
Predicting Ship Trajectory Based on Neural Networks Using AIS Data

Abstract
1. Introduction
Related Works
2. Materials and Methods
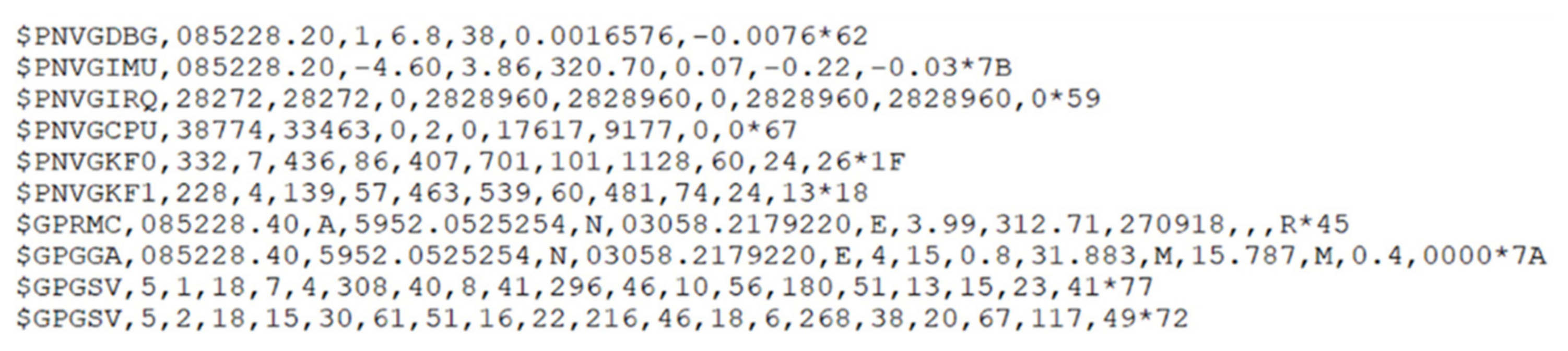
- Greenwich Mean Time at the moment of determining the location.
- Latitude.
- North/South (N/S).
- Longitude.
- West/East (E/W).
- GPS signal quality indicator:0 = Positioning is not possible or is not correct;1 = GPS mode, normal accuracy, location possible;2 = Differential GPS mode, normal accuracy, location possible;3 = GPS precision mode, location possible.
- The number of satellites used (0–12, may differ from the number of visible ones).
- Horizontal Dilution of Precision (HDOP).
- Receiver antenna height above/below sea level.
- Unit of antenna’s location height, meters.
- Geoid difference, i.e., the difference between the WGS-84 ellipsoid and the sea level (geoid), “-” = sea level is below the ellipsoid.
- Units of measurement, meters.
- GPS Differential Data Age—Time in seconds since the last SC104 type 1 or 9 update, filled with zeroes if the differential mode is not used.
- ID of the station transmitting differential corrections, ID, 0000-1023.
- Checksum.
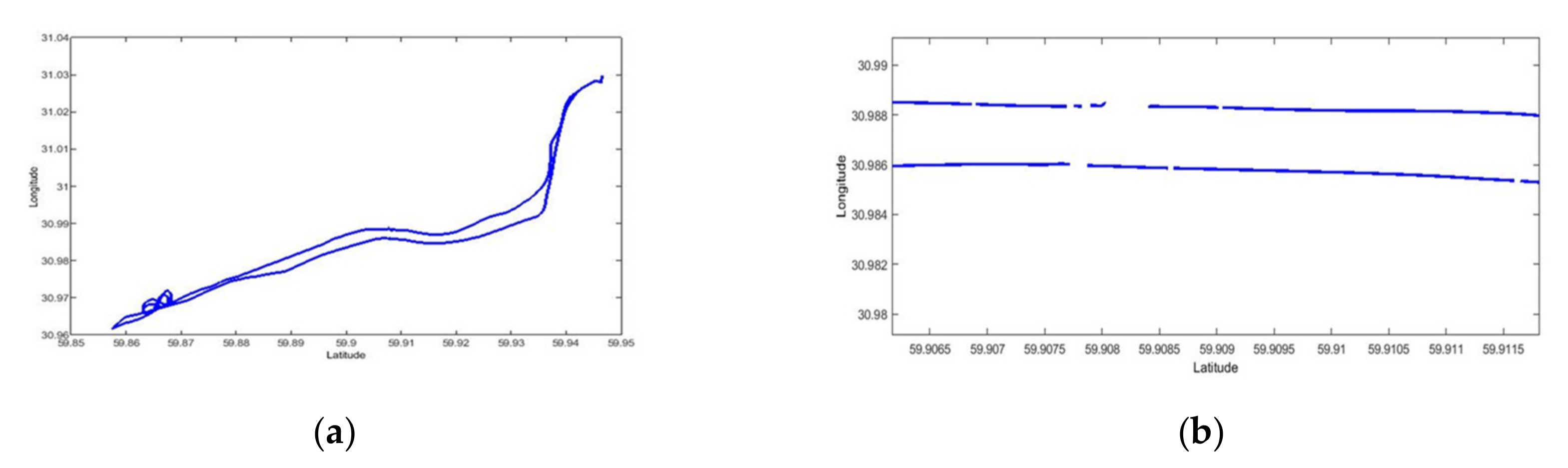
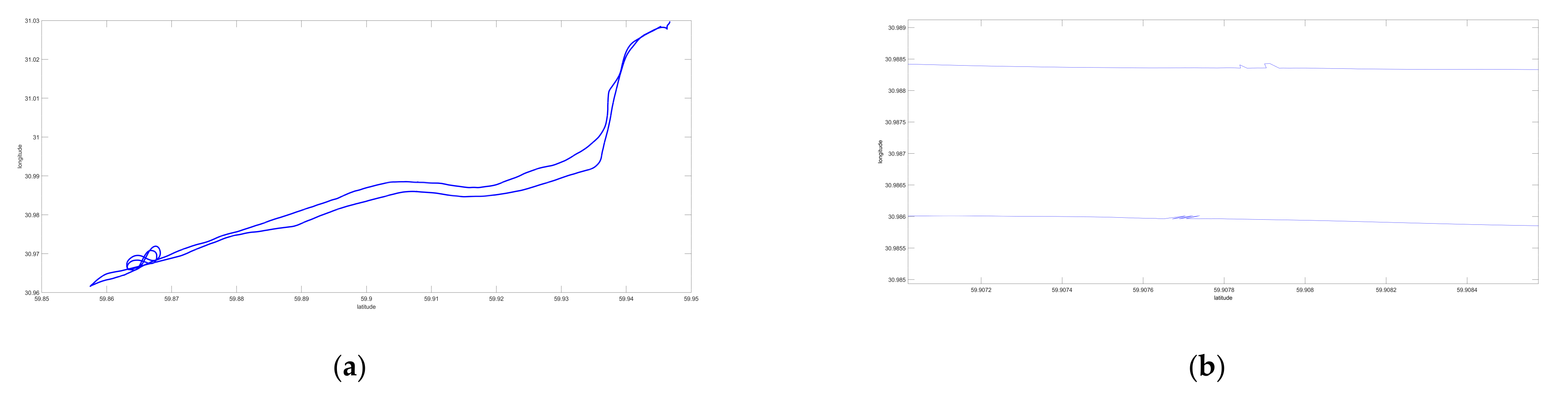
3. Results and Discussion
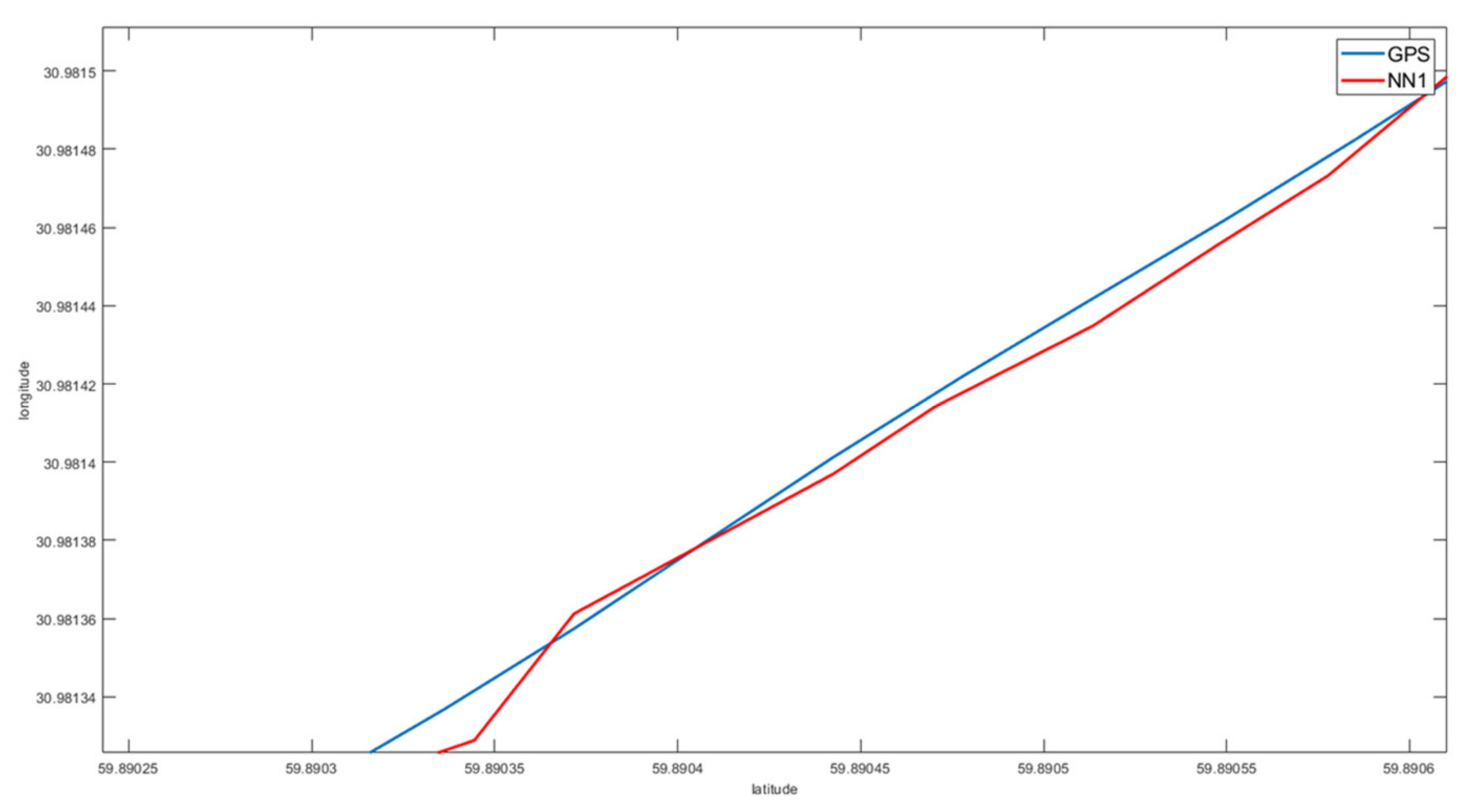
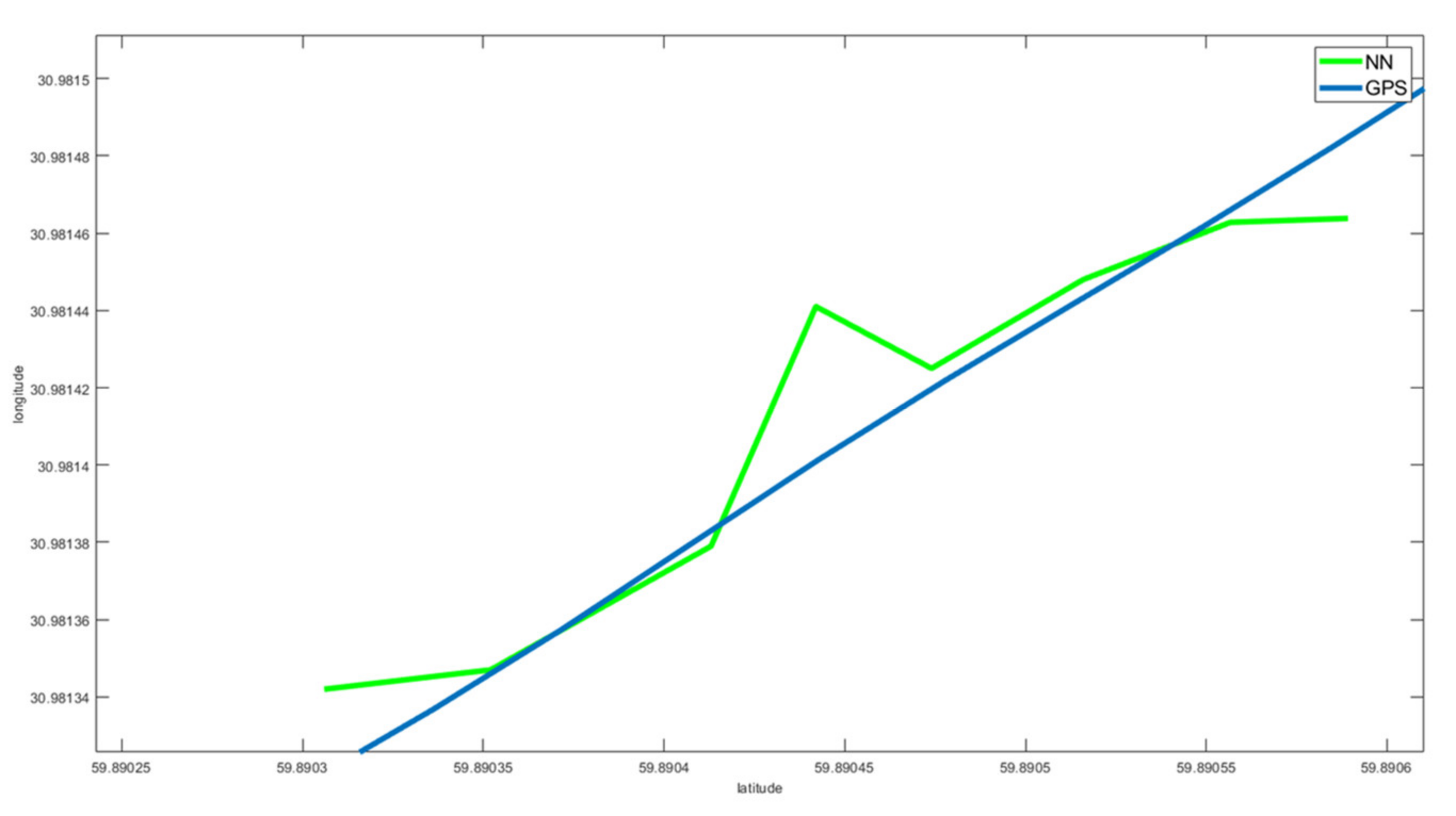
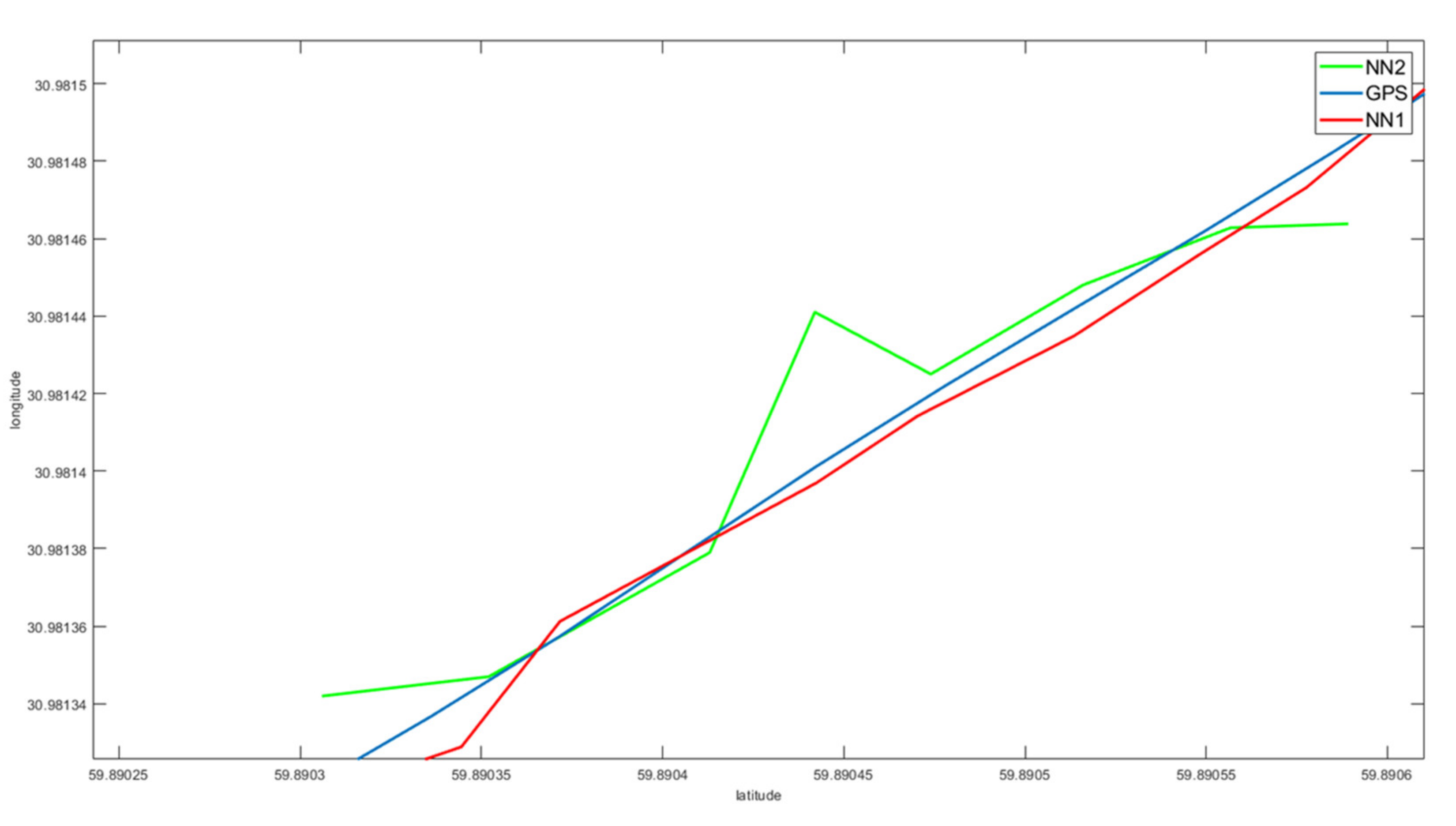
- the considered neural network can predict the trajectory of a vessel’s motion on straight sections; however, due to the accuracy of such a prediction, it is impossible to guarantee the safety of the vessel’s motion (Figure 8);
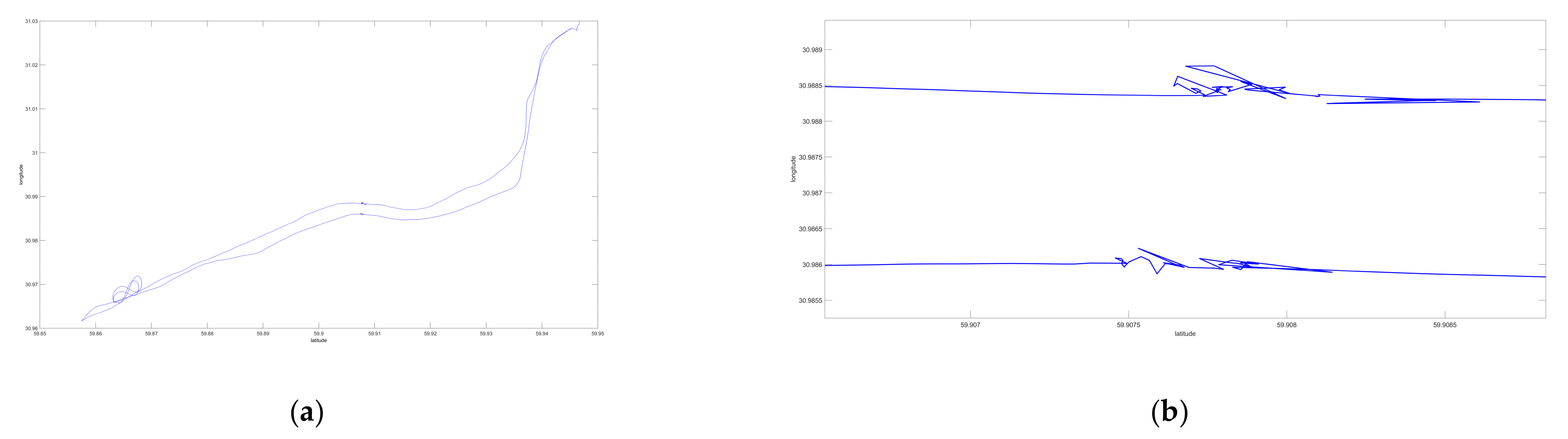
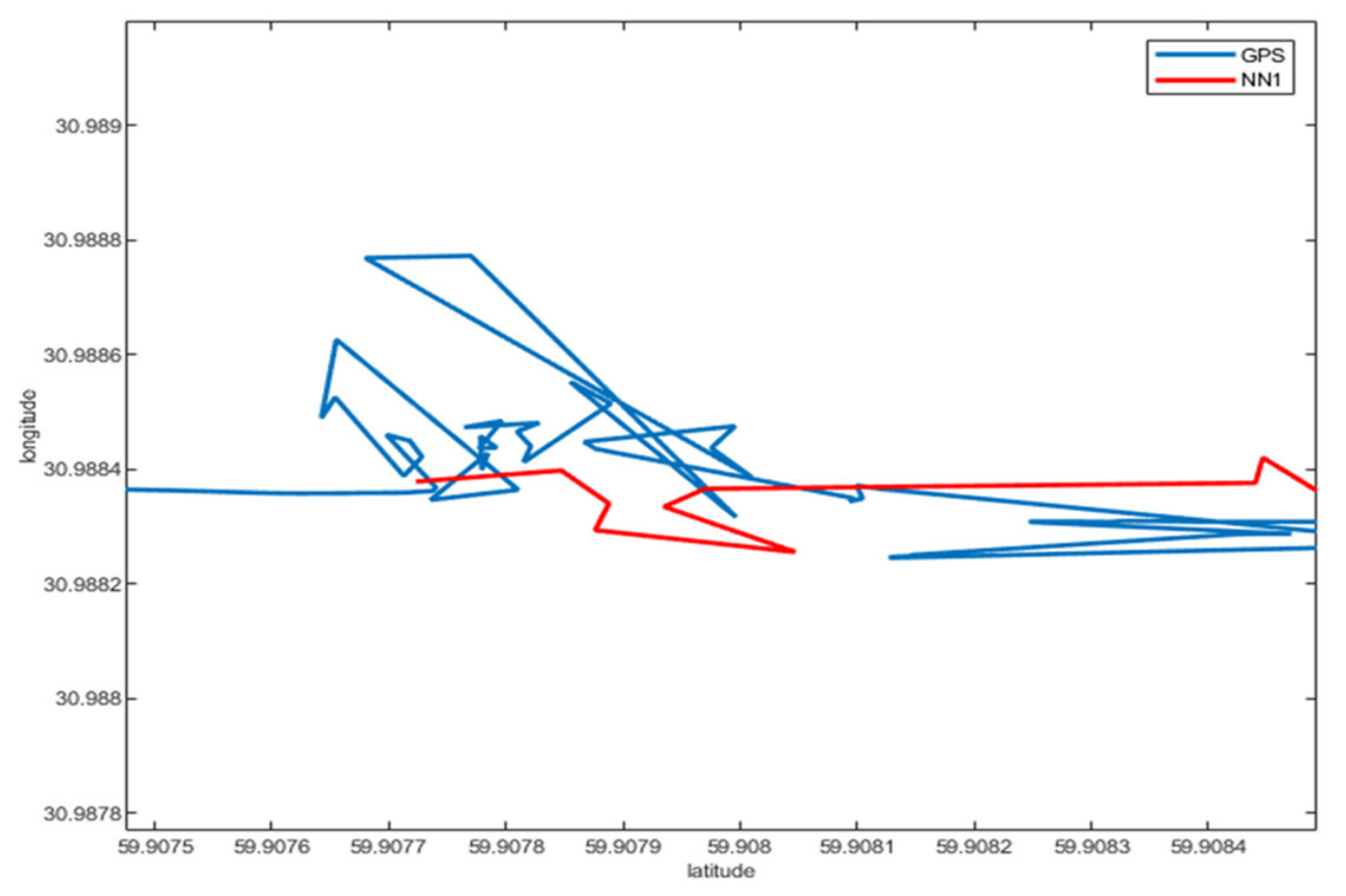
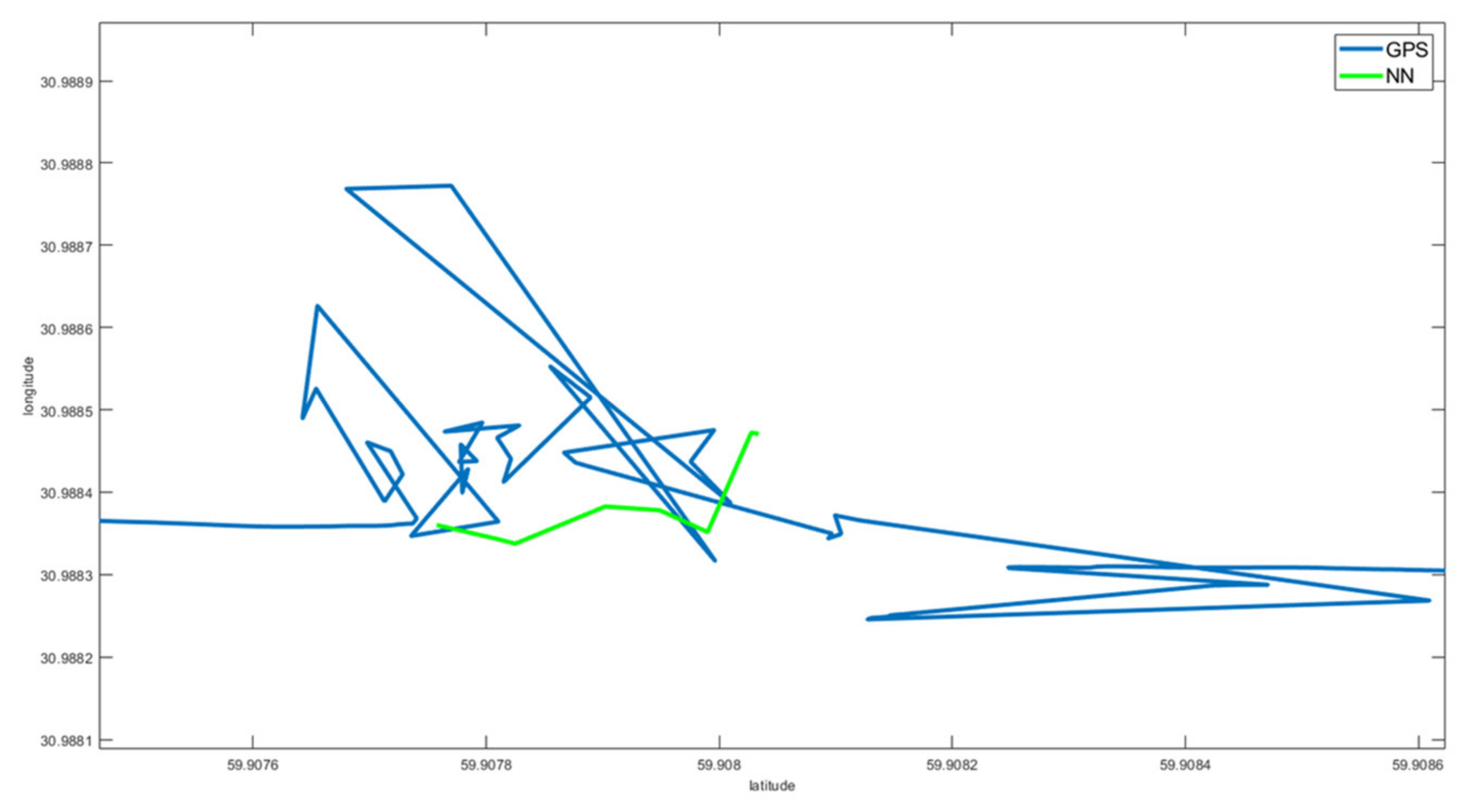
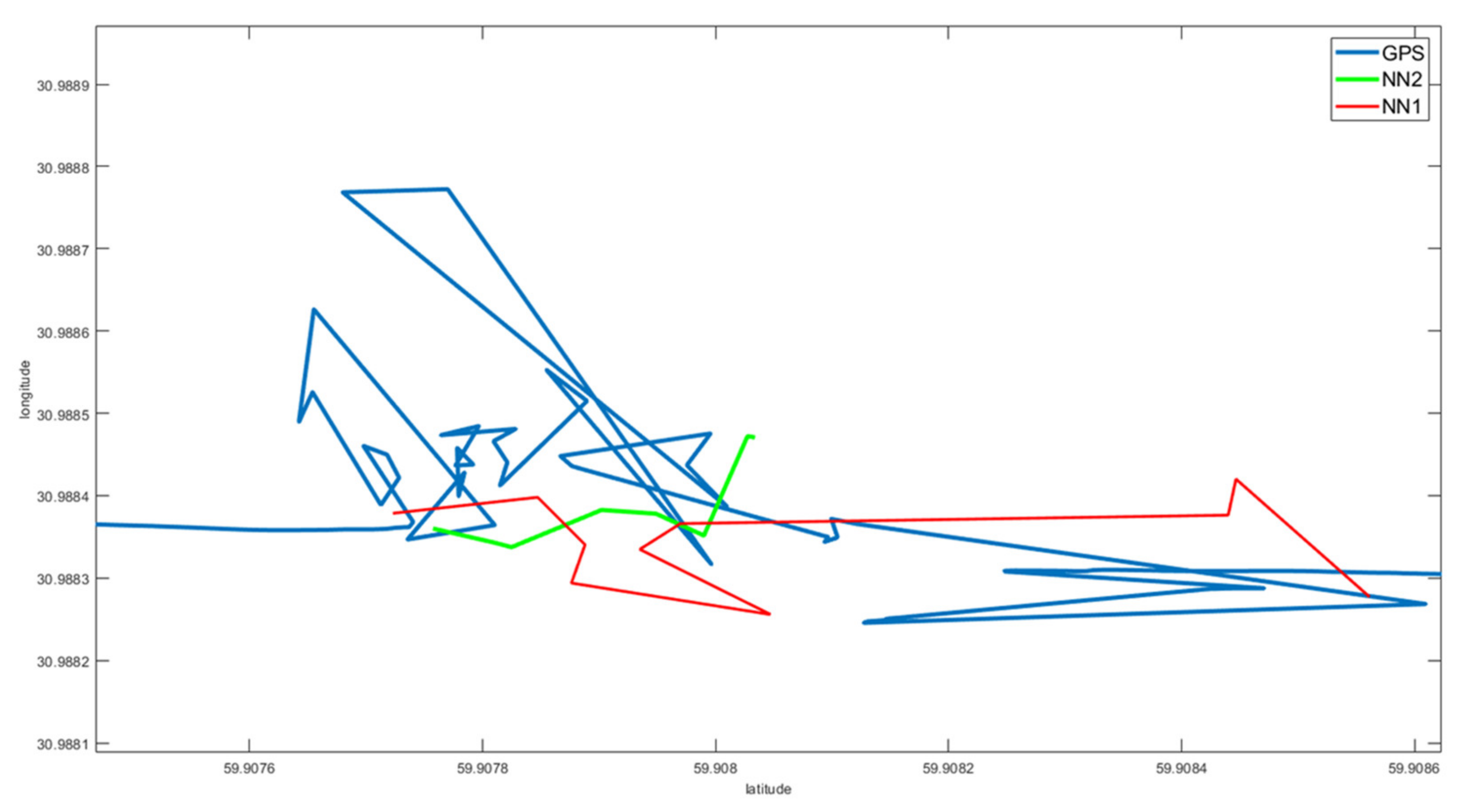
- in areas with GPS data loss or distortion, the first few iterations of the neural network show a good result, which can be seen in Figure 9;
- the developed neural network is not suitable for long-term use due to the lack of stable prediction quality.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sidibé, A.; Shu, G. Study of Automatic Anomalous Behaviour Detection Techniques for Maritime Vessels. J. Navig. 2017, 70, 847–858. [Google Scholar] [CrossRef]
- Dobrkovic, A.; Iacob, M.-E.; Hillegersberg, J. Using machine learning for unsupervised maritime waypoint discovery from streaming AIS data. In Proceedings of the 15th International Conference on Knowledge Technologies and Data-driven Business, Graz, Austria, 21–22 October 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Mao, S.; Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G.-B. An Automatic Identification System (AIS) Database for Maritime Trajectory Prediction and Data Mining. arXiv 2018, arXiv:1607.03306. Available online: https://arxiv.org/abs/1607.03306 (accessed on 26 December 2020).
- Alizadeh, D.; Alesheikh, A.; Sharif, M. Prediction of vessels locations and maritime traffic using similarity measurement of trajectory. Ann. GIS 2020. [Google Scholar] [CrossRef]
- Alizadeh, D.; Alesheikh, A.; Sharif, M. Vessel Trajectory Prediction Using Historical Automatic Identification System Data. J. Navig. 2021, 74, 156–174. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y.; Achuthan, K.; Zhang, X. A ship movement classification based on Automatic Identification System (AIS) data using Convolutional Neural Network. Ocean Eng. 2020, 218, 108182. [Google Scholar] [CrossRef]
- De Vries, G.K.D.; Van Someren, M. Machine learning for vessel trajectories using compression, alignments and domain knowledge. Expert Syst. Appl. 2012, 39, 13426–13439. [Google Scholar] [CrossRef]
- Murray, B.; Perera, L.P. A dual linear autoencoder approach for vessel trajectory prediction using historical AIS data. Ocean Eng. 2020, 209, 107478. [Google Scholar] [CrossRef]
- Soldi, G.; Gaglione, D.; Forti, N.; Di Simone, A.; Daffinà, F.C.; Bottini, G.; Quattrociocchi, D.; Millefiori, L.M.; Braca, P.; Carniel, S.; et al. Space-based Global Maritime Surveillance. Part II: Artificial Intelligence and Data Fusion Techniques. arXiv 2020, arXiv:2011.11338. [Google Scholar]
- Rong, H.; Teixeira, A.P.; Guedes Soares, C. Data mining approach to shipping route characterization and anomaly detection based on AIS data. Ocean Eng. 2020, 198, 106936. [Google Scholar] [CrossRef]
- Ahn, J.-H.; Rhee, K.; You, Y. A study on the collision avoidance of a ship using neural networks and fuzzy logic. Appl. Ocean Res. 2012, 37, 162–173. [Google Scholar] [CrossRef]
- Gao, M.; Shi, G.-Y. Ship-handling behavior pattern recognition using AIS sub-trajectory clustering analysis based on the T-SNE and spectral clustering algorithms. Ocean Eng. 2020, 205, 106919. [Google Scholar] [CrossRef]
- Xu, H.; Rong, H.; Guedes Soares, C. Use of AIS data for guidance and control of path-following autonomous vessels. Ocean Eng. 2019, 194, 106635. [Google Scholar] [CrossRef]
- Tu, E.; Zhang, G.; Mao, S.; Rachmawati, L.; Huang, G. Modeling Historical AIS Data for Vessel Path Prediction: A Comprehensive Treatment. arXiv 2020, arXiv:2001.01592. [Google Scholar]
- Borkowski, P. The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion. Sensors 2017, 17, 1432. [Google Scholar] [CrossRef]
- Tang, H.; Yin, Y.; Shen, H. A model for vessel trajectory prediction based on long short-term memory neural network. J. Mar. Eng. Technol. 2019, 18. [Google Scholar] [CrossRef]
- Zheng, H.; Negenborn, R.R.; Lodewijks, G. Trajectory tracking of autonomous vessels using model predictive control. IFAC Proc. Vol. 2014, 47, 8812–8818. [Google Scholar] [CrossRef]
- Xiao, Z.; Fu, X.; Zhang, L.; Goh, R.S.M. Traffic Pattern Mining and Forecasting Technologies in Maritime Traffic Service Networks: A Comprehensive Survey. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1796–1825. [Google Scholar] [CrossRef]
- Xiao, Z.; Fu, X.; Zhang, L.; Zhang, W.; Liu, R.W.; Liu, Z.; Goh, R.S. Big Data Driven Vessel Trajectory and Navigating State Prediction With Adaptive Learning, Motion Modeling and Particle Filtering Techniques. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Patroumpas, K.; Alevizos, E.; Artikis, A.; Vodas, M.; Pelekis, N.; Theodoridis, Y. Online event recognition from moving vessel trajectories. Geoinformatica 2017, 21, 389–427. [Google Scholar] [CrossRef]
- GeoStar Navigation. GEOS Module. NMEA Communications Protocol Ver. 3.0. Available online: http://geostar-navi.com/files/docs/geos3/geos_nmea_protocol_v3_0_eng.pdf (accessed on 25 December 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Value | Units |
|---|---|---|
| Maximum length | 35.65 | meters |
| Maximum width | 5.80 | meters |
| Side height | 2.60 | meters |
| Draft | 1.51 | meters |
| Displacement | 157 | tons |
| Main engine power | 2 × 200 | kW |
| Crew | 10 | man |
| Freeboard | 1.096 | meters |
| Endurance | 6 | days |
| Latitude | Longitude |
|---|---|
| 59.9466765683333 | 31.0296530033333 |
| 59.9466765750000 | 31.0296530366667 |
| 59.9466765833333 | 31.0296530600000 |
| 59.9466765916667 | 31.0296530766667 |
| 59.9466765900000 | 31.0296531200000 |
| 59.9466765883333 | 31.0296531333333 |
| 59.9466765733333 | 31.0296531333333 |
| Input Data | Output Data | Reference Data | |
|---|---|---|---|
| Latitude | 59.8665262166667 | 59.866514809161487 | 59.8665157383333 |
| Longitude | 30.970706225 | 30.969370218195859 | 30.9706893433333 |
| Input Data | Output Data | ||
|---|---|---|---|
| 59.8902644083333 | 30.9812980466667 | 59.8903520000000 | 30.9813470000000 |
| 59.8902644083333 | 30.9812980466667 | ||
| 59.8902644083333 | 30.9812980466667 | ||
| 59.8903000583333 | 30.9812980466667 | ||
| 59.8903000583333 | 30.9813171183333 | ||
| 59.8903000583333 | 30.9813171183333 | ||
| 59.8903000583333 | 30.9813171183333 | ||
| 59.8903000583333 | 30.9813171183333 | ||
| 59.8903360133333 | 30.9813171183333 | ||
| 59.8903060000000 | 30.9813420000000 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Volkova, T.A.; Balykina, Y.E.; Bespalov, A. Predicting Ship Trajectory Based on Neural Networks Using AIS Data. J. Mar. Sci. Eng. 2021, 9, 254. https://doi.org/10.3390/jmse9030254
Volkova TA, Balykina YE, Bespalov A. Predicting Ship Trajectory Based on Neural Networks Using AIS Data. Journal of Marine Science and Engineering. 2021; 9(3):254. https://doi.org/10.3390/jmse9030254
Chicago/Turabian StyleVolkova, Tamara A., Yulia E. Balykina, and Alexander Bespalov. 2021. "Predicting Ship Trajectory Based on Neural Networks Using AIS Data" Journal of Marine Science and Engineering 9, no. 3: 254. https://doi.org/10.3390/jmse9030254
APA StyleVolkova, T. A., Balykina, Y. E., & Bespalov, A. (2021). Predicting Ship Trajectory Based on Neural Networks Using AIS Data. Journal of Marine Science and Engineering, 9(3), 254. https://doi.org/10.3390/jmse9030254