
Cost-Effective Design of Port Approaches Using Simulation Methods Based on the Example of a Modernized Port in the Ustka




Abstract
1. Introduction
- Determination of:
- average ship dimensions and its characteristics like the power of the main engine, rudder type and its area or power of bow thruster,
- safety waterway parameters needed for the safe operation of maximal ships,
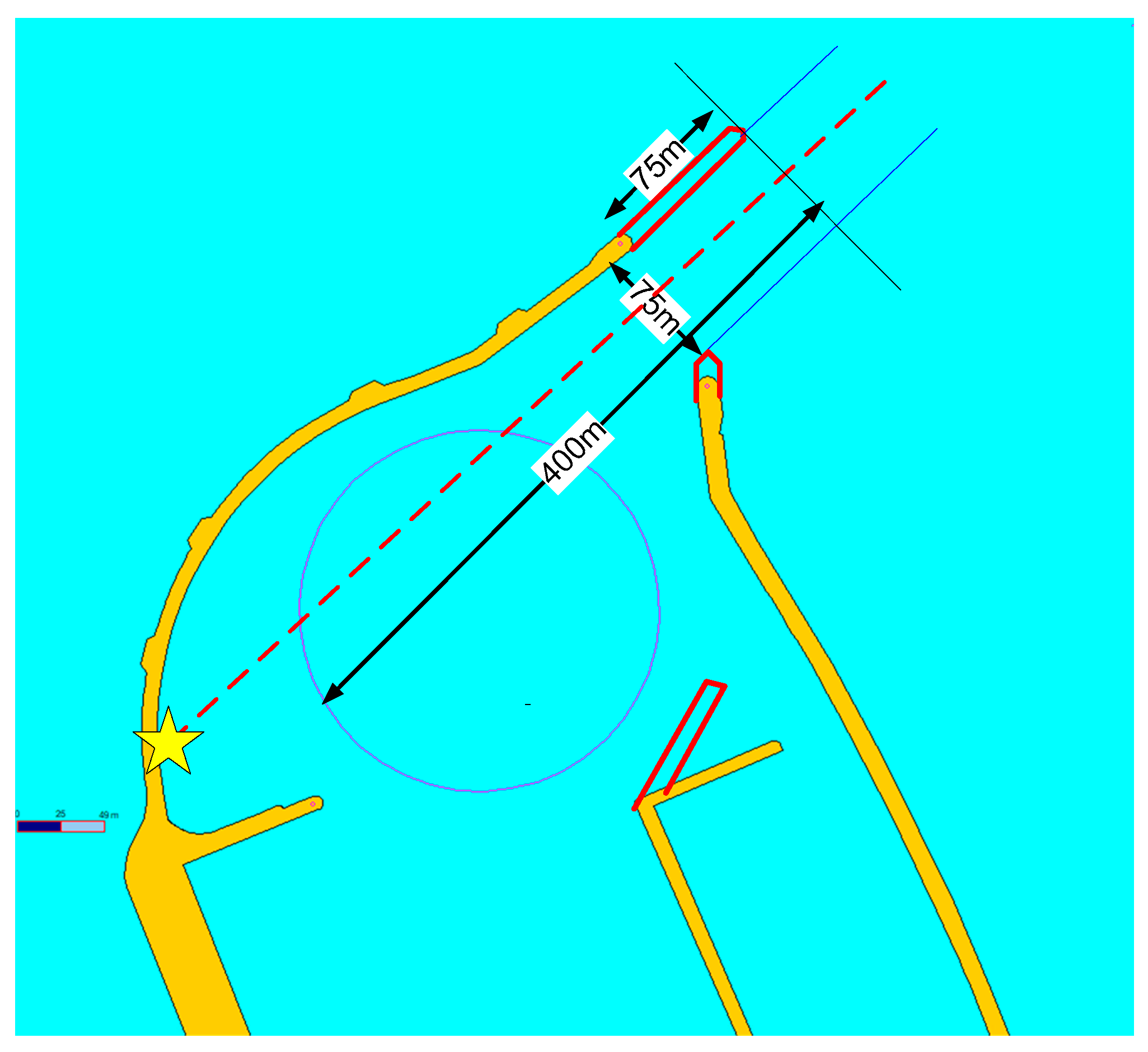
- turning place diameter concerning its shape.
- Determination of safety conditions of port operation for:
- admissible meteorological conditions for a given kind of ships and manoeuvres,
- other navigational conditions and limitations like the presence of other ships on berths, use of position fixing systems on the approach, navigational markings, and vessel traffic service.
- Determination of manoeuvring procedures during the entrance, berthing, un-berthing, exit port, and turning for different kinds of ships and propulsion systems.
- Determining the conditions of ship mooring inside the port.
2. The Ustka Port Case Study
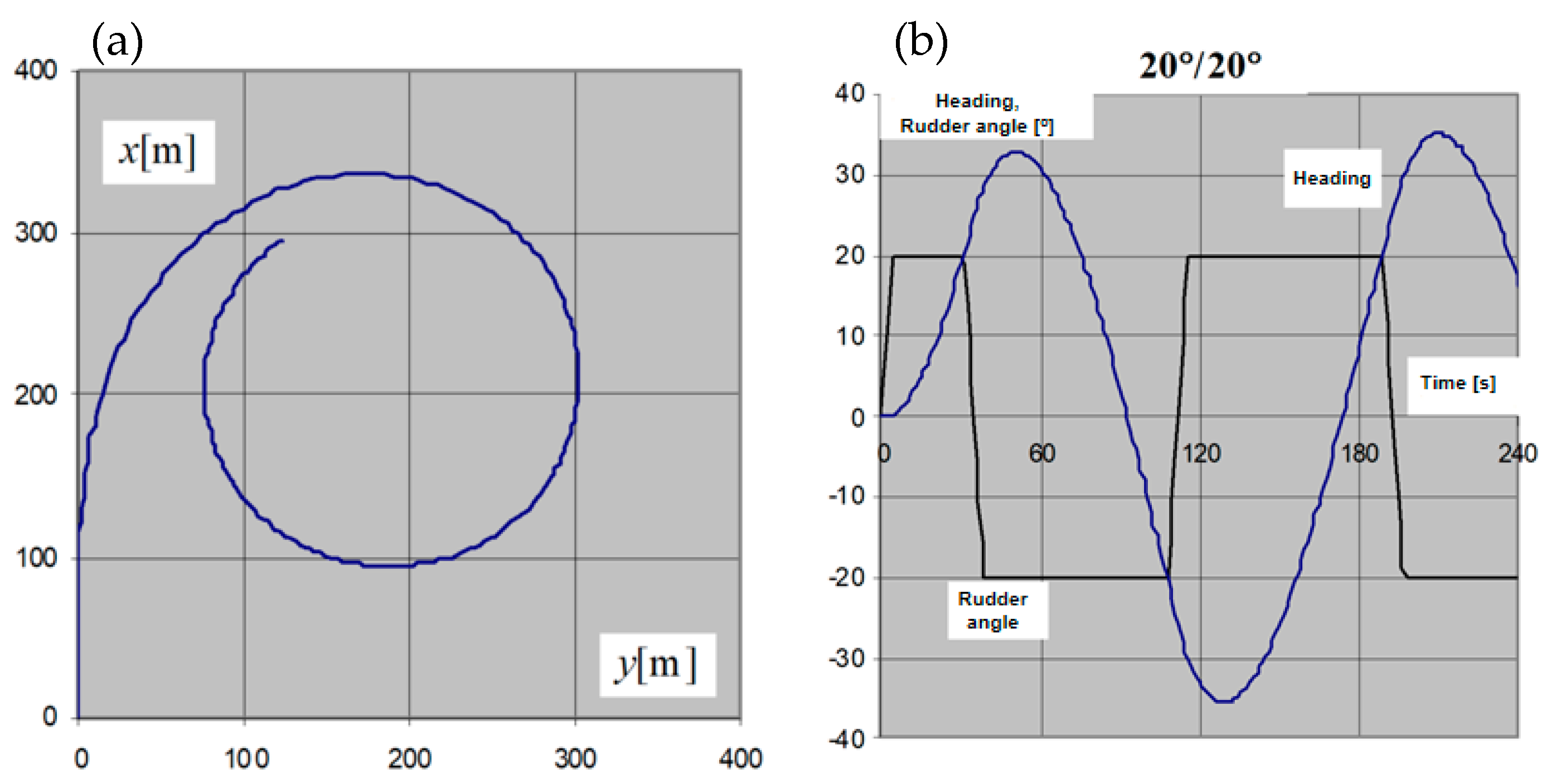
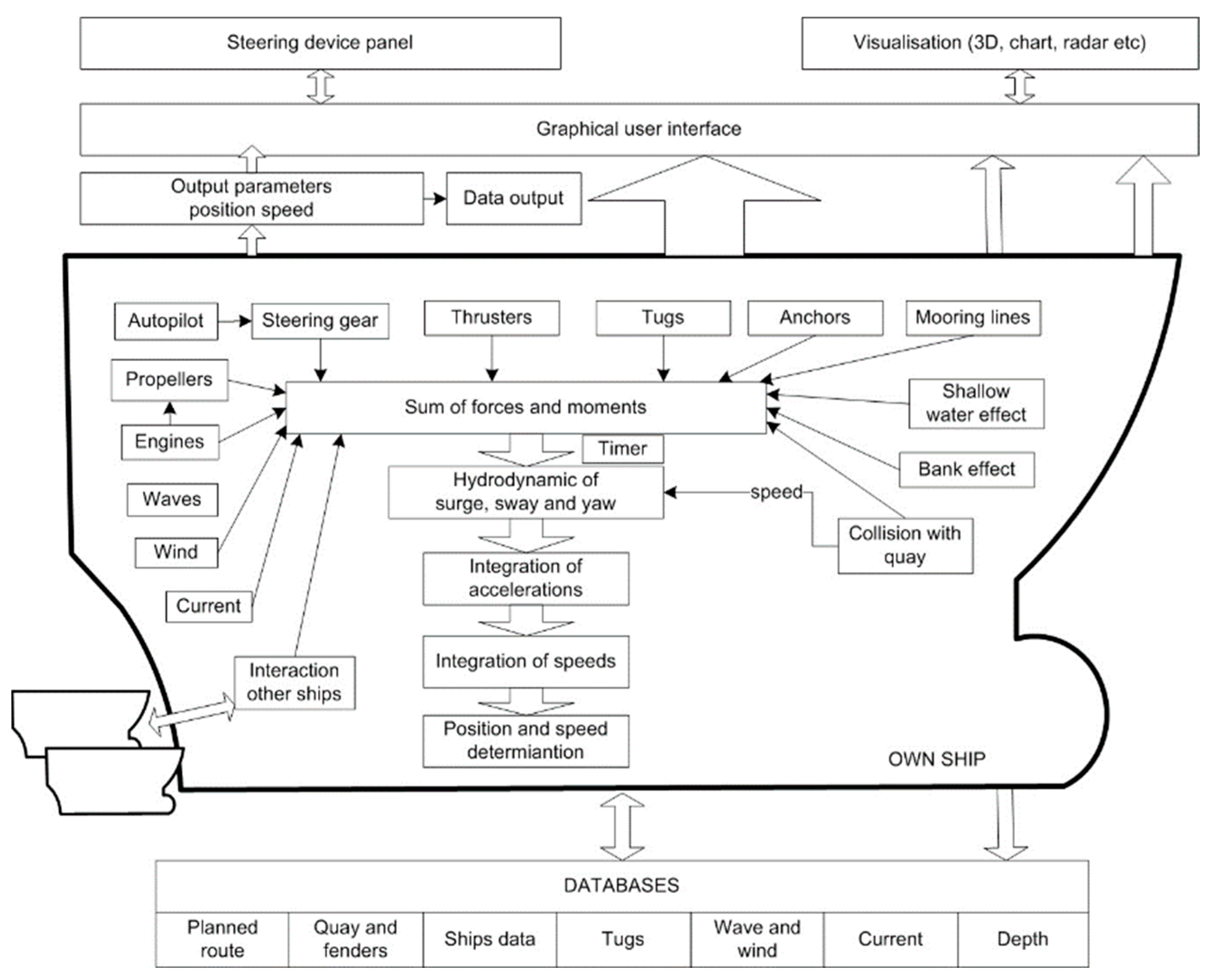
2.1. Selected Elements of Ship Mathematical Model Creation
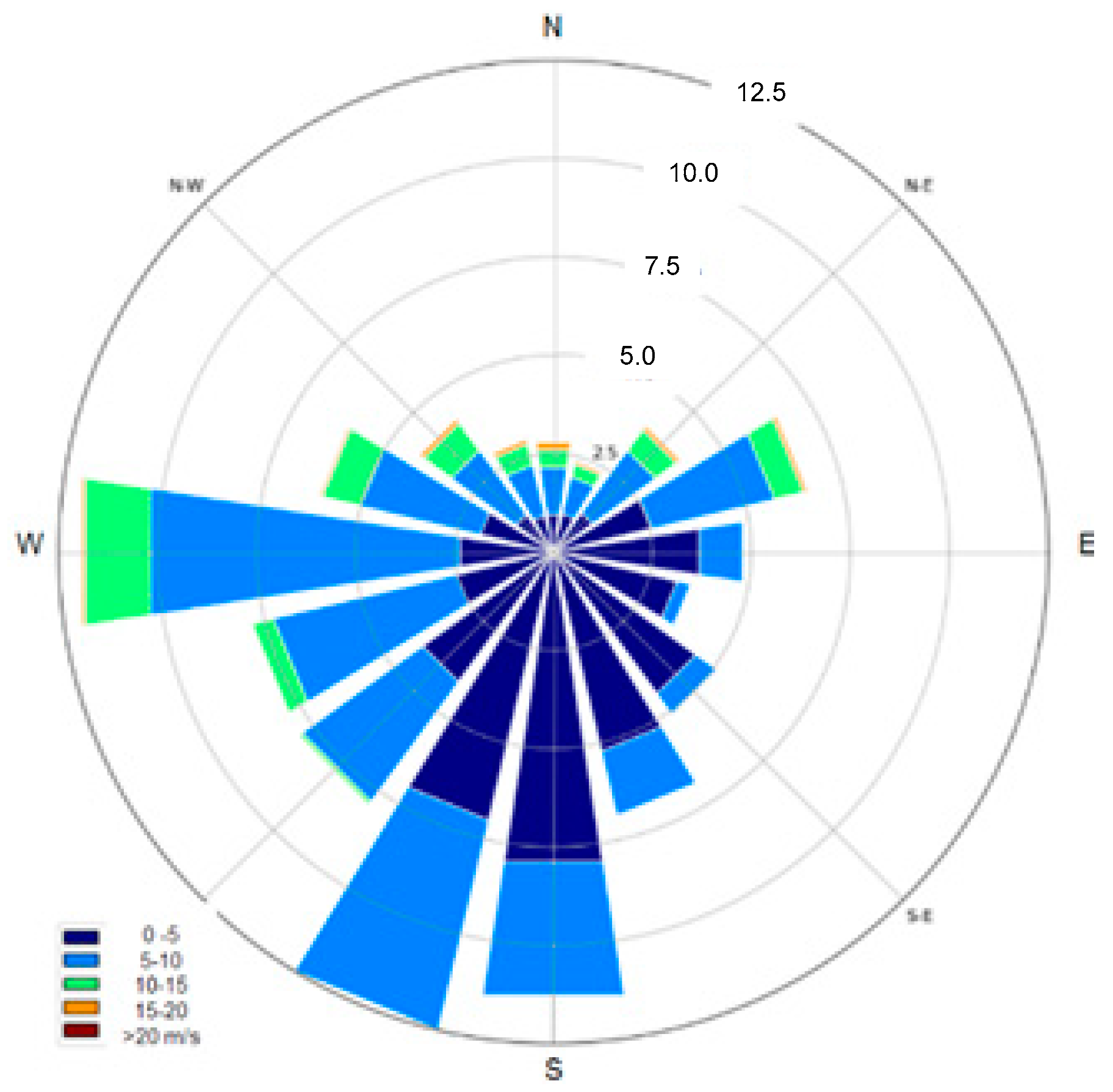
2.2. Selected Elements of Environment Modelling and Conditions Selection during Tests
2.3. The Detailed Sea Trials Performed and Their Conditions
- series 1, 2, and 3—entry to the port of general cargo vessel L = 133 m without rotation and mooring. The purpose is to determine the parameters of the approach waterway and the safety of entrance and mooring energy.
- series 4, 5 and 6—entry from the general cargo carrier port L = 133 m with rotation. The purpose is to define the parameters of the turning place, and waterways parameters during ship’s departure.
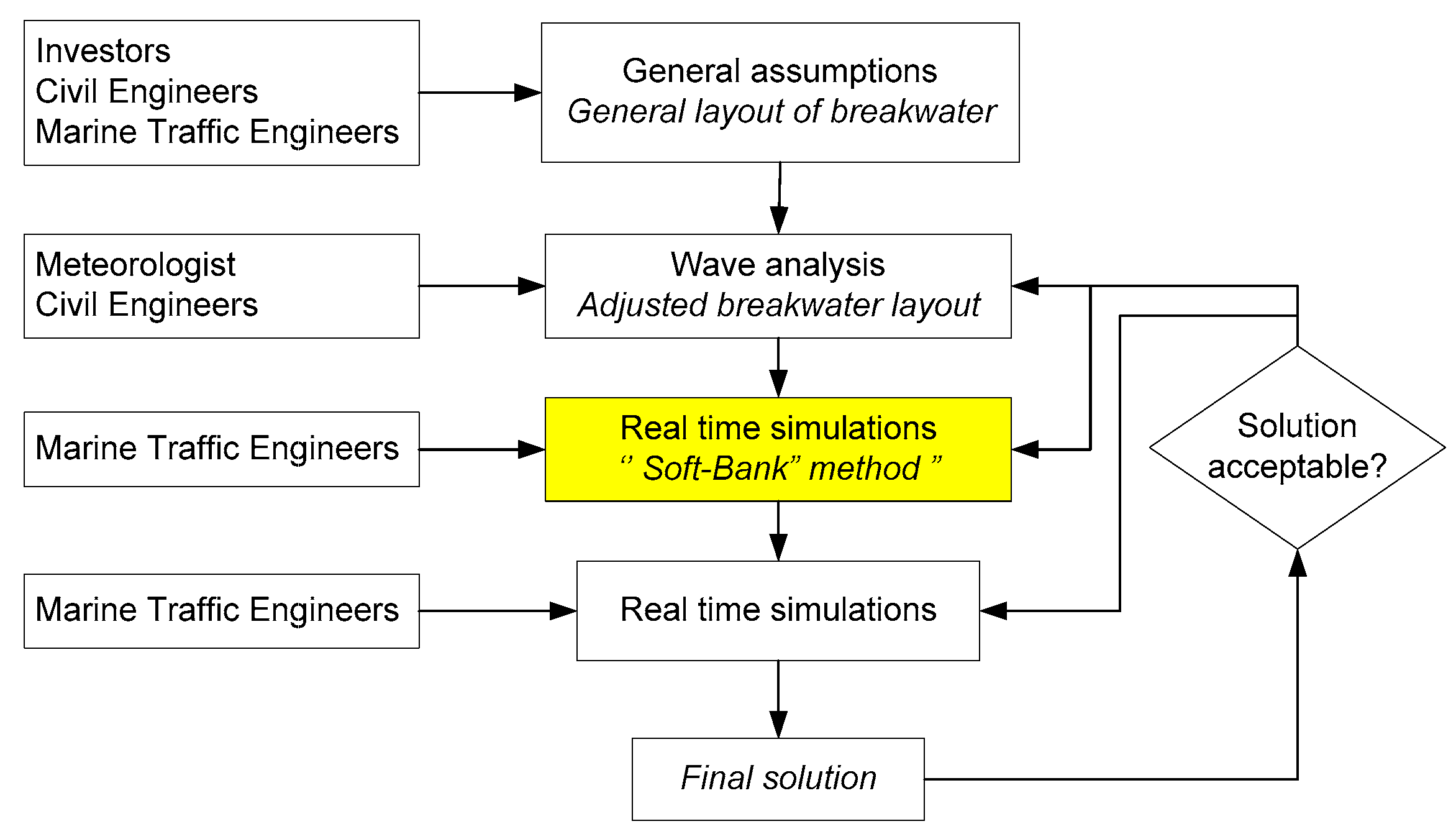
3. Methods
3.1. Proposed Method of Reducing Cost and Time of Simulation Analysis
- Determine design water depth considering ships draft and under-keel clearance (H = 9.0 m in the presented study);
- Design basic navigational aids with its minimum as possible number;
- Design the navigable area without simulated embankments so no interaction between the ship and embankments is simulated;
- Display the area layout on the electronic chart and inform the Captains performing the simulations that it is possible to passage the ship over the elements of infrastructure only in justified by environmental conditions cases;
- Execute simulations and analyse the results.
- Analytical methods like PIANC, ROM or Japanese;
- Statistical methods based on generalisation of simulation experiments;
- Fast Time Simulations (FTS) method.
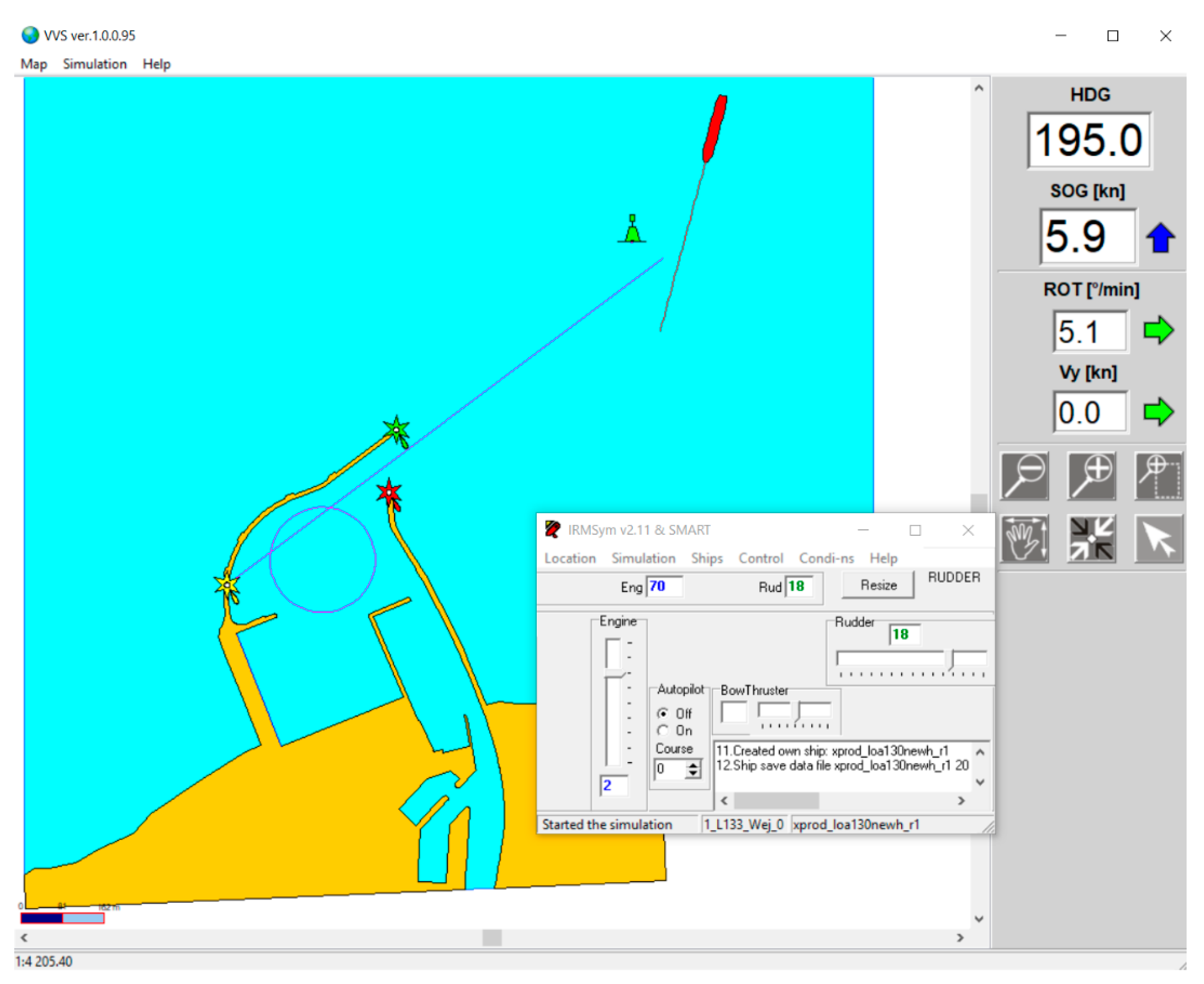
3.2. Real-Time Manoeuvring Simulation MethoD—Limited Task Simulator
3.3. Statistical Methods of Data Processing
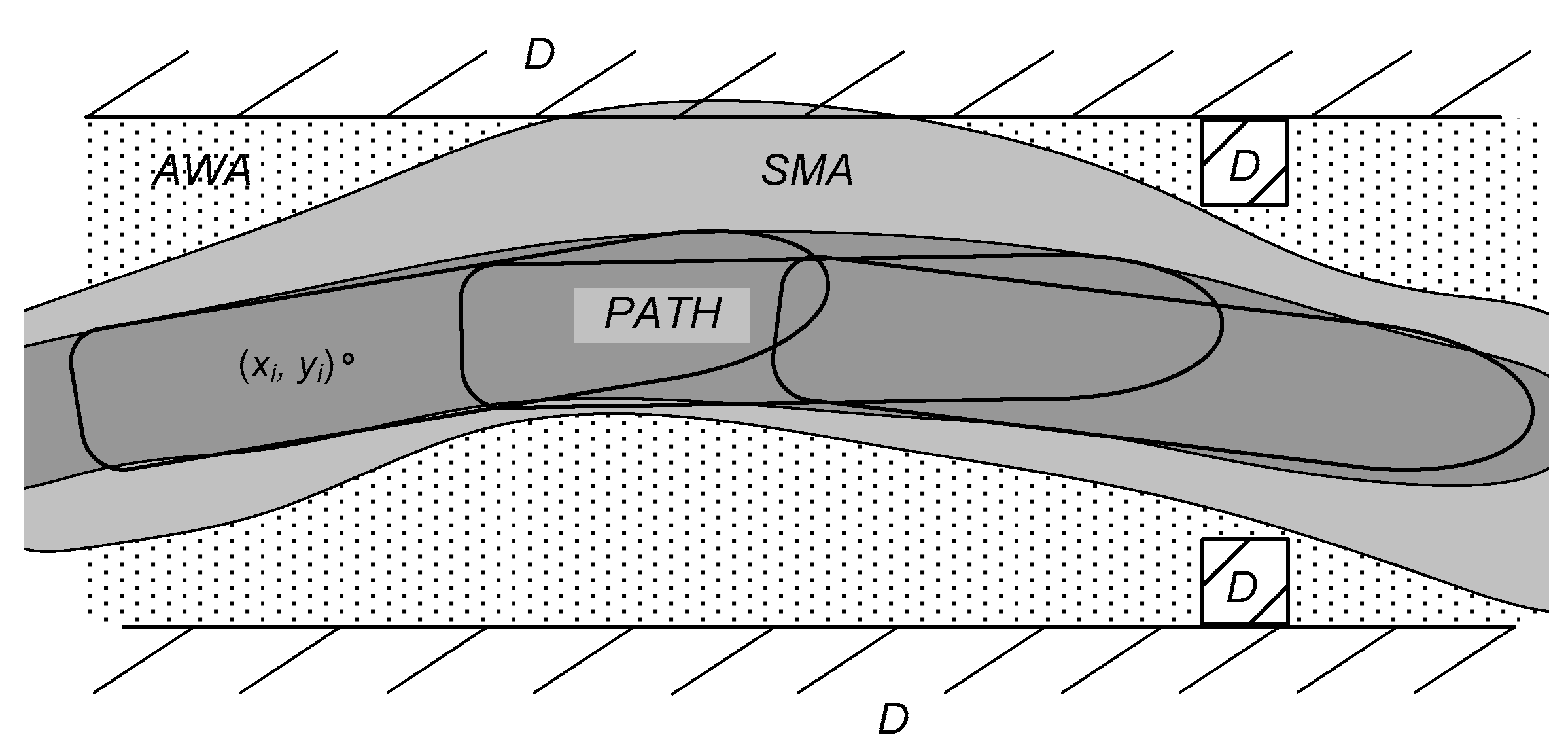
The Method of Simulation Result Data Processing
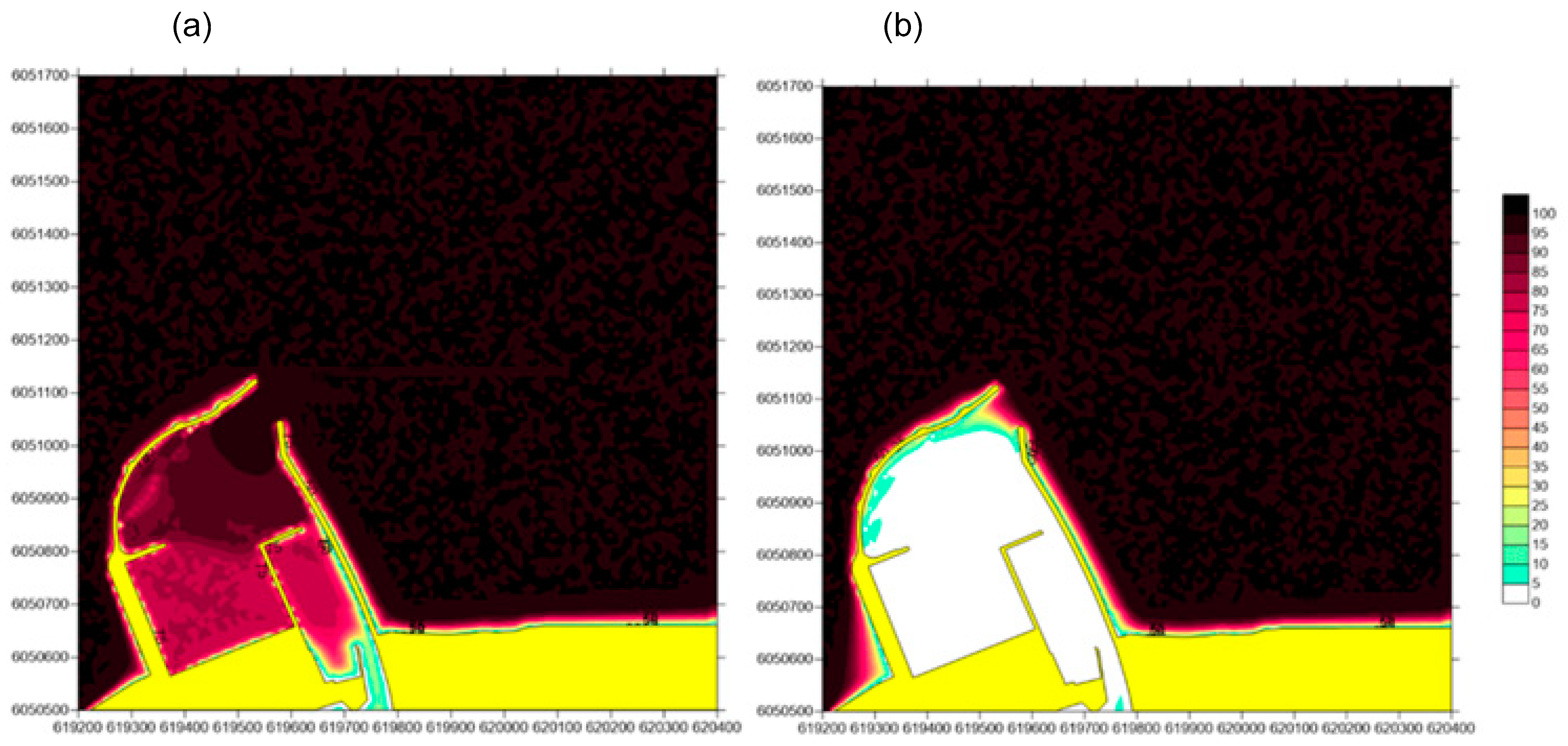
- Maximum waterway area needed for manoeuvring ships (extreme ships positions in all trials),
- Average waterway area needed for manoeuvring ships (defined as mean SMA),
- Waterway area on the given confidence level (defined as SMA on a given confidence level).
3.4. Conducting the Research
- Entrance and departure in no wind conditions (light conditions);
- Entrance to the port with wind NW 11 m/s (moderate condition);
- Entrance to the port with wind NW 17 m/s (severe condition);
- Departure and turning manoeuvre in no wind;
- Departure and turning manoeuvre with wind NW 11 m/s;
- Departure and turning manoeuvre with wind NE 11 m/s.
4. Results of Simulation Research and Discussion
- 95% is the Safe Manoeuvring Area (SMA) at a 95% level of confidence.
- Mean is the average waterway area.
- MAX is the maximal overbound area of all ships in series.
4.1. Comparison of Methods. Discussion
4.2. The Limitation of the “Soft-Bank” Method
- The bank effect cannot be taken into account;
- Limited possibility of taking into account the settlement of the vessel;
- Impossible to take into account an accident in the form of a stranding and collision with embankments or a moored vessel or another civil engineering technical object;
- The psychological impact on the navigator due to a false sense of safety due to not considering the ship’s collision possibility in simulation trials.
5. Conclusions
- Simulators are widely used tools and proper verification, especially of the simulation hydrodynamic model and hydrometeorological conditions models, should be carried out at the outset to match simulations to reality as closely as possible.
- The simulation method should be carried out by multiplying ship runs. The simulation studies based on a single or very small number of simulations without statistical data processing and experimental plan are questionable and do not present the proper value to port design needs.
- In any real-time simulation project, a very good link between pilots with good local knowledge for validation and provision of domain expertise should be established.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Maritime University of Szczecin. Navigational Analysis of Ustka Modernization; 2019; Unpublished. (In Polish) [Google Scholar]
- Perkovic, M.; Brcko, T.; Luin, B.; Vidmar, P. Ship Handling Challenges When Vessels are Outgrowing Ports. In Proceedings of the IMLA-INSLC, Cape Town, South Africa, 16 September 2016. [Google Scholar]
- Pianc MarCom WG 121: Harbour Approach Channels–Design Guidelines. Available online: https://www.pianc.org/publications/marcom/harbour-approach-channels-design-guidelines (accessed on 3 October 2020).
- Pianc MarCom WG 158: Masterplans for the Development of Existing Ports. Available online: https://www.pianc.org/publications/marcom/masterplans-for-the-development-of-existing-ports (accessed on 3 October 2020).
- ROM 3. 1-99: Recommendations for the Design of the Maritime Configuration of Ports, Approach Channels and Harbour Basins; Puertos del Estado: Madrid, Spain, 2007; ISBN 978-84-88975-39-3. [Google Scholar]
- IALA GUIDELINE 1058: Use of Simulation as a Tool for Waterway Design and Aids to Navigation Planning. Available online: https://www.iala-aism.org/product/use-of-simulation-as-a-tool-for-waterway-design-and-aids-to-navigation-planning-1058 (accessed on 3 October 2020).
- Vuylsteke, A. Scale Enlargement in the Flemish Port Area; Vlaanderen, 2016. [Google Scholar]
- Billington, C.J. Managing Risks in Ports. In Managing Risks in Shipping: A Practical Guide; The Nautical Institute: London, UK, 2001; pp. 57–69. [Google Scholar]
- Port Marine Safety Code. Available online: https://www.gov.uk/government/publications/port-marine-safety-code (accessed on 3 October 2020).
- Gucma, S.; Przywarty, M.; Dzwonkowski, J.; Bilewski, M. Dimensioning of Fairway Bends—Kinematic Method of Numerical Simulation. J. Mar. Sci. Eng. 2020, 8, 138. [Google Scholar] [CrossRef]
- Vidmar, P.; Perkovič, M.; Gucma, L.; Łazuga, K. Risk Assessment of Moored and Passing Ships. Appl. Sci. 2020, 10, 6825. [Google Scholar] [CrossRef]
- Pianc MarCom WG 117: Use of Hydro/Meteo Information for Port Access and Operations (2012). Available online: https://www.pianc.org/publications/marcom/use-of-hydro-meteo-information-for-port-access-and-operations (accessed on 3 October 2020).
- McCartney, B.L. (Ed.) Ship Channel Design and Operation; ASCE manuals and reports on engineering practice; American Society of Civil Engineers: Reston, VA, USA, 2005; ISBN 978-0-7844-0770-7. [Google Scholar]
- Ligterngen, H.; Velsink, H. Port and Terminals; VSSD: Kanpur, India, 2012. [Google Scholar]
- Carl, A. Thoresen Port Designers Handbook, 3rd ed.; ICE Publishing: London, UK, 2014; ISBN 978-0-7277-6004-3. [Google Scholar]
- Gucma, L.; Łazuga, K. The Support of Port Regulation Creation and Update by Real-Time Ship Manoeuvring Simulation Studies Exampled by Port of Kołobrzeg. Trans Nav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13. [Google Scholar] [CrossRef]
- Iribarren, J.R. PIANC Bulletin No. 100; PIANC: Bruxelles, Belgium, 1999. [Google Scholar]
- William, C. Webster Shiphandling Simulation: Application to Waterway Design; National Academies Press: Washington, DC, USA, 1992; p. 2015. ISBN 978-0-309-04338-0. [Google Scholar]
- Permanent International Association of Navigation Congresses; Permanent Technical Committee II; Working Group No. 20. Capability of Ship Manoeuvring Simulation Models for Approach Channels and Fairways in Harbours: Report of Working Group No. 20 of Permanent Technical Committee II; General Secretariat of PIANC: Brussels, Belgium, 1992; ISBN 978-2-87223-040-2. [Google Scholar]
- Benedict, K.; Baldauf, M.; Felsenstein, C.; Kirchhoff, M. Computer-Based Support for the Evaluation of Ship Handling Exercise Results. WMU J. Marit. Aff. 2006, 5, 17–35. [Google Scholar] [CrossRef]
- Benedict, K.; Kirchhoff, M.; Gluch, M.; Fischer, S.; Baldauf, M. Manoeuvring Simulation on the Bridge for Predicting Motion of Real Ships and as Training Tool in Ship Handling Simulators. Int. J. Mar. Navig. Saf. Sea Transp. 2009, 3, 25–30. [Google Scholar]
- Zhang, W. Assessing the Competency of Seafarers Using Simulators in Bridge Resource Management (BRM) Training. Dissertation Thesis, World Maritime University, Malmo, Sweden, 11 May 2017. [Google Scholar]
- Sariöz, K.; Narli, E. Assessment of Manoeuvring Performance of Large Tankers in Restricted Waterways: A Real-Time Simulation Approach. Ocean Eng. 2003, 30, 1535–1551. [Google Scholar] [CrossRef]
- Eloot, K.; Verwilligen, J.; Vantorre, M. A Methodology for Evaluating the Controllability of a Ship Navigating in a Restricted Channel. Arch. Civil Mech. Eng. 2007, 7, 91–104. [Google Scholar] [CrossRef]
- Lataire, E.; Vantorre, M.; Delefortrie, G. The influence of the ship’s speed and distance to an arbitrarily shaped bank on bank effects. ASME 2015. [Google Scholar] [CrossRef]
- Cross, S.J.; Olofsson, M. Classification of maritime simulators, the final attempt introducing dnv’s new standard. In Proceedings of the International Conference on Marine Simulation and Ship Manoeuvrability 2000 (MARSIM 2000), Orlando, FL, USA, 8–12 May 2000; p. 7. [Google Scholar]
- Donatini, L.; Vantorre, M.; Verwilligen, J.; Delefortrie, G. Description of Hydro/Meteo Data in Ship Manoeuvring Simulators: A Survey on the State of the Art. Ocean Eng. 2019, 189, 106344. [Google Scholar] [CrossRef]
- Nam-Kyun, I.; Van-Luong, T. Ship’s Maneuverability in Strong Wind. J. Navig. Port Res. Int. Ed. 2008, 32, 115–120. [Google Scholar]
- Cieutat, J.M.; Gonzato, J.C.; Guitton, P. A New Efficient Wave Model for Maritime Training Simulator. In Proceedings of the Proceedings Spring Conference on Computer Graphics, Budmerice, Slovakia, 25–28 April 2001; pp. 202–209. [Google Scholar]
- Artyszuk, J. A Uniform Current in Ship Manoeuvring Mathematical Model. Annu. Navig. 2004, 8, 67–76. [Google Scholar]
- Vantorre, M.; Delefortrie, G.; Laforce, E.; Vlieger, H.D.; Claeys, S. Ship Manoeuvring at Very Small and Negative Under Keel Clearance. IFAC Proc. Vol. 2003, 36, 37–42. [Google Scholar] [CrossRef]
- Benedict, K.; Kirchhoff, M.; Fischer, S.; Gluch, M.; Klaes, S.; Baldauf, M. Application of Fast Time Simulation Technologies for Enhanced Ship Manoeuvring Operation. IFAC Proc. Vol. 2010, 43, 79–84. [Google Scholar] [CrossRef]
- Artyszuk, J. A Novel Method of Ship Manoeuvring Model Identification from Sea Trials. Annu. Navig. 2003, 6, 19–35. [Google Scholar]
- World Meteorological Organization. Guidelines on Ensemble Prediction Systems and Forecasting; WMO: Geneva, Switzerland, 2012; ISBN 978-92-63-11091-6. [Google Scholar]
- Molteni, F.; Buizza, R.; Palmer, T.N.; Petroliagis, T. The ECMWF Ensemble Prediction System: Methodology and Validation. Q.J. Royal Met. Soc. 1996, 122, 73–119. [Google Scholar] [CrossRef]
- Mel, R.; Lionello, P. Storm Surge Ensemble Prediction for the City of Venice. Weather Forecast. 2014, 29, 1044–1057. [Google Scholar] [CrossRef]
- Mel, R.; Viero, D.P.; Carniello, L.; Defina, A.; D’Alpaos, L. Simplified Methods for Real-Time Prediction of Storm Surge Uncertainty: The City of Venice Case Study. Adv. Water Resour. 2014, 71, 177–185. [Google Scholar] [CrossRef]
- Technical Standards and Commentaries of Port and Harbour Facilities in Japan. Japan Port and Harbour Association 1999 Translated by the Overseas Coastal Area Development Institute of Japan in 2002. Jpn. Port Harb. Assoc. 2002, 1, 455–473.
- Perkovic, M.; Gucma, L.; Przywarty, M.; Gucma, M.; Petelin, S.; Vidmar, P. Nautical Risk Assessment for LNG Operations at the Port of Koper. SV-JME 2012, 58, 607–613. [Google Scholar] [CrossRef]
- Gucma, L. Zarządzanie Ryzykiem w Rejonie Mostów Usytuowanych Nad Drogami Wodnymi w Aspekcie Zderzenia z Jednostkami Pływającymi. (Risk Management in the Area of Bridges Situated on Waterways in Respect to Ships Collisions); Scientific Publications of Maritime University of Szczecin: Szczecin, Poland, 2012; ISBN 978-838-990-70-5. [Google Scholar]
- Artyszuk, J. Towards a Scaled Manoeuvring Mathematical Model for a Ship of Arbitrary Size. Zesz. Nauk. Akad. Morska Szczec. 2005, 78, 21–37. [Google Scholar]
- Kobyliński, L. Capabilities of Ship Handling Simulators to Simulate Shallow Water, Bank and Canal Effects. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2011, 5, 247–252. [Google Scholar]
- Iribarren, J.R. Determining the Horizontal Dimensions of Ship Manoeuvring Areas. Bull. Perm. Int. Assoc. Navig. Congr. 1999, 100, 5–26. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name of File | Manoeuvre | Initial Speed (kn) | Wind Speed (m/s) | Wave on the Approach (m) | No. of Trials |
|---|---|---|---|---|---|---|
| 1 | 1_L133_Wej_0 | Entry into port and mooring on the starboard side | 6 | no | no | 15 |
| 2 | 2_L133_Wej_NW11 | as above | 6 | NW 11 | 0.9 | 15 |
| 3 | 3_L133_Wej_NW17 | as above | 6 | NW 17 | 1.6 | 15 |
| 4 | 4_L133_Wyj_0 | Unmooring, turning and leaving port | 0 | no | no | 15 |
| 5 | 5_L133_Wyj_NW11 | as above | 0 | NW 11 | 0.9 | 15 |
| 6 | 6_L133_Wyj_NE11 | as above | 0 | NE 11 | 0.9 | 15 |
| No | Methods | Case | Channel Widths | |
|---|---|---|---|---|
| Moderate | Severe | |||
| 3 | Simulations | Mean | 30 | 33 |
| 95% confident | 83 | 80 | ||
| Max | 79 | 75 | ||
| 1 | PIANC | 60 m (3.0 B) | 70 m (3.5 B) | |
| 2 | Japanese (OCDI 2009) | 55.6 m (2.8 B) | NA | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Łazuga, K.; Quý, N.M.; Gucma, L. Cost-Effective Design of Port Approaches Using Simulation Methods Based on the Example of a Modernized Port in the Ustka. J. Mar. Sci. Eng. 2021, 9, 211. https://doi.org/10.3390/jmse9020211
Łazuga K, Quý NM, Gucma L. Cost-Effective Design of Port Approaches Using Simulation Methods Based on the Example of a Modernized Port in the Ustka. Journal of Marine Science and Engineering. 2021; 9(2):211. https://doi.org/10.3390/jmse9020211
Chicago/Turabian StyleŁazuga, Kinga, Nguyễn Minh Quý, and Lucjan Gucma. 2021. "Cost-Effective Design of Port Approaches Using Simulation Methods Based on the Example of a Modernized Port in the Ustka" Journal of Marine Science and Engineering 9, no. 2: 211. https://doi.org/10.3390/jmse9020211
APA StyleŁazuga, K., Quý, N. M., & Gucma, L. (2021). Cost-Effective Design of Port Approaches Using Simulation Methods Based on the Example of a Modernized Port in the Ustka. Journal of Marine Science and Engineering, 9(2), 211. https://doi.org/10.3390/jmse9020211