1. Introduction
In the development and utilization of renewable marine energy, tidal current energy [
1,
2] and wave energy [
3] are not only a research focus with high technological maturity but are also a hotspot of engineering applications. The two are inseparable and have an integrated effect. For example, suspended tidal turbines can obtain tidal current energy at large velocities near the sea, but are also affected by surface waves. Ethan et al. [
4] studied the influence of surface gravity waves on the performance of tidal current turbines. The results showed that waves yield a small increase in turbine performance which can be explained by Stokes drift velocity. Lu et al. [
5] analyzed the performance influence of vertical axis tidal current turbines under waves and tidal currents through experiments, and proved that the presence of waves increased the output power of tidal current turbines and improved their power generation performance. The tidal energy turbine designed by Wang et al. [
6] from Shanghai Ocean University increased the absorbed power by 23 W under the combined action of waves and tidal currents compared with that under the same flow conditions, and the energy acquisition efficiency was increased by one percentage point. Therefore, the integration and collaboration of wave energy and tidal current energy into the same operating system can strengthen the multi-energy interconnection, promote the complementary advantages of multiple energy sources, improve the power generation per unit volume of sea area, and output a more stable performance. It can reduce the use of standby power generation equipment in renewable energy power generation, which not only reduces costs but is also beneficial for environmental protection.
Domestic and foreign scholars have conducted a great deal of research on the combined action mechanism of tidal current energy and wave energy. In 1987, Hedges [
7] formally proposed the concept and preliminary structure of wave and tidal current integrated power generation, and integrated power generation technology began to develop. With the development of research technology, various types of wave and tidal current energy integration devices are emerging. Omar et al. [
8] carried out research on wave-tidal current interaction theory and power generation technology, as well as many prototype experiments. Draycott et al. [
9] carried out a nonlinear wave load test of a horizontal axis tidal current turbine and studied the influence of waves on tidal current turbines by using a 1:15 scale pool model. However, the development of wave and tidal current integration technology in China has lagged behind that of other countries [
10,
11]. In 2011, Shanghai Ocean University first proposed an integrated wave-tidal current power generation scheme and developed an integrated marine wave-tidal current power generation device with a single-unit capacity of no less than 500 W [
12]. However, a complete theoretical system of resource evaluation and the mechanism of wave-tidal current integration have not been established. There are still problems such as the low energy conversion efficiency and poor reliability of wave-tidal current integrated power generation devices, and there are still numerous hurdles to clear before the large-scale promotion and application of such devices [
13,
14]. Therefore, the research on the mechanism of wave-current integration is of great significance for the improvement of the energy harvesting efficiency of the wave-tidal current integrated power generation turbine.
Many studies show that horizontal axis blades of tidal current turbines have a higher power generation efficiency and self-starting performance than turbines with vertical axis blades [
15,
16,
17,
18]. In the design of a horizontal axis tidal current energy turbine, a variable-pitch turbine can adapt to changes in tidal current velocity and direction by adjusting the blade declination to improve the self-starting performance and energy acquisition efficiency of the turbine [
19,
20]. However, most variable-pitch turbines do not consider the role of wave integration in the design process of blade motion law, and actual sea conditions are more complex than a single tidal current. Therefore, improving the energy efficiency of variable-pitch turbines under the action of wave-tidal current integration remains a challenge, and the posture change law of the turbine should be designed according to the characteristics of wave-tidal current integration. International scholars have conducted limited research on the variable posture law of horizontal axis turbines under wave-tidal current combined action. At the same time, for a determined sea area, tidal currents and waves have certain rules. The tidal current has strong periodicity, and waves also show certain cyclical fluctuation with the seasons [
21]. The data have a strong correlation in the time scale, but the time series of waves and tidal currents are nonlinear, and a simple linear regression method cannot be used for prediction. It is necessary to select a more effective prediction model according to the characteristics of waves and tidal currents parameters to predict the variation of waves and tidal currents and provide a reference for the design of blade motion law.
In this paper, we propose a design method of blade motion law based on the prediction of the change law of waves and tidal currents, so that the horizontal axis turbine can achieve the maximum energy harvesting efficiency at different times and under different working conditions. We take the S-foil bidirectional energy harvesting horizontal axis turbine as the study object and Lianyungang port as the practical application scenario. Through an analysis of the open tidal current and wave data from the past year, the neural network prediction model of wave (mean wave direction, mean wave period, and significant wave height) and tidal current (velocity and direction) data is constructed to predict the change law of waves and tidal currents within 24 h after the existing data cutoff point. On this basis, a mathematical model of the mechanism of wave-tidal current integration is deduced and established. Since the turbine mainly captures the kinetic energy generated by the lateral inflow, the complex mechanism of wave-tidal current integration is simplified in this paper, and the wave-tidal current integration is converted into an equivalent tidal current velocity vector so that forces on the turbine in all directions are integrated into the lateral force to better study the hydrodynamic performance of the horizontal axis turbine. This equivalent vector is related to tidal current velocity, tidal current direction, mean wave direction, mean wave period, and significant wave height. Then, the conversion coefficient of waves and equivalent flows is determined by numerical wave tank experiments, and the equivalent velocity range of wave-tidal current integration in Lianyungang port is determined. Finally, the influence of different blade deflection angles on the energy harvesting efficiency of the turbine under different flow conditions is studied by the CFD method to determine the variable attitude law of the turbine, which is verified in a sea trial experiment. Compared with the S-foil horizontal axis turbine previously designed by our research group [
22], the variable-pitch turbine proposed in this paper adopts the blade motion law designed based on the prediction of the change law of waves and tidal currents, which not only ensures the acquisition of tidal current energy, but also integrates the wave energy, so that the energy acquisition efficiency under the same flow condition is increased by about 10%. In addition, this study provides a new method for the engineering design of new marine energy development and utilization, and provides a new idea for the improvement of power generation efficiency.
This paper is organized as follows. The prediction of the change law of waves and tidal currents according to the existing data of Lianyungang is presented in
Section 2. The mathematical mechanism of wave-tidal current integration according to the physical characteristics of wave and tidal current is presented in
Section 3. The blade motion law of the turbine is studied in
Section 4, together with the details of CFD simulations.
Section 5 shows the sea trial results of the prototype turbine. Finally, the conclusions of this paper are presented in
Section 6.
3. Mathematical Mechanism of Wave-Tidal Current Integration
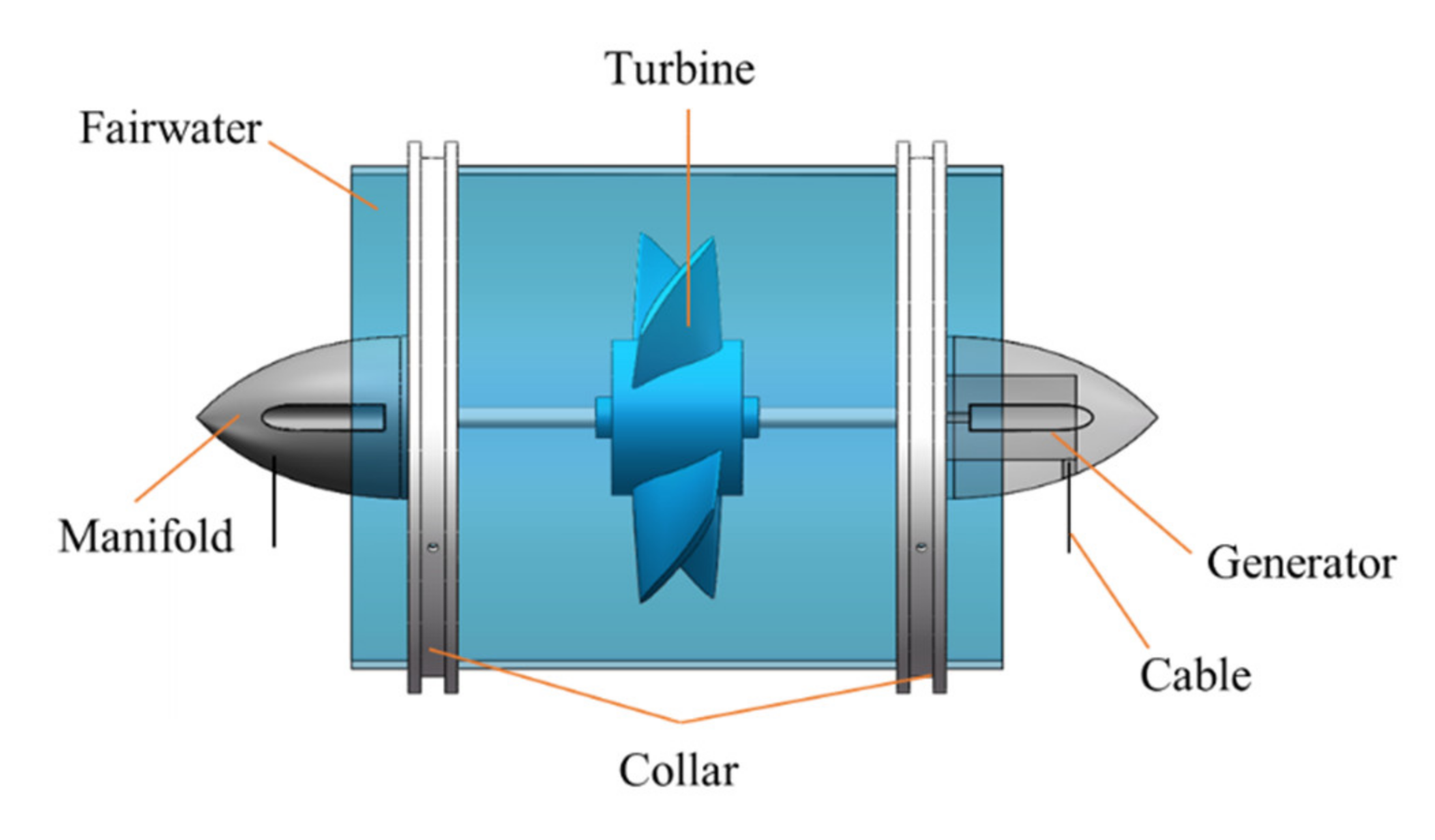
The research in this paper is based on the S-foil bidirectional energy harvesting marine power turbine developed by our research group. The prototype structure is shown in
Figure 4. The turbine can work under bidirectional flow to achieve bidirectional energy harvesting. The energy of the combined action of waves and tidal currents in the turbine is always perpendicular to the rotating plane of the turbine. In the design process of the turbine posture change law, calculating the equivalent vector of the wave and tidal current integration energy will make the theoretical design of the turbine posture change law more targeted and convenient.
Furthermore, wave-tidal current coupling is a relatively complex physical process. Therefore, in this paper, the actual working conditions of waves and tidal currents are appropriately idealized, and the complex wave-tidal current coupling process is simplified as a linear superposition mathematical model to integrate the input energy of waves and tidal currents acting on the turbine. This not only fully considers the integration of the two energies but also makes the derivation process simpler.
3.1. Wave Energy
Many existing studies simplify the actual wave condition as a linear wave to calculate wave energy, but the sea conditions in different sea areas are different. It is necessary to determine the applicable wave theory of Lianyungang port according to the values of
and
to calculate the corresponding wave energy [
26]. The water depth of Lianyungang port (34.8N, 119.4E) is approximately 14 m according to the China Port Network. Significant wave height, mean wave period, and mean wave direction corresponding to this position were obtained from the ERA5 reanalysis database, and the time resolution is an hour. When significant wave height and the mean wave period of 2018–2021 are introduced into
and
, the obtained values are 0.0037 and 0.0817 respectively, which is in line with the applicable scope of the Stokes second-order nonlinear wave theory. Therefore, the Stokes second-order nonlinear wave theory is taken as the theoretical waveform of Lianyungang port to solve the wave energy. Equations (6)–(11) are the calculation formulas of the solution process [
27].
The dispersion relation of the Stokes second-order nonlinear wave is as follows:
The velocity potential function is as follows:
The wave surface equation is as follows:
The water particle movement velocity components are as follows:
where
,
d is the water depth (m),
H is the wave height (m),
T is the wave period (s),
L is the wavelength (m),
k is the wavenumber, and
w is the angular frequency (rad/s).
The energy of horizontal motion of wave particles acting on the turbine in unit wavelength is as follows:
Equations (6)–(10) can be substituted into Equation (11) to approximate the solution of wave energy using MATLAB software yields:
3.2. Equivalent Velocities of Waves and Tidal Currents
The tidal current energy calculation equation is as follows:
where
is the seawater density (kg/m
3) and
S is the flow area (m
2).
Since the wave energy does not entirely act on the turbine, the effective wave load acting on the turbine is transformed into the flow load under the same flow area through the equation, and the equivalent flow velocity corresponding to the wave energy is calculated. The wave energy in the unit wavelength is written as the form of tidal current energy:
where the coefficient
represents the proportion of the wave energy actually acting on the turbine. The equivalent tidal current velocity,
, of wave energy per unit wavelength acting on the turbine is expressed as follows:
The equivalent velocity is superimposed on the tidal current velocity,
, at this position to obtain the combined velocity,
, of wave-tidal current integration. The vector form of the tidal current velocity and the equivalent velocity of a wave is expressed as follows:
where
and
represent the wave direction angle and tidal current direction angle, respectively.
The velocity vector of wave-tidal current integration is as follows:
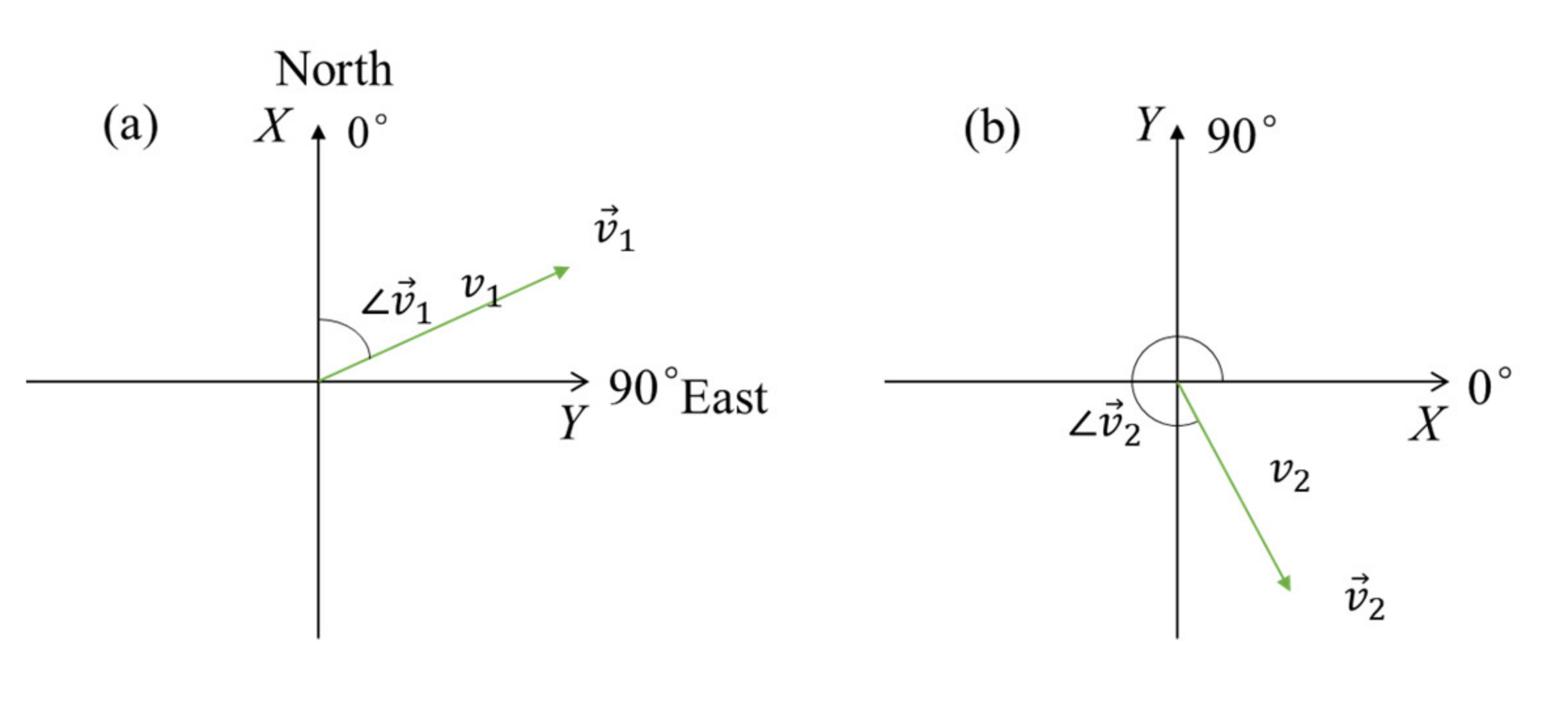
The transformation of the coordinate system between the two-dimensional geographic coordinate system and the mathematical rectangular coordinate system
XOY is carried out as shown in
Figure 5. In the figure, (a) is the coordinate system of the combined velocity vector integrating waves and tidal currents, and (b) is the mathematical rectangular coordinate system
XOY. In the coordinate system in
Figure 5a, due north (positive direction of the
X axis) is at 0 degrees, and due east (positive direction of the
Y axis) is at 90 degrees.
As shown in
Figure 5, in coordinate system (a), the vertical axis is the
X-axis, the horizontal axis is the
Y-axis, and the positive direction of the angle is clockwise. In coordinate system (b), the vertical axis is the
Y-axis, the horizontal axis is the
X-axis, and the positive direction of the angle is counterclockwise. A vector of angle
and length
l in frame (a) corresponds to a vector of angle
and length
l in frame (b), and the two vectors are projected with the same sign on the
X-axis in their respective coordinates and an opposite sign on the
Y-axis.
The velocity vector is substituted into the coordinate transformation relationship, as shown in
Figure 6, where
and
. In frame (b), the projection of the velocity vector,
, in the x direction is
, and the projection of the velocity vector in the
y direction is
. Corresponding to frame (a), the projection length of the velocity vector,
, in the x direction is
, and the projection length in the
y direction is
.
According to the above transformation relation, the two velocity vectors of tidal currents and waves are decomposed in the coordinate system (b) as shown in Equation (19):
The combined vector is converted to coordinate system (a) by using the conversion relationship, and the integrated velocity vector in the real geographical coordinate system is obtained as shown in Equation (20):
3.3. Wave Equivalent Velocity Coefficient
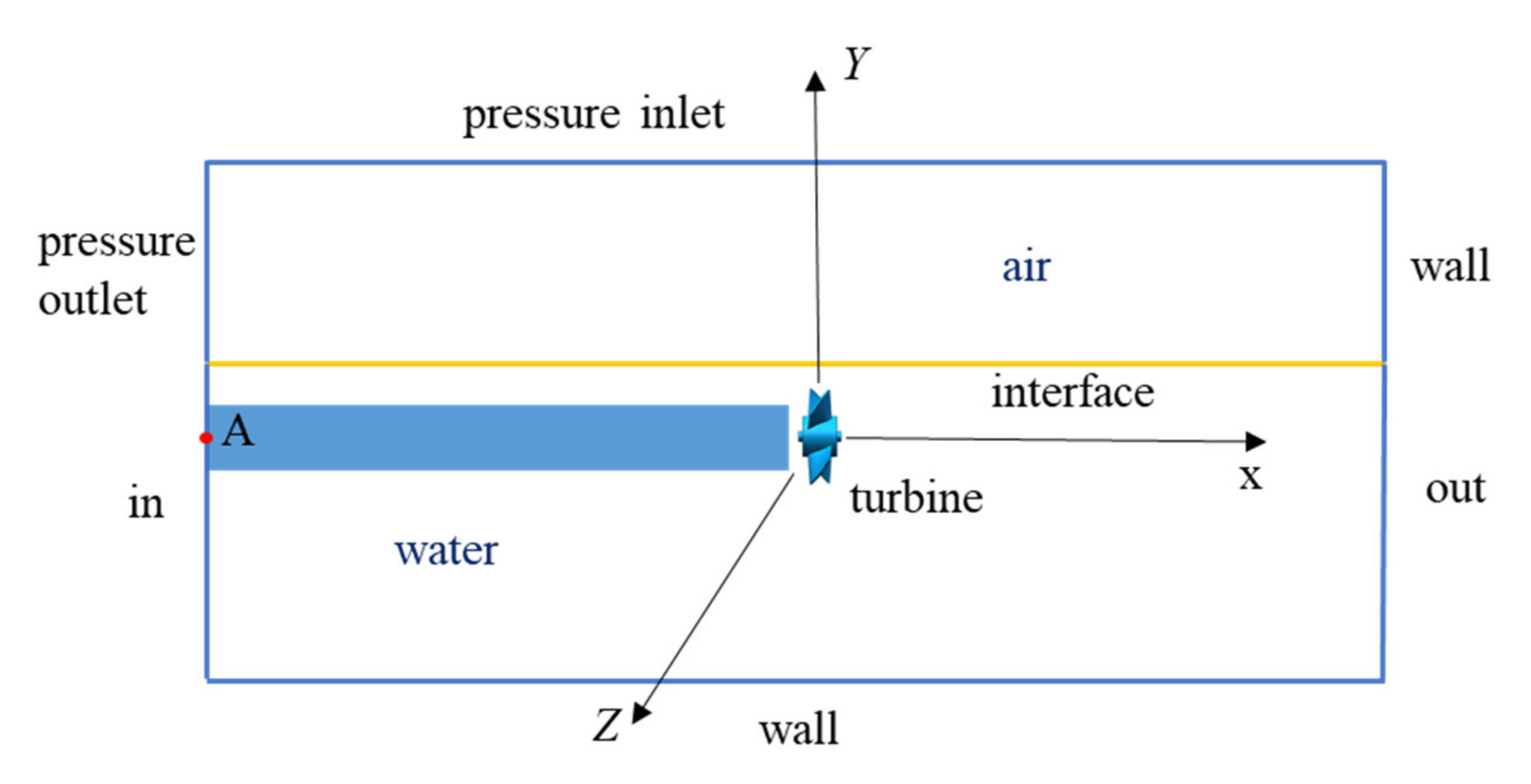
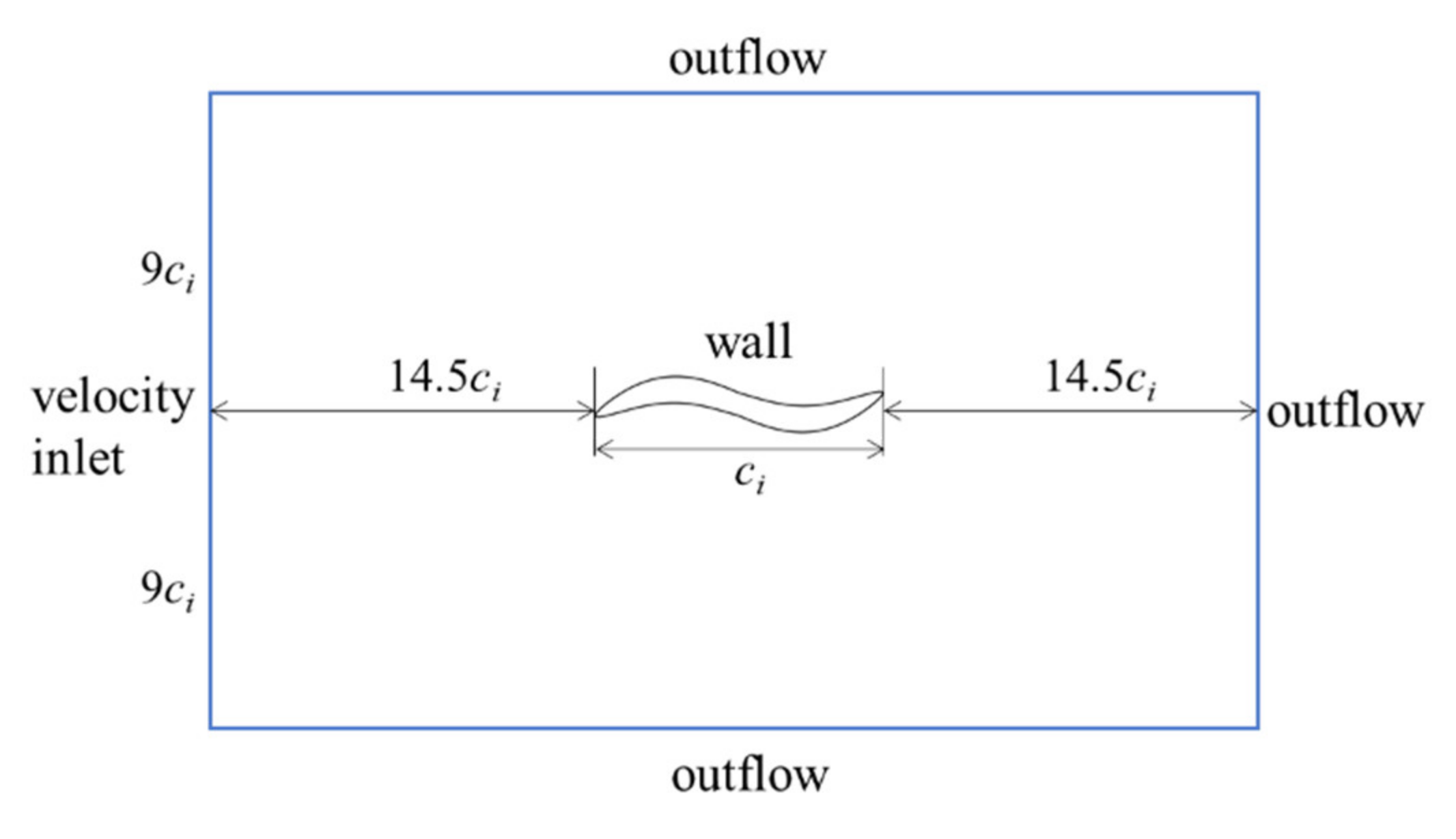
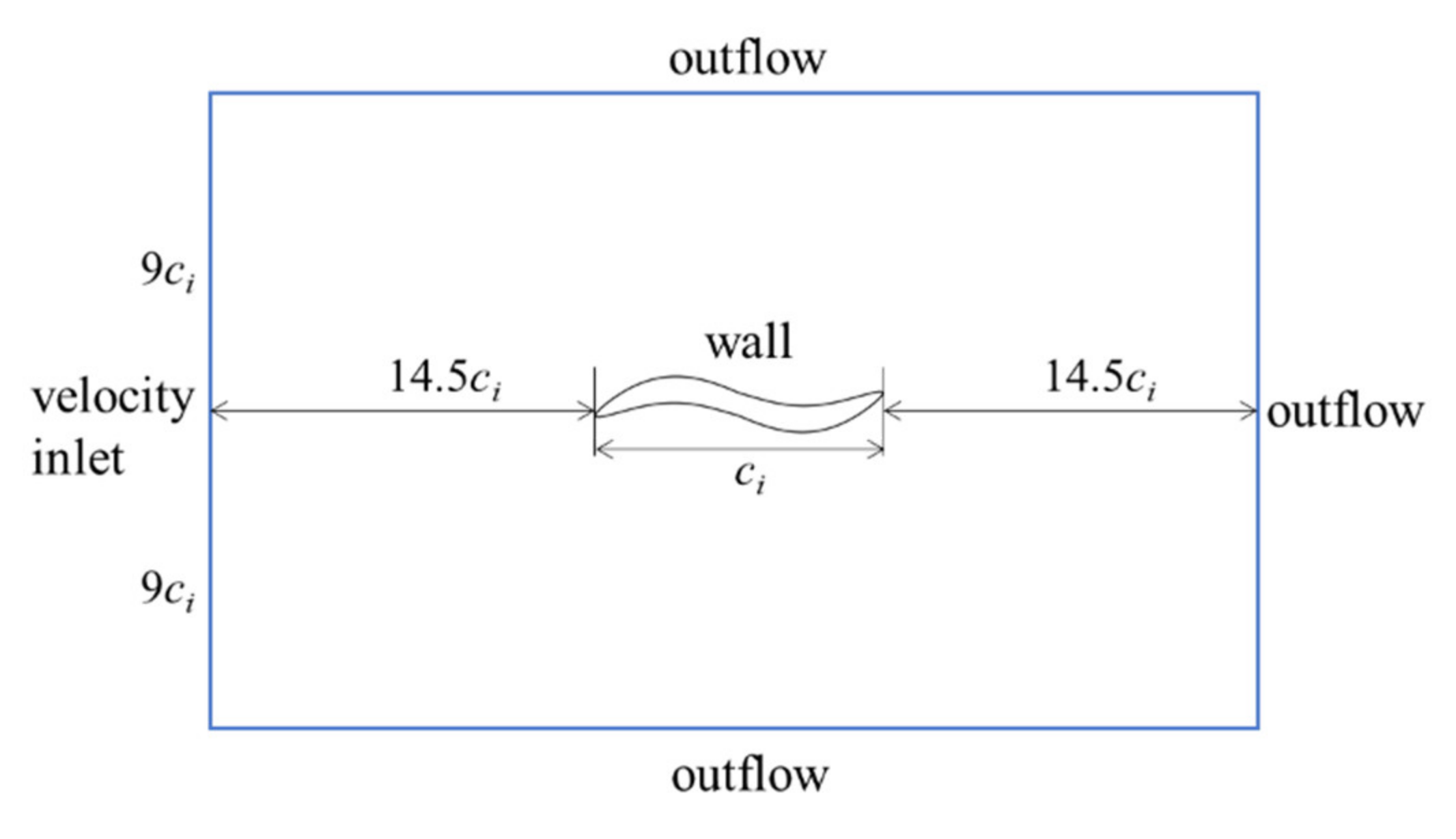
A three-dimensional numerical wave tank was established in Fluent, and its two-dimensional section diagram and boundary conditions are shown in
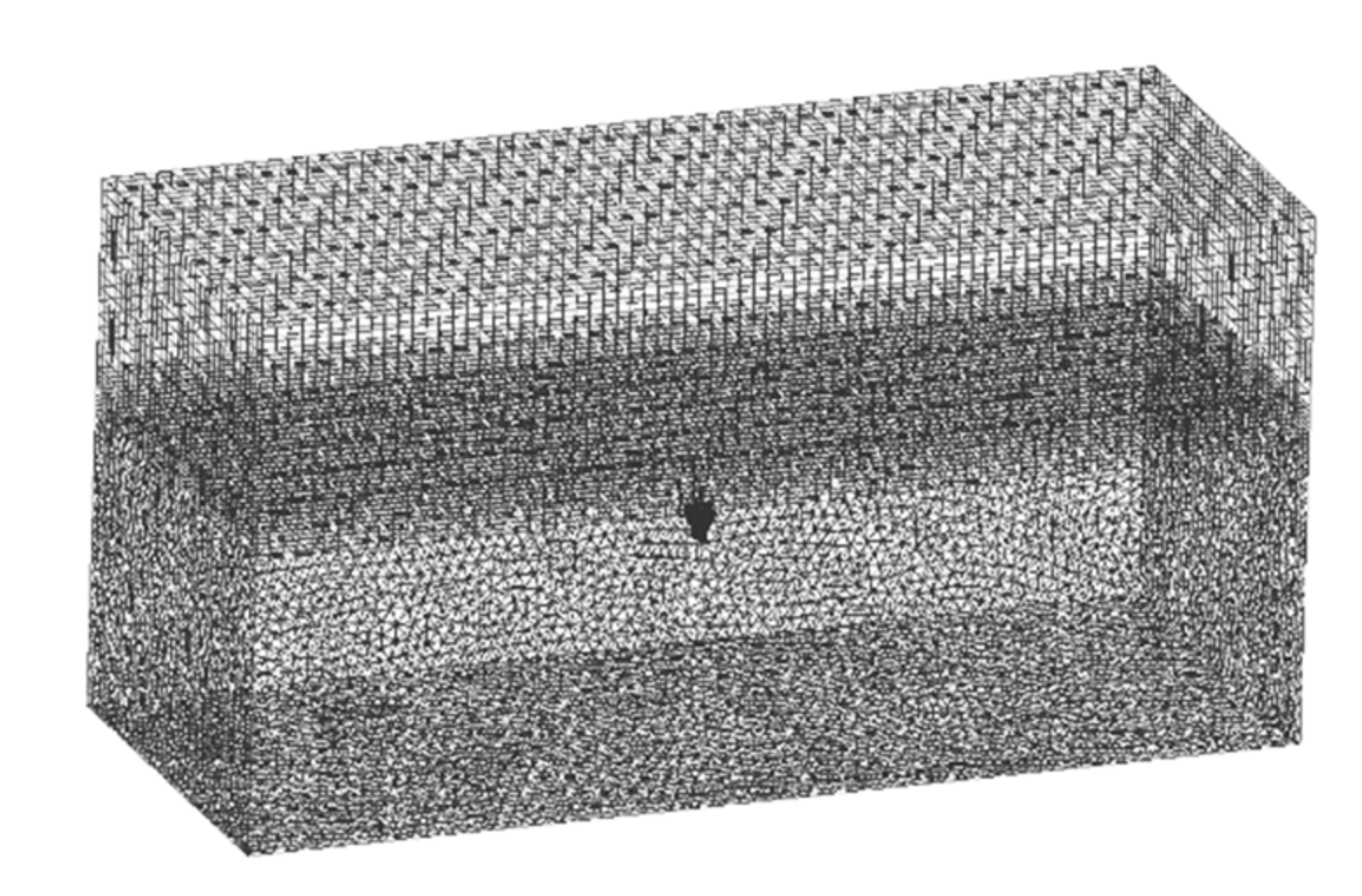
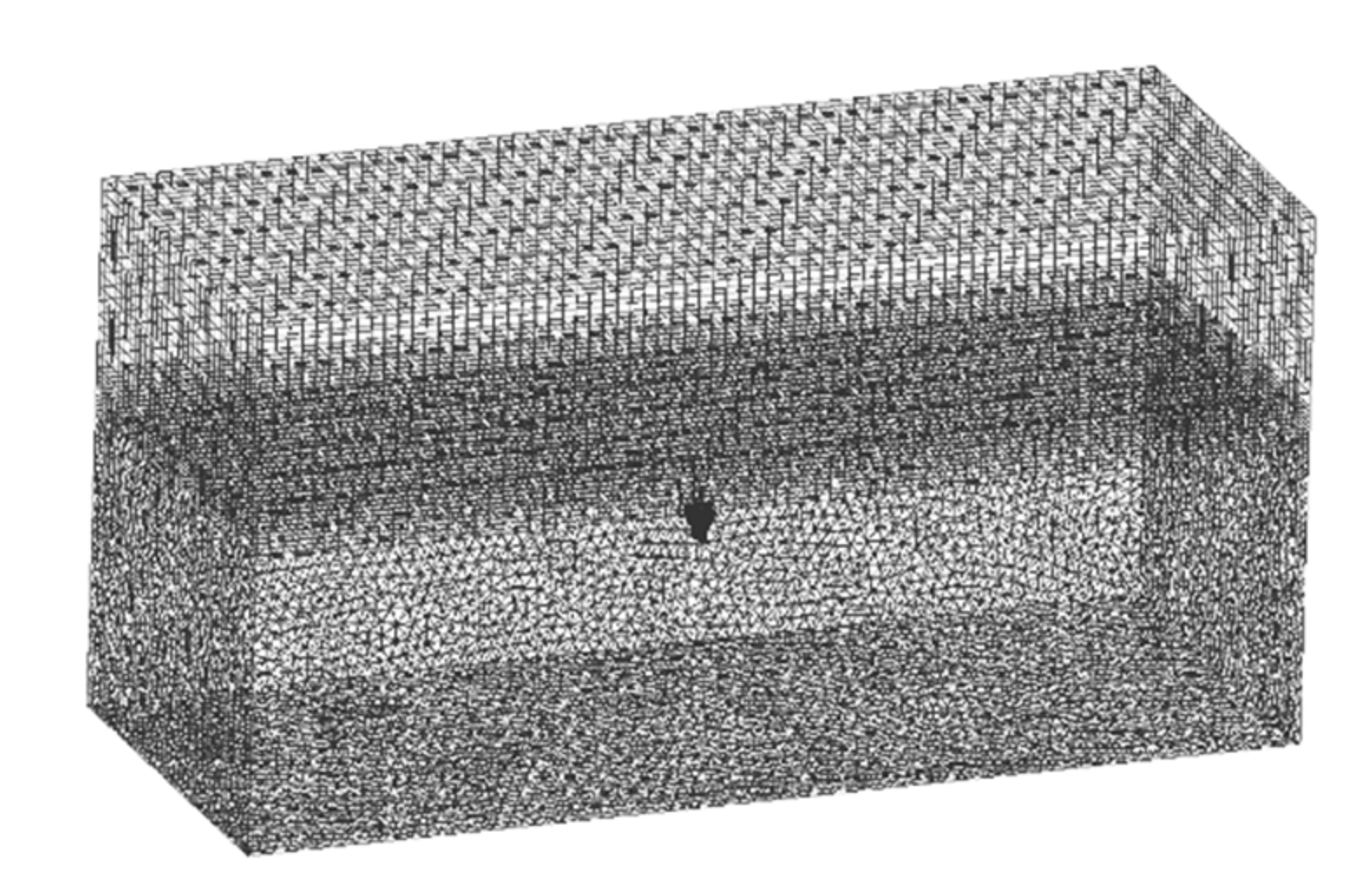
Figure 7. The total grid calculation domain is a rectangular domain with a length of 12D, a width of 6D, and a height of 10D, which is divided into two calculation domains: the air domain and the wave domain. The height ratio of the wave grid calculation domain to the air domain is 3:2. The shape of the air domain is regular compared with that of the wave grid calculation domain. Therefore, the air domain was divided by sweeping grids, and the wave grid calculation domain was divided by tetrahedral grids. When meshing, the size of the turbine wall grid was set to 2.5 mm, the minimum size of the global mesh was set to 0.35 mm, the maximum size of the global surface mesh was set to 35 mm, and the growth rate was set to 1.2. In order to capture the wave propagation of the free surface and the change of wave motion more accurately, the grid was encrypted in a wave height range above and below the static water surface along the wave height direction. The mesh height of the encrypted area was set to 0.1 times that of the wave height, the mesh size in the wavelength direction was set to 0.05 times that of the wavelength, and the mesh size in the width direction of the tank was consistent with the length direction. The total number of grids was 2,108,683, and the
Y + value was set to be less than 20. The computational grid model is shown in
Figure 8. To calculate the equivalent wave velocity, the Volume of Fluid (VOF) method was used to track the free surface. The Stokes second-order wave was selected. The wave period was set as 0.5 s, the wave height was set as 0.1 m, and the wavenumber was set as 1. According to Equation (6), the wavelength
L was obtained as 0.6 m. The Shear Stress Transfer (SST) k-omega turbulence model was chosen, and the pressure-implicit with the splitting of the operator (PISO) algorithm was used as the pressure-velocity coupling algorithm.
The blue part in
Figure 7 is the transfer area of wave action. The flow generated by the wave at the starting point was regarded as the equivalent flow of the wave. The velocity of the points in the direction of the
Z-axis at point A was calculated in CFD-Post, and the average value was taken as the equivalent flow velocity. The position and velocity of each point are shown in
Table 1. The average velocity of each point is 0.34 m/s. The wave energy conversion coefficient,
, can be calculated by Equations (14) and (15) to be approximately 7.48; thus, the coefficient of wave equivalent tidal current velocity can be further deduced.
The wave and tidal current data of Lianyungang port in the past year are substituted to obtain the equivalent velocity range of 0.1–1.2 m/s. Substituting the predicted data of tidal current velocity, tidal current direction, mean wave period, mean wave direction, and significant wave height in
Section 2.1 for the next 24 h into Equations (15)–(20), the integrated action velocity vector in the next 24 h can be predicted.
The integration of tidal current energy and wave energy simplifies the effect of complex sea water movement on the turbine into an equivalent velocity vector that varies with time. According to the change in the predicted equivalent velocity size to design the turbine blade motion law, and according to the predicted equivalent velocity direction to design the gesture change law of the turbine, the automatic control system of the blade motion power can be designed according to the obtained law, meaning that the maximum energy acquisition efficiency can be achieved over most of the day.
5. Sea Experimental Verification of Wave-Tidal Current Integration
The variable posture law of the hydraulic turbine prototype is verified, and the prototype parameters are shown in
Table 5.
The prediction model in
Section 2 was used to predict the integrated equivalent flow vector of waves and tidal currents for 19 June 2021. The prediction results are shown in
Table 6.
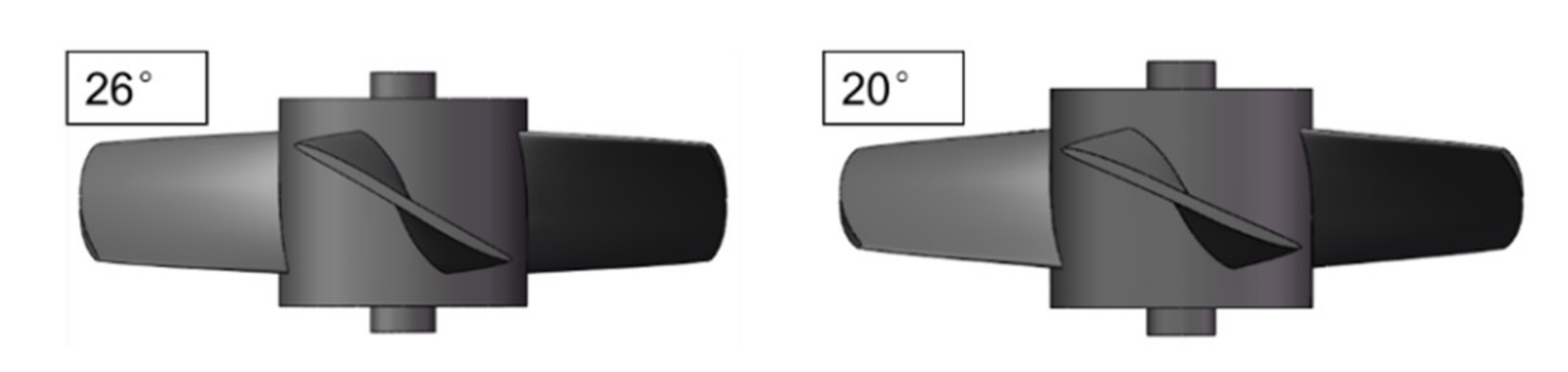
In the two time periods of 10:00–12:00 and 19:00–22:00, the integrated action speed was between 0.3 and 0.5 m/s. In combination with the environmental conditions, these two time periods could be selected for experiments. During the experiment, turbine models with blade twist angles of 26° and 20° were taken as the experimental group and the control group, respectively (
Figure 13). The experimental layout and the model sea trial site are shown in
Figure 14. The orientation of the device was adjusted according to the integrated action direction at different moments in
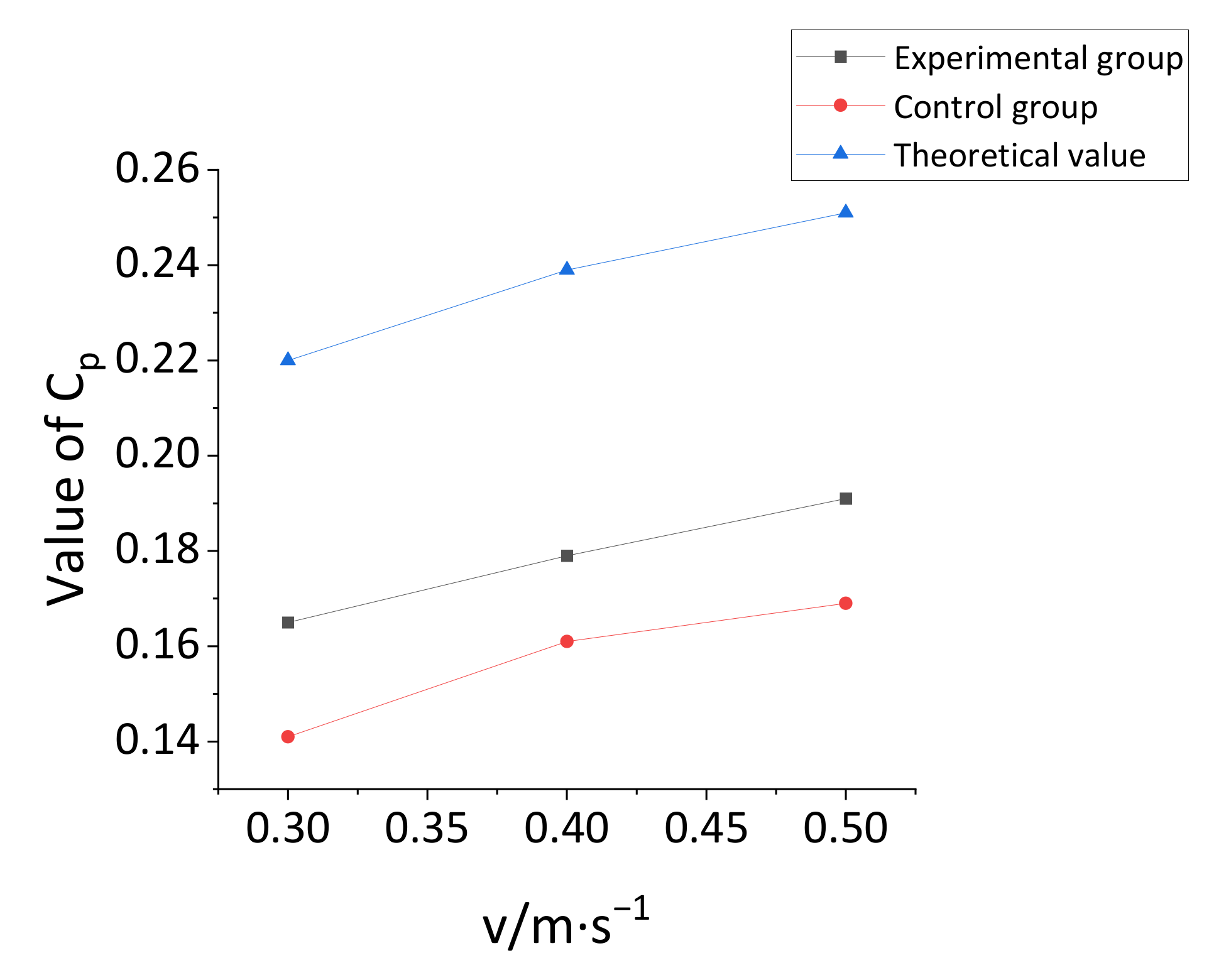
Table 6. With 60 s as the sampling period, the output voltage and current were collected, and the output power and its average were calculated. The power coefficients were calculated according to Equation (26). The calculation results are shown in
Figure 15. The chart shows that when the flow velocity is 0.3–0.5 m/s, the power coefficient of the experimental group (the blade twist angle is 26°) is greater than that of the control group (the blade twist angle is 20°), but it is still less than the theoretical maximum power coefficient. This is because the instability of the flow velocity in the actual sea test resulted in the instability of power generation, but their curve trends are consistent, which is in line with the conclusion of the blade motion law in
Section 4.2. Compared with the S-foil wave-tidal current integrated power turbine previously studied by our research team, the blade motion law of the turbine based on the prediction of the wave-tidal current law designed in this paper improves the energy harvesting efficiency of the turbine by about 10% under the same flow conditions.
6. Conclusions
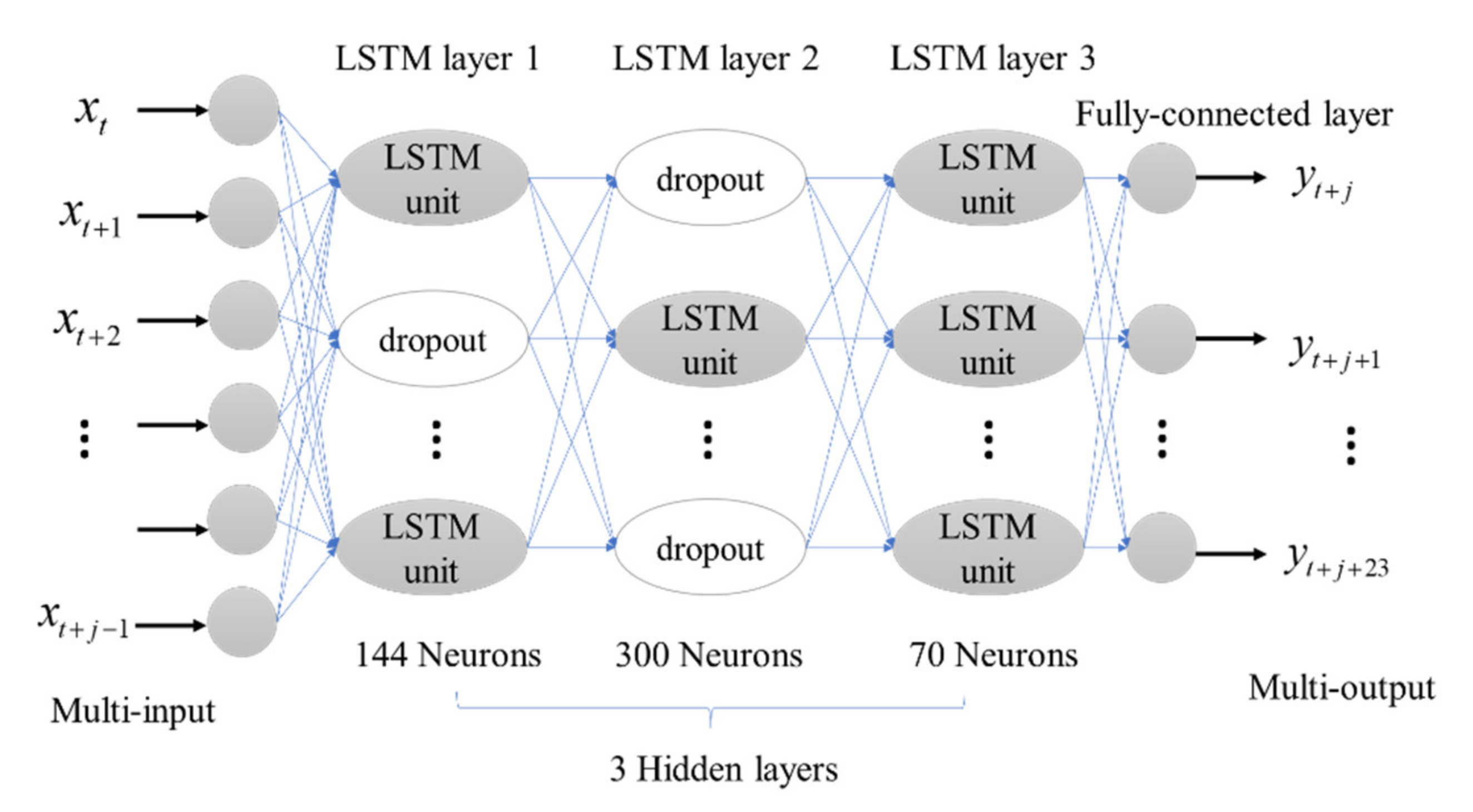
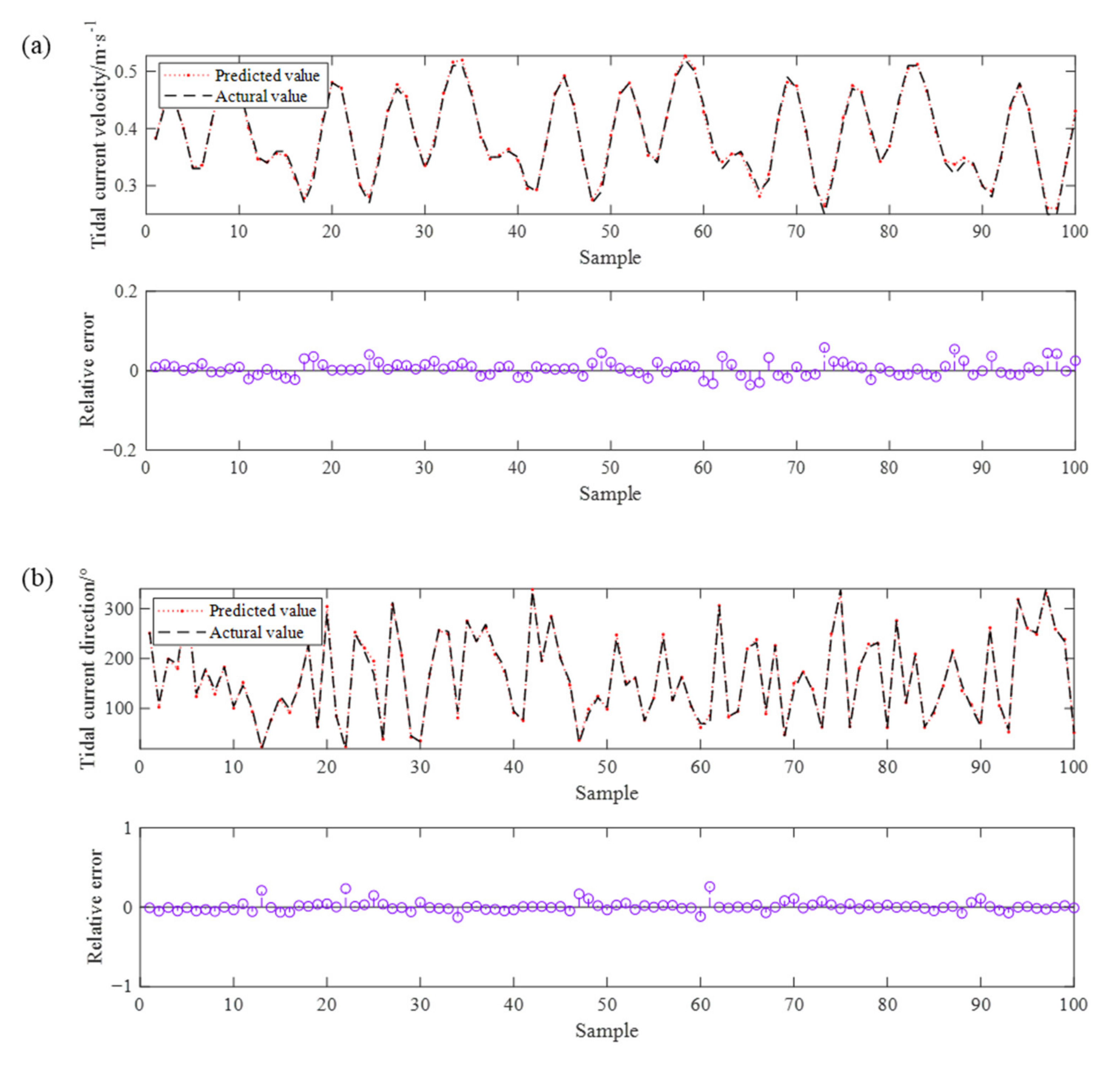
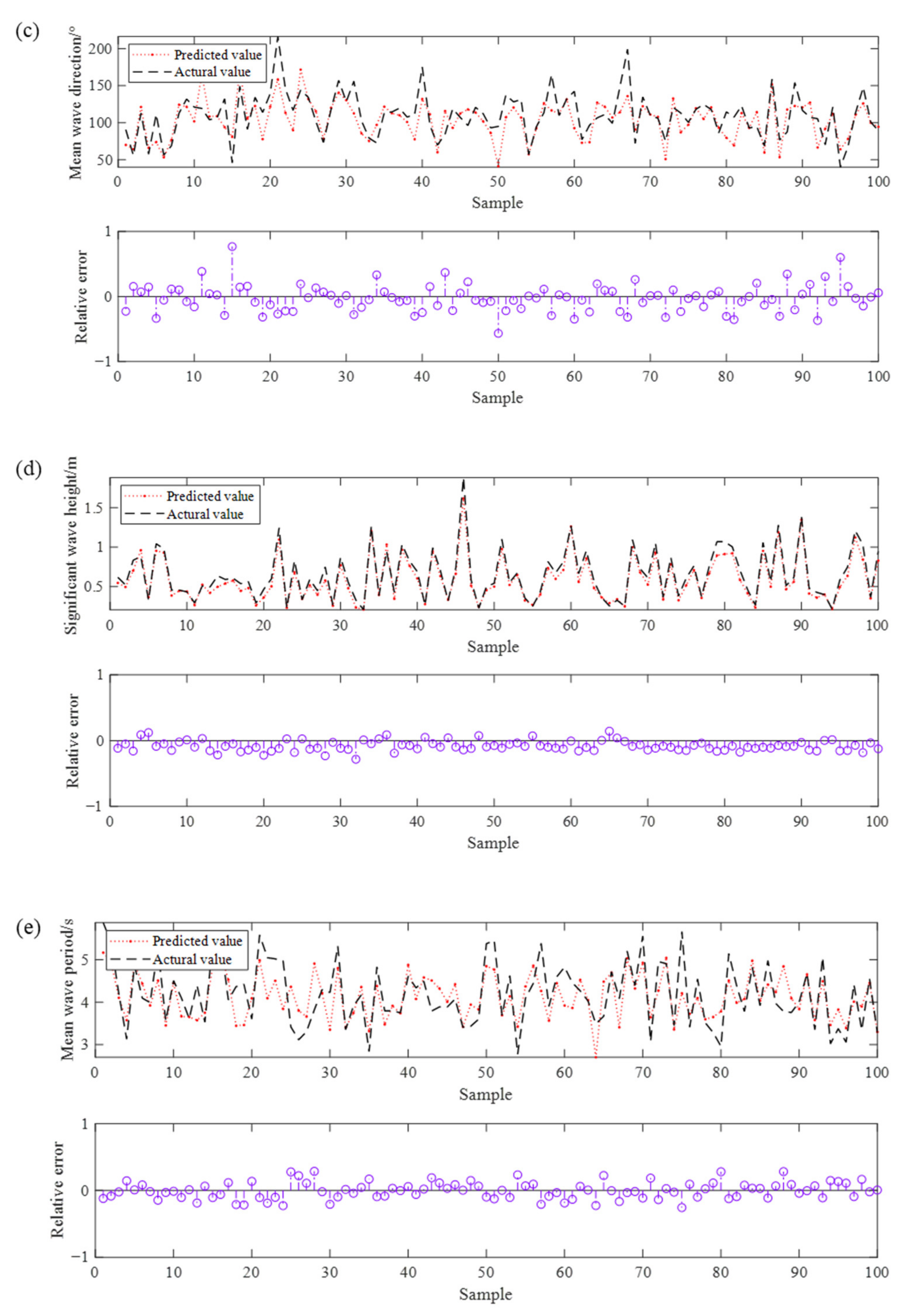
(1) The LSTM neural network prediction model was established for the five parameters (mean wave direction, mean wave period, significant wave height, tidal current velocity, and tidal current direction) of the measured station in the past year, and the data 24 h after the existing data cutoff point were predicted. The results showed that the prediction accuracies of the LSTM neural network model for these five marine parameters were greater than 90%, and the determination coefficients were greater than 90%, indicating that the LSTM model has a good prediction effect for marine parameters. The model can also be further used to predict other marine environmental parameters.
(2) We considered the actual working conditions of the S-foil bidirectional power-harvesting turbine in the process of deducing the mathematical mechanism of wave-current integration. The input energy of waves and tidal currents acting on the turbine was superimposed as an equivalent combined velocity vector. It was deduced that the combined velocity was a function of tidal current velocity, tidal current direction, mean wave period, mean wave direction, and significant wave height. In addition, the equivalent tidal current coefficient of the wave was determined to be 7.48 by using a three-dimensional numerical wave tank. This method not only simplifies the design of blade motion law of a horizontal axis turbine, but also provides a reference for the theoretical derivation of multi-energy integrated power generation.
(3) Through the three-dimensional numerical simulation of the turbine under different working conditions, the blade motion law was obtained. Furthermore, through the sea trial of the prototype turbine, the correctness of the variable posture law of the turbine was verified. When the integrated action speed was 0.3–0.5 m/s, the turbine with a blade torsion angle of 26° was more efficient than the turbine with a blade torsion angle of 20°, which was in line with the design conclusion of the blade motion law in
Section 4.2.
(4) The integrated velocity vectors in the next 24 h were predicted by combining the prediction data of five time series and the integrated wave-tidal current action combined vector function. The predicted data were applied to the design of the blade motion law and the rotation law of the turbine fuselage, which could effectively improve the hourly energy acquisition efficiency of the turbine in the working process. Compared with the S-foil wave-tidal current integrated power turbine previously studied by our research team, the blade motion law of the turbine blade based on the prediction of the wave-tidal current law designed in this paper improved the energy efficiency of the turbine by about 10% under the same flow conditions. Therefore, the design method of the blade motion law can provide a reference for improving the efficiency of hydraulic turbines in engineering.
In this study, through theoretical analysis and sea trial experiments, a blade motion law designed based on the prediction of the change law of waves and tidal currents was verified. This experimental method provides a new idea for improving the energy acquisition efficiency of power generation devices. The experimental results can also provide a reference for the engineering design for the development and utilization of new marine energy.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}