
Optimization of the Propulsive Efficiency of a Fast Catamaran



Abstract
:1. Introduction
2. The Propulsive Efficiency Optimization Problem
2.1. The Approach
2.2. RANSE Method
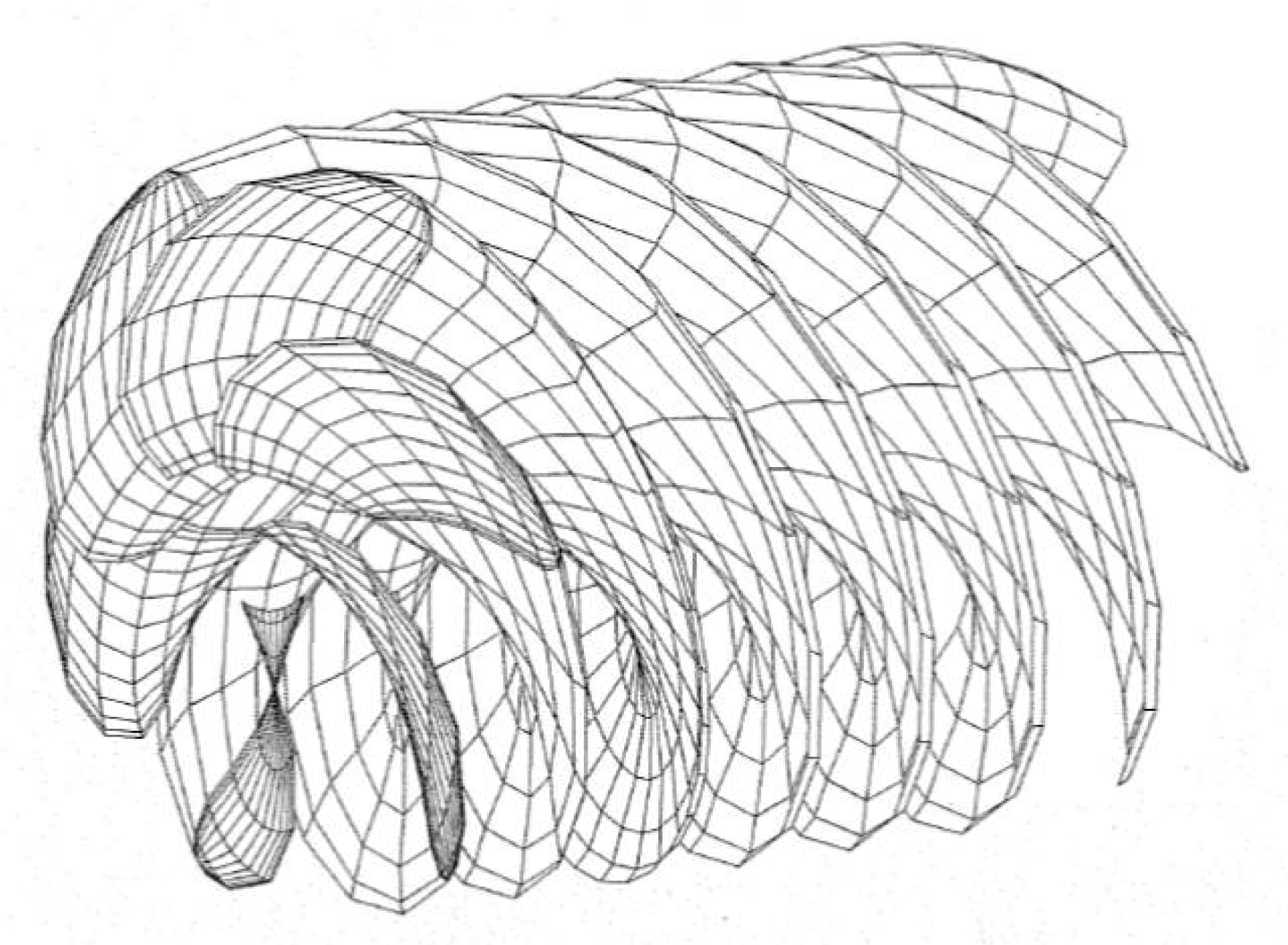
2.3. Propeller Vortex Lattice Method QCM
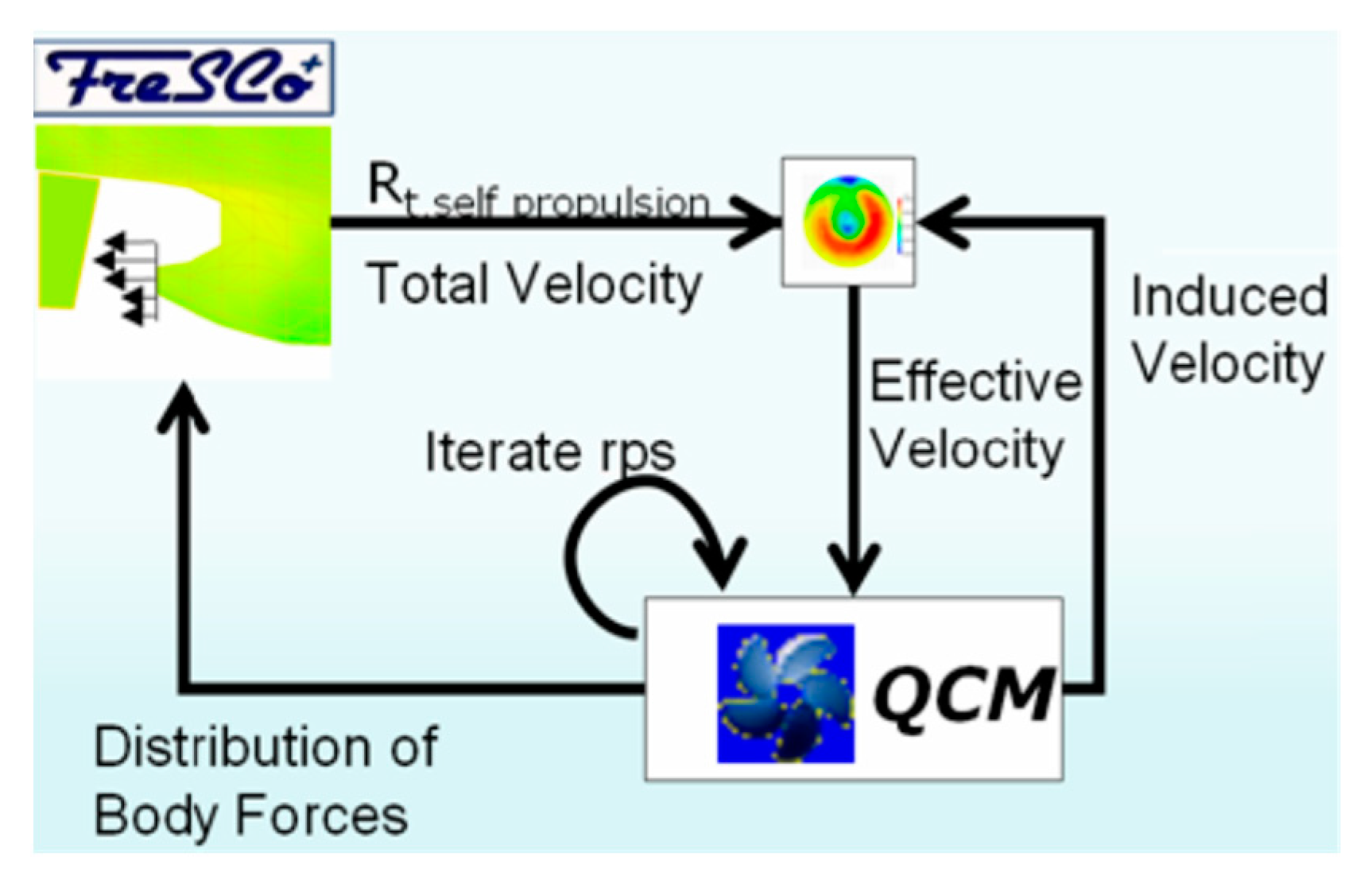
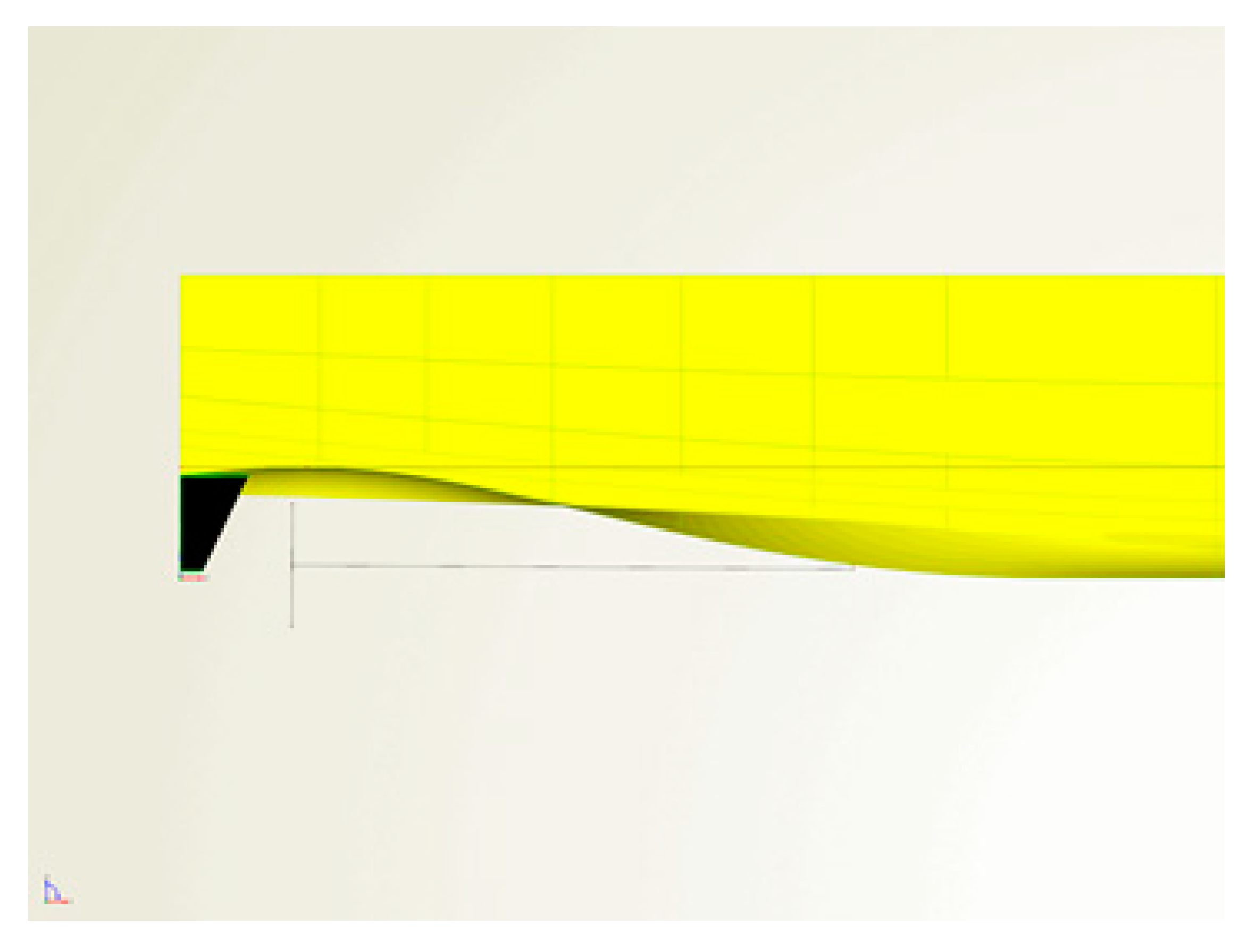
2.4. Numerical Self-Propulsion Using RANS-QCM Coupling
2.5. Local Optimization Studies
3. Experimental Verification and Validation of Numerical Results
3.1. Computational Setup
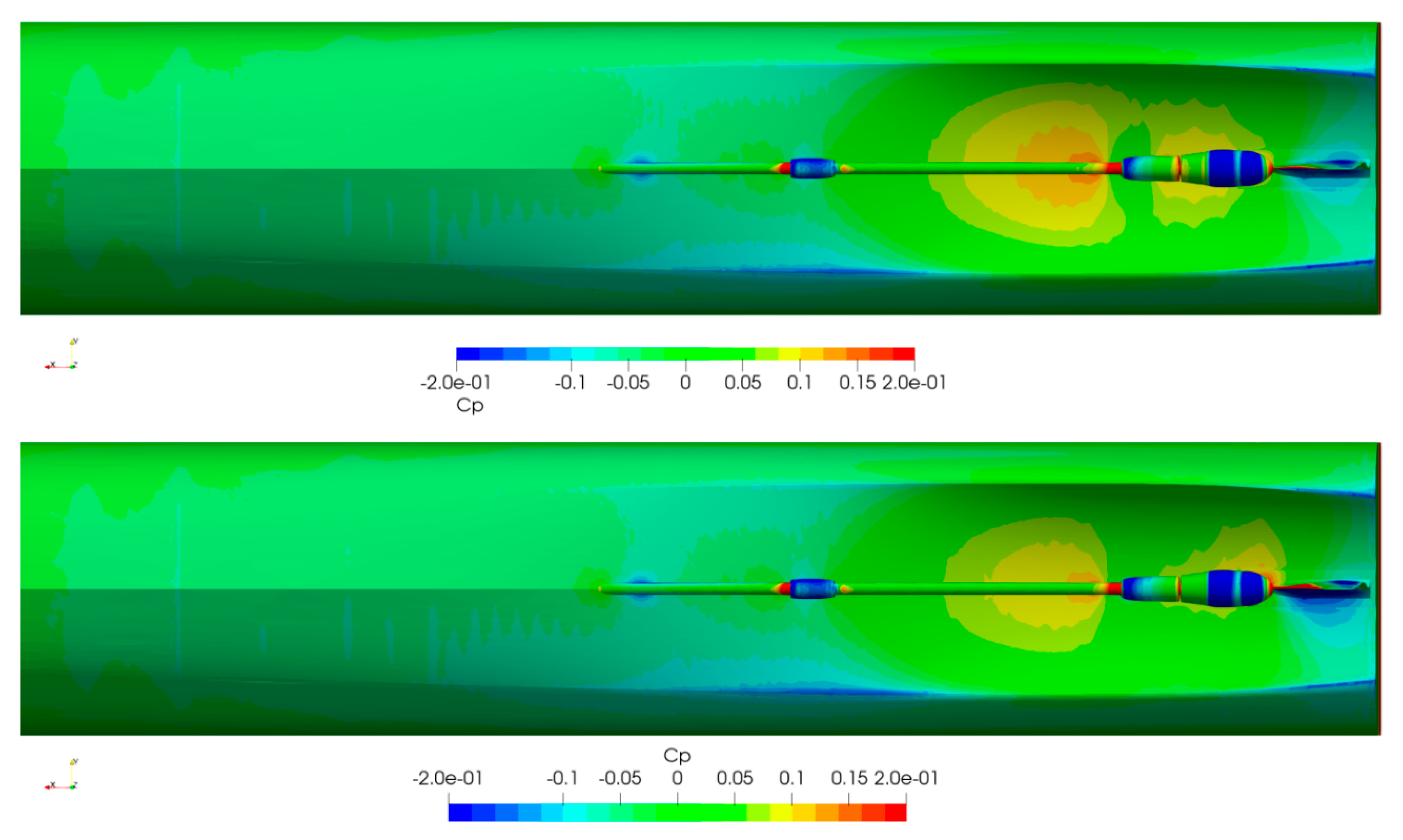
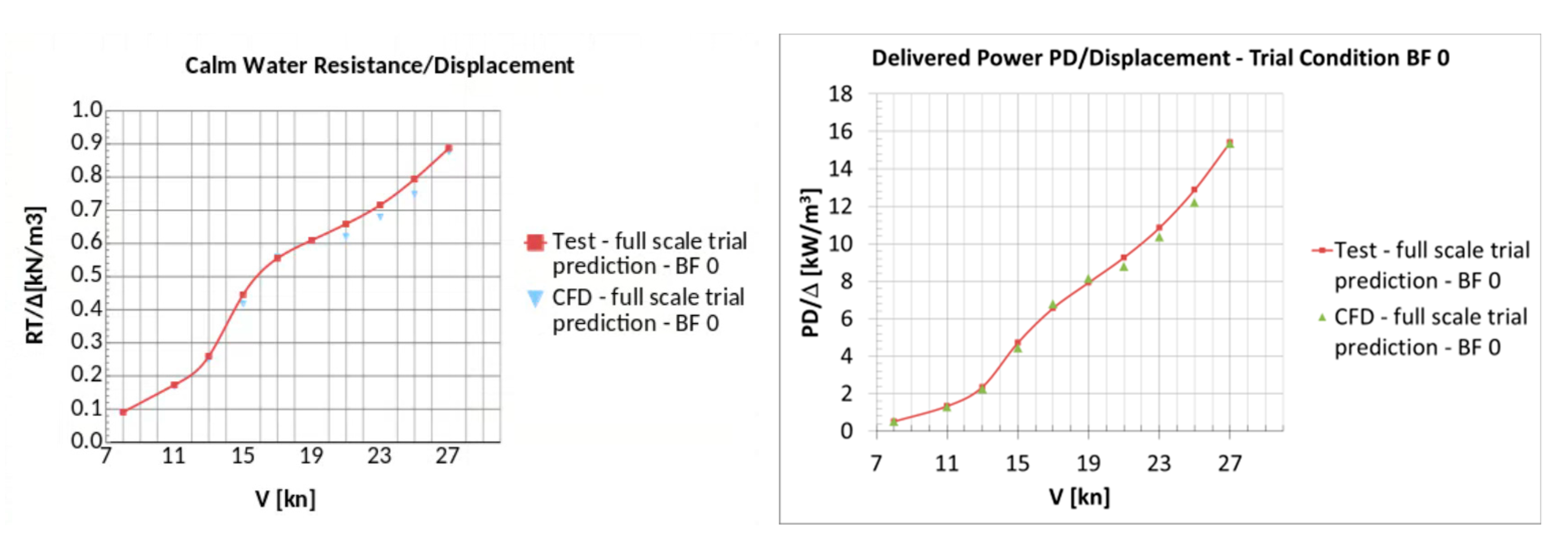
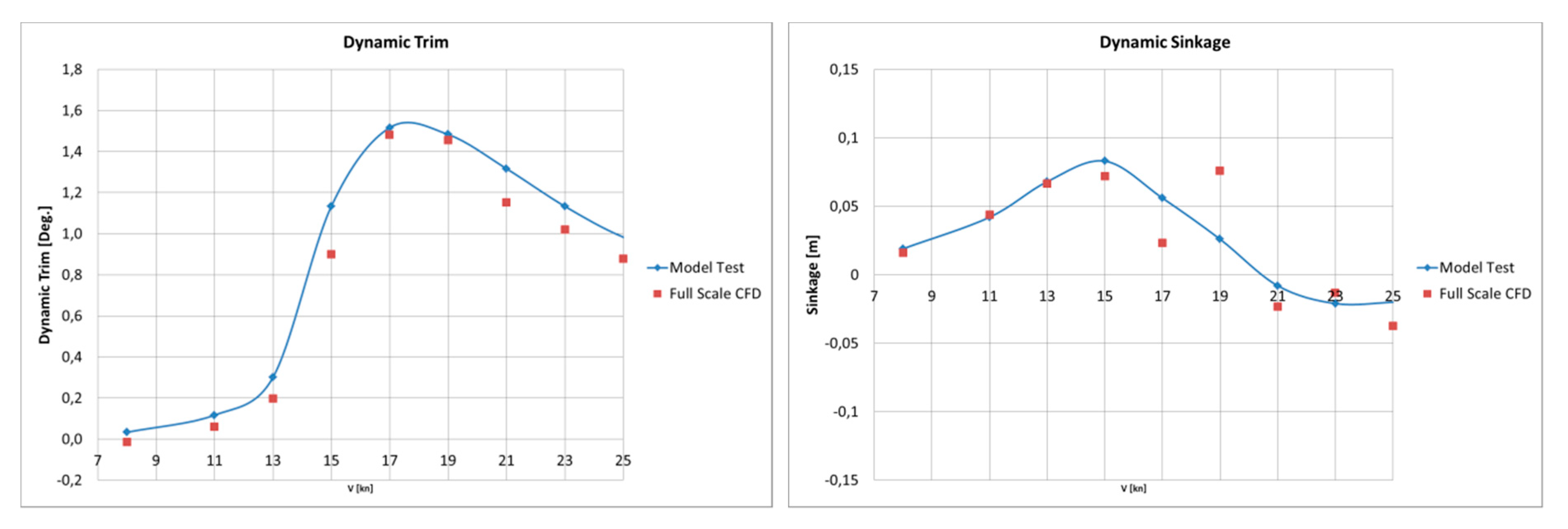
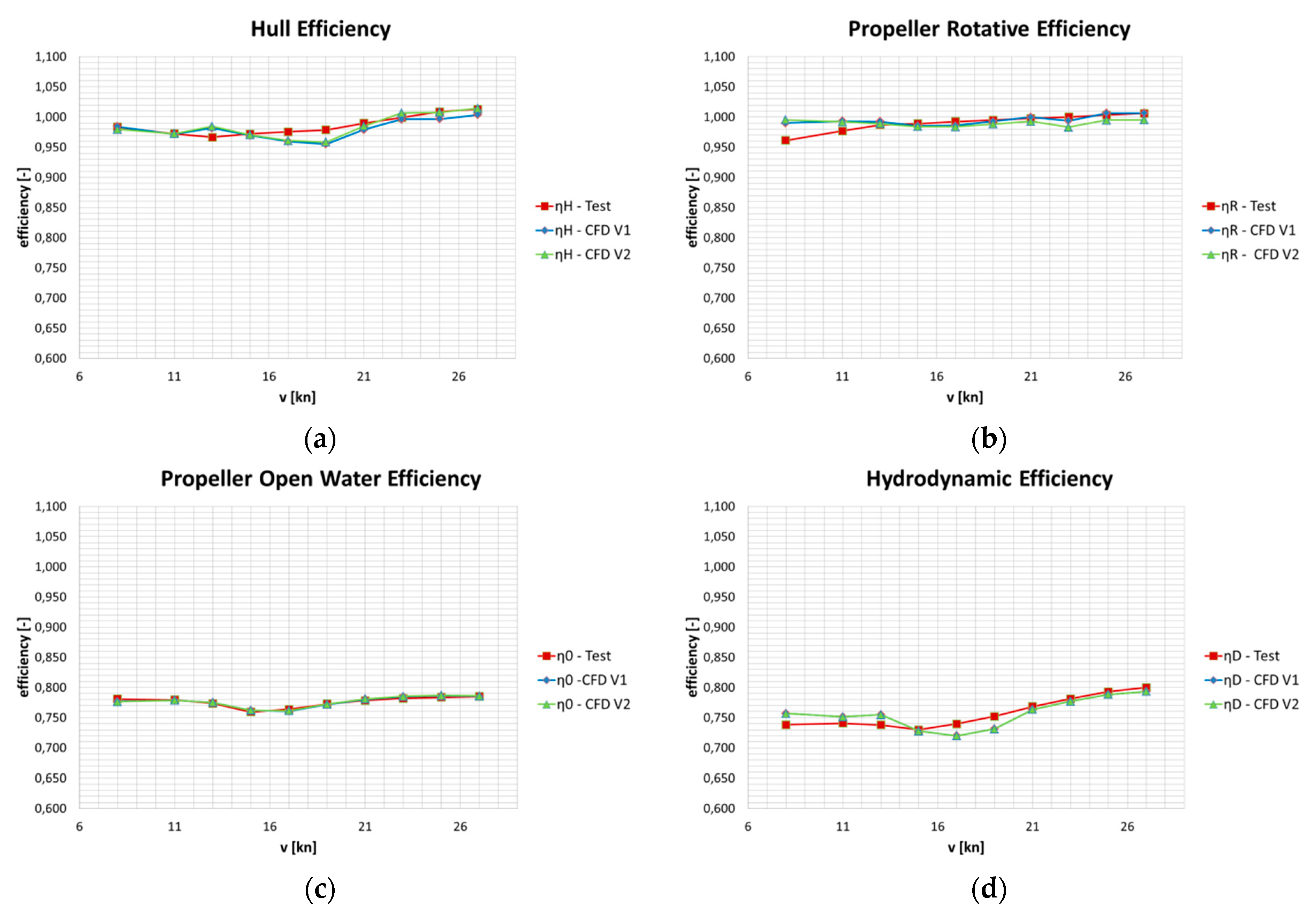
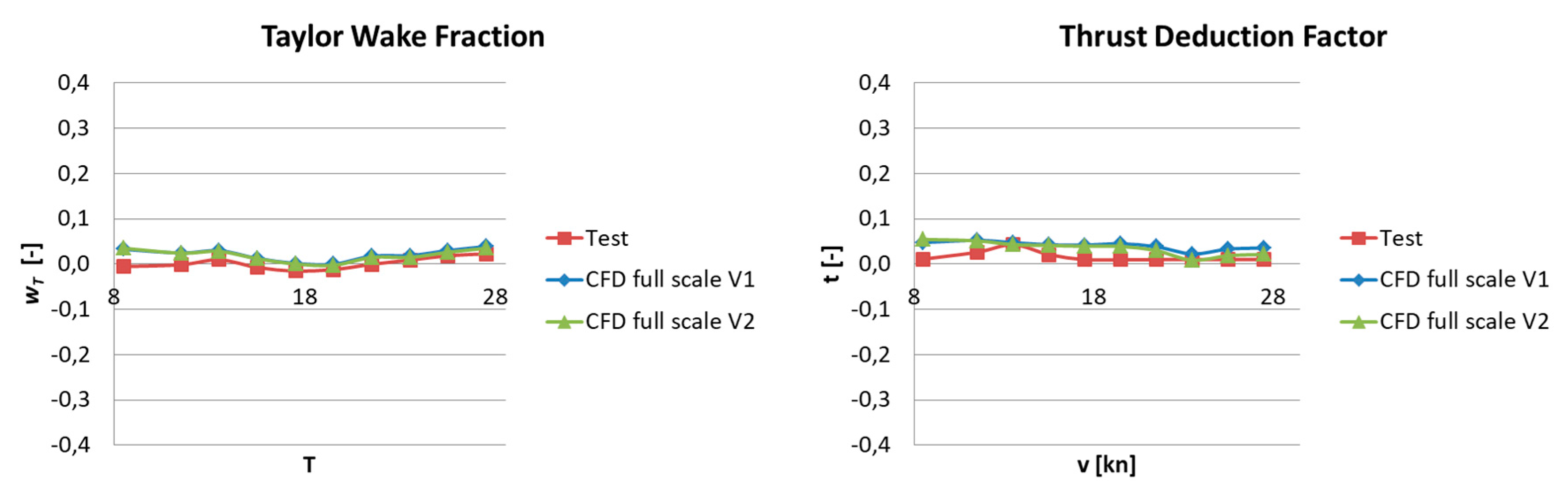
3.2. Discussion of Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Papanikolaou, A. Review of Advanced Marine Vehicles Concepts. In Proceedings of the 7th International High Speed Marine Vehicles Conference (HSMV05), Naples, Italy, 21–23 September 2005. [Google Scholar]
- Papanikolaou, A.; Kaklis, P.; Koskinas, C.; Spanos, D. Hydrodynamic Optimization of Fast Displacement Catamarans. In Proceedings of the 2lst International Symposium on Naval Hydrodynamics, ONR’ 96, Trondheim, Norway, 24–26 June 1996. [Google Scholar]
- Papanikolaou, A.; Zaraphonitis, G.; Androulakakis, M. Preliminary Design of a High-Speed SWATH Passenger Car/ Ferry. Mar. Technol. 1991, 28, 129–141. [Google Scholar]
- Skoupas, S.; Zaraphonitis, G.; Papanikolaou, A. Parametric Design and Optimisation of High-Speed Ro-Ro Passenger Ships. Ocean Eng. 2019, 189, 106346. [Google Scholar] [CrossRef]
- Papanikolaou, A.; Schellin, T.H. On Estimating Dynamic Wave Loads for Global Strength Analysis of α Catamaran Ferry. In Proceedings of the 7th Congress of the IMAM, Dubrovnik, Croatia, 26–30 April 1995. [Google Scholar]
- Zaraphonitis, G.; Papanikolaou, A.; Mourkoyiannis, D. Hull Form Optimization of High-Speed Vessels with Respect to wash and Powering. In Proceedings of the 8th International Marine Design Conference (IMDC), Athens, Greece, 5–8 May 2003. [Google Scholar]
- Papanikolaou, A.; Androulakakis, M. Hydrodynamic Optimization of High-Speed SWATH. In Proceedings of the 1st FAST ’91 Conference, Trondheim, Norway, 17–21 June 1991. [Google Scholar]
- Mittendorf, M.; Papanikolaou, A. Hydrodynamic hull form optimization of fast catamarans using surrogate models. Ship Technol. Res. 2021, 68, 14–26. [Google Scholar] [CrossRef]
- Papanikolaou, A.; Xing-Kaeding, Y.; Strobel, H.; Kanellopoulou, A.; Zaraphonitis, G.; Tolo, E. Numerical and Experimental Optimization Study on a Fast, Zero Emission Catamaran. J. Mar. Sci. Eng. 2020, 8, 657. [Google Scholar] [CrossRef]
- Papanikolaou, A. Review of the Design and Technology Challenges of Zero-Emission Battery-Driven Fast Marine Vehicles. J. Mar. Sci. Eng. 2020, 8, 941. [Google Scholar] [CrossRef]
- TrAM—Transport: Advanced and Modular, H2020 EU Research Project, Grant Agreement No 769303, H2020, (2018–2022). Available online: https://tramproject.eu/ (accessed on 25 August 2020).
- Hafermann, D. The New RANSE Code FreSCo for Ship Application. In Proceedings of the Jahrbuch der Schiffbautechnischen Gesellschaft (STG), Hamburg, Germany, 9 October 2007; Volume 101. [Google Scholar]
- Ferziger, J.H.; Peric, M. Computational Methods for Fluid Dynamics, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Rhie, C.M.; Chow, W.L. A numerical study for the turbulent past an isolated airflow with trailing edge separation. AIAA J. 1983, 17, 1525–1532. [Google Scholar] [CrossRef]
- Xing-Kaeding, Y.; Streckwall, H.; Gatchell, S. ESD Design and Analysis for validation bulk carrier. Int. Shipbuild. Prog. 2017, 63, 137–168. [Google Scholar] [CrossRef]
- Chao, K.Y.; Streckwall, H. Berechnung der Propellerumstroemung mit einer Vortex-Lattice Method. Jahrb. Schiffbautech. Ges. 1989, 83, 1989. [Google Scholar]
- Xing-Kaeding, Y.; Gatchell, S.; Streckwall, H. Towards Practical Design Optimization of Pre-Swirl Device and its Life Cycle Assessment. In Proceedings of the Fourth International Symposium on Marine Propulsors, SMP’15, Austin, TX, USA, 31 May–4 June 2015. [Google Scholar]
- Van Manen, J.D.; van Oossanen, P. Propulsion, Chapter VI in Principles of Naval Architecture; Lewis, E.L., Ed.; Publ. SNAME: Jersey, NJ, USA, 1988; ISBN 0-939773-01-05. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CLZ_ATS0 | Z coordinate of the centerline at transom |
| CLZ_ATX1_7m | Z coordinate of the centerline at tunnel |
| CHINEDZ_ATS0 | Z coordinate of the chine relative to centerline at transom |
| CHINEZ_AST2 | Z coordinate of the chine relative to Centerline at tunnel |
| CHINEY_ATS0 | Transom width definition |
| CHINEY_ATS2 | Tunnel width definition |
| D_Propeller | Propeller diameter |
| X_Propeller Z_Propeller Beta_Propeller | X coordinate of the propeller position Z coordinate of the propeller position Propeller inclination angle |
| Propeller Tip Clearance | Greater than 20% of Diameter of Propeller |
| Propeller Shaft Forward End Above the Hull Propeller Shaft Entry Above the Hull | Greater than certain value to guarantee the propeller shaft, gearbox and electric motor installation Greater than certain value to guarantee the propeller shaft, gearbox and electric motor installation |
| Propeller Shaft Inclination | Less than 5° |
| Z_max_prop | Propeller submergence at smallest displacement |
| LWL at Largest Displacement | Less than certain value |
| Height of Shaft Bracket Lead | Less than certain value to guarantee the propeller shaft installation |
| Height of Shaft Bracket Tail | Less than certain value to guarantee the propeller shaft installation |
| Longitudinal Position of Electric Motor Forward End | Less than certain value to guarantee the space for electric motor installation |
| V | Fn | ηD at Δ1 | ηD at Δ2 | ηD at Δ3 |
|---|---|---|---|---|
| [KTS] | [-] | [-] | [-] | [-] |
| 13.00 | 0.39 | 0.736 | 0.742 | 0.733 |
| 15.00 | 0.45 | 0.728 | 0.731 | 0.723 |
| 17.00 | 0.51 | 0.738 | 0.739 | 0.731 |
| 19.00 | 0.57 | 0.751 | 0.753 | 0.748 |
| 21.00 | 0.63 | 0.768 | 0.769 | 0.767 |
| 23.00 | 0.69 | 0.781 | 0.784 | 0.783 |
| 25.00 | 0.75 | 0.793 | 0.795 | 0.793 |
| 27.00 | 0.81 | 0.800 | 0.802 | 0.798 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing-Kaeding, Y.; Papanikolaou, A. Optimization of the Propulsive Efficiency of a Fast Catamaran. J. Mar. Sci. Eng. 2021, 9, 492. https://doi.org/10.3390/jmse9050492
Xing-Kaeding Y, Papanikolaou A. Optimization of the Propulsive Efficiency of a Fast Catamaran. Journal of Marine Science and Engineering. 2021; 9(5):492. https://doi.org/10.3390/jmse9050492
Chicago/Turabian StyleXing-Kaeding, Yan, and Apostolos Papanikolaou. 2021. "Optimization of the Propulsive Efficiency of a Fast Catamaran" Journal of Marine Science and Engineering 9, no. 5: 492. https://doi.org/10.3390/jmse9050492
APA StyleXing-Kaeding, Y., & Papanikolaou, A. (2021). Optimization of the Propulsive Efficiency of a Fast Catamaran. Journal of Marine Science and Engineering, 9(5), 492. https://doi.org/10.3390/jmse9050492