
A Decision Support Tool for Long-Term Planning of Marine Operations in Ocean Energy Projects



Abstract
:1. Introduction
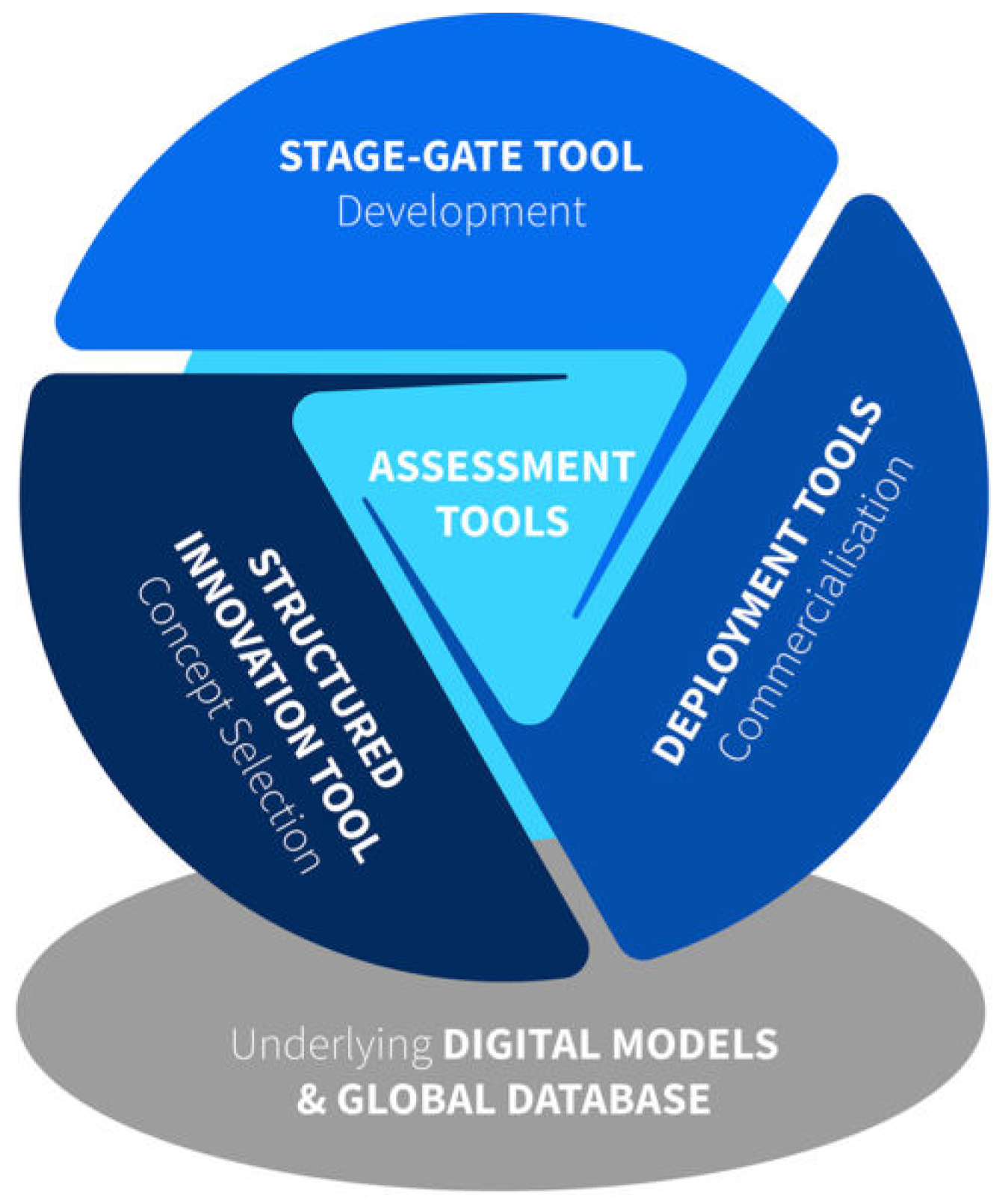
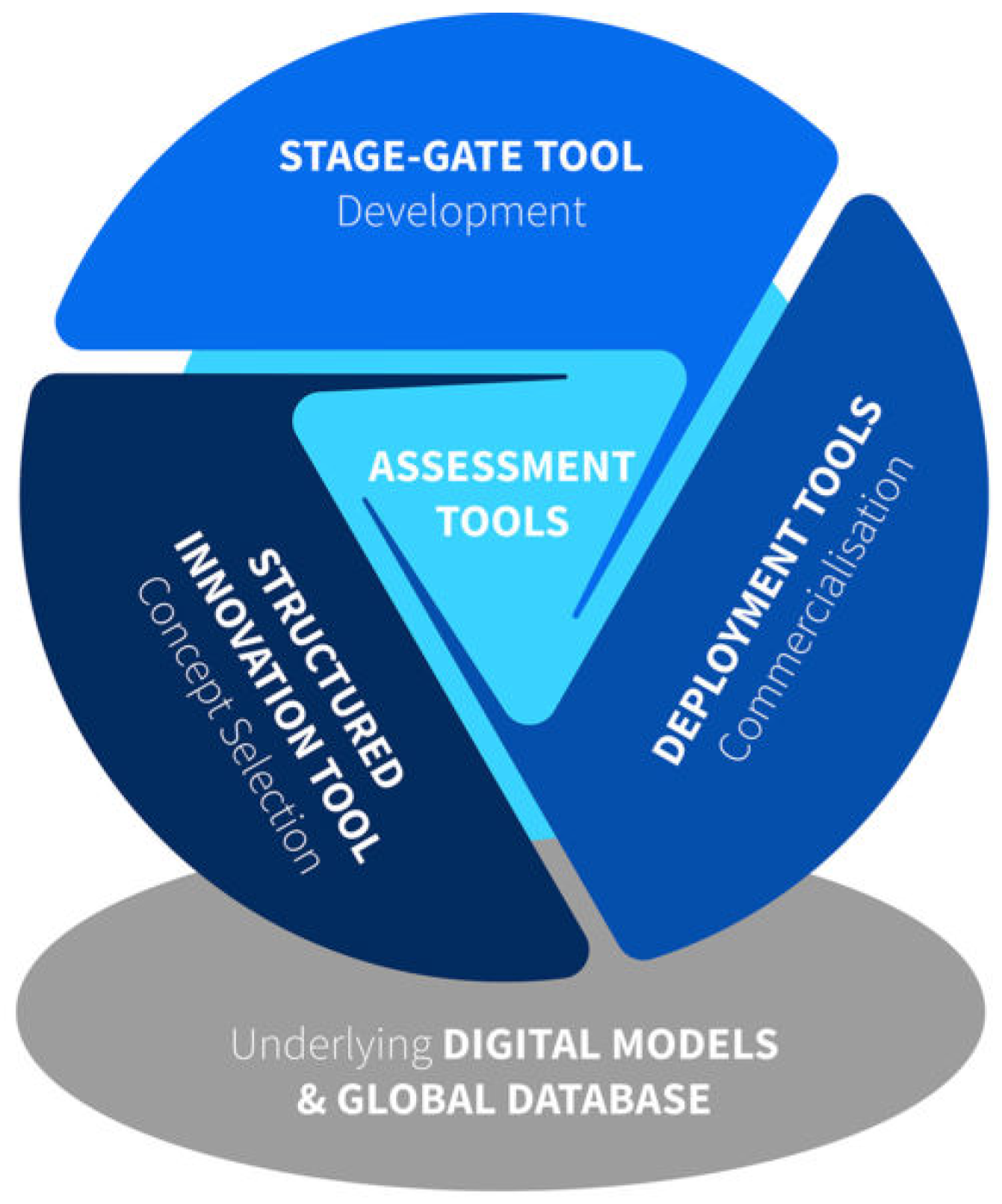
2. DTOceanPlus Suite of Design Tools
- Structured Innovation tool, to support innovation and the selection of technology concepts;
- Stage Gate tool, to guide technology developers in their technology development process;
- Deployment Design design tools, to support optimal device and array deployment:
- -
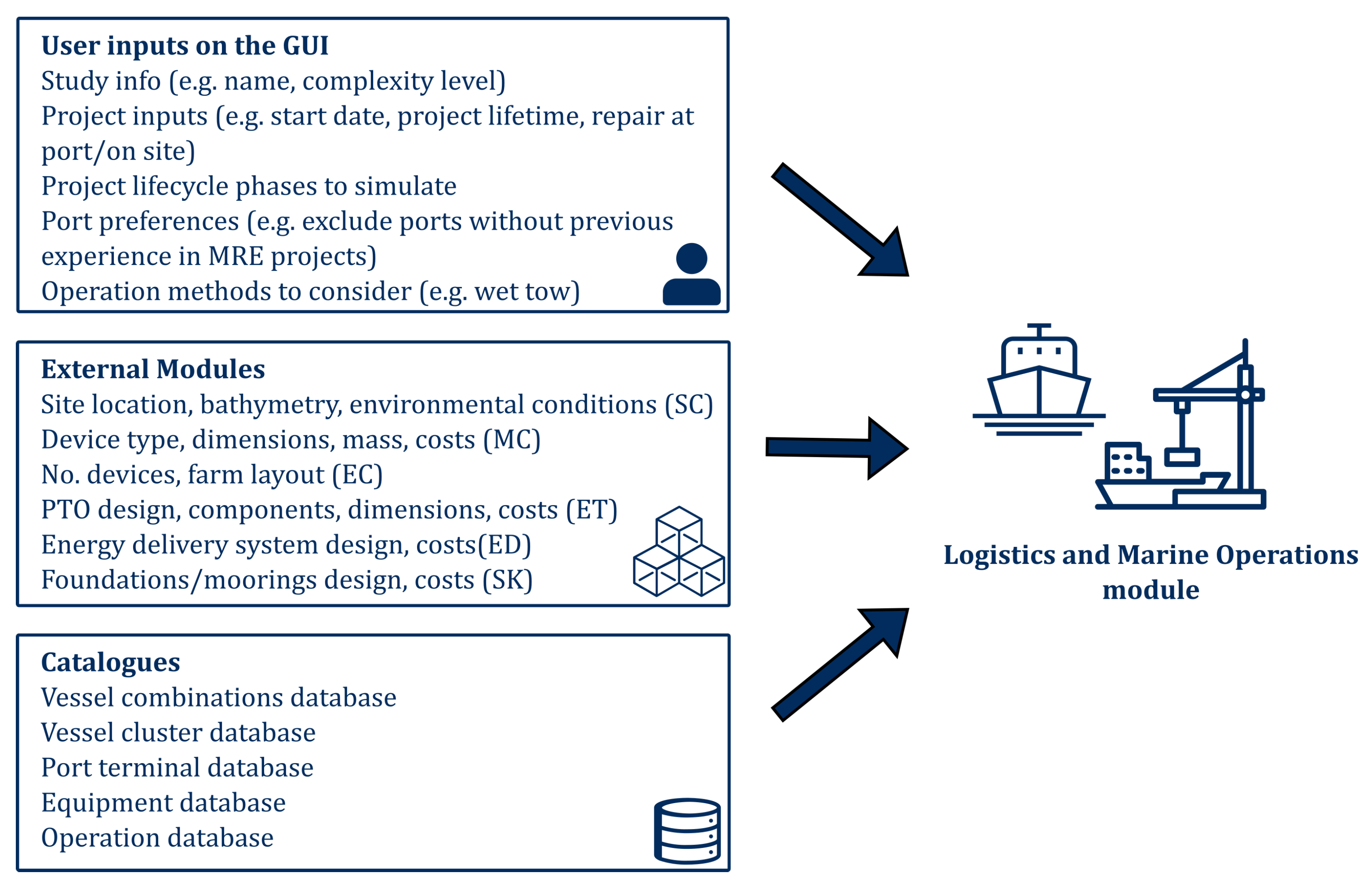
- Site Characterization (SC), to characterize the deployment site in respect to environmental (e.g., met-ocean) and geotechnical conditions;
- -
- Machine Characterization (MC), to characterize the device’s prime mover;
- -
- Energy Capture (EC), to design and optimize the device hydrodynamics at an array level;
- -
- Energy Transformation (ET), to design the Power Take-off (PTO) unit and control strategies;
- -
- Energy Delivery (ED), to design the electrical power transmission system of the farm;
- -
- Station Keeping (SK), to produce foundations and mooring designs;
- -
- Logistics and Marine Operations (LMO), to design logistical solutions related to the installation, operation, maintenance, and dismantling operations.
- Assessment design tools, devised to evaluate ocean energy projects in respect to key metrics:
- -
- System Performance and Energy Yield (SPEY), to assess projects in respect to their energy performance;
- -
- System Lifetime Costs (SLC), to assess projects from the economic and financial investment perspectives;
- -
- System Reliability, Availability, Maintainability, Survivability (RAMS), to evaluate different reliability aspects of ocean energy projects;
- -
- Environmental and Social Acceptance (ESA), to evaluate ocean energy projects in respect to their environmental and social impacts.
- Underlying digital models to provide a standard framework for the description of ocean energy sub-systems, as well as a global database with reference data from various sources.
3. Logistics and Marine Operations Module
3.1. Operating Principle
3.2. Compilation of Operations and Logistic Requirements
3.3. Infrastructure Pre-Selection
3.3.1. Feasible Infrastructure
3.3.2. Fleet Selection Methodology
- Main vessels: vessels that play a central role in the operation, being responsible for key activities such as lifting and transporting components, driving a monopile, and installing a cable, to name a few. These vessels are thus assessed in respect to their main attributes (e.g., deck area, crane capabilities, etc.) depending on the vessel type and operation plan.
- Tow vessels: vessels that are responsible for towing a device/structure (wet tow), or a non-propelled barge (dry tow). Tow vessels are assessed in terms of their bollard pull capabilities, which must be sufficiently large to meet the estimated bollard pull requirements for safely towing an object or barge.
- Support vessels: vessels that can be used to support lifts, control marine traffic, and assist device positioning, but do not have a central role in the operation itself.
3.3.3. Infrastructure Matching
3.4. Definition of Activity Sequence
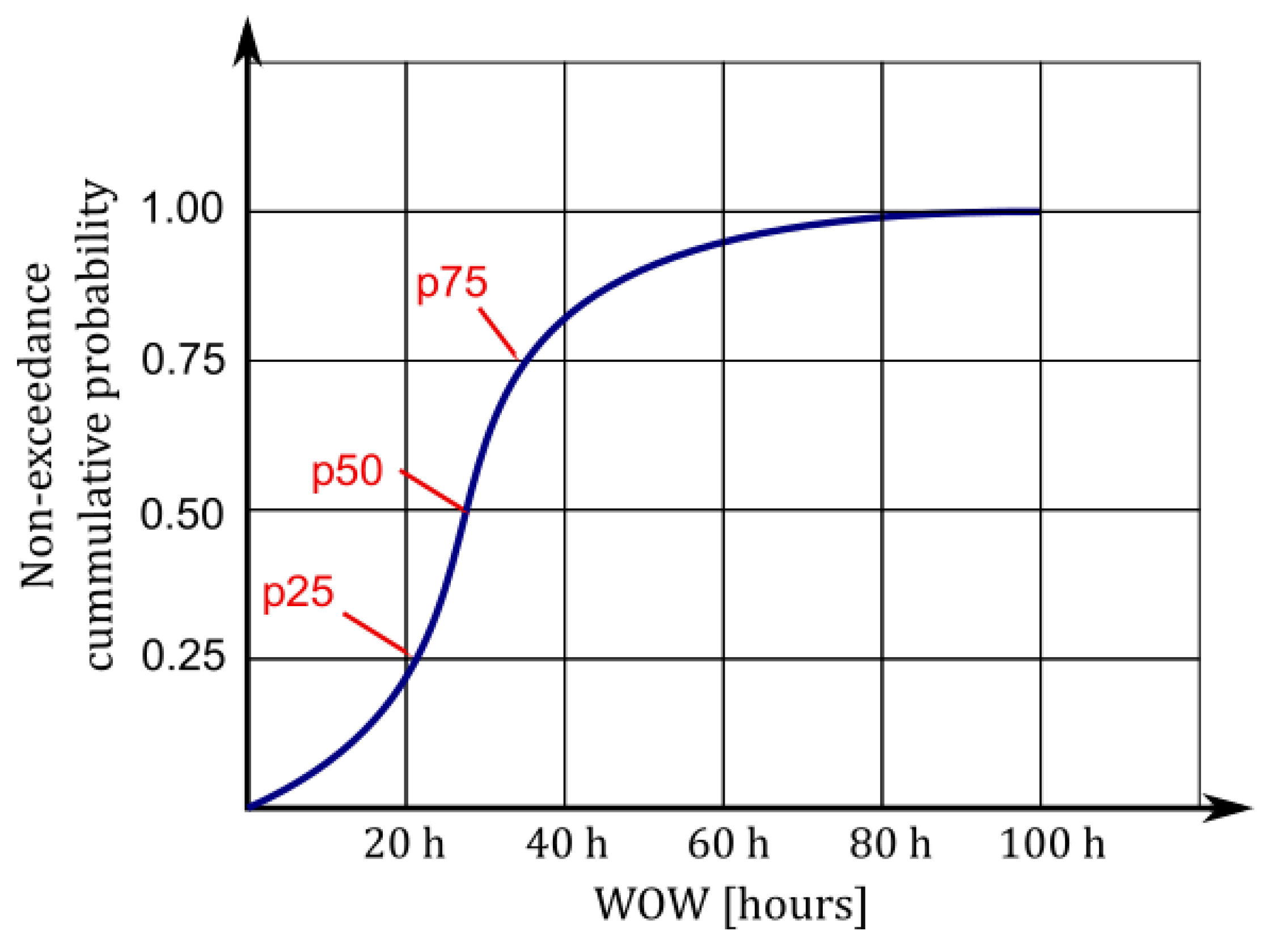
3.5. Weather Window Model
3.6. Calculation of Operation Costs
3.6.1. Vessel Costs
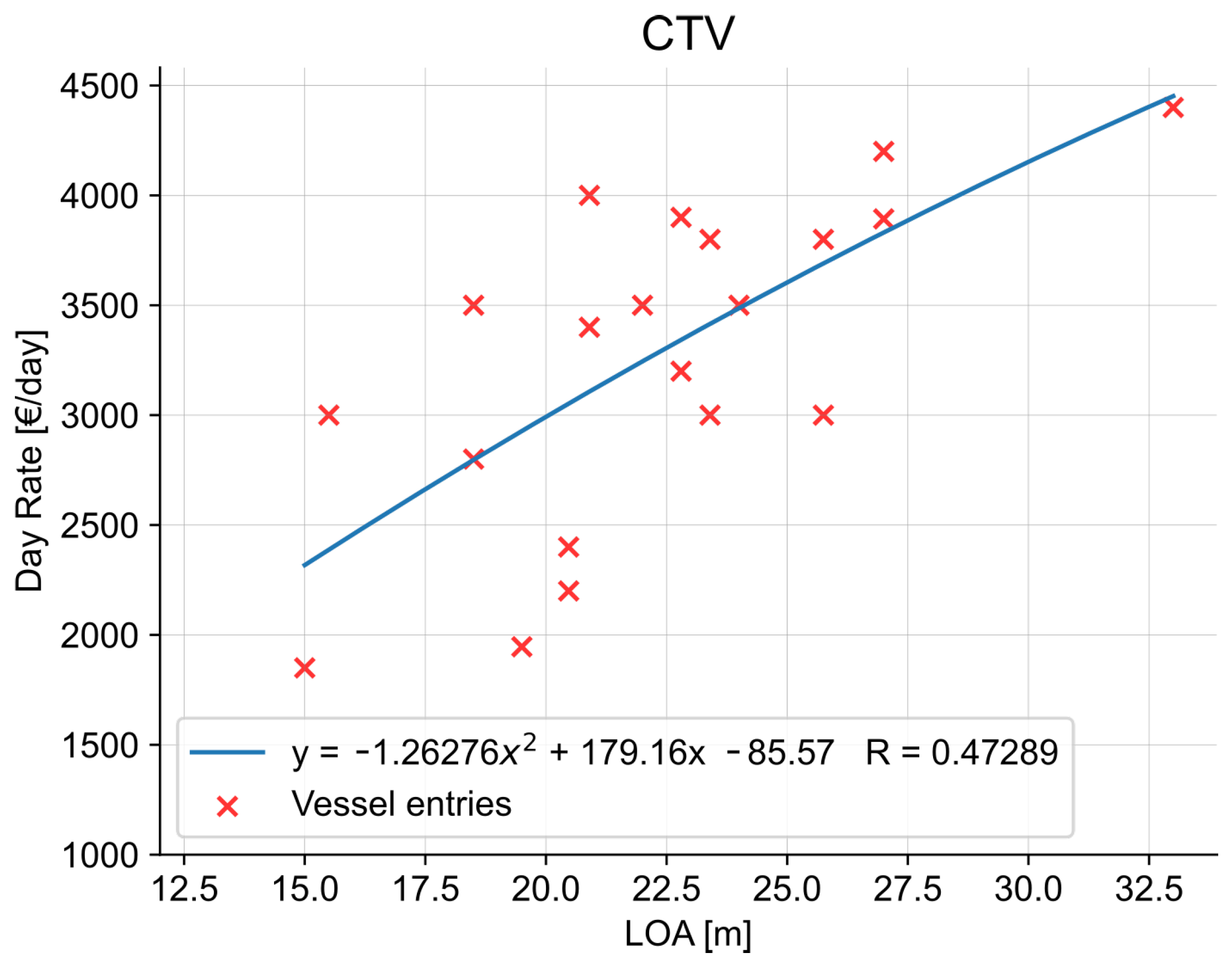
3.6.2. Daily Vessel Charter Rates
3.6.3. Daily Vessel Fuel Costs
3.6.4. Equipment Costs
3.6.5. Spare Part Costs
3.6.6. Port Terminal Costs
3.6.7. Total Operation Costs
3.7. Operation Calendarization
4. Case Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
| 1 | In DTOceanPlus, in the occurrence of array cable failure, it is assumed that the entire array cable is replaced. However, for export cables, it is assumed that the damaged section is repaired instead. |
| 2 | Engineering, Procurement, Construction and Installation |
| 3 | Transport and Installation |
| 4 | Anchor Handling Tug Supply vessel |
| 5 | Cable Laying Vessel |
| 6 | Crew Transport Vessel |
| 7 | Dive Support Vessel |
| 8 | Platform Supply Vessel |
| 9 | Service Offshore Vessel |
References
- United Nations Framework Convention on Climate Change. The Paris Agreement. 2015. Available online: https://unfccc.int/sites/default/files/english_paris_agreement.pdf (accessed on 21 January 2020).
- Gerbaulet, C.; von Hirschhausen, C.; Kemfert, C.; Lorenz, C.; Oei, P.Y. European electricity sector decarbonization under different levels of foresight. Renew. Energy 2019, 141, 973–987. [Google Scholar] [CrossRef]
- Zeyringer, M.; Fais, B.; Keppo, I.; Price, J. The potential of marine energy technologies in the UK—Evaluation from a systems perspective. Renew. Energy 2018, 115, 1281–1293. [Google Scholar] [CrossRef]
- Widén, J.; Carpman, N.; Castellucci, V.; Lingfors, D.; Olauson, J.; Remouit, F.; Bergkvist, M.; Grabbe, M.; Waters, R. Variability assessment and forecasting of renewables: A review for solar, wind, wave and tidal resources. Renew. Sustain. Energy Rev. 2015, 44, 356–375. [Google Scholar] [CrossRef]
- Dias, F.; Renzi, E.; Gallagher, S.; Sarkar, D.; Wei, Y.; Abadie, T.; Cummins, C.; Rafiee, A. Analytical and computational modelling for wave energy systems: The example of oscillating wave surge converters. Acta Mech. Sin. 2017, 33, 647–662. [Google Scholar] [CrossRef] [Green Version]
- Ocean Energy Forum. Ocean Energy Strategic Roadmap 2016, Building Ocean Energy for Europe. 2016. Available online: https://www.oceanenergy-europe.eu/wp-content/uploads/2017/10/OEF-final-strategic-roadmap.pdf (accessed on 6 November 2020).
- European Commission. Blue Energy—Action Needed to Deliver on the Potential of Ocean Energy in European Seas and Oceans by 2020 and Beyond. Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions. 2014. Available online: https://op.europa.eu/en/publication-detail/-/publication/e4aea330-19b7-42d8-9d5c-0da648e76792 (accessed on 26 July 2021).
- Shafiee, M. Maintenance logistics organization for offshore wind energy: Current progress and future perspectives. Renew. Energy 2015, 77, 182–193. [Google Scholar] [CrossRef]
- Thomsen, K.E. Offshore Wind a Comprehensive Guide to Successful Offshore Wind Farm Installation, 2nd ed.; Academic Press: Cambridge, MA, USA, 2014; p. 404. [Google Scholar]
- Irawan, C.A.; Ouelhadj, D.; Jones, D.; Stålhane, M.; Sperstad, I.B. Optimisation of maintenance routing and scheduling for offshore wind farms. Eur. J. Oper. Res. 2017, 256, 76–89. [Google Scholar] [CrossRef] [Green Version]
- Carroll, J.; McDonald, A.; Dinwoodie, I.; McMillan, D.; Revie, M.; Lazakis, I. Availability, Operation & Maintenance Costs of Offshore Wind Turbines with Different Drive Train Configurations. Wind Energy 2017, 20, 361–378. [Google Scholar] [CrossRef] [Green Version]
- Gray, A. Modelling Operations and Maintenance Strategies for Wave Energy Arrays; University of Exeter: Exeter, UK, 2017; p. 315. [Google Scholar]
- Ahn, D.; Shin, S.C.; Kim, S.Y.; Kharoufi, H.; Kim, H.C. Comparative evaluation of different offshore wind turbine installation vessels for Korean west–south wind farm. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 45–54. [Google Scholar] [CrossRef]
- Morandeau, M.; Walker, R.T.; Argall, R.; Nicholls-Lee, R.F. Optimisation of marine energy installation operations. Int. J. Mar. Energy 2013, 3–4, 14–26. [Google Scholar] [CrossRef]
- BVG Associates. Value Breakdown for the Offshore Wind Sector. In Commissioned for Renewables Advisory Board; February 2010; pp. 1–20. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/48171/2806-value-breakdown-offshore-wind-sector.pdf (accessed on 26 July 2021).
- Poulsen, T.; Hasager, C.; Jensen, C. The Role of Logistics in Practical Levelized Cost of Energy Reduction Implementation and Government Sponsored Cost Reduction Studies: Day and Night in Offshore Wind Operations and Maintenance Logistics. Energies 2017, 10, 464. [Google Scholar] [CrossRef] [Green Version]
- Low Carbon Innovation Coordination Group. Carbon Innovation Coordination Group Technology Innovation Needs Assessment (TINA) Marine Energy Summary Report; Technical Report; August 2012. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/593459/Technology_Innovation_Needs_Assessment___Marine.pdf (accessed on 26 July 2021).
- Soukissian, T.; Denaxa, D.; Karathanasi, F.; Prospathopoulos, A.; Sarantakos, K.; Iona, A.; Georgantas, K.; Mavrakos, S. Marine Renewable Energy in the Mediterranean Sea: Status and Perspectives. Energies 2017, 10, 1512. [Google Scholar] [CrossRef] [Green Version]
- Dalgic, Y.; Lazakis, I.; Turan, O. Vessel charter rate estimation for offshore wind O&M activities. In Proceedings of the 15th International Congress of the International Maritime Association of the Mediterranean IMAM 2013. Developments in Maritime Transportation and Exploitation of Sea Resources, A Coruna, Spain, 14–17 October 2013; pp. 899–907. [Google Scholar] [CrossRef] [Green Version]
- Walker, R.T.; Van Nieuwkoop-Mccall, J.; Johanning, L.; Parkinson, R.J. Calculating weather windows: Application to transit, installation and the implications on deployment success. Ocean Eng. 2013, 68, 88–101. [Google Scholar] [CrossRef]
- Gray, A. What Are Operations and Maintenance Simulation Tools?—An Explanation of O&M Models in the Offshore Renewable Energy Sector. August 2020. Available online: https://ore.catapult.org.uk/app/uploads/2020/08/OM_Model_Review_Paper_FINAL.pdf (accessed on 26 July 2021).
- Welte, T.M.; Sperstad, I.B.; Halvorsen-Weare, E.E.; Netland, Ø.; Nonås, L.M.; Stålhane, M. Operation and Maintenance Modelling. In Offshore Wind Energy Technology; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2018; pp. 269–303. [Google Scholar] [CrossRef] [Green Version]
- James Fisher. Mojo Mermaid. Available online: http://www.mojomermaid.com/ (accessed on 6 November 2020).
- JBA Consulting. ForeCoast Marine. Available online: https://www.forecoastmarine.com/ (accessed on 6 November 2020).
- StormGEO Ltd. StormGEO S-Planner. Available online: https://www.stormgeo.com/products/s-suite/s-planner/ (accessed on 6 November 2020).
- Teillant, B.; Chainho, P.; Raventos, A.; Nava, V.; Jeffrey, H. A Decision Supporting Tool for the Lifecycle Logistics of Ocean Energy Arrays. In Proceedings of the 5th International Conference on Ocean Energy, Halifax, Canada, 4–6 November 2014. [Google Scholar]
- Teillant, B.; Chainho, P.; Raventos, A.; Sarmento, A.; Jeffrey, H. Characterization of the logistic requirements for the marine renewable energy sector. In Proceedings of the 1st International Conference on Renewable Energies Offshore, Lisbon, Portugal, 24–26 November 2014. [Google Scholar]
- Rademakers, L.W.M.M.; Braam, H.; Obdam, T.S. Estimating Costs of Operation & Maintenance for Offshore Wind Farms. 2008. Available online: https://repository.tudelft.nl/islandora/object/uuid:ff4a94c7-5f57-4872-aba2-aad622656c16 (accessed on 26 July 2021).
- Athanasios, K.; Feargal, B. ROMEO-Review of Existing Cost and O&M Models, and Development of a High-Fidelity Cost/revenue Model for Impact Assessment. 2018. Available online: https://www.romeoproject.eu/wp-content/uploads/2018/12/D8.1_ROMEO_Report-reviewing-exsiting-cost-and-OM-support-models.pdf (accessed on 25 January 2021).
- Hofmann, M.; Sperstad, I.B. NOWIcob—A Tool for Reducing the Maintenance Costs of Offshore Wind Farms. Energy Procedia 2013, 35, 177–186. [Google Scholar] [CrossRef] [Green Version]
- SINTEF. Decision Support Tools. Available online: https://www.sintef.no/projectweb/marwind/dst/ (accessed on 25 January 2021).
- Gutierrez-Alcoba, A.; Ortega, G.; Hendrix, E.M.; Halvorsen-Weare, E.E.; Haugland, D. A model for optimal fleet composition of vessels for offshore wind farm maintenance. Procedia Comput. Sci. 2017, 108, 1512–1521. [Google Scholar] [CrossRef]
- Shoreline. Design Entire Wind Farms by Simulating, Modelling and Analysing Scenarios in a Risk-Free Virtual Environment. Available online: https://www.shoreline.no/solutions/design/ (accessed on 24 January 2021).
- Dalgic, Y.; Dinwoodie, I.; Lazakis, I.; McMillan, D.; Revie, M. Optimum CTV Fleet Selection for Offshore Wind Farm O&M Activities. In Proceedings of the ESREL 2014, Wroclaw, Poland, 14–18 September 2014; p. 9. [Google Scholar]
- Dalgic, Y.; Lazakis, I.; Dinwoodie, I.; McMillan, D.; Revie, M.; Majumder, J. The influence of multiple working shifts for offshore wind farm O&M activities—STRATHOW-OM Tool. In Proceedings of the Design and Operation of Offshore Wind Farm Support Vessels, London, UK, 28–29 January 2015; p. 9. Available online: https://www.researchgate.net/publication/271525141_The_influence_of_multiple_working_shifts_for_offshore_wind_farm_OM_activities_-_StrathOW-OM_Tool (accessed on 26 July 2021).
- Douard, F.; Domecq, C.; Lair, W. A Probabilistic Approach to Introduce Risk Measurement Indicators to an Offshore Wind Project Evaluation—Improvement to an Existing Tool Ecume. Energy Procedia 2012, 24, 255–262. [Google Scholar] [CrossRef] [Green Version]
- Paterson, J. Metocean Risk Analysis in Offshore Wind Installation. Ph.D. Thesis, University of Edinburgh, Scotland, UK, 2018. Available online: https://era.ed.ac.uk/handle/1842/35981/ (accessed on 15 July 2021).
- Wave Energy Scotland. Operations and Maintenance Simulation Tool: User Guide. 2017. Available online: https://www.waveenergyscotland.co.uk/media/1182/wes-om-tool-user-guide_rev1.pdf (accessed on 10 December 2020).
- Sperstad, I.B.; Stålhane, M.; Dinwoodie, I.; Endrerud, O.E.V.; Martin, R.; Warner, E. Testing the robustness of optimal access vessel fleet selection for operation and maintenance of offshore wind farms. Ocean Eng. 2017, 145, 334–343. [Google Scholar] [CrossRef] [Green Version]
- Grzegorzewska, P. First Results of the Study on the Impact of Open Source|Joinup. Available online: https://joinup.ec.europa.eu/collection/open-source-observatory-osor/news/first-results-study-impact-open-source (accessed on 26 July 2021).
- Fraunhofer ISI. European Commission: Open Source Study (First Results). Available online: https://openforumeurope.org/wp-content/uploads/2020/11/OFE_Fraunhofer_OS_impact_study_5_Nov.pdf (accessed on 26 July 2021).
- European Commission. Advanced Design Tools for Ocean Energy Systems Innovation, Development and Deployment|Projects|H2020|CORDIS. 2018. Available online: https://cordis.europa.eu/project/rcn/214811_en.html (accessed on 21 December 2020).
- The University of Edinburgh. DTOcean FP7-ENERGY EU Project: Optimal Design Tools for Ocean Energy Arrays. Available online: https://cordis.europa.eu/project/id/608597 (accessed on 26 July 2021).
- The DTOcean Developers. DTOcean: Optimal Design Tools for Ocean Energy Arrays. Available online: https://dtocean.github.io/ (accessed on 11 December 2020).
- Teillant, B.; Chainho, P.; Vrousos, C.; Charbonier, K.; Ybert, S.; Giebhardt, J. Deliverable 5.6: Report on Logistical Model for Ocean Energy and Considerations. 2016. Available online: https://www.dtoceanplus.eu/content/download/2541/file/DTO_WP5_ECD_D5.6.pdf (accessed on 26 July 2021).
- Correia da Fonseca, F.X.; Amaral, L.M.B.; Rentschler, M.U.T.; Arede, F.; Chainho, P.; Yang, Y.; Noble, D.R.; Petrov, A.; Nava, V.; Germain, N.; et al. Logistics and Marine Operations Tools—Alpha version. Public Deliverable D5.7, DTOceanPlus, May. Available online: https://www.dtoceanplus.eu/Publications/Deliverables/Deliverable-D5.7-Logistics-and-Marine-Operations-Tools-alpha-version (accessed on 16 July 2021).
- Yi, Y.; Nambiar, A.; Luxcey, N.; Correia da Fonseca, F.X.; Amaral, L. Reliability, Availability, Maintainability and Survivability Assessment Tool—Alpha Version. Public Deliverable D6.3, DTOceanPlus. 2020. Available online: https://www.dtoceanplus.eu/Publications/Deliverables/Deliverable-D6.3-Reliability-Availability-Maintainability-and-Survivability-Assessment-Tool-alpha-version (accessed on 16 July 2021).
- Raval, U.R.; Chaita, J. Implementing & Improvisation of K-means Clustering Algorithm. IJCSMC 2016, 5, 191–203. Available online: https://www.ijcsmc.com/docs/papers/May2016/V5I5201647.pdf.
- Teillant, B.; Raventos, A.; Chainho, P.; Victor, L.; Goormachtigh, J.; Collin, A.; Hardwick, J.; Weller, S.; Guerrini, M.; Giebhardt, J.; et al. Deliverable 5.2: Characterization of Logistic Requirements. 2014. [Google Scholar]
- Youen, K. Site Characterisation—Alpha Version. Public Deliverable D5.2, DTOceanPlus. 2020. Available online: https://www.dtoceanplus.eu/Publications/Deliverables/Deliverable-D5.2-Site-Characterisation-alpha-version (accessed on 16 July 2021).
- Chen, Y.; Cao, P.; Mukerji, P. Weather Window Statistical Analysis for Offshore Marine Operations. In Proceedings of the Eighteenth (2008) International Offshore and Polar Engineering Conference, Vancouver, BC, Canada, 6–11 July 2008; The International Society of Offshore and Polar Engineers (ISOPE): Vancouver, BC, Canada, 2008; p. 1. [Google Scholar]
- Det Norske Veritas (DNV). Modelling and Analysis of Marine Operations. Recommended Practices ed. RP-H103. 2011. Available online: https://rules.dnv.com/docs/pdf/DNVPM/codes/docs/2011-04/RP-H103.pdf (accessed on 26 July 2021).
- Ochi, M.K. Ocean Waves—The Stochastic Approach; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar] [CrossRef]
- Goda, Y. Random Seas and Design of Maritime Structures; World Scientific Publishing: Singapore, 2000. [Google Scholar] [CrossRef]
- Holthuijsen, L.H. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Sparks, N.J. IMAGE: A multivariate multi-site stochastic weather generator for European weather and climate. Stoch. Environ. Res. Risk Assess. 2018, 32, 771–784. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.C.; Zhang, Q.H. Joint probability distribution of winds and waves from wave simulation of 20 years ( 1989–2008 ) in Bohai Bay. Water Sci. Eng. 2018, 6, 296–307. [Google Scholar] [CrossRef]
- Sasaki, W.; Iwasaki, S.I.; Matsuura, T.; Iizuka, S. Recent increase in summertime extreme wave heights in the western North Pacific. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Kennedys. Notes from the Bar: BIMCO SUPPLYTIME 2017. Available online: https://kennedyslaw.com/thought-leadership/article/notes-from-the-bar-bimco-supplytime-2017/ (accessed on 30 December 2020).
- Harling, M.; Gard, W.; James, S. Future Trends in Procurement Strategy: The Influence of New Nuclear and Offshore Energy Projects. 2013. Available online: https://uk.practicallaw.thomsonreuters.com/3-549-1845?transitionType=Default&contextData=(sc.Default)&firstPage=true (accessed on 26 July 2021).
- Global Renewables Shipbrokers. Available online: https://www.grs-offshore.com/ (accessed on 10 January 2021).
- ECN. Energy Research Centre of the Netherlands. Available online: https://www.ecn.nl/energy-research/index.html (accessed on 4 January 2021).
- Lundh, M.; Garcia-Gabin, W.; Tervo, K.; Lindkvist, R. Estimation and Optimization of Vessel Fuel Consumption. IFAC PapersOnLine 2016, 49, 394–399. [Google Scholar] [CrossRef]
- Ship & Bunker. World Bunker Prices. Available online: https://shipandbunker.com/prices (accessed on 16 December 2020).
- Scottish Enterprise. Oil and Gas ’Seize the Opportunity’ Guides: Offshore Wind. Technical Report SE/4504/May16, Scottish Enterprise. 2016. Available online: https://www.offshorewindscotland.org.uk/media/1116/sesdi-oil-and-gas-div-guide-offshore-wind.pdf (accessed on 26 July 2021).
- Neary, V.S.; Previsic, M.; Jepsen, R.A.; Lawson, M.J.; Yu, Y.H.; Copping, A.E.; Fontaine, A.A.; Hallett, K.C.; Murray, D.K. Methodology for Design and Economic Analysis of Marine Energy Conversion (MEC) Technologies. 2014. Available online: https://energy.sandia.gov/wp-content/gallery/uploads/SAND2014-9040-RMP-REPORT.pdf (accessed on 21 January 2021).
- UK Met Office. Cartopy, a Cartographic Python Library with Matplotlib Support for Visualisation. Available online: https://pypi.org/project/Cartopy/ (accessed on 27 April 2021).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Organisation | Product Name | Open Source | Applicable to Ocean Energy | Weather Window Analysis | Infra- Structure Selection | Optimal Operation Plan | Inst | O&M | Decom. |
|---|---|---|---|---|---|---|---|---|---|
| DNV-GL | O2M | No | No | Hindcast | No | No | No | Yes | No |
| DNV-GL | OMCAM | No | No | Hindcast | No | No | No | Yes | No |
| ECN | ECN O&M Access | No | No | Forecast | No | No | No | Yes | No |
| DTOcean 1.0 /2.0 | DTO Logistics module [26,27] | Yes | Yes | Hindcast | P, V, E | Yes | Yes | Yes | No |
| DTOceanPlus | DTO+ LMO module | Yes | Yes | Hindcast | P, V, E | Yes | Yes | Yes | Yes |
| ECN (TNO) | ECN O&M Calculator (OMCE) [28] | No | No | Hindcast | No | No | No | Yes | No |
| Fraunhofer IWES | Multi-Agent-System | No | No | Hindcast | No | No | No | Yes | No |
| ROMEO | ROMEO O&M Tool [29] | N/A | No | Forecast | No | No | No | Yes | No |
| SINTEF Energy Research | NoWIcob [30] | No | No | Hindcast | V | No | No | Yes | No |
| SINTEF Ocean (MARINTEK) | Vessel fleet optimization models [31,32] | No | No | Hindcast | V | No | No | Yes | No |
| Shoreline | Shoreline Design [33] | No | No | Hindcast | No | No | Yes | Yes | No |
| Strathclyde University | StrathOW-OM [34,35] | No | No | Hindcast | No | No | No | Yes | No |
| EDF Group | ECUME-I [36,37] | No | No | Hindcast | No | No | No | Yes | No |
| Wave Energy Scotland | WES O&M Tool [38] | Yes | Yes | Hindcast | No | No | No | Yes | No |
| James Fisher and Sons | Mermaid [23] | No | Agnostic | Hindcast | No | No | - | - | - |
| JBA Consulting | ForeCoast Marine [24] | No | Agnostic | Hindcast | No | No | - | - | - |
| StormGEO | StormGEO S-Planner [25] | No | Agnostic | Forecast | No | No | - | - | - |
| Installation Operations | Maintenance Operations | Decommissioning Operations |
|---|---|---|
| Foundations installation | Topside inspection | Device removal |
| Moorings installation | Underwater inspection | Collection point removal |
| Support structures installation | Mooring inspection | Moorings removal |
| Collection point installation | Array cable inspection | Foundations removal |
| Export cable installation | Export cable inspection | |
| Array cable installation | Device retrieval | |
| Post-lay cable burial | Device repair at port | |
| External protection installation | Device redeployment | |
| Device installation | Device repair on site | |
| Mooring line replacement | ||
| Array cable replacement1 | ||
| Export cable repair |
| Method List | Defined by | Options | |||
|---|---|---|---|---|---|
| Transportation | User | Dry | Wet | - | - |
| Port load-out | User/Default | Lift | Float | Skidded | Railed |
| Cable burial | User/ED module | Ploughing | Jetting | Cutting | - |
| Burial sequence | User/Default | Simultaneous | Post-lay | - | - |
| Cable landfall | User/Default | OCT | HDD | - | - |
| Piling | User/Default | Hammering | Vibro-piling | Drilling | - |
| # | Port Terminal | Vessel | Piling Equipment | Cable Burial Equipment | ROV Equipment | Divers |
|---|---|---|---|---|---|---|
| 1 | Terminal type | Crane capacity | Depth rating | Depth rating | Depth rating | Depth rating |
| 2 | Terminal draught | Vessel draft | Pile sleeve diameter | Burial depth | ROV class | - |
| 3 | Terminal area | Bollard pull | Penetration depth | Cable diameter | - | - |
| 4 | Onshore crane capacity | DP class | Soil type | Cable MBR | - | - |
| 5 | Quay soil strength | Deck area | - | - | - | - |
| 6 | Max. distance to site | Deck strength | - | - | - | - |
| 7 | Past experience | Max. cargo | - | - | - | - |
| 8 | - | Turntable storage | - | - | - | - |
| 9 | - | Turntable capacity | - | - | - | - |
| 10 | - | Max. no. passengers | - | - | - | - |
| Terminal Parameter | Value |
|---|---|
| Terminal id | T114 |
| Name of Port | Viana do Castelo |
| Terminal name | Dry dock #1 |
| Country | Portugal |
| Terminal coordinates (lat, lon) | (41.675, −8.8383) |
| Experience in MRE projects | TRUE |
| Storage area [m2] | 100,000 |
| Slipway | TRUE |
| Terminal type | Dry-dock |
| Terminal width [m] | 32 |
| Terminal length [m] | 203 |
| Quay load bearing capacity [t/m2] | 0.8 |
| Terminal draught [m] | 3.5 |
| Terminal area [m2] | 6500 |
| Terminal hinterland area [m2] | 3300 |
| Gantry crane lift capacity [t] | 80 |
| Tower crane lift capacity [t] | 200 |
| Jack-up suitability | TRUE |
| Id | Type | Transportation | Qty | Main Vessel | Qty | Tow Vessel | Qty | Support Vessel |
| VC_001 | Device Installation | On deck | 1 | Propelled crane vessel | - | - | - | - |
| VC_002 | Device Installation | On deck | 1 | Jack-up Vessel | - | - | - | - |
| VC_003 | Device Installation | On deck | 1 | SOV Gangway | - | - | - | - |
| VC_004 | Device Installation | On deck | 1 | AHTS | - | - | - | - |
| VC_005 | Device Installation | Dry tow | 1 | Non propelled crane Vessel | 1 | Tug | - | - |
| VC_006 | Device Installation | Dry tow | 1 | Transport Barge | 1 | Tug | - | - |
| VC_007 | Device Installation | On deck | 1 | Semi-submersible | - | - | 1 | Multicat |
| VC_008 | Device Installation | Wet tow | - | - | 1 | AHTS | - | - |
| VC_009 | Device Installation | Wet tow | - | - | 2 | AHTS / Tug | - | - |
| VC_010 | Device Installation | Wet tow | - | - | 1 | AHTS / Tug | 1 | Multicat |
| VC_011 | Device Installation | Wet tow | - | - | 2 | AHTS / Tug | 1 | Multicat |
| VC_012 | Device Installation | Wet tow | - | - | 3 | AHTS / Tug | 1 | Multicat |
| ID | Activity Name | Next Activity | Duration [h] | Decision Paths |
| OP01_A0 | Mobilization | OP01_A1 | 48 | - |
| OP01_A1 | Vessel preparation & loading | T_C0 | 48 | - |
| T_C0 | cond_stat_methods:transport | T_C1_1;T_C1_2 | - | 0-dry;1-wet |
| T_C1_1 | cond_stat_methods:load_out | T_A0;T_A0;T_A1 | - | 0-float away;1-lift away;2-skidded/trailer |
| T_C1_2 | cond_stat_methods:load_out | T_A7;T_A4;T_A5 | - | 0-float away;1-lift away;2-skidded/trailer |
| T_A0 | Lift item onto vessel deck | T_D0 | 3 | - |
| T_A1 | Place item on steel rail/trailer | T_A2 | 2 | - |
| T_A2 | Translate item onto vessel deck | T_D0 | 2 | - |
| T_D0 | cond_dynam_deck full | T_D1;T_A3 | - | 0-false;1-true |
| T_D1 | cond_dynam_quay empty | T_C1_1;T_A3 | - | 0-false;1-true |
| T_A3 | Seafastening | T_A8 | 1 | - |
| T_A4 | Lift item from the quay to the water | T_A9 | 2 | - |
| T_A5 | Place item on marine slipway | T_A6 | 2 | - |
| T_A6 | Push/pull item to the water | T_A9 | 2 | - |
| T_A7 | Flood Dry-dock | T_A9 | 6 | - |
| T_A8 | Item transportation on vessel deck | OP01_A2 | transit_site | - |
| T_A9 | Item towed to site | OP01_A2 | tow | - |
| OP01_A2 | Positioning | OP01_C0 | 1 | - |
| OP01_C0 | cond_stat_object:type | OP01_A3;OP01_A6;OP01_A13 | 0-pile;1-suction caisson;2-gravity base | |
| OP01_A3 | Leveling and positioning of guiding template | P_C0 | 2 | - |
| P_C0 | cond_stat_methods:piling | P_A0;P_A4;P_A6 | - | 0-drilling;1-hammering;2-vibro-piling |
| P_A0 | Rig and pile leveling and positioning | P_A1 | 2 | - |
| P_A1 | Seafloor drilling | P_A2 | drill | - |
| P_A2 | Pile lowering into aperture | P_A3 | 1 | - |
| P_A3 | Flushing and grouting | OP01_A5 | 1 | - |
| P_A4 | Pile levelling and positioning | P_A5 | 1 | - |
| P_A5 | Hammering pile into seafloor | OP01_A5 | hammer | - |
| P_A6 | Pile levelling and positioning | P_A7 | 1 | - |
| P_A7 | Vibro-piling into seafloor | OP01_A5 | vibro | - |
| OP01_A5 | Removal of guiding template | OP01_D0 | 1 | - |
| OP01_A6 | Hosting | OP01_A7 | 2 | - |
| OP01_A7 | Lower caisson to seabed | OP01_A8 | 1 | - |
| OP01_A8 | Penetration into seabed due to weight | OP01_C1 | 2 | - |
| OP01_C1 | cond_stat_requirements:rov | OP01_A9;OP01_A11 | - | 0-inspection;1-work |
| OP01_A9 | Pump water from caisson | OP01_A10 | 2 | - |
| OP01_A10 | Undock suction pump | OP01_D0 | 1 | - |
| OP01_A11 | Pump water from caisson with ROV | OP01_A12 | 2 | - |
| OP01_A12 | Undock suction pump ROV | OP01_D0 | 0.2 | - |
| OP01_A13 | Hosting | OP01_A14 | 2 | - |
| OP01_A14 | Lowering GBA to seabed | OP01_D0 | 1 | - |
| OP01_D0 | cond_dynam_deck empty | OP01_A15;OP01_A16 | - | 0-false;1-true |
| OP01_A15 | Transit to next site | OP01_A2 | 0.2 | - |
| OP01_A16 | Transit from site to port | OP01_D1 | transit_port | - |
| OP01_D1 | cond_dynam_quay empty | OP01_A1;OP01_A17 | - | 0-false;1-true |
| OP01_A17 | Demobilization | 48 | - |
| Installation Method | Very Soft Clay | Soft Clay | Firm Clay | Stiff Clay | Very Stiff Clay | Hard Clay | Very Loose Sand | Loose Sand | Medium Dense Sand | Dense Sand | Very Dense Sand | Gravels & Pebbles |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Jetting | 450 | 450 | 250 | 0 | 0 | 0 | 300 | 300 | 200 | 0 | 0 | 0 |
| Ploughing | 0 | 375 | 500 | 550 | 550 | 300 | 100 | 100 | 350 | 100 | 100 | 300 |
| Cutting | 0 | 325 | 325 | 75 | 75 | 75 | 0 | 0 | 275 | 275 | 275 | 0 |
| Dredging | 150 | 100 | 75 | 50 | 50 | 50 | 150 | 150 | 100 | 75 | 75 | 75 |
| Surface lay | 700 | 700 | 700 | 700 | 700 | 700 | 700 | 700 | 700 | 700 | 700 | 700 |
| Installation Method | Very Soft Clay | Soft Clay | Firm Clay | Stiff Clay | Very Stiff Clay | Hard Clay | Very Loose Sand | Loose Sand | Medium Dense Sand | Dense Sand | Very Dense Sand | Gravels & Pebbles |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Drilling | 0 | 0 | 0.65 | 0.5 | 0.5 | 0.25 | 0 | 0 | 0 | 0 | 0 | 0 |
| Hammering | 15 | 12.5 | 7.5 | 4.5 | 4.5 | 0 | 20 | 20 | 15 | 5 | 5 | 5 |
| Vibro-driving | 175 | 75 | 0 | 0 | 0 | 0 | 375 | 375 | 250 | 75 | 75 | 75 |
| Suction pump | 200 | 100 | 0 | 0 | 0 | 0 | 375 | 375 | 250 | 100 | 100 | 0 |
| ROV with jetting | 475 | 475 | 250 | 0 | 0 | 0 | 250 | 250 | 250 | 0 | 0 | 0 |
| Jan | Feb | Mar | Apr | May | Jun | Jul | Aug | Sep | Oct | Nov | Dec | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| WOW (p50, in h) | 43 | 38 | 22 | 15 | 14 | 10 | 8 | 8 | 15 | 39 | 55 | 64 |
| Total duration (h) | 73 | 68 | 52 | 45 | 44 | 40 | 38 | 38 | 45 | 69 | 85 | 94 |
| Vessel Type | Input Parameter | Domain Validity | Function | R2 |
|---|---|---|---|---|
| Tug | Bollard Pull (tonnes) | 0.9611 | ||
| Multicat | LOA (m) | 0.96626 | ||
| = 10,000 | ||||
| AHTS4 | Bollard Pull (tonnes) | 0.6857 | ||
| CLV5 | Total cable storage (ton) | 10,000 | 53,090 | 0.4716 |
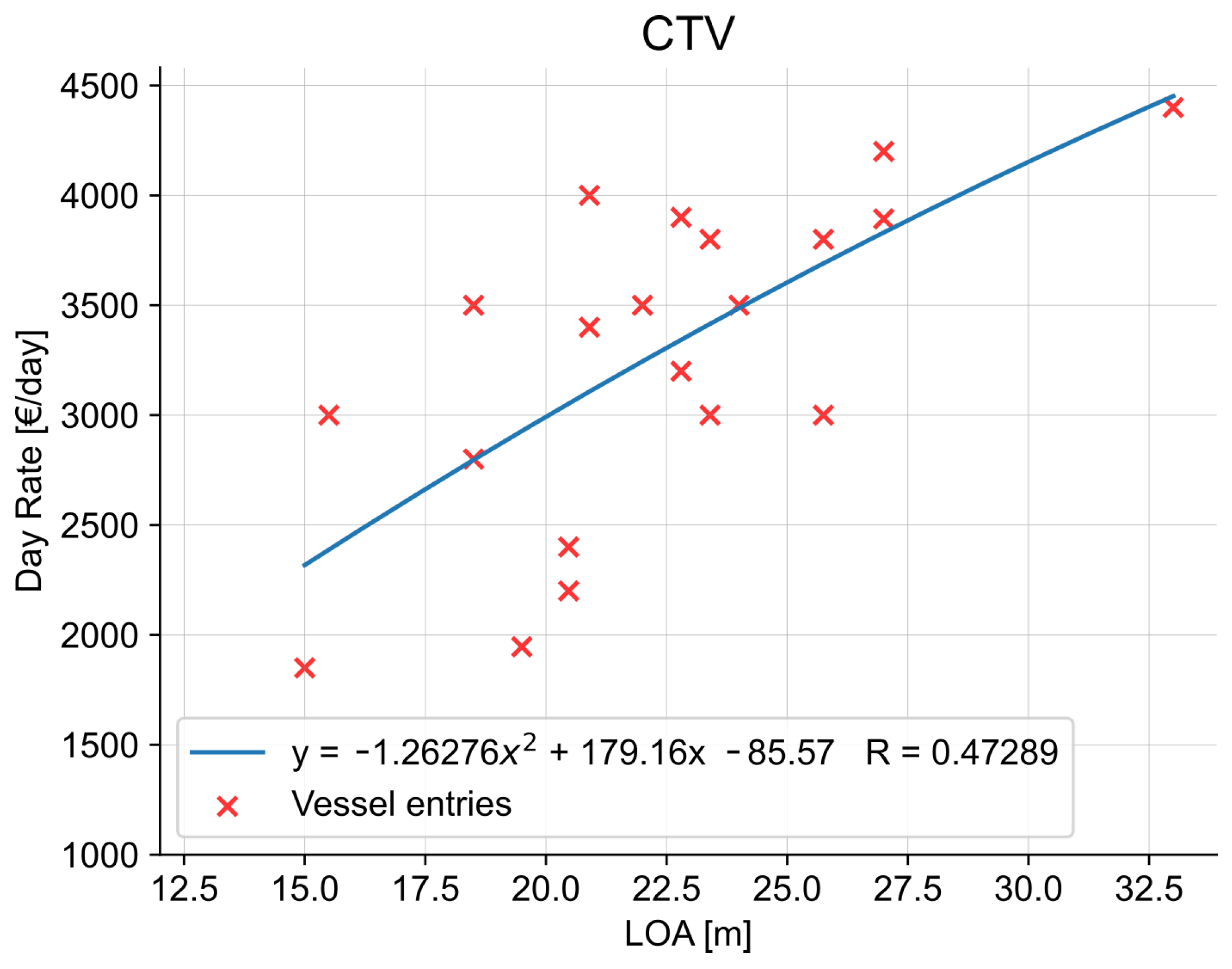
| CTV6 | LOA (m) | 0.4729 | ||
| DSV7 | LOA (m) | = 4308.81 exp(0.02x) | 0.96580 | |
| Guard Vessel | Service speed (knots) | 0.99948 | ||
| Non-propelled Barge | Barge dimensions | 19,950 | 0.87829 | |
| Jack-up vessel | Crane lift capacity (tonnes) | 21,448.41 | 0.77216 | |
| 372,275 | ||||
| 128,892 | ||||
| Propelled crane vessel | Crane lift capacity (tonnes) | 12,714.58 | 0.99548 | |
| Non-propelled crane vessel | Crane lift capacity (tonnes) | 0.55486 | ||
| 85,536.50 | ||||
| PSV8 | Free Deck Space (m2) | 1.00 | ||
| Rock Dumper | Stone cargo capacity (tonnes) | 69,212 | 69,212.41 | 0.26059 |
| SOV9 with gangway | No. Passengers | 24,000 | N.D. | |
| 50,000 | ||||
| SOV gangway relevant | No. Passengers | 24,000 | N.D. | |
| 42,000 | ||||
| Survey vessel | LOA (m) | 0.66484 |
| ID | Name | Periodicity (Years) | Device Shutdown |
|---|---|---|---|
| 1 | Topside inspection | 1 | Yes |
| 2 | Underwater inspection | 2 | Yes |
| 3 | Mooring inspection | 1 | Yes |
| 4 | Array cable inspection | 2 | No |
| 5 | Export cable inspection | 4 | No |
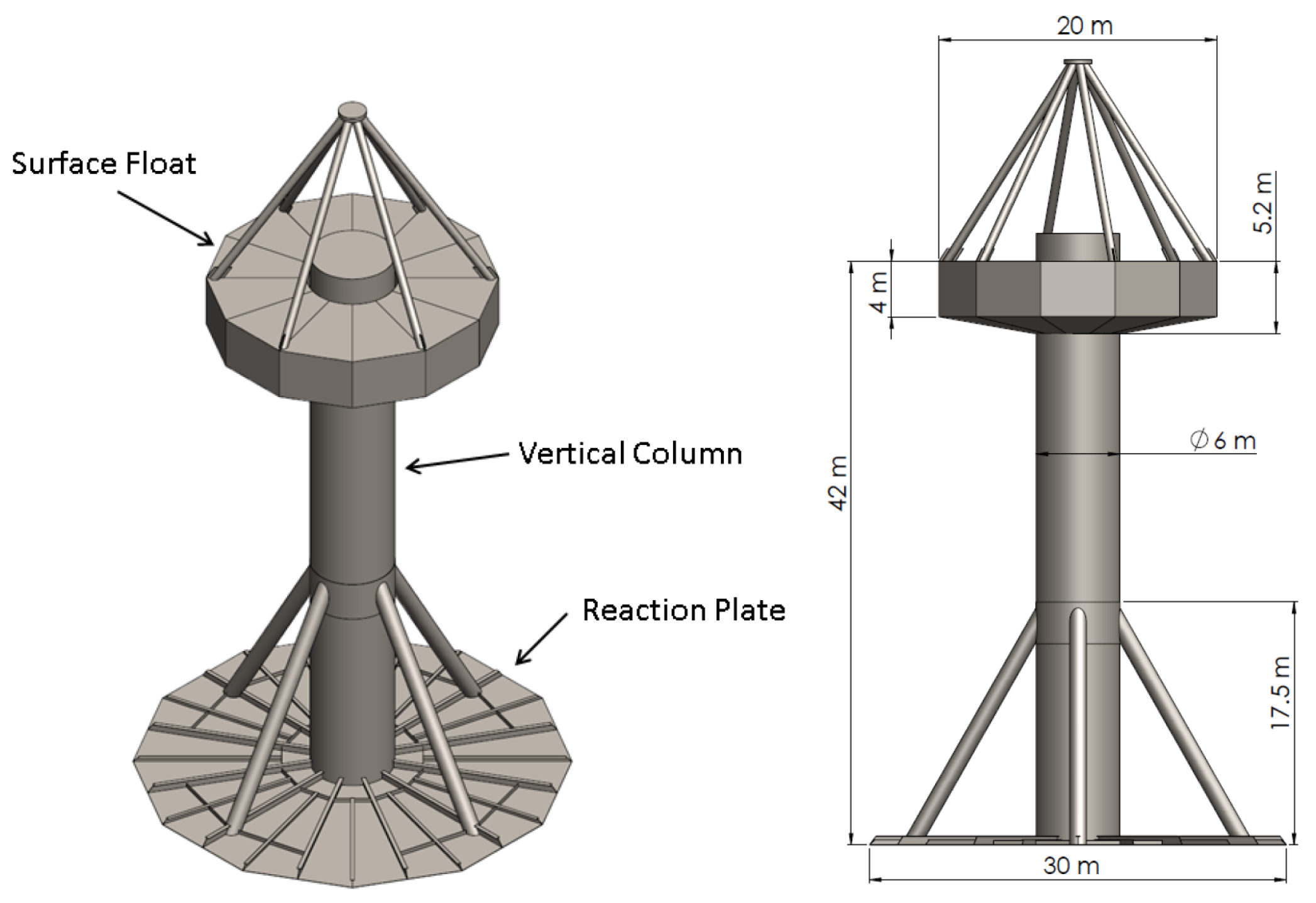
| Component | No. | Type | Mass | Length | Width | Height | Draft | Tow draft |
|---|---|---|---|---|---|---|---|---|
| Device | 1 | Floating WEC | 680,000 kg | 30 m | 30 m | 42 m | 35 m | 15 m |
| Component | No. | Type | Mass | Length | Width | Height | ||
| Anchor | 3 | Drag-anchor | 9,535 kg | 5.472 m | 5.898 m | 3.291 m | ||
| Component | No. | Material | Mass | Length | Diameter | |||
| Mooring line | 3 | Nylon | 4,703 kg | 340.7 m | 0.146 m | |||
| Component | No. | Type | Mass | Length | Diameter | Voltage | MBR | Burial depth |
| Power cable | 1 | Export | 8,700 kg | 6,680 m | 0.079 m | 3.3 kV | 1.15 m | 0.5 m |
| Operation | Mooring Installation | Cable Installation | Device Installation |
|---|---|---|---|
| Operation sequence | 1st | 2nd | 3rd |
| Number of vessels | 1 | 1 | 2 |
| Selected vessels | AHTS | Cable Laying Vessel | Tug, Tug |
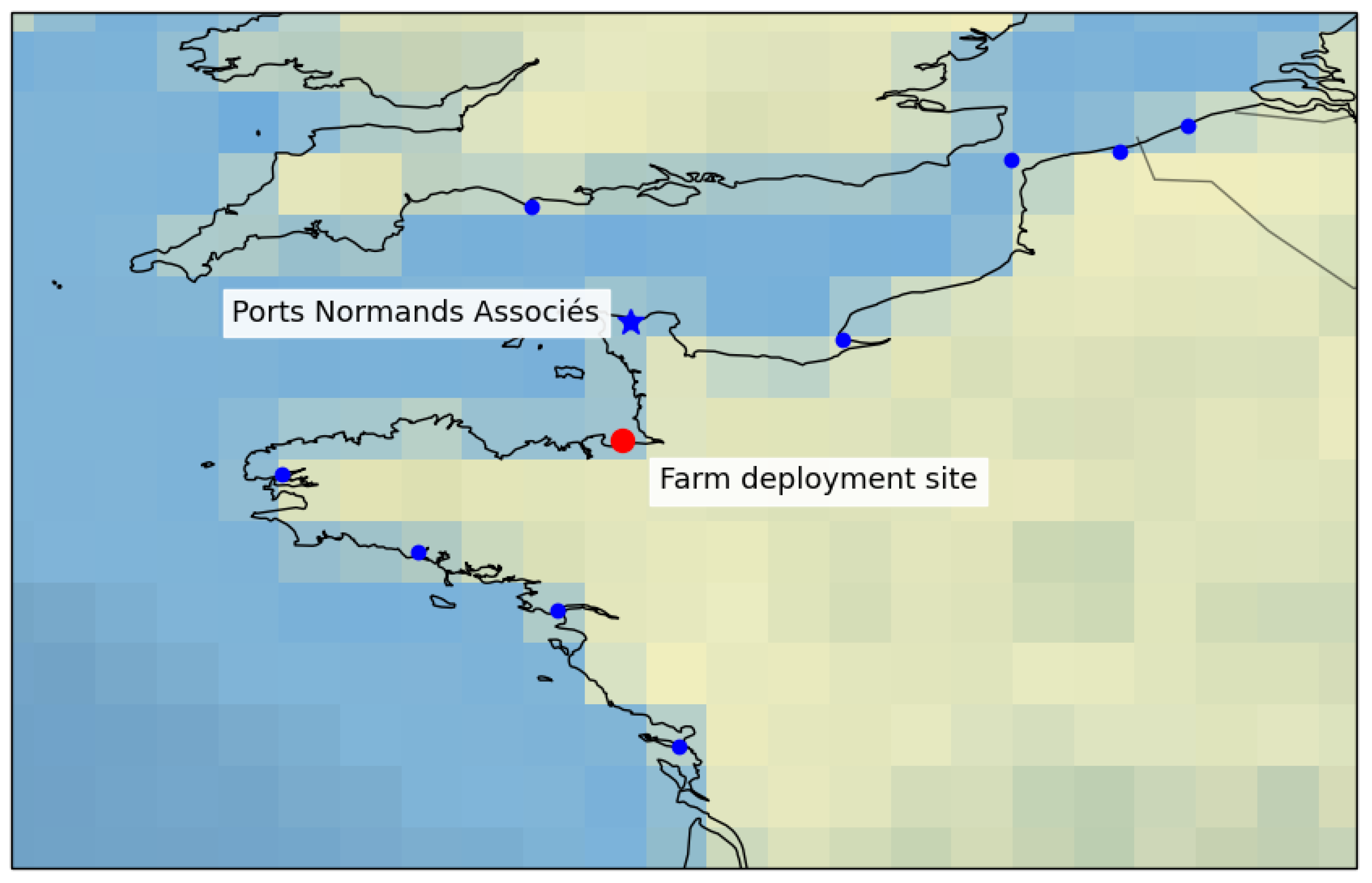
| Selected terminal | Ports Normands Associés-Flamands Sud | ||
| Selected equipment | ROV | ROV, plough | ROV |
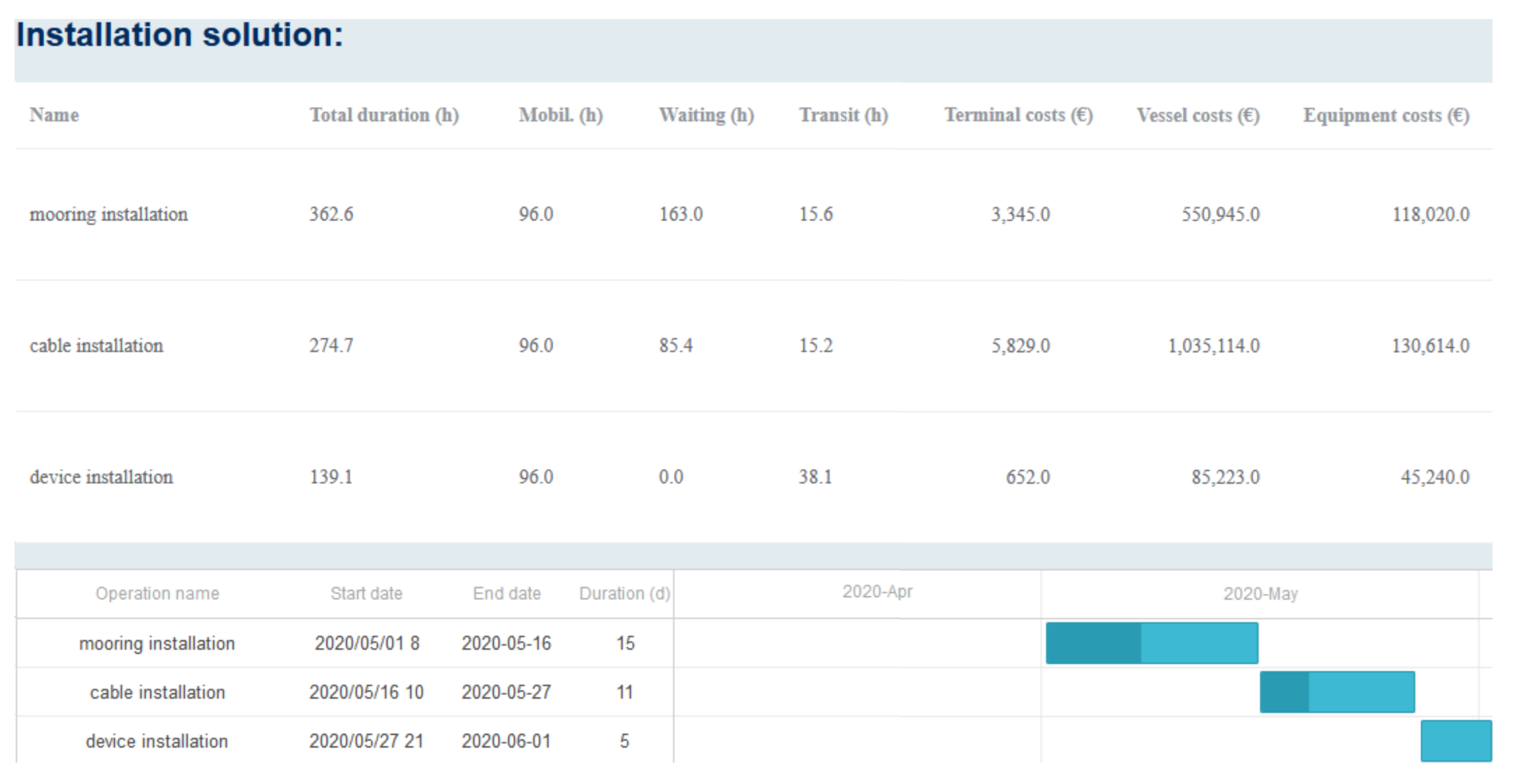
| Mobilisation | 96.0 h | 96.0 h | 96.0 h |
| Total transit | 15.6 h | 15.2 h | 38.1 h |
| Work at port | 67.0 h | 24.0 h | 2.0 h |
| Work on site (at sea) | 21.0 h | 54.0 h | 3.0 h |
| Waiting on weather | 163.0 h | 85.4 h | 0.0 h |
| Total operation duration | 362.6 h | 274.7 h | 139.1 h |
| Vessel fuel consumption | 548.28 ton | 469.13 ton | 87.86 ton |
| Terminal costs | €3345 | €5829 | €652 |
| Vessel costs | €550,945 | €1,035,114 | €85,223 |
| Equipment costs | €118,020 | €130,614 | €45,240 |
| Total operation costs | €672,310 | €1,171,557 | €131,115 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Correia da Fonseca, F.X.; Amaral, L.; Chainho, P. A Decision Support Tool for Long-Term Planning of Marine Operations in Ocean Energy Projects. J. Mar. Sci. Eng. 2021, 9, 810. https://doi.org/10.3390/jmse9080810
Correia da Fonseca FX, Amaral L, Chainho P. A Decision Support Tool for Long-Term Planning of Marine Operations in Ocean Energy Projects. Journal of Marine Science and Engineering. 2021; 9(8):810. https://doi.org/10.3390/jmse9080810
Chicago/Turabian StyleCorreia da Fonseca, Francisco X., Luís Amaral, and Paulo Chainho. 2021. "A Decision Support Tool for Long-Term Planning of Marine Operations in Ocean Energy Projects" Journal of Marine Science and Engineering 9, no. 8: 810. https://doi.org/10.3390/jmse9080810
APA StyleCorreia da Fonseca, F. X., Amaral, L., & Chainho, P. (2021). A Decision Support Tool for Long-Term Planning of Marine Operations in Ocean Energy Projects. Journal of Marine Science and Engineering, 9(8), 810. https://doi.org/10.3390/jmse9080810