A Fast Optimization Algorithm of FEM/BEM Simulation for Periodic Surface Acoustic Wave Structures



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theory
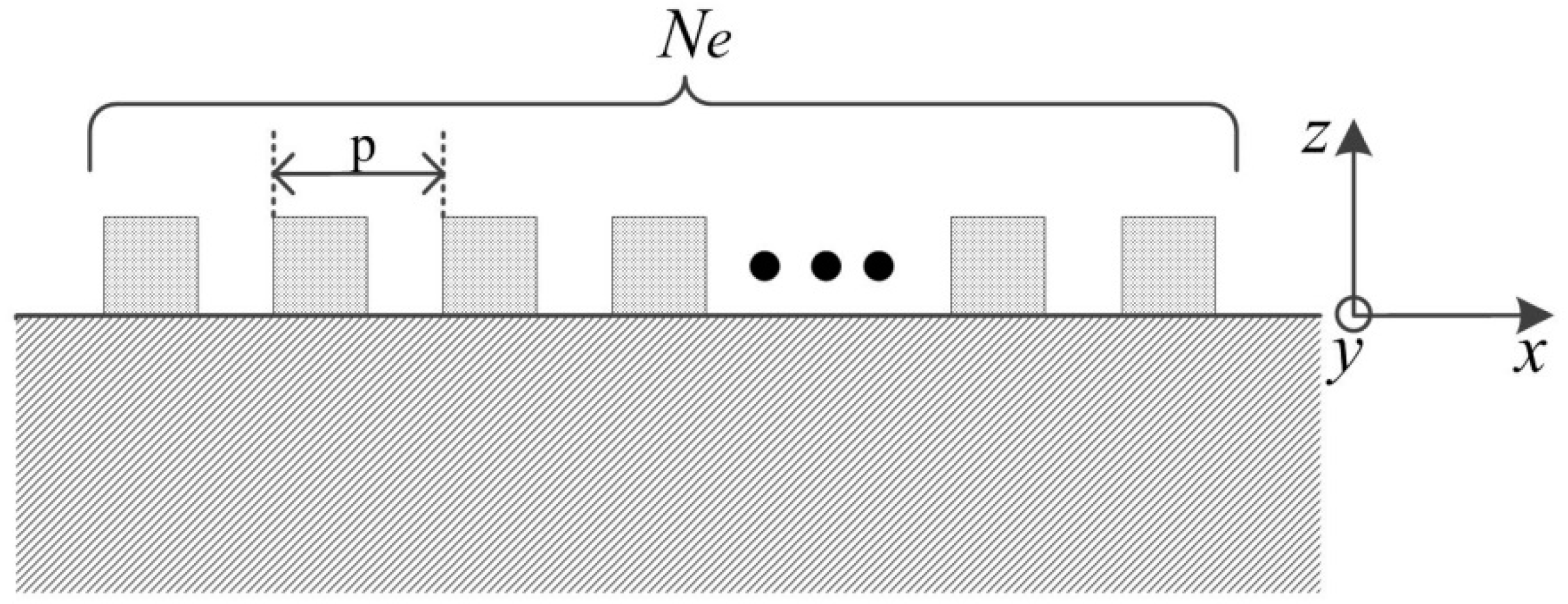
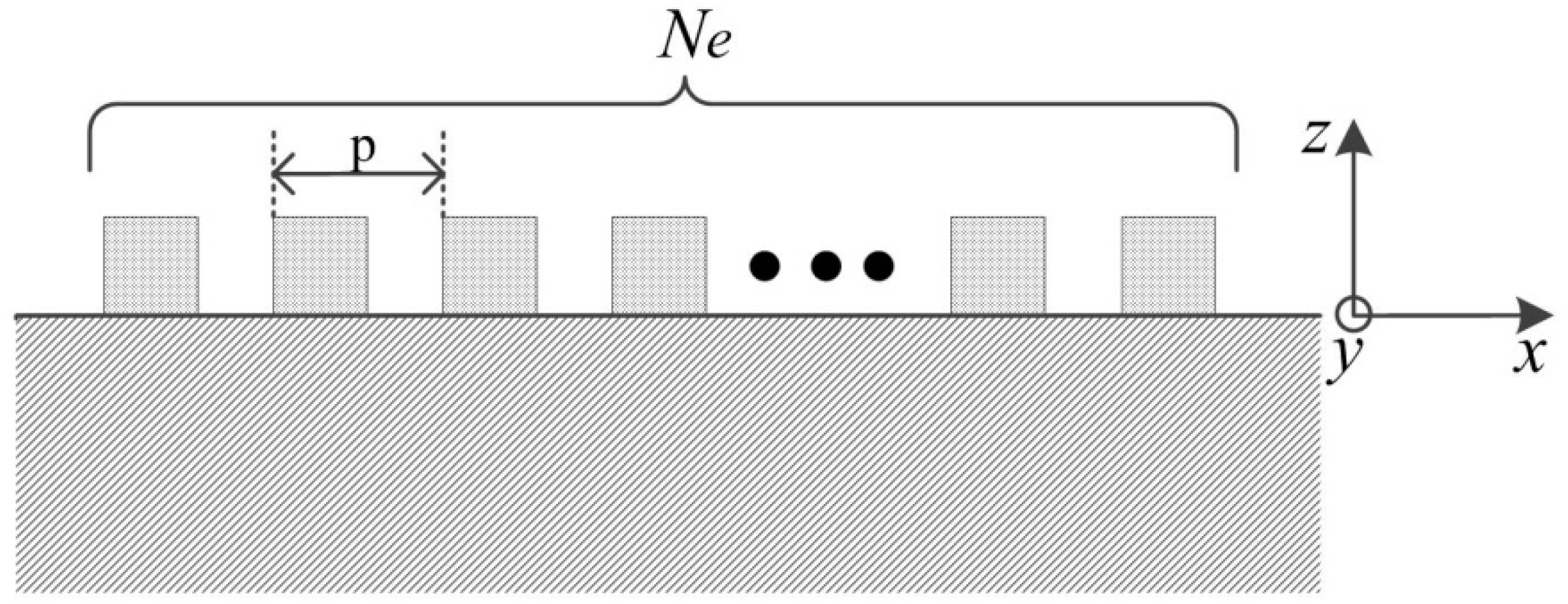
2.1. The Final FEM/BEM Equations for the Periodic SAW Structures
2.2. Fast Inversion Algorithm
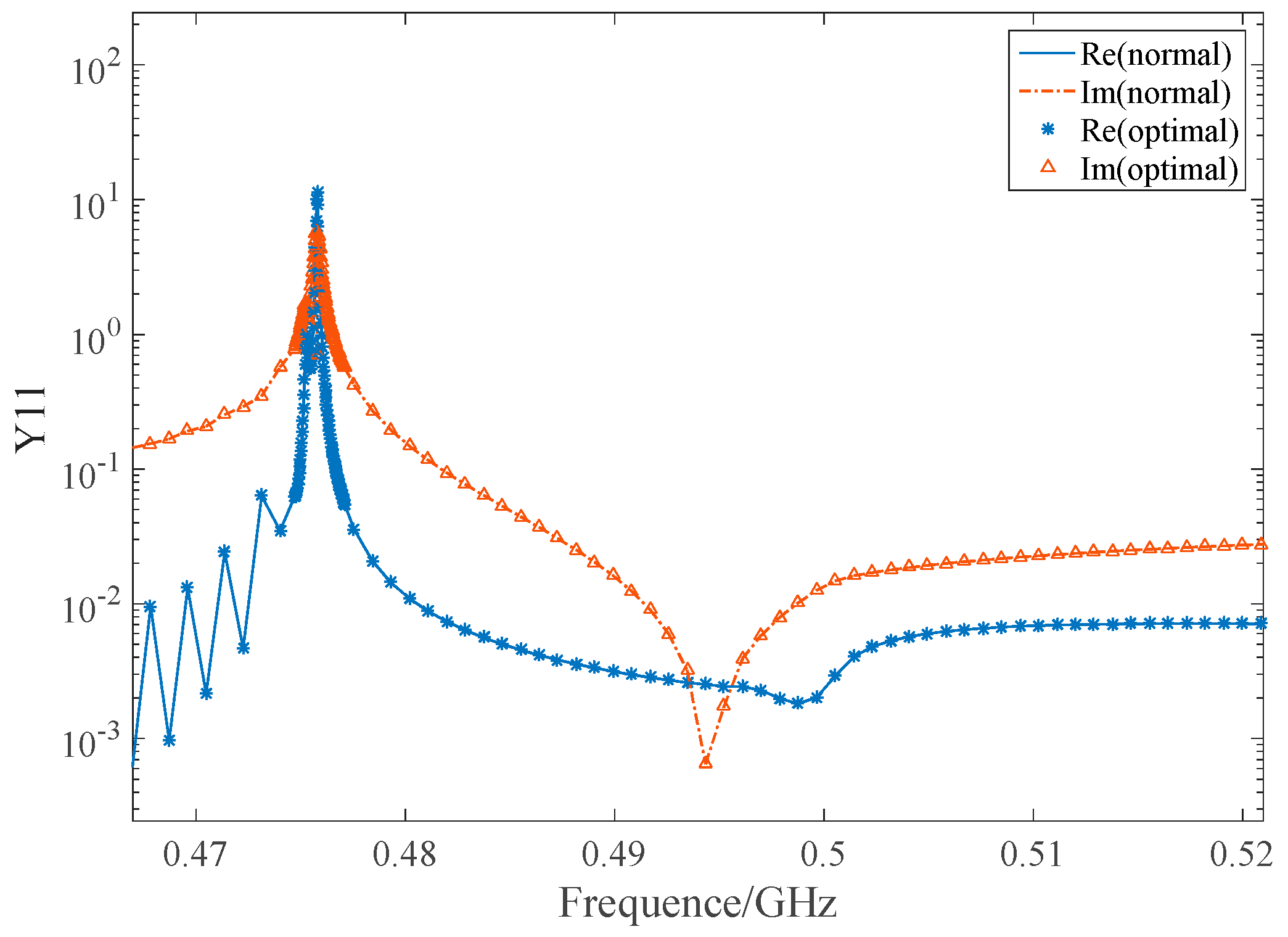
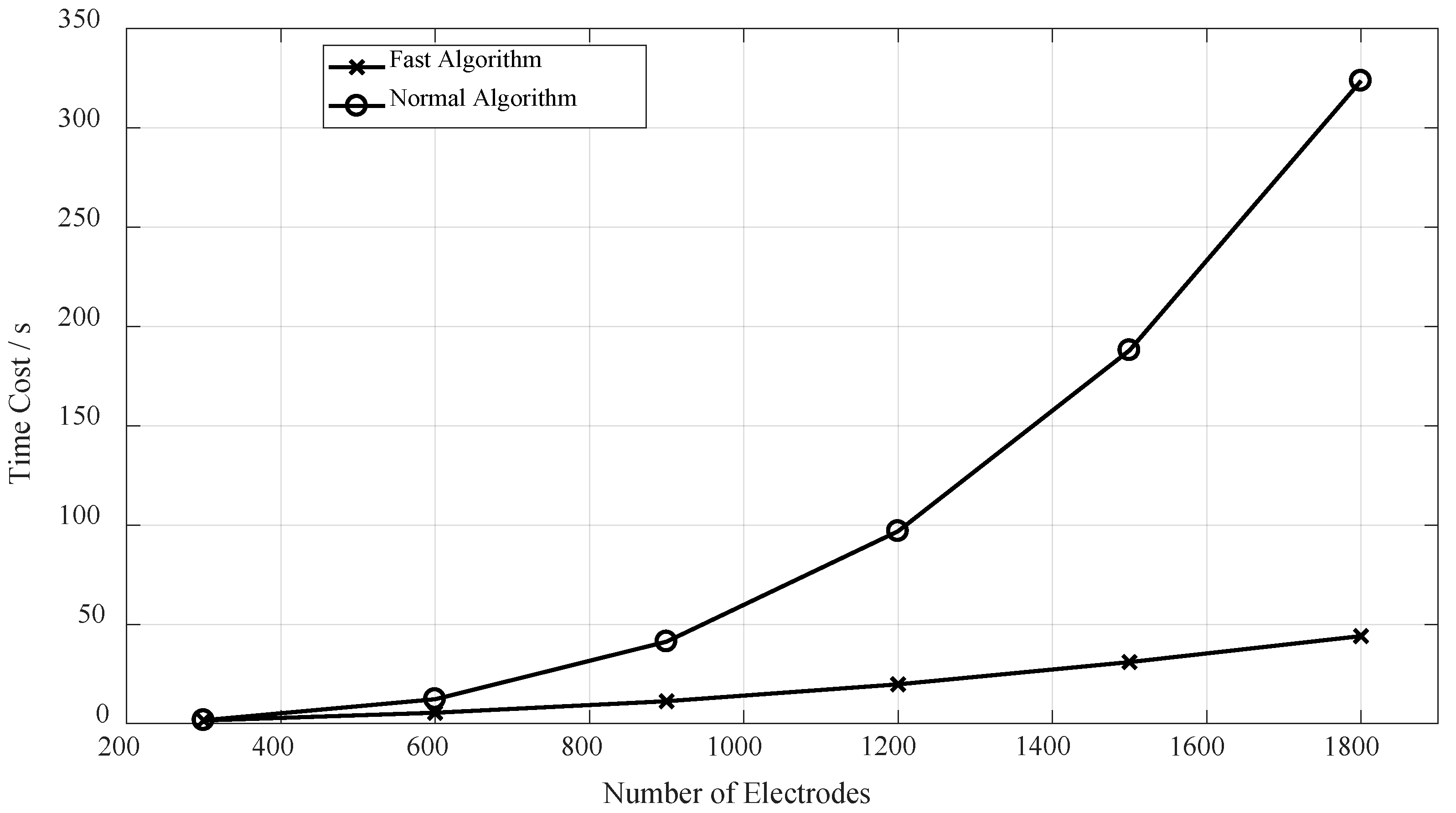
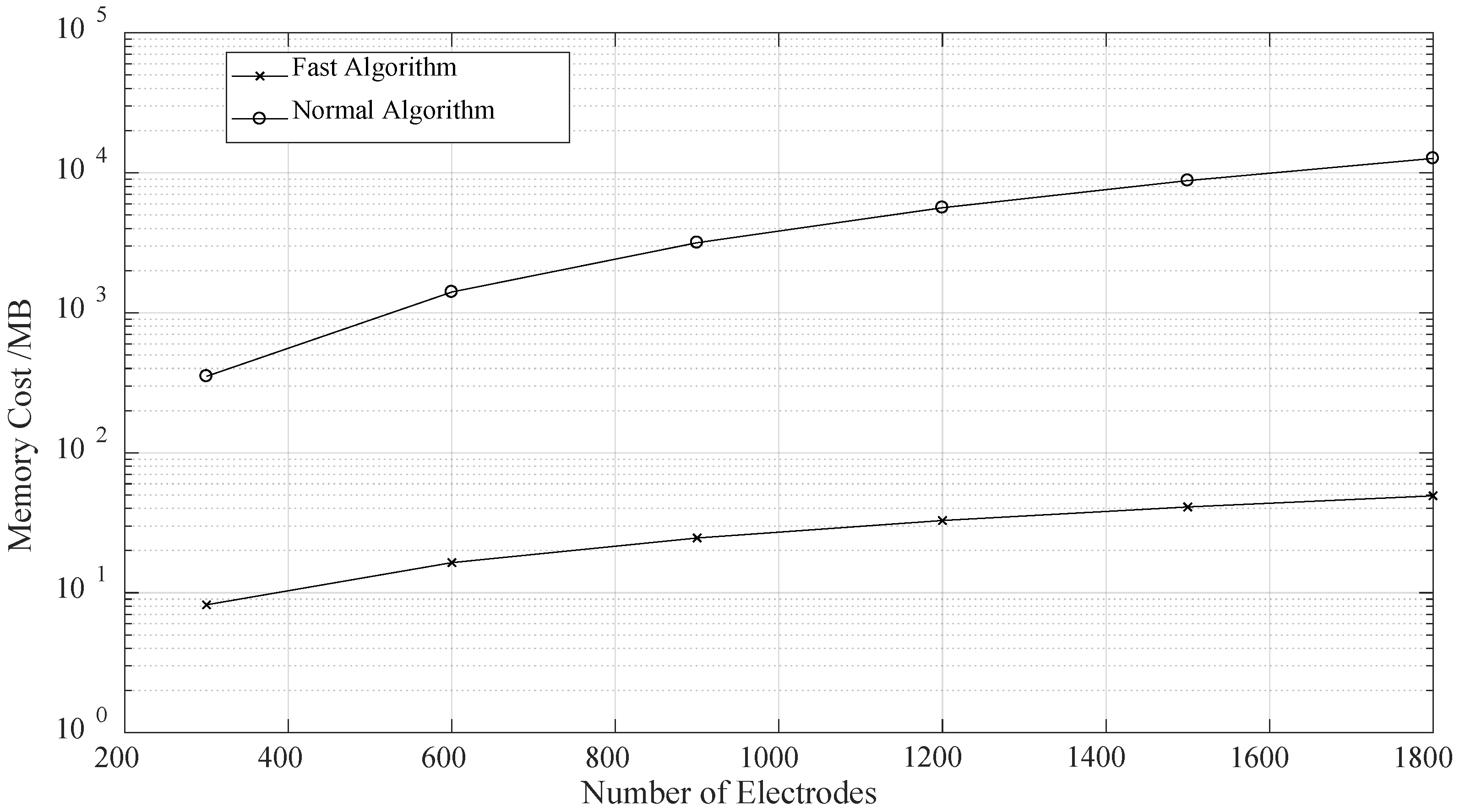
3. Algorithm Verification
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tancrell, R.H.; Holland, M.G. Acoustic Surface Wave Filters. In Proceedings of the IEEE 1970 Ultrasonics Symposium, San Francisco, CA, USA, 21–23 October 1970; pp. 393–409. [Google Scholar]
- Hartmann, C.S.; Bell, D.T.; Rosenfeld, R.C. Impulse model design of acoustic surface-wave filters. IEEE Tran. Microw. Theory Tech. 1973, 21, 162–175. [Google Scholar] [CrossRef]
- Smith, W.R.; Gerard, H.M.; Collins, J.H.; Reeder, T.M.; Shaw, H.J. Analysis of interdigital surface wave transducers by use of an equivalent circuit model. IEEE Trans. Microw. Theory Tech. 1969, 17, 856–864. [Google Scholar] [CrossRef]
- Smith, W.R. Experimental distinction between crossed-field and in-line three-port circuit models for interdigital transducers (short papers). IEEE Trans. Microw. Theory Tech. 1974, 22, 960–964. [Google Scholar] [CrossRef]
- Hartmann, C.S.; Wright, P.V.; Kansy, R.J.; Garber, E.M. An analysis of saw interdigital transducers with internal reflections and the application to the design of single-phase unidirectional transducers. In Proceedings of the IEEE Ultrasonics Symposium, San Diego, CA, USA, 27–29 October 1982; pp. 40–45. [Google Scholar]
- Dong-Pei, C.; Haus, H.A. Analysis of metal-strip saw gratings and transducers. IEEE Trans. Sonics Ultrason. 1985, 32, 395–408. [Google Scholar] [CrossRef]
- Plessky, V.P. A two parameter coupling-of-modes model for shear horizontal type saw propagation in periodic gratings. In Proceedings of the IEEE Ultrasonics Symposium, Baltimore, MD, USA, 31 October–3 November 1993; Volume 191, pp. 195–200. [Google Scholar]
- Abbott, B.P.; Hashimoto, K. A coupling-of-modes formalism for surface transverse wave devices. In Proceedings of the 1995 IEEE Ultrasonics Symposium, Seattle, WA, USA, 7–10 November 1995; Volume 231, pp. 239–245. [Google Scholar]
- Koskela, J.; Plessky, V.P.; Salomaa, M.M. Saw/lsaw com parameter extraction from computer experiments with harmonic admittance of a periodic array of electrodes. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 806–816. [Google Scholar] [CrossRef] [PubMed]
- Plessky, V.; Koskela, J. Coupling-of-modes analysis of saw devices. Int. J. High Speed Electr. Syst. 2000, 10, 867–947. [Google Scholar] [CrossRef]
- Plessky, V.P.; Chen, D.P.; Hartmann, C.S. “Patch” improvements to com model for leaky waves. In Proceedings of the IEEE Ultrasonics Symposium, Cannes, France, 31 October–3 November 1994; Volume 291, pp. 297–300. [Google Scholar]
- Buchner, M.; Ruile, W.; Dietz, A.; Dill, R. Fem analysis of the reflection coefficient of saws in an infinite periodic array. In Proceedings of the 1991 IEEE Ultrasonics Symposium, Orlando, FL, USA, 8–11 December 1991; Volume 371, pp. 371–375. [Google Scholar]
- Milsom, R.F.; Reilly, N.H.C.; Redwood, M. Analysis of generation and detection of surface and bulk acoustic waves by interdigital transducers. IEEE Trans. Sonics Ultrason. 1977, 24, 147–166. [Google Scholar] [CrossRef]
- Baghai-Wadji, A.R.; Manner, O.; Ganss-Puchstein, R. Analysis and measurement of transducer end radiation in saw filters on strongly coupling substrates. IEEE Trans. Microw. Theory Tech. 1989, 37, 150–158. [Google Scholar] [CrossRef]
- Visintini, G.; Baghai-Wadji, A.; Manner, O. Modular two-dimensional analysis of saw filters. I. Theory. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1992, 39, 61–72. [Google Scholar] [CrossRef] [PubMed]
- Ventura, P.; Hode, J.M.; Solal, M.; Desbois, J.; Ribbe, J. Numerical methods for saw propagation characterization. In Proceedings of the 1998 IEEE Ultrasonics Symposium, Sendai, Japan, 5–8 October 1998; Volume 171, pp. 175–186. [Google Scholar]
- Finger, N.; Kovacs, G.; Schoberl, J.; Langer, U. Accurate fem/bem-simulation of surface acoustic wave filters. In Proceedings of the IEEE Symposium on Ultrasonics, Honolulu, HI, USA, 5–8 October 2003; Volume 1682, pp. 1680–1685. [Google Scholar]
- Peach, R.C. In 6d-3 simplified green function techniques for general saw device analysis and optimization. In Proceedings of the 2006 IEEE Ultrasonics Symposium, Vancouver, BC, Canada, 2–6 October 2006; pp. 371–375. [Google Scholar]
- Peach, R.C. Approximate green’s function representations for the analysis of saw and leaky wave devices. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 2268–2281. [Google Scholar] [CrossRef] [PubMed]
- Ventura, P.; Hode, J.M.; Lopes, B. Rigorous Analysis of Finite Saw Devices with Arbitrary Electrode Geometries. In Proceedings of the 1995 IEEE Ultrasonics Symposium Proceedings: An International Symposium, Seattle, WA, USA, 7–10 November 1995; Volume 251, pp. 257–262. [Google Scholar]
- Laude, V.; Reinhardt, A.; Wilm, M.; Khelif, A.; Ballandras, S. Fast FEM/BEM simulation of saw devices via asymptotic waveform evaluation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 359–363. [Google Scholar] [CrossRef]
- Ke, Y.; Li, H.; He, S. Fast FEM/BEM simulation of non-periodic saw structures. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 815–818. [Google Scholar]
- Wang, W.B. Rigorous Simulation of Finite Length SAW Device. Ph.D. Thesis, Nanjing University, Nanjing, China, 2004. [Google Scholar]
- Luo, W. Simulation and Design of Wireless Passive Impedance-loaded SAW Sensors Based on the FEM/BEM Method. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2009. [Google Scholar]
- Wang, H. Study on the Rapid and Precise Simulation of Surface Acoustic Wave Devices. Ph.D. Thesis, Nanjing University, Nanjing, China, 2013. [Google Scholar]
- Trench, W.F. An algorithm for the inversion of finite hankel matrices. J. Soc. Ind. Appl. Math. 1965, 13, 1102–1107. [Google Scholar] [CrossRef]
- Zohar, S. Toeplitz matrix inversion: The algorithm of W. F. Trench. J. ACM 1969, 16, 592–601. [Google Scholar] [CrossRef]
- Xu, S.L. Numerical Analysis and Algorithm; China Machine Press: Beijing, China, 2003; p. 76. (In Chinese) [Google Scholar]
- Béreux, N. Fast direct solvers for some complex symmetric block toeplitz linear systems. Linear Algebra Appl. 2005, 404, 193–222. [Google Scholar] [CrossRef]
- Gamble, K.J.; Malocha, D.C. Simulation of short LSAW transducers including electrode mass loading and finite finger resistance. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 47–56. [Google Scholar] [CrossRef]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Lu, Z.; Ke, Y.; Tian, Y.; Luo, W. A Fast Optimization Algorithm of FEM/BEM Simulation for Periodic Surface Acoustic Wave Structures. Information 2019, 10, 90. https://doi.org/10.3390/info10030090
Li H, Lu Z, Ke Y, Tian Y, Luo W. A Fast Optimization Algorithm of FEM/BEM Simulation for Periodic Surface Acoustic Wave Structures. Information. 2019; 10(3):90. https://doi.org/10.3390/info10030090
Chicago/Turabian StyleLi, Honglang, Zixiao Lu, Yabing Ke, Yahui Tian, and Wei Luo. 2019. "A Fast Optimization Algorithm of FEM/BEM Simulation for Periodic Surface Acoustic Wave Structures" Information 10, no. 3: 90. https://doi.org/10.3390/info10030090
APA StyleLi, H., Lu, Z., Ke, Y., Tian, Y., & Luo, W. (2019). A Fast Optimization Algorithm of FEM/BEM Simulation for Periodic Surface Acoustic Wave Structures. Information, 10(3), 90. https://doi.org/10.3390/info10030090