
Design and Analysis of a Mooring System for a Wave Energy Converter




Abstract
:1. Introduction
2. Methods
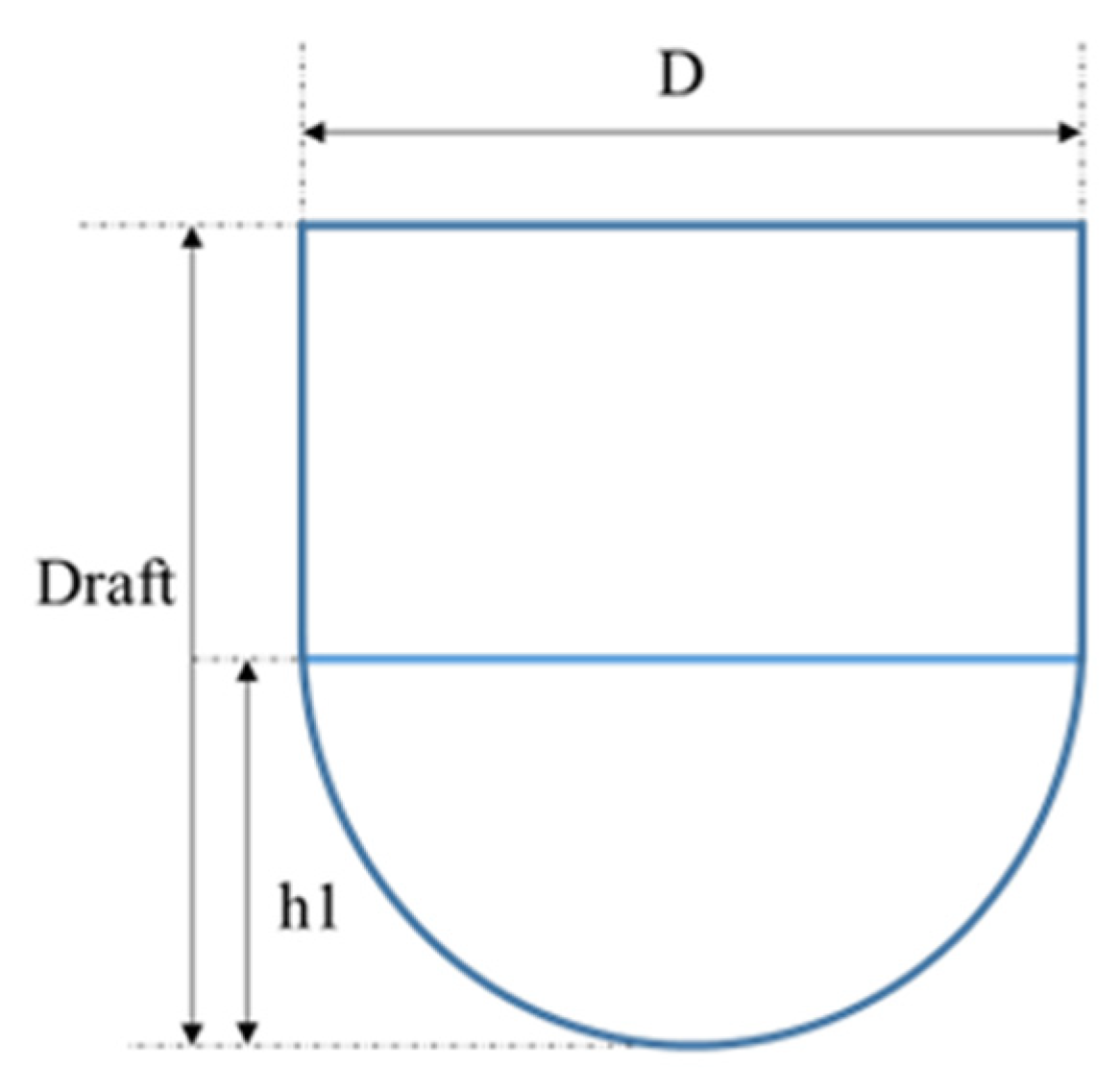
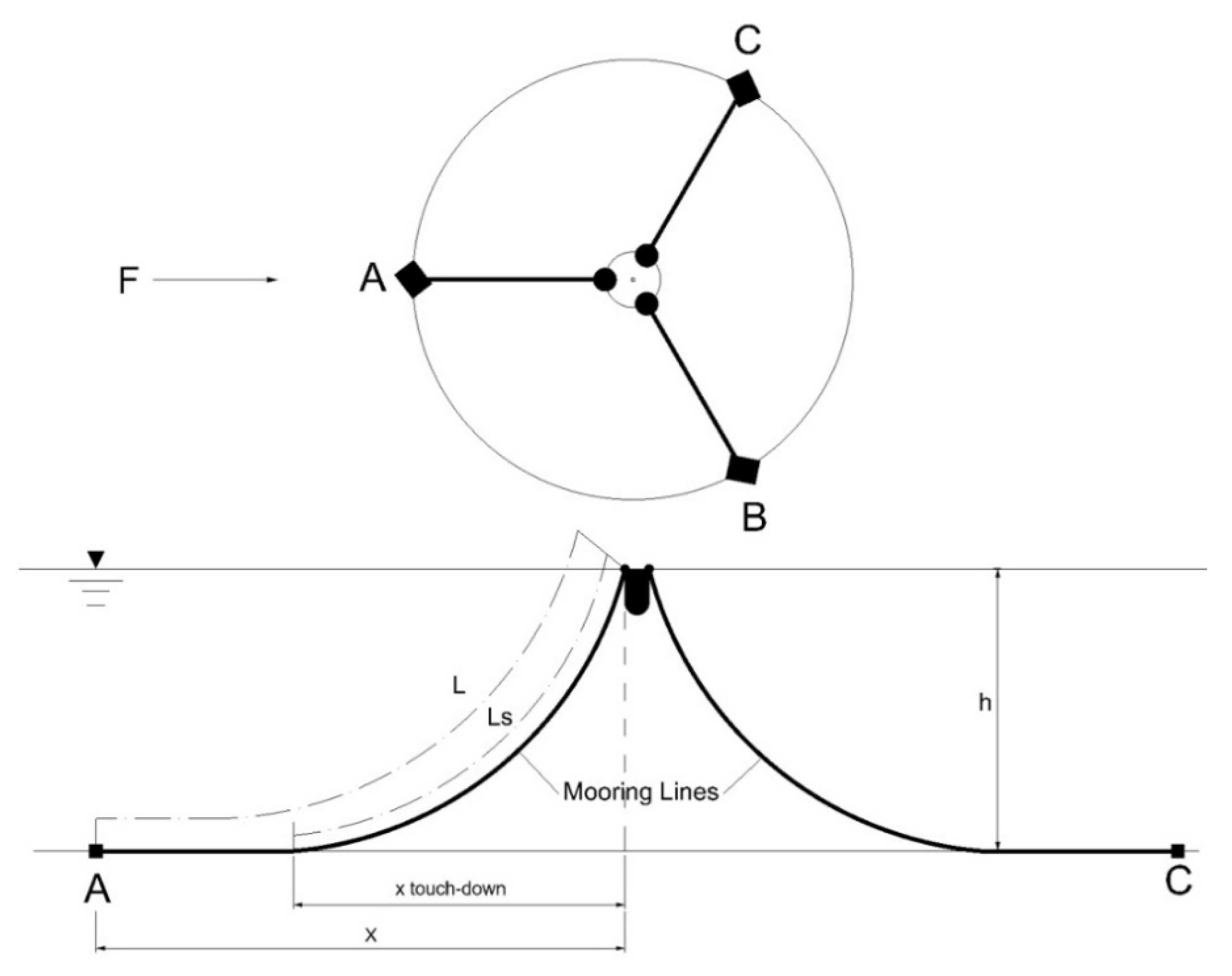
2.1. Description of the Buoy
2.2. Quasi-Static Analysis
- Mean loads;
- Low frequencies loads;
- Wave frequencies loads.
- F0 is the force amplitude;
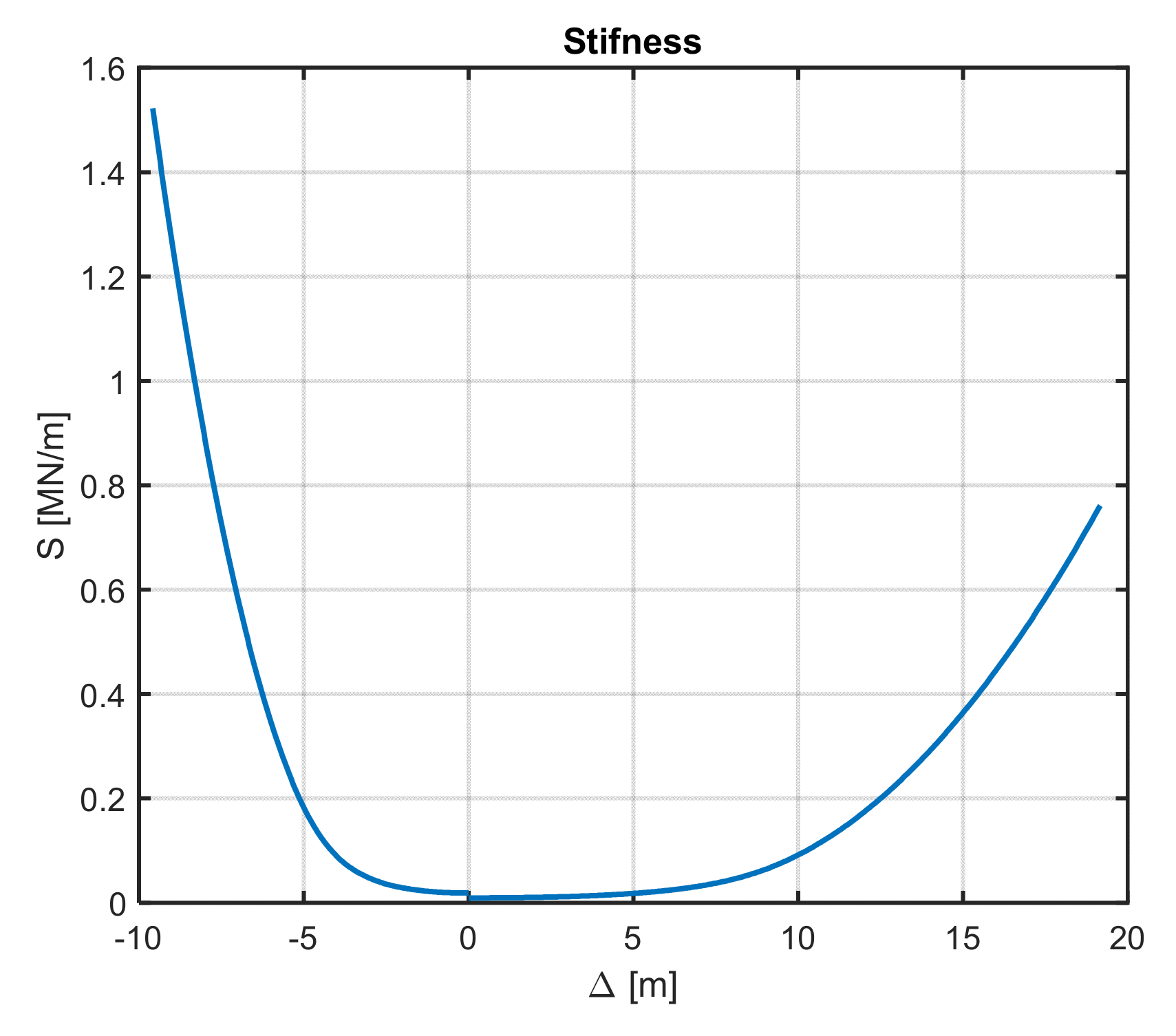
- S is the mooring stiffness;
- M is the mass of the floating body and Ma the relative added mass;
- is the angular frequency;
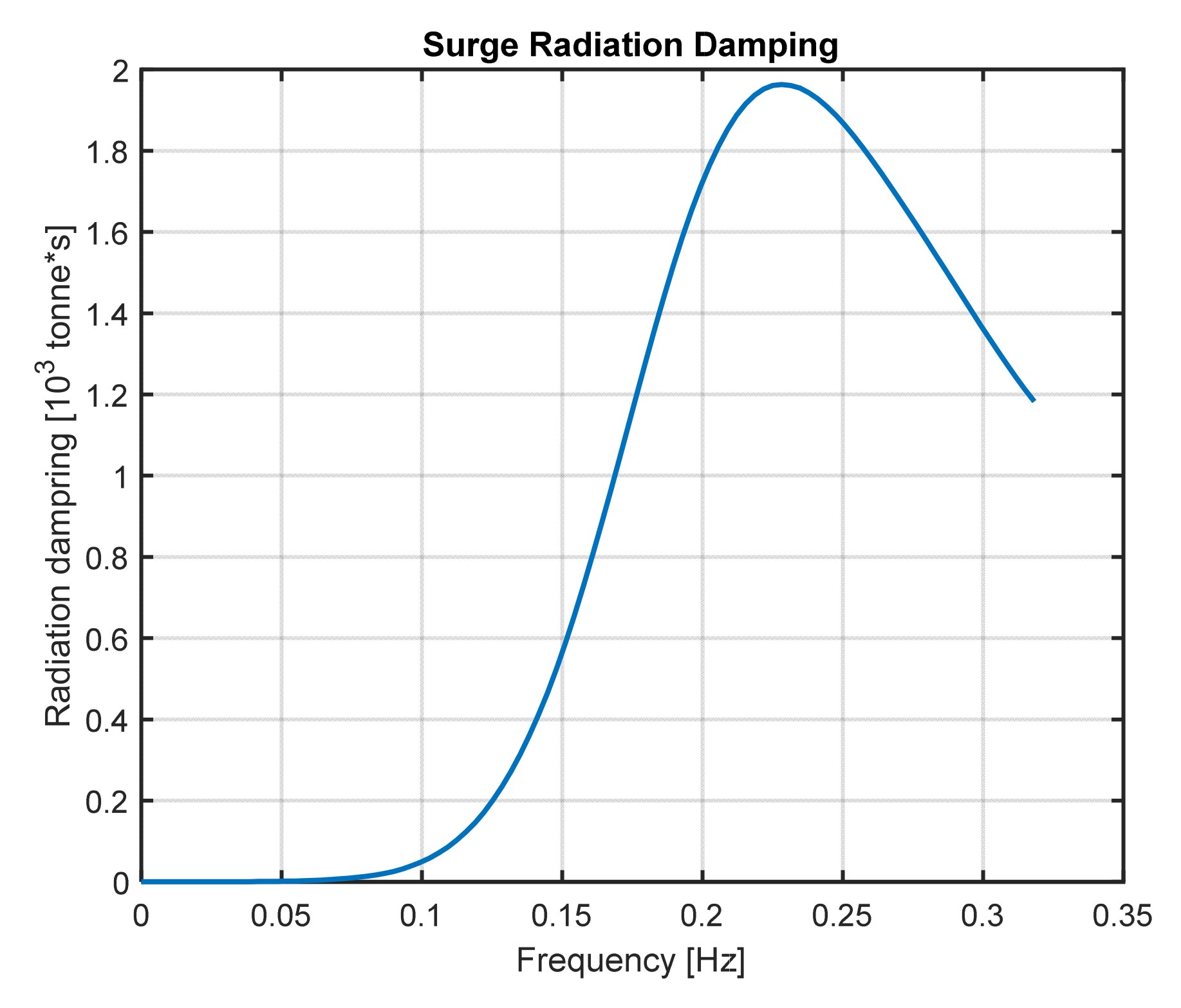
- b is the radiation damping of the system.
2.3. Dynamic Analysis
- , which is the arithmetic mean;
- ;
- γ is the Euler’s constant.
3. Calculations of Environmental Loads
3.1. Environmental Conditions
3.2. Environmental Loads
3.2.1. Current Load
- is the kinematic viscosity of the fluid ;
- D is the diameter of the exposed body’s section considered;
- U is the mean speed of the fluid.
3.2.2. Mean Drift Force
3.2.3. Regular Waves
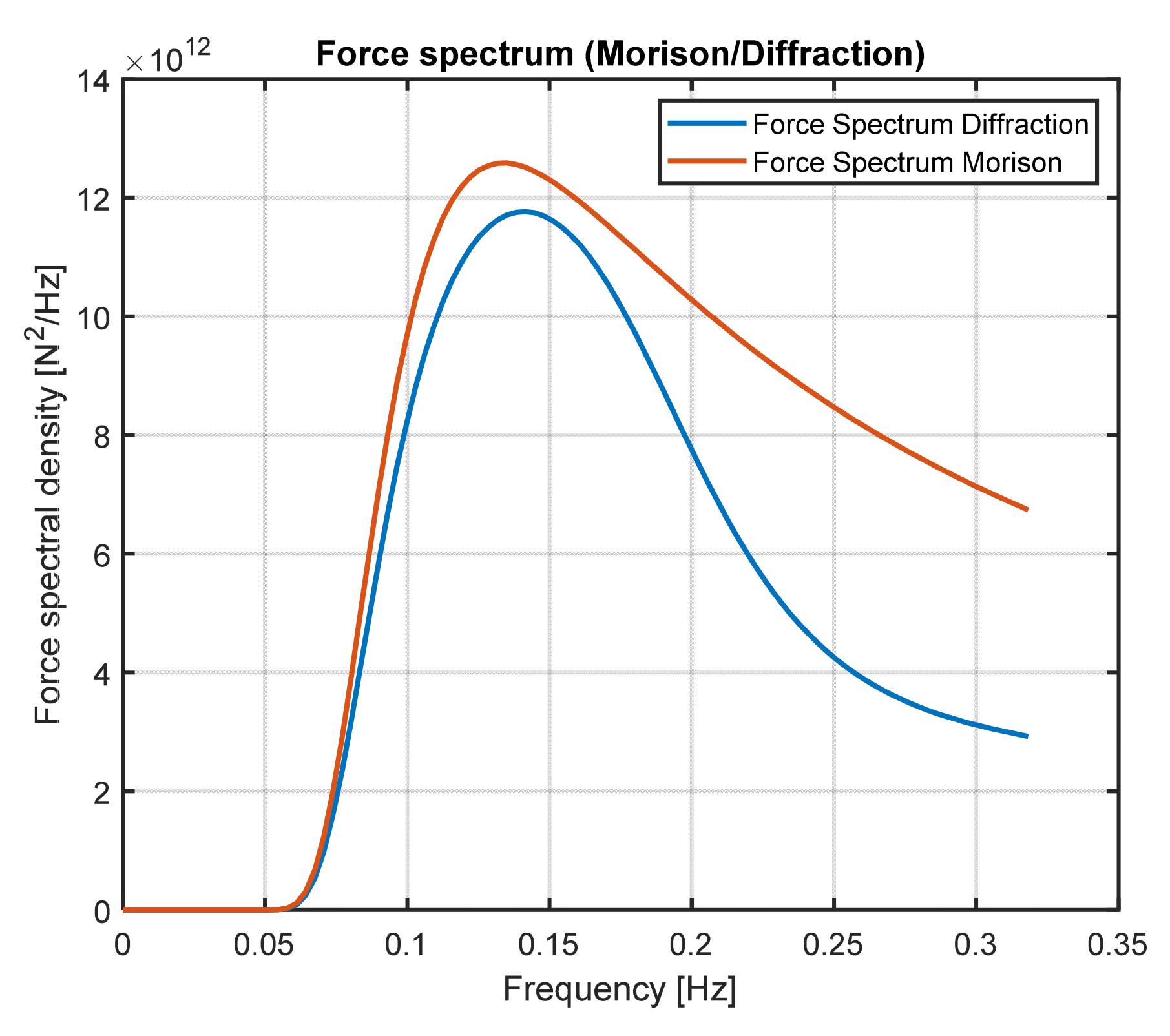
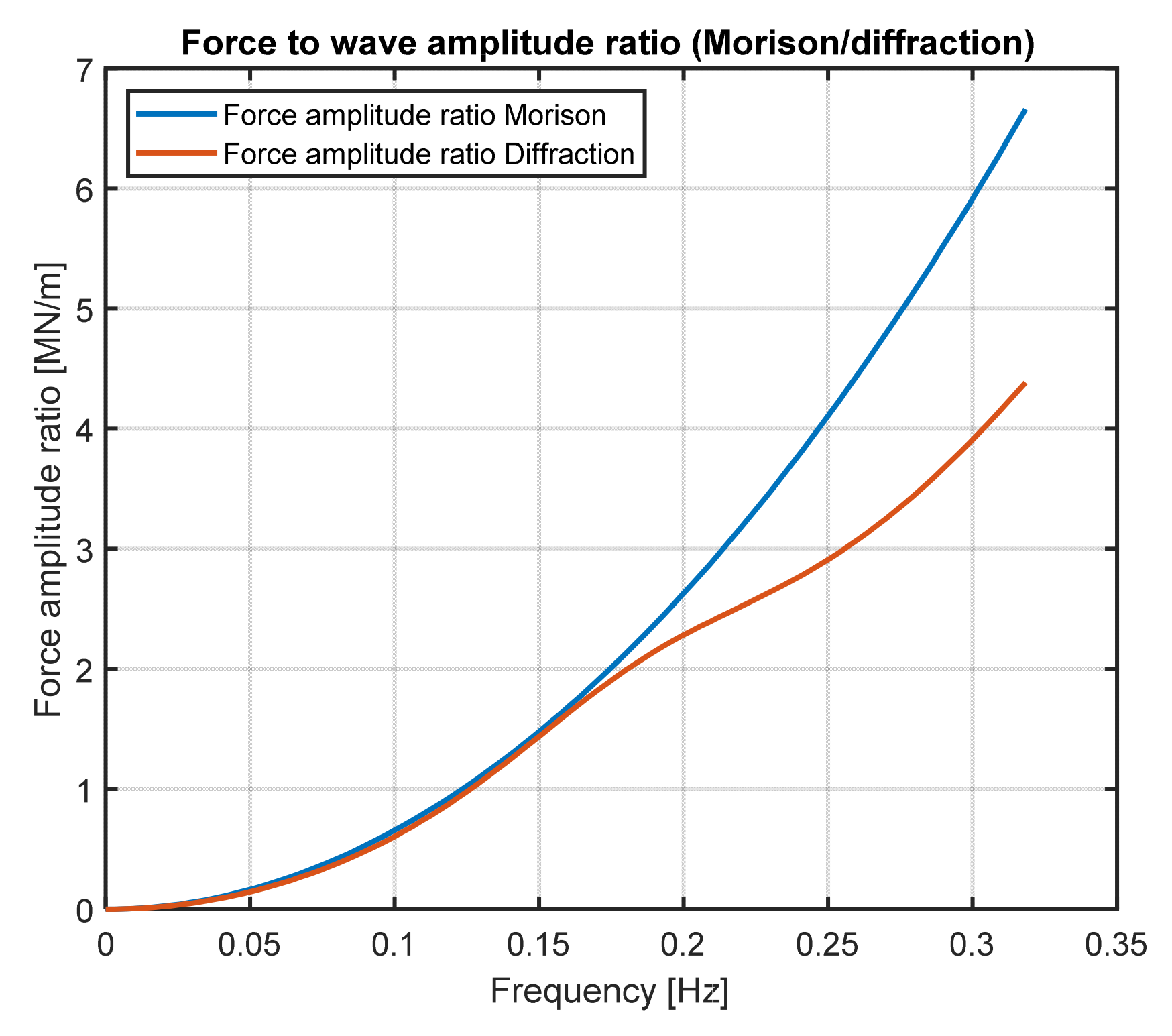
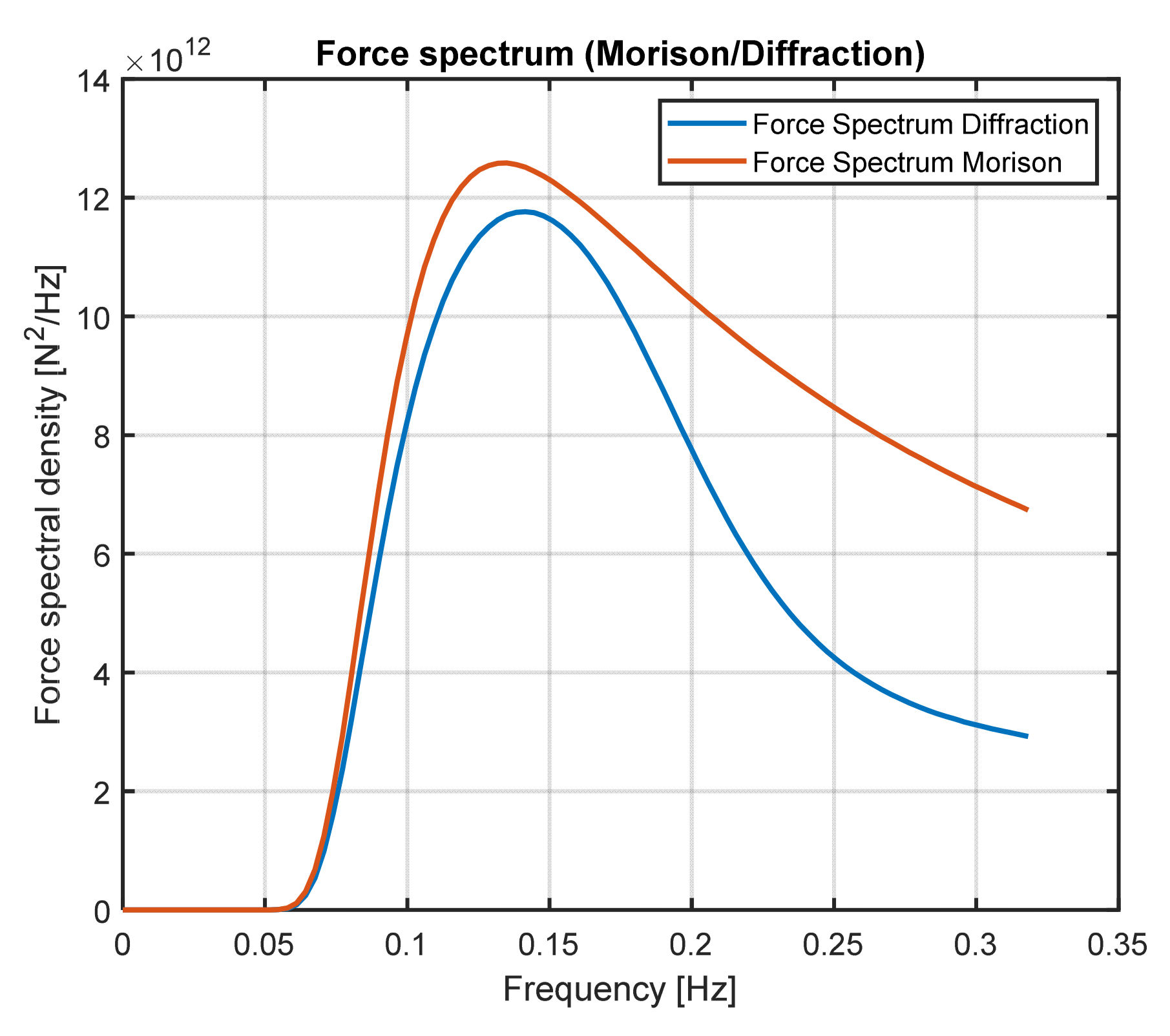
3.2.4. Irregular Waves Morison Approach
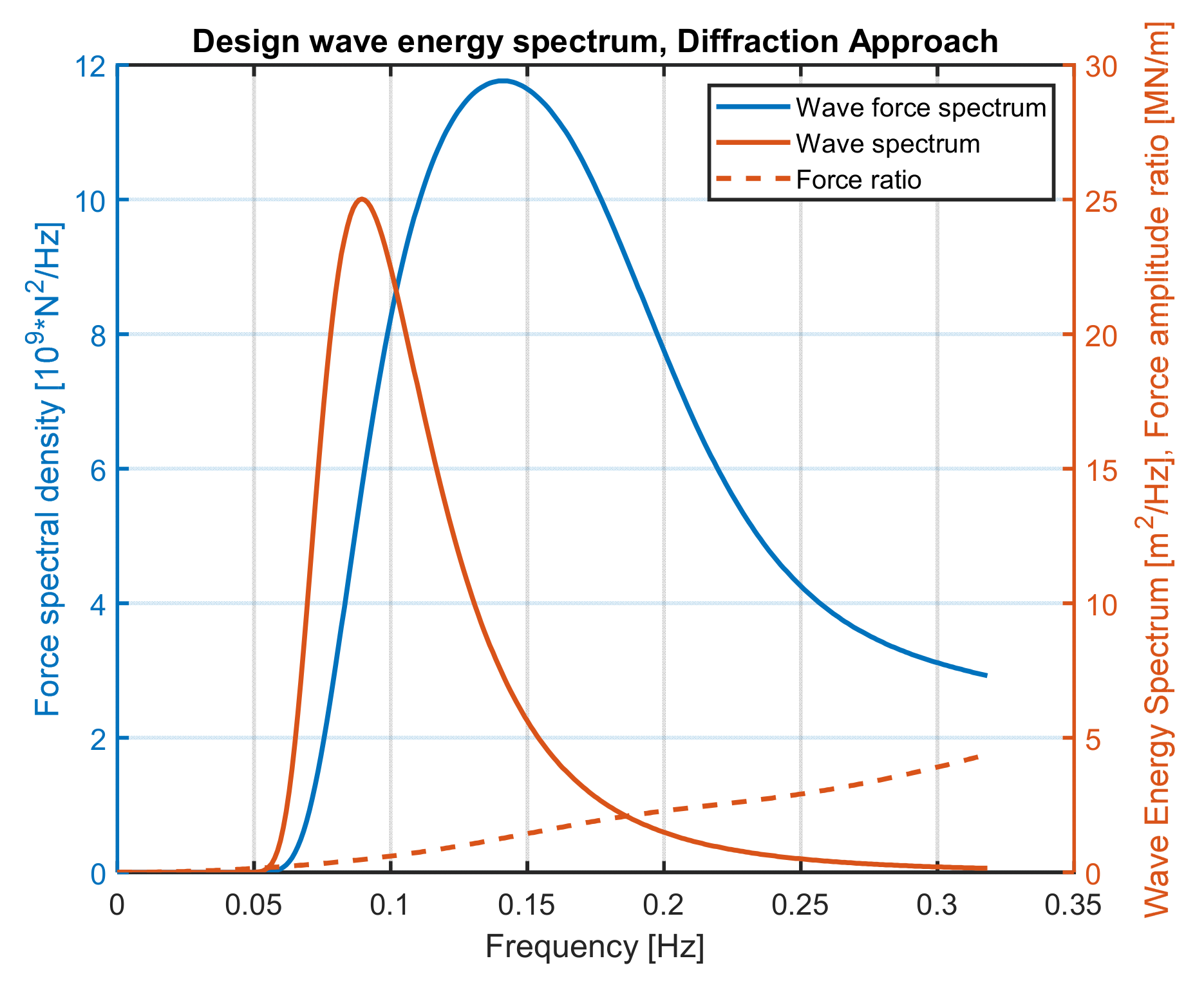
3.2.5. Irregular Waves Diffraction Approach
4. Results and Discussions
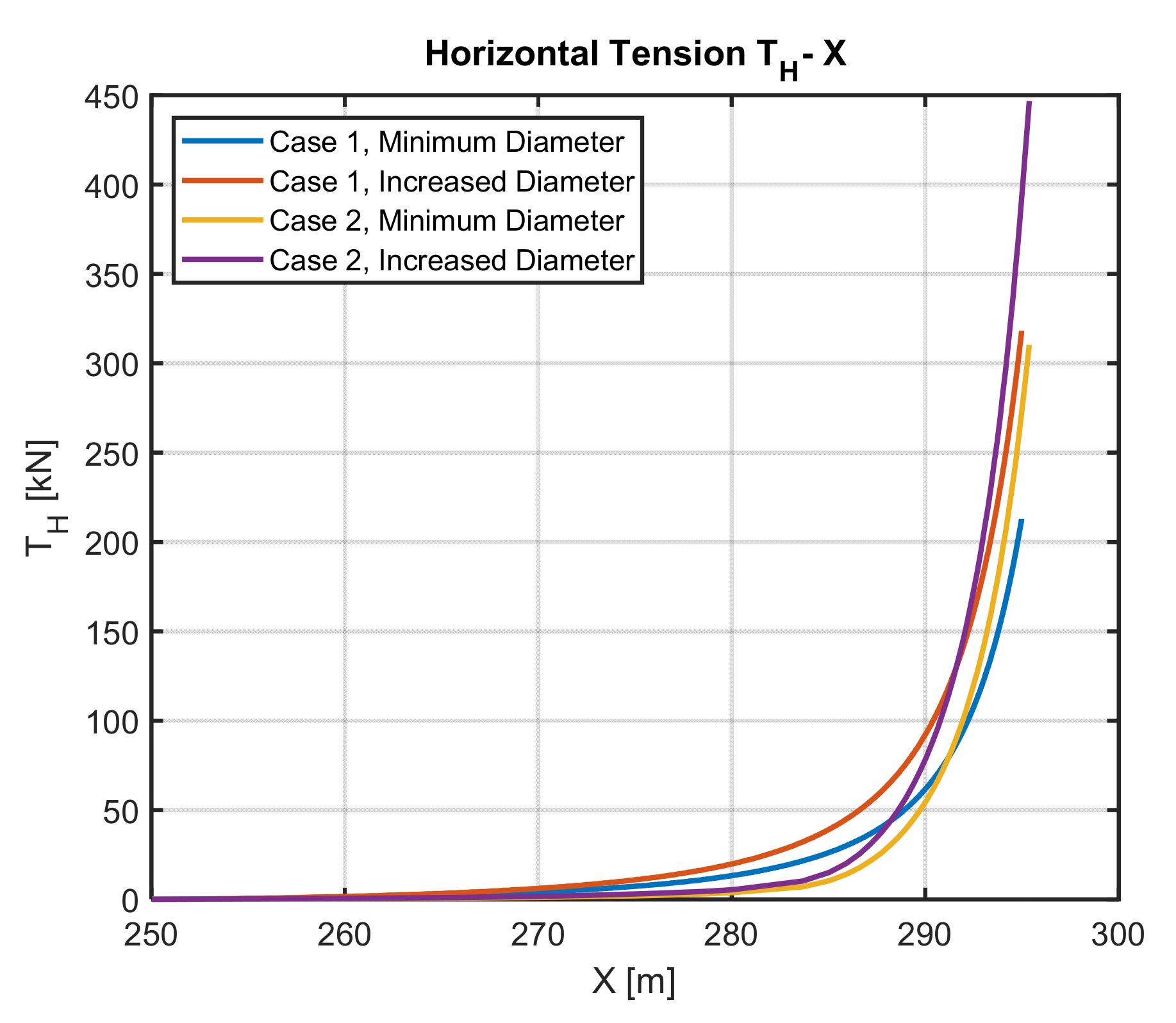
4.1. Quasi-Static Design
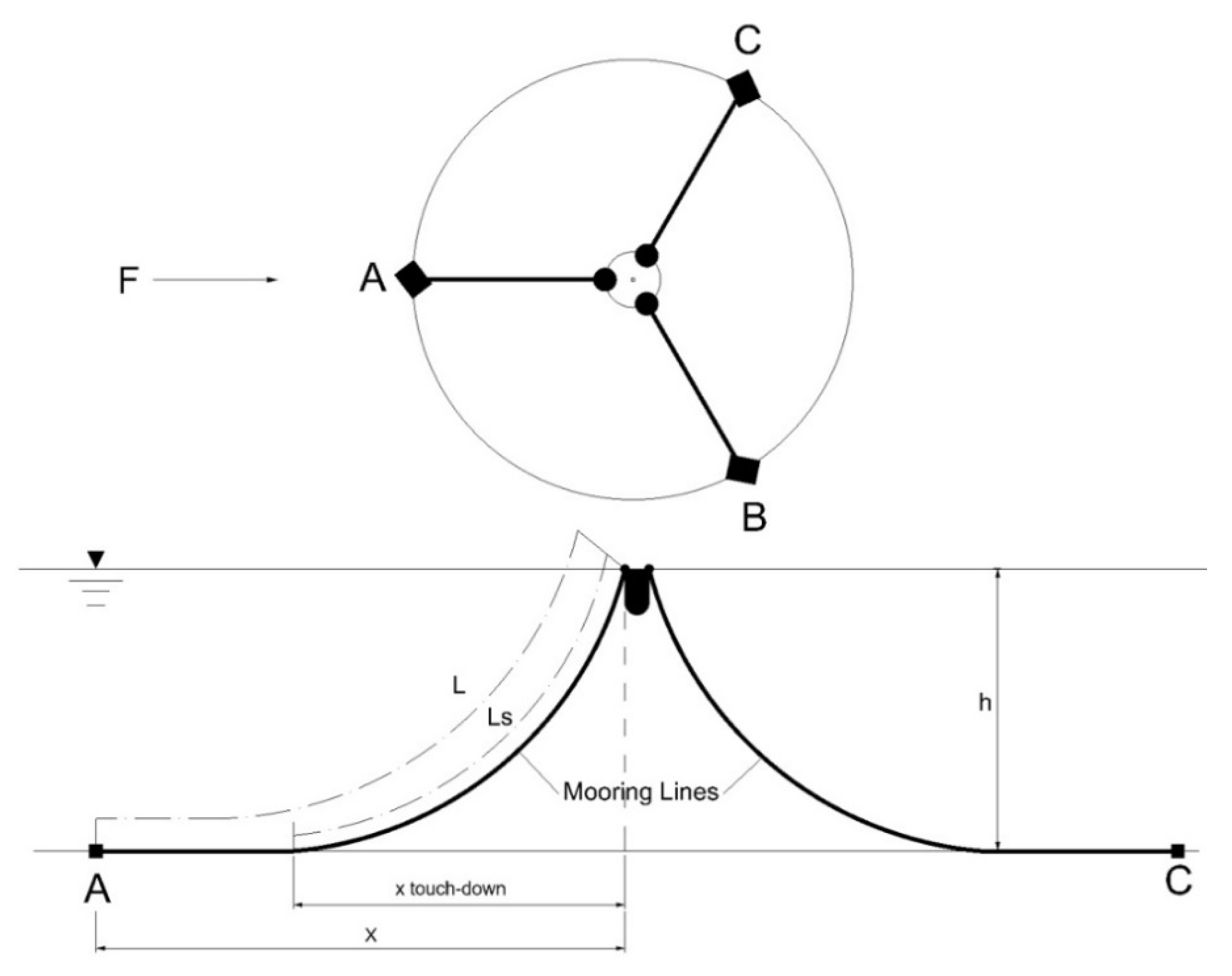
- The length of the lifted cable must be lower than the length of the cable (LLift-Max < L).
- For Case 2, considering that fibre rope is more sensitive to abrasion than the chain, the system has been designed in order to have only the chain laying on the seabed in the initial position [24].
- The calculated maximum tension (TMax), multiplied by a safety factor (γ) must result in less than 0.95 times the minimum breaking strength (TBR) of the cable, as shown in the following Equation:
4.1.1. Initial Position (Zero Offset)
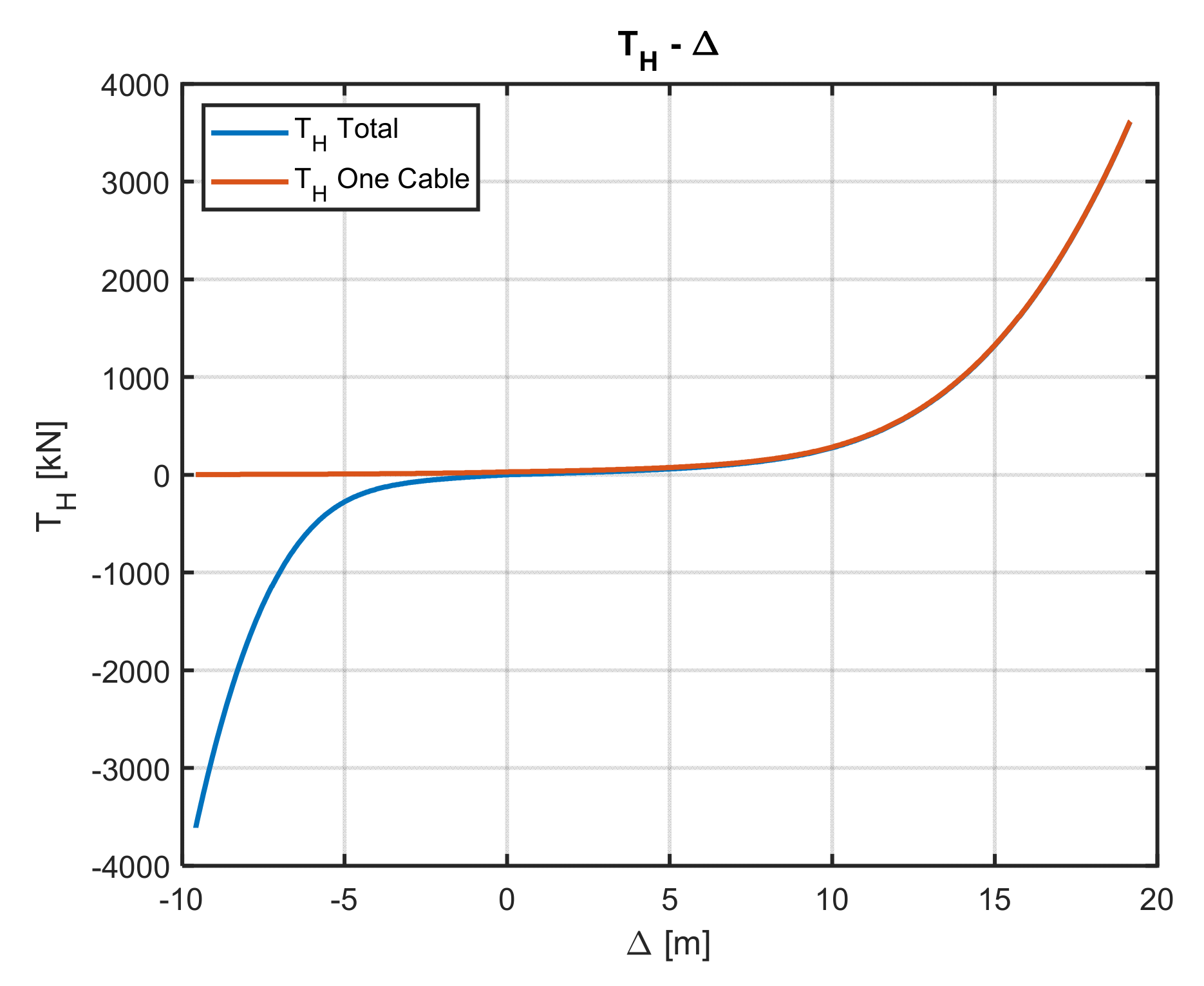
4.1.2. Mean Excursion
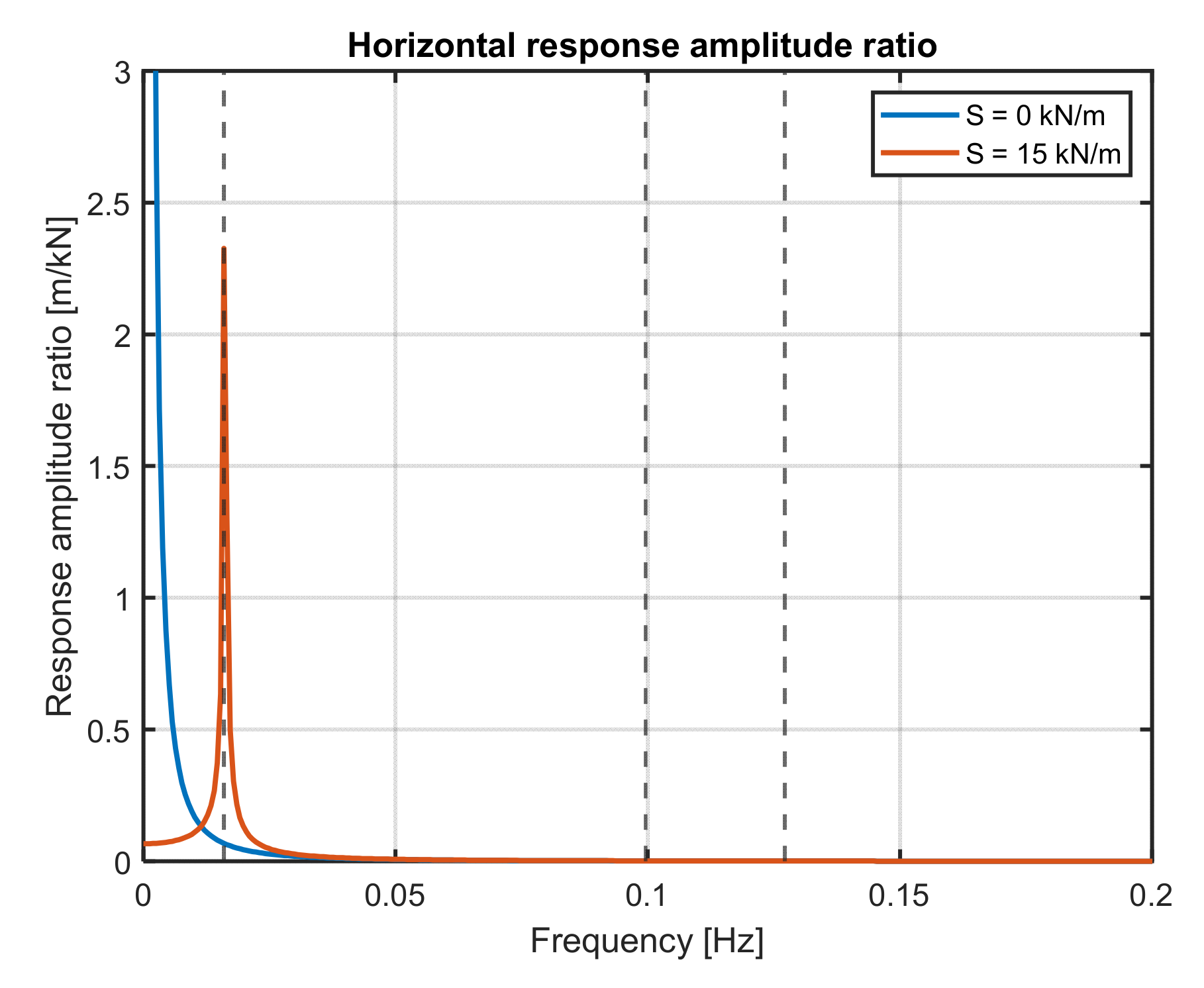
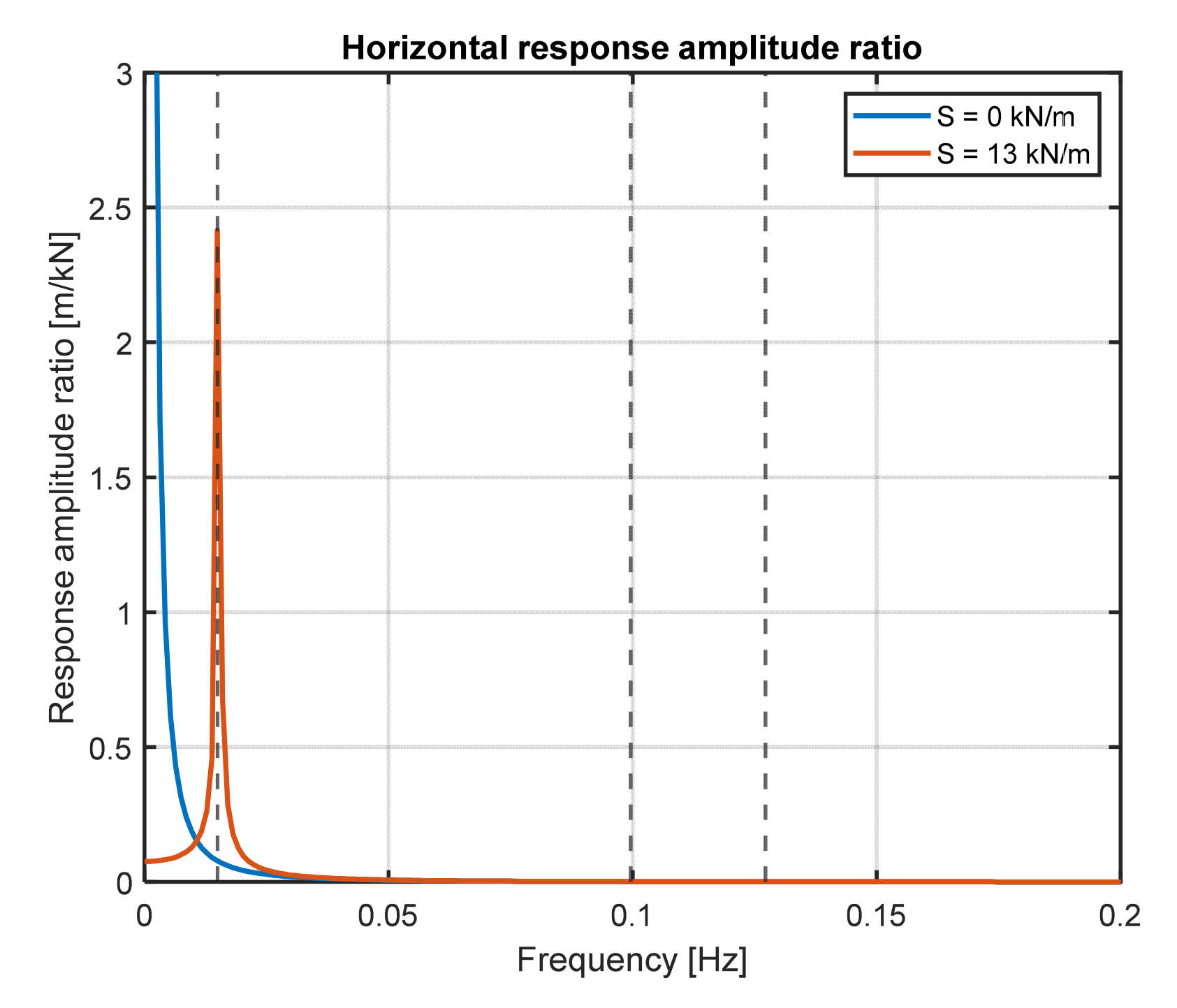
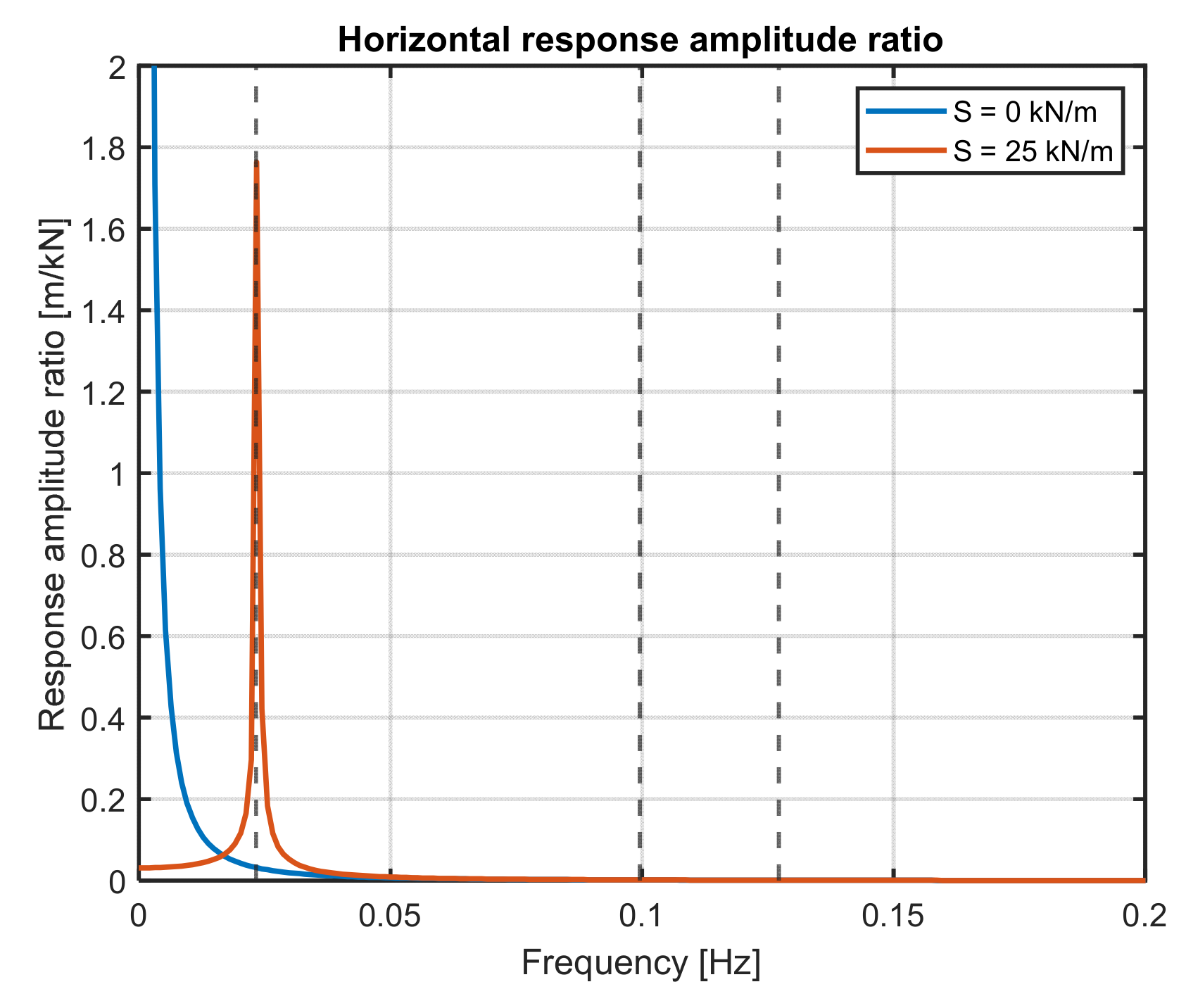
4.1.3. Response Motion to Wave Loads
4.1.4. Quasi-Static Analysis Results
4.2. Dynamic Analysis
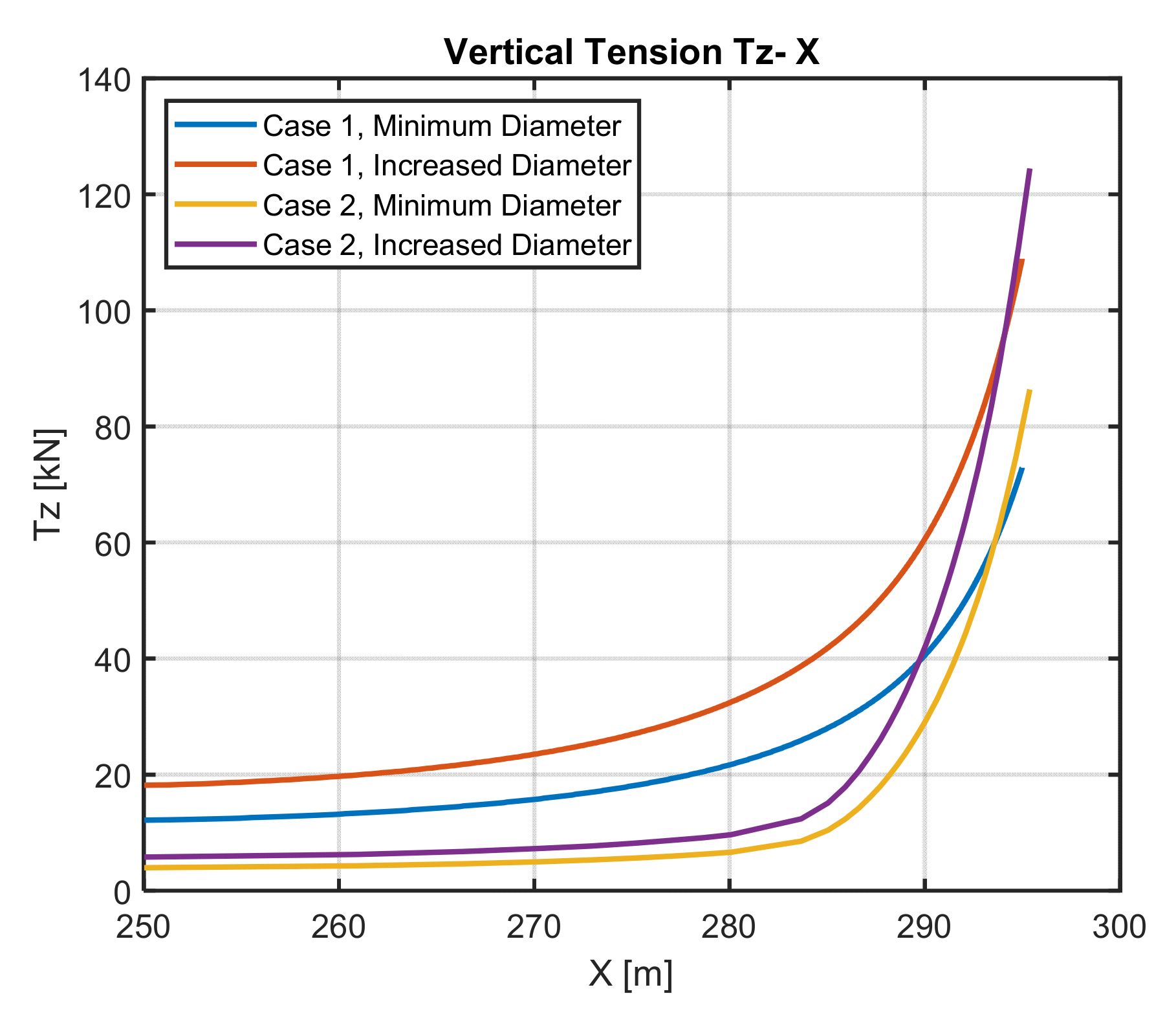
- Case 1, pre-tension = 30 kN, minimum diameter: D = 36 mm;
- Case 2, pre-tension = 10 kN; minimum diameter: D = 26 mm, 100 mm, 45 mm;
- Case 2, pre-tension = 30 kN; minimum diameter: D = 26 mm, 100 mm, 45 mm.
4.2.1. Validation
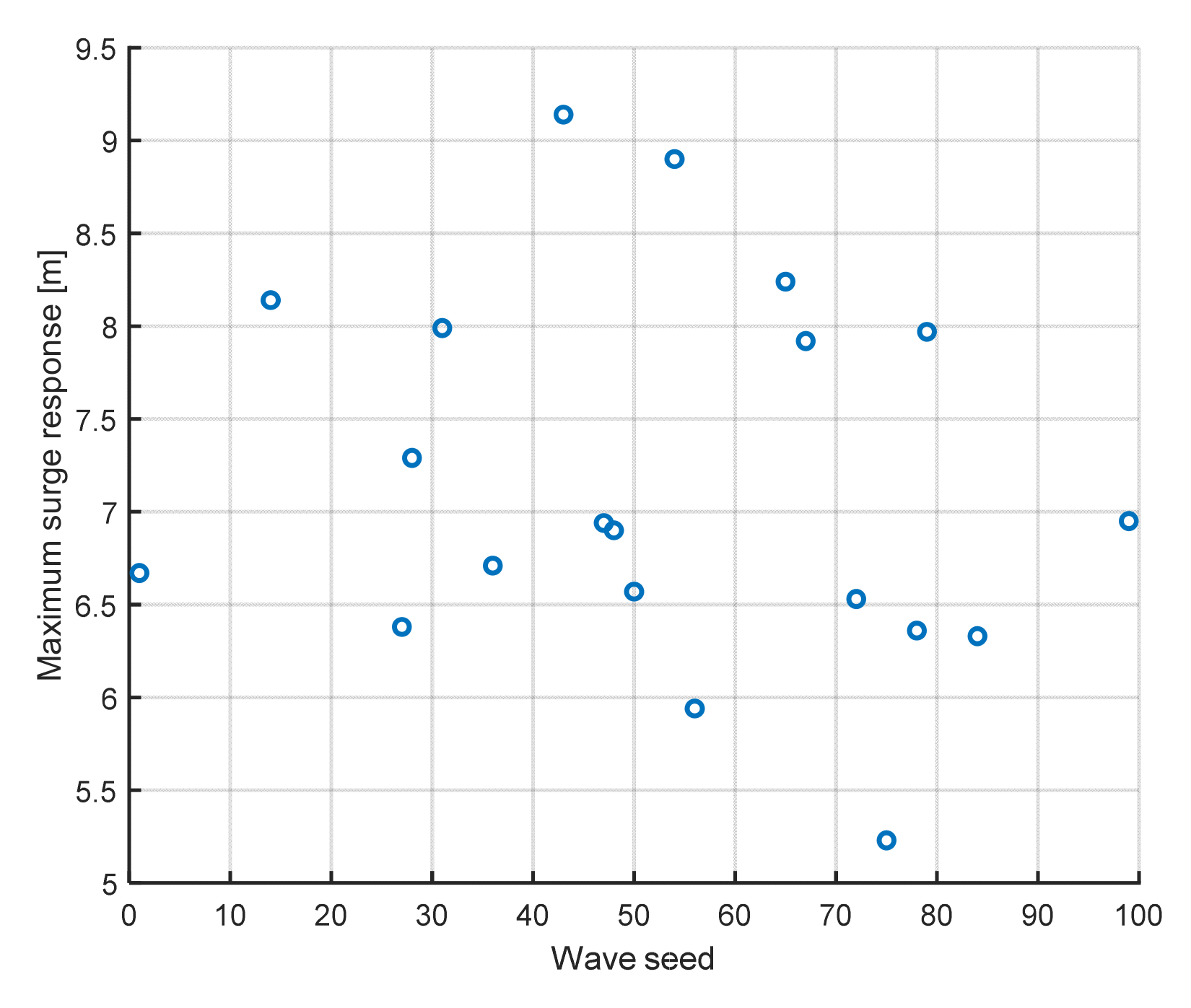
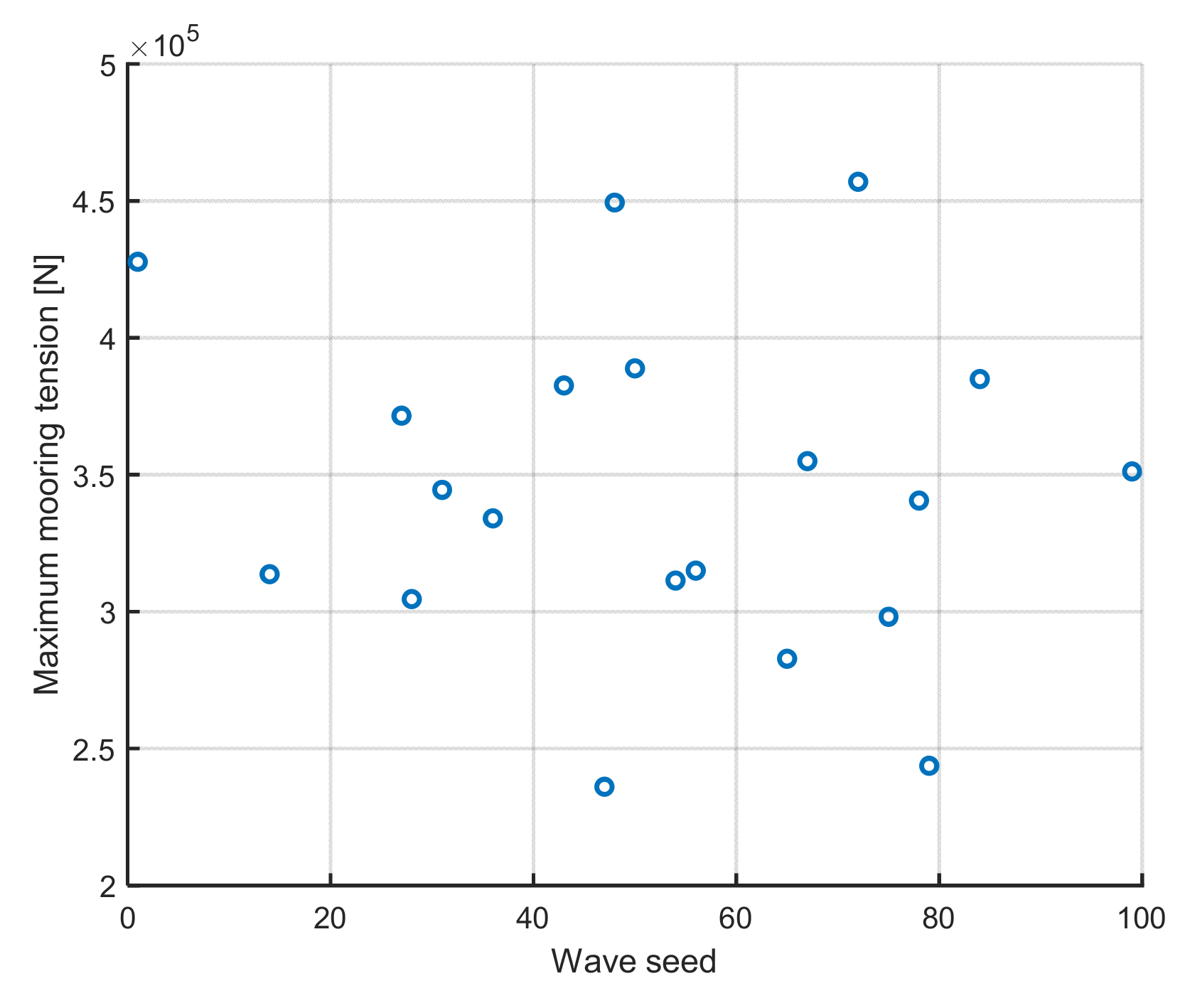
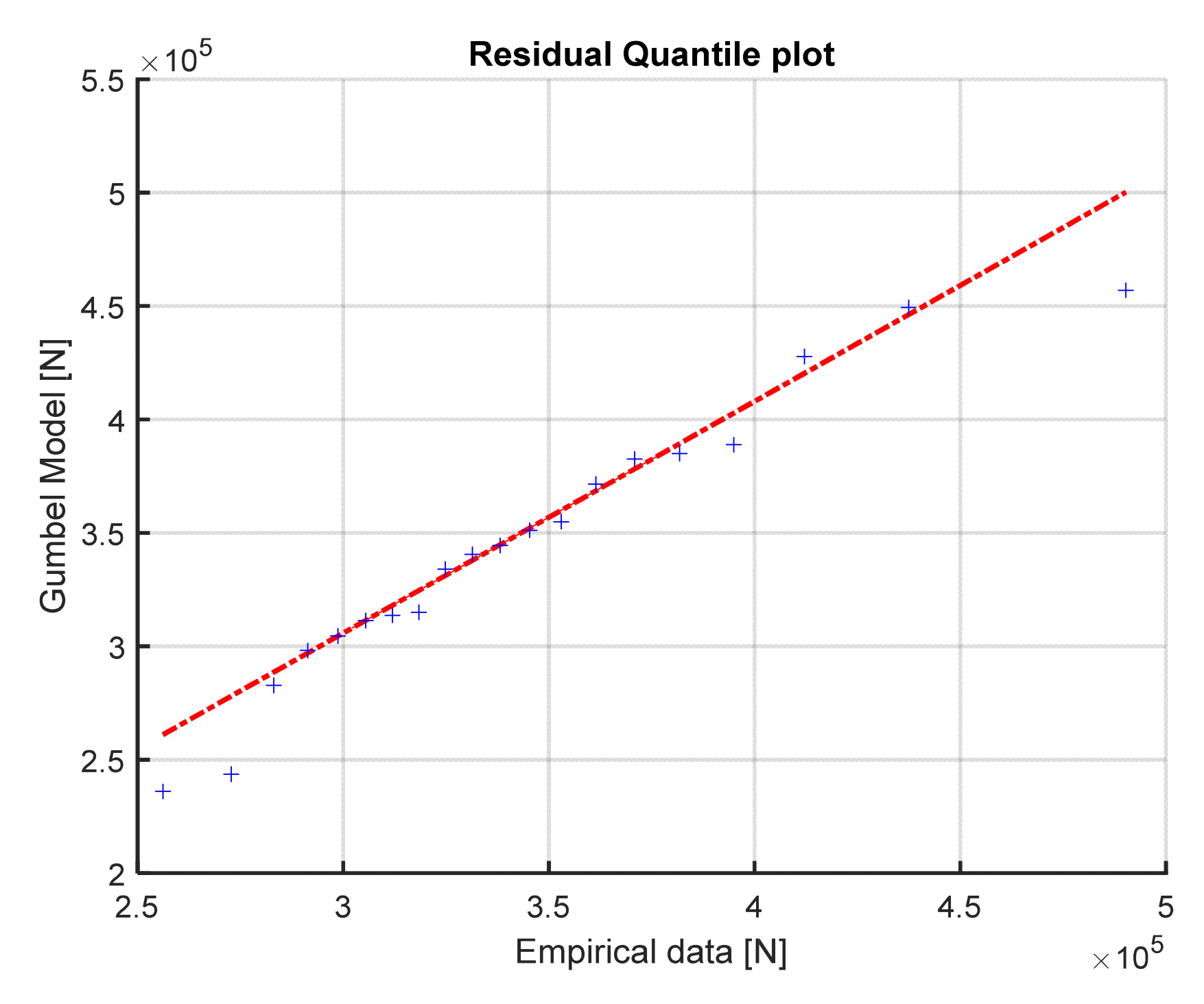
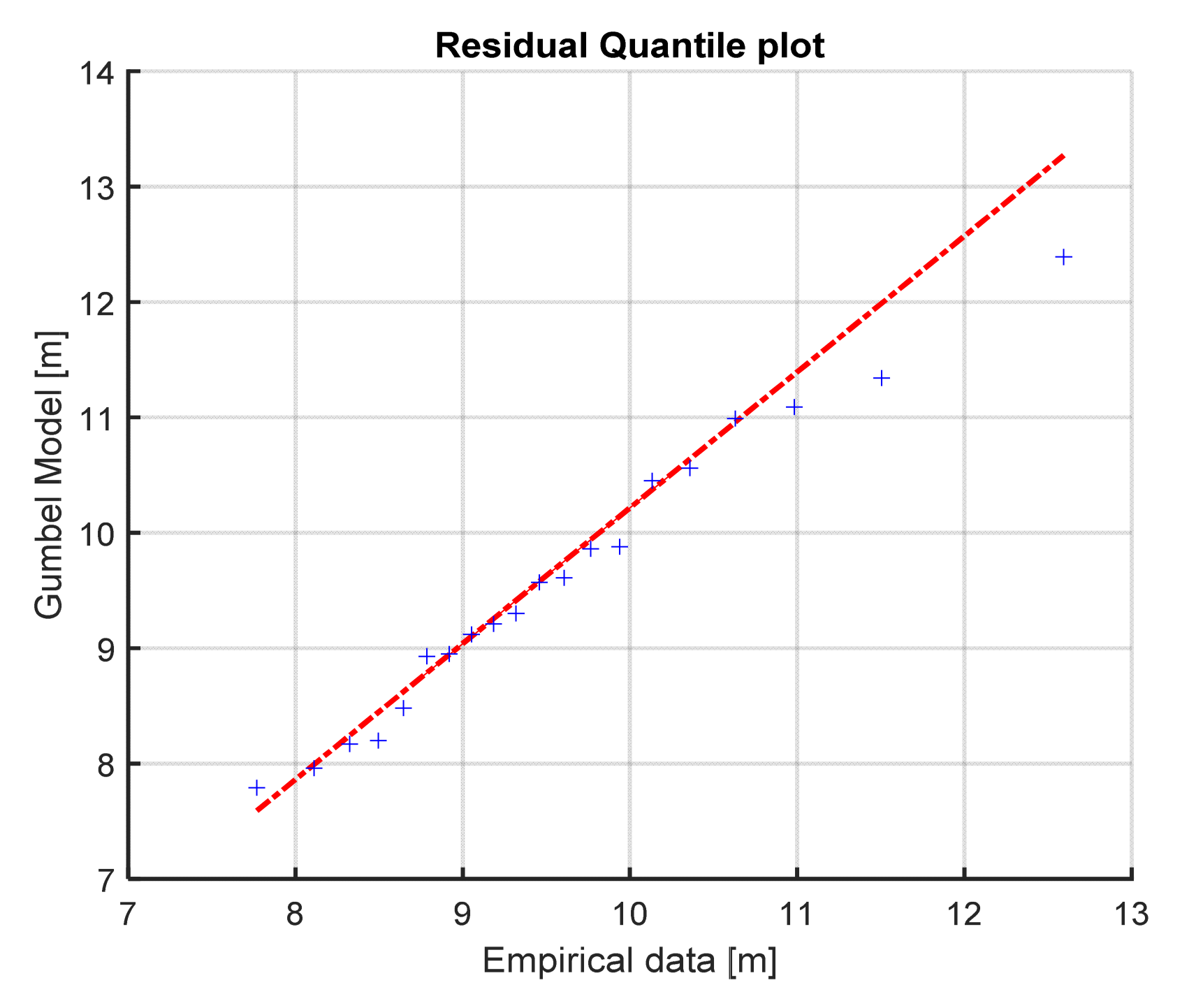
4.2.2. Extreme Values from Dynamic Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cruz, J. Ocean Wave Energy: Current Status and Future Perspectives; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Czech, B.; Bauer, P. Wave energy converter concepts: Design challenges and classification. IEEE Ind. Electron. Mag. 2012, 6, 4–16. [Google Scholar] [CrossRef]
- Guedes Soares, C.; Bhattacharjee, J.; Tello, M.; Pietra, L. Review and Classification of Wave Energy Converters. In Maritime Engineering and Technology; Guedes Soares, C., Garbatov, Y., Sutulo, S., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2012; pp. 585–594. [Google Scholar]
- Ma, K.T.; Luo, Y.; Kwan, T.; Wu, Y. Mooring System Engineering for Offshore Structures; Gulf Professional Publishing: Houston, TX, USA, 2019. [Google Scholar]
- Johanning, L.; Smith, G.H.; Wolfram, J. Mooring design approach for wave energy converters. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2006, 220, 159–174. [Google Scholar] [CrossRef]
- Cribbs, A.R.; Kärrsten, G.R.; Shelton, J.T.; Nicoll, R.S.; Stewart, W.P. Mooring system considerations for renewable energy standards. In Proceedings of the Offshore Technology Conference, OTC, Houston, TX, USA, 1–4 May 2017. [Google Scholar]
- Martinelli, L.; Ruol, P.; Cortellazzo, G. On mooring design of wave energy converters: The Seabreath application. In Proceedings of the Coastal Engineering Proceedings, Santander, Spain, 15 October 2012. [Google Scholar]
- Thomsen, J.B.; Kofoed, J.P.; Ferri, F.; Eskilsson, C.; Bergdahl, L.; Delaney, M.; Thomas, S.; Nielsen, K.; Rasmussen, K.D.; Friis-Madsen, E. On mooring solutions for large wave energy converters. In Proceedings of the Twelfth Eur Wave Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Thomsen, J.B.; Delaney, M. Preliminary Analysis and Selection of Mooring Solution Candidates; DCE Technical Reports, No. 241; Department of Civil Engineering, Aalborg University: Aalborg, Danmark, 2018. [Google Scholar]
- Weller, S.D.; Hardwick, J.; Gomez, S.; Heath, J.; Jensen, R.; Mclean, N.; Johanning, L. Verification of a rapid mooring and foundation design tool. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 232, 116–129. [Google Scholar] [CrossRef] [Green Version]
- IEC (International Electrotechnical Commission). Marine Energy-Wave, Tidal and other Water Current Converters-Part 101: Assessment of Mooring System for Marine Energy Converters (MECs); IEC. TS 62600–10. Edition 1.0.2015-06; International Electrotechnical Commission: Geneva, Switzerland, 2015. [Google Scholar]
- Xu, S.; Wang, S.; Guedes Soares, C. Review of mooring design for floating wave energy converters. Renew. Sustain. Energy Rev. 2019, 111, 595–621. [Google Scholar] [CrossRef]
- Doyle, S.; Aggidis, G.A. Development of multi-oscillating water columns as wave energy converters. Renew. Sustain. Energy Rev. 2019, 1, 75–86. [Google Scholar] [CrossRef] [Green Version]
- Giannini, G.; Rosa-Santos, P.; Ramos, V.; Taveira-Pinto, F. On the development of an offshore version of the CECO wave energy converter. Energies 2020, 13, 1036. [Google Scholar] [CrossRef] [Green Version]
- Bergdahl, L.; Kofoed, J.P. Simplified Design Procedures for Moorings of Wave-Energy Converters: Deliverable, 2.2; DCE Technical Reports, No. 172; Department of Civil Engineering, Aalborg University: Aalborg, Denmark, 2015. [Google Scholar]
- Chakrabarti, S.K. Handbook of Offshore Engineering; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Xu, S.; Ji, C.Y.; Guedes Soares, C. Estimation of short-term extreme responses of a semi-submersible moored by two hybrid mooring systems. Ocean Eng. 2019, 190, 106388. [Google Scholar] [CrossRef]
- Xu, S.; Wang, S.; Guedes Soares, C. Experimental investigation on hybrid mooring systems for wave energy converters. Renew. Energy 2020, 158, 130–153. [Google Scholar] [CrossRef]
- Yang, S.H.; Ringsberg, J.W.; Johnson, E.; Hu, Z. Experimental and numerical investigation of a taut-moored wave energy converter: A validation of simulated mooring line forces. Ships Offshore Struct. 2021, 15, S55–S69. [Google Scholar] [CrossRef]
- Yang, S.H.; Ringsberg, J.W.; Johnson, E.; Hu, Z.; Palm, J. A comparison of coupled and de-coupled simulation procedures for the fatigue analysis of wave energy converter mooring lines. Ocean Eng. 2016, 117, 332–345. [Google Scholar] [CrossRef] [Green Version]
- Amaechi, C.V.; Wang, F.; Hou, X.; Ye, J. Strength of submarine hoses in Chinese-lantern configuration from hydrodynamic loads on CALM buoy. Ocean Eng. 2019, 1, 429–442. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Amaechi, C.V.; Hou, X.; Ye, J. Sensitivity Studies on Offshore Submarine Hoses on CALM Buoy with Comparisons for Chinese-Lantern and Lazy-S Configuration: OMAE2019-96755. In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering ASME OMAE, Glasgow, UK, 10 June 2019. [Google Scholar]
- Weller, S.D.; Johanning, L.; Davies, P.; Banfield, S.J. Synthetic mooring ropes for marine renewable energy applications. Renew. Energy 2015, 83, 1268–1278. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Xu, S.; Xiang, G.; Guedes Soares, C. An Overview of Synthetic Mooring Cables in Marine Applications. In Advances in Renewable Energies Offshore; Guedes Soares, C., Ed.; Taylor & Francis Group: London, UK, 2018; pp. 854–863. [Google Scholar]
- Xu, S.; Wang, S.; Hallak, T.S.; Rezanejad, K.; Hinostroza, C.; Guedes Soares, C.; Rodriguez, P.; Rosa-Santos Taveira-Pinto, F. Experimental study of two mooring systems for wave energy converters. In Progress in Maritime Engineering and Technology; Guedes Soares, C., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2018; pp. 667–676. [Google Scholar]
- Xiang, G.; Xu, S.; Wang, S.; Guedes Soares, C. Comparative study on two different mooring systems for a buoy. In Advances in Renewable Energies Offshore; Guedes Soares, C., Ed.; Taylor & Francis Group: London, UK, 2018; pp. 829–835. [Google Scholar]
- Huang, W.; Liu, H.; Lian, Y.; Li, L. Modeling nonlinear time-dependent behaviors of synthetic fiber ropes under cyclic loading. Ocean Eng. 2015, 109, 207–216. [Google Scholar] [CrossRef]
- Lian, Y.; Liu, H.; Li, L.; Zhang, Y. An experimental investigation on the bedding-in behavior of synthetic fiber ropes. Ocean Eng. 2018, 160, 368–381. [Google Scholar] [CrossRef]
- Wang, S.; Xu, S.; Guedes Soares, C.; Zhang, Y.; Liu, H.; Li, L. Experimental study of nonlinear behavior of a nylon mooring rope at different scales. In Developments in Renewable Energies Offshore; Guedes Soares, C., Ed.; Taylor and Francis: London, UK, 2020; pp. 690–697. [Google Scholar]
- Xu, S.; Wang, S.; Liu, H.; Zhang, Y.; Li, L.; Guedes Soares, C. Experimental evaluation of the dynamic stiffness of synthetic fibre mooring ropes. Appl. Ocean Res. 2021, 112, 102709. [Google Scholar] [CrossRef]
- Xu, S.; Wang, S.; Guedes Soares, C. Experimental investigation on the influence of hybrid mooring system configuration and mooring material on the hydrodynamic performance of a point absorber. Ocean Eng. 2021, in press. [Google Scholar] [CrossRef]
- Thomsen, J.B.; Ferri, F.; Kofoed, J.P. Experimental testing of moorings for large floating wave energy converters. In Progress in Renewable Energies Offshore; Guedes Soares, C., Ed.; Taylor & Francis Group: London, UK, 2016; pp. 703–710. [Google Scholar]
- Pecher, A.; Foglia, A.; Kofoed, J.P. Comparison and sensitivity investigations of a CALM and SALM type mooring system for wave energy converters. J. Mar. Sci. Eng. 2014, 2, 93–122. [Google Scholar] [CrossRef]
- Pham, H.D.; Cartraud, P.; Schoefs, F.; Soulard, T.; Berhault, C. Dynamic modeling of nylon mooring lines for a floating wind turbine. Appl. Ocean. Res. 2019, 87, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Huntley, M.B. Fatigue and Modulus Characteristics of Wire-Lay Nylon Rope. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, OCE, Monterey, CA, USA, 19–23 September 2016; pp. 5–10. [Google Scholar]
- Det Norske Veritas (DNV). Recommended Practice DNV-RP-C205; Det Norske Veritas AS: Høvik, Norway, 2018. [Google Scholar]
- Det Norske Veritas (DNV). Offshore Standards DNV-OS-E301; Det Norske Veritas AS: Høvik, Norway, 2018. [Google Scholar]
- Molin, B.; Chen, X.B. Approximations of the low-frequency second-order wave loads: Newman versus Rainey. In Proceedings of the 17th International Workshop on Water Waves and Floating Bodies, Cambridge, UK, 14–17 April 2002. [Google Scholar]
- Hosking, J.R. L-moments: Analysis and estimation of distributions using linear combinations of order statistics. J. Royal. Stat. Soc. Ser. B Methodol. 1990, 52, 105–124. [Google Scholar] [CrossRef]
- Neelamani, S.; Al-Salem, K.; Rakha, K. Extreme water waves in the UAE territorial waters. Emir. J. Eng. Res. 2006, 11, 37–46. [Google Scholar]
- Marghany, M. Synthetic Aperture Radar Imaging Mechanism for Oil Spills; Gulf Professional Publishing: Houston, TX, USA, 2019. [Google Scholar]
- Raed, K.; Guedes Soares, C. Variability effect of the drag and inertia coefficients on the Morison wave force acting on a fixed vertical cylinder in irregular waves. Ocean Eng. 2018, 159, 66–75. [Google Scholar] [CrossRef]
- Det Norske Veritas (DNV). HydroD User Manual; DNV Software: Høvik, Norway, 2014. [Google Scholar]
- Det Norske Veritas (DNV). DeepC User Manual; DNV Software: Høvik, Norway, 2010. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Energy Converter | ||
|---|---|---|
| Diameter, D | 10 | m |
| Draft, Db | 12 | m |
| h1 | 5 | m |
| Weight | 832,598 | kg |
| Submerged volume | 811 | m3 |
| Vertical section area | 109.3 | m2 |
| Mean Loads | Force (kN) |
|---|---|
| Current | 33.63 |
| Wave drift (Simple) | 78.63 |
| Wave drift (Diffraction) | 29.69 |
| Total (Simple) | 112.26 |
| Total (Diffraction) | 63.32 |
| Wave Loads | Force (MN) | |
|---|---|---|
| Regular | - | 3.10 |
| Irregular Morison | Significant | 3.04 |
| Maximum | 5.78 | |
| Irregular Diffraction | Significant | 2.61 |
| Maximum | 4.96 |
| Length | Weight | EA | T Break | |
|---|---|---|---|---|
| (m) | (N/m) | (MN) | (MN) | |
| Diameter1: 36 mm | 300 | 243 | 116.64 | 1.125 |
| Diameter2: 44 mm | 300 | 363 | 174.24 | 1.654 |
| Materials | Diameter | Length | Weight | EA | Tbreak |
|---|---|---|---|---|---|
| (mm) | (m) | (N/m) | (MN) | (MN) | |
| Chain | 26 | 10 | 126 | 60.84 | 0.598 |
| Synthetic Fibre rope | 100 | 80 | 67 | 1000.00 | 5.250 |
| Chain | 45 | 210 | 380 | 182.25 | 1.726 |
| Materials | Diameter | Length | Weight | EA | Tbreak |
|---|---|---|---|---|---|
| (mm) | (m) | (N/m) | (MN) | (MN) | |
| Chain | 32 | 10 | 192 | 92.16 | 0.895 |
| Synthetic Fibre rope | 120 | 80 | 97 | 1440.00 | 7.56 |
| Chain | 54 | 210 | 547 | 262.64 | 2.44 |
| Case 1 | Pre-Tension | Mean Force | Mean Offset | Stiffness |
|---|---|---|---|---|
| (kN) | (kN) | (m) | (kN/m) | |
| Minimum Diameter | 10 | 63.32 | 12.5 | 13 |
| 20 | 7.1 | 14 | ||
| 30 | 4.3 | 15 | ||
| Increased Diameter | 10 | 13.8 | 11 | |
| 20 | 8.0 | 12 | ||
| 30 | 4.9 | 13 |
| Case 2 | Pre-Tension | Mean Force | Mean Offset | Stiffness |
|---|---|---|---|---|
| (kN) | (kN) | (m) | (kN/m) | |
| Minimum Diameter | 10 | 63.32 | 5.6 | 21 |
| 20 | 3.6 | 22 | ||
| 30 | 2.4 | 25 | ||
| Increased Diameter | 10 | 5.8 | 21 | |
| 20 | 3.5 | 22 | ||
| 30 | 2.3 | 25 |
| Pre-Tension (kN) | Mean Offset (m) | Stiffness (kN/m) | Significant Amplitude Morison (m) | Maximum Amplitude Morison (m) | |
|---|---|---|---|---|---|
| D1: 36 mm | 10 | 12.5 | 13 | 2.69 | 5.11 |
| 20 | 7.1 | 14 | 2.70 | 5.13 | |
| 30 | 4.3 | 15 | 2.70 | 5.13 | |
| D2: 44 mm | 10 | 13.8 | 11 | 2.69 | 5.11 |
| 20 | 8.0 | 12 | 2.70 | 5.13 | |
| 30 | 4.9 | 13 | 2.73 | 5.19 |
| Pre-Tension (kN) | Mean Offset (m) | Stiffness (kN/m) | Significant Amplitude Morison (m) | Maximum Amplitude Morison (m) | |
|---|---|---|---|---|---|
| D1: 36 mm | 10 | 12.5 | 13 | 2.48 | 4.71 |
| 20 | 7.1 | 14 | 2.49 | 4.73 | |
| 30 | 4.3 | 15 | 2.50 | 4.75 | |
| D2: 44 mm | 10 | 13.8 | 11 | 2.48 | 4.71 |
| 20 | 8.0 | 12 | 2.49 | 4.73 | |
| 30 | 4.9 | 13 | 2.49 | 4.73 |
| Pre-Tension (kN) | Mean Offset (m) | Stiffness (kN/m) | Significant Amplitude Morison (m) | Maximum Amplitude Morison (m) | |
| Minimum Diameter | 10 | 5.6 | 21 | 2.7 | 5.1 |
| 20 | 3.6 | 22 | 2.7 | 5.1 | |
| 30 | 2.4 | 25 | 2.7 | 5.1 | |
| Increased Diameter | 10 | 5.8 | 21 | 2.6 | 4.9 |
| 20 | 3.5 | 22 | 2.7 | 5.1 | |
| 30 | 2.3 | 25 | 2.7 | 5.1 |
| Pre-Tension (kN) | Mean Offset (m) | Stiffness (kN/m) | Significant Amplitude Morison (m) | Maximum Amplitude Morison (m) | |
| Minimum Diameter | 10 | 5.6 | 21 | 2.5 | 4.8 |
| 20 | 3.6 | 22 | 2.5 | 4.8 | |
| 30 | 2.4 | 25 | 2.5 | 4.8 | |
| Increased Diameter | 10 | 5.8 | 21 | 2.4 | 4.6 |
| 20 | 3.5 | 22 | 2.5 | 4.8 | |
| 30 | 2.3 | 25 | 2.5 | 4.8 |
| Pre-Tension (kN) | Top Angle | T0 | X0 | x0 | Xmean | LLift-Max | XTOT | XC | TMax | u |
|---|---|---|---|---|---|---|---|---|---|---|
| (deg.) | (kN) | (m) | (m) | (m) | (m) | (m) | (m) | (kN) | ||
| 10 | 27 | 22.2 | 277.7 | 59.0 | 12.5 | 294.7 | 294.9 | 17.2 | 218.7 | 0.348 |
| 20 | 38 | 32.2 | 283.1 | 86.7 | 7.1 | 294.9 | 294.9 | 11.8 | 219.1 | 0.349 |
| 30 | 45 | 42.2 | 285.9 | 107.7 | 4.3 | 295.4 | 294.9 | 9.0 | 219.7 | 0.350 |
| Pre-Tension (kN) | Top Angle | T0 | X0 | x0 | Xmean | LLift-Max | XTOT | XC | TMax | u |
|---|---|---|---|---|---|---|---|---|---|---|
| (deg.) | (kN) | (m) | (m) | (m) | (m) | (m) | (m) | (kN) | ||
| 10 | 21 | 28.2 | 274.2 | 46.7 | 13.8 | 220.9 | 292.7 | 18.5 | 189.1 | 0.205 |
| 20 | 32 | 38.2 | 280.1 | 69.5 | 8.0 | 221.1 | 292.8 | 12.7 | 189.3 | 0.205 |
| 30 | 39 | 48.2 | 283.2 | 86.9 | 4.9 | 221.3 | 292.8 | 9.6 | 189.7 | 0.205 |
| Pre-Tension (kN) | Top Angle | T0 | X0 | x0 | Xmean | LLift-Max | XTOT | XC | TMax | u |
|---|---|---|---|---|---|---|---|---|---|---|
| (deg.) | (kN) | (m) | (m) | (m) | (m) | (m) | (m) | (kN) | ||
| 10 | 45 | 14.2 | 284.9 | 84.2 | 5.6 | 295.6 | 295.3 | 10.4 | 313.0 | 0.937 |
| 20 | 53 | 25.1 | 287.0 | 99.8 | 3.6 | 296.0 | 295.3 | 8.3 | 314.1 | 0.940 |
| 30 | 57 | 35.9 | 288.2 | 112.8 | 2.4 | 297.3 | 295.3 | 7.2 | 316.8 | 0.945 |
| Pre-Tension (kN) | Top Angle | T0 | X0 | x0 | Xmean | LLift-Max | XTOT | XC | TMax | u |
|---|---|---|---|---|---|---|---|---|---|---|
| (deg.) | (kN) | (m) | (m) | (m) | (m) | (m) | (m) | (kN) | ||
| 10 | 39 | 15.8 | 283.6 | 78.3 | 5.8 | 248.9 | 294.1 | 10.6 | 310.7 | 0.621 |
| 20 | 48 | 26.7 | 285.9 | 90.7 | 3.5 | 249.2 | 294.1 | 8.3 | 311.6 | 0.623 |
| 30 | 53 | 37.6 | 287.1 | 101.0 | 2.3 | 250.1 | 294.2 | 7.1 | 314.0 | 0.628 |
| Top Angle | T0 | X0 | x0 | Xmean | LLift-Max | XTOT | XC | Tmax | |
|---|---|---|---|---|---|---|---|---|---|
| Increasing Pre-tension | Increase | Increase | Increase | Increase | Decrease | Increase slightly | Constant | Decrease | Increase slightly |
| Increasing Diameter | Decrease | Increase | Decrease | Decrease | Increase | Decrease | Decrease slightly | Increase slightly | Decrease |
| Case | Static Tension (T0) | Static Tension (T0) | Difference (%) |
|---|---|---|---|
| Quasi-Static | DeepC | ||
| (kN) | (kN) | ||
| Case 1, TH0 = 30 kN | 40.6 | 41.6 | 2.5 |
| Case 2, TH0 = 10 kN | 14.02 | 14.2 | 1.5 |
| Case 2, TH0 = 30 kN | 35.8 | 34.9 | 2.5 |
| Case | Max Tension Cable 1 | Max Tension Cable 2 | Max Tension Cable 3 |
|---|---|---|---|
| (TMax,1) | (TMax,2) | (TMax,3) | |
| (kN) | (kN) | (kN) | |
| Case 1, TH0 = 30 kN | 317.5 | 249.3 | 249.0 |
| Case 2, TH0 = 10 kN | 329.0 | 303.4 | 303.4 |
| Case 2, TH0 = 30 kN | 391.4 | 355.6 | 355.6 |
| Case | Max Tension (TMax) | Max Tension (TMax) | Difference (%) |
|---|---|---|---|
| Quasi-Static | DeepC | ||
| (kN) | (kN) | ||
| Case 1, TH0 = 30 kN | 219.7 | 317.5 | 30 |
| Case 2, TH0 = 10 kN | 313.0 | 329.0 | 5 |
| Case 2, TH0 = 30 kN | 316.8 | 391.4 | 20 |
| Case | Surge Max Excursion (Xc) | Surge Max Excursion (Xc) | Difference (%) |
|---|---|---|---|
| Quasi-Static | DeepC | ||
| (m) | (m) | ||
| Case 1, TH0 = 30 kN | 9.0 | 9.0 | 0.5 |
| Case 2, TH0 = 10 kN | 10.4 | 11.42 | 1 |
| Case 2, TH0 = 30 kN | 7.2 | 6.7 | 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Depalo, F.; Wang, S.; Xu, S.; Guedes Soares, C. Design and Analysis of a Mooring System for a Wave Energy Converter. J. Mar. Sci. Eng. 2021, 9, 782. https://doi.org/10.3390/jmse9070782
Depalo F, Wang S, Xu S, Guedes Soares C. Design and Analysis of a Mooring System for a Wave Energy Converter. Journal of Marine Science and Engineering. 2021; 9(7):782. https://doi.org/10.3390/jmse9070782
Chicago/Turabian StyleDepalo, Francesco, Shan Wang, Sheng Xu, and C. Guedes Soares. 2021. "Design and Analysis of a Mooring System for a Wave Energy Converter" Journal of Marine Science and Engineering 9, no. 7: 782. https://doi.org/10.3390/jmse9070782
APA StyleDepalo, F., Wang, S., Xu, S., & Guedes Soares, C. (2021). Design and Analysis of a Mooring System for a Wave Energy Converter. Journal of Marine Science and Engineering, 9(7), 782. https://doi.org/10.3390/jmse9070782