
Modelling of Parametric Resonance for Heaving Buoys with Position-Varying Waterplane Area



Abstract
1. Introduction
1.1. Parametric Resonance in Heaving Wave Energy Converters
1.2. Modelling and Analysis of Parametric Resonance
1.3. Outline and Objectives of Paper
2. Mathematical Model
2.1. Conventional Linear Hydrodynamic Model
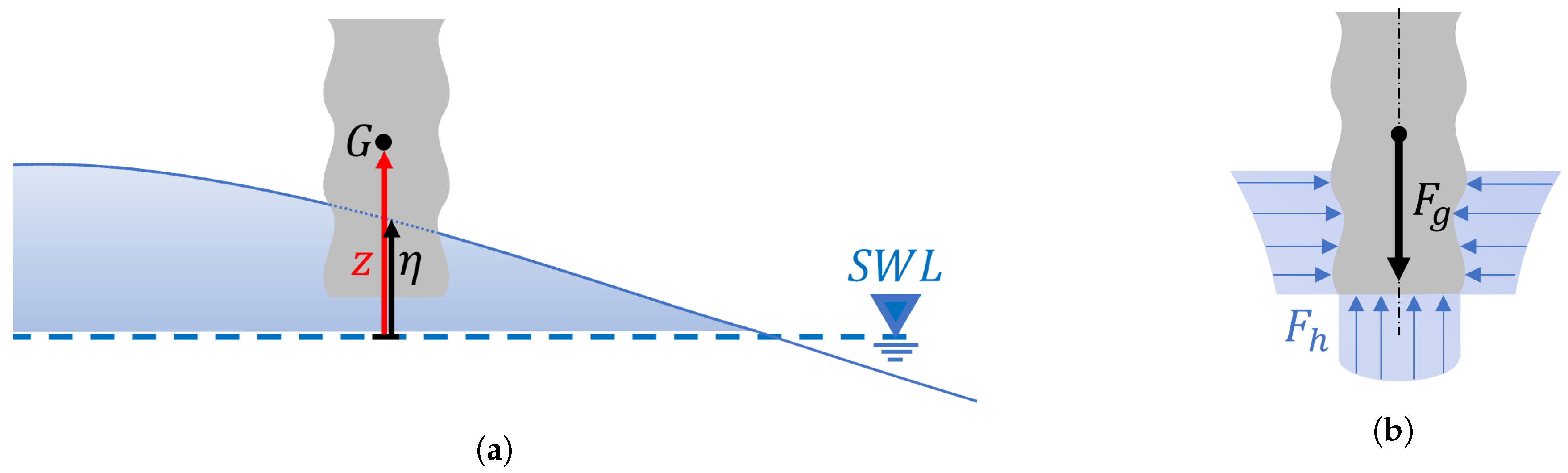
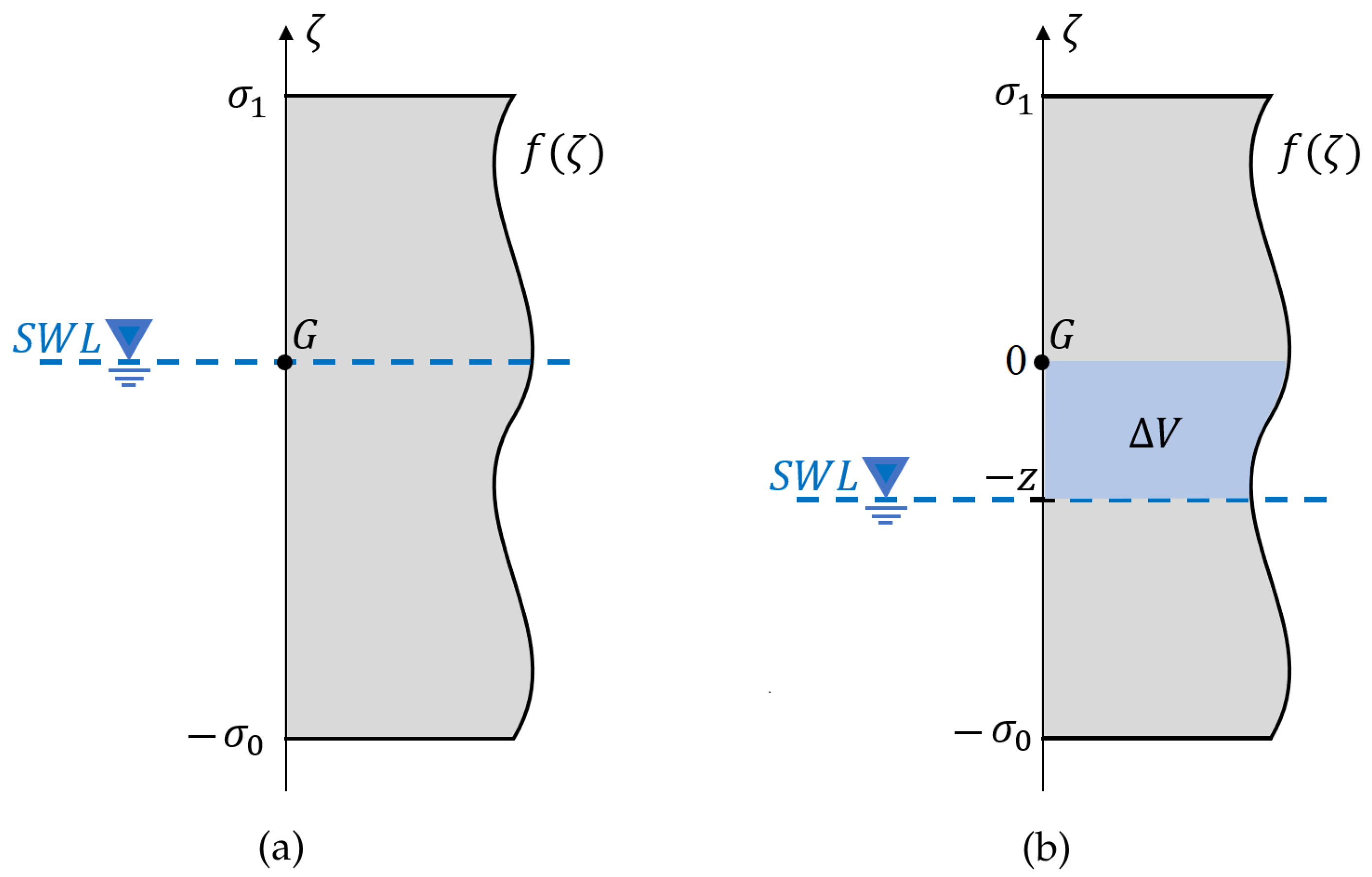
2.1.1. The Hydrostatic Restoring Force
2.1.2. The Wave Radiation Force
2.1.3. The Wave Excitation Force
2.1.4. The Linear Hydrodynamic Model
2.2. Analytical Model for Parametric Resonance
2.2.1. Nonlinear Hydrostatic Restoring Force
2.2.2. Parametric Excitation
2.2.3. Mathieu Type Equation
3. Test Case
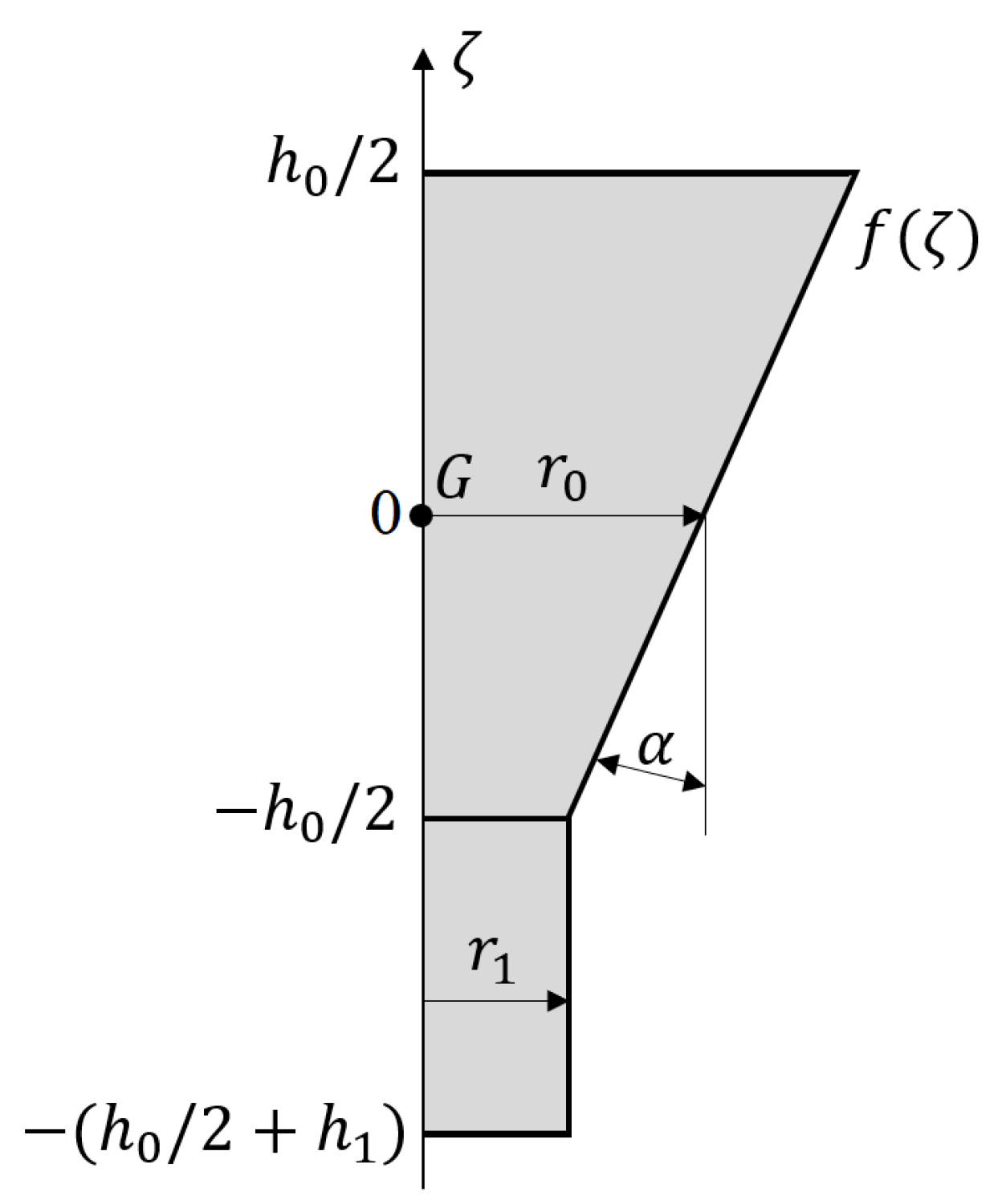
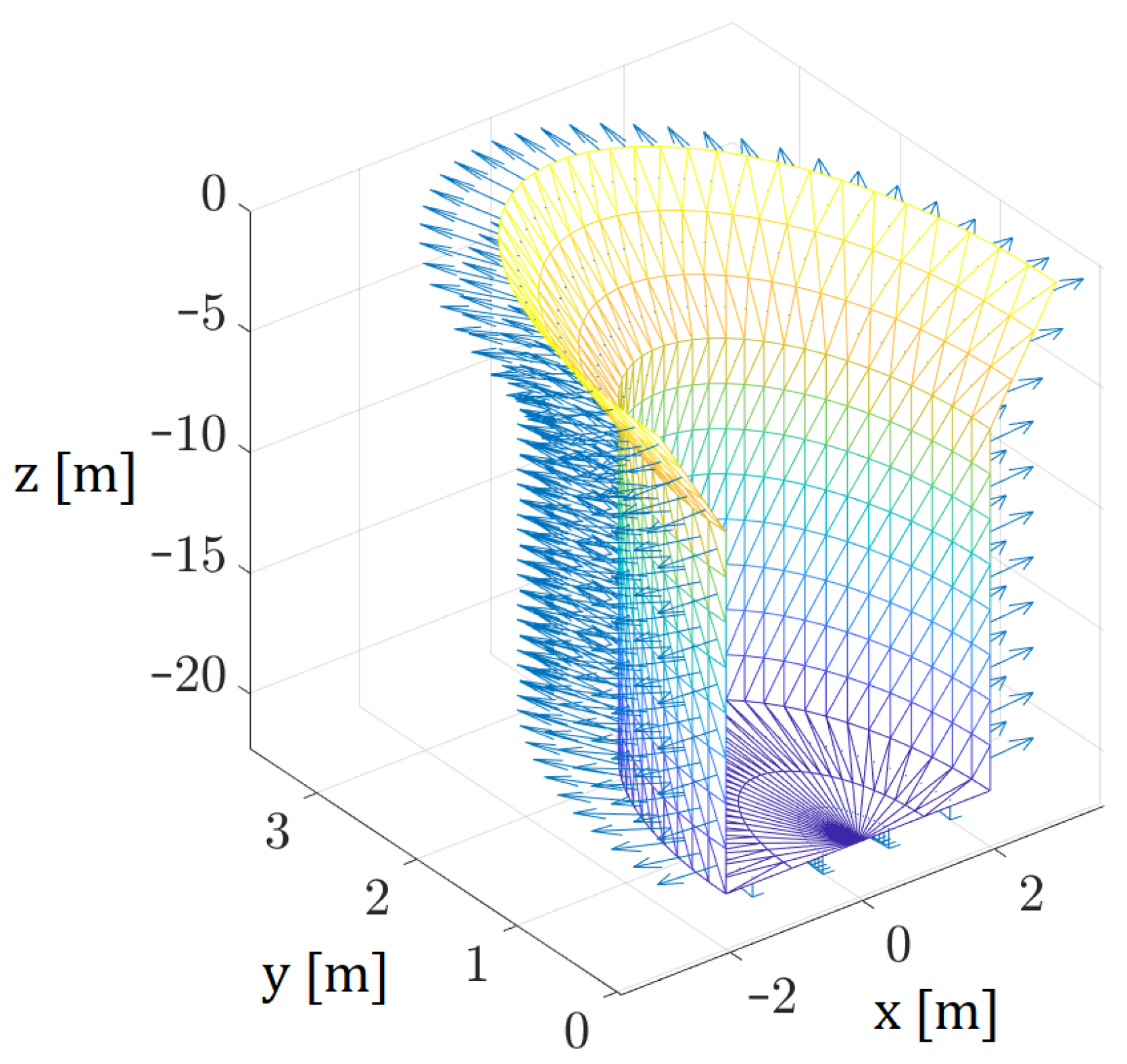
3.1. Test Case Geometry
3.2. The Analytical Model
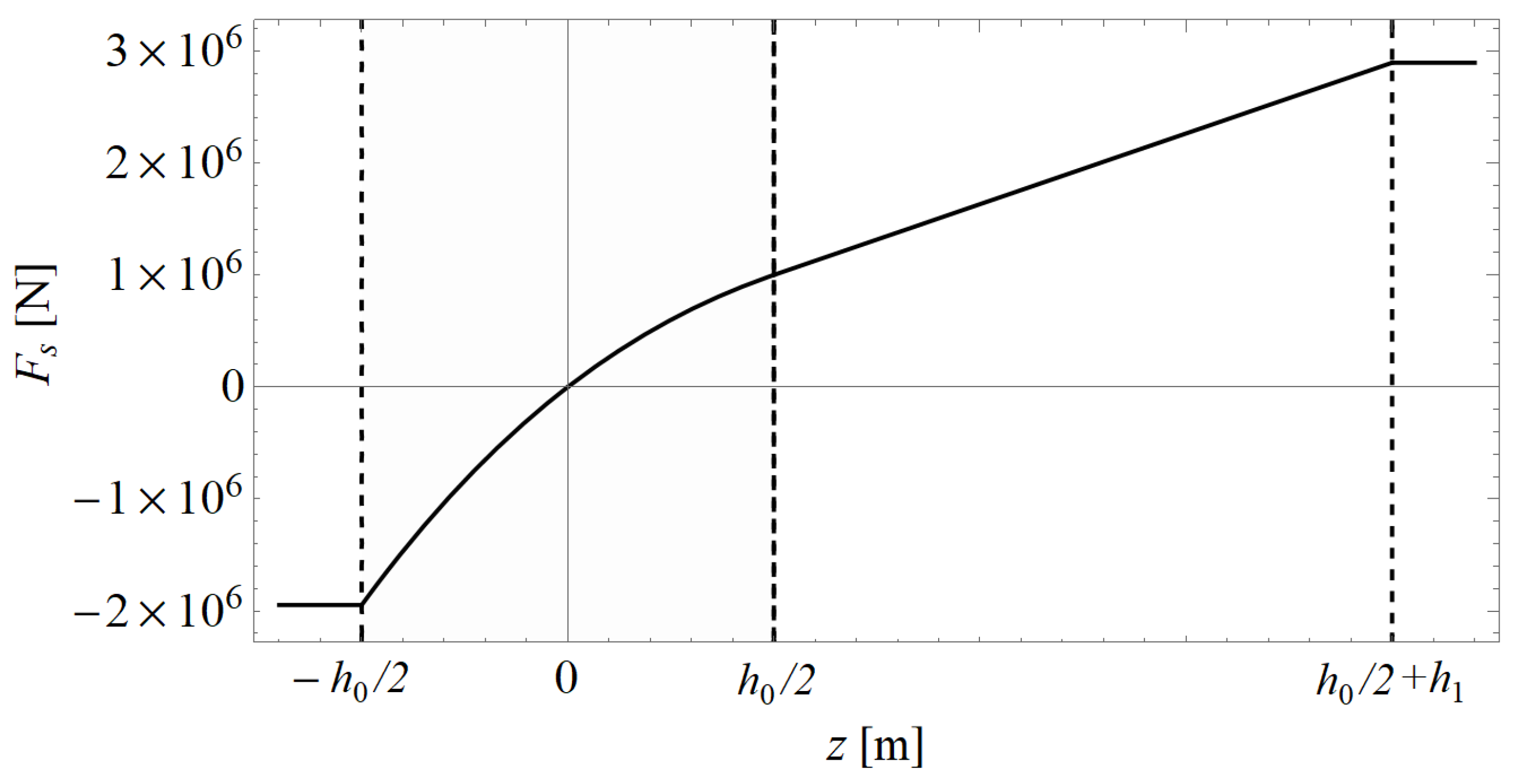
3.2.1. Hydrostatic Restoring Force
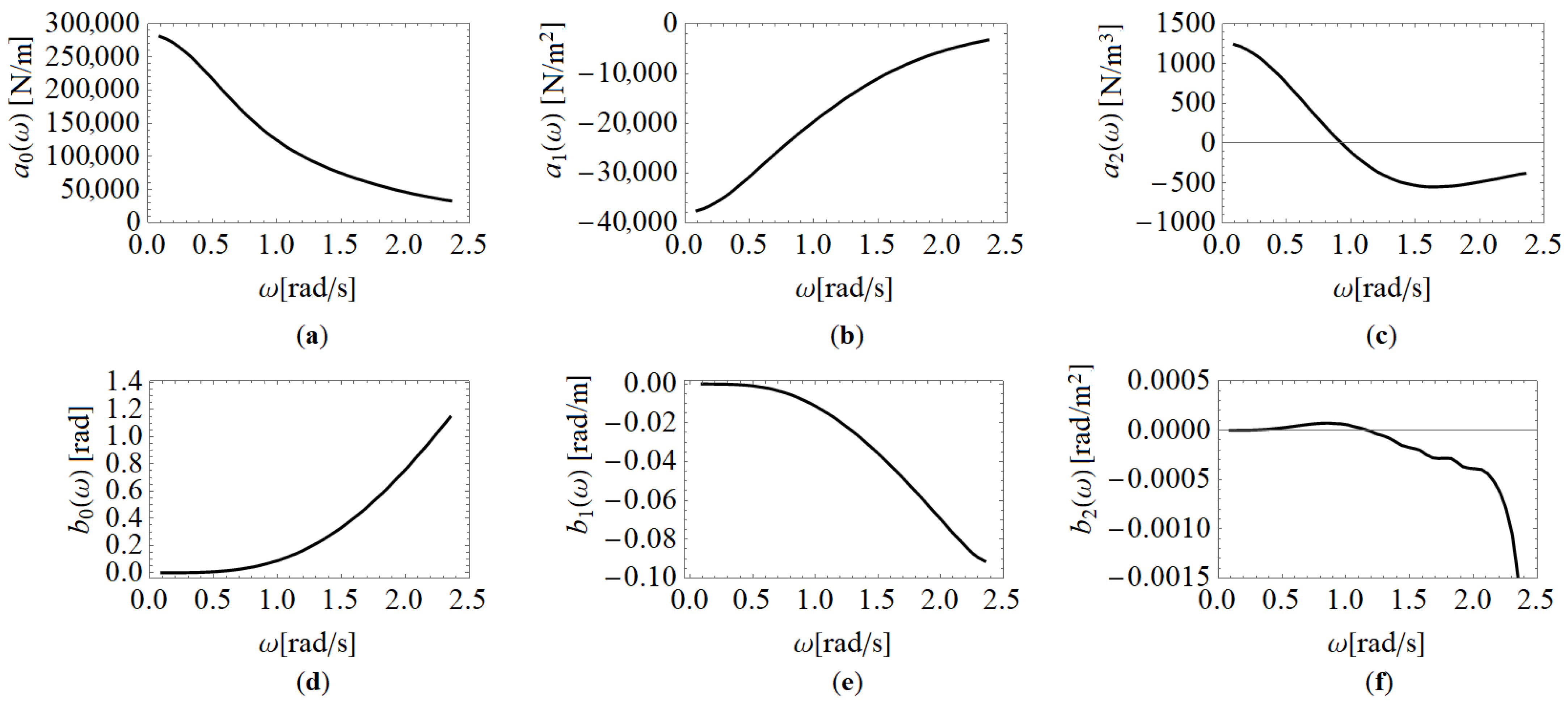
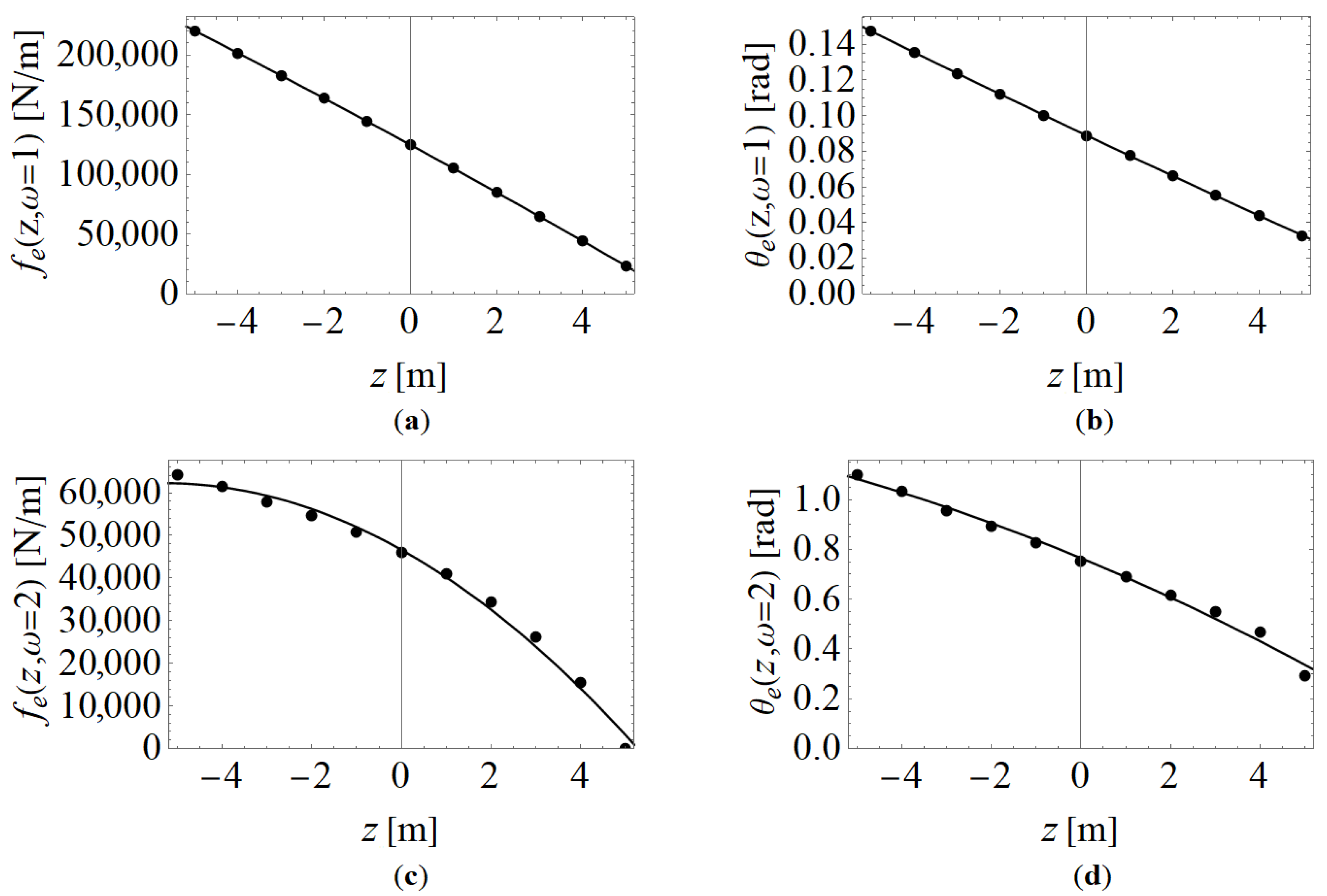
3.2.2. Parametric Excitation
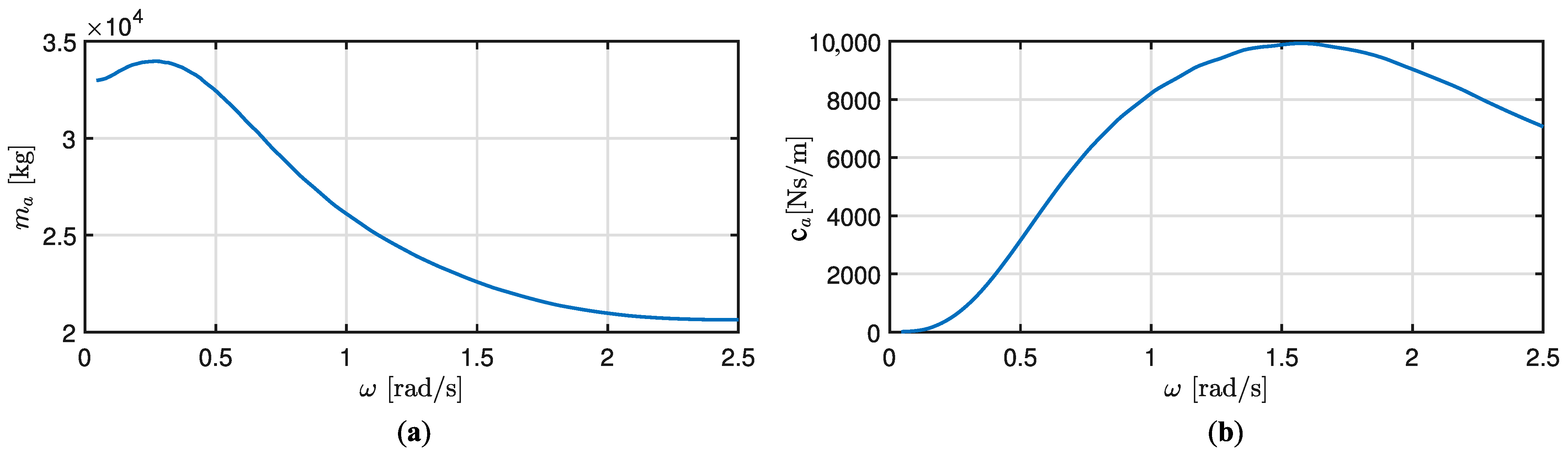
3.2.3. Wave Radiation Force
3.3. The Nonlinear Hydrostatic Restoring Force Model
3.4. The Nonlinear Froude–Krylov Force Model
4. Results
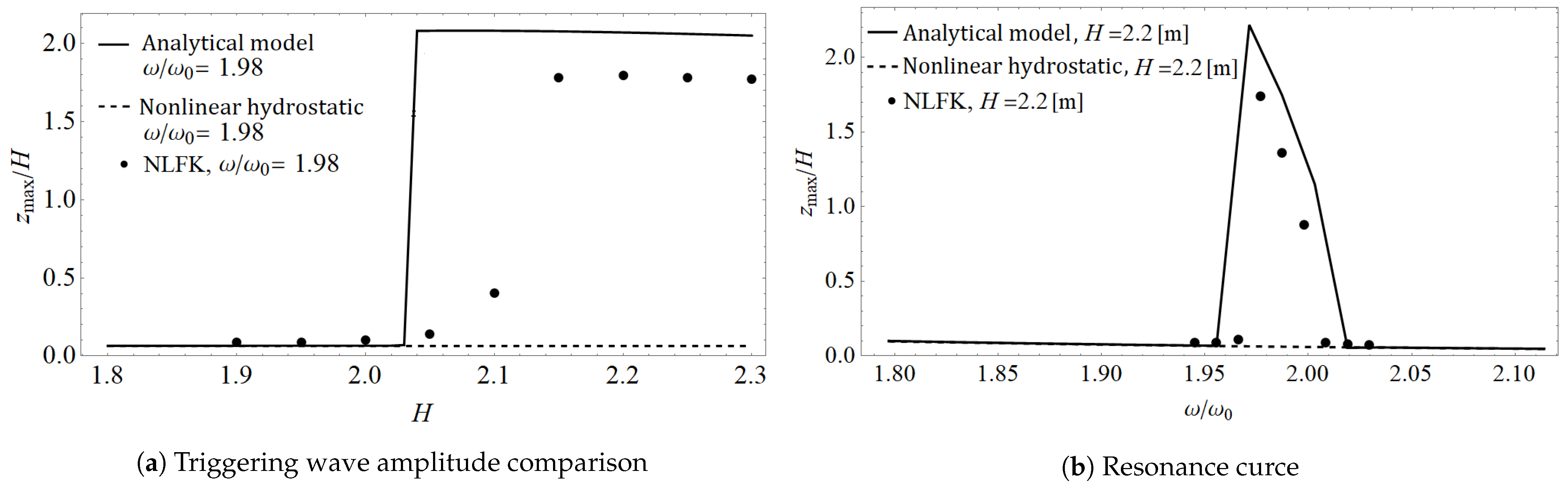
4.1. Comparison against Nonlinear Hydrostatic Restoring Force Model
4.2. Code-to-Code Verification against a NLFK Force Model
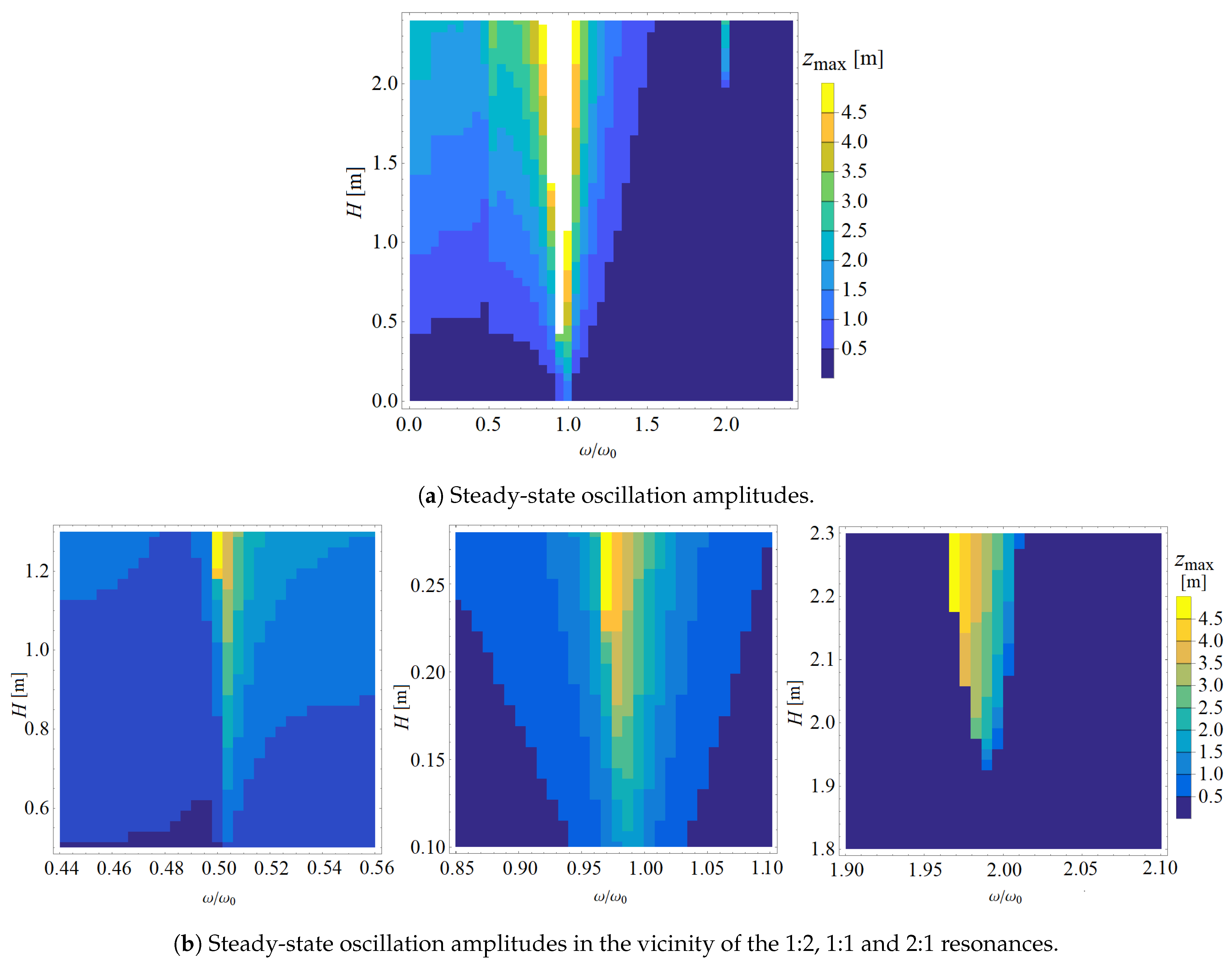
4.3. Two-Parameter Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Antonio, F.d.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar]
- Aderinto, T.; Li, H. Ocean wave energy converters: Status and challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef]
- Fossen, T.; Nijmeijer, H. Parametric Resonance in Dynamical Systems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Falnes, J. Ocean Waves and Oscillating Systems; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Folley, M. Numerical Modelling of Wave Energy Converters: State-of-the-Art Techniques for Single Devices and Arrays; Academic Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Davidson, J.; Costello, R. Efficient nonlinear hydrodynamic models for wave energy converter design—A scoping study. J. Mar. Sci. Eng. 2020, 8, 35. [Google Scholar] [CrossRef]
- Arvin, H.; Tang, Y.Q.; Nadooshan, A.A. Dynamic stability in principal parametric resonance of rotating beams: Method of multiple scales versus differential quadrature method. Int. J. Non-Linear Mech. 2016, 85, 118–125. [Google Scholar] [CrossRef]
- Verhulst, F. Perturbation Analysis of Parametric Resonance. Encycl. Complex. Syst. Sci. 2009, 113, 6625–6639. [Google Scholar]
- Nayfeh, A.; Zavodney, L.D. The response of two-degree-of-freedom systems with quadratic non-linearities to a combination parametric resonance. J. Sound Vib. 1986, 107, 329–350. [Google Scholar] [CrossRef]
- Warminski, J.; Kecik, K. Instabilities in the main parametric resonance area of a mechanical system with a pendulum. J. Sound Vib. 2009, 322, 612–628. [Google Scholar] [CrossRef]
- Rand, R.; Barcilon, A.; Morrison, T. Parametric resonance of Hopf bifurcation. Nonlinear Dyn. 2005, 39, 411–421. [Google Scholar] [CrossRef]
- Son, I.S.; Uchiyama, Y.; Lacarbonara, W.; Yabuno, H. versdsfsfsf. Nonlinear Dyn. 2008, 53, 129–138. [Google Scholar] [CrossRef]
- Froude, W. On the Rolling of Ships; Institution of Naval Architects: London, UK, 1861. [Google Scholar]
- Nayfeh, A.H.; Mook, D.T.; Marshall, L.R. Nonlinear coupling of pitch and roll modes in ship motions. J. Hydronautics 1973, 7, 145–152. [Google Scholar] [CrossRef]
- Neves, M.A.; Rodriguez, C.A. On unstable ship motions resulting from strong non-linear coupling. Ocean Eng. 2006, 33, 1853–1883. [Google Scholar] [CrossRef]
- Galeazzi, R. Autonomous Supervision and Control of Parametric Roll Resonance. Ph.D. Thesis, Technical University of Denmark, Department of Naval Architecture and Offshore Engineering, Lyngby, Denmark, 2009. [Google Scholar]
- Shigunov, V.; El Moctar, O.; Rathje, H.; Germanischer Lloyd, A. Conditions of parametric rolling. In Proceedings of the 10th International Conference on Stability of Ships and Ocean Vehicles, St. Petersburg, Russia, 22–26 June 2009. [Google Scholar]
- Moideen, H.; Falzarano, J. A critical assessment of ship parametric roll analysis. In Proceedings of the 11th International Ship Stability Workshop (ISSW), Wageningen, The Netherlands, 21–23 June 2010; pp. 21–23. [Google Scholar]
- Dern, J.C. Unstable motion of free spar buoys in waves. In Proceedings of the 9th Symposium on Naval Hydrodynamics, ONR, Paris, France, 20–25 August 1972. [Google Scholar]
- Koo, B.; Kim, M.; Randall, R. Mathieu instability of a spar platform with mooring and risers. Ocean Eng. 2004, 31, 2175–2208. [Google Scholar] [CrossRef]
- Neves, M.A.; Sphaier, S.H.; Mattoso, B.M.; Rodriguez, C.A.; Santos, A.L.; Vileti, V.L.; Torres, F. On the occurrence of Mathieu instabilities of vertical cylinders. In Proceedings of the 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Li, B.B.; Ou, J.P.; Teng, B. Numerical investigation of damping effects on coupled heave and pitch motion of an innovative deep draft multi-spar. J. Mar. Sci. Technol. 2011, 19, 231–244. [Google Scholar] [CrossRef]
- Jang, H.; Kim, M. Mathieu instability of Arctic Spar by nonlinear time-domain simulations. Ocean Eng. 2019, 176, 31–45. [Google Scholar] [CrossRef]
- Haslum, H.; Faltinsen, O. Alternative shape of spar platforms for use in hostile areas. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 3–6 May 1999. [Google Scholar]
- Rho, J.B.; Choi, H.S.; Shin, H.S.; Park, I.K. A study on Mathieu-type instability of conventional spar platform in regular waves. Int. J. Offshore Polar Eng. 2005, 15, 104–108. [Google Scholar]
- Umeda, N.; Hashimoto, H.; Minegaki, S.; Matsuda, A. An investigation of different methods for the prevention of parametric rolling. J. Mar. Sci. Technol. 2008, 13, 16–23. [Google Scholar] [CrossRef]
- Galeazzi, R.; Pettersen, K.Y. Controlling Parametric Resonance: Induction and Stabilization of Unstable Motions. In Parametric Resonance in Dynamical Systems; Fossen, T.I., Nijmeijer, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 305–327. [Google Scholar]
- Yang, H.; Xu, P. Effect of hull geometry on parametric resonances of spar in irregular waves. Ocean Eng. 2015, 99, 14–22. [Google Scholar] [CrossRef]
- Sheng, W.; Flannery, B.; Lewis, A.; Alcorn, R. Experimental studies of a floating cylindrical OWC WEC. In Proceedings of the ASME 2012 31st International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Gomes, R.; Henriques, J.; Gato, L.; Falcao, A. Testing of a small-scale floating OWC model in a wave flume. In Proceedings of the International Conference on Ocean Energy, Dublin, Ireland, 17–19 October 2012; pp. 1–7. [Google Scholar]
- Gomes, R.; Henriques, J.; Gato, L.; Falcão, A.d.O. Wave channel tests of a slack-moored floating oscillating water column in regular waves. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015; pp. 6–11. [Google Scholar]
- Beatty, S.J.; Roy, A.; Bubbar, K.; Ortiz, J.; Buckham, B.J.; Wild, P.; Stienke, D.; Nicoll, R. Experimental and numerical simulations of moored self-reacting point absorber wave energy converters. In Proceedings of the Twenty-fifth International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Gomes, R.; Henriques, J.; Gato, L.; Falcão, A. Experimental Tests of a 1: 16th-Scale Model of the Spar-Buoy OWC in a Large Scale Wave Flume in Regular Waves. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 1–22 June 2018; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2018. [Google Scholar]
- Kurniawan, A.; Grassow, M.; Ferri, F. Numerical modelling and wave tank testing of a self-reacting two-body wave energy device. In Ships and Offshore Structures; Taylor and Francis Group: London, UK, 2019; pp. 1–13. [Google Scholar]
- Gomes, R.; Henriques, J.; Gato, L.; Falcão, A. Time-domain simulation of a slack-moored floating oscillating water column and validation with physical model tests. Renew. Energy 2020, 149, 165–180. [Google Scholar] [CrossRef]
- Gomes, R.; Malvar Ferreira, J.; Ribeiro e Silva, S.; Henriques, J.; Gato, L. An experimental study on the reduction of the dynamic instability in the oscillating water column spar buoy. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Ortiz, J.P. The Influence of Mooring Dynamics on the Performance of Self Reacting Point Absorbers. Master’s Thesis, University of Victoria, Victoria, BC, Canada, 2016. [Google Scholar]
- Gomes, R.; Henriques, J.; Gato, L.; Falcao, A. An upgraded model for the design of spar-type floating oscillating water column devices. In Proceedings of the 13th European Wave and Tidal Energy Conference, Napoli, Italy, 1–6 September 2019. [Google Scholar]
- Villegas, C.; van der Schaaf, H. Implementation of a pitch stability control for a wave energy converter. In Proceedings of the 10th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Maloney, P. Performance Assessment of a 3-Body Self-Reacting Point Absorber Type Wave Energy Converter. Master’s Thesis, University of Victoria, Victoria, BC, Canada, 2019. [Google Scholar]
- Davidson, J.; Gomes, R.; Galeazzi, R.; Henriques, J. Blowing the Top on Parametric Resonance—Relief Valve Control for the Stabiliation of an OWC Spar Buoy. In Proceedings of the ASME 2020 39th International Conference on Ocean, Offshore and Arctic Engineering, Online. 3–7 August 2020; Available online: https://asmedigitalcollection.asme.org/OMAE/proceedings-abstract/OMAE2020/84416/V009T09A033/1093150 (accessed on 18 October 2021).
- Davidson, J.; Henriques, J.C.; Gomes, R.P.; Galeazzi, R. Opening the air-chamber of an oscillating water column spar buoy wave energy converter to avoid parametric resonance. IET Rene. Power Gener. 2021, 1–17. [Google Scholar] [CrossRef]
- Davidson, J.; Kalmár-Nagy, T. A Real-Time Detection System for the Onset of Parametric Resonance in Wave Energy Converters. J. Mar. Sci. Eng. 2020, 8, 819. [Google Scholar] [CrossRef]
- Abdelkhalik, O.; Zou, S.; Robinett, R.; Bacelli, G.; Wilson, D.; Coe, R. Control of three degrees-of-freedom wave energy converters using pseudo-spectral methods. J. Dyn. Syst. Meas. Control 2018, 140, 074501. [Google Scholar] [CrossRef]
- Zou, S.; Abdelkhalik, O.; Robinett, R.; Korde, U.; Bacelli, G.; Wilson, D.; Coe, R. Model Predictive Control of parametric excited pitch-surge modes in wave energy converters. Int. J. Mar. Energy 2017, 19, 32–46. [Google Scholar] [CrossRef]
- Abdelkhalik, O.; Zou, S. Time-varying linear quadratic gaussian optimal control for three-degree-of-freedom wave energy converters. In Proceedings of the European Wave and Tidal Energy Conference, College Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Zou, S.; Abdelkhalik, O. Time-varying linear quadratic Gaussian optimal control for three-degree-of-freedom wave energy converters. Renew. Energy 2020, 149, 217–225. [Google Scholar] [CrossRef]
- Orazov, B.; O’Reilly, O.; Savaş, Ö. On the dynamics of a novel ocean wave energy converter. J. Sound Vib. 2010, 329, 5058–5069. [Google Scholar] [CrossRef]
- Orazov, B. A Novel Excitation Scheme for an Ocean Wave Energy Converter. Ph.D. Thesis, UC Berkeley, Berkeley, CA, USA, 2011. [Google Scholar]
- Orazov, B.; O’Reilly, O.M.; Zhou, X. On forced oscillations of a simple model for a novel wave energy converter. Nonlinear Dyn. 2012, 67, 1135–1146. [Google Scholar] [CrossRef]
- Rougirel, A. Mathematical analysis of a wave energy converter model. Nonlinear Anal. Real World Appl. 2013, 14, 434–454. [Google Scholar] [CrossRef]
- Diamond, C.A.; O’Reilly, O.M.; Savaş, Ö. The impulsive effects of momentum transfer on the dynamics of a novel ocean wave energy converter. J. Sound Vib. 2013, 332, 5559–5565. [Google Scholar] [CrossRef]
- Diamond, C.A.; Judge, C.Q.; Orazov, B.; Savaş, Ö. Mass-modulation schemes for a class of wave energy converters: Experiments, models, and efficacy. Ocean Eng. 2015, 104, 452–468. [Google Scholar] [CrossRef]
- O’Reilly, O.M.; Savaş, Ö.; Judge, C.Q.; Namachchivaya, N.S. Preliminary Experimental Results for a Novel Wave Energy Converter. In Proceedings of the NSF Engineering Research and Innovation Conference, Atlanta, GA, USA, 4–7 January 2011. [Google Scholar]
- Xu, X. Nonlinear Dynamics of Parametric Pendulum for Wave Energy Extraction. Ph.D. Thesis, University of Aberdeen, Aberdeen, UK, 2005. [Google Scholar]
- Horton, B.W.; Wiercigroch, M. Effects of heave excitation on rotations of a pendulum for wave energy extraction. In IUTAM Symposium on Fluid-Structure Interaction in Ocean Engineering; Springer: Berlin/Heidelberg, Germany, 2008; pp. 117–128. [Google Scholar]
- Horton, B. Rotational Motion of Pendula Systems for Wave Energy Extraction. Ph.D. Thesis, University of Aberdeen, Aberdeen, UK, 2009. [Google Scholar]
- Najdecka, A.; Vaziri, V.; Wiercigroch, M. Synchronization control of parametric pendulums for wave energy extraction. In Proceedings of the International Conference on Renewable Energies and Power Quality, Granada, Spain, 23–25 March 2010. [Google Scholar]
- Wiercigroch, M.; Najdecka, A.; Vaziri, V. Nonlinear dynamics of pendulums system for energy harvesting. In Vibration Problems ICOVP 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 35–42. [Google Scholar]
- Lenci, S.; Rega, G. Experimental versus theoretical robustness of rotating solutions in a parametrically excited pendulum: A dynamical integrity perspective. Phys. D Nonlinear Phenom. 2011, 240, 814–824. [Google Scholar] [CrossRef]
- Lenci, S.; Brocchini, M.; Lorenzoni, C. Experimental rotations of a pendulum on water waves. J. Comput. Nonlinear Dyn. 2012, 7, 011007. [Google Scholar] [CrossRef]
- De Paula, A.S.; Savi, M.A.; Wiercigroch, M.; Pavlovskaia, E. Bifurcation control of a parametric pendulum. Int. J. Bifurc. Chaos 2012, 22, 1250111. [Google Scholar] [CrossRef]
- De Paula, A.S.; Savi, M.A.; Wiercigroch, M.; Pavlovskaia, E. Chaos Control Methods Applied to Avoid Bifurcations in Pendulum Dynamics. In IUTAM Symposium on Nonlinear Dynamics for Advanced Technologies and Engineering Design; Springer: Berlin/Heidelberg, Germany, 2013; pp. 387–395. [Google Scholar]
- Yurchenko, D.; Alevras, P. Dynamics of the N-pendulum and its application to a wave energy converter concept. Int. J. Dyn. Control 2013, 1, 290–299. [Google Scholar] [CrossRef]
- Vaziri, V.; Najdecka, A.; Wiercigroch, M. Experimental control for initiating and maintaining rotation of parametric pendulum. Eur. Phys. J. Spec. Top. 2014, 223, 795–812. [Google Scholar] [CrossRef]
- Alevras, P.; Yurchenko, D. Stochastic rotational response of a parametric pendulum coupled with an SDOF system. Probabilistic Eng. Mech. 2014, 37, 124–131. [Google Scholar] [CrossRef]
- Alevras, P.; Yurchenko, D.; Naess, A. Energy Response Probability Density Function of a Rotating Parametric Pendulum. In Vulnerability, Uncertainty, and Risk: Quantification, Mitigation, and Management; ASCE: Reston, VA, USA, 2014; pp. 1866–1874. [Google Scholar]
- Alevras, P.; Brown, I.; Yurchenko, D. Experimental investigation of a rotating parametric pendulum. Nonlinear Dyn. 2015, 81, 201–213. [Google Scholar] [CrossRef]
- Alevras, P. Rotating Potential of a Stochastic Parametric Pendulum. Ph.D. Thesis, Heriot-Watt University, Edinburgh, UK, 2015. [Google Scholar]
- Andreeva, T.; Alevras, P.; Naess, A.; Yurchenko, D. Dynamics of a parametric rotating pendulum under a realistic wave profile. Int. J. Dyn. Control 2016, 4, 233–238. [Google Scholar] [CrossRef]
- Reguera, F.; Dotti, F.E.; Machado, S.P. Rotation control of a parametrically excited pendulum by adjusting its length. Mech. Res. Commun. 2016, 72, 74–80. [Google Scholar] [CrossRef]
- Yurchenko, D.; Alevras, P. Parametric pendulum based wave energy converter. Mech. Syst. Signal Process. 2018, 99, 504–515. [Google Scholar] [CrossRef]
- Dostal, L.; Korner, K.; Kreuzer, E.; Yurchenko, D. Pendulum energy converter excited by random loads. ZAMM-J. Appl. Math. Mech./Z. Angew. Math. Und Mech. 2018, 98, 349–366. [Google Scholar] [CrossRef]
- Dostal, L.; PICK, M.A. Theoretical and experimental study of a pendulum excited by random loads. Eur. J. Appl. Math. 2019, 30, 912–927. [Google Scholar] [CrossRef]
- Farley, F.J. The free floating clam-a new wave energy converter. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Davidson, J. Energy Harvesting for Marine Based Sensors. Ph.D. Thesis, James Cook University, Townsville, Australia, 2016. [Google Scholar]
- Miquel, A.; Lamberti, A.; Antonini, A.; Archetti, R. The MoonWEC, a new technology for wave energy conversion in the Mediterranean Sea. Ocean Eng. 2020, 217, 107958. [Google Scholar] [CrossRef]
- Windt, C.; Davidson, J.; Ringwood, J. High-fidelity Numerical Modelling of Ocean Wave Energy Systems: A Review of Computational Fluid Dynamics-based Numerical Wave Tanks. Renew. Sustain. Energy Rev. 2017, 93, 610–630. [Google Scholar] [CrossRef]
- Eskilsson, C.; Palm, J.; Bergdahl, L. Simulations of Moored Wave Energy Converters Using OpenFOAM: Implementation and Applications. In Proceedings of the 6th World Maritime Technology Conference, Shanghai, China, 4–7 December 2018. [Google Scholar]
- Palm, J.; Bergdahl, L.; Eskilsson, C. Parametric excitation of moored wave energy converters using viscous and non-viscous CFD simulations. In Advances in Renewable Energies Offshore; Routledge: London, UK, 2019; pp. 455–462. [Google Scholar]
- Tarrant, K.R. Numerical Modelling of Parametric Resonance of a Heaving Point Absorber Wave Energy Converter. Ph.D. Thesis, Trinity College Dublin, Dublin, Ireland, 2015. [Google Scholar]
- Tarrant, K.; Meskell, C. Investigation on parametrically excited motions of point absorbers in regular waves. Ocean Eng. 2016, 111, 67–81. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. A compact 6-DoF nonlinear wave energy device model for power assessment and control investigations. IEEE Trans. Sustain. Energy 2018, 10, 119–126. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. Articulating parametric resonance for an OWC spar buoy in regular and irregular waves. J. Ocean. Eng. Mar. Energy 2018, 4, 311–322. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. Parametric motion detection for an oscillating water column spar buoy. In Proceedings of the 3rd International Conference on Renewable Energies Offshore RENEW, Lisbon, Portugal, 8–10 October 2018. [Google Scholar]
- Giorgi, G.; Gomes, R.P.; Bracco, G.; Mattiazzo, G. The Effect of Mooring Line Parameters in Inducing Parametric Resonance on the Spar-Buoy Oscillating Water Column Wave Energy Converter. J. Mar. Sci. Eng. 2020, 8, 29. [Google Scholar] [CrossRef]
- Giorgi, G.; Gomes, R.P.; Bracco, G.; Mattiazzo, G. Numerical investigation of parametric resonance due to hydrodynamic coupling in a realistic wave energy converter. Nonlinear Dyn. 2020, 101, 153–170. [Google Scholar] [CrossRef] [PubMed]
- Kurniawan, A.; Tran, T.T.; Brown, S.A.; Eskilsson, C.; Orszaghova, J.; Greaves, D. Numerical simulation of parametric resonance in point absorbers using a simplified model. IET Renew. Power Gener. 2021, 15, 3186–3205. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Mathieu, E. Mémoire sur le mouve et vi atoi e d’ueeae de fo e elliptique. J. Math. Pures Appl. 1868, 13, 137–203. [Google Scholar]
- Kerwin, J.E. Notes on rolling in longitudinal waves. Int. Shipbuild. Prog. 1955, 2, 597–614. [Google Scholar] [CrossRef]
- Davidson, J.; Karimov, M.; Szelechman, A.; Windt, C.; Ringwood, J. Dynamic mesh motion in OpenFOAM for wave energy converter simulation. In Proceedings of the 14th OpenFOAM Workshop, Duisburg, Germany, 23–26 July 2019. [Google Scholar]
- Ringwood, J.V.; Davidson, J.; Giorgi, S. Identifying Models Using Recorded Data. In Numerical Modeling of Wave Energy Converter: State-of-the-Art Techniques for Single WEC and Converter Arrays; Elsevier: Amsterdam, The Netherlands, 2016; pp. 123–147. [Google Scholar]
- Hong, Y.P.; Lee, D.Y.; Choi, Y.H.; Hong, S.K.; Kim, S.E. An experimental study on the extreme motion responses of a spar platform in the heave resonant waves. In Proceedings of the Fifteenth International Offshore and Polar Engineering Conference, Seoul, Korea, 19–24 June 2005; pp. 225–232. [Google Scholar]
- Jingrui, Z.; Yougang, T.; Wenjun, S. A study on the combination resonance response of a classic spar platform. J. Vib. Control 2010, 16, 2083–2107. [Google Scholar] [CrossRef]
- Gavassoni, E.; Gonçalves, P.B.; Roehl, D.M. Nonlinear vibration modes and instability of a conceptual model of a spar platform. Nonlinear Dyn. 2014, 76, 809–826. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Zurkinden, A.S.; Ferri, F.; Beatty, S.; Kofoed, J.P.; Kramer, M. Non-linear numerical modeling and experimental testing of a point absorber wave energy converter. Ocean Eng. 2014, 78, 11–21. [Google Scholar] [CrossRef]
- Davidson, J.; Giorgi, S.; Ringwood, J.V. Numerical wave tank identification of nonlinear discrete time hydrodynamic models. In Renewable Energies Offshore; Routledge: London, UK, 2015; p. 279. [Google Scholar]
- Giorgi, G.; Bracco, G.; Mattiazzo, G. NLFK4ALL: An Open-Source Demonstration Toolbox for Computationally Efficient Nonlinear Froude–Krylov Force Calculations. In Proceedings of the 14th WCCM-ECCOMAS Congress 2020, Online. 11–15 January 2021; Volume 1500. Available online: https://www.scipedia.com/public/Giorgi_et_al_2021a (accessed on 18 October 2021).
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015. [Google Scholar]
- Giorgi, G.; Ringwood, J.V. Relevance of pressure field accuracy for nonlinear Froude–Krylov force calculations for wave energy devices. J. Ocean. Eng. Mar. Energy 2018, 4, 57–71. [Google Scholar] [CrossRef]
- Giorgi, G. Nonlinear Froude–Krylov Matlab Demonstration Toolbox; Version 2.1; Zenodo: Geneve, Switzerland, 2019. [Google Scholar]
- Bhinder, M.A.; Babarit, A.; Gentaz, L.; Ferrant, P. Assessment of viscous damping via 3d-cfd modelling of a floating wave energy device. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011; pp. 5–9. [Google Scholar]
- Bhinder, M.A.; Babarit, A.; Gentaz, L.; Ferrant, P. Potential time domain model with viscous correction and CFD analysis of a generic surging floating wave energy converter. Int. J. Mar. Energy 2015, 10, 70–96. [Google Scholar] [CrossRef]
- Nematbakhsh, A.; Michailidis, K.; Gao, Z.; Moan, T. Comparison of experimental data of a moored multibody wave energy device with a hybrid CFD and BIEM numerical analysis framework. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering Volume 9: Ocean Renewable Energy, St. John’s, NL, Canada, 31 May–5 June 2015; American Society of Mechanical Engineers (ASME): New York, NY, USA, 2015. [Google Scholar]
- Giorgi, G.; Ringwood, J.V. Consistency of Viscous Drag Identification Tests for Wave Energy Applications. In Proceedings of the 12th European Wave and Tidal Energy Conference (EWTEC 2017), Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Jin, S.; Patton, R.J.; Guo, B. Viscosity effect on a point absorber wave energy converter hydrodynamics validated by simulation and experiment. Renew. Energy 2018, 129, 500–512. [Google Scholar] [CrossRef]
- Gu, H.; Stansby, P.; Stallard, T.; Moreno, E.C. Drag, added mass and radiation damping of oscillating vertical cylindrical bodies in heave and surge in still water. J. Fluids Struct. 2018, 82, 343–356. [Google Scholar] [CrossRef]
- Chen, Z.f.; Zhou, B.z.; Zhang, L.; Zhang, W.c.; Wang, S.q.; Zang, J. Geometrical evaluation on the viscous effect of point-absorber wave-energy converters. China Ocean Eng. 2018, 32, 443–452. [Google Scholar] [CrossRef]
- Bhinder, M.A.; Murphy, J. Evaluation of the Viscous Drag for a Domed Cylindrical Moored Wave Energy Converter. J. Mar. Sci. Eng. 2019, 7, 120. [Google Scholar] [CrossRef]
- Zabala, I.; Henriques, J.; Blanco, J.; Gomez, A.; Gato, L.; Bidaguren, I.; Falcão, A.; Amezaga, A.; Gomes, R. Wave-induced real-fluid effects in marine energy converters: Review and application to OWC devices. Renew. Sustain. Energy Rev. 2019, 111, 535–549. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units | |
|---|---|---|---|
| Opening angle of the conical part | 11.31 | ||
| Radius of the conical part at equilibrium state at still water level | 3 | ||
| Half-length of the conical part | 5 | ||
| Radius of the cylindrical extension | 2 | ||
| Length of the cylindrical extension | 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lelkes, J.; Davidson, J.; Kalmár-Nagy, T. Modelling of Parametric Resonance for Heaving Buoys with Position-Varying Waterplane Area. J. Mar. Sci. Eng. 2021, 9, 1162. https://doi.org/10.3390/jmse9111162
Lelkes J, Davidson J, Kalmár-Nagy T. Modelling of Parametric Resonance for Heaving Buoys with Position-Varying Waterplane Area. Journal of Marine Science and Engineering. 2021; 9(11):1162. https://doi.org/10.3390/jmse9111162
Chicago/Turabian StyleLelkes, János, Josh Davidson, and Tamás Kalmár-Nagy. 2021. "Modelling of Parametric Resonance for Heaving Buoys with Position-Varying Waterplane Area" Journal of Marine Science and Engineering 9, no. 11: 1162. https://doi.org/10.3390/jmse9111162
APA StyleLelkes, J., Davidson, J., & Kalmár-Nagy, T. (2021). Modelling of Parametric Resonance for Heaving Buoys with Position-Varying Waterplane Area. Journal of Marine Science and Engineering, 9(11), 1162. https://doi.org/10.3390/jmse9111162