
Evaluation of PNT Error Limits Using Real World Close Encounters from AIS Data


Abstract
1. Introduction
1.1. PNT Data as Study Subject
1.2. Study Approach
2. AIS-Based Determination of Real-World Situations
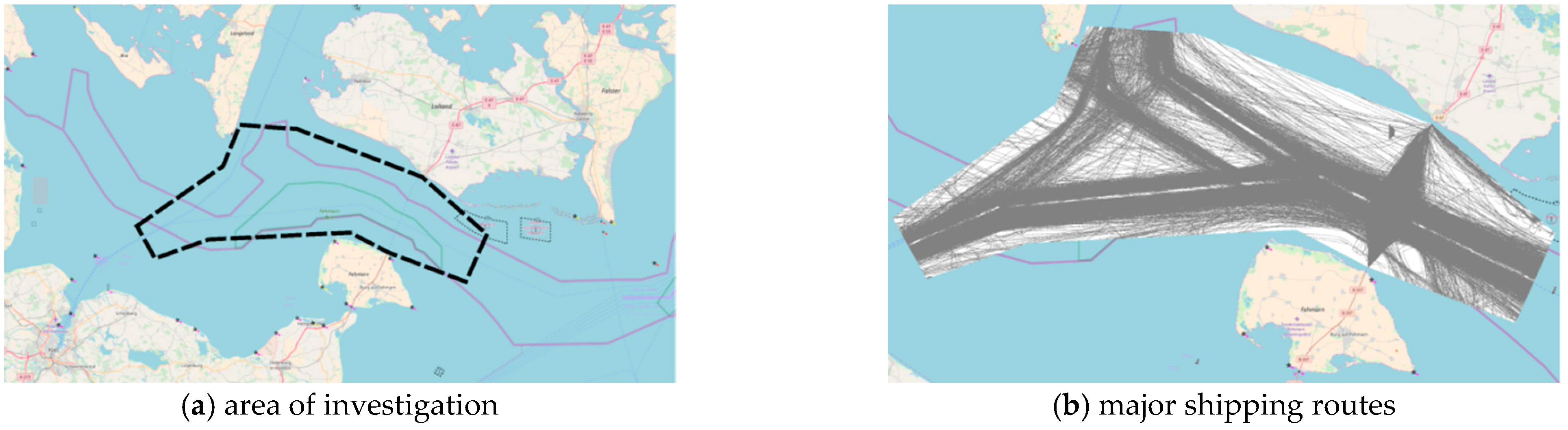
2.1. Database
2.2. Incident Detection Method
2.3. Detected Encounters
3. Methodology
3.1. Background
3.2. Modelling
3.3. Mathematical Formulation
4. Study Results
4.1. Conditions for Critical Misinterpretation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) Position error only | |
| (b) SOG error only | |
| (c) COG error only | |
4.2. Position Error
4.3. SOG Inaccuracies
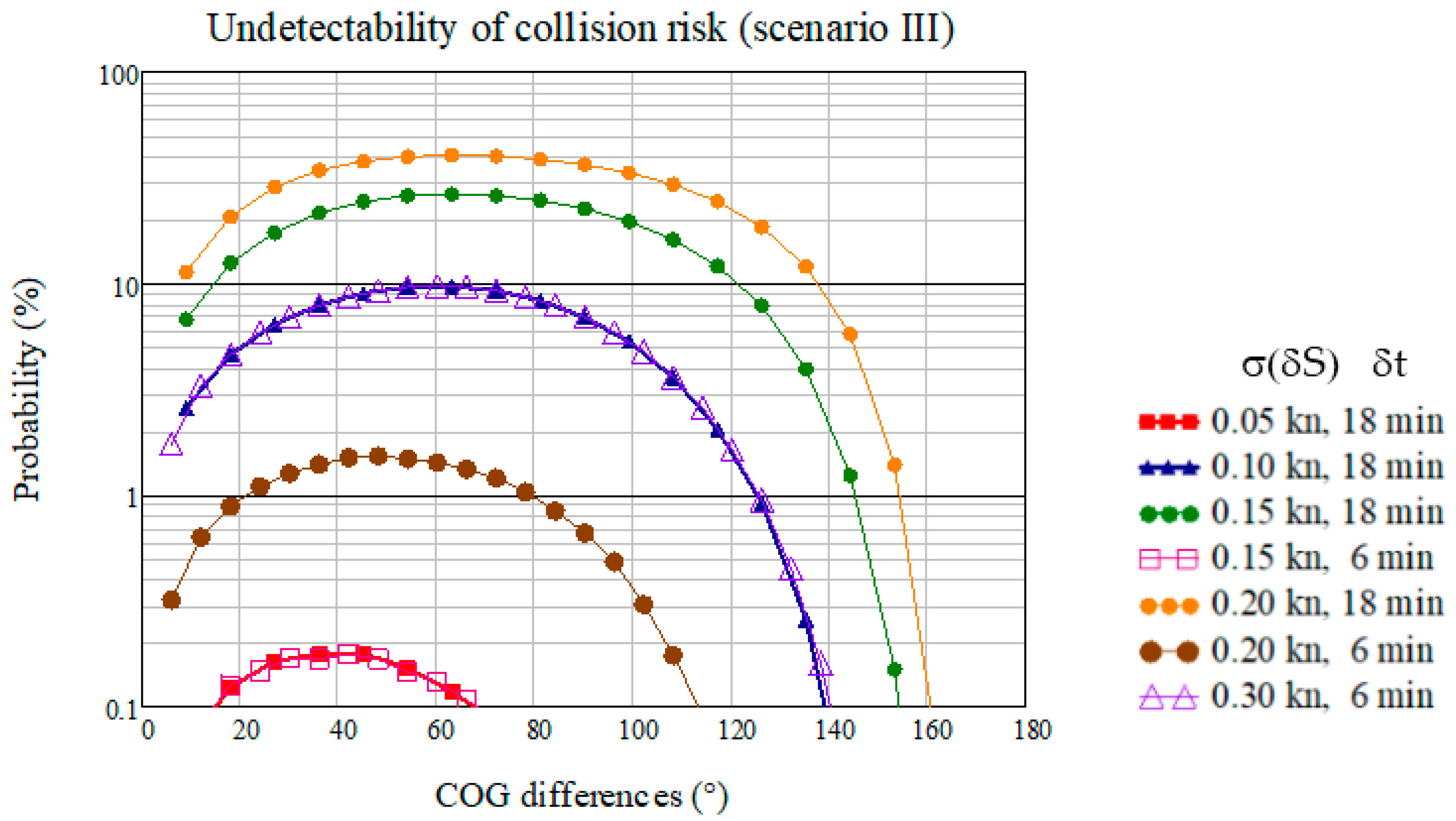
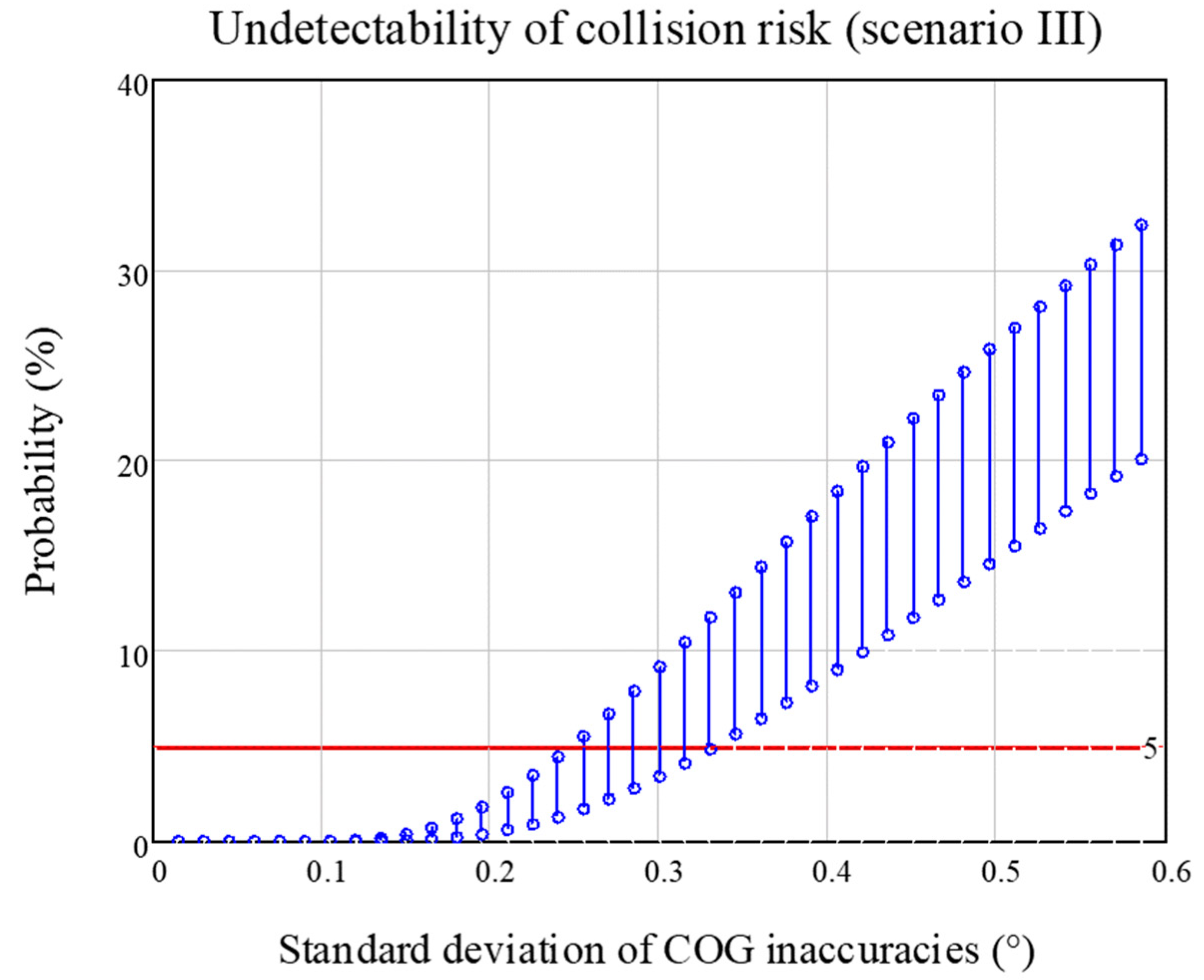
4.4. COG Inaccuracies
4.5. Combination of SOG and COG Inaccuracies
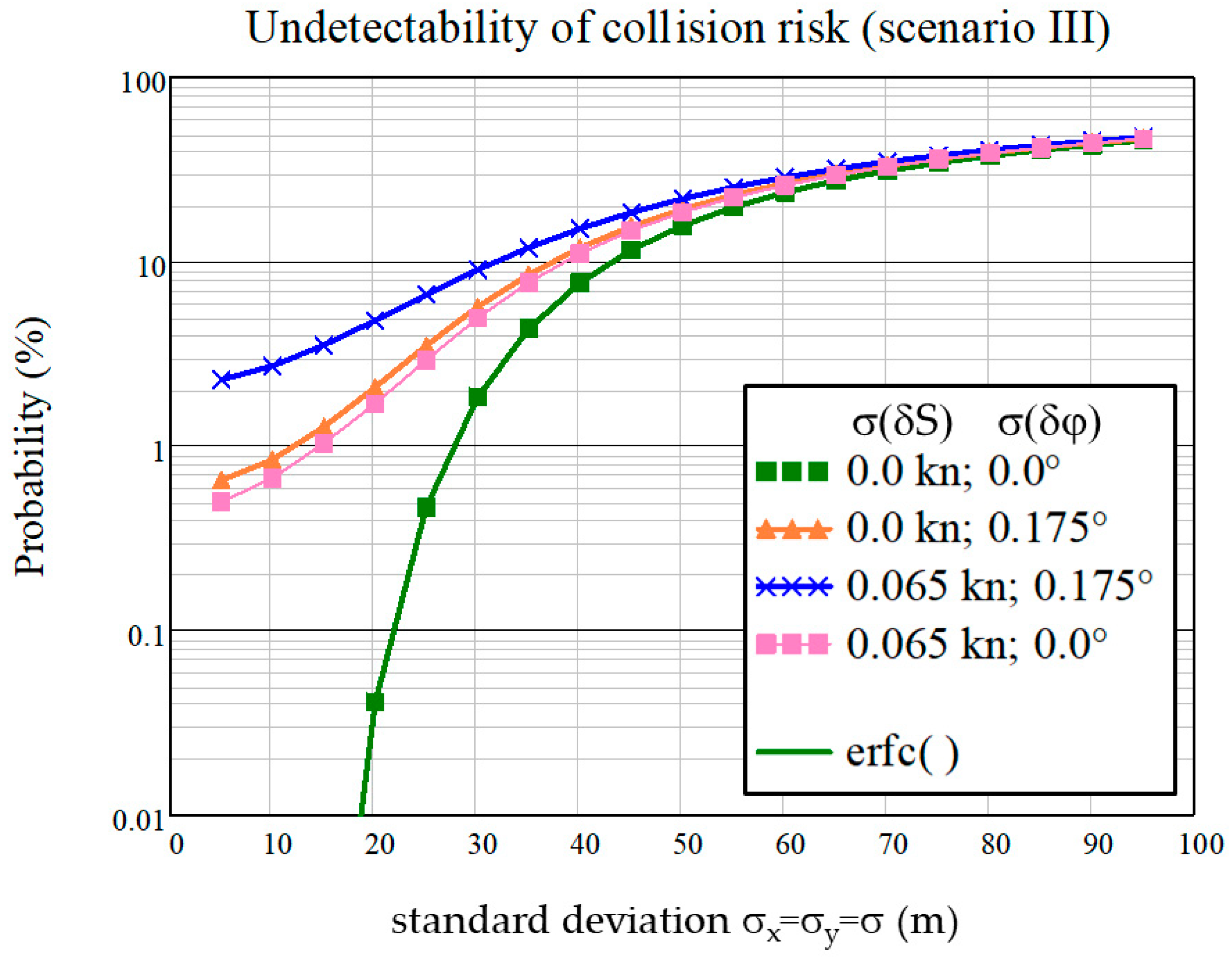
4.6. Position, SOG and COG Inaccuracies
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, Q.; Wang, N. A Survey on Ship Collision Risk Evaluation. Traffic Transp. 2014, 26, 475–486. [Google Scholar] [CrossRef]
- Pietrzykowski, Z. Ship’s Fuzzy Domain—A Criterion for Navigational Safety in Narrow Fairways. J. Navig. 2008, 61, 499–514. [Google Scholar] [CrossRef]
- Goerlandt, F.; Montewka, J.; Lammi, H.; Kujala, P. Analysis of near collisions in the Gulf of Finland. In Advances in Safety, Reliability and Risk Management; CRC Press: Boca Raton, FL, USA, 2011; pp. 2880–2886. [Google Scholar]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship Collision Avoidance and COLREGS Compliance Using Simulation-Based Control Behavior Selection with Predictive Hazard Assessment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3407–3422. [Google Scholar] [CrossRef]
- Baldauf, M.; Mehdi, R.; Deeb, H.; Schröder-Hinrichs, J.U.; Benedict, K.; Krüger, C.; Fischer, S.; Gluch, M. Manoeuvring areas to adapt ACAS for the maritime domain. Sci. J. Marit. Univ. Szczec. 2015, 43, 39–47. [Google Scholar] [CrossRef]
- Baldauf, M.; Benedict, K.; Fischer, S.; Motz, F.; Schröder-Hinrichs, J.-U. Collision avoidance systems in air and maritime traffic. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2011, 225, 333–343. [Google Scholar] [CrossRef]
- Mehdi, R.A.; Baldauf, M.; Deeb, H. A dynamic risk assessment method to address safety of navigation concerns around offshore renewable energy installations. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2020, 234, 231–244. [Google Scholar] [CrossRef]
- IMO. Report of the Maritime Safety Committee, Strategy for the Development and Implementation of E-Navigation, MSC\85\26, Annex 20; International Maritime Organization: London, UK, 2009. [Google Scholar]
- IMO. NCSR1 Report to the Maritime Safety Committee: Draft E-Navigation Strategy Implementation Plan. NCSR1/28 Annex 7; International Maritime Organization: London, UK, 2014. [Google Scholar]
- IMO. Performance Standards for Multi-System Shipborne Radionavigation Receivers. MSC 95/22/Add.2 Annex17; International Maritime Organization: London, UK, 2014. [Google Scholar]
- IMO. Guidelines for Shipborne Position, Navigation and Timing (Pnt) Data Processing. MSC.1/Circ.1575; International Maritime Organization: London, UK, 2017. [Google Scholar]
- IMO. Revised Maritime Policy and Requirements for a Future Global Navigation Satellite System (GNSS), Resolution A.915(22); International Maritime Organization: London, UK, 2001. [Google Scholar]
- Banyś, P.; Engler, E.; Heymann, F. Interdependencies Between Evaluation of Collision Risks and Performance of Shipborne Pnt Data Provision. Transp. Probl. 2017, 11, 151–165. [Google Scholar] [CrossRef][Green Version]
- Fujii, Y.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Goodwin, E.M. A Statistical Study of Ship Domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef]
- Davis, P.V.; Dove, M.J.; Stockel, C.T. A Computer Simulation of Marine Traffic Using Domains and Arenas. J. Navig. 1980, 33, 215–222. [Google Scholar] [CrossRef]
- Wang, T.; Yan, X.P.; Wang, Y.; Wu, Q. Ship Domain Model for Multi-ship Collision Avoidance Decision-making with COLREGs Based on Artificial Potential Field. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 85–92. [Google Scholar] [CrossRef]
- Ning, W.; Xianyao, M.; Qingyang, X.; Zuwen, W. A Unified Analytical Framework for Ship Domains. J. Navig. 2009, 62, 643–655. [Google Scholar] [CrossRef]
- Hilgert, H.; Baldauf, M. A common risk model for the assessment of encounter situations on board ships. Dtsch. Hydrogr. Z. 1997, 49, 531–542. [Google Scholar] [CrossRef]
- Dinh, G.H.; Im, N. The combination of analytical and statistical method to define polygonal ship domain and reflect human experiences in estimating dangerous area. Int. J. e-Navig. Marit. Econ. 2016, 4, 97–108. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. Review of ship safety domains: Models and applications. Ocean Eng. 2017, 145, 277–289. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. A method of determining and visualizing safe motion parameters of a ship navigating in restricted waters. Ocean Eng. 2017, 129, 363–373. [Google Scholar] [CrossRef]
- Szlapczynska, J.; Szlapczynski, R. Heuristic Method of Safe Manoeuvre Selection Based on Collision Threat Parameters Areas. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 591–596. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Krata, P.; Szlapczynska, J. Ship domain applied to determining distances for collision avoidance manoeuvres in give-way situations. Ocean Eng. 2018, 165, 43–54. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Krata, P. Determining and visualizing safe motion parameters of a ship navigating in severe weather conditions. Ocean Eng. 2018, 158, 263–274. [Google Scholar] [CrossRef]
- Ożoga, B.; Montewka, J. Towards a decision support system for maritime navigation on heavily trafficked basins. Ocean Eng. 2018, 159, 88–97. [Google Scholar] [CrossRef]
- Kondo, M.; Shoji, R.; Miyake, K.; Zhang, T.; Furuya, T.; Ohshima, K.; Inaishi, M.; Nakagawa, M. The “Watch” Support System for Ship Navigation. In Mining Data for Financial Applications; Springer Nature: London, UK, 2018; Volume 10905, pp. 429–440. [Google Scholar]
- Gil, M.; Montewka, J.; Krata, P.; Hinz, T.; Hirdaris, S. Determination of the dynamic critical maneuvering area in an encounter between two vessels: Operation with negligible environmental disruption. Ocean Eng. 2020, 213, 107709. [Google Scholar] [CrossRef]
- Gil, M.; Montewka, J.; Krata, P.; Hinz, T.; Hirdaris, S. Semi-dynamic ship domain in the encounter situation of two vessels. In Developments in the Collision and Grounding of Ships and Offshore Structures; CRC Press: Boca Raton, FL, USA, 2019; pp. 301–307. [Google Scholar]
- Baldauf, M.; Mehdi, R.; Fischer, S.; Gluch, M. A perfect warning to avoid collisions at sea? Sci. J. Marit. Univ. Szczec. 2017, 49, 53–64. [Google Scholar] [CrossRef]
- Van Westrenen, F.; Baldauf, M. Improving conflicts detection in maritime traffic: Case studies on the effect of traffic complexity on ship collisions. Proc. Inst. Mech. Eng. Part M: J. Eng. Marit. Environ. 2019, 234, 209–222. [Google Scholar] [CrossRef]
- IMO. Resolution A.824(19) Performance standards for devices to indicate speed and distance (MSC.96(72)); International Maritime Organization: London, UK, 1997. [Google Scholar]
- Qu, X.; Meng, Q.; Suyi, L. Ship collision risk assessment for the Singapore Strait. Accid. Anal. Prev. 2011, 43, 2030–2036. [Google Scholar] [CrossRef] [PubMed]
- Bakdi, A.; Glad, I.; Vanem, E.; Engelhardtsen, Ø. AIS-Based Multiple Vessel Collision and Grounding Risk Identification based on Adaptive Safety Domain. J. Mar. Sci. Eng. 2019, 8, 5. [Google Scholar] [CrossRef]
- Li, M.; Mou, J.; Liu, R.; Chen, P.; Dong, Z.; He, Y. Relational Model of Accidents and Vessel Traffic Using AIS Data and GIS: A Case Study of the Western Port of Shenzhen City. J. Mar. Sci. Eng. 2019, 7, 163. [Google Scholar] [CrossRef]
- Lenart, A.S. Manoeuvring to Required Approach Parameters—CPA Distance and Time. In Annual of Navigation; Polish Academy of Sciences, Polish Navigation Forum: Gdynia, Poland, 1999; pp. 99–108. [Google Scholar]
- Lenart, A.S. Manoeuvring to Required Approach Parameters—Distance and Time on Course. In Annual of Navigation; Polish Academy of Sciences, Polish Navigation Forum: Gdynia, Poland, 1999; pp. 109–115. [Google Scholar]
- Lenart, A. Approach Parameters in Marine Navigation—Graphical Interpretations. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 521–529. [Google Scholar] [CrossRef]
- Szlapczynski, R. A Unified Measure of Collision Risk Derived from the Concept of a Ship Domain. J. Navig. 2006, 59, 477–490. [Google Scholar] [CrossRef]
- Bole, A.; Wall, A.D.; Norris, A. Radar and ARPA Manual: Radar, AIS and Target Tracking for Marine Radar, 3rd ed.; Butterworth-Heinemann: Oxford, UK, 2014. [Google Scholar]
- IMO. Resolution A.424(XI), Performance Standards for Gyro-Compasses; International Maritime Organization: London, UK, 1979. [Google Scholar]
- IMO. Resolution A.1046(27) Worldwide Radionavigation System; International Maritime Organization: London, UK, 2011. [Google Scholar]
- IMO. Resolution A.823(19), Performance Standards for Automatic Radar Plotting Aids (Arpas); International Maritime Organization: London, UK, 1995. [Google Scholar]














| δCOG (°) | 0.1 | 0.2 | ||||||
|---|---|---|---|---|---|---|---|---|
| δSOG (kn) | 0.05 | 0.10 | 0.15 | 0.01 | 0.05 | 0.10 | 0.15 | |
| δt (min) | ||||||||
| 18 | 0.4 | 10.8 | 27.4 | 2.1 | 2.30 | 13.6 | 29.2 | |
| 12 | 0.0 | 1.8 | 10.2 | 0.16 | 0.17 | 2.70 | 11.6 | |
| 6 | 0.0 | 0.0 | 0.20 | 0.0 | 0.0 | 0.0 | 0.26 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Engler, E.; Banyś, P.; Engler, H.-G.; Baldauf, M.; Torres, F.S. Evaluation of PNT Error Limits Using Real World Close Encounters from AIS Data. J. Mar. Sci. Eng. 2021, 9, 149. https://doi.org/10.3390/jmse9020149
Engler E, Banyś P, Engler H-G, Baldauf M, Torres FS. Evaluation of PNT Error Limits Using Real World Close Encounters from AIS Data. Journal of Marine Science and Engineering. 2021; 9(2):149. https://doi.org/10.3390/jmse9020149
Chicago/Turabian StyleEngler, Evelin, Paweł Banyś, Hans-Georg Engler, Michael Baldauf, and Frank Sill Torres. 2021. "Evaluation of PNT Error Limits Using Real World Close Encounters from AIS Data" Journal of Marine Science and Engineering 9, no. 2: 149. https://doi.org/10.3390/jmse9020149
APA StyleEngler, E., Banyś, P., Engler, H.-G., Baldauf, M., & Torres, F. S. (2021). Evaluation of PNT Error Limits Using Real World Close Encounters from AIS Data. Journal of Marine Science and Engineering, 9(2), 149. https://doi.org/10.3390/jmse9020149