3.
- The particle fitness is calculated: The fitness function of a particle is the common constraint of the current particle position and its direction of motion along the path length, path hazard coefficient, and current velocity of the particle. The fitness function is defined as , where are the inertia weights of the path length, path hazard coefficient, and current velocity of the particle, respectively.
- Step 4.
- The particle state is updated: The current optimal path is obtained by the particle fitness and the particle state (position and velocity) is updated according to the optimal path.
- Step 5.
- The particle convergence is determined: Based on the convergence threshold, the convergence of the current particle is determined. If it has converged, the path is saved and the iteration is exited. Otherwise, the third step is started again to continue the iteration.
3.2. Elastic PSO Algorithm
3.2.1. Concept Definition
3.2.2. Evaluation Function
3.2.3. Elastic Strategy
3.2.4. EPSO Algorithm
| Algorithm 1: EPSO algorithm |
| 1. START 2. EPSO_INIT(); 3. FOR iterate N 4. CALCULARFITNESS(); 5. Pb=MIN_OF_FITNESS(); 6. FOR all nodes 7. FOR all particles 8. LFit=LOCALFITNESS(); 9. LFitb=LOCALFITNESS_OF_PB(); 10. END FOR 11. LFitmin=MIN_OF_NODEFIT(); 12. Nmin=BEST_LOCAL_NODE; 13. END FOR 14. FOR all nodes of Global Optimal Path Pb 15. IF(LFitmin < LFitb) 16. Nb=Nmin; 17. END IF 18. END FOR 19. FOR all particles 20. Dp=CALCULAR_DIST_TO_BESTPATH(); 21. END FOR 22. Dpmax=MAX_OF_DP(); 23. IF(Dpmax<REBOUND_THRESHOLD) 24. REBOUND_PARTICLE(); 25. ELSE 26. NORMAL_PSO_UPDATE(); 27. END IF 28. END FOR 29. END 30. In this algorithm, the EPSO_INIT() function is used for the EPSO particle initialisation; the CALCULARFITNESS () function is used to obtain the particle fitness. Globally optimal path Pb can be obtained with this function. GET_LOCALNODE() is a function for obtaining the locally optimal node of each path; SHRINK() is a function according to formula (26) and formula (27) used to perform the particle shrinkage operation. CALCU_DIST() can be used to calculate the distance between a particle and the globally optimal path; this distance and rebound threshold REBOUND_THRESHOLD are compared to determine whether to perform rebound operation REBOUND (). NOMAL_UPDATE () is used for the standard PSO particle update function. |
3.3. Heuristic Elastic PSO Algorithm
4. Experimental Result
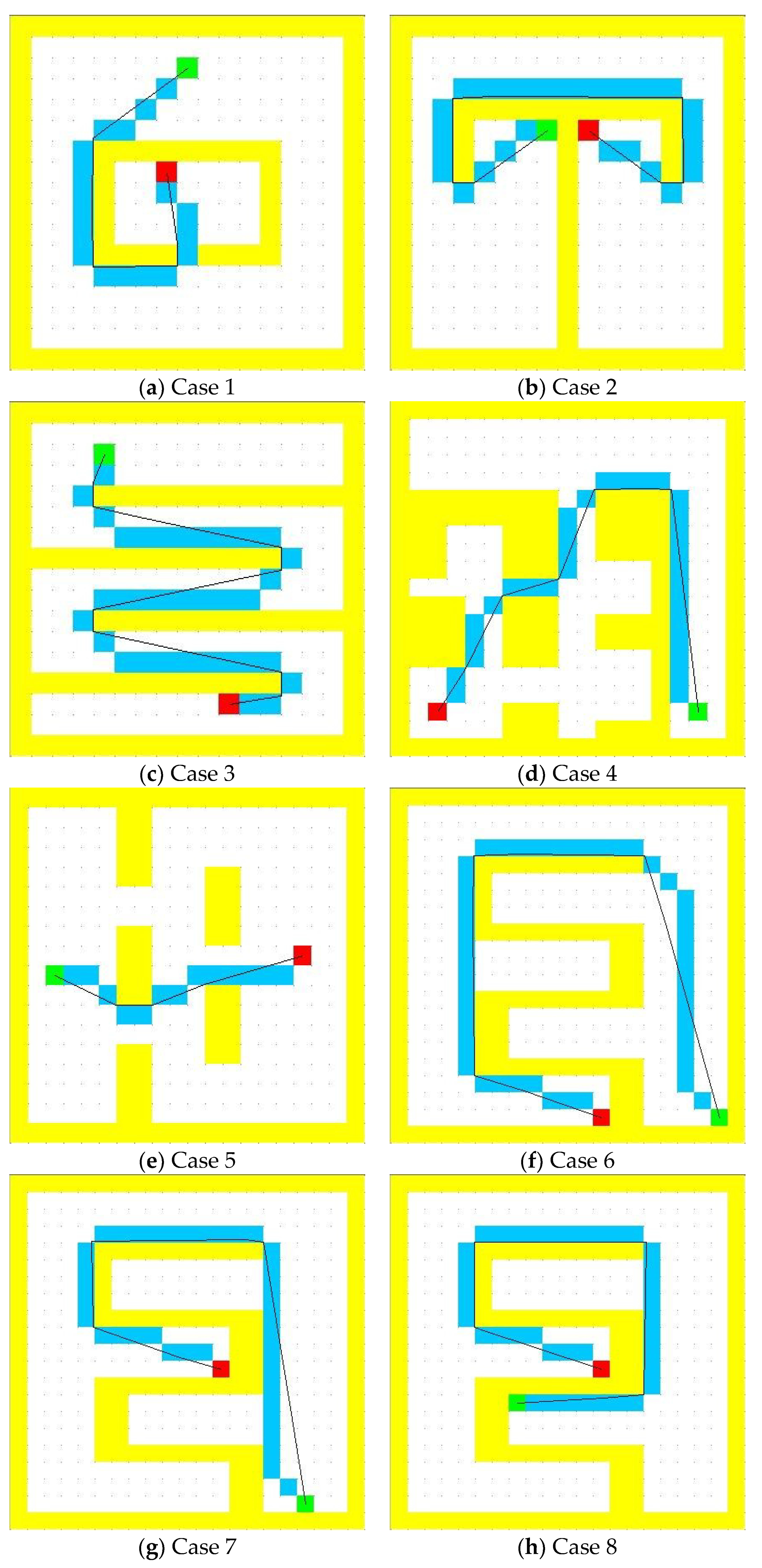
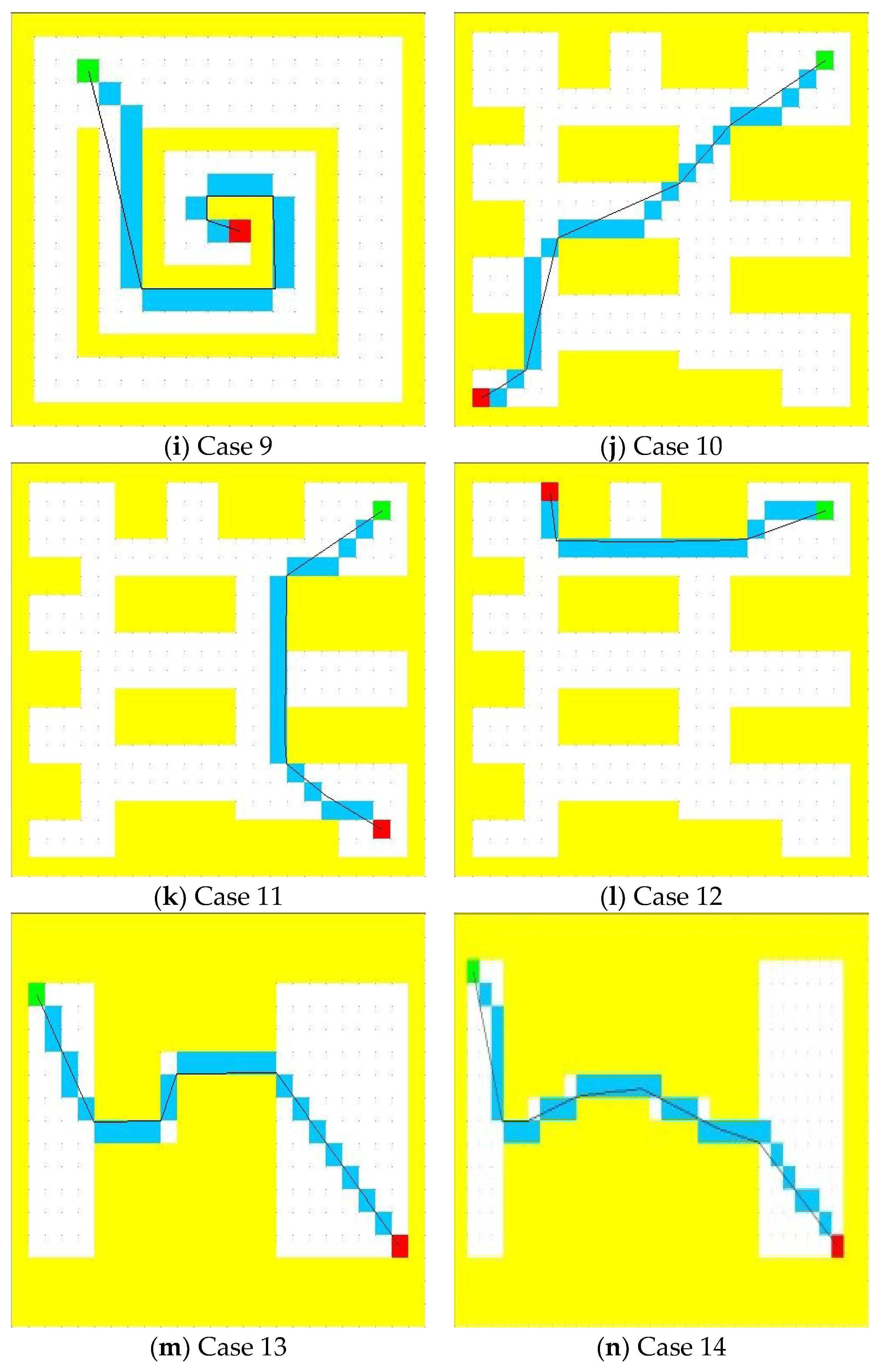
4.1. Simulation Experiment
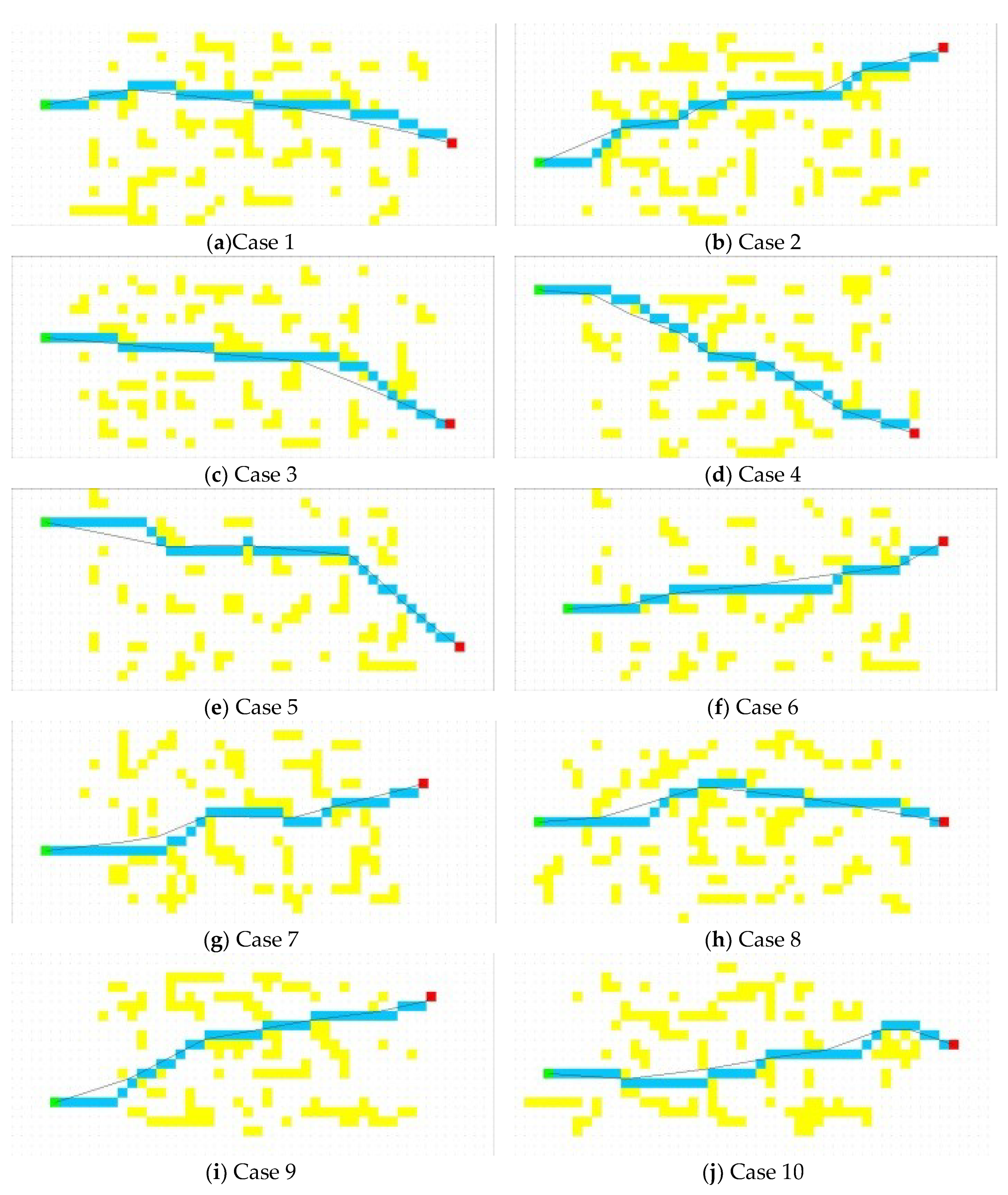
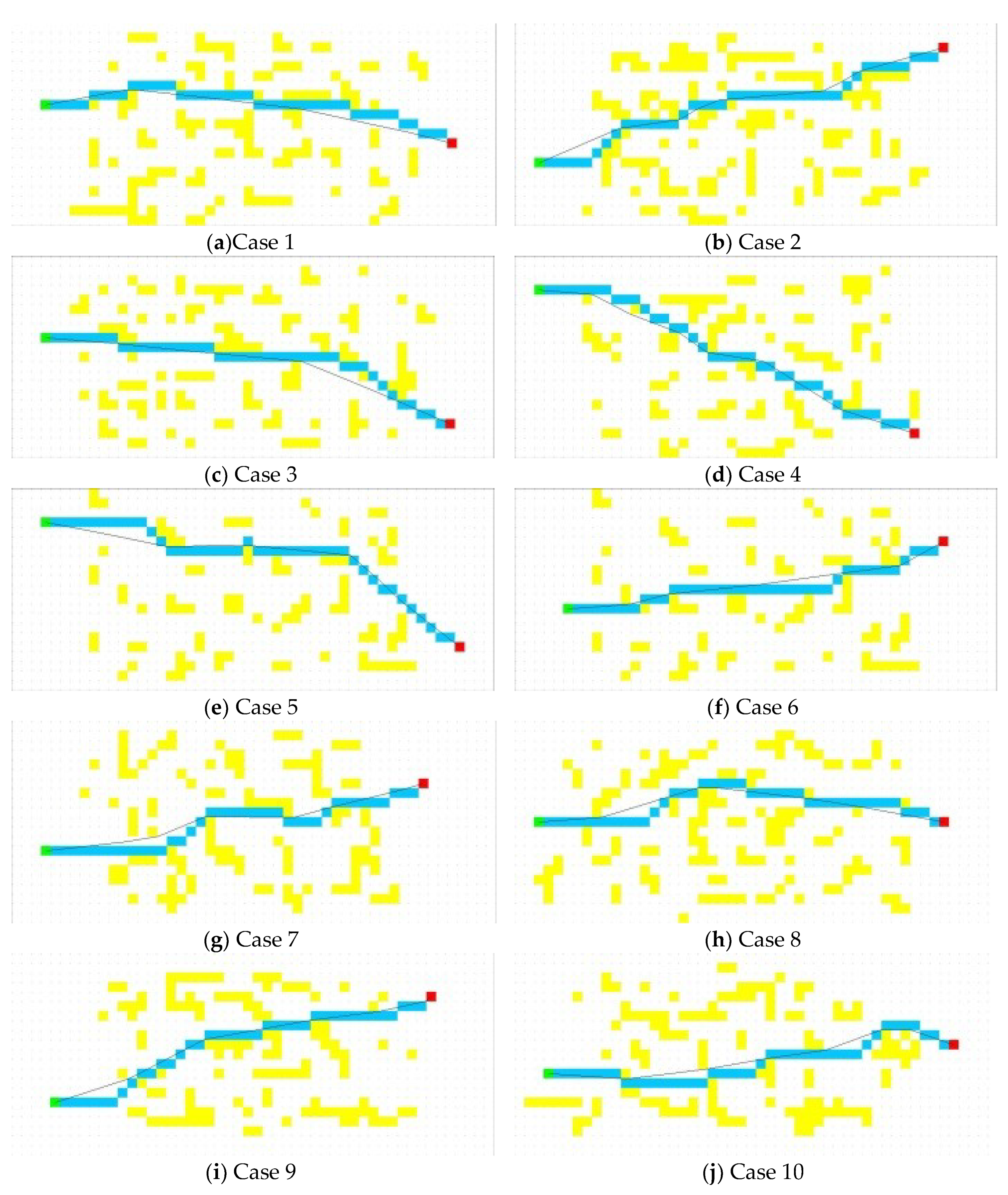
4.1.1. Random Map Experiment
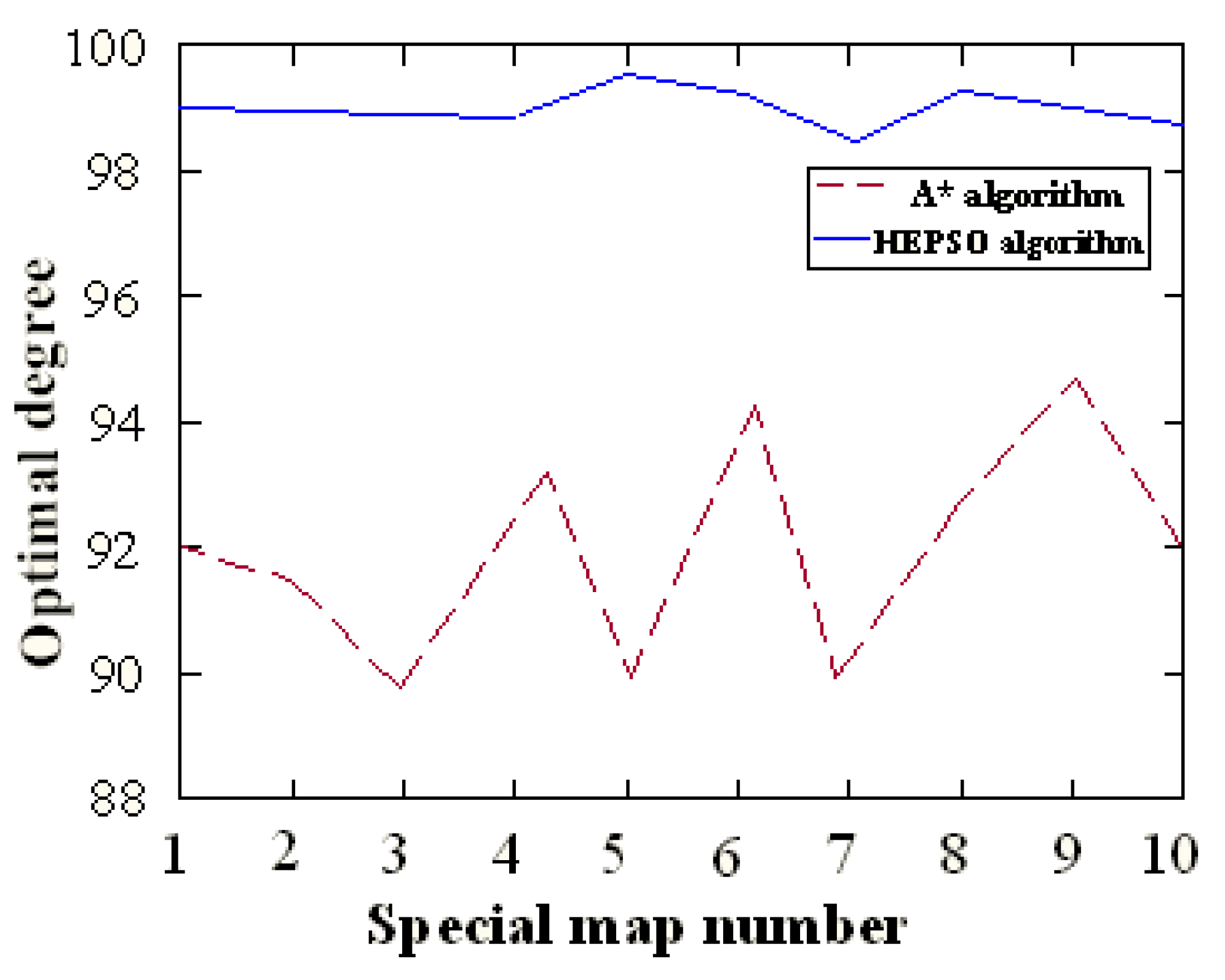
4.1.2. Experimental Result Analysis
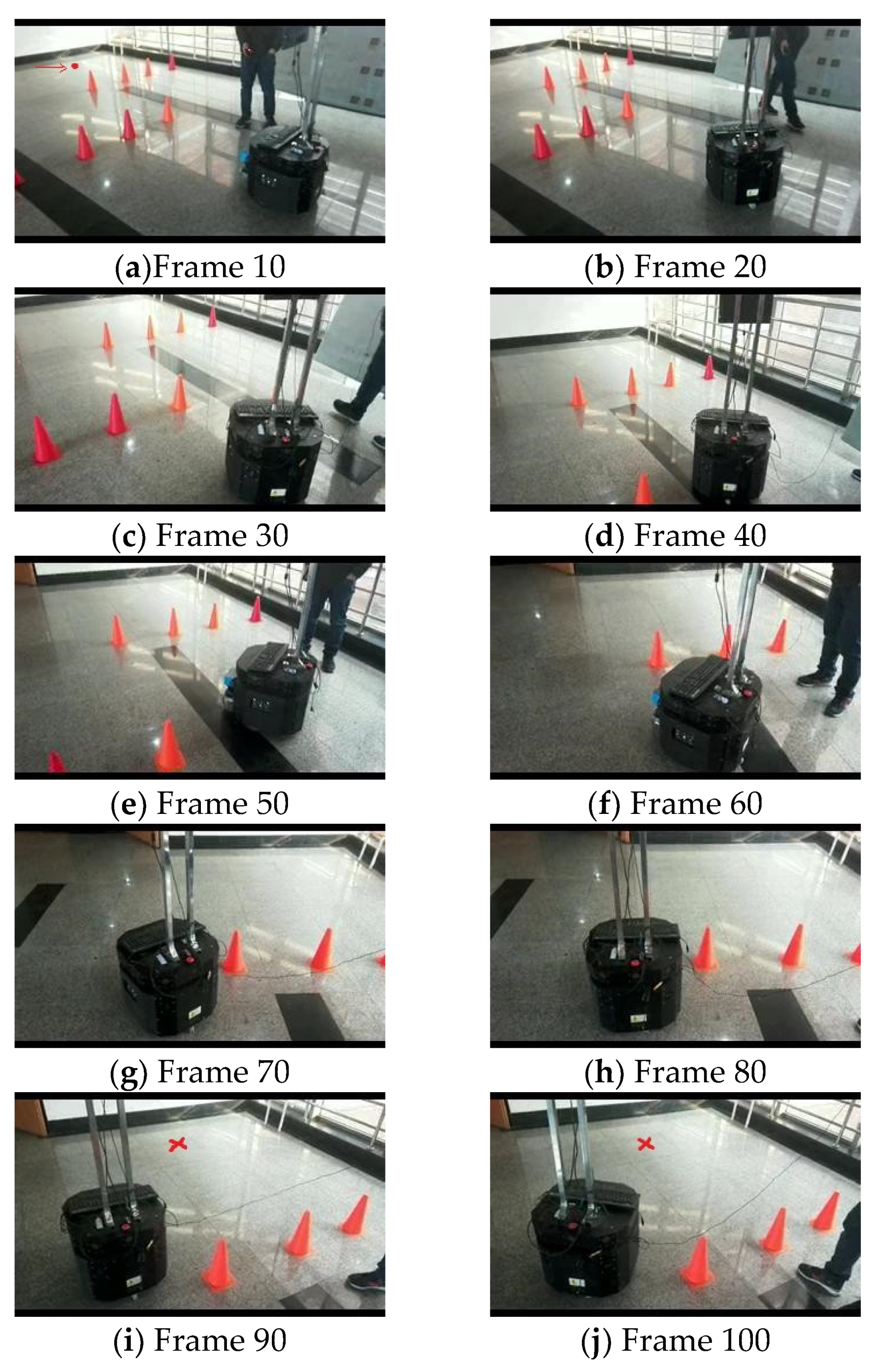
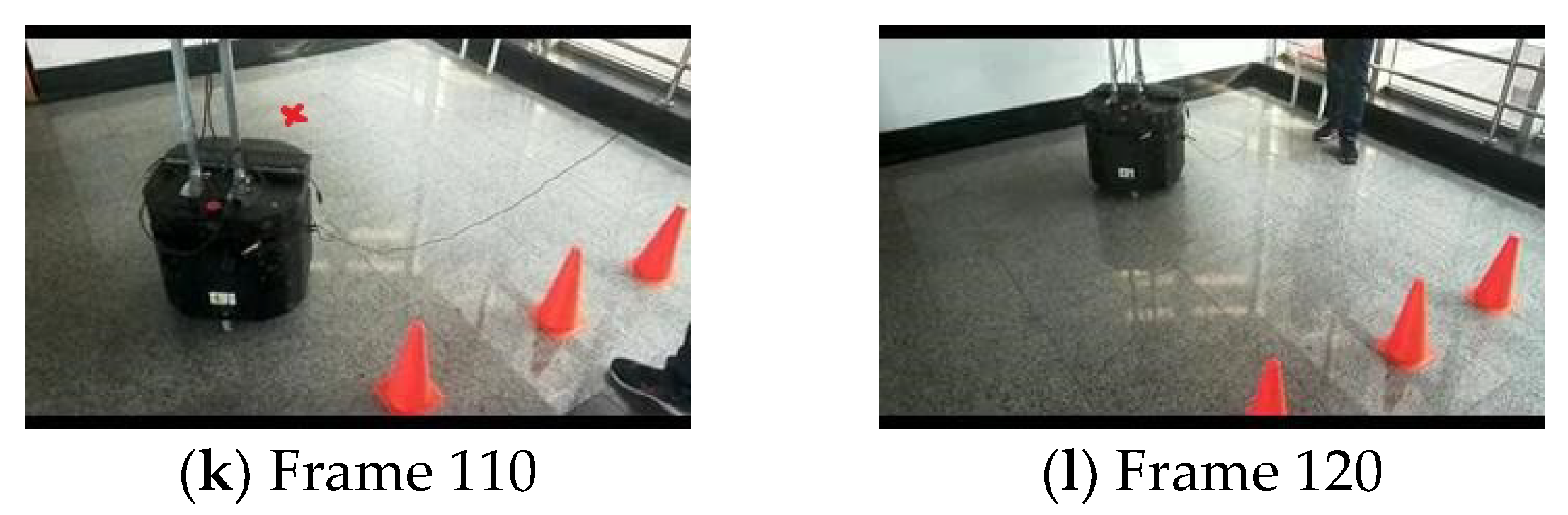
4.2. Robot Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, J.; Wang, J.; You, Z. An overview of dynamic parameter identification of robots. Robot. Comput. Integr. Manuf. 2010, 26, 414–419. [Google Scholar] [CrossRef]
- Zhong, C.L.; Liu, S.R.; Lu, Q.; Zhang, B.; Yang, S.X. An efficient fine-to-coarse way finding strategy for robot navigation in regionalized environments. IEEE Trans. Cybern. 2016, 46, 3157–3170. [Google Scholar] [PubMed]
- Zhu, H.; Deng, L. A landmark-based navigation method for autonomous aircraft. Optik 2016, 127, 3572–3575. [Google Scholar] [CrossRef]
- Wu, J.; Wang, D.; Wang, L. A control strategy of a two degrees-of-freedom heavy duty parallel manipulator. J. Dyn. Syst. Meas. Control 2015, 137. [Google Scholar] [CrossRef]
- He, B.; Wang, B.; Yan, T.; Han, Y. A distributed parallel motion control for the multi-thruster autonomous underwater vehicle. Mech. Des. Struct. Mach. 2013, 42, 236–257. [Google Scholar] [CrossRef]
- Fang, Y.W.; Qiao, D.D.; Zhang, L.; Yang, P.F.; Peng, W.S. A new cruise missile path tracking method based on second-order smoothing. Optik 2016, 127, 4948–4953. [Google Scholar]
- Wu, J.; Wang, J.; Wang, L.; Li, T. Dynamics and control of a planar 3-DOF parallel manipulator with actuation redundancy. Mech. Mach. Theory 2009, 44, 835–849. [Google Scholar] [CrossRef]
- Persson, S.M.; Sharf, I. Sampling-based A* algorithm for robot path-planning. Int. J. Robot. Res. 2014, 33, 1683–1708. [Google Scholar]
- Jaillet, L.; Siméon, T. Path deformation roadmaps: Compact graphs with useful cycles for motion planning. Int. J. Robot. Res. 2008, 27, 1175–1188. [Google Scholar] [CrossRef]
- Cai, C.; Ferrari, S. Information-driven sensor path planning by approximate cell decomposition. IEEE Trans Syst. Man Cybern. B 2009, 39, 672–689. [Google Scholar]
- Ghatee, M.; Mohades, A. Motion planning in order to optimize the length and clearance applying a Hopfield neural network. Expert Syst. Appl. 2009, 36, 4688–4695. [Google Scholar]
- Du, X.; Chen, H.; Gu, W. Neural network and genetic algorithm based global path planning in a static environment. J. Zhejiang Univ. Sci. A 2005, 6, 549–554. [Google Scholar]
- Liu, J.; Yang, J.; Liu, H.; Tian, X.; Gao, M. An improved ant colony algorithm for robot path planning. Soft Comput. 2017, 21, 5829–5839. [Google Scholar]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization. Appl. Soft Comput. 2017, 59, 68–76. [Google Scholar]
- He, B.; Ying, L.; Zhang, S.; Feng, X.; Yan, T.; Nian, R.; Shen, Y. Autonomous navigation based on unscented-FastSLAM using particle swarm optimization for autonomous underwater vehicles. Measurement 2015, 71, 89–101. [Google Scholar]
- Zhou, Z.; Wang, J.; Zhu, Z.; Yang, D.; Wu, J. Tangent navigated robot path planning strategy using particle swarm optimized artificial potential field. Optik 2018, 158, 639–651. [Google Scholar]
- Contreras-Cruz, M.A.; Ayala-Ramirez, V.; Hernandez-Belmonte, U.H. Mobile robot path planning using artificial bee colony and evolutionary programming. Appl. Soft Comput. 2015, 30, 319–328. [Google Scholar] [CrossRef]
- Chang, W.L.; Zeng, D.; Chen, R.C.; Guo, S. An artificial bee colony algorithm for data collection path planning in sparse wireless sensor networks. Int. J. Mach. Learn. Cybern. 2015, 6, 375–383. [Google Scholar]
- Montiel, O.; Sepúlveda, R.; Orozco-Rosas, U. Optimal path planning generation for mobile robots using parallel evolutionary artificial potential field. J. Intell. Robot. Syst. 2015, 79, 237–257. [Google Scholar]
- Chang, Y.; Yoshio, Y. Path planning of wheeled mobile robot with simultaneous free space locating capability. Intell. Serv. Robot. 2009, 2, 9–22. [Google Scholar]
- Jonghoek, K.; Zhang, F.M.; Magnus, E. A provably complete exploration strategy by constructing Voronoi diagrams. Auton. Robots 2010, 29, 367–380. [Google Scholar]
- Xin, Y.; Liang, H.; Du, M.; Mei, T.; Wang, Z.L.; Jiang, R.H. An improved A* algorithm for searching infinite neighborhoods. Robot 2014, 36, 627–633. [Google Scholar]
- Feng, X.; Ma, M.; Shi, Y.; Yu, H. Path planning for mobile robots based on social group search algorithm. J. Comput. Res. Dev. 2013, 50, 2543–2553. [Google Scholar]
- Ao, Y.; Shi, Y.; Zhang, W.; Li, Y. Improved particle swarm optimization with adaptive inertia weight. J. Univ. Electron. Sci. Technol. China 2014, 43, 874–880. [Google Scholar]
- Jiang, J.; Tian, M.; Wang, X.; Long, X.; Li, J. Adaptive particle swarm optimization algorithm via disturbing acceleration coefficients. J. Xidain Univ. 2012, 39, 74–80. [Google Scholar]
- Gong, D.; Zhang, J.; Zhang, Y. Multi-objective particle swarm optimization for robot path planning in environment with danger sources. J. Comput. 2011, 6, 1554–1561. [Google Scholar] [CrossRef]
- Jia, H.; Wei, Z.; He, X.; Zhang, L. Path planning based on improved particle swarm optimization algorithm. Trans. Chin. Soc. for Agric. Mach. 2018, 49, 102–105. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
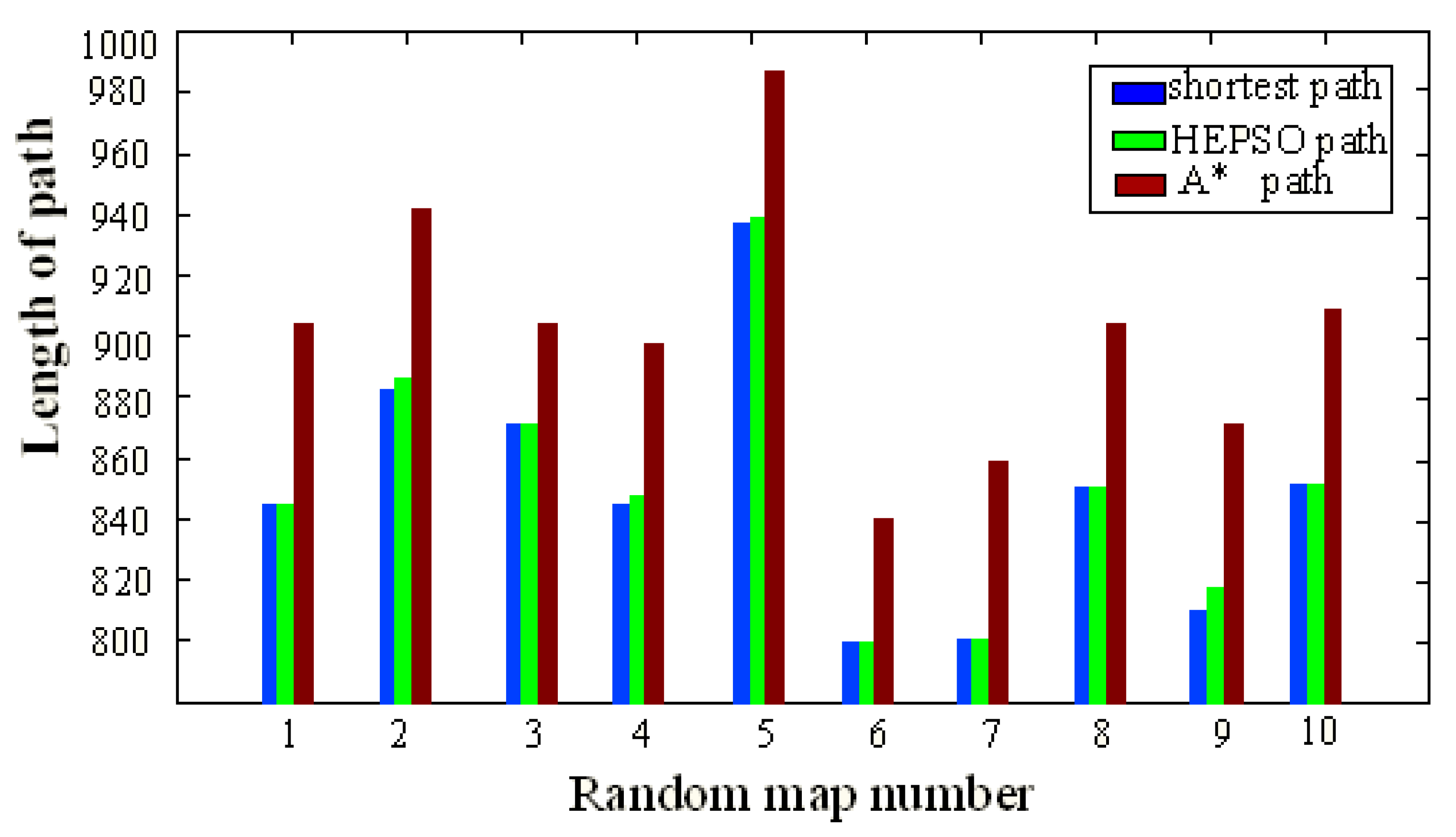
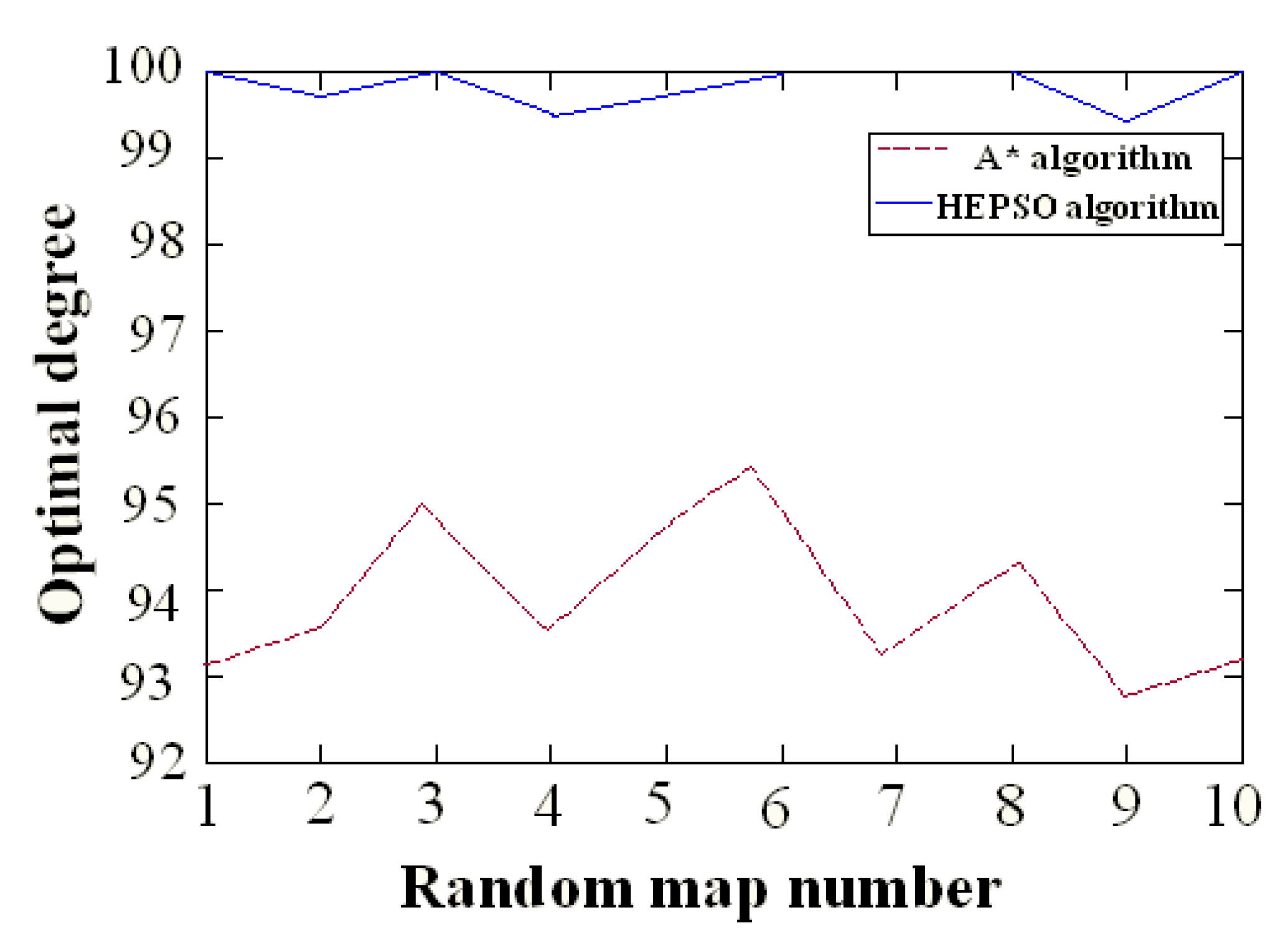
| R1 | R2 | R3 | R4 | R5 | R6 | R7 | R8 | R9 | R10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Time (s) | 0.213 | 0.221 | 0.217 | 0.212 | 0.234 | 0.200 | 0.200 | 0.214 | 0.205 | 0.214 |
| Shortest path length | 853 | 881 | 869 | 846 | 934 | 800 | 799 | 855 | 813 | 856 |
| HEPSO path length | 853 | 884 | 869 | 849 | 936 | 800 | 799 | 855 | 818 | 857 |
| A*length | 906 | 939 | 914 | 904 | 984 | 837 | 854 | 906 | 871 | 914 |
| HEPSO path optimal degree | 100 | 99.7 | 100 | 99.7 | 99.8 | 100 | 100 | 100 | 99.4 | 99.9 |
| A*path optimal degree | 93.2 | 93.4 | 94.8 | 93.1 | 94.6 | 95.4 | 93.1 | 94.0 | 92.9 | 93.2 |
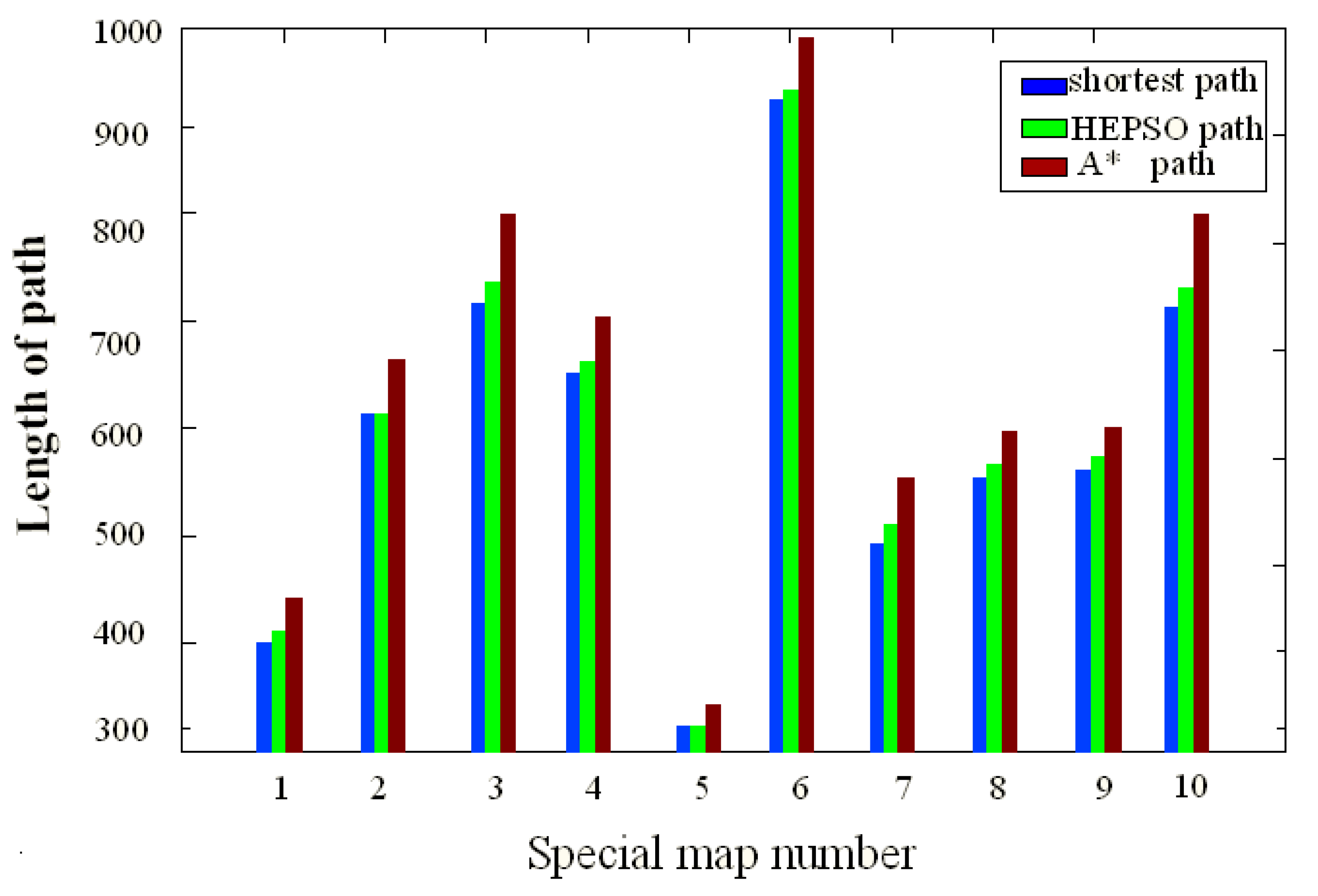
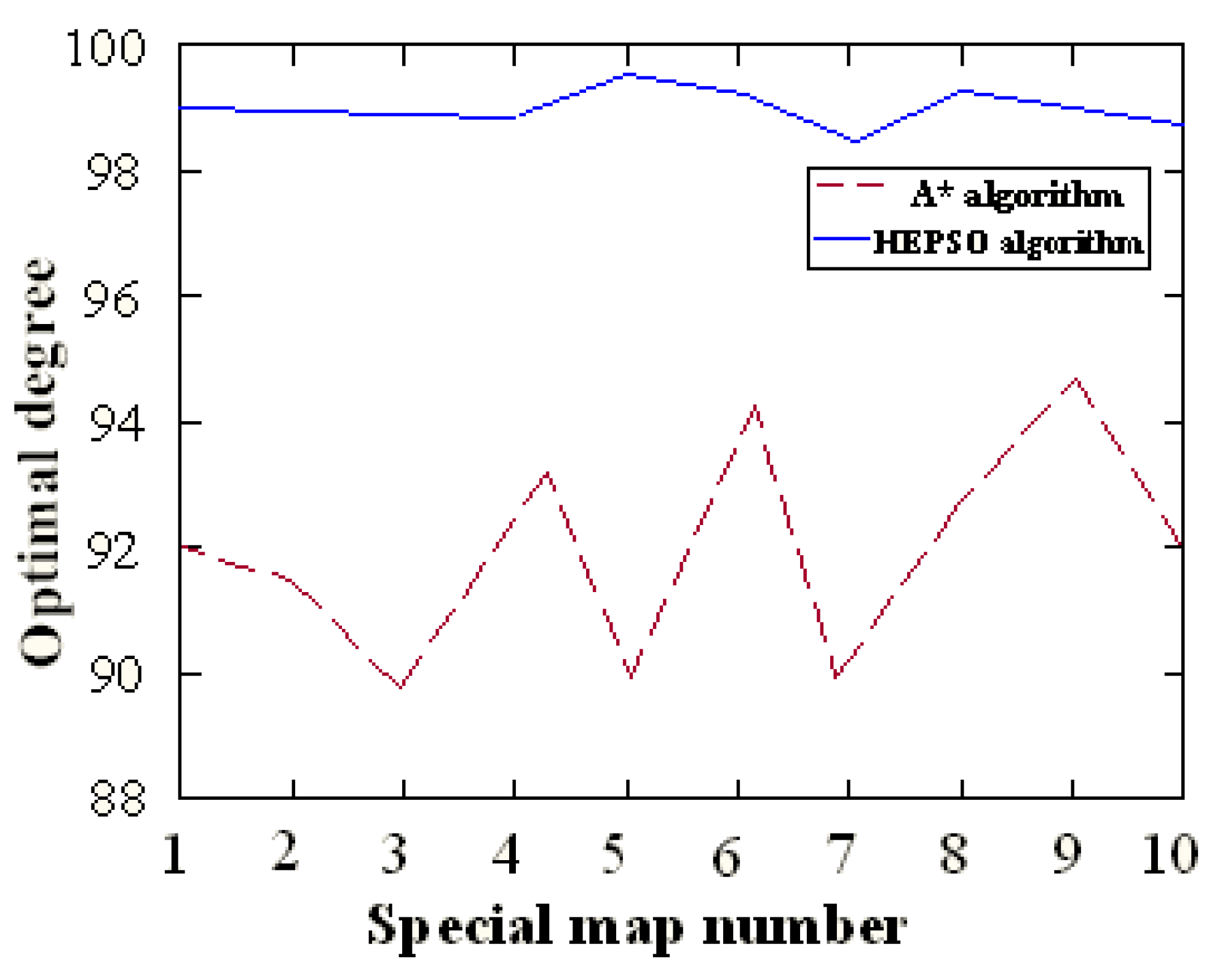
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Time (s) | 0.090 | 0.132 | 0.160 | 0.145 | 0.065 | 0.209 | 0.114 | 0.126 | 0.131 | 0.161 |
| Shortest path length | 405 | 592 | 716 | 648 | 293 | 941 | 508 | 572 | 587 | 720 |
| HEPSO path length | 409 | 598 | 724 | 656 | 294 | 947 | 515 | 575 | 591 | 729 |
| A* path length | 437 | 642 | 791 | 694 | 321 | 994 | 557 | 607 | 615 | 779 |
| HEPSO path optimal degree | 99.0 | 99.0 | 98.9 | 98.8 | 99.7 | 99.4 | 98.6 | 99.5 | 99.3 | 98.8 |
| A* path optimal degree | 92.1 | 91.6 | 89.5 | 92.9 | 90.4 | 94.4 | 90.4 | 93.4 | 95.2 | 91.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhou, Z. A Heuristic Elastic Particle Swarm Optimization Algorithm for Robot Path Planning. Information 2019, 10, 99. https://doi.org/10.3390/info10030099
Wang H, Zhou Z. A Heuristic Elastic Particle Swarm Optimization Algorithm for Robot Path Planning. Information. 2019; 10(3):99. https://doi.org/10.3390/info10030099
Chicago/Turabian StyleWang, Haiyan, and Zhiyu Zhou. 2019. "A Heuristic Elastic Particle Swarm Optimization Algorithm for Robot Path Planning" Information 10, no. 3: 99. https://doi.org/10.3390/info10030099
APA StyleWang, H., & Zhou, Z. (2019). A Heuristic Elastic Particle Swarm Optimization Algorithm for Robot Path Planning. Information, 10(3), 99. https://doi.org/10.3390/info10030099