
Time Delay Optimization of Compressing Shipborne Radar Digital Video Based on Deep Learning


Abstract
:1. Introduction
- Based on the characteristics and application scenarios of shipborne radar digital video images, this study developed an algorithm to rapidly encode shipborne radar digital video by combining the algorithm with the deep learning method to predict the CTU in advance without affecting the quality of the encoding.
- By establishing a sufficient CTU division depth dataset based on shipborne radar digital video, the proposed CTU division depth interval prediction model is trained, which improves the efficiency of predicting the CTU division depth interval in the process of encoding shipborne radar digital video.
- When encoding shipborne radar digital video, the encoder can predict the search depth interval of the CU in advance by calling the trained prediction model, thus effectively reducing the computational redundancy caused by the full RD-cost of CU traversal, while reducing the computational complexity of encoding shipborne radar digital video.
2. Radar Digital Video Coding Depth Division Algorithm Based on Deep Learning
2.1. Characteristics of Radar Images
2.2. Modeling of CTU Division Depth Interval
2.3. Data Set Establishment
3. Time Delay Optimization of Compressing Shipborne Radar Digital Video Based on Deep Learning
3.1. Flow Chart of Compressing Delay Optimization Algorithm
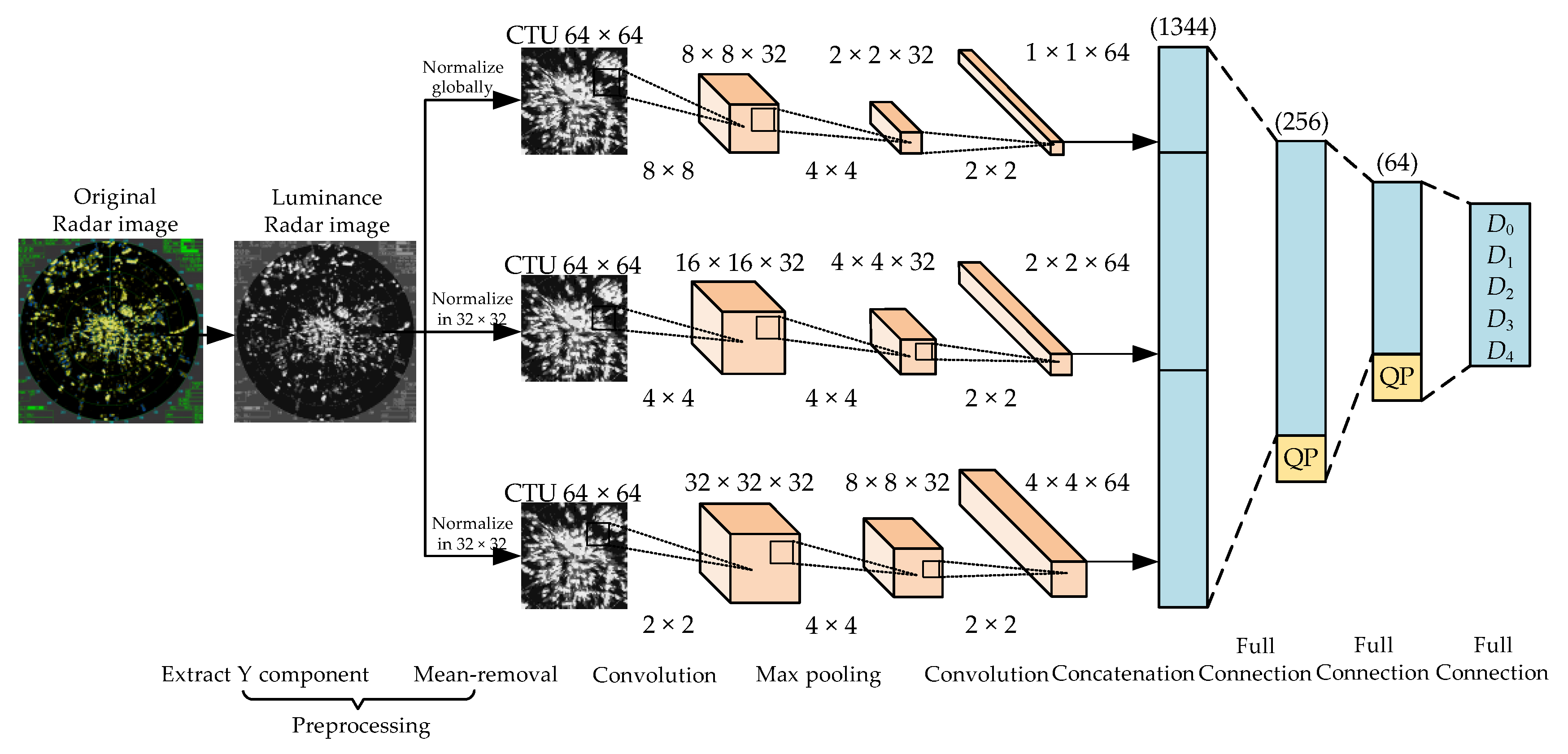
- Input the shipborne radar digital video signal to be compressed into the encoder. If the radar video format is RGB, it will be preprocessed to the YUV format. Before officially starting encoding, the encoder will divide a frame of the radar image into N CTUs to be encoded.
- The Y component of the CTU is input into the trained prediction model—the network structure of the model is shown in Figure 7 (we introduce the structure and training process in detail in Section 3.2)—and the pixel matrix is normalized to accelerate the convergence rate. The output of the model is the probability of Dx.
- Compare the probability of each classification label output by the model to determine the search depth interval of CU in the current CTU. If the probability of D0 is the maximum, the current CTU is not divided directly; that is, the depth is 0, and the RD-cost is no longer traversed downward. If not, determine whether D1 is the maximum. If the probability of D1 is maximum, the CU search depth interval is set to [0, 1], otherwise, the minimum value of the CU search depth interval is set to 1.
- Determine whether D2 is the maximum value; if so, set the maximum value of the CU search depth interval to 2, and calculate the RD-cost of each CU mode within the set CU search depth interval [1, 2] to determine the final CTU division result. Otherwise, judge whether D3 is the maximum value; if so, the maximum value of the CU search depth interval is set to 3, and the set CU search depth interval [1, 3] is traversed to calculate the RD-cost of each mode of the CU to determine the final CTU division result. If not, the minimum value of the CU search depth interval is set to 2.
- Check whether D4 is the maximum value. If D4 is the maximum value, set the maximum value of the CU search depth interval to 3, and calculate the RD-cost of each CU mode within the set CU search depth interval [2, 3] to determine the final CTU division result. If not, initialize the CU search depth interval to [0, 3].
- In the process of predicting the CTU division depth interval, there is a very low probability that the prediction will be inaccurate; that is, if the probability is low or zero, it is not likely to happen. In order to avoid the influence of this situation on the encoded image, the CU search depth interval is initialized to [0, 3] after the fifth step, and the RD-cost of all CUs in each mode is calculated through traversal to determine the final CTU division result.
- In the process of compressing shipborne radar digital video, by limiting the CU search depth interval, a large amount of computational redundancy due to the cost of ergodic rate distortion is reduced. For example, when the prediction result is D2, the encoder stops traversing the RD-cost with a CU depth of 3 and skips the calculation of RD-cost with a CU depth of 0. This speeds up the current CTU encoding rate and reduces the compressed delay to a certain extent.
3.2. CTU Partition Deep Prediction Model Based on Deep Learning
4. Analysis of Experimental Result
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AMVR | Adaptive Motion Vector Resolution |
| AVC | Advanced Video Coding |
| ACT | Adaptive Colour Transform |
| AIS | Automatic Identification System |
| BD-BR | Bjøntegaard Delta Bit Rate |
| BD-PSNR | Bjøntegaard Delta Peak Signal to Noise Rate |
| CTU | Coding Tree Unit |
| CU | Coding Unit |
| CNN | Convolutional Neural Network |
| EPFS | Electronic Position Fixing System |
| FLIS | Frame Level Interval Sampling |
| GT | Gross Tonnage |
| GOP | Group of Pictures |
| HEVC | High Efficiency Video Coding |
| ITU-T | International Telecommunication Union for Telecommunication Standardization Sector |
| ISO | International Organization for Standardization |
| IBC | Intra Block Copy |
| IEC | International Electro technical Commission |
| IMO | International Maritime Organization |
| JCT-VC | Joint Collaborative Team on Video Coding |
| MSC | Maritime Safety Committee |
| NM | Nautical Miles |
| OOW | Officer On Watch |
| PSNR | Peak Signal to Noise Ratio |
| PLT | Palette Mode |
| QP | Quantization Parameter |
| RGB | Red Green Blue |
| RD-cost | Rate Distortion Cost |
| SCC | Screen Content Coding |
| SOLAS | Safety of Life at Sea |
References
- IMO Solas. International Convention for the Safety of Life at Sea (SOLAS). In International Maritime Organization; IMO: London, UK, 2003. [Google Scholar]
- Zhou, Z.; Zhang, Y.; Wang, S. A Coordination System between Decision Making and Controlling for Autonomous Collision Avoidance of Large Intelligent Ships. J. Mar. Sci. Eng. 2021, 9, 1202. [Google Scholar] [CrossRef]
- IMO Resolution MSC.192(79). Adoption of the Revised Performance Standards for Radar Equipment. In International Maritime Organization; IMO: London, UK, 2004. [Google Scholar]
- Topiwala, P.N.; Sullivan, G.; Joch, A.; Kossentini, F. Overview and Performance Evaluation of the ITU-T Draft H.26L Video Coding Standard. In Applications of Digital Image Processing XXIV; International Society for Optics and Photonics: San Diego, CA, USA, 2001; Volume 4472, pp. 290–306. [Google Scholar] [CrossRef]
- Xu, J.; Joshi, R.; Cohen, R.A. Overview of the Emerging HEVC Screen Content Coding Extension. IEEE Trans. Circuits Syst. Video Technol. 2016, 26, 50–62. [Google Scholar] [CrossRef] [Green Version]
- Budagavi, M.; Kwon, D.K. Intra Motion Compensation and Entropy Coding Improvements for HEVC Screen Content Coding. In 2013 Picture Coding Symposium, PCS 2013—Proceedings; IEEE: Manhattan, NY, USA, 2013; pp. 365–368. [Google Scholar] [CrossRef]
- Pu, W.; Karczewicz, M.; Joshi, R.; Seregin, V.; Zou, F.; Sole, J.; Sun, Y.C.; der Chuang, T.; Lai, P.; Liu, S.; et al. Palette Mode Coding in HEVC Screen Content Coding Extension. IEEE J. Emerg. Sel. Top. Circuits Syst. 2016, 6, 420–432. [Google Scholar] [CrossRef]
- Badry, E.; Shalaby, A.; Sayed, M.S. Fast Algorithm with Palette Mode Skipping and Splitting Early Termination for HEVC Screen Content Coding. In Proceedings of the 2019 IEEE 62nd International Midwest Symposium on Circuits and Systems (MWSCAS), Dallas, TX, USA, 4–7 August 2019; pp. 606–609. [Google Scholar] [CrossRef]
- Zhu, W.; Zhang, K.; An, J.; Huang, H.; Sun, Y.C.; Huang, Y.W.; Lei, S. Inter-Palette Coding in Screen Content Coding. IEEE Trans. Broadcasting 2017, 63, 673–679. [Google Scholar] [CrossRef]
- Zhang, L.; Xiu, X.; Chen, J.; Marta, K.; He, Y.; Ye, Y.; Xu, J.; Sole, J.; Kim, W.S. Adaptive Color-Space Transform in HEVC Screen Content Coding. IEEE J. Emerg. Sel. Top. Circuits Syst. 2016, 6, 446–459. [Google Scholar] [CrossRef]
- Peng, W.H.; Walls, F.G.; Cohen, R.A.; Xu, J.; Ostermann, J.; MacInnis, A.; Lin, T. Overview of Screen Content Video Coding: Technologies, Standards, and Beyond. IEEE J. Emerg. Sel. Top. Circuits Syst. 2016, 6, 393–408. [Google Scholar] [CrossRef]
- Li, B.; Xu, J. A Fast Algorithm for Adaptive Motion Compensation Precision in Screen Content Coding. In Data Compression Conference Proceedings; IEEE: Manhattan, NY, USA, 2015; pp. 243–252. [Google Scholar] [CrossRef]
- Correa, G.; Assuncao, P.; Agostini, L.; da Silva Cruz, L.A. Performance and Computational Complexity Assessment of High-Efficiency Video Encoders. IEEE Trans. Circuits Syst. Video Technol. 2012, 22, 1899–1909. [Google Scholar] [CrossRef]
- Xu, M.; Li, T.; Wang, Z.; Deng, X.; Yang, R.; Guan, Z. Reducing Complexity of HEVC: A Deep Learning Approach. IEEE Trans. Image Process. 2018, 27, 5044–5059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yi, Q.; Lin, C.; Shi, M. HEVC Fast Coding Unit Partition Algorithm Based on Deep Learning. J. Chin. Comput. Syst. 2021, 42, 368–373. [Google Scholar]
- Wang, T.; Li, F.; Qiao, X.; Cosman, P.C. Low-Complexity Error Resilient HEVC Video Coding: A Deep Learning Approach. IEEE Trans. Image Process. 2021, 30, 1245–1260. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Schiopu, I.; Munteanu, A. Deep Learning Based Angular Intra-Prediction for Lossless HEVC Video Coding. In Data Compression Conference Proceedings; IEEE: Manhattan, NY, USA, 2019; p. 579. [Google Scholar] [CrossRef]
- Schiopu, I.; Huang, H.; Munteanu, A. CNN-Based Intra-Prediction for Lossless HEVC. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 1816–1828. [Google Scholar] [CrossRef]
- Huang, H.; Schiopu, I.; Munteanu, A. Low-Complexity Angular Intra-Prediction Convolutional Neural Network for Lossless HEVC. In Proceedings of the IEEE 22nd International Workshop on Multimedia Signal Processing, MMSP 2020, Tampere, Finland, 21–24 September 2020. [Google Scholar] [CrossRef]
- Ting, H.C.; Fang, H.L.; Wang, J.S. Complexity Reduction on HEVC Intra Mode Decision with Modified LeNet-5. In Proceedings of the 2019 IEEE International Conference on Artificial Intelligence Circuits and Systems, AICAS 2019, Hsinchu, Taiwan, 18–20 March 2019; pp. 20–24. [Google Scholar] [CrossRef]
- Kuang, W.; Chan, Y.L.; Tsang, S.H.; Siu, W.C. DeepSCC: Deep Learning-Based Fast Prediction Network for Screen Content Coding. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 1917–1932. [Google Scholar] [CrossRef]
- Feng, Z.; Liu, P.; Jia, K.; Duan, K. HEVC Fast Intra Coding Based CTU Depth Range Prediction. In Proceedings of the 2018 3rd IEEE International Conference on Image, Vision and Computing, ICIVC 2018, Chongqing, China, 27–29 June 2018; pp. 551–555. [Google Scholar] [CrossRef]
- Huang, S.; Zhang, Q.; Li, M.; Zheng, X. Fast HEVC SCC Intra-Frame Coding Algorithm Based on Deep Learning. Comput. Eng. 2020, 46, 42–47. [Google Scholar]
- Kuanar, S.; Rao, K.R.; Bilas, M.; Bredow, J. Adaptive CU Mode Selection in HEVC Intra Prediction: A Deep Learning Approach. Circuits Syst. Signal Process. 2019, 38, 5081–5102. [Google Scholar] [CrossRef]
- Bouaafia, S.; Khemiri, R.; Sayadi, F.E.; Atri, M. Fast CU Partition-Based Machine Learning Approach for Reducing HEVC Complexity. J. Real-Time Image Process. 2019, 17, 185–196. [Google Scholar] [CrossRef]
- IMO SN.1/Circ.243/Rev.2. Guidelines for the Presentation of Navigation-Related Symbols, Terms and Abbreviations. In NCSR 6/WP.4 Report of The Navigational Working Group; IMO: London, UK, 2019. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Depth Range of CTU | Category Label | Depth Interval of CU Search |
|---|---|---|
| None | ||
| [0, 1] | ||
| [1, 2] | ||
| [1, 2, 3] | ||
| [2, 3] |
| Radar Range | Background | Number of Sequences | Frames | Samples in Frame | Raw Samples Amount | Samples Amount after FLIS |
|---|---|---|---|---|---|---|
| 1.5 NM (1:1) | Anchor | 12 | 3600 | 16 × 16 | 921,600 | 92,160 |
| Under way | 16 | 4800 | 1,228,800 | 122,880 | ||
| Port | 16 | 4800 | 1,228,800 | 122,880 | ||
| 1.5 NM (5:4) | Anchor | 8 | 2400 | 20 × 16 | 768,000 | 76,800 |
| Under way | 12 | 3600 | 1,152,000 | 115,200 | ||
| Port | 16 | 4800 | 1,536,000 | 153,600 | ||
| 3 NM (1:1) | Anchor | 20 | 6000 | 16 × 16 | 1,536,000 | 153,600 |
| Under way | 12 | 3600 | 921,600 | 92,160 | ||
| Port | 12 | 3600 | 921,600 | 92,160 | ||
| 3 NM (5:4) | Anchor | 20 | 6000 | 20 × 16 | 1,920,000 | 192,000 |
| Under way | 10 | 3000 | 960,000 | 96,000 | ||
| Port | 18 | 5400 | 1,728,000 | 172,800 | ||
| 6 NM (1:1) | Anchor | 14 | 4200 | 16 × 16 | 1,075,200 | 107,520 |
| Under way | 8 | 2400 | 614,400 | 61,440 | ||
| Port | 12 | 3600 | 921,600 | 92,160 | ||
| 6 NM (5:4) | Anchor | 12 | 3600 | 20 × 16 | 1,152,000 | 115,200 |
| Under way | 12 | 3600 | 1,152,000 | 115,200 | ||
| Port | 8 | 2400 | 768,000 | 76,800 | ||
| 12 NM (1:1) | Anchor | 4 | 1200 | 16 × 16 | 307,200 | 30,720 |
| Under way | 16 | 4800 | 1,228,800 | 122,880 | ||
| Port | 10 | 3000 | 768,000 | 76,800 | ||
| 12 NM (5:4) | Anchor | 4 | 1200 | 20 × 16 | 384,000 | 38,400 |
| Under way | 16 | 4800 | 1,536,000 | 153,600 | ||
| Port | 10 | 3000 | 960,000 | 96,000 |
| Radar Range | Train Set | Validation Set | Test Set | Total |
|---|---|---|---|---|
| 1.5 NM | 546,816 | 68,352 | 68,352 | 683,520 |
| 3 NM | 638,976 | 79,872 | 79,872 | 798,720 |
| 6 NM | 454,656 | 56,832 | 56,832 | 568,320 |
| 12 NM | 414,720 | 51,840 | 51,840 | 518,400 |
| Total | 2,055,168 | 256,896 | 256,896 | 2,568,960 |
| Radar Range | Background | BD-BR/% | BD-PSNR/dB | |||||
|---|---|---|---|---|---|---|---|---|
| QP = 22 | QP = 27 | QP = 32 | QP = 37 | Average | ||||
| 1.5 NM | Anchor | 2.92 | −0.21 | −33.22 | −36.43 | −40.89 | −42.69 | −38.31 |
| Under way | 1.22 | −0.15 | −42.56 | −46.00 | −49.35 | −51.36 | −47.32 | |
| Port | 2.95 | −0.22 | −36.14 | −38.55 | −41.36 | −42.30 | −39.59 | |
| 3 NM | Anchor | 3.00 | −0.23 | −25.37 | −26.56 | −29.98 | −33.09 | −28.75 |
| Under way | 1.36 | −0.16 | −41.36 | −42.33 | −44.10 | −46.85 | −43.66 | |
| Port | 2.96 | −0.22 | −27.12 | −29.88 | −32.09 | −33.84 | −30.73 | |
| 6 NM | Anchor | 2.84 | −0.21 | −36.98 | −39.76 | −43.45 | −44.52 | −41.18 |
| Under way | 1.57 | −0.17 | −33.65 | −34.10 | −35.87 | −37.54 | −35.29 | |
| Port | 2.51 | −0.19 | −38.01 | −40.57 | −43.81 | −44.30 | −41.67 | |
| 12 NM | Anchor | 2.30 | −0.19 | −40.29 | −43.84 | −46.98 | −48.12 | −44.81 |
| Under way | 1.33 | −0.16 | −39.45 | −41.28 | −43.01 | −45.47 | −42.30 | |
| Port | 2.21 | −0.18 | −40.20 | −42.31 | −47.44 | −48.13 | −44.52 | |
| Average | 2.26 | −0.19 | −36.20 | −38.47 | −41.53 | −43.18 | −39.84 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, H.; Zhang, Y.; Wang, Z. Time Delay Optimization of Compressing Shipborne Radar Digital Video Based on Deep Learning. J. Mar. Sci. Eng. 2021, 9, 1279. https://doi.org/10.3390/jmse9111279
Lu H, Zhang Y, Wang Z. Time Delay Optimization of Compressing Shipborne Radar Digital Video Based on Deep Learning. Journal of Marine Science and Engineering. 2021; 9(11):1279. https://doi.org/10.3390/jmse9111279
Chicago/Turabian StyleLu, Hongrui, Yingjun Zhang, and Zhuolin Wang. 2021. "Time Delay Optimization of Compressing Shipborne Radar Digital Video Based on Deep Learning" Journal of Marine Science and Engineering 9, no. 11: 1279. https://doi.org/10.3390/jmse9111279
APA StyleLu, H., Zhang, Y., & Wang, Z. (2021). Time Delay Optimization of Compressing Shipborne Radar Digital Video Based on Deep Learning. Journal of Marine Science and Engineering, 9(11), 1279. https://doi.org/10.3390/jmse9111279