It is necessary to establish guidelines for ship route optimization to reflect the quality of ship routes. Further, different objective functions must be designed according to the optimization criteria to evaluate the performance of the route. This study uses the following three variables to measure the performance of routes: navigation time, meteorological risk, and fuel consumption.
2.2.1. Navigation Time
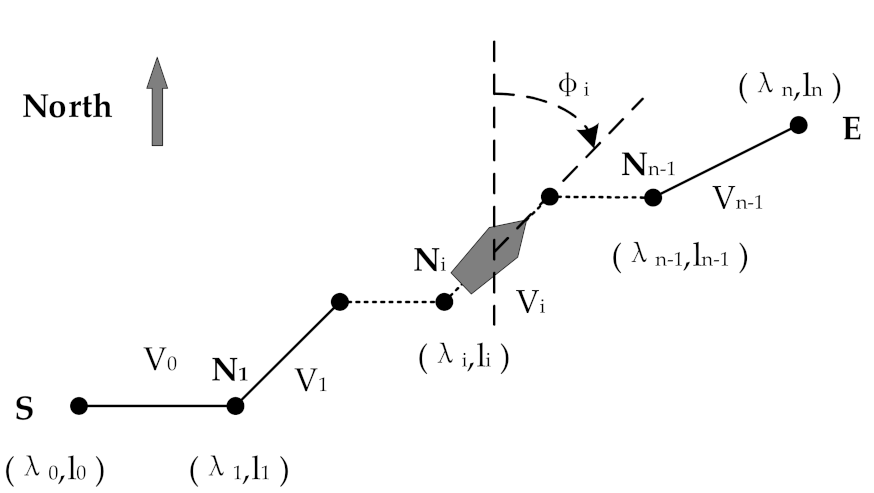
As shown in
Figure 2, the route planned in this study includes a series of waypoints. Therefore, the total navigation time of the ship from the departure point to the target point can be obtained by adding the time spent on each route, as shown in Equation (1).
Here,
is the total navigation time of the ship,
is the navigation time of the ship on each route section, and
is the actual speed of the ship on the
th route segment. If Earth is considered as an ellipsoid, the length of any two points on the Mercator projection map can be calculated as follows [
10]:
where
and
are the latitude and longitude coordinates of the first point, respectively,
and
are the latitude and longitude coordinates of the second point, respectively,
is the direction of the rhumb line,
is the distance between two points (in radians), and
is the eccentricity of Earth. The above formula can be applied to ships sailing along the non-isolatitude lines. However, in the case of isolatitude lines, i.e., when the ship’s heading is 90° or 270°, the following equation can be applied.
2.2.2. Meteorological Risk
It is necessary to understand the degree of threats to the safety of ship navigation caused by weather and ocean conditions. The IMO has given out information on how the captain should choose the route to avoid the navigation risk zone under severe sea conditions [
21], but it did not assess the overall risk status of the route. In this section, we comprehensively consider wind, waves, and seakeeping to assess ship navigation risks and propose a comprehensive risk calculation formula to adapt to route optimization under good and severe sea conditions.
According to the “2008 International Intact Stability Regulations” [
22], the stability criterion
should satisfy Equation (5) to ensure that ships navigate safely in strong winds.
where
represents the minimum overturning moment arm, which can be obtained from the dynamic stability curve and roll angle.
represents the wind pressure roll arm, and its value can be obtained using Equations (6) and (7).
where
represents the unit calculated wind pressure,
represents the wind area of the ship,
represents the height from the center of the wind area to the water surface,
represents the acceleration of gravity,
represents the ship displacement,
represents the wind pressure coefficient,
represents the air density, and
represents the average wind speed. Based on Equations (5)–(7), the crosswind speed that the ship can withstand 10 m above the sea surface should satisfy Equation (8).
According to the maximum crosswind that can be withstood by the ship, a numerical expression of the risk of wind to the ship is established, as shown in Equation (9), where
represents the lateral wind speed experienced by the ship. The risk is a gradual process. We think that when the value is greater than 0.6, it is unacceptable. When it is less than 0.6, a route with as low a risk value as possible should be chosen.
Under severe weather conditions, rolling is an important factor that causes a ship to capsize [
23]. Therefore, in this study, the risk value caused by waves is described according to the rolling of the ship. The encounter period between the ship and wave is shown in Equation (10).
where
represents the wavelength,
represents the shipping speed, and
represents the angle between the ship’s motion direction and wave direction.
The natural rolling period,
, of the ship can be calculated as follows:
where
represents the rolling period of the ship,
represents the width of the ship, and
represents the height of initial stability.
According to the resonance theory of a ship in waves, the ship is in the harmonic rolling area when
. In this area, a ship may have a large roll angle, threatening its safety [
23]. Therefore, we have established a numerical expression for the risk of waves to ships as follows.
According to Equation (12), there is an absolute risk when , and when it is less than 0.7, the risk gradually decreases.
To study the ship’s motion state in wind and waves, seakeeping is a factor that must be considered. There are many factors that affect seakeeping, such as the ship’s roll, pitch, heave, the probability of the green water on deck, the probability of slamming occurrence, and bow vertical acceleration, etc. In this study, seakeeping is determined by the following three factors: the amplitude of the pitch motion, the probability of slamming occurrence, and the probability of green water on deck. The limit values of the pitch amplitude are based on the NATO STANAG, Standardization Agreement, 4154 criteria, slamming probability and green water on deck probability comply with the NORDFORSK 1987 criteria [
24,
25], as detailed in
Table 1.
The ship’s risk obtained by considering seakeeping is determined according to Equation (13) [
26]:
where
is the root mean square (RMS) of the pitch motion amplitude,
is the probability of occurrence of slamming,
is the probability of water on deck.
Based on the ship Response Amplitude Operator, the RMS of the pitch motion amplitude is determined according to the following equation [
27,
28]:
where
is the speed-dependent pitch motion transfer function,
is the wave spectrum,
is the encounter wave frequency that satisfies the Doppler shift equation, depending on the absolute wave frequency, ω, and the factor
, where the vessel speed is denoted by
and
denotes the heading angle [
29].
where
is the threshold velocity,
is the swell up coefficient, and
is the ship draught at the forward perpendicular.
and
denote the zero-order and second-order spectral moments of the ship’s relative motion as regards the sea surface [
29].
where
is the freeboard at the ship forward perpendicular.
Based on the above analysis, we established the comprehensive risk of the ship being disturbed by winds and waves in the
th route segment as follows:
Because the navigation risk is a gradual process, when
, we believe that when the risk value is greater than 0.6, the route will be discarded. When the route value is less than 0.6, although the route is acceptable, it is still better to keep the risk value is as small as possible. The risk distribution of the entire route is
Therefore, the total risk of a route is





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}