
Sound Propagation with Undulating Bottom in Shallow Water


Abstract
:1. Introduction
2. Methods and Experiment Introduction
2.1. RAM-PE Model
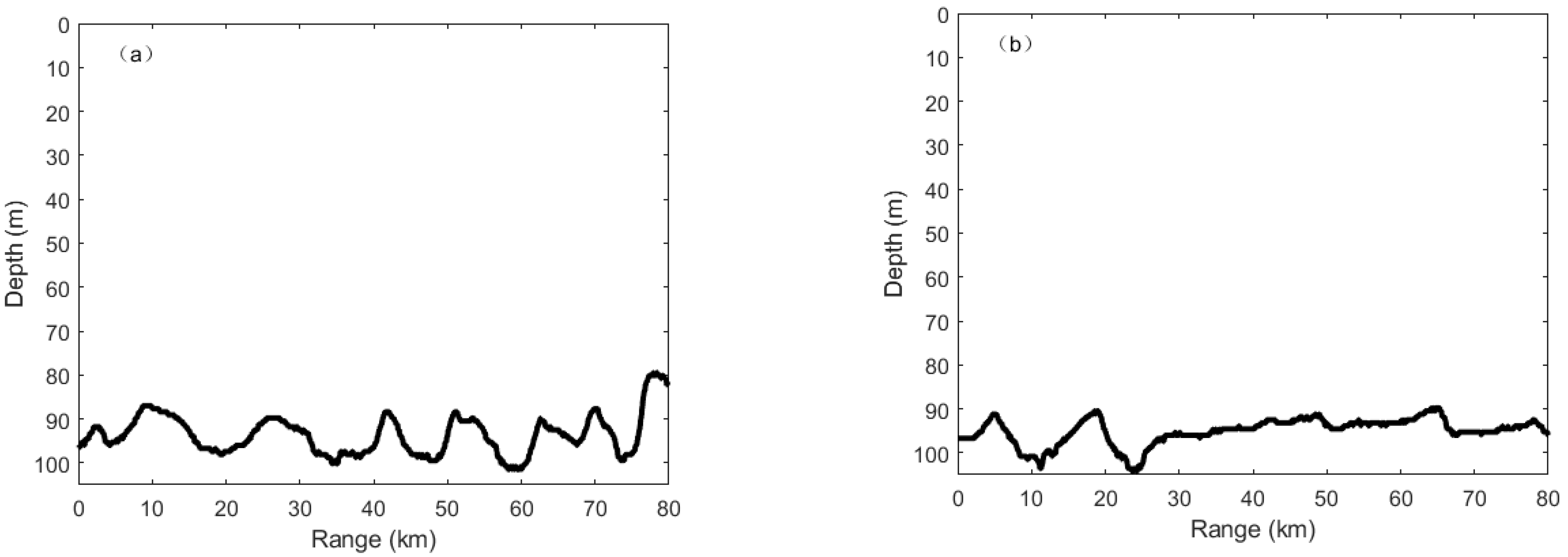
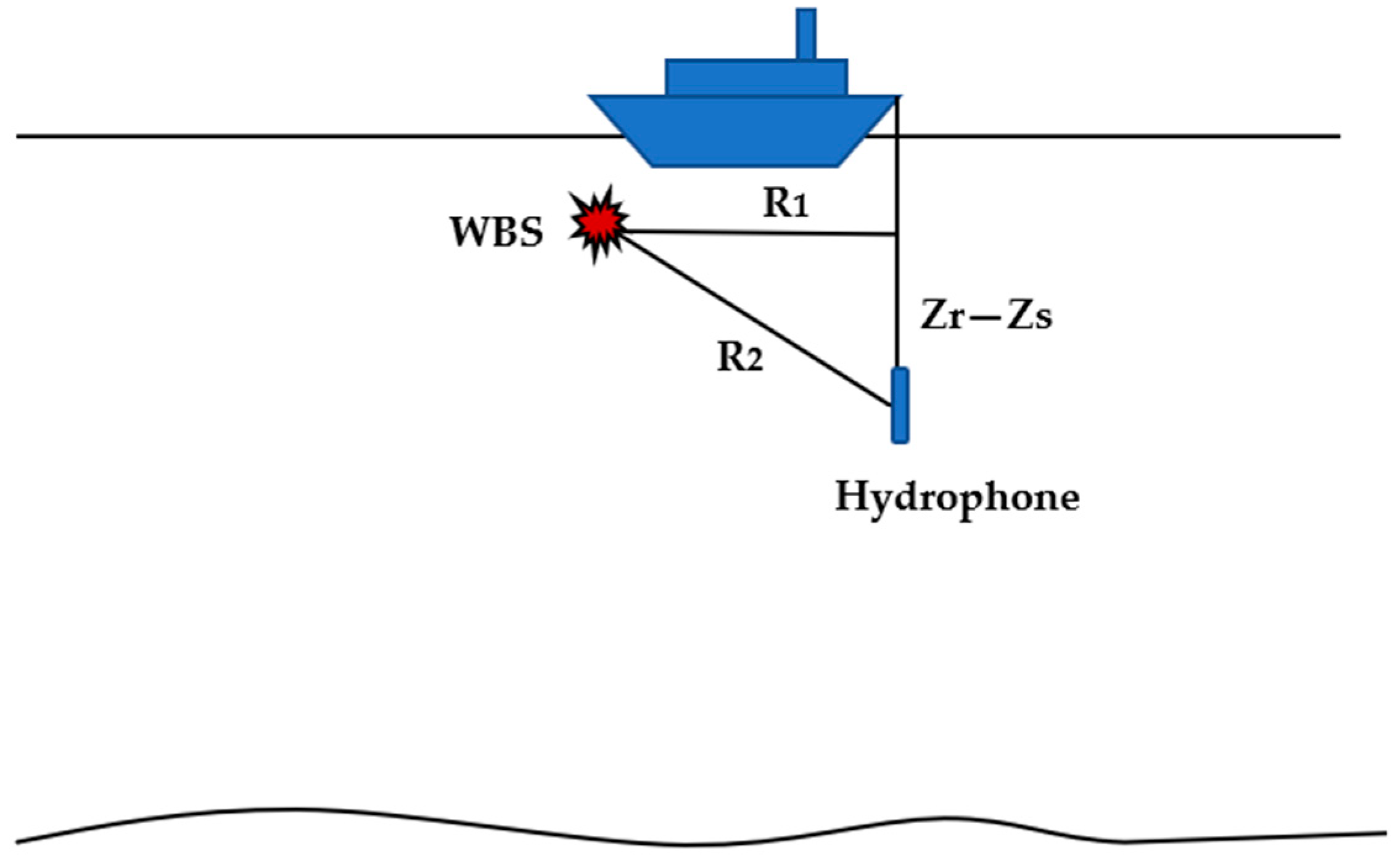
2.2. Experiment Descriptions
3. Experimental Results and Numerical Simulations
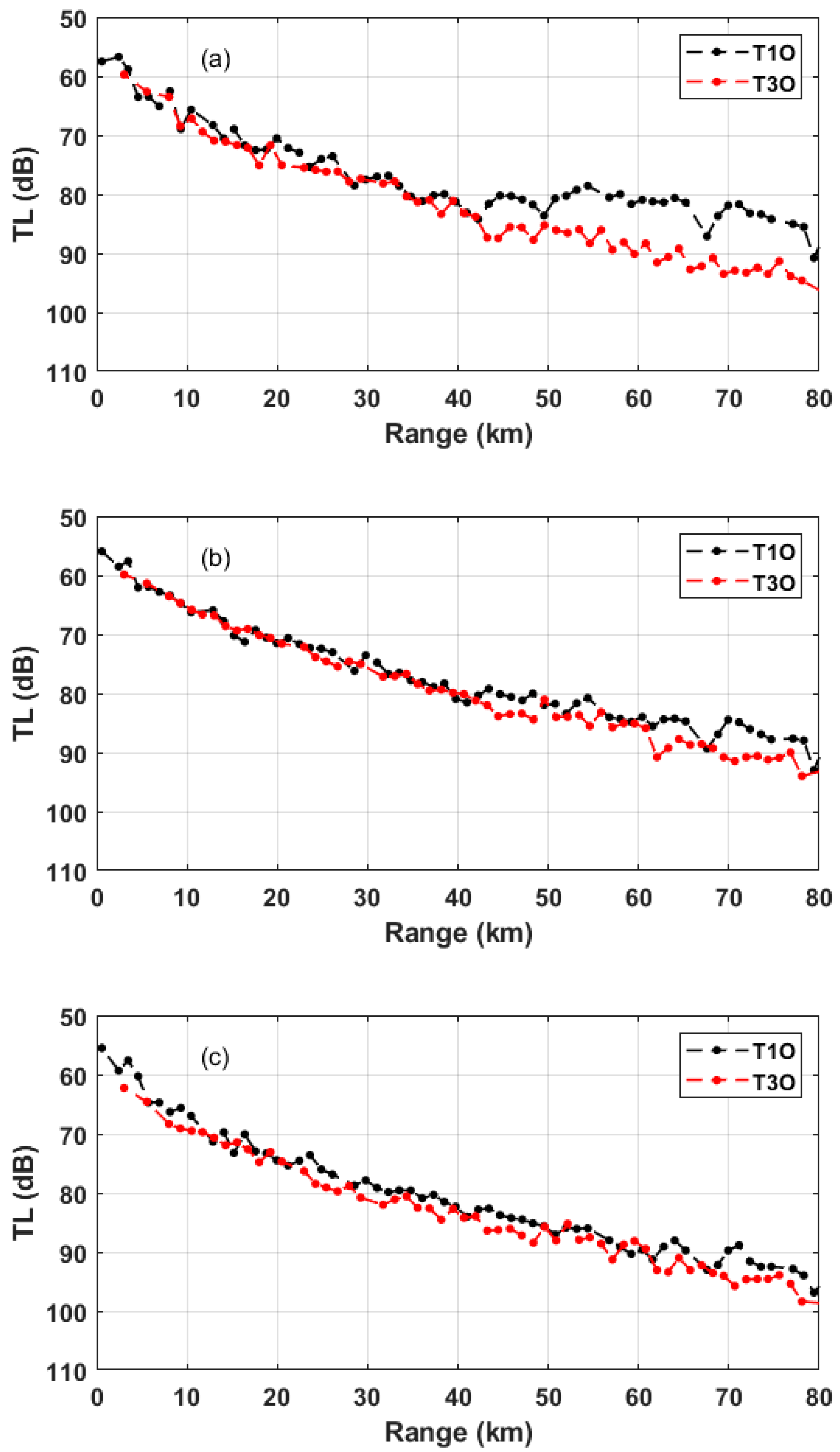
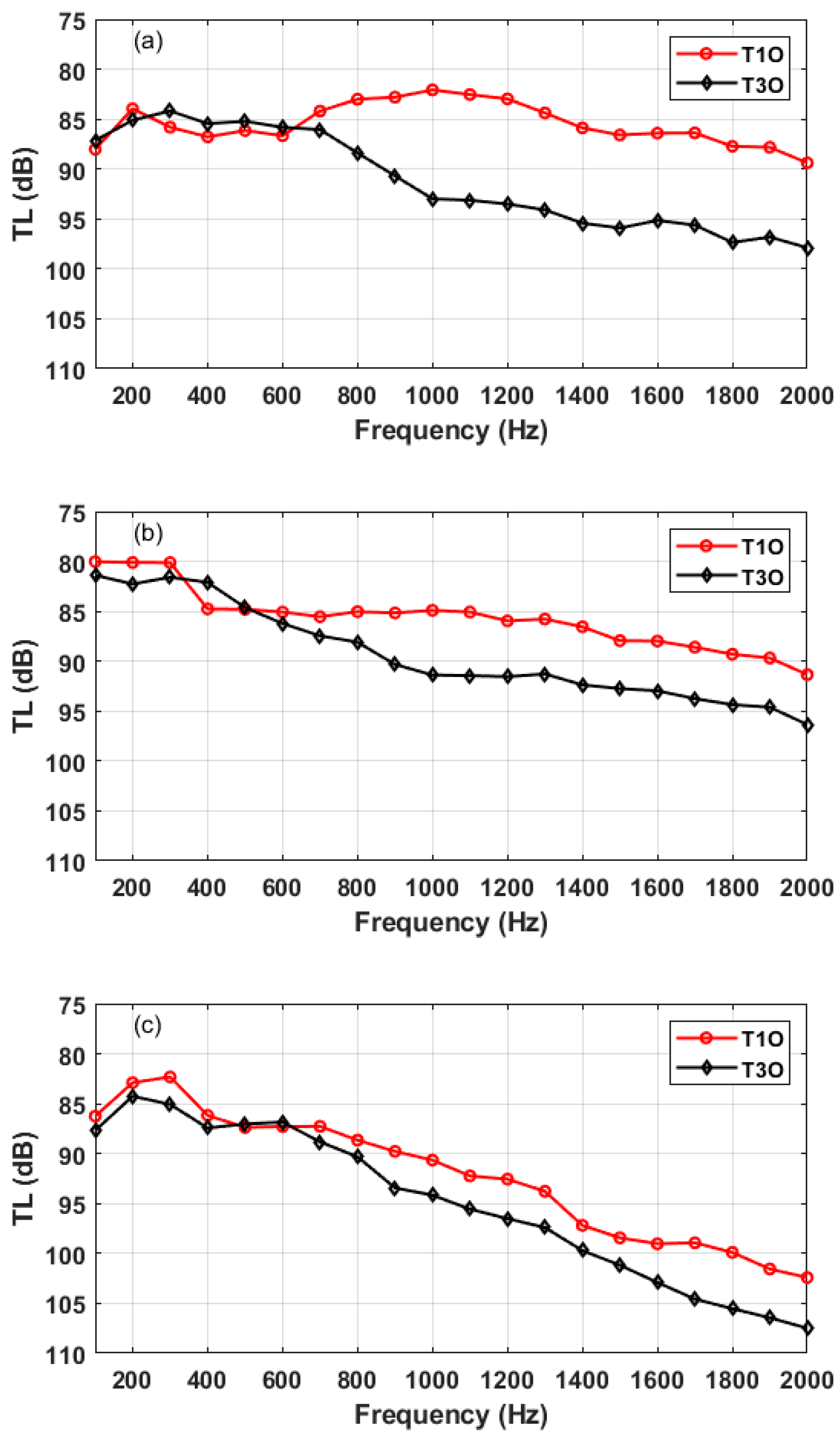
3.1. Experimental Results
3.2. Numerical Simulations
4. Analysis of Physical Mechanism of Underwater Sound Propagation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Katsnelson, B.; Petnikov, V.; Lynch, J. Fundamentals of Shallow Water Acoustics; Springer Science & Business Media: New York, NY, USA, 2012; pp. 1–3. [Google Scholar]
- Northrop, J.; Loughridge, M.S.; Werner, E.W. Effect of near-source bottom conditions on long-range sound propagation in the ocean. J. Geophys. Res. 1968, 73, 3905–3908. [Google Scholar] [CrossRef]
- Carlson, P.R. Holocene slump on continental shelf off Malaspina Glacier, Gulf of Alaska. Am. Assoc. Pet. Geol. Bull. 1978, 62, 2412–2426. [Google Scholar]
- Rousseau, T.H.; Jacobson, M.J.; Siegmann, W.L. Ray transmissions over a sloping bottom in shallow water. J. Acoust. Soc. Am. 1985, 78, 1713–1726. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.L. The Effects of Internal Waves, Surface Fluctuation and Bottom Roughness on Matched Field Source Localization in Shallow Water. Ph.D. Thesis, Institute of Acoustics, Chinese Academy of Sciences, Beijing, China, 2002. [Google Scholar]
- Chiu, Y.S.; Chang, Y.Y. Normal incidence measurement in a subaqueous sand dune field in the South China Sea. J. Acoust. Soc. Am. 2014, 136, 376–382. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, Z.G.; Li, Z.L.; Zhang, R.H.; Ren, Y.; Qin, J.X.; He, L. Sound propagation in deep water with a sloping bottom. Acta Phys. Sin. 2016, 65, 014303. [Google Scholar]
- Han, F.; Wang, K.; Sun, J.G. The influence of irregular seafloor topography on the seismic wave field and migration imaging. Acta. Oceanol. Sin. 2019, 38, 151–158. [Google Scholar] [CrossRef]
- Liu, J.; Peng, Z.H.; Li, Z.L.; Luo, W.Y.; Yang, X.S. Measurement and modeling of sound propagation over continental slope in the South China Sea. J. Acoust. Soc. Am. 2020, 147, 209–214. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Li, Z.L.; Liu, R.Y. Sound propagation in shallow water with periodic rough bottom. Acta. Phys. Sin. 2021, 70, 034302. [Google Scholar]
- Li, N.S.; Zhang, M.H.; Gao, B. Horizontal correlation of long-range bottom reverberation in shallow sloping seabed. J. Mar. Sci. Eng. 2021, 9, 414. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean. In Acoustics; Springer: New York, NY, USA, 2011; pp. 38–50, 457–527. [Google Scholar]
- Collins, M.D.; Cederberg, R.J.; King, D.B.; Chin-Bing, S.A. Comparison of algorithms for solving parabolic wave equations. J. Acoust. Soc. Am. 1996, 100, 178–182. [Google Scholar] [CrossRef]
- Collins, M.D. A split-step padé solution for the parabolic equation method. J. Acoust. Soc. Am. 1993, 93, 1736–1742. [Google Scholar] [CrossRef]
- Collins, M.D. Generalization of the split-step Padé solution. J. Acoust. Soc. Am. 1994, 96, 382–385. [Google Scholar] [CrossRef]
- Collins, M.D. User’s Guide for RAM Versions 1.0 and 1.0 p; Naval Research Lab: Washington, DC, USA, 1995. [Google Scholar]
- Li, G.X.; Yang, Z.G.; Liu, Y. Genetic Environment Map of Sediment in the East China Sea; Science Press: Beijing, China, 2005; p. 76. [Google Scholar]
- Hamilton, E.L. Geoacoustic modeling of the sea floor. J. Acoust. Soc. Am. 1980, 68, 1314–1340. [Google Scholar] [CrossRef]
- Li, Z.L.; Zhang, R.H.; Peng, Z.H.; Li, X.L. Abnormal attenuation of sound caused by horizontal variation of seabed acoustic characteristics. Sci. Sin. Phys. Mech. Astronomica. 2004, 34, 247–256. [Google Scholar]
- Zhou, J.X.; Zhang, X.Z.; Rogers, P.H.; Simmen, J.A.; Dahl, P.H.; Jin, G.L.; Peng, Z.H. Reverberation vertical coherence and sea-bottom geoacoustic inversion in shallow water. IEEE J. Ocean. Eng. 2005, 29, 988–999. [Google Scholar] [CrossRef]
- Porter, M.B. Beam tracing for two- and three-dimensional problems in ocean acoustics. J. Acoust. Soc. Am. 2019, 146, 2016–2029. [Google Scholar] [CrossRef] [PubMed]
- McCammon, D.F. Fundamental relationships between geoacoustic parameters and predicted bottom loss using a thin layer model. J. Geophys. Res. 1988, 93, 2363–2369. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MFS | FS | VFS | TS | YS | |
|---|---|---|---|---|---|
| Sound velocity (m/s) | 1800 | 1749 | 1702 | 1646 | 1630 |
| Density (g/cm3) | 1.95 | 1.94 | 1.86 | 1.77 | 1.76 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Li, Z.; Wang, G.; Liu, Y. Sound Propagation with Undulating Bottom in Shallow Water. J. Mar. Sci. Eng. 2021, 9, 1010. https://doi.org/10.3390/jmse9091010
Liu D, Li Z, Wang G, Liu Y. Sound Propagation with Undulating Bottom in Shallow Water. Journal of Marine Science and Engineering. 2021; 9(9):1010. https://doi.org/10.3390/jmse9091010
Chicago/Turabian StyleLiu, Dai, Zhenglin Li, Guangxu Wang, and Yunfeng Liu. 2021. "Sound Propagation with Undulating Bottom in Shallow Water" Journal of Marine Science and Engineering 9, no. 9: 1010. https://doi.org/10.3390/jmse9091010
APA StyleLiu, D., Li, Z., Wang, G., & Liu, Y. (2021). Sound Propagation with Undulating Bottom in Shallow Water. Journal of Marine Science and Engineering, 9(9), 1010. https://doi.org/10.3390/jmse9091010