
Numerical Investigation on Hydrodynamic Performance of a Portable AUV


Abstract
:1. Introduction
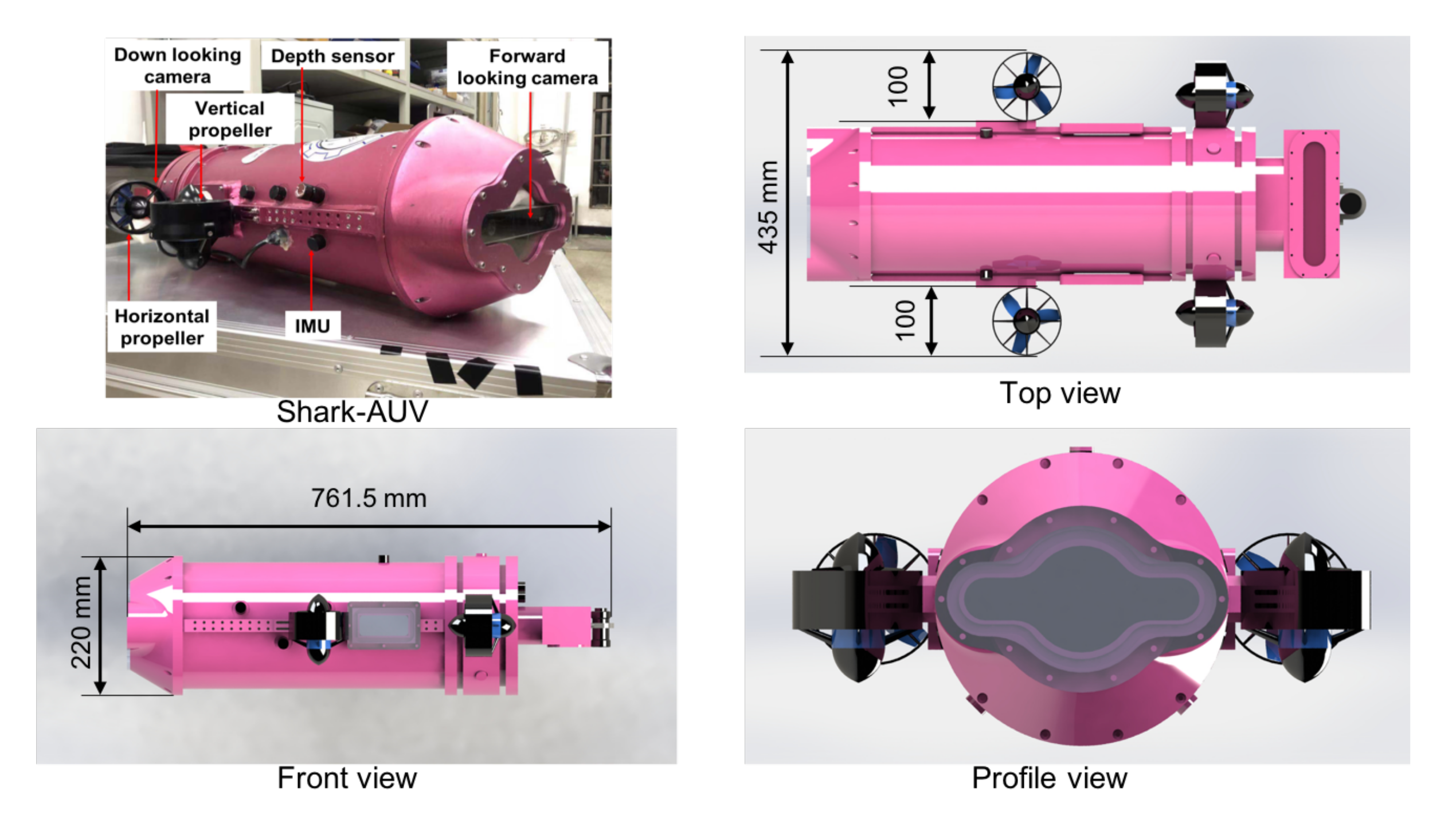
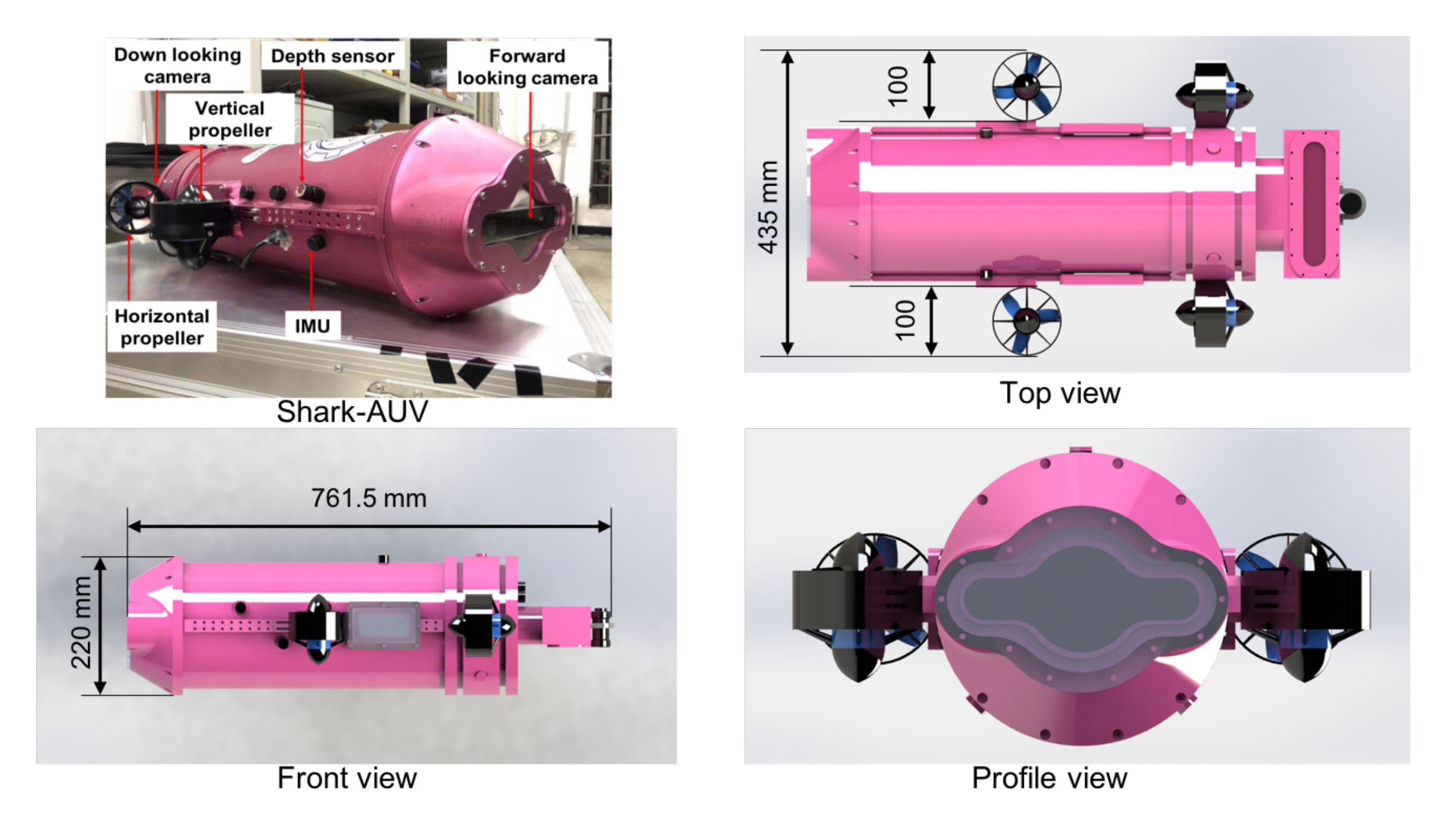
2. Mechanical Design and Problem Statement
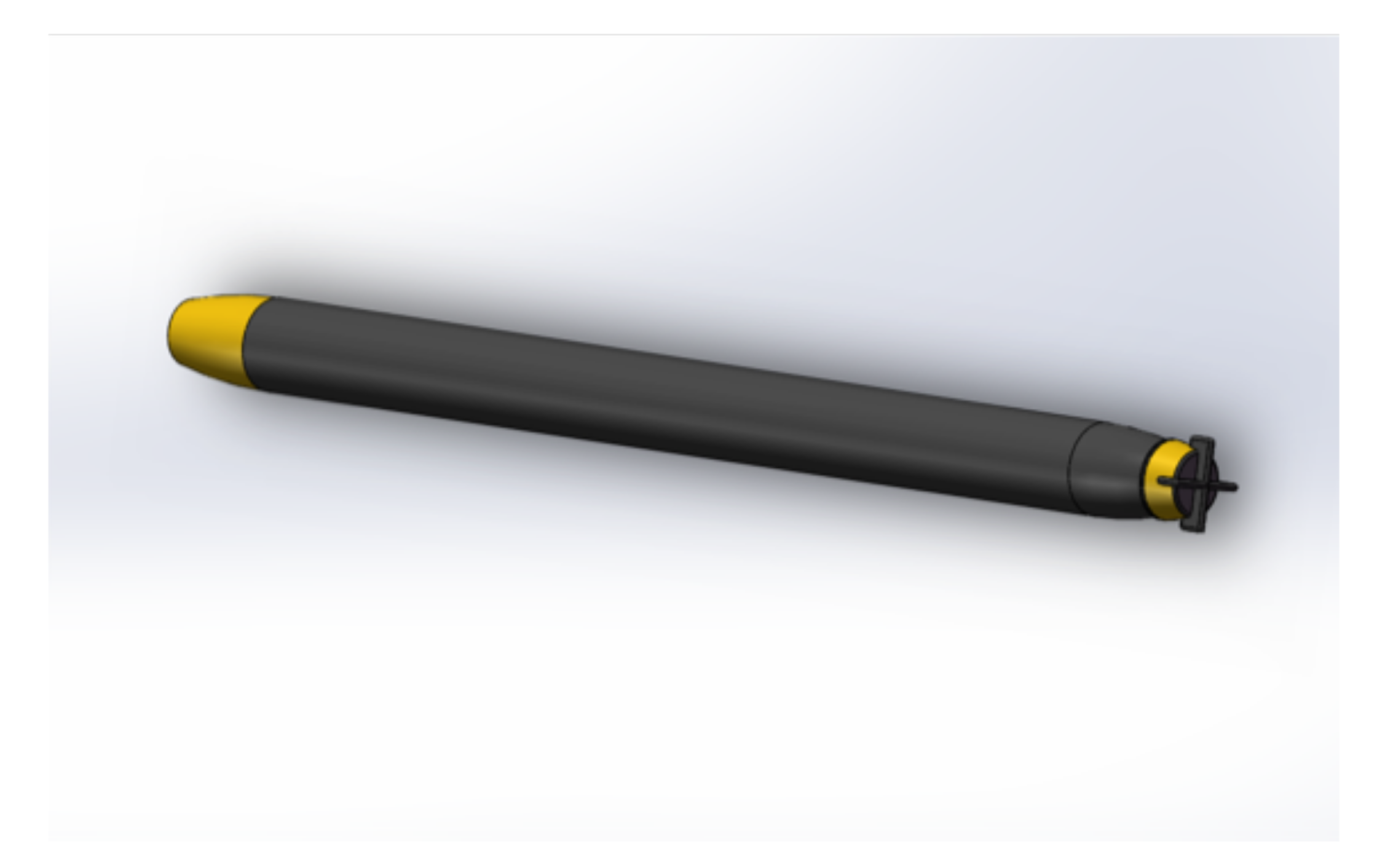
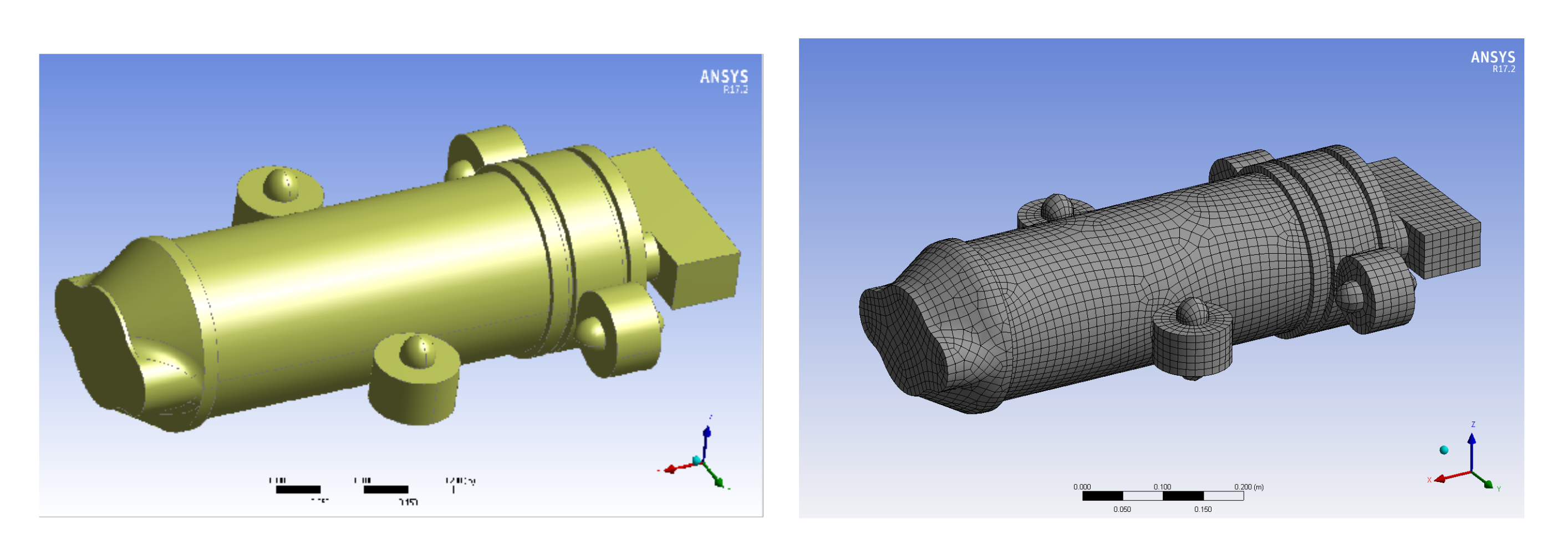
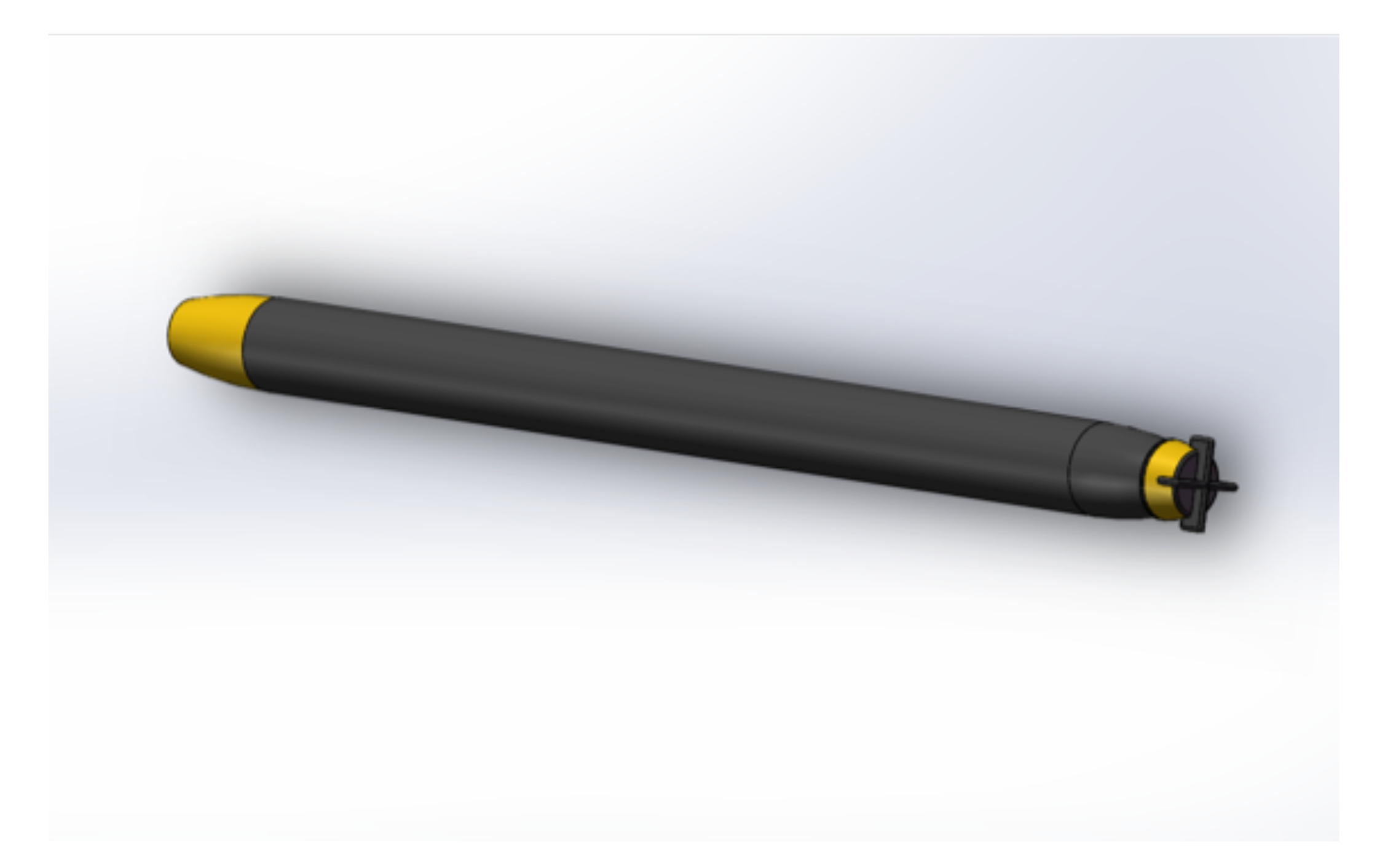
2.1. Overall Mechanical Structure
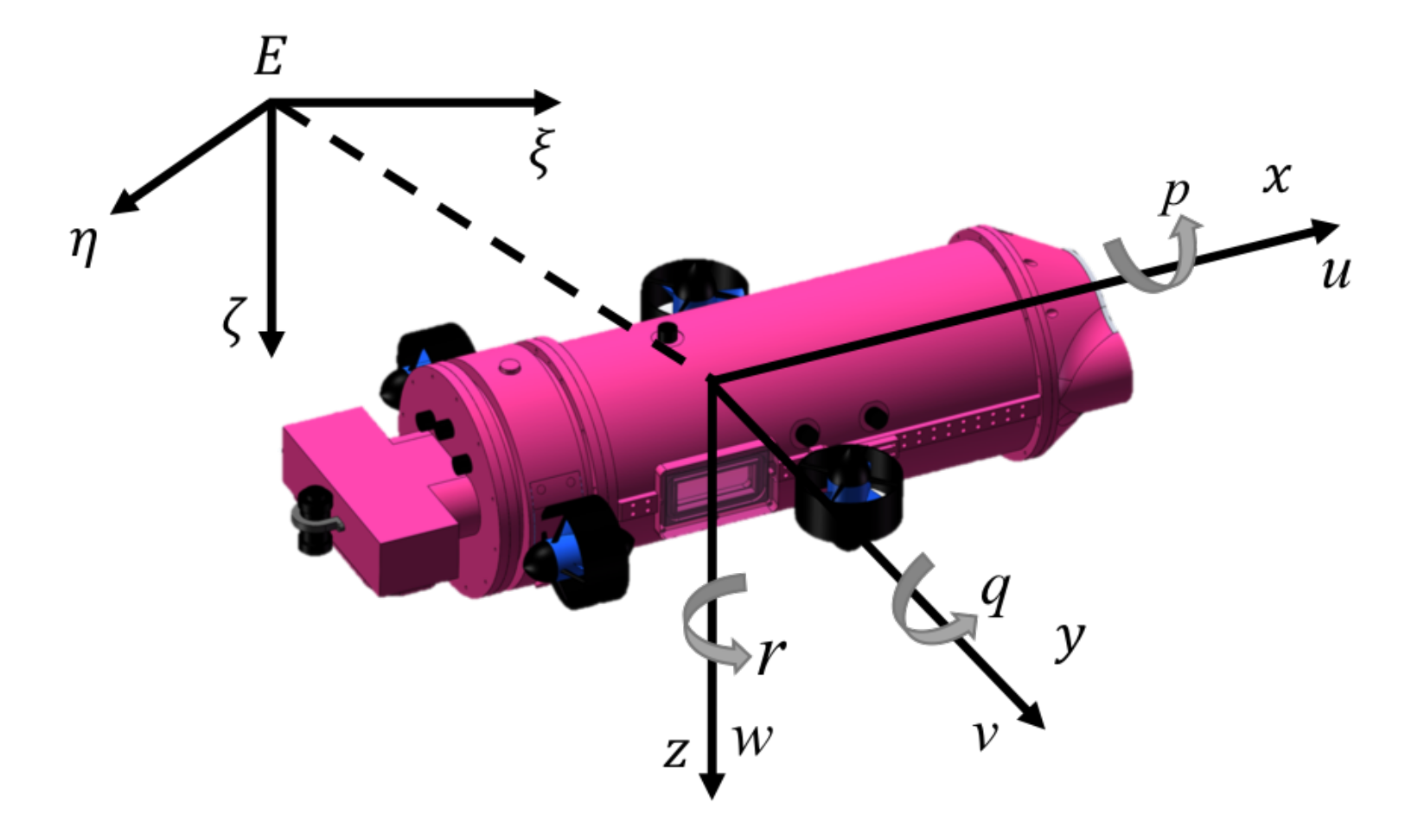
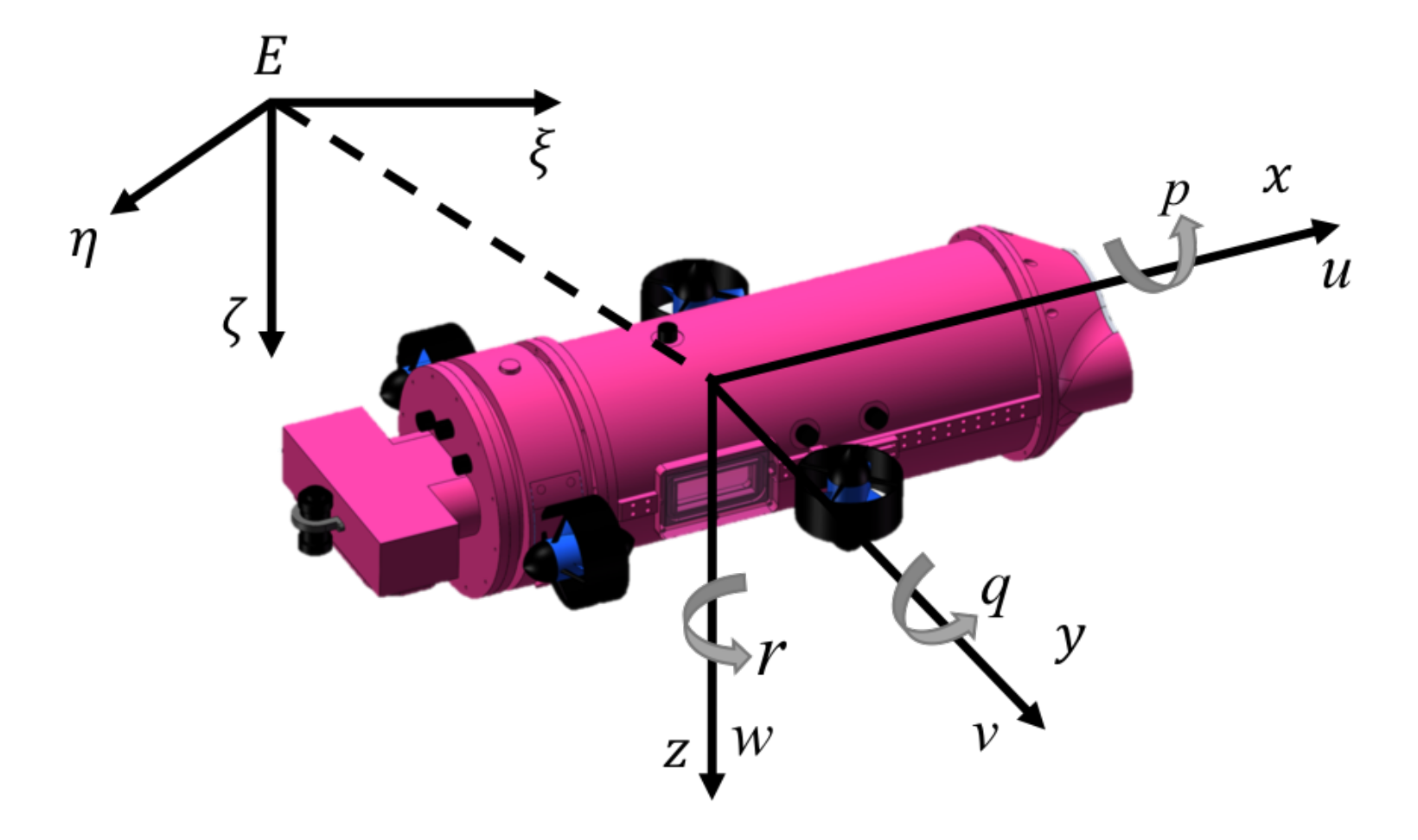
2.2. Equations of Motion
2.3. Equations of Motion with Unknown Hydrodynamic Coefficients
2.4. Problem Statement
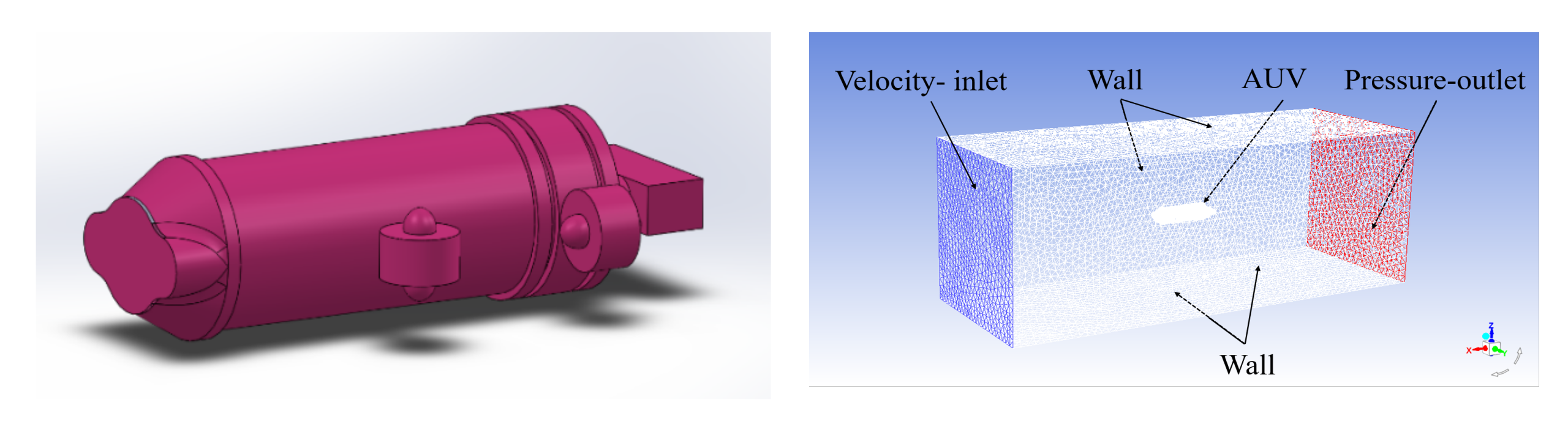
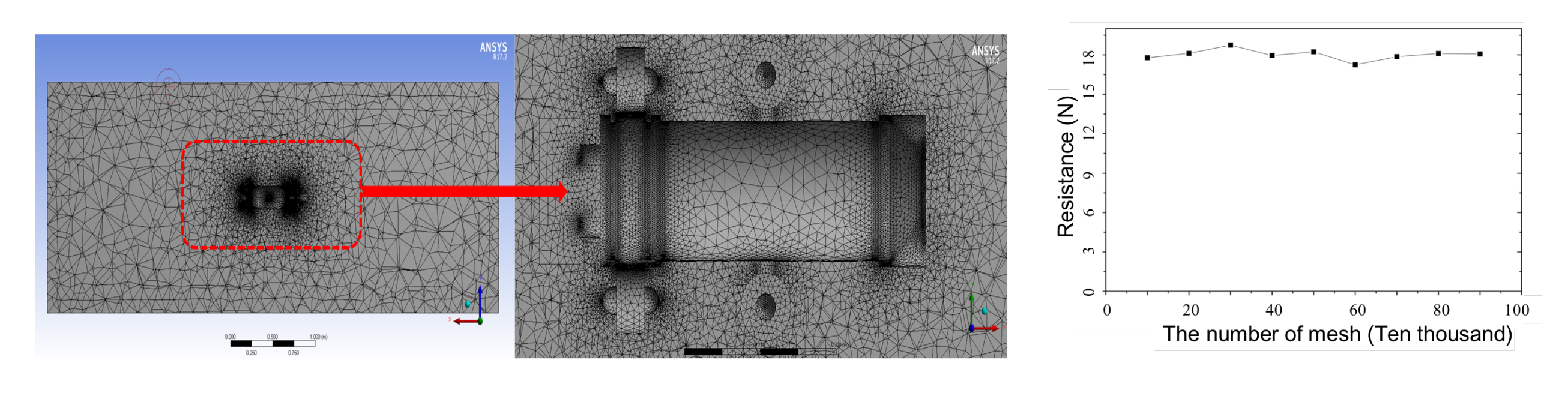
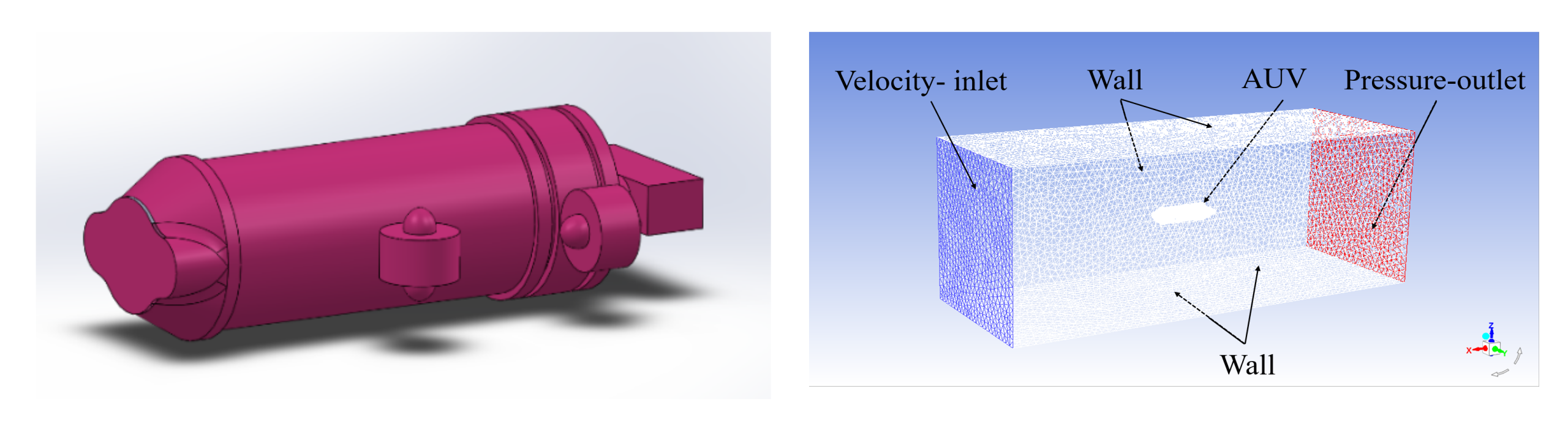
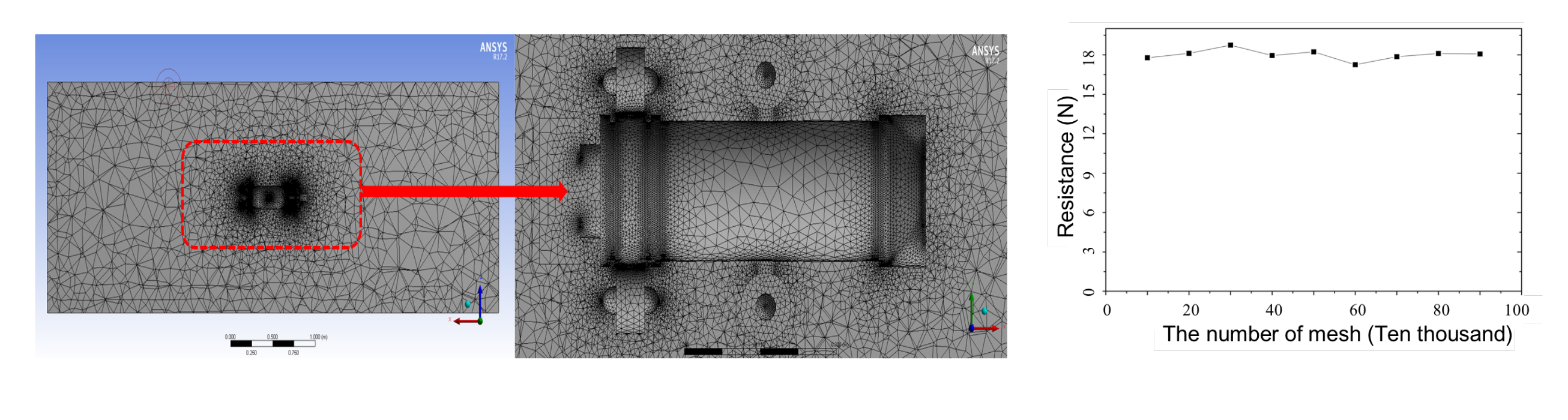
3. Numerical Investigation and Results
3.1. Towing Experiment Simulation
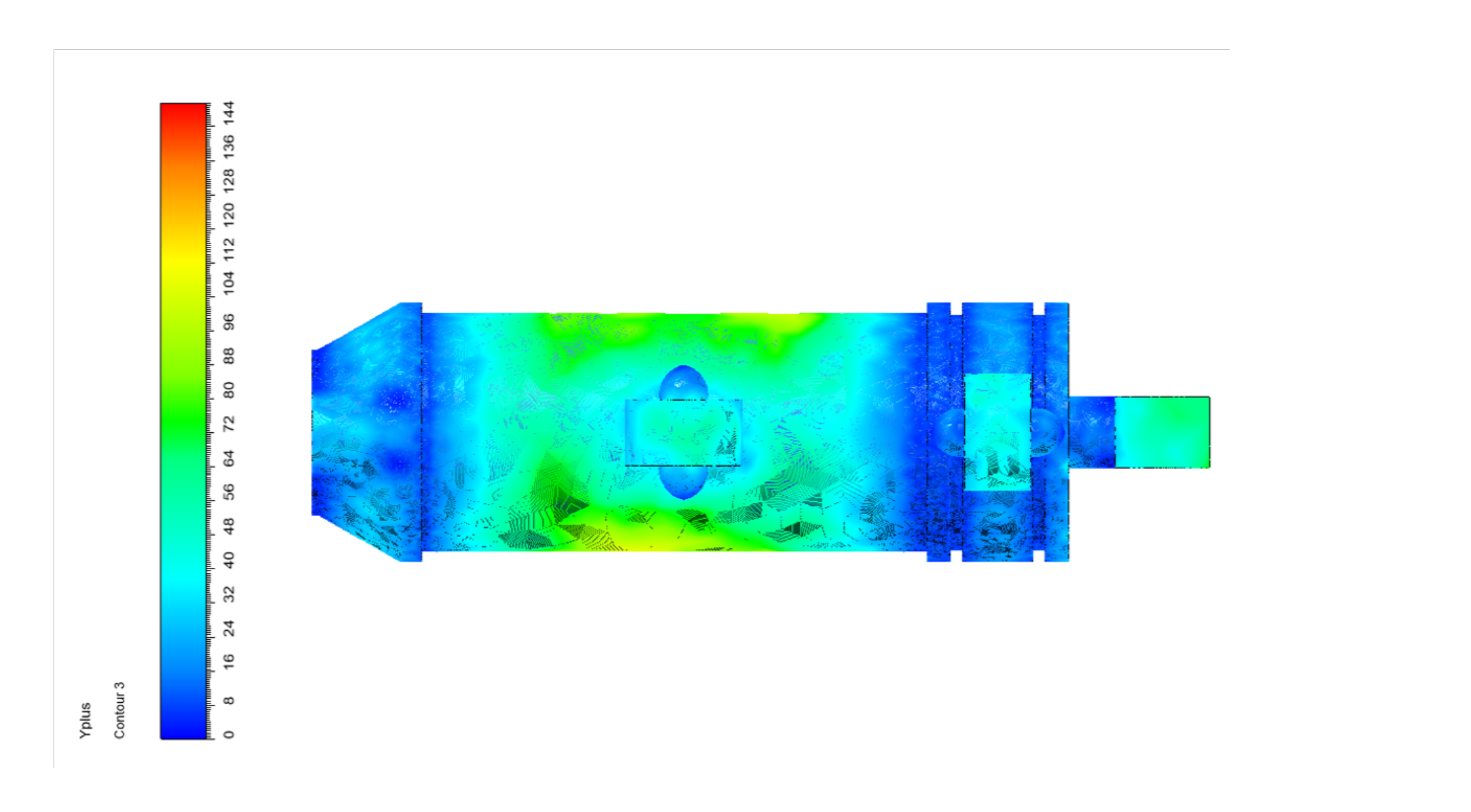
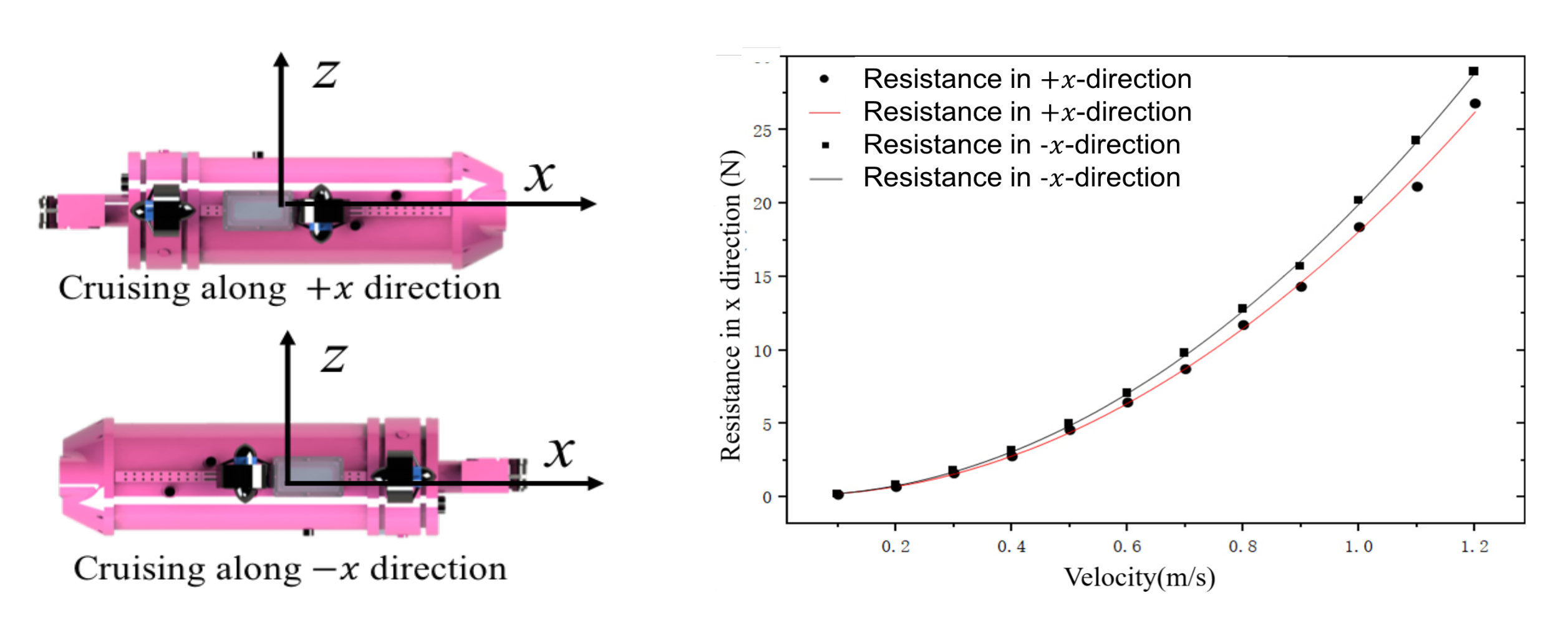
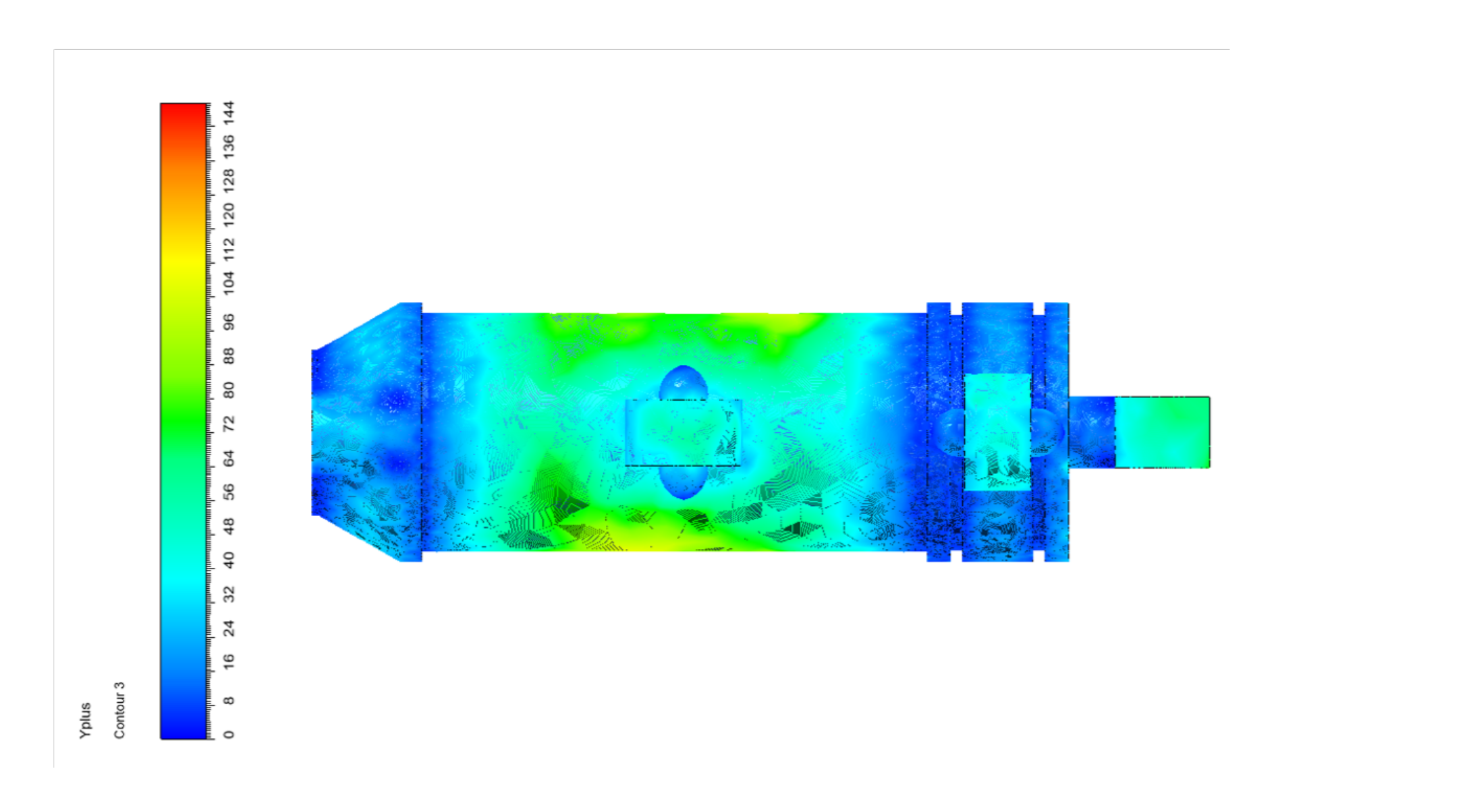
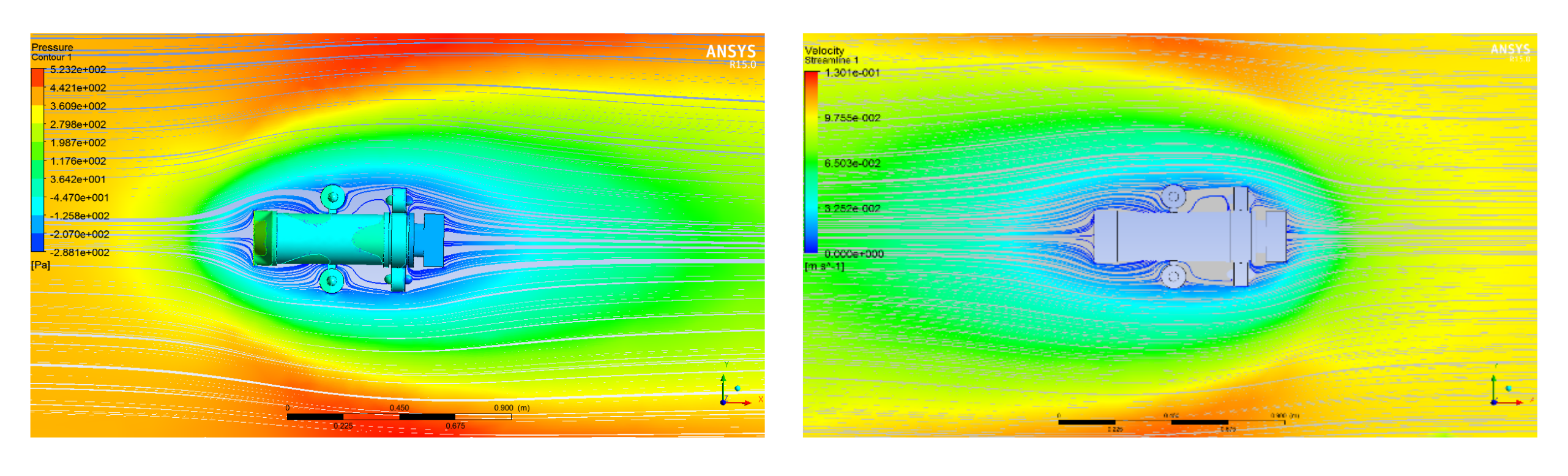
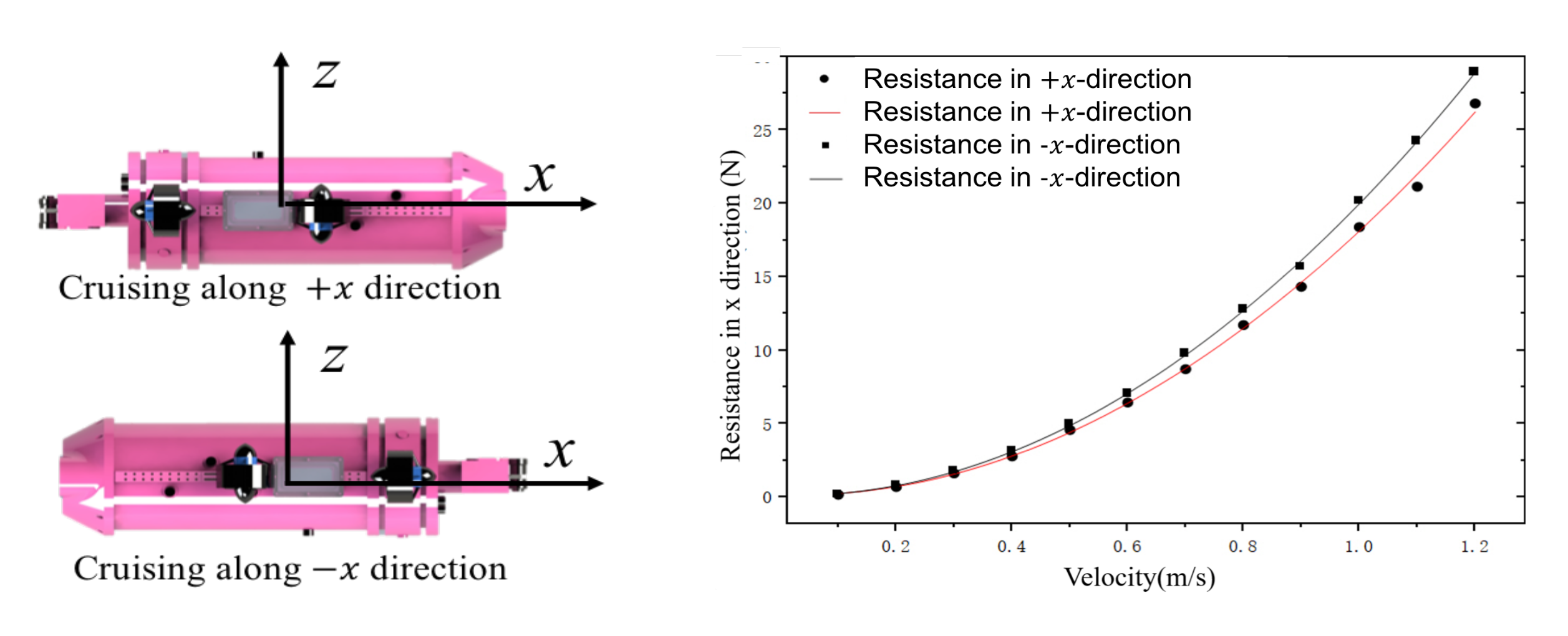
3.1.1. Hydrodynamic Performance of Forward Cruising
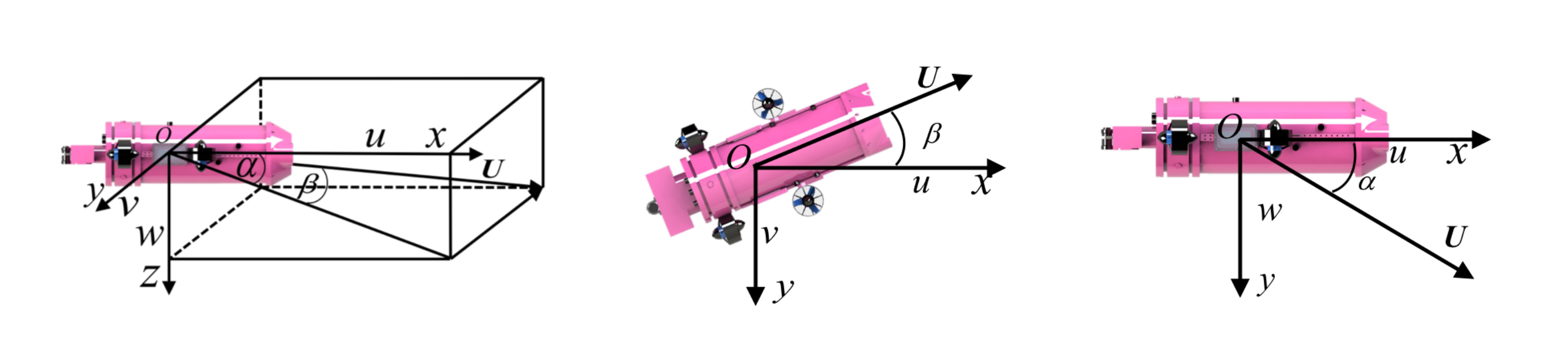
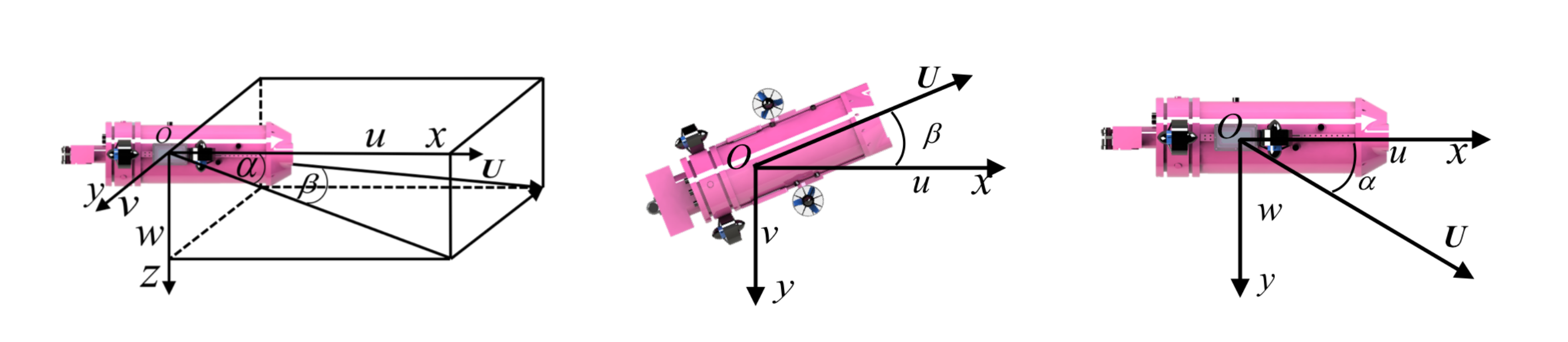
3.1.2. Hydrodynamic Performance of Oblique Cruising
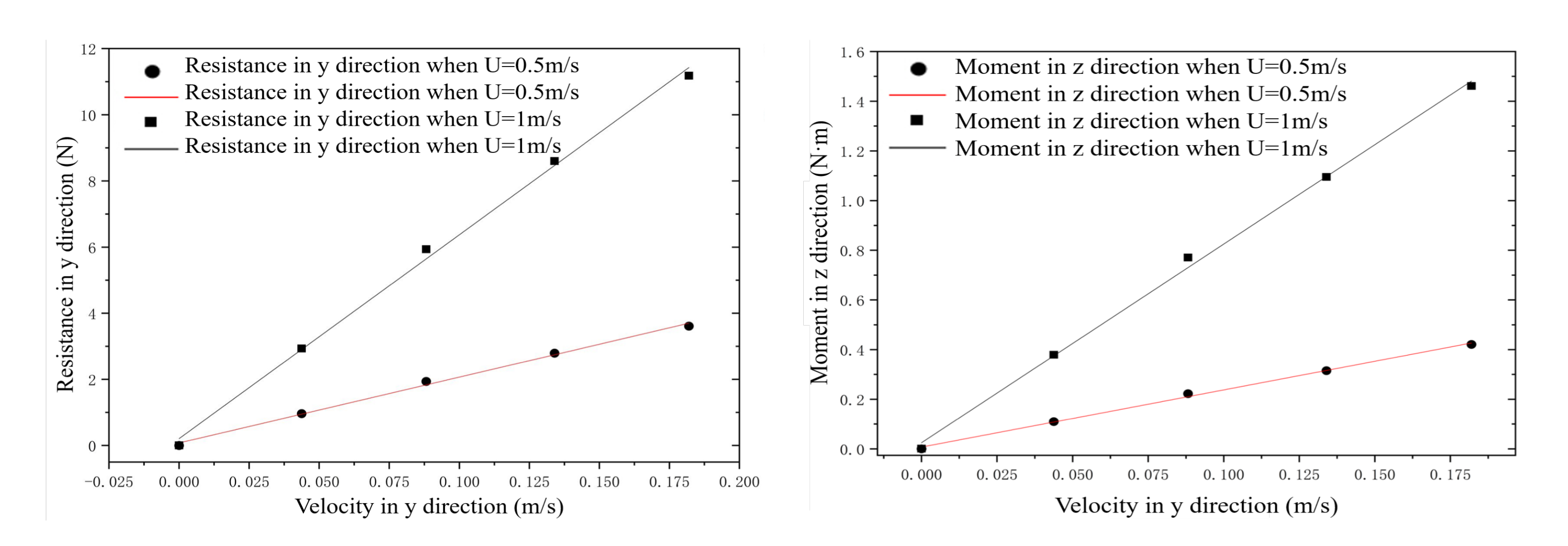
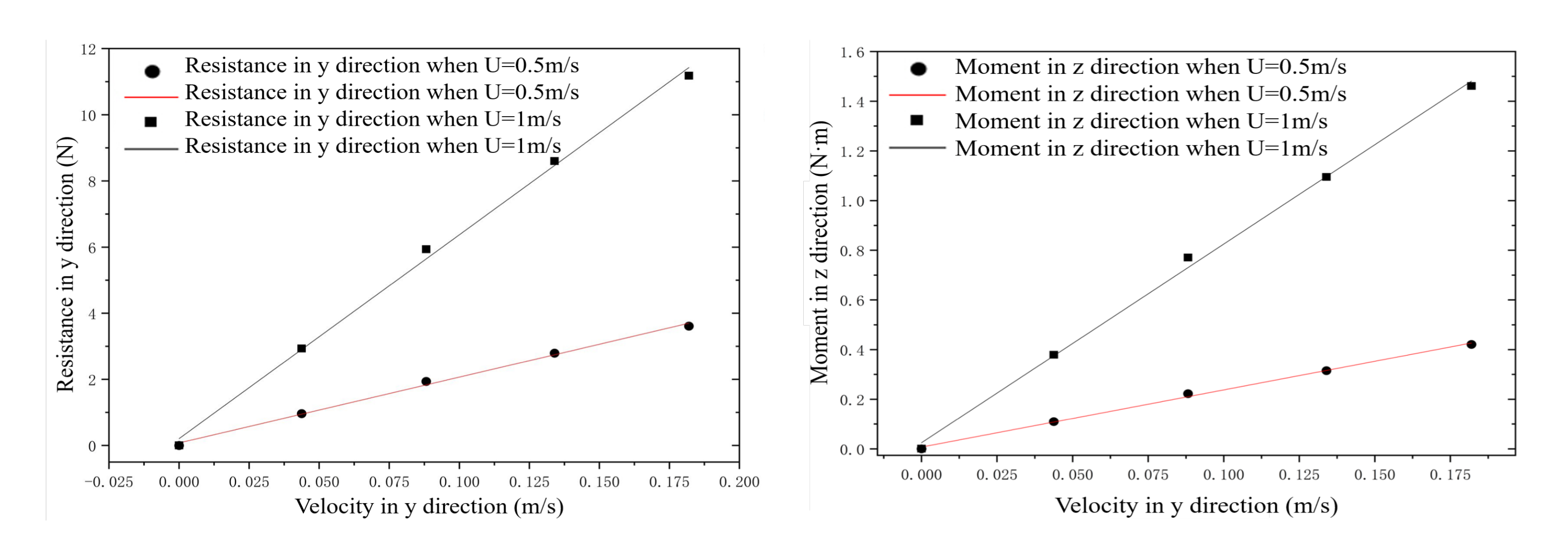
3.2. PMM Experiment Simulation
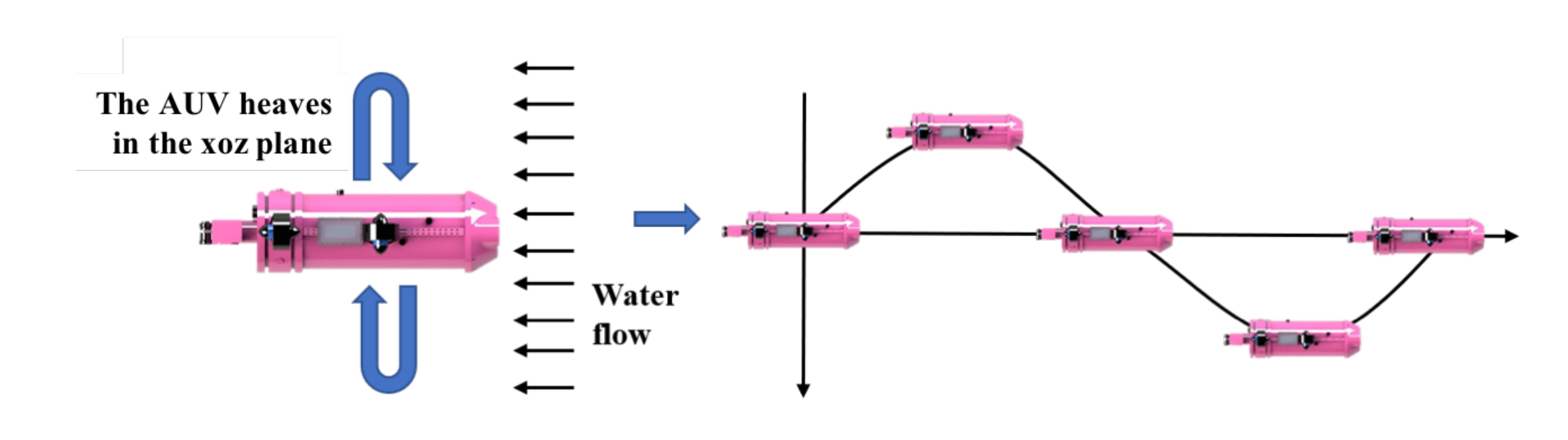
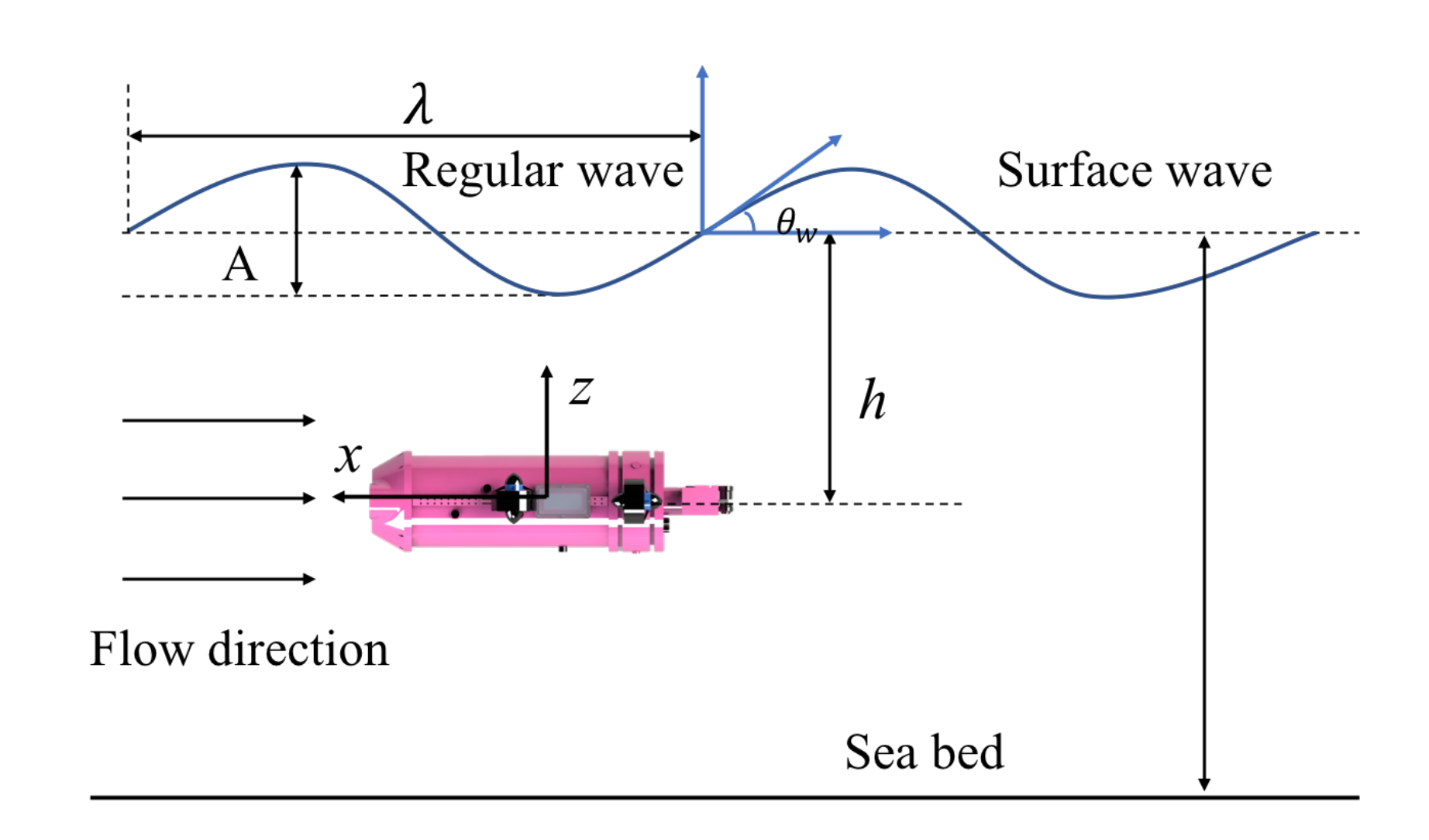
3.3. Hydrodynamic Performance Analysis near Water Surface
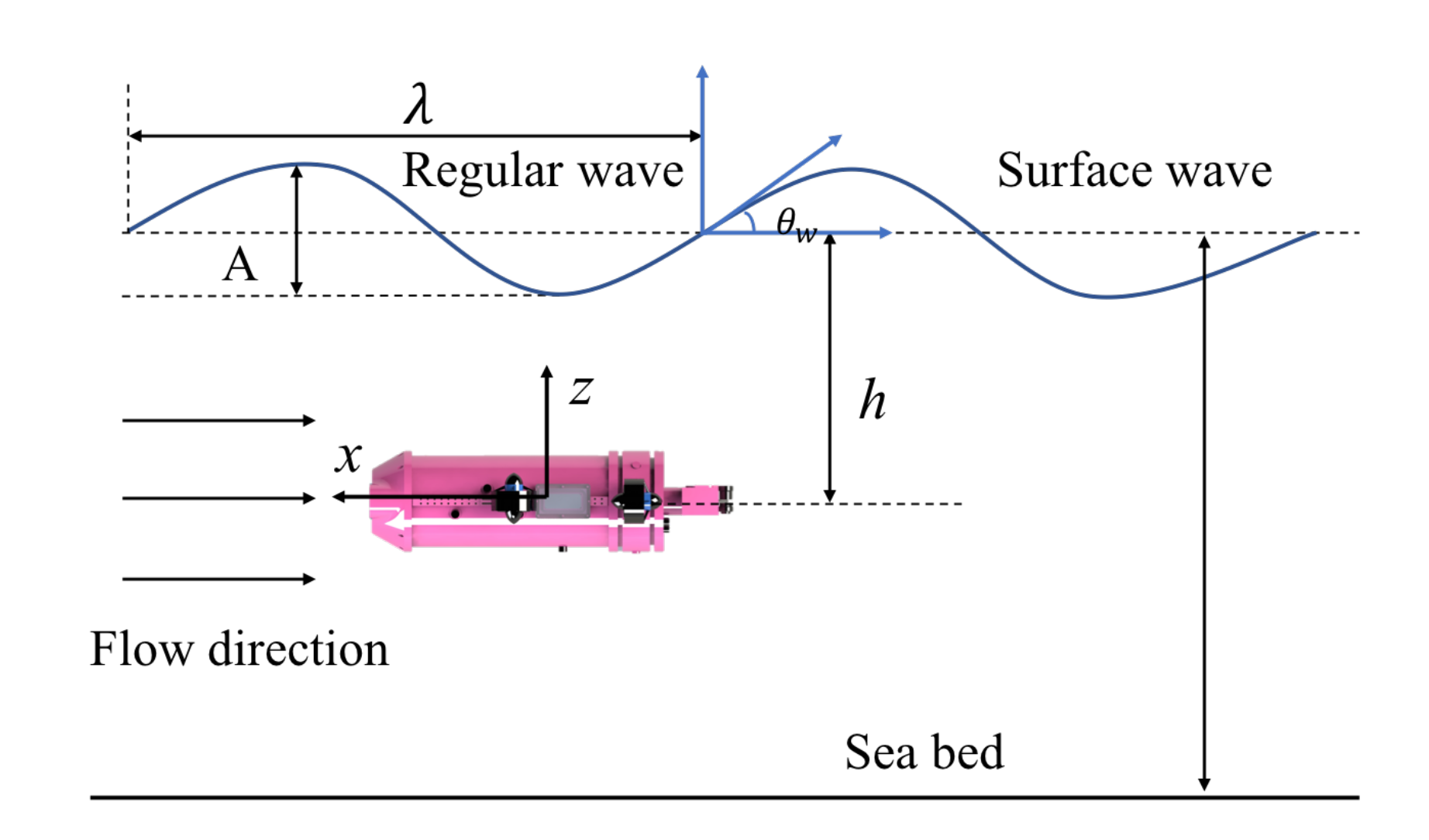
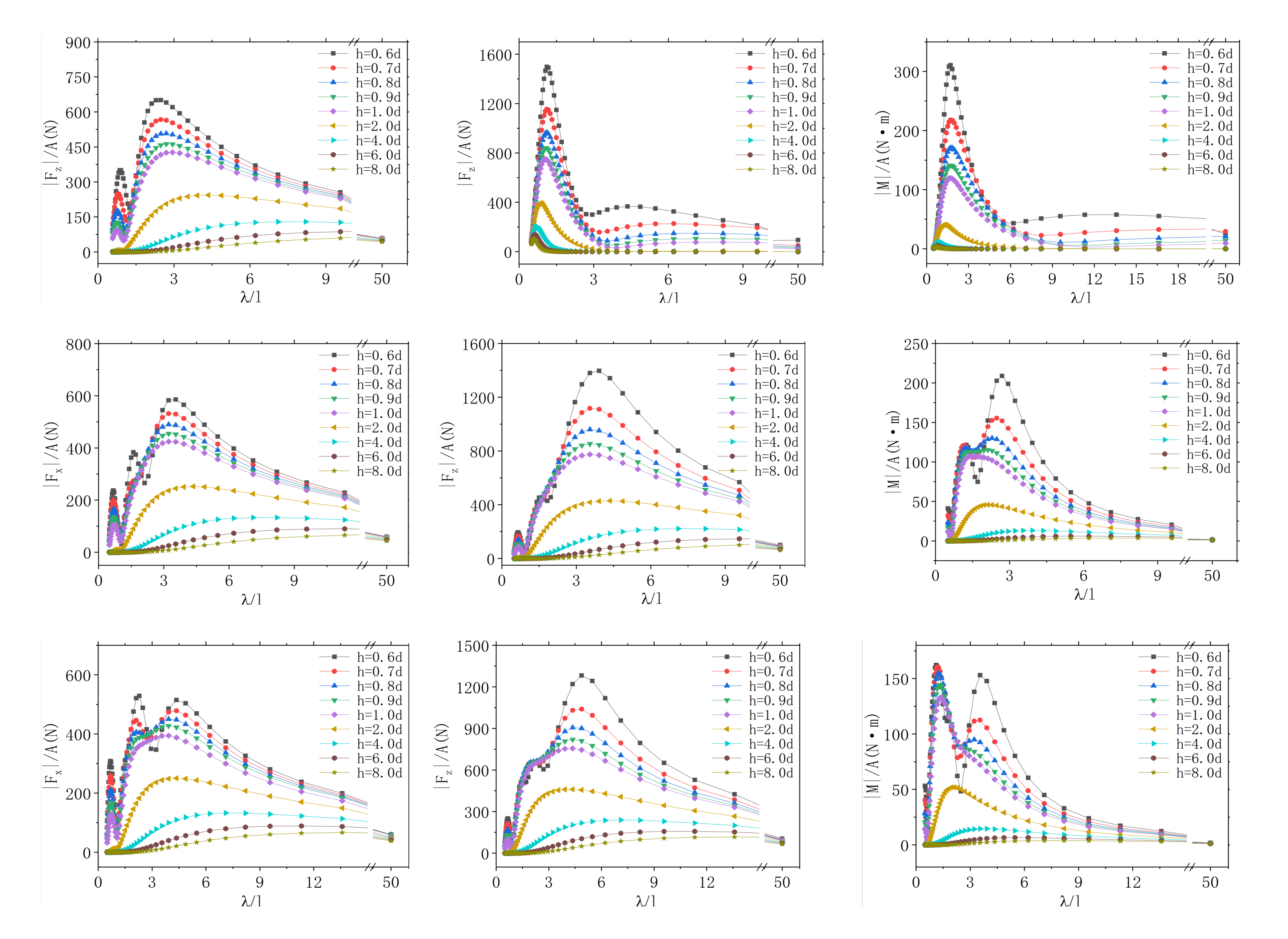
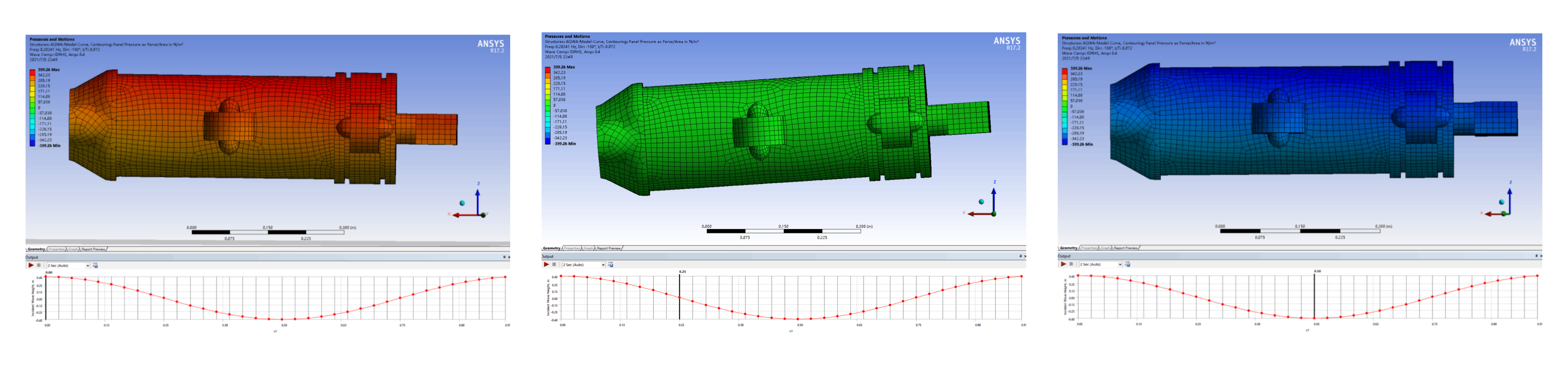
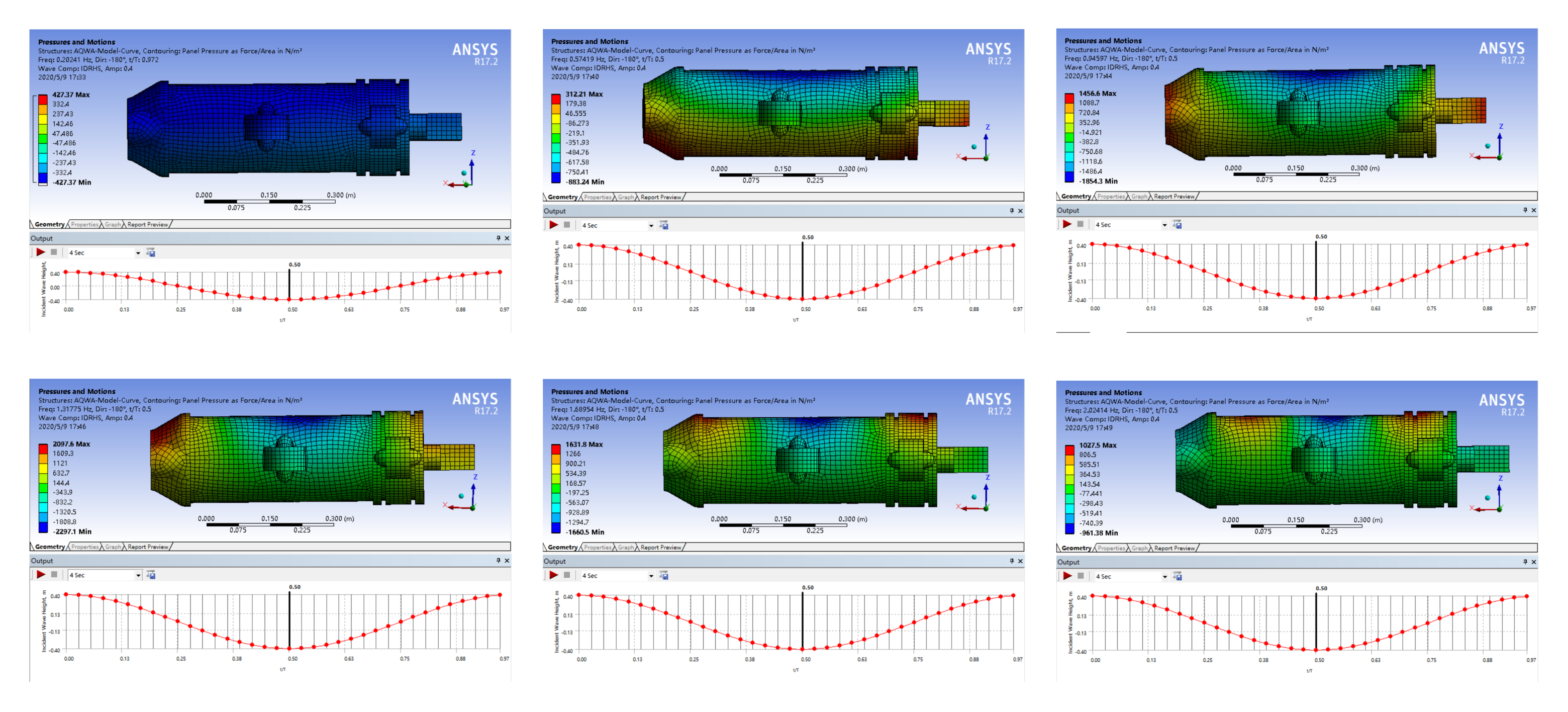
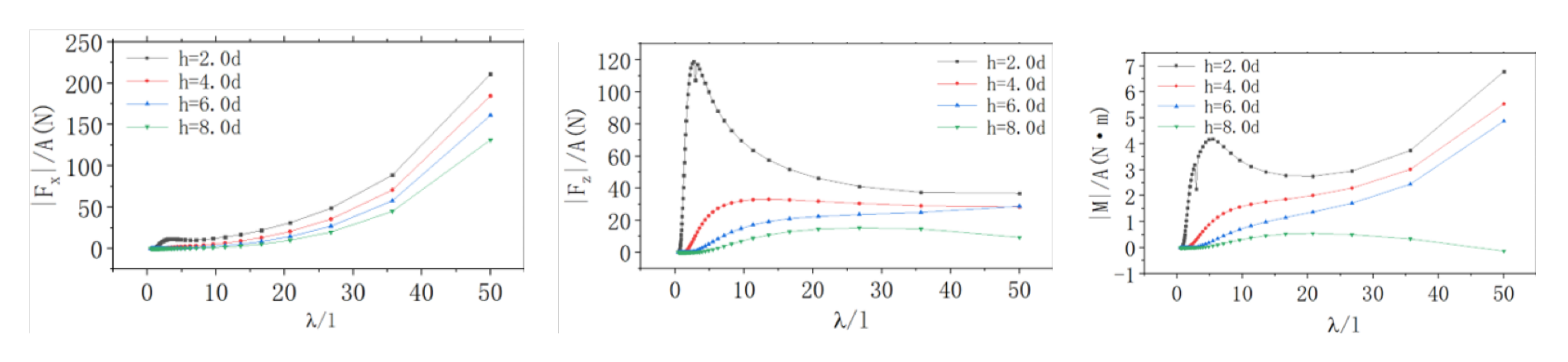
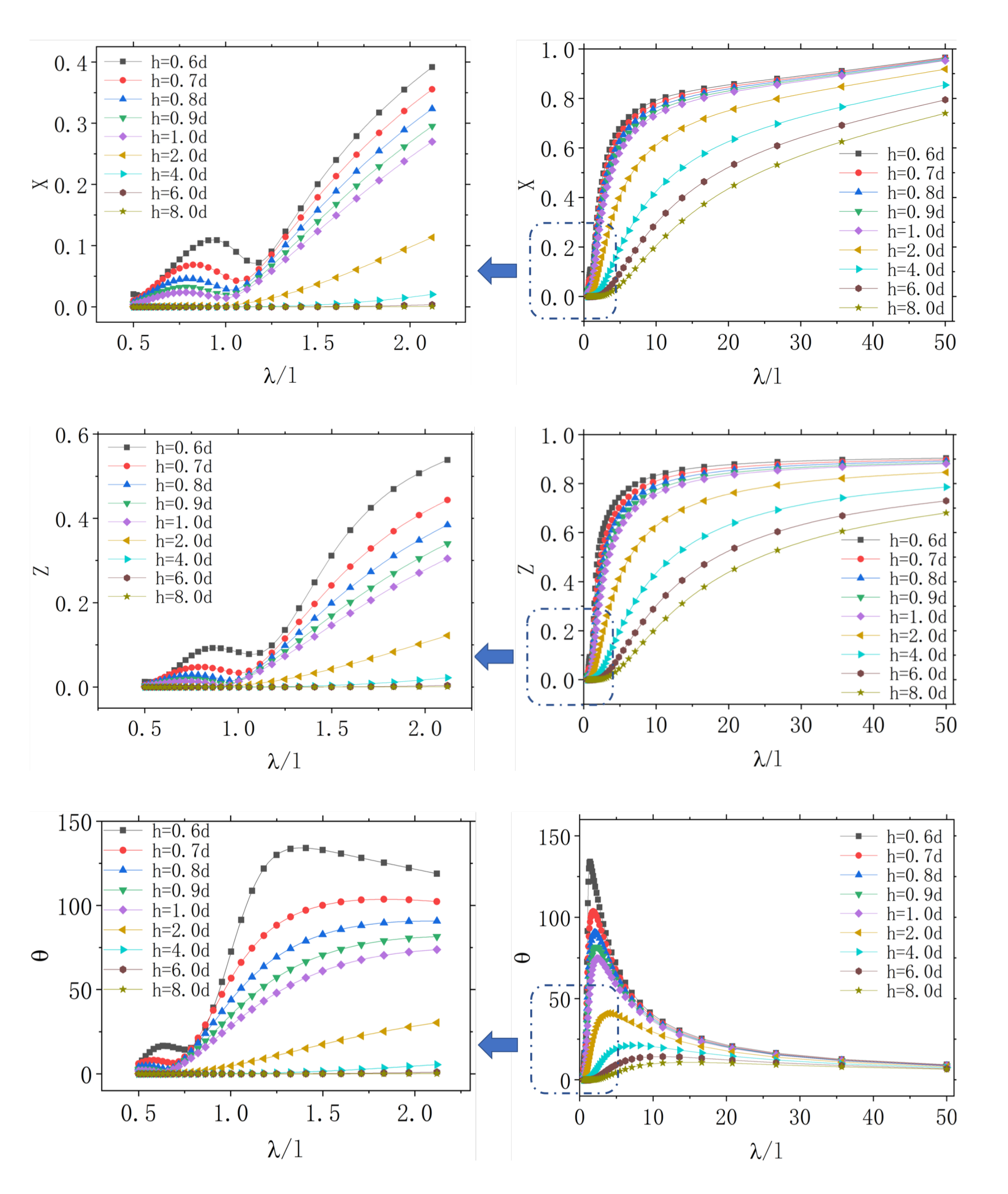
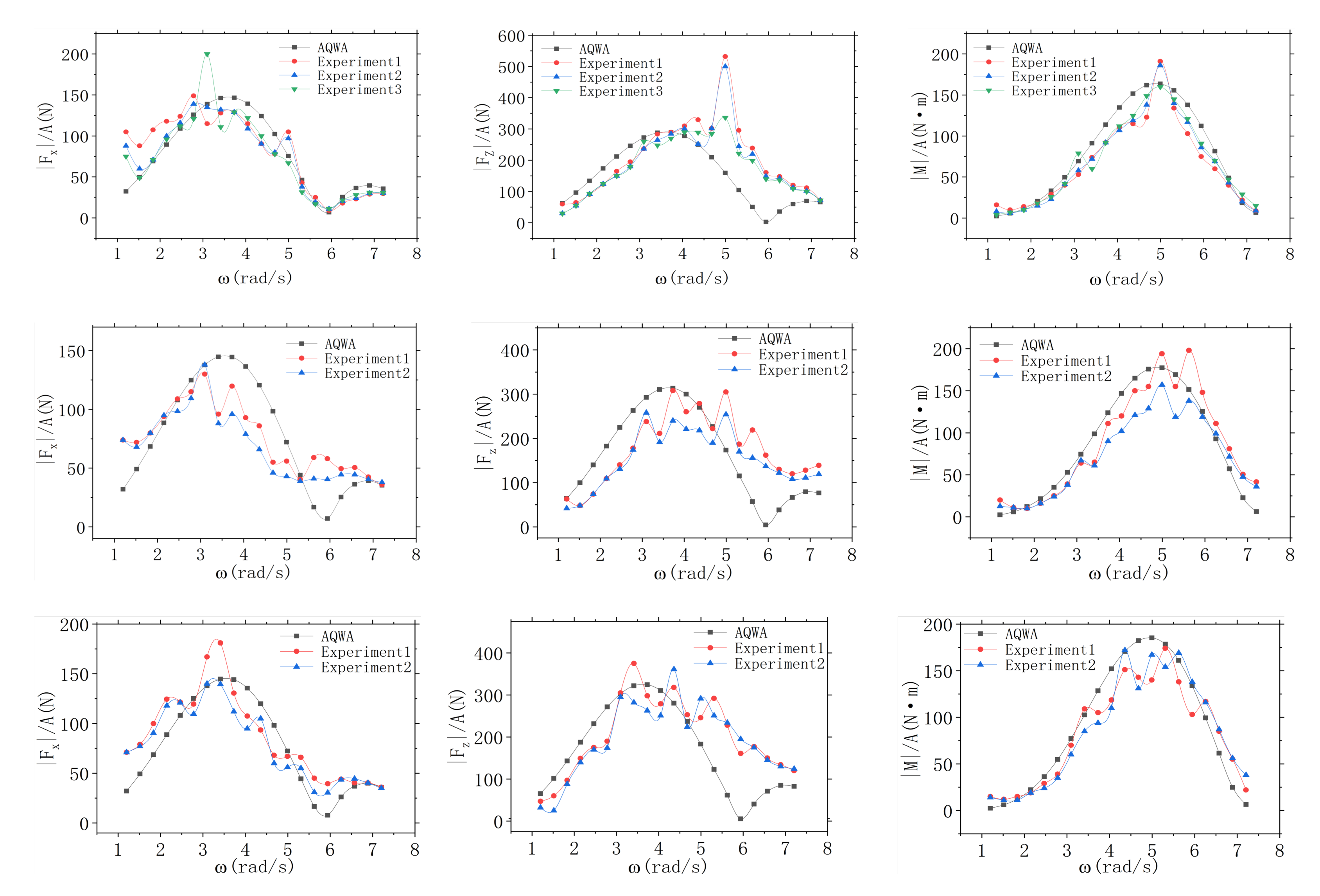
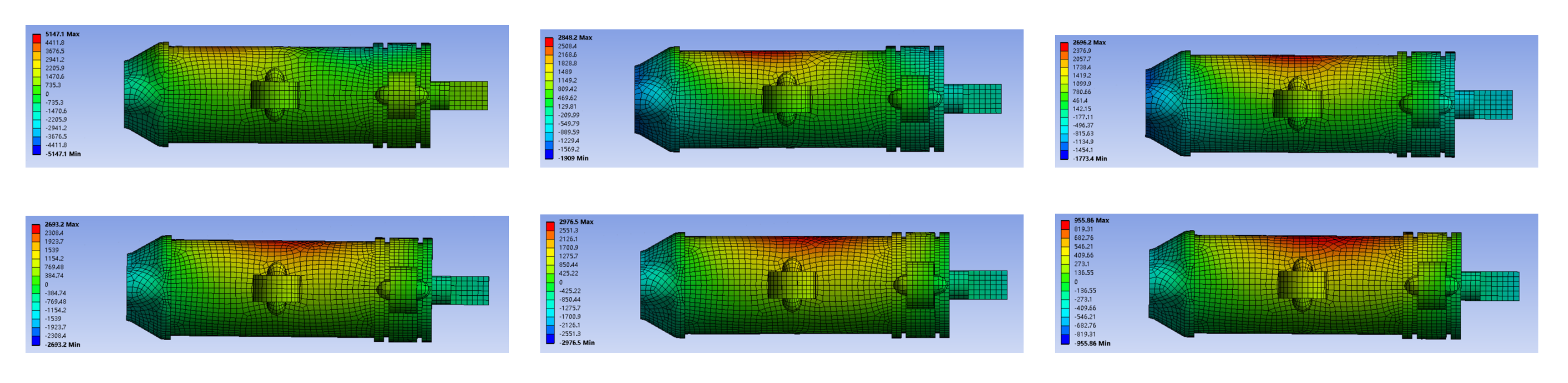
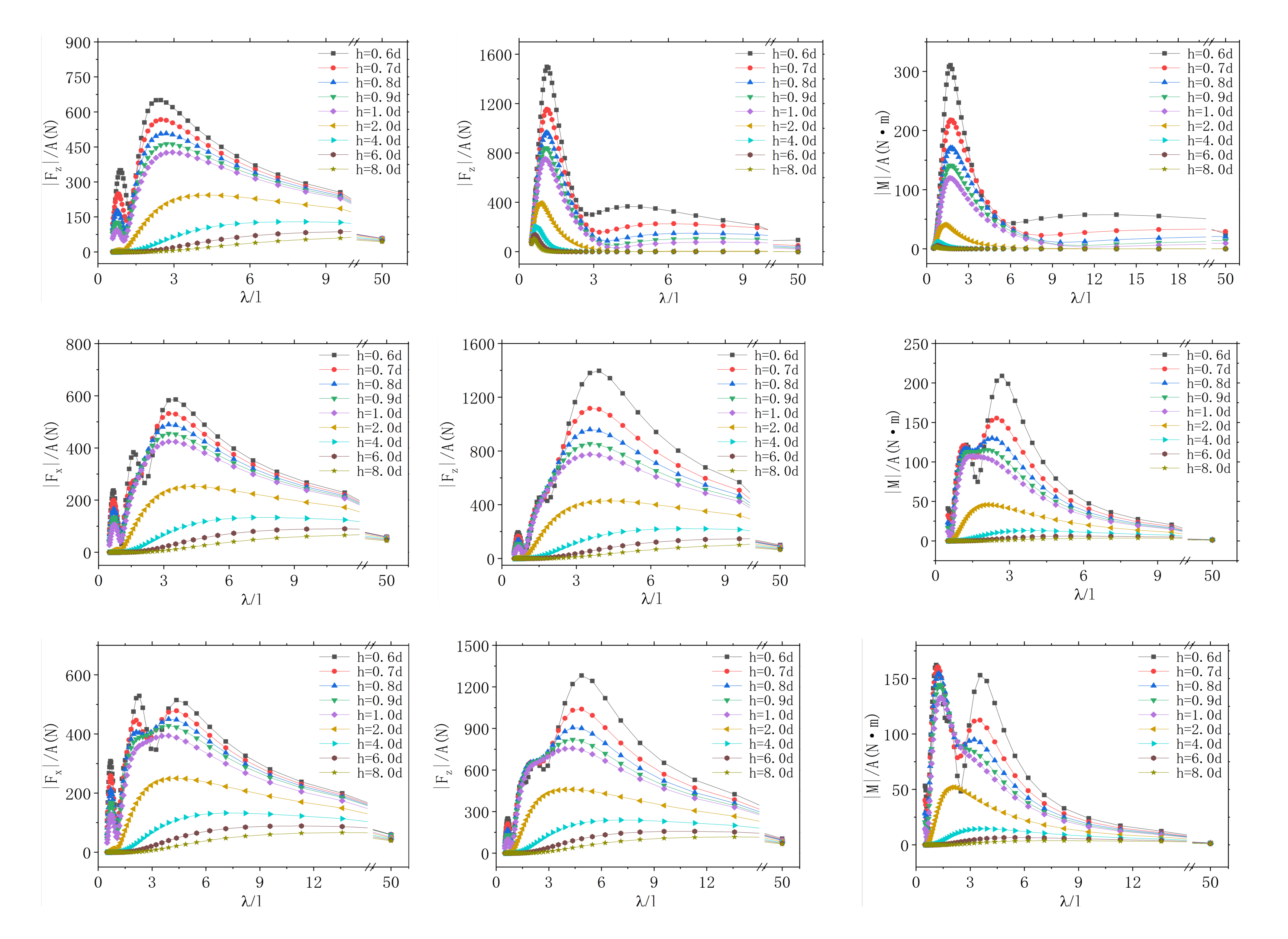
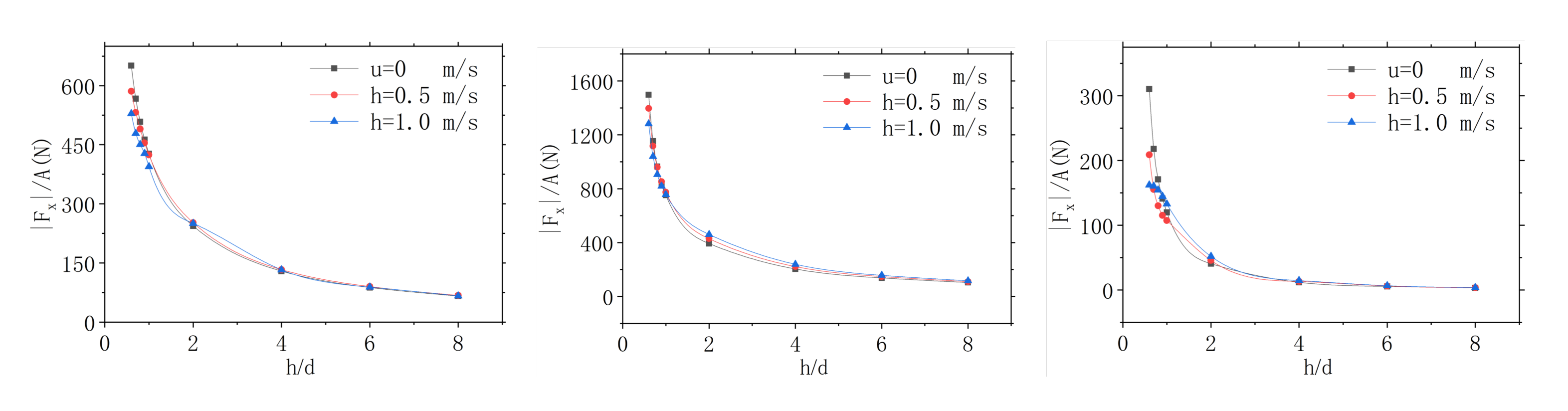
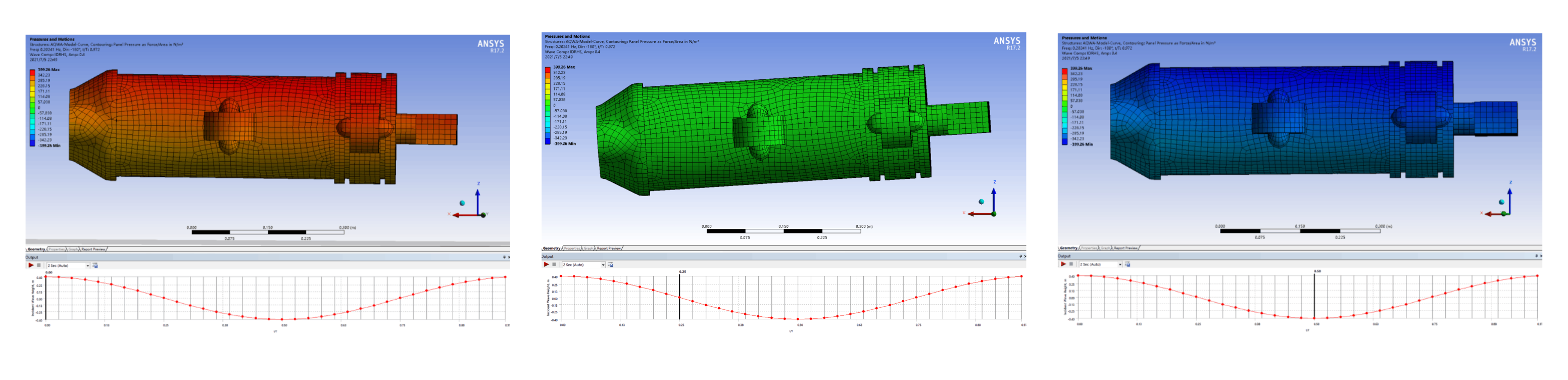
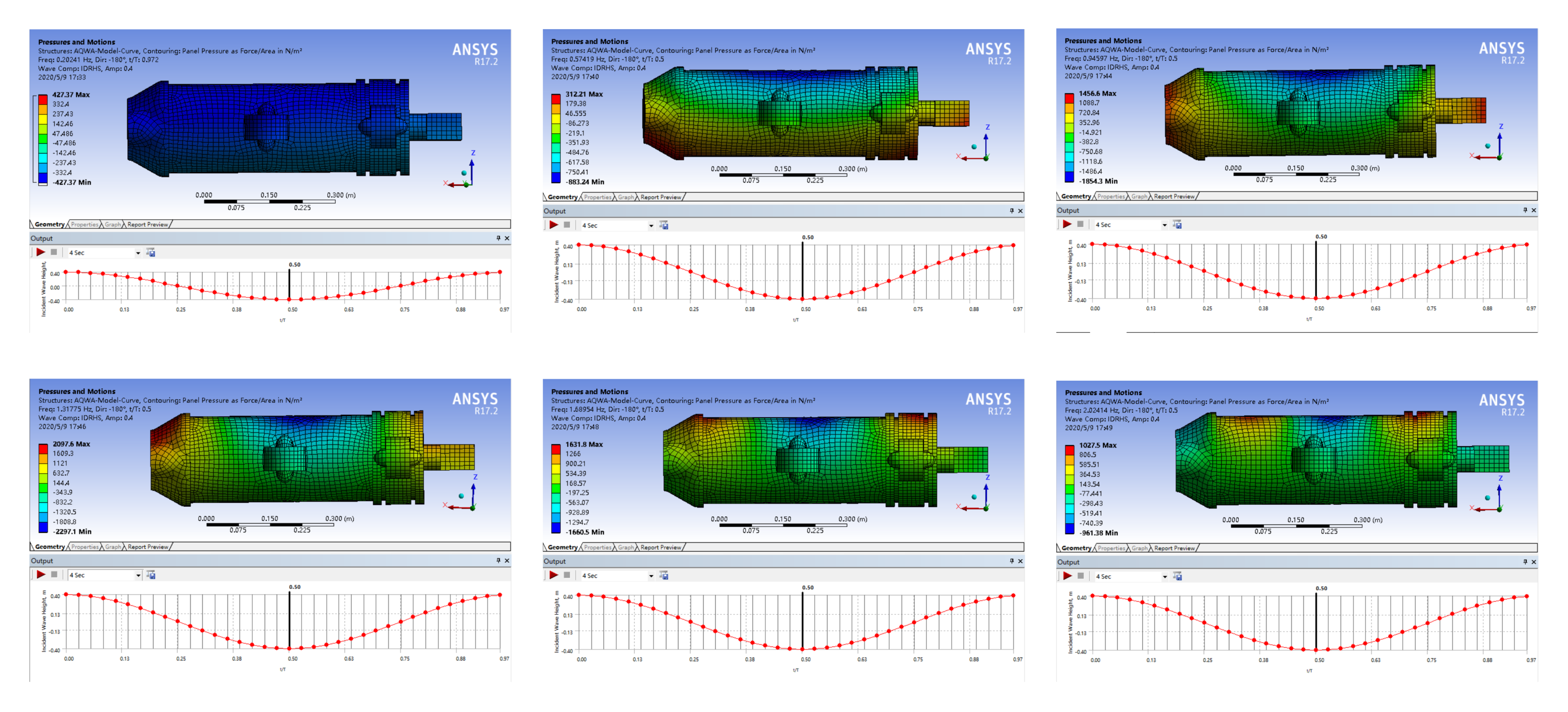
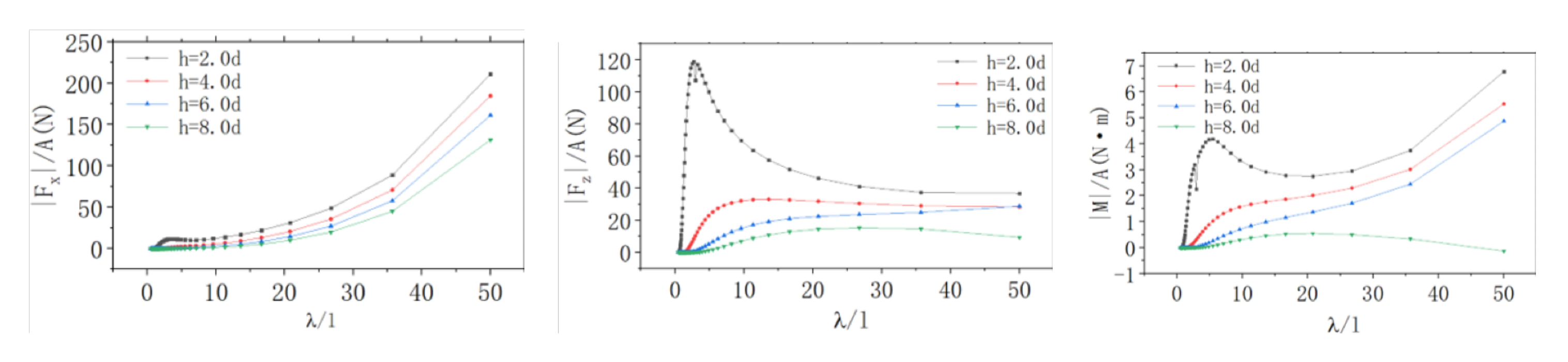
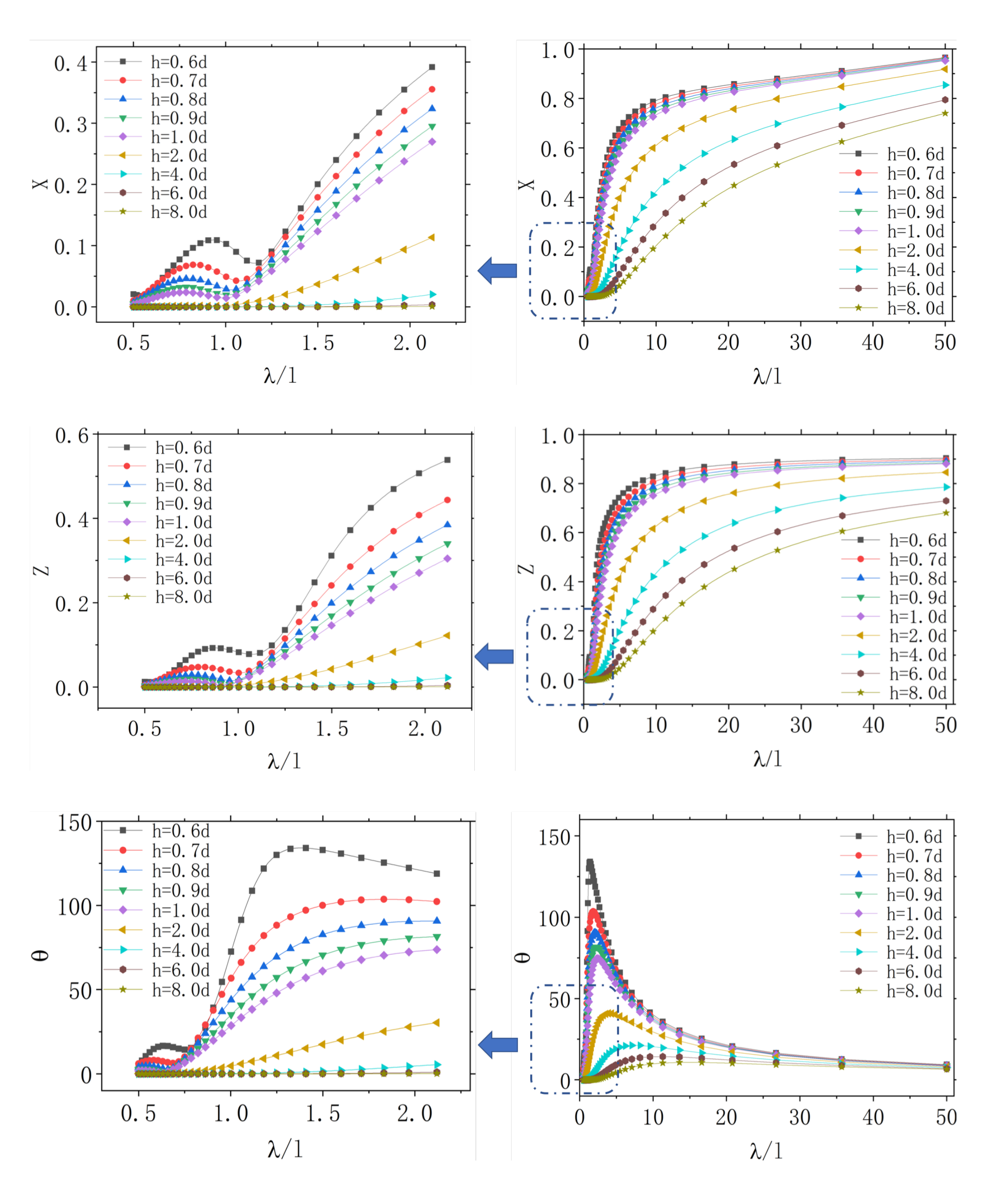
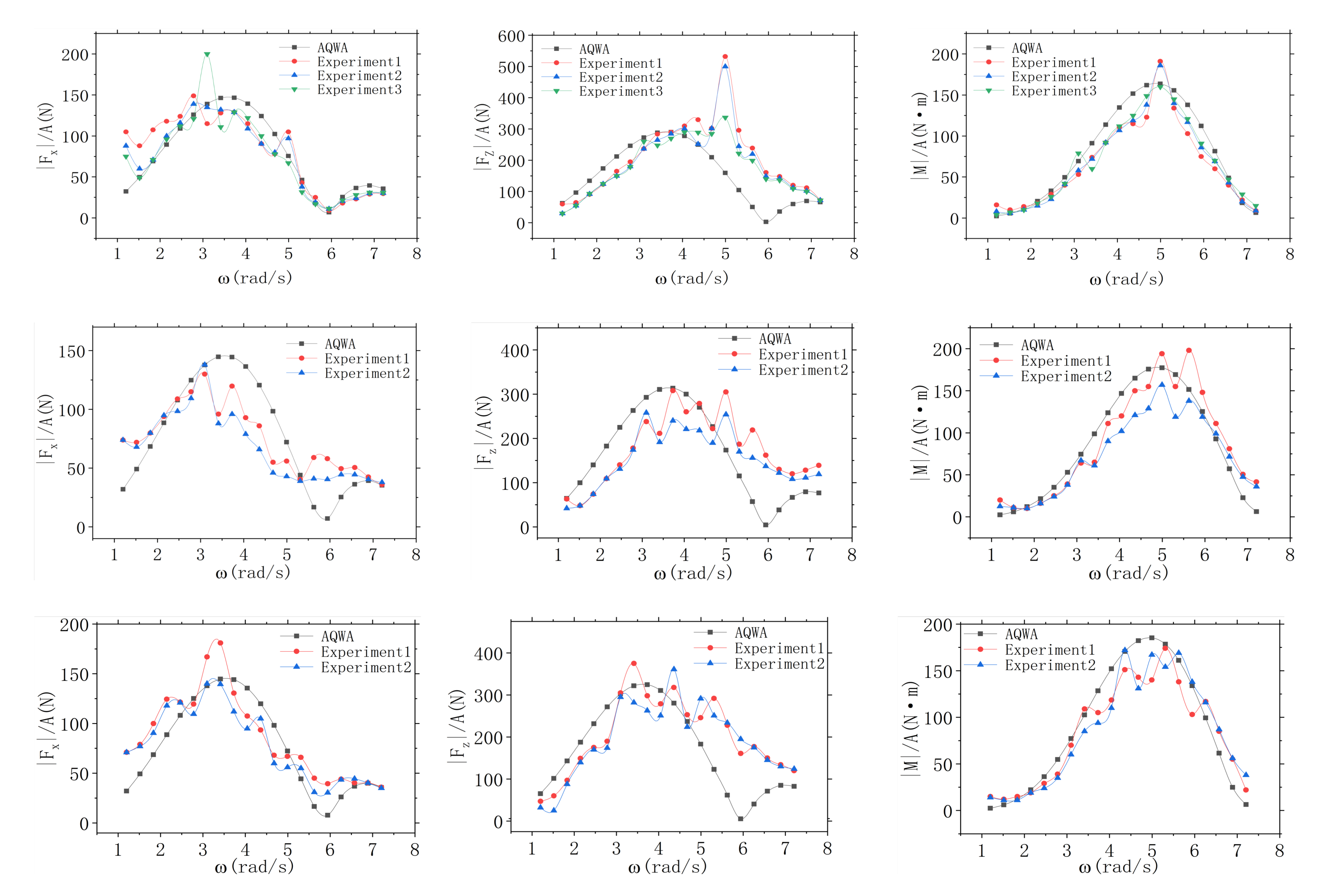
3.3.1. Hydrodynamic Performance Analysis under Regular Waves
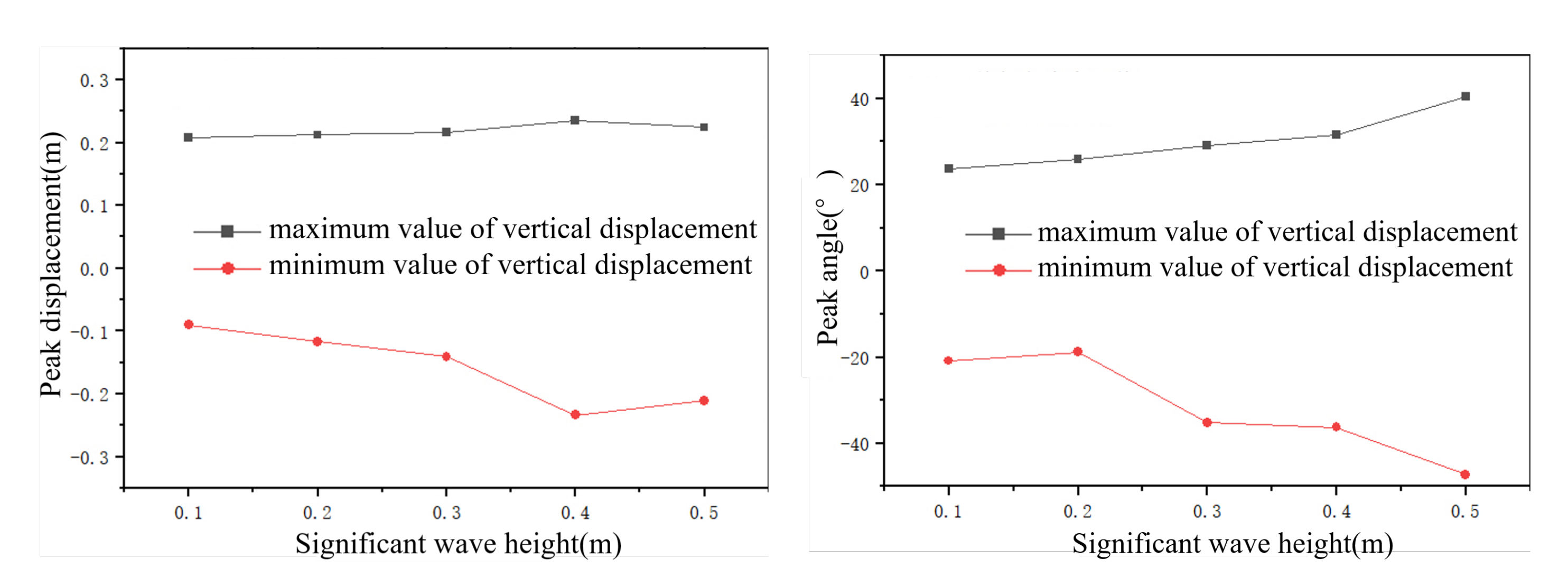
3.3.2. Hydrodynamic Performance Analysis under Irregular Waves
4. Experiments and Analysis
4.1. Validation of CFD Simulation
4.1.1. Validation of the Towing Experiment Simulation
4.1.2. Validation of the PMM Experiment Simulation
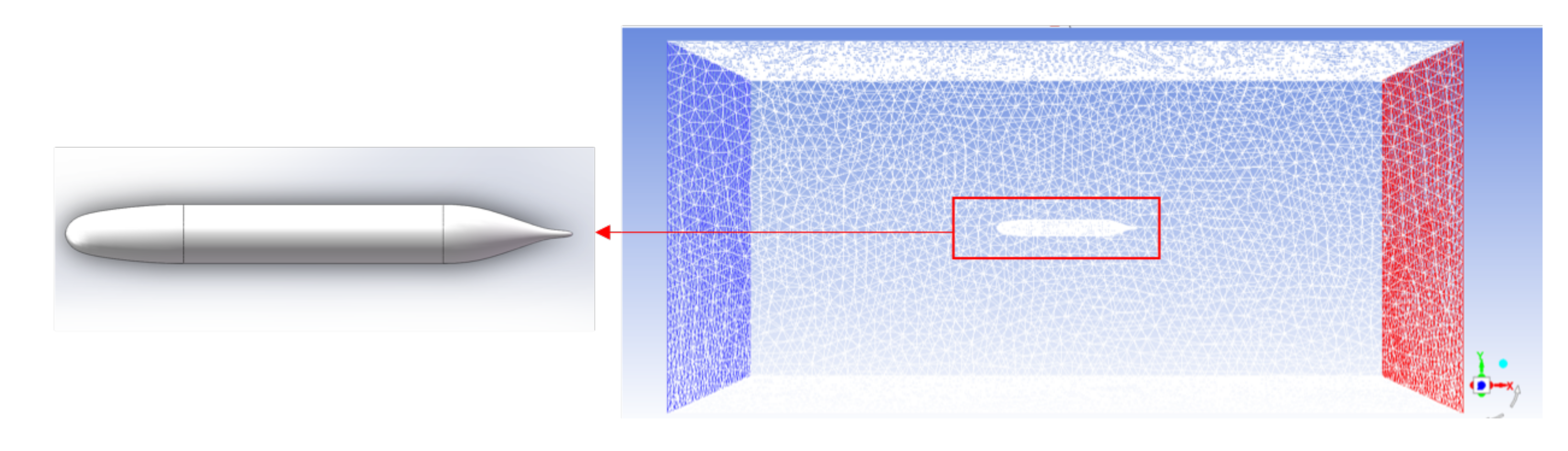
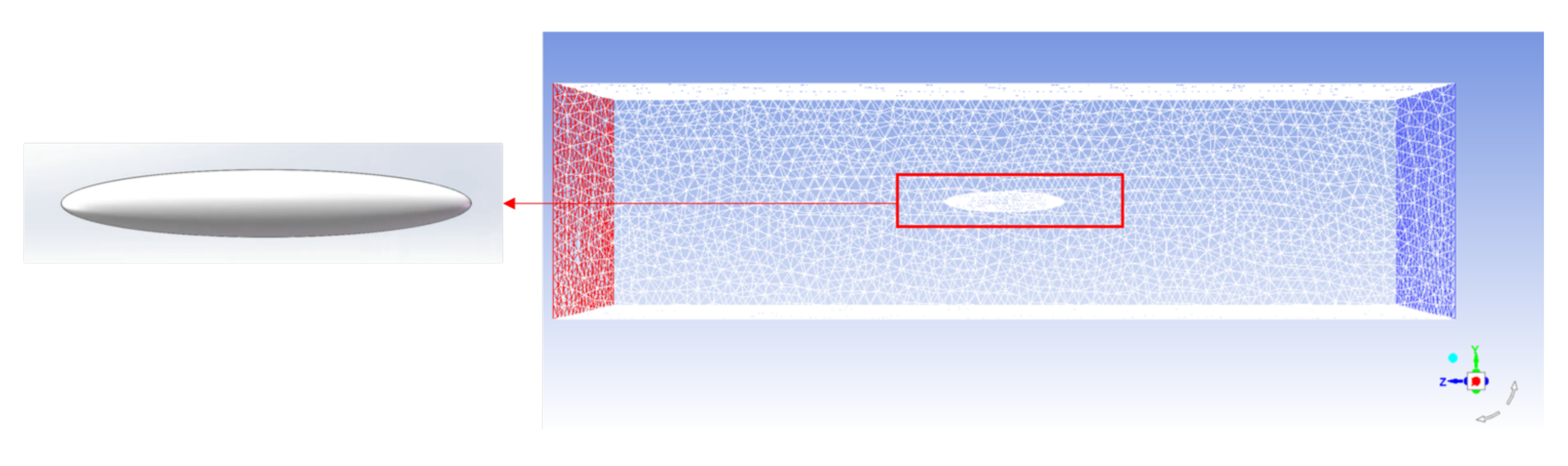
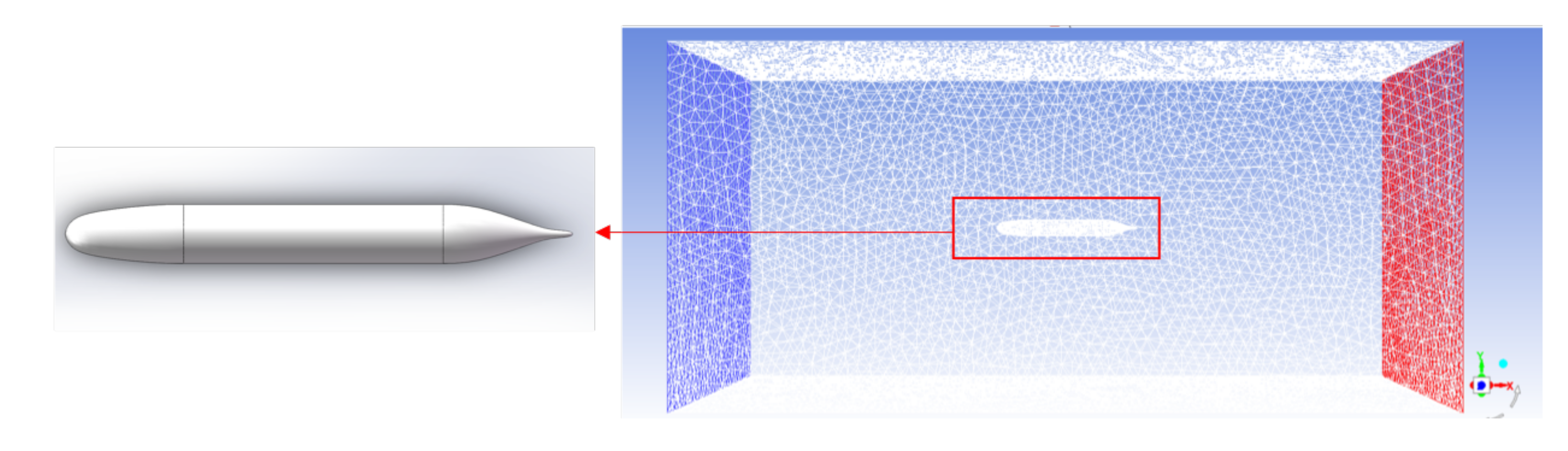
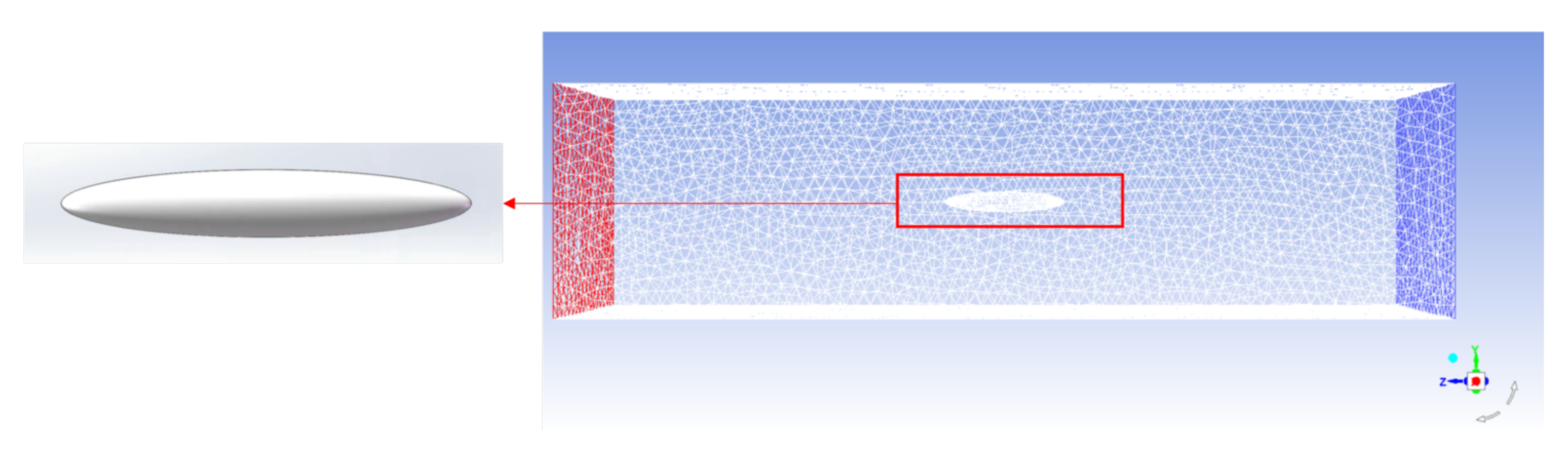
4.1.3. Validation of Hydrodynamic Performance Analysis Method in Surface Waves
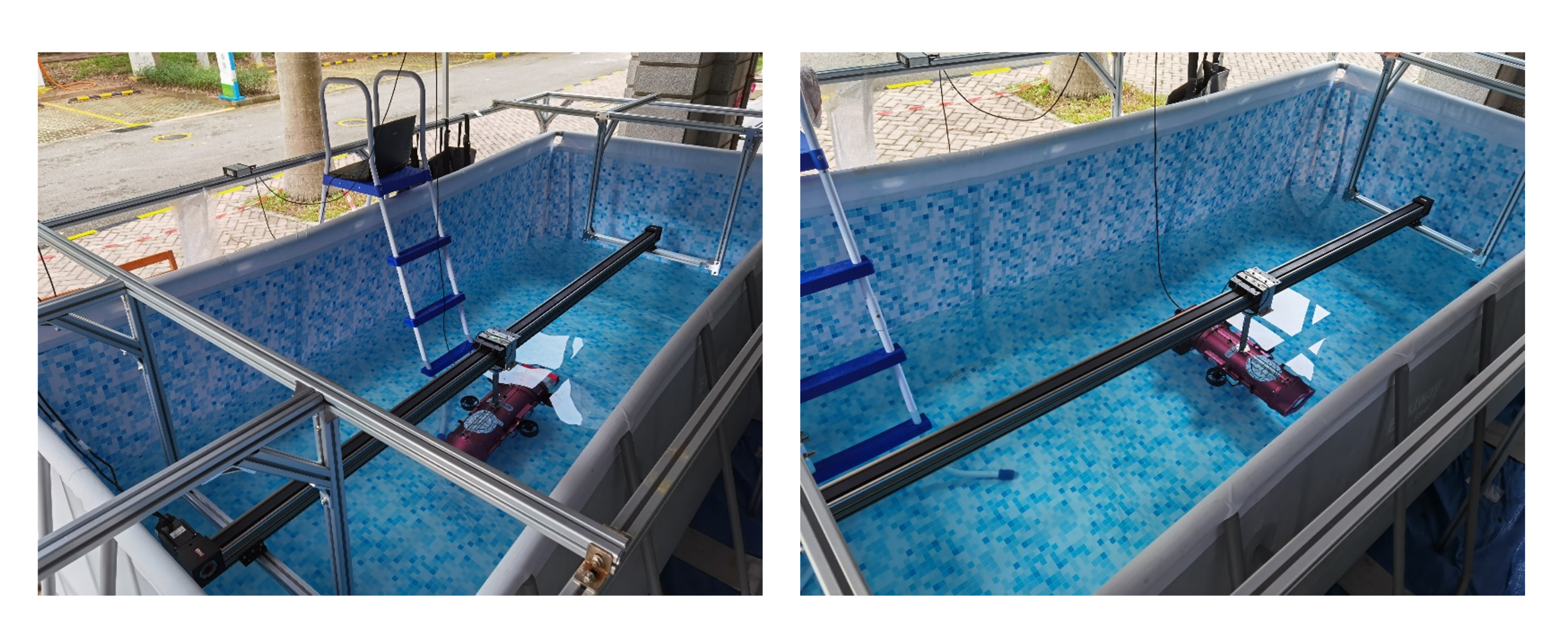
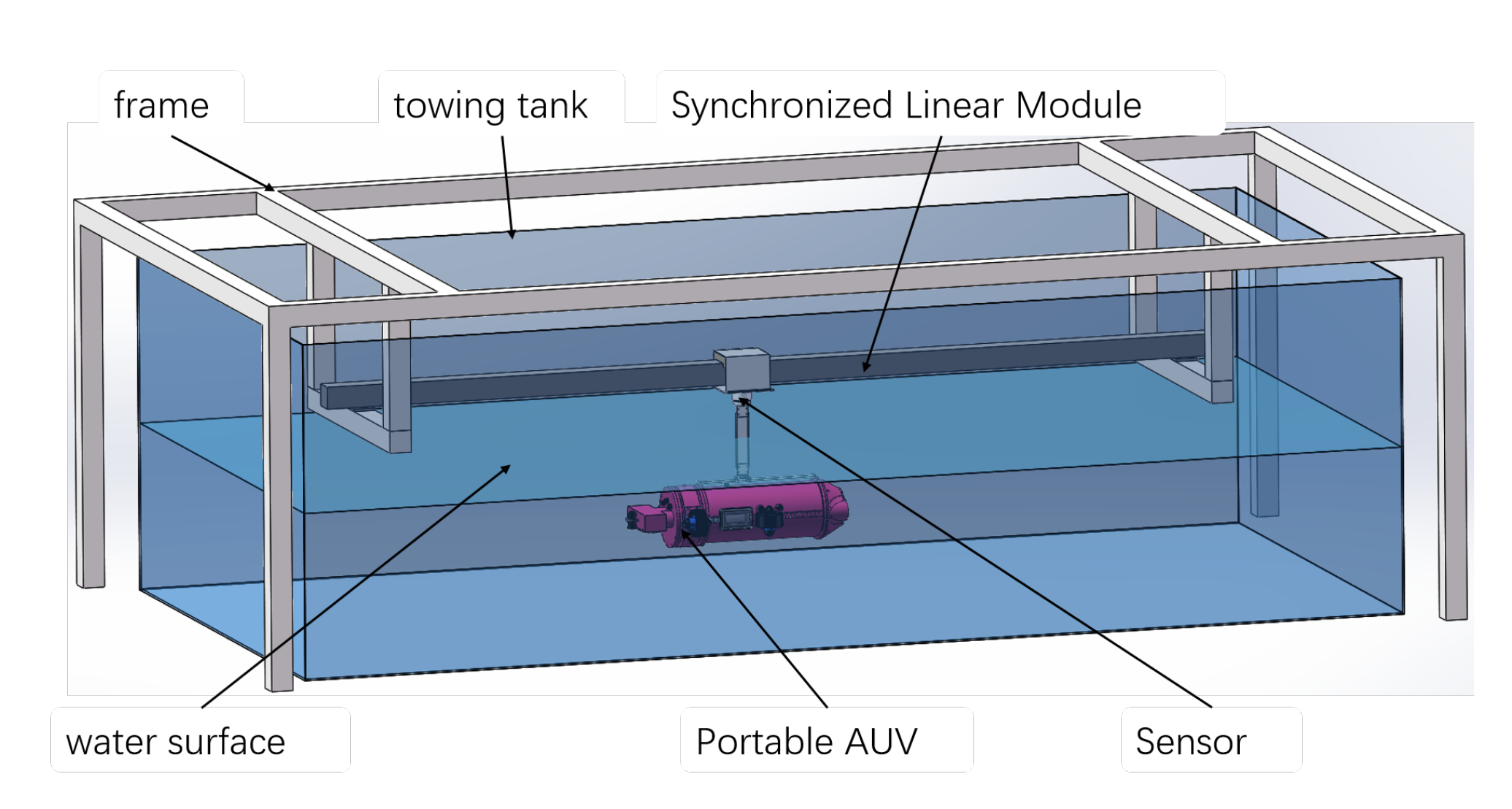
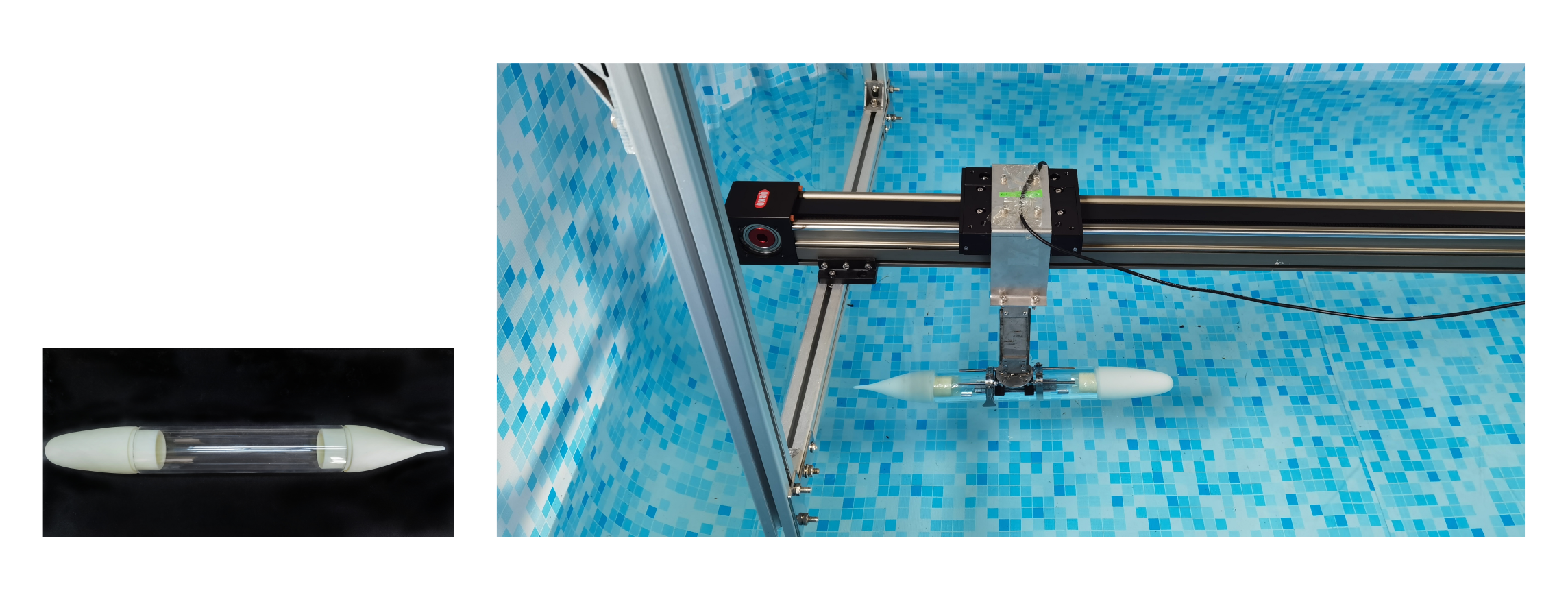
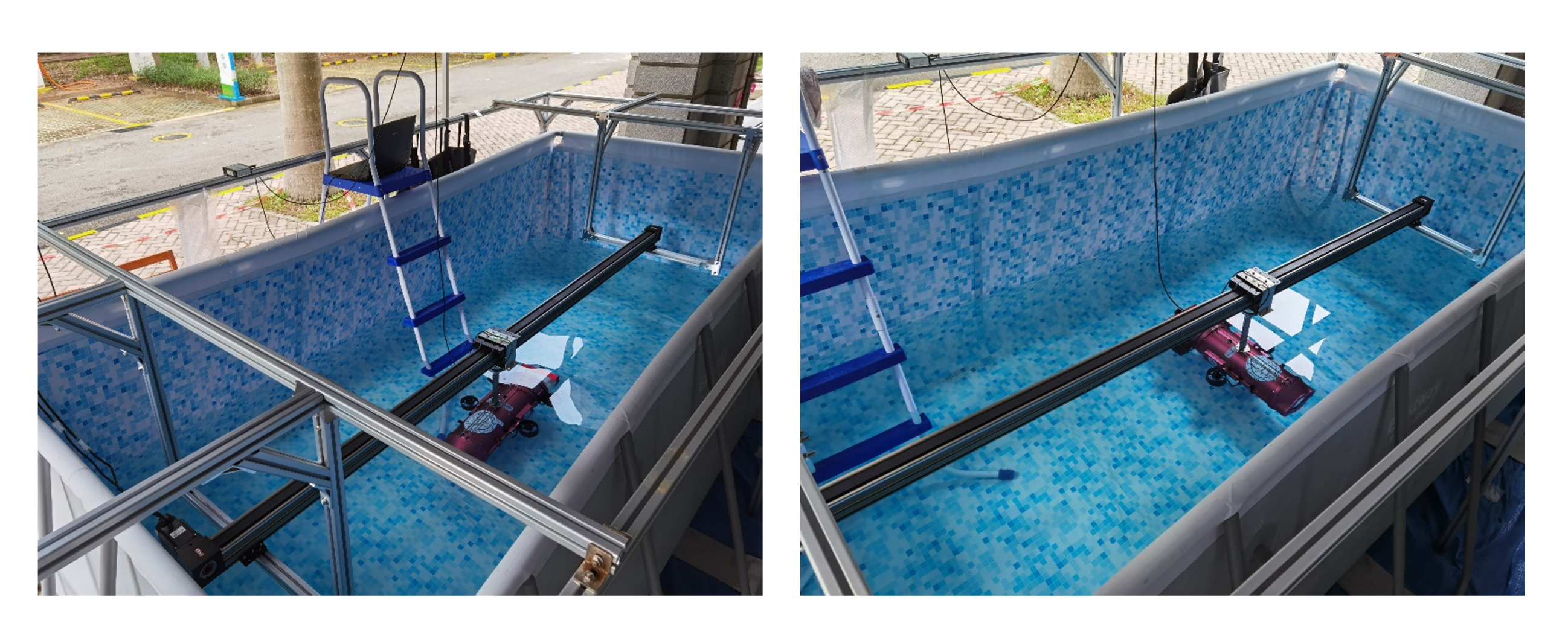
4.2. Establishment of Physical Experimental Platform
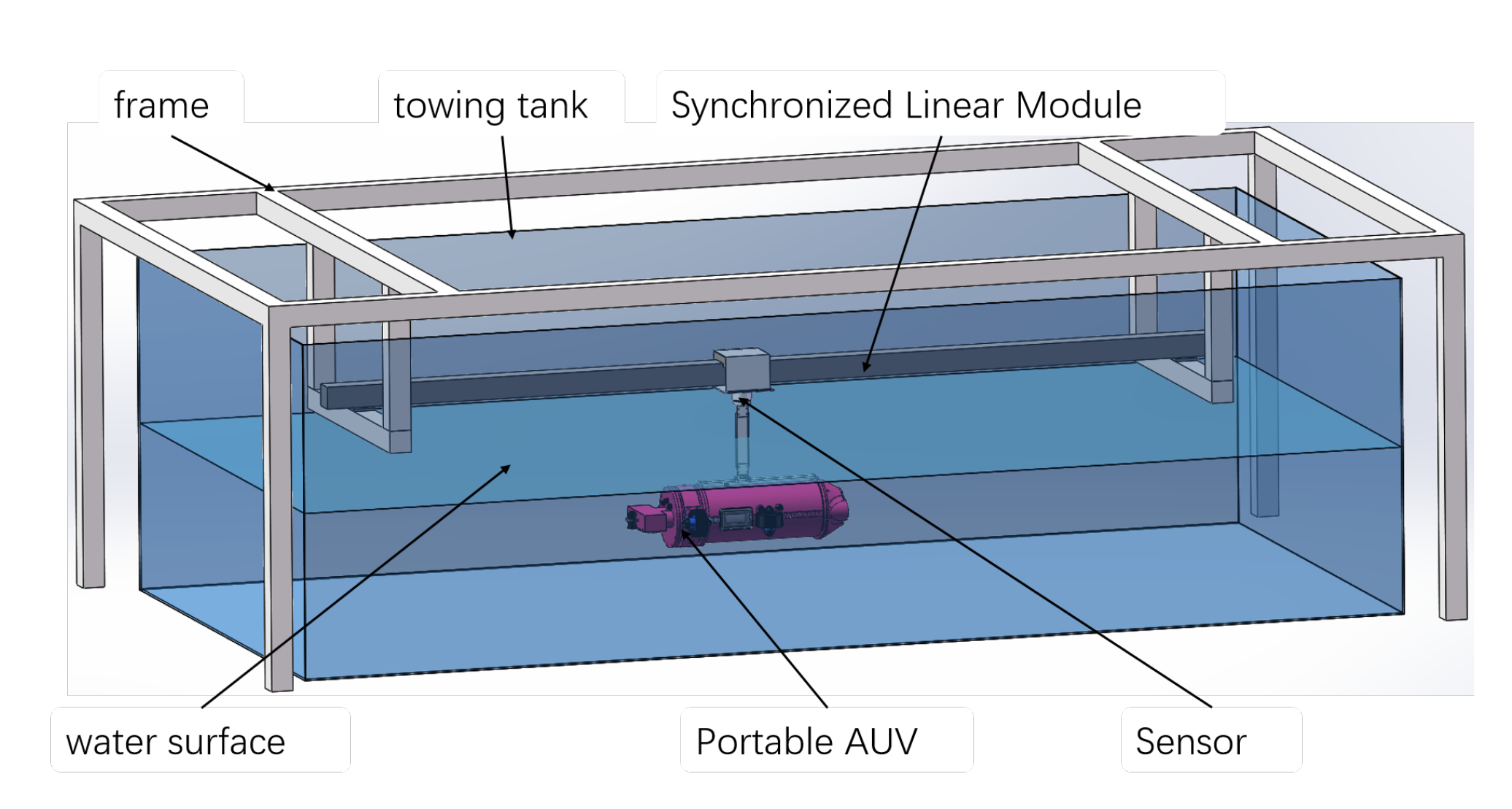
4.2.1. Design of Physical Experimental Platform
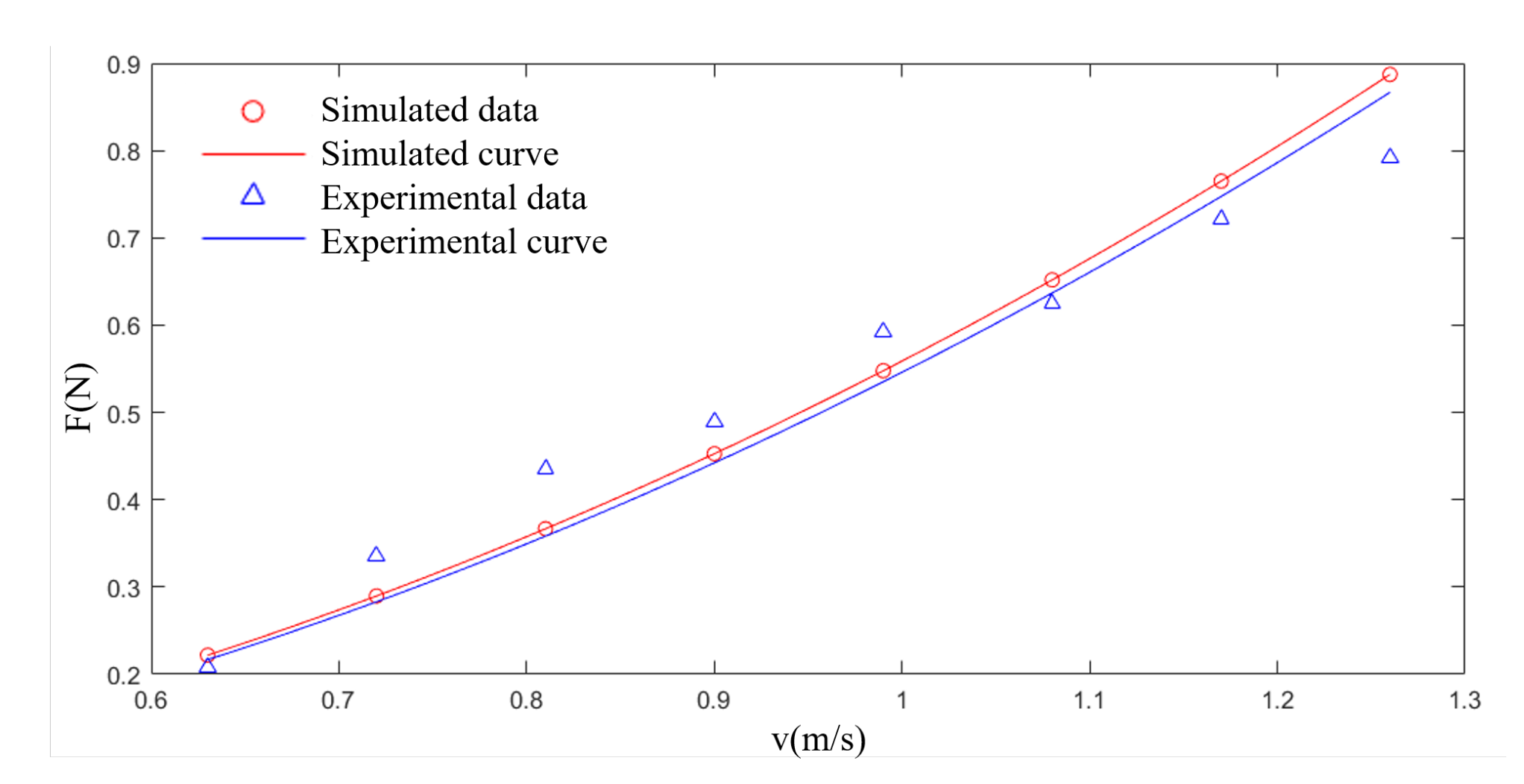
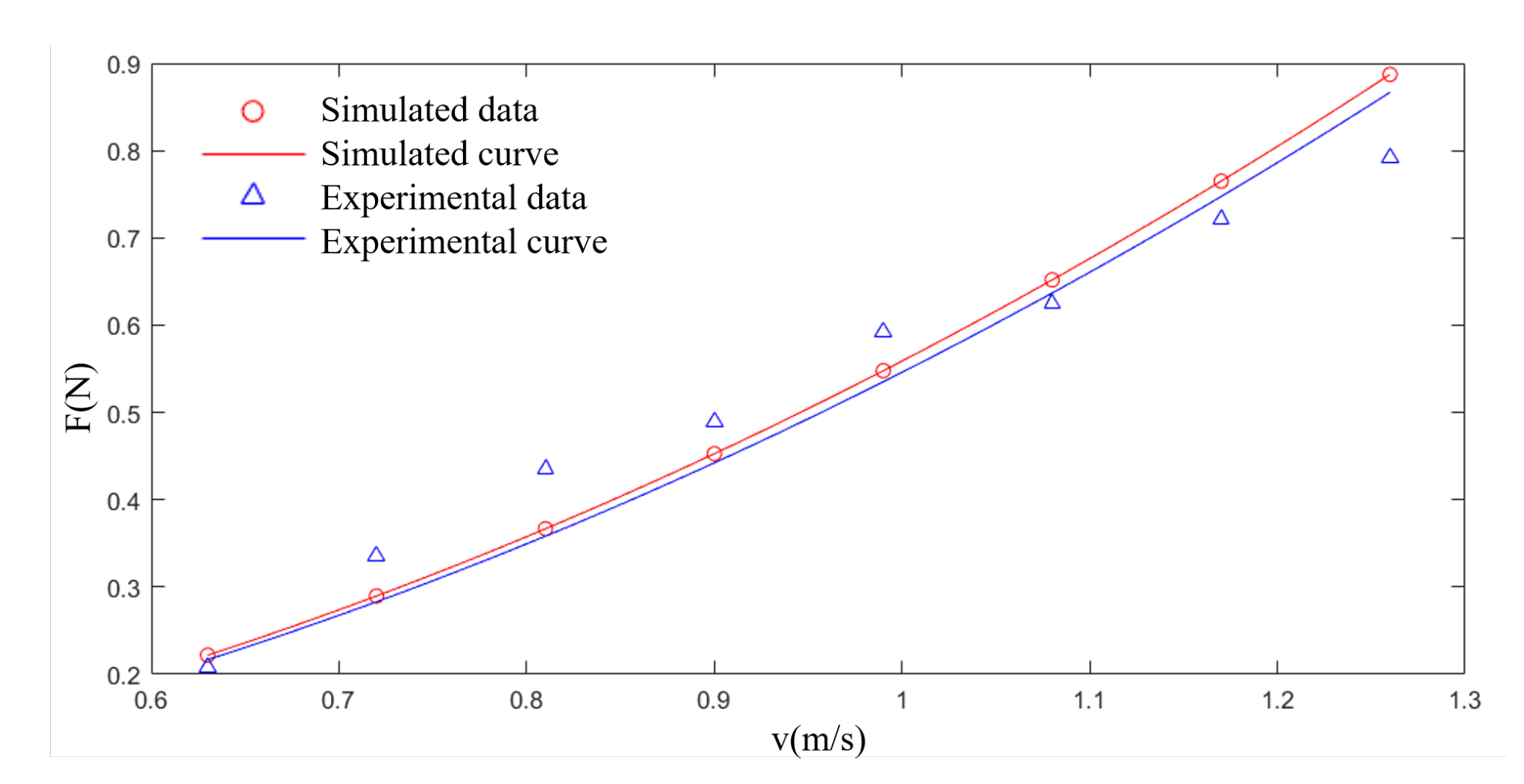
4.2.2. Validation of Physical Experimental Platform
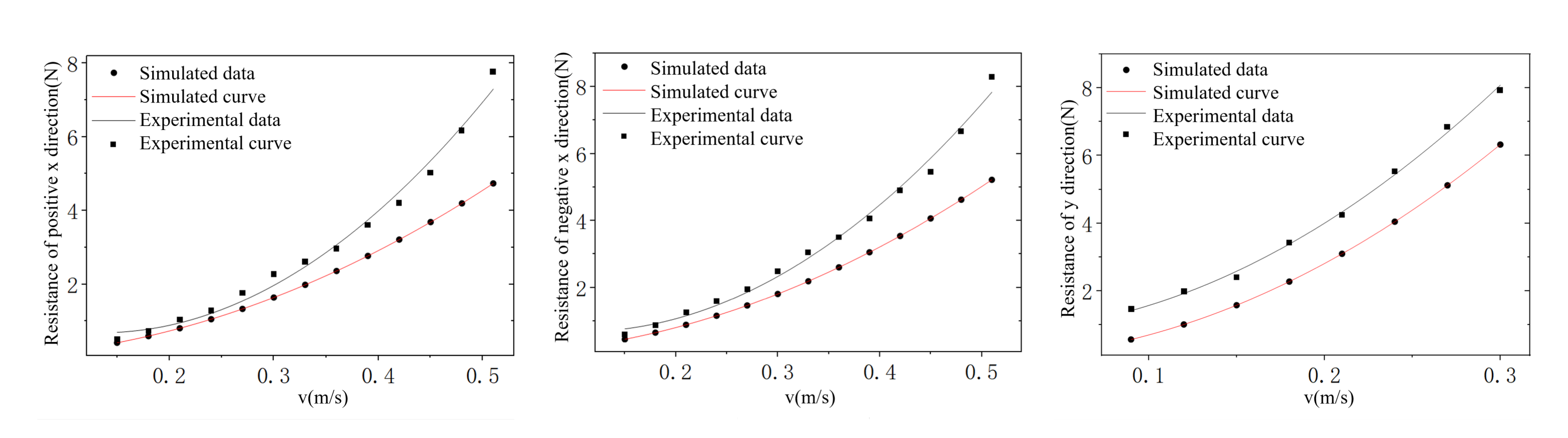
4.2.3. Hydrodynamic Performance Investigation of the Shark-AUV Based on Our Physical Experiment Platform
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Locker, T. Water Dance; Houghton Mifflin Harcourt: Boston, MA, USA, 1997; Volume 132. [Google Scholar]
- Jaffe, J.S.; Franks, P.J.; Roberts, P.L.; Mirza, D.; Schurgers, C.; Kastner, R.; Boch, A. A swarm of autonomous miniature underwater robot drifters for exploring submesoscale ocean dynamics. Nat. Commun. 2017, 8, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Yuh, J. Design and control of autonomous underwater robots: A survey. Auton. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Botelho, S.; Neves, R.; Taddei, L. Localization of a fleet of auvs using visual maps. In Proceedings of the Europe Oceans 2005, Brest, France, 20–23 June 2005; Volume 2, pp. 1320–1325. [Google Scholar]
- Wang, X.; Yang, C.; Ju, Z.; Ma, H.; Fu, M. Robot manipulator self-identification for surrounding obstacle detection. Multimed. Tools Appl. 2017, 76, 6495–6520. [Google Scholar] [CrossRef] [Green Version]
- Cao, X.; Sun, H.; Jan, G.E. Multi-AUV cooperative target search and tracking in unknown underwater environment. Ocean Eng. 2018, 150, 1–11. [Google Scholar] [CrossRef]
- Anderson, B.; Crowell, J. Workhorse AUV-a cost-sensible new autonomous underwater vehicle for surveys/soundings, search & rescue, and research. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; pp. 1–6. [Google Scholar]
- Gibson, S.B.; Stilwell, D.J. Hydrodynamic Parameter Estimation for Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2018, 45, 385–394. [Google Scholar] [CrossRef]
- Sajedi, Y.; Bozorg, M. Robust estimation of hydrodynamic coefficients of an AUV using Kalman and H∞ filters. Ocean Eng. 2019, 182, 386–394. [Google Scholar] [CrossRef]
- de Barros, E.A.; Dantas, J.L.; Pascoal, A.M.; de Sá, E. Investigation of normal force and moment coefficients for an AUV at nonlinear angle of attack and sideslip range. IEEE J. Ocean. Eng. 2008, 33, 538–549. [Google Scholar] [CrossRef]
- Sabet, M.T.; Daniali, H.M.; Fathi, A.; Alizadeh, E. Identification of an autonomous underwater vehicle hydrodynamic model using the extended, cubature, and transformed unscented Kalman filter. IEEE J. Ocean. Eng. 2017, 43, 457–467. [Google Scholar] [CrossRef]
- Allotta, B.; Costanzi, R.; Pugi, L.; Ridolfi, A. Identification of the main hydrodynamic parameters of Typhoon AUV from a reduced experimental dataset. Ocean Eng. 2018, 147, 77–88. [Google Scholar] [CrossRef]
- Jagadeesh, P.; Murali, K.; Idichandy, V. Experimental investigation of hydrodynamic force coefficients over AUV hull form. Ocean Eng. 2009, 36, 113–118. [Google Scholar] [CrossRef]
- Battista, T.; Woolsey, C.; Perez, T.; Valentinis, F. A dynamic model for underwater vehicle maneuvering near a free surface. IFAC-PapersOnLine 2016, 49, 68–73. [Google Scholar] [CrossRef]
- Saeidinezhad, A.; Dehghan, A.; Manshadi, M.D. Experimental investigation of hydrodynamic characteristics of a submersible vehicle model with a non-axisymmetric nose in pitch maneuver. Ocean Eng. 2015, 100, 26–34. [Google Scholar] [CrossRef]
- Hai, H.; Zexing, Z.; Jiyong, L.; Qirong, T.; Wanli, Z.; Wang, G. Investigation on the mechanical design and manipulation hydrodynamics for a small sized, single body and streamlined I-AUV. Ocean Eng. 2019, 186, 106106. [Google Scholar] [CrossRef]
- Julca Avila, J.; Nishimoto, K.; Mueller Sampaio, C.; Adamowski, J.C. Experimental investigation of the hydrodynamic coefficients of a remotely operated vehicle using a planar motion mechanism. J. Offshore Mech. Arct. Eng. 2012, 134, 021601. [Google Scholar] [CrossRef]
- Nouri, N.M.; Mostafapour, K.; Bahadori, R. An apparatus to estimate the hydrodynamic coefficients of autonomous underwater vehicles using water tunnel testing. Rev. Entific Instrum. 2016, 87, 191–233. [Google Scholar] [CrossRef]
- Kepler, M.E.; Pawar, S.; Stilwell, D.J.; Brizzolara, S.; Neu, W.L. Assessment of AUV Hydrodynamic Coefficients from Analytic and Semi-Empirical Methods. In Proceedings of the OCEANS 2018 MTS/IEEE, Charleston, SC, USA, 22–25 October 2018; pp. 1–9. [Google Scholar]
- Cardenas, P.; de Barros, E.A. Estimation of AUV Hydrodynamic Coefficients Using Analytical and System Identification Approaches. IEEE J. Ocean. Eng. 2020, 45, 1157–1176. [Google Scholar] [CrossRef]
- Mansoorzadeh, S.; Javanmard, E. An investigation of free surface effects on drag and lift coefficients of an autonomous underwater vehicle (AUV) using computational and experimental fluid dynamics methods. J. Fluids Struct. 2014, 51, 161–171. [Google Scholar] [CrossRef]
- Phillips, A.; Furlong, M.; Turnock, S.R. The use of Computational Fluid Dynamics to Determine the Dynamic Stability of an Autonomous Underwater Vehicle. 2007; Available online: https://eprints.soton.ac.uk/48786/1/ABP_NUTTS.pdf (accessed on 1 February 2021).
- Singh, Y.; Bhattacharyya, S.K.; Idichandy, V.G. CFD approach to steady state analysis of an underwater glider. In Proceedings of the 2014 Oceans, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Singh, Y.; Bhattacharyya, S.; Idichandy, V. CFD approach to modelling, hydrodynamic analysis and motion characteristics of a laboratory underwater glider with experimental results. J. Ocean Eng. Sci. 2017, 2, 90–119. [Google Scholar] [CrossRef]
- Gao, T.; Wang, Y.; Pang, Y.; Chen, Q.; Tang, Y. A time-efficient CFD approach for hydrodynamic coefficient determination and model simplification of submarine. Ocean Eng. 2018, 154, 16–26. [Google Scholar] [CrossRef]
- Safari, H.; Abbaspour, M.; Darbandi, M. Numerical study to evaluate the important parameters affecting the hydrodynamic performance of manta ray’s in flapping motion. Appl. Ocean Res. 2021, 109, 102559. [Google Scholar] [CrossRef]
- Castillo-Zamora, J.J.; Camarillo-Gómez, K.A.; Pérez-Soto, G.I.; Rodríguez-Reséndiz, J.; Morales-Hernández, L.A. Mini-AUV Hydrodynamic Parameters Identification via CFD Simulations and Their Application on Control Performance Evaluation. Sensors 2021, 21, 820. [Google Scholar] [CrossRef]
- Deng, F.; Levi, C.; Yin, H.; Duan, M. Identification of an Autonomous Underwater Vehicle hydrodynamic model using three Kalman filters. Ocean Eng. 2021, 229, 108962. [Google Scholar] [CrossRef]
- Panda, J.P.; Mitra, A.; Warrior, H.V. A review on the hydrodynamic characteristics of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 15–29. [Google Scholar]
- Shariati, S.K.; Mousavizadegan, S.H. The effect of appendages on the hydrodynamic characteristics of an underwater vehicle near the free surface. Appl. Ocean Res. 2017, 67, 31–43. [Google Scholar] [CrossRef]
- Tian, W.; Song, B.; Ding, H. Numerical research on the influence of surface waves on the hydrodynamic performance of an AUV. Ocean Eng. 2019, 183, 40–56. [Google Scholar] [CrossRef]
- Gabl, R.; Davey, T.; Cao, Y.; Li, Q.; Li, B.; Walker, K.L.; Giorgio-Serchi, F.; Aracri, S.; Kiprakis, A.; Stokes, A.A.; et al. Hydrodynamic loads on a restrained ROV under waves and current. Ocean Eng. 2021, 234, 109279. [Google Scholar] [CrossRef]
- Kim, J.; Kim, K.; Choi, H.; Seong, W.; Lee, K.Y. Estimation of hydrodynamic coefficients for an AUV using nonlinear observers. IEEE J. Ocean. Eng. 2002, 27, 830–840. [Google Scholar] [CrossRef]
- Tamura, K. Study on the blockage correction. J. Soc. Nav. Archit. Jpn. 1972, 1972, 17–28. [Google Scholar] [CrossRef]
- Dias, F.; Dyachenko, A.I.; Zakharov, V.E. Theory of weakly damped free-surface flows: A new formulation based on potential flow solutions. Phys. Lett. A 2008, 372, 1297–1302. [Google Scholar] [CrossRef] [Green Version]
- Hashimoto, H.; Yoneda, S.; Omura, T.; Umeda, N.; Matsuda, A.; Stern, F.; Tahara, Y. CFD prediction of wave-induced forces on ships running in irregular stern quartering seas. Ocean Eng. 2019, 188, 106277. [Google Scholar] [CrossRef]
- Soares, C.G. Representation of double-peaked sea wave spectra. Ocean Eng. 1984, 11, 185–207. [Google Scholar] [CrossRef]
- Liu, H.L.; Huang, T.T. Summary of DARPA SUBOFF Experimental Program Data; Technical Report; Naval Surface Warfare Center Carderock Div Bethesda Md Hydromechanics: Bethesda, MD, USA, 1998. [Google Scholar]
- Garcia de la Torre, J.; Carrasco, B. Hydrodynamic properties of rigid macromolecules composed of ellipsoidal and cylindrical subunits. Biopolym. Orig. Res. Biomol. 2002, 63, 163–167. [Google Scholar] [CrossRef] [PubMed]
- Willy, C.J. Attitude Control of an Underwater Vehicle Subjected to Waves. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1994. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Initial Setting of the Parameters |
|---|---|
| Time | Steady (unsteady) motion is steady (transient) state |
| Turbulence model | RNG model |
| Discrete format | Second-order upwind discrete scheme |
| Solving algorithm | PISO |
| Fluid type | Liquid, density is 998.2 kg/, others are default |
| Time step | 1500 steps in steady motion and 100 steps per cycle |
| in unsteady motion |
| 0.2 | 1.256 | −0.19240 | 0.10053 | 0.0198 | −0.0050 | −0.0055 | 0.0030 |
| 0.4 | 2.513 | −0.76961 | 0.20106 | 0.0892 | −0.0202 | −0.0180 | 0.0088 |
| 0.6 | 3.769 | −1.73162 | 0.30159 | 0.2011 | −0.0664 | −0.0240 | 0.0197 |
| 0.8 | 5.026 | −3.07843 | 0.40212 | 0.3413 | −0.1011 | −0.0359 | 0.0376 |
| 1 | 6.283 | −4.81005 | 0.50265 | 0.5016 | −0.1558 | −0.0397 | 0.0392 |
| Coefficients | Value | Coefficients | Value | Coefficients | Value | Coefficients | Value | Coefficients | Value | Coefficients | Value |
|---|---|---|---|---|---|---|---|---|---|---|---|
| −0.0131 | 0.5076 | 0 | 0.0007 | 0.0009 | 0.0003 | ||||||
| −0.3618 | −0.6681 | −0.2036 | 0.0754 | −0.1936 | −0.0138 | ||||||
| −0.1043 | −0.0948 | 0 | −0.0773 | −0.0131 | 0.0138 | ||||||
| 0.0147 | −0.0007 | 0 | −0.0227 | −0.1043 | −0.0289 | ||||||
| −0.0007 | −0.0754 | 0.0044 | 0 | −0.1550 | −0.0219 | ||||||
| 0.0131 | −0.0017 | −0.0056 | −0.0754 | −0.3805 | 0.0852 | ||||||
| 0.1043 | −0.3467 | 0.0852 | −0.0852 | −0.0172 | −0.0718 | ||||||
| 0.0003 | 0.0351 | −0.1126 | 0.0047 | 0 | 0.0216 | ||||||
| 0 | 0.0043 | −0.0179 | −0.0131 | −0.3389 | 0.0001 | ||||||
| 0.0391 | 0.0097 |
| Speed (kont) | 5.92 | 10.00 | 11.84 | 13.92 | 16.00 | 17.99 |
|---|---|---|---|---|---|---|
| NSWCCD results (N) | 87.4 | 242.2 | 332.9 | 451.5 | 576.9 | 697.0 |
| RNG k- results (N) | 92.59 | 244.86 | 335.84 | 454.76 | 590.63 | 736.10 |
| Error(%) | 5.94 | 1.10 | 0.88 | 0.72 | 2.38 | 5.61 |
| SST k- results (N) | 89.73 | 237.71 | 325.85 | 441 | 573.38 | 713.01 |
| Error(%) | 2.67 | 1.85 | 2.12 | 2.33 | 0.78 | 2.3 |
| Hydrodynamic Coefficient | ||||
|---|---|---|---|---|
| Numerical solution | −0.0266 | −0.0230 | −8.466 × 10−5 | 0.0232 |
| Standard solution | −0.0268 | −0.0186 | 0 | 0.0186 |
| Error (%) | 0.7 | 23.7 | 0 | 24.7 |
| Parameters | Parameters Setting |
|---|---|
| Size | L = 1.786 m, D = 0.27 m |
| Distance to the sea surface | 0.379 m |
| sailing speed in the surface waves | = 0 m/s, = 0.489 m/s, = 0.733 m/s |
| Amplitude of the waves | = 0.014 m, = 0.028 m, = 0.037 m |
| Circle frequency range of the waves | w = 1.200 to 7.207 rad/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, L.; Fang, R.; Cai, X.; Wang, X. Numerical Investigation on Hydrodynamic Performance of a Portable AUV. J. Mar. Sci. Eng. 2021, 9, 812. https://doi.org/10.3390/jmse9080812
Hong L, Fang R, Cai X, Wang X. Numerical Investigation on Hydrodynamic Performance of a Portable AUV. Journal of Marine Science and Engineering. 2021; 9(8):812. https://doi.org/10.3390/jmse9080812
Chicago/Turabian StyleHong, Lin, Renjie Fang, Xiaotian Cai, and Xin Wang. 2021. "Numerical Investigation on Hydrodynamic Performance of a Portable AUV" Journal of Marine Science and Engineering 9, no. 8: 812. https://doi.org/10.3390/jmse9080812
APA StyleHong, L., Fang, R., Cai, X., & Wang, X. (2021). Numerical Investigation on Hydrodynamic Performance of a Portable AUV. Journal of Marine Science and Engineering, 9(8), 812. https://doi.org/10.3390/jmse9080812